A Fast Method to Compute the Dynamic Response of Induction Motor Loads Considering the Negative-Sequence Components in Stability Studies

Abstract
:1. Introduction
2. Traditional Transient Stability Model of an IM
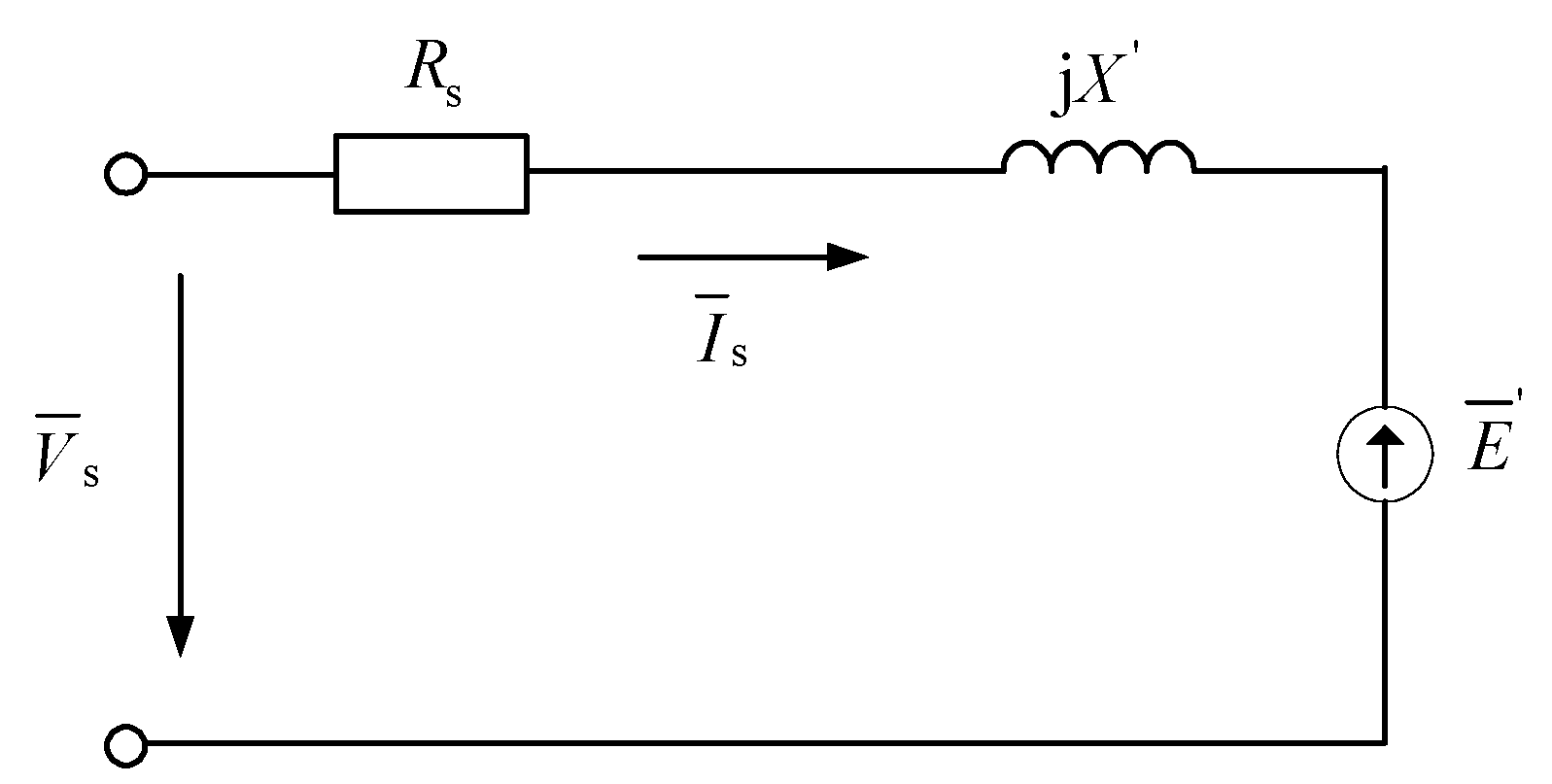
2.1. TS Model of an IM
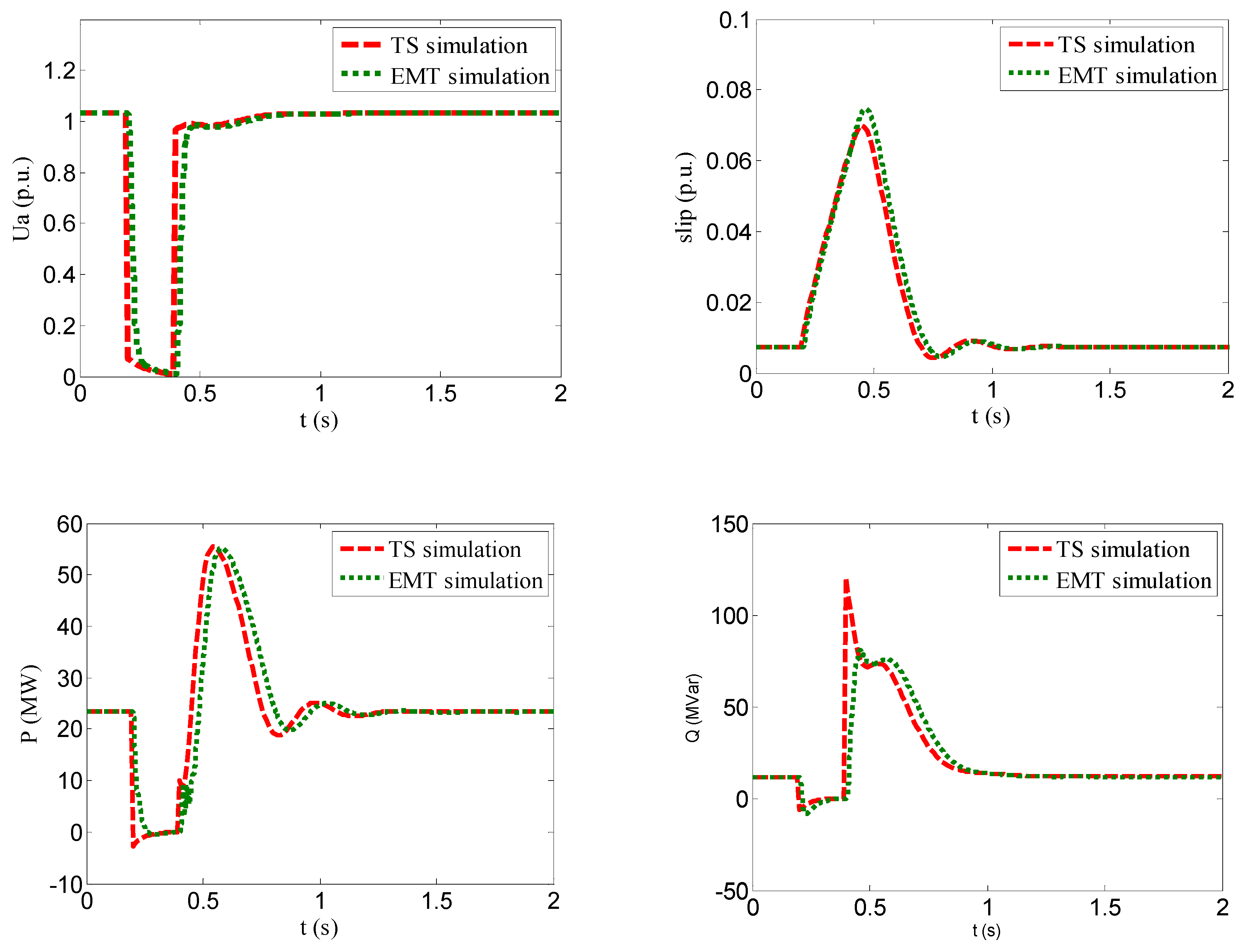
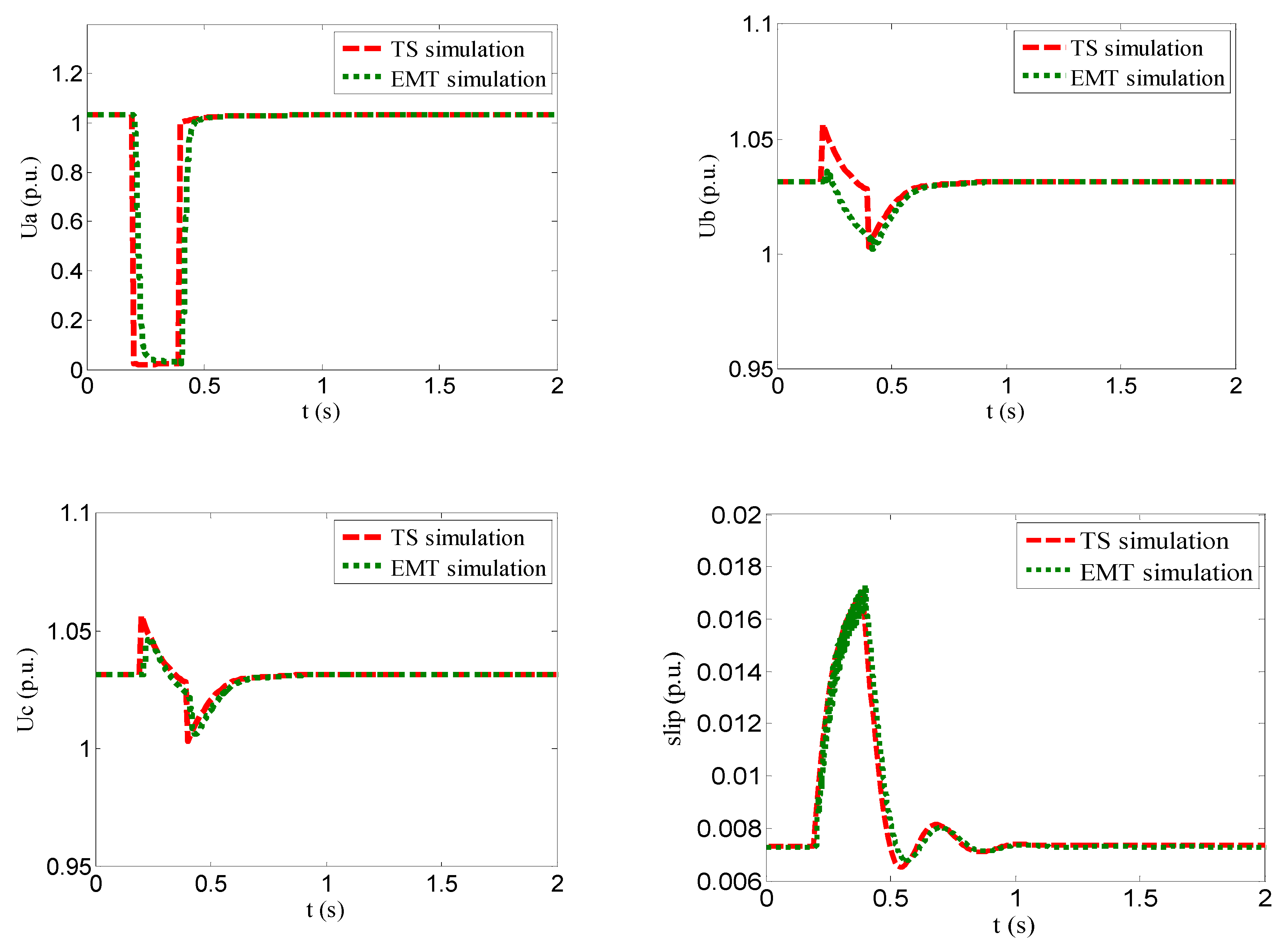
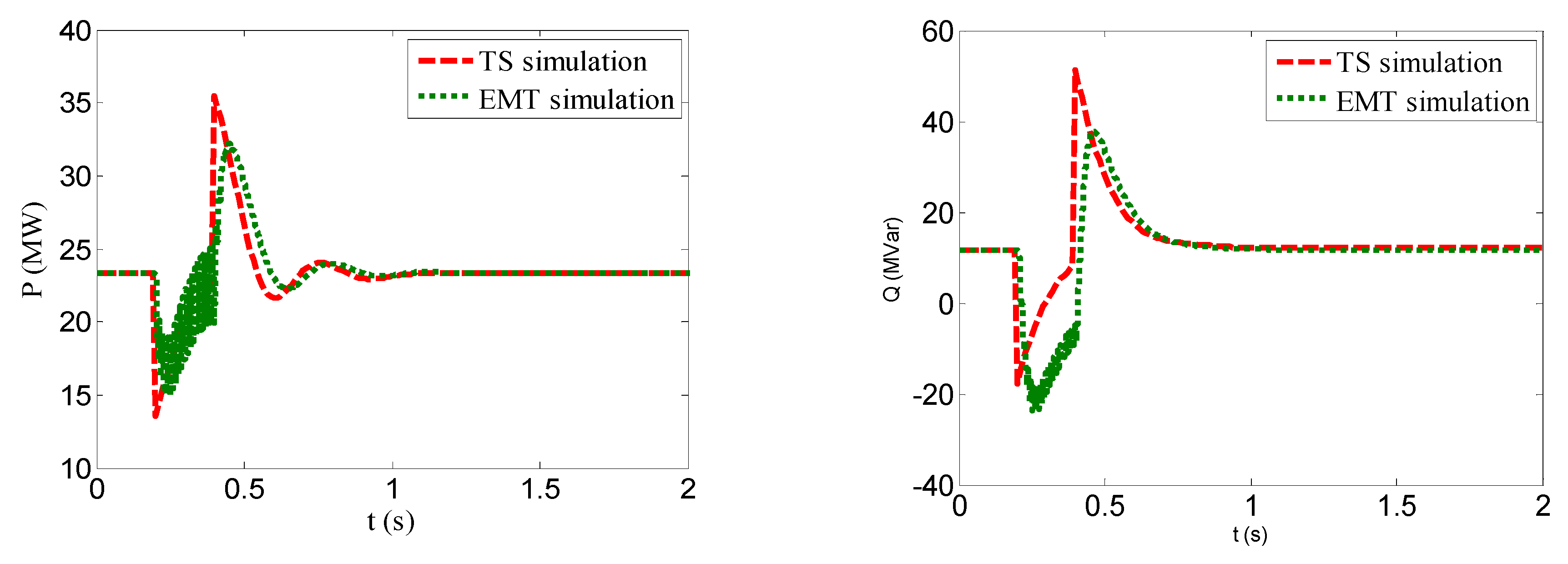
2.2. The Performance of the Traditional TS Model of an IM
3. Integrated TS Model of an IM Considering Negative-Sequence Components
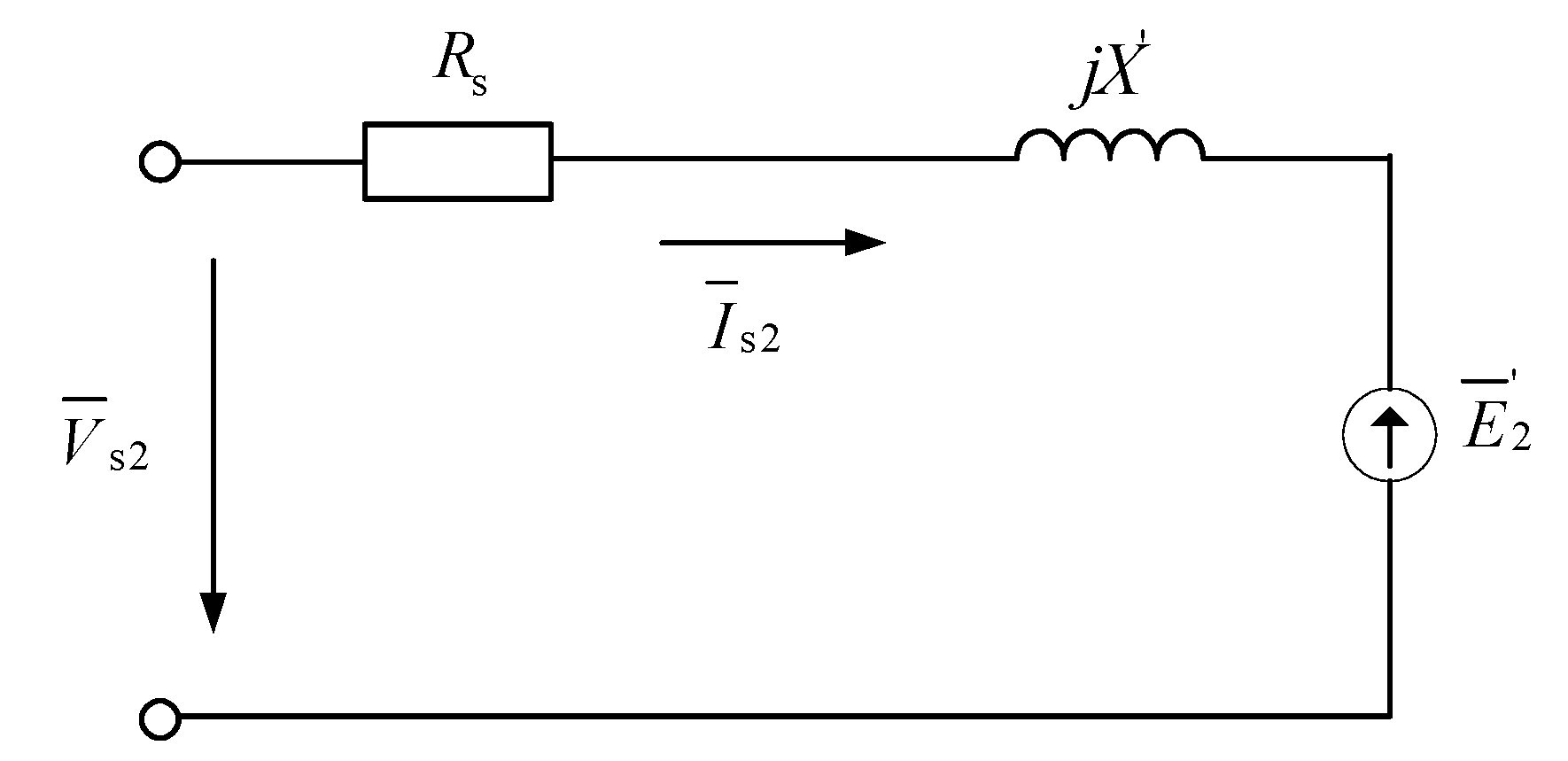
3.1. Derivation Process of the Traditional TS Model of an IM
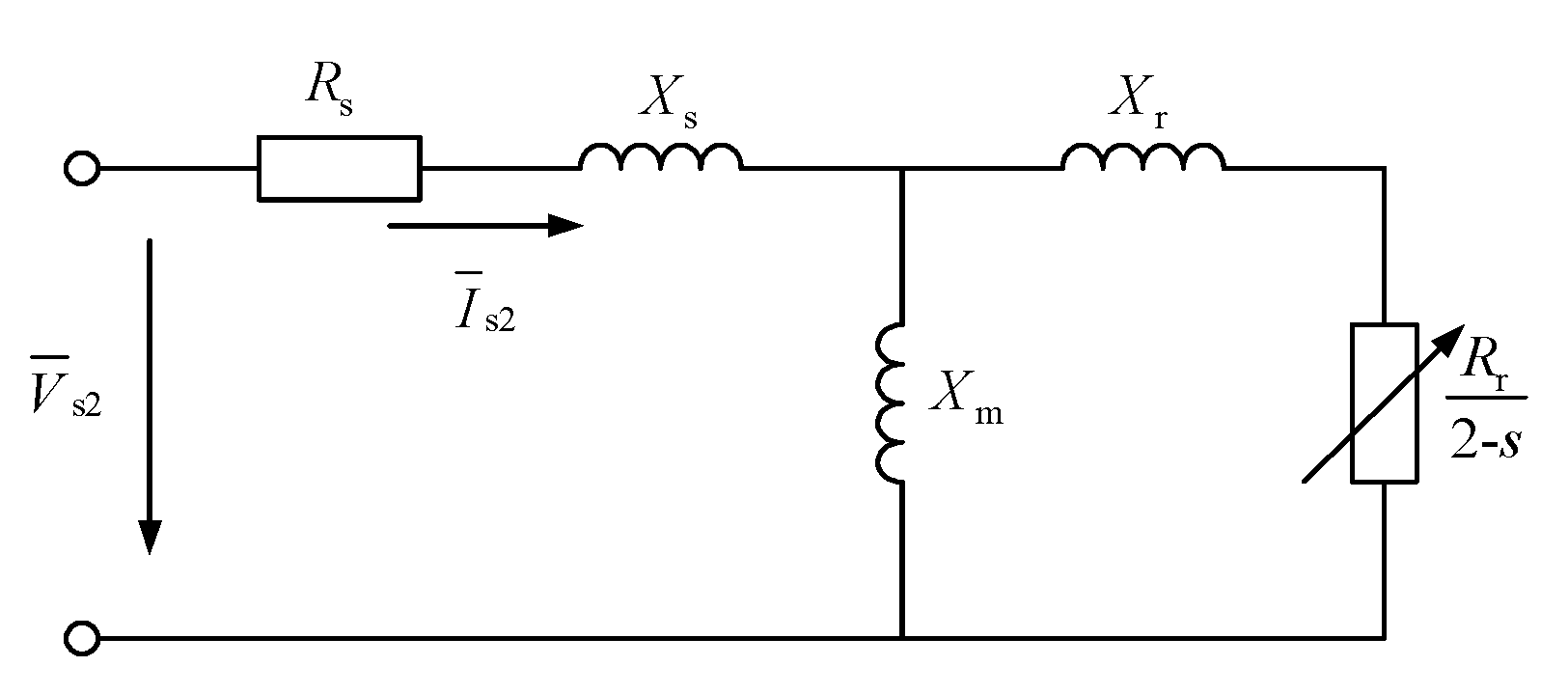
3.2. Negative-Sequence TS Model of an IM
3.3. Integrated TS Model of an IM Including Positive- and Negative-Sequence Components
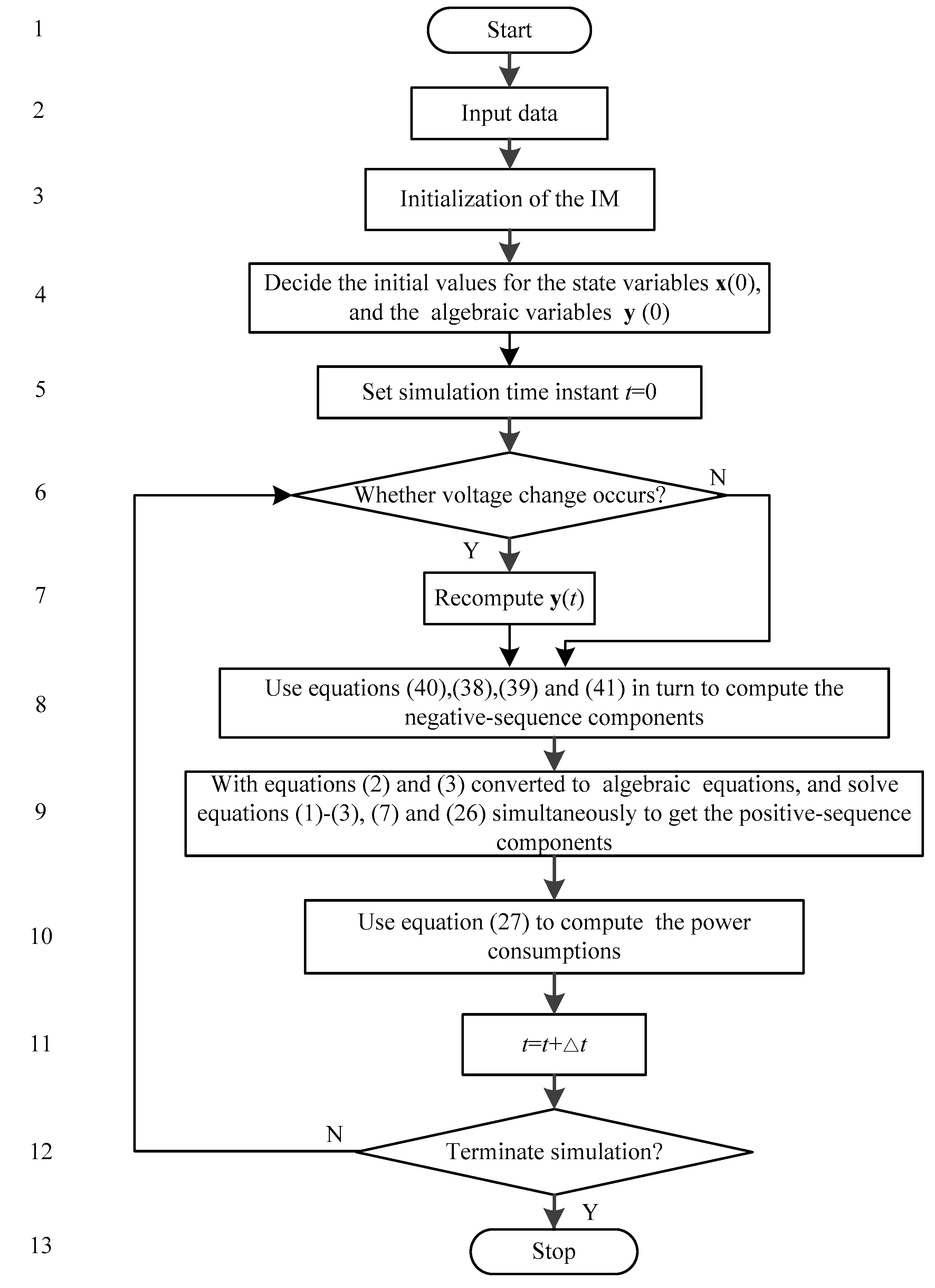
4. Solution of the Integrated Model of an IM
4.1. A Regular Solution Method
4.2. Approximate Treatment of the Negative-Sequence Components
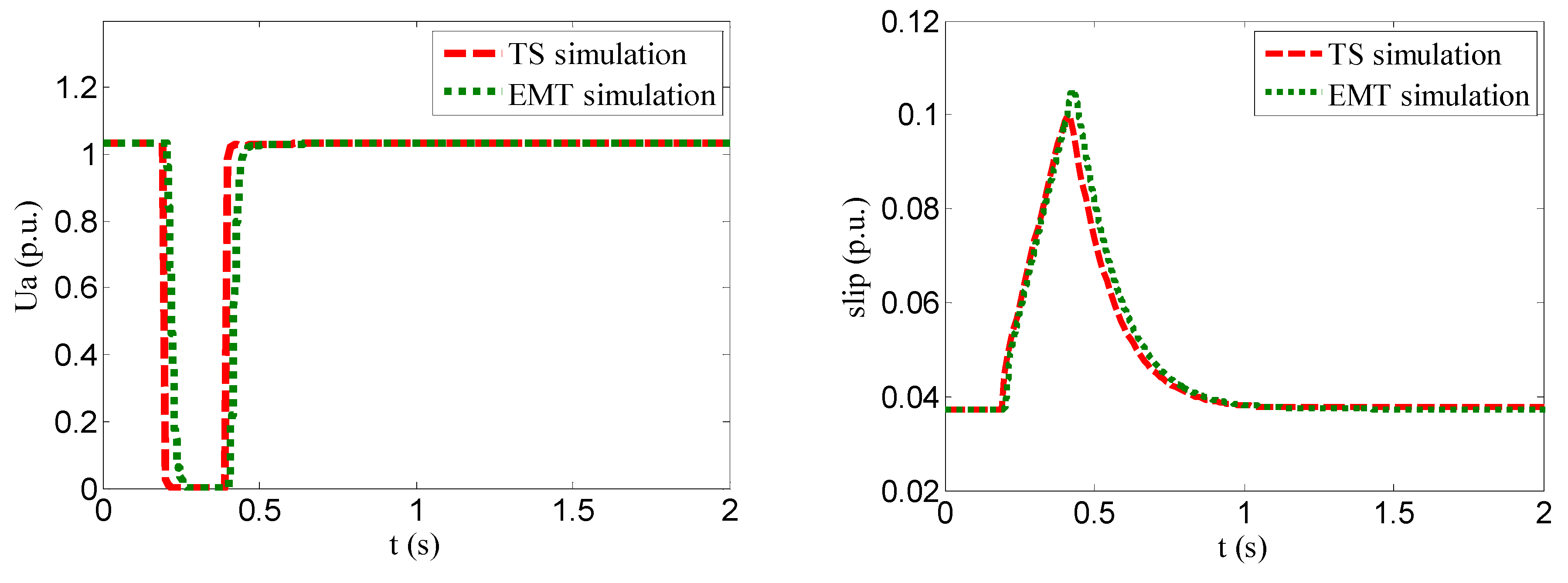
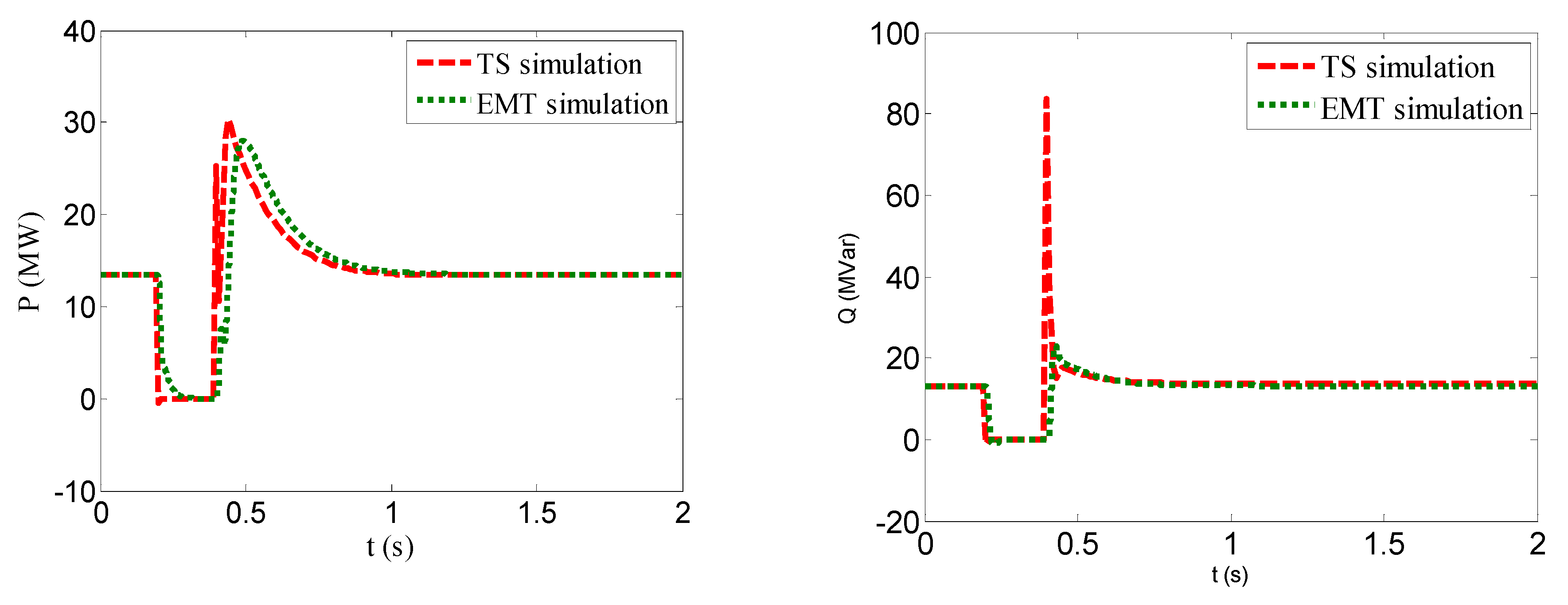
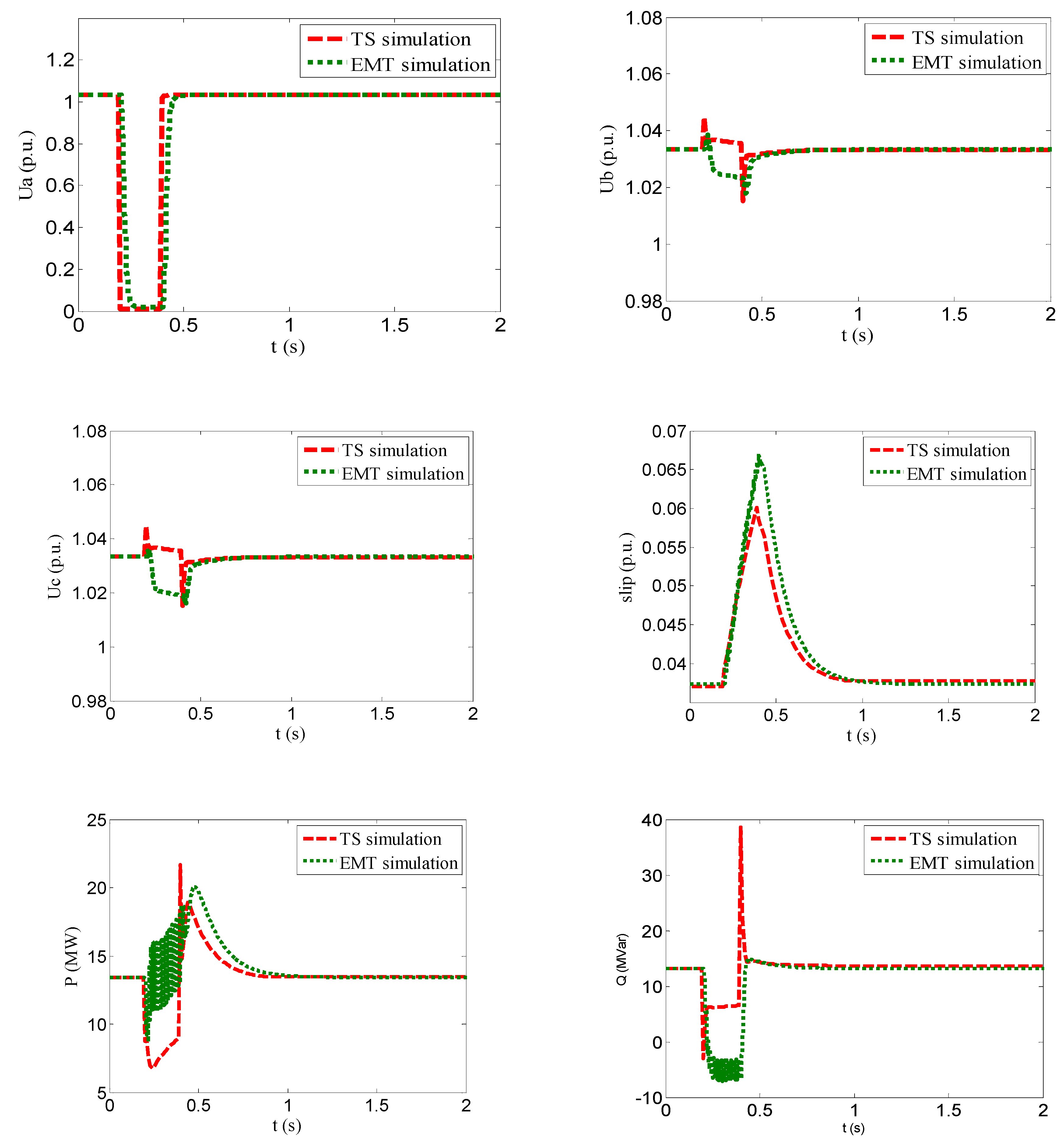
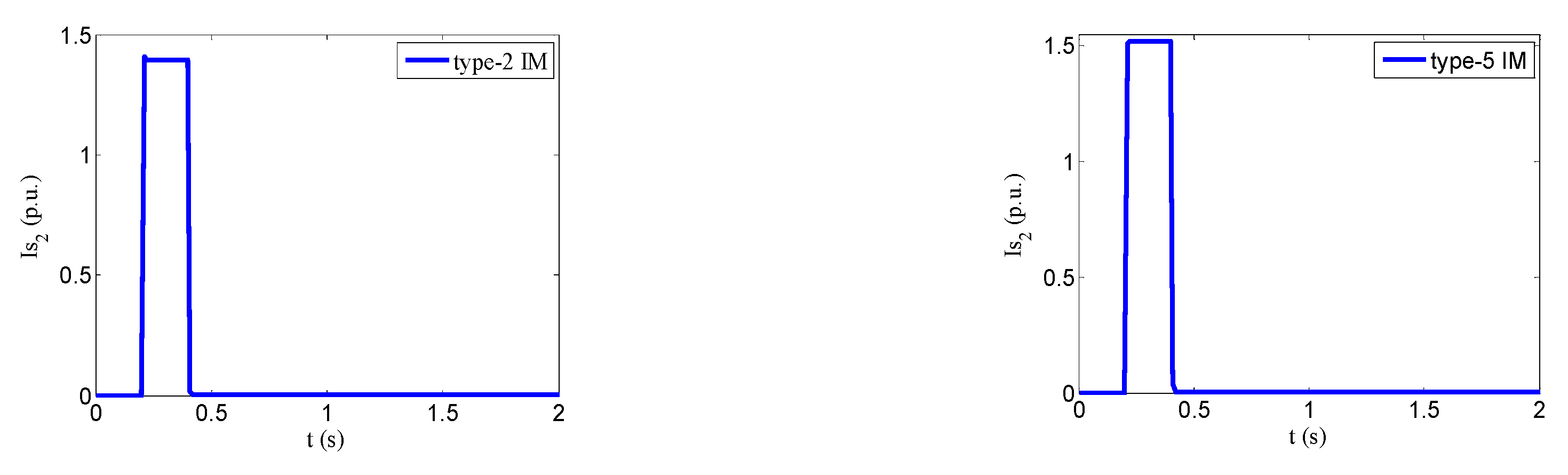
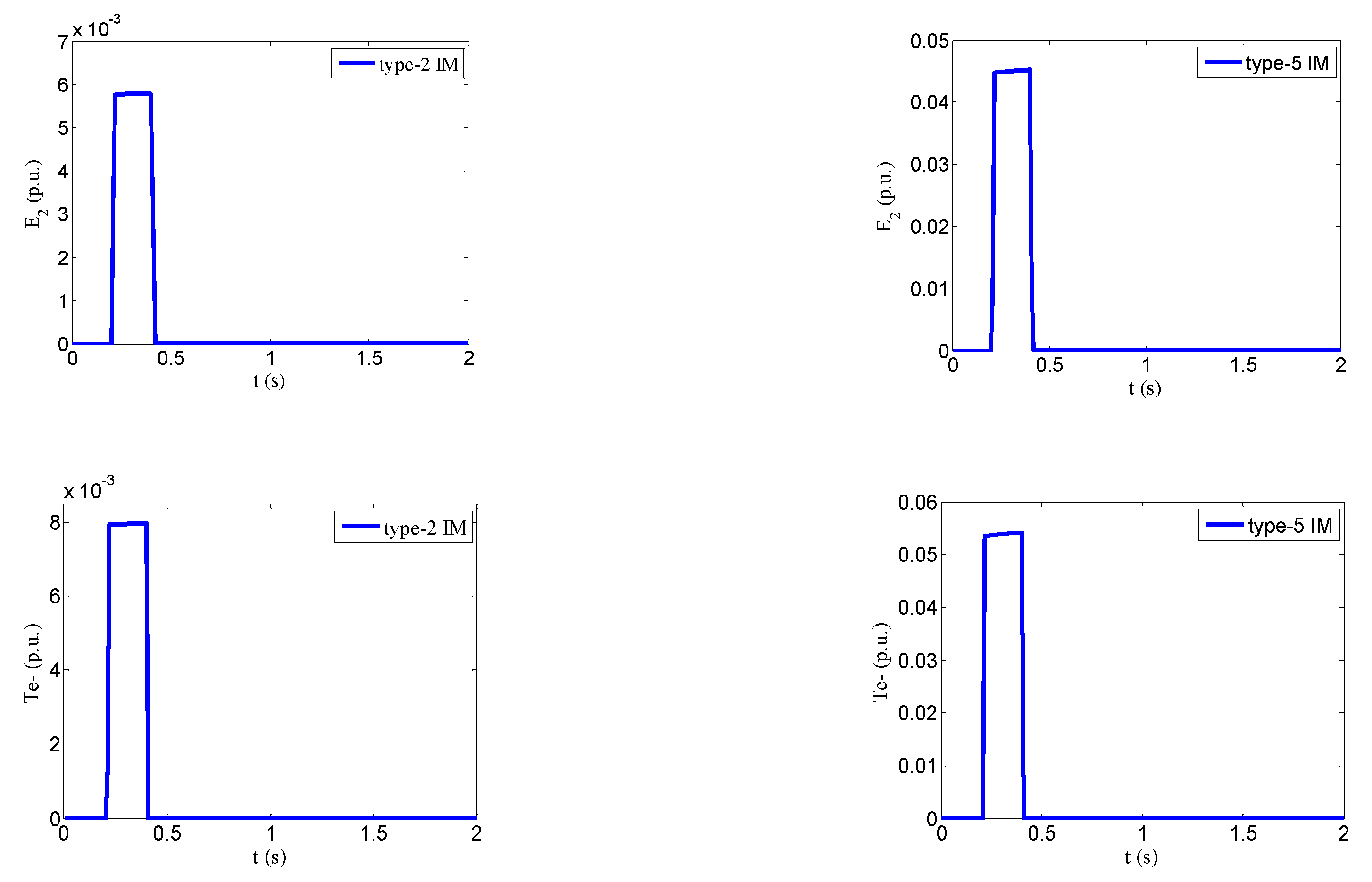
4.3. Verification and Discussion
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Larik, R.; Mustafa, M.W.; Aman, M.; Jumani, T.; Sajid, S.; Panjwani, M. An improved algorithm for optimal load shedding in power systems. Energies 2018, 11, 1808. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994; pp. 271–305. [Google Scholar]
- Modarresi, J.; Gholipour, E.; Khodabakhshian, A. A comprehensive review of the voltage stability indices. Renew. Sustain. Energy Rev. 2016, 63, 1–12. [Google Scholar] [CrossRef]
- Oluic, M.; Ghandhari, M.; Berggren, B. Methodology for rotor angle transient stability assessment in parameter space. IEEE Trans. Power Syst. 2017, 32, 1202–1211. [Google Scholar]
- Lin, Z.; Zhao, Y.; Liu, S.; Wen, F.; Ding, Y.; Yang, L.; Han, C.; Zhou, H.; Wu, H. A new indicator of transient stability for controlled islanding of power systems: Critical islanding time. Energies 2018, 11, 2975. [Google Scholar] [CrossRef]
- Chen, Z.; Han, X.; Fan, C.; Zheng, T.; Mei, S. A two-stage feature selection method for power system transient stability status prediction. Energies 2019, 12, 689. [Google Scholar] [CrossRef]
- Dai, W.; Yu, J.; Liu, X.; Li, W. Two-tier static equivalent method of active distribution networks considering sensitivity, power loss and static load characteristics. Int. J. Electr. Power Energy Syst. 2018, 100, 193–200. [Google Scholar] [CrossRef]
- Asres, M.W.; Girmay, A.A.; Camarda, C.; Tesfamariam, G.T. Non-intrusive load composition estimation from aggregate ZIP load models using machine learning. Int. J. Electr. Power Energy Syst. 2019, 105, 191–200. [Google Scholar] [CrossRef]
- Li, H.; Chen, Q.; Fu, C.; Yu, Z.; Shi, D.; Wang, Z. Bayesian estimation on load model coefficients of ZIP and induction motor model. Energies 2019, 12, 547. [Google Scholar] [CrossRef]
- Ge, H.; Guo, Q.; Sun, H.; Wang, B.; Zhang, B.; Wu, W. A load fluctuation characteristic index and its application to pilot node selection. Energies 2014, 7, 115–129. [Google Scholar] [CrossRef]
- Liu, J.; Xu, Y.; Dong, Z.Y.; Wong, K.P. Retirement-driven dynamic VAR planning for voltage stability enhancement of power systems with high-level wind power. IEEE Trans. Power Syst. 2018, 33, 2282–2291. [Google Scholar] [CrossRef]
- Guan, L.; Wu, L.; Li, F.; Zhao, Q. Heuristic planning for dynamic VAR compensation using zoning approach. IET Gener. Transm. Distrib. 2017, 11, 2852–2861. [Google Scholar] [CrossRef]
- Siemens, P.T.I. PSSE User’s Manual; Version 33.4; Siemens Industry, Inc. Siemens Power Technologies International: Schenectady, NY, USA, 2013. [Google Scholar]
- Tools, D.S.A. TSAT Model Manual; Version 8.0; Powertech Labs Inc.: Surrey, BC, Canada, 2011. [Google Scholar]
- Tang, Y.; Bo, G.Q.; Hou, J.X. PSD-BPA Transient Stability Program User Manual; Chinese Version 4.15; China Electric Power Science Research Institute: Beijing, China, 2007. [Google Scholar]
- Pedra, J.; Candela, I.; Sainz, L. Modelling of squirrel-cage induction motors for electromagnetic transient programs. IET Electr. Power Appl. 2009, 3, 111–122. [Google Scholar] [CrossRef]
- Al-Jufout, S.A. Modeling of the cage induction motor for symmetrical and asymmetrical modes of operation. Comput. Electr. Eng. 2003, 29, 851–860. [Google Scholar] [CrossRef]
- Ikeda, M.; Hiyama, T. Simulation studies of the transients of squirrel-cage induction motors. IEEE Trans. Energy Convers. 2007, 22, 233–239. [Google Scholar] [CrossRef]
- Su, H.T.; Chan, K.W.; Snider, L.A. Parallel interaction protocol for electromagnetic and electromechanical hybrid simulation. IEE Proc. Gener. Transm. Distrib. 2005, 152, 406–414. [Google Scholar] [CrossRef]
- Van der Meer, A.A.; Gibescu, M.; van der Meijden, M.A.; Kling, W.L.; Ferreira, J.A. Advanced Hybrid Transient Stability and EMT Simulation for VSC-HVDC Systems. IEEE Trans. Power Deliver. 2015, 30, 1057–1066. [Google Scholar] [CrossRef]
- Ahmed-Zaid, S.; Taleb, M. Structural modeling of small and large induction machines using integral manifolds. IEEE Trans. Energy Convers. 1991, 6, 529–535. [Google Scholar] [CrossRef]
- Martín, H.; de la Hoz, J.; Monjo, L.; Pedra, J. Study of Reduced-order Models of Squirrel-cage Induction Motors. Electr. Power Compon. Syst. 2011, 39, 1542–1562. [Google Scholar] [CrossRef]
- Thiringer, T.; Luomi, J. Comparison of reduced-order dynamic models of induction machines. IEEE Trans. Power Syst. 2001, 16, 119–126. [Google Scholar] [CrossRef]
- Borghetti, A.; Caldon, R.; Mari, A.; Nucci, C.A. On dynamic load models for voltage stability studies. IEEE Trans. Power Syst. 1997, 12, 293–303. [Google Scholar] [CrossRef]
- Balanathan, R.; Pahalawaththa, N.C.; Annakkage, U.D. Modelling induction motor loads for voltage stability analysis. Int. J. Electr. Power Energy Syst. 2002, 24, 469–480. [Google Scholar] [CrossRef]
- Lem TY, J.; Alden RT, H. Comparison of experimental and aggregate induction motor responses. IEEE Trans. Power Syst. 1994, 9, 1895–1900. [Google Scholar] [CrossRef]
- Price, W.W.; Taylor, C.W.; Rogers, G.J. IEEE Task Force on Load Representation for Dynamic Performance, Standard load models for power flow and dynamic performance simulation. IEEE Trans. Power Syst. 1995, 10, 1302–1313. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Rs (p.u.) | Xs (p.u.) | Rr (p.u.) | Xr (p.u.) | Xm (p.u.) | H (s) | A |
|---|---|---|---|---|---|---|---|
| 2 | 0.013 | 0.067 | 0.009 | 0.170 | 3.80 | 1.5 | 0.8 |
| 5 | 0.077 | 0.107 | 0.079 | 0.098 | 2.22 | 0.74 | 0.46 |
| 7 | 0.064 | 0.091 | 0.059 | 0.071 | 2.23 | 0.34 | 0.8 |
| IM Type | Type-1 | Type-2 | Type-3 | Type-4 | Type-5 | Type-6 | Type-7 |
|---|---|---|---|---|---|---|---|
| R | 0.0295 | 0.0179 | 0.016 | 0.016 | 0.1567 | 0.0842 | 0.1501 |
| T0′ | 0.5977 | 1.4041 | 0.8913 | 0.8913 | 0.0934 | 0.1965 | 0.1241 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, X.; Chen, J. A Fast Method to Compute the Dynamic Response of Induction Motor Loads Considering the Negative-Sequence Components in Stability Studies. Energies 2019, 12, 1802. https://doi.org/10.3390/en12091802
Mao X, Chen J. A Fast Method to Compute the Dynamic Response of Induction Motor Loads Considering the Negative-Sequence Components in Stability Studies. Energies. 2019; 12(9):1802. https://doi.org/10.3390/en12091802
Chicago/Turabian StyleMao, Xiaoming, and Junxian Chen. 2019. "A Fast Method to Compute the Dynamic Response of Induction Motor Loads Considering the Negative-Sequence Components in Stability Studies" Energies 12, no. 9: 1802. https://doi.org/10.3390/en12091802