Improvements of the Starting Performance of A Novel Brushless Doubly-fed Motor Based on the Composite Coils

Abstract
:1. Introduction
2. The Principle of Composite Coils
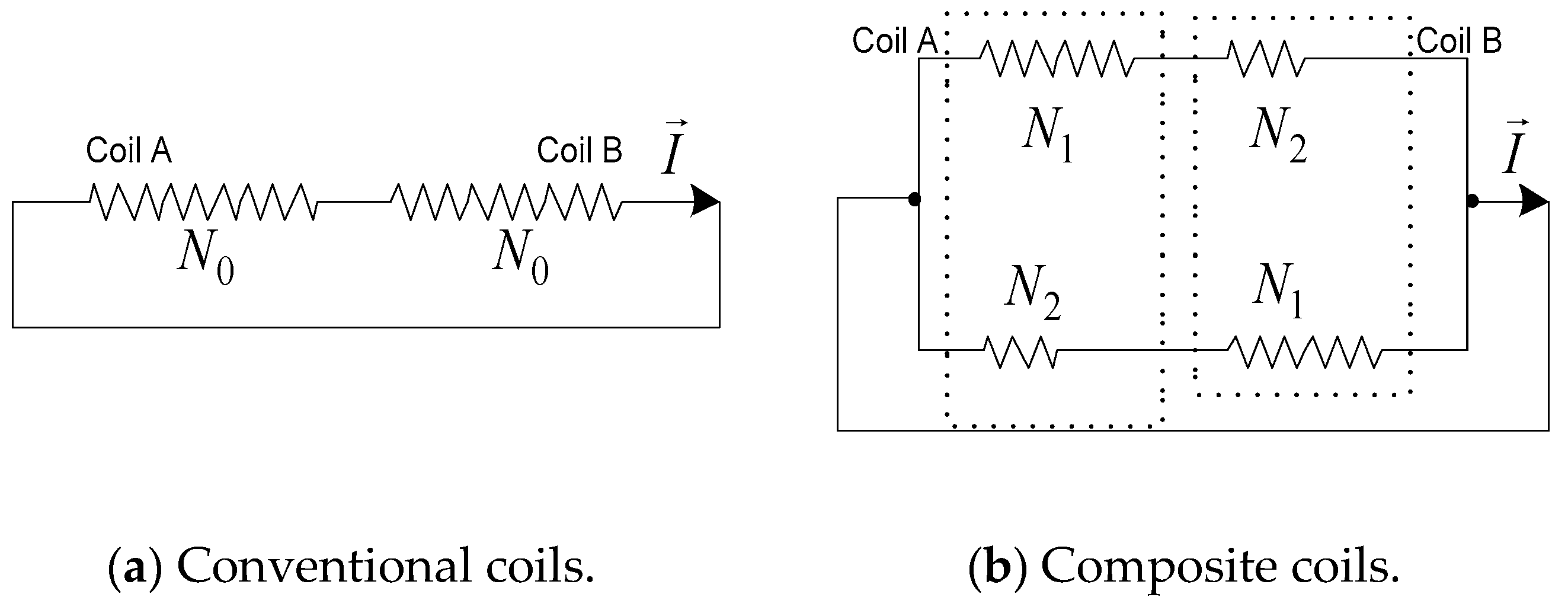
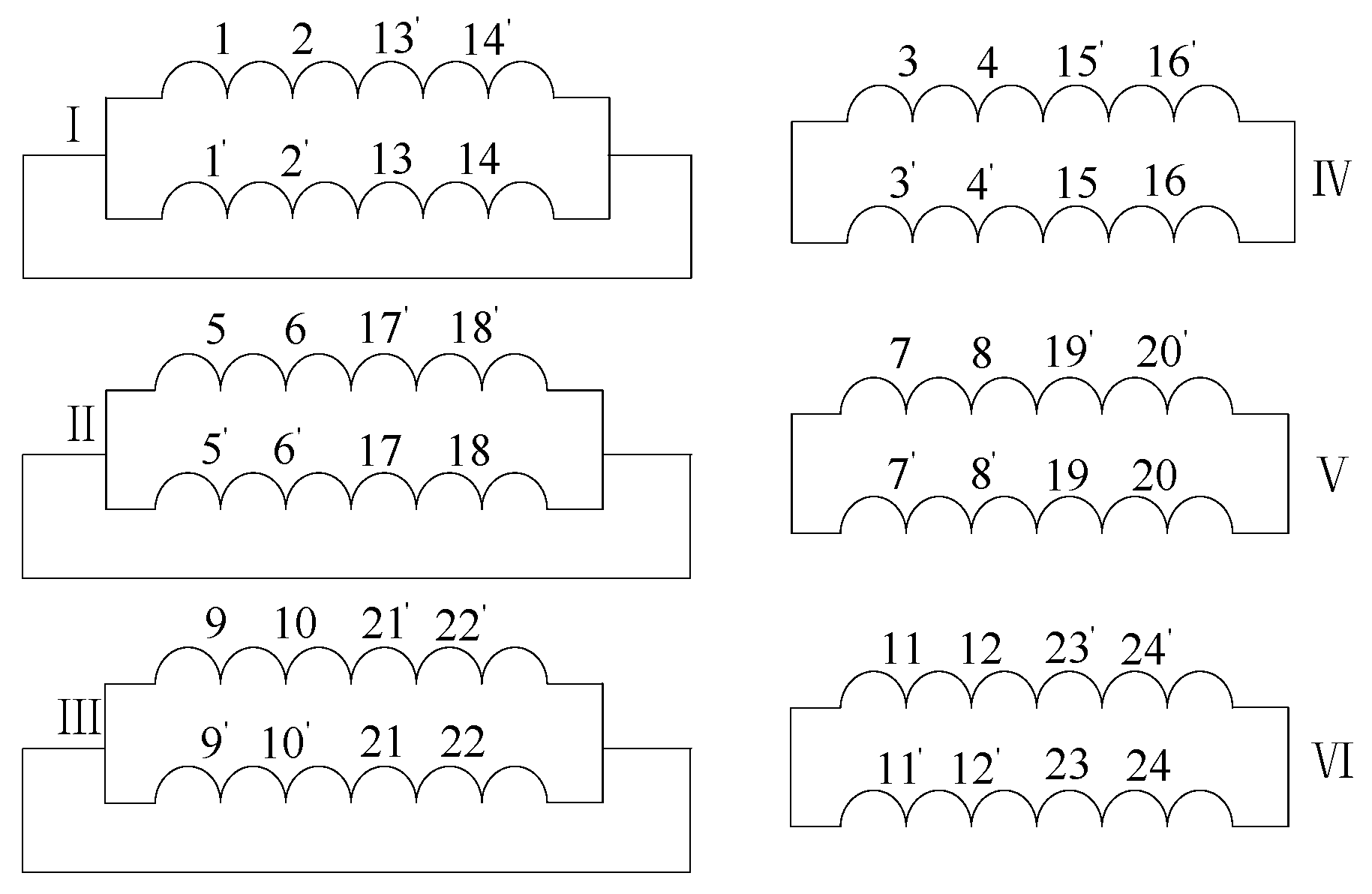
2.1. The Structure of Composite Coils
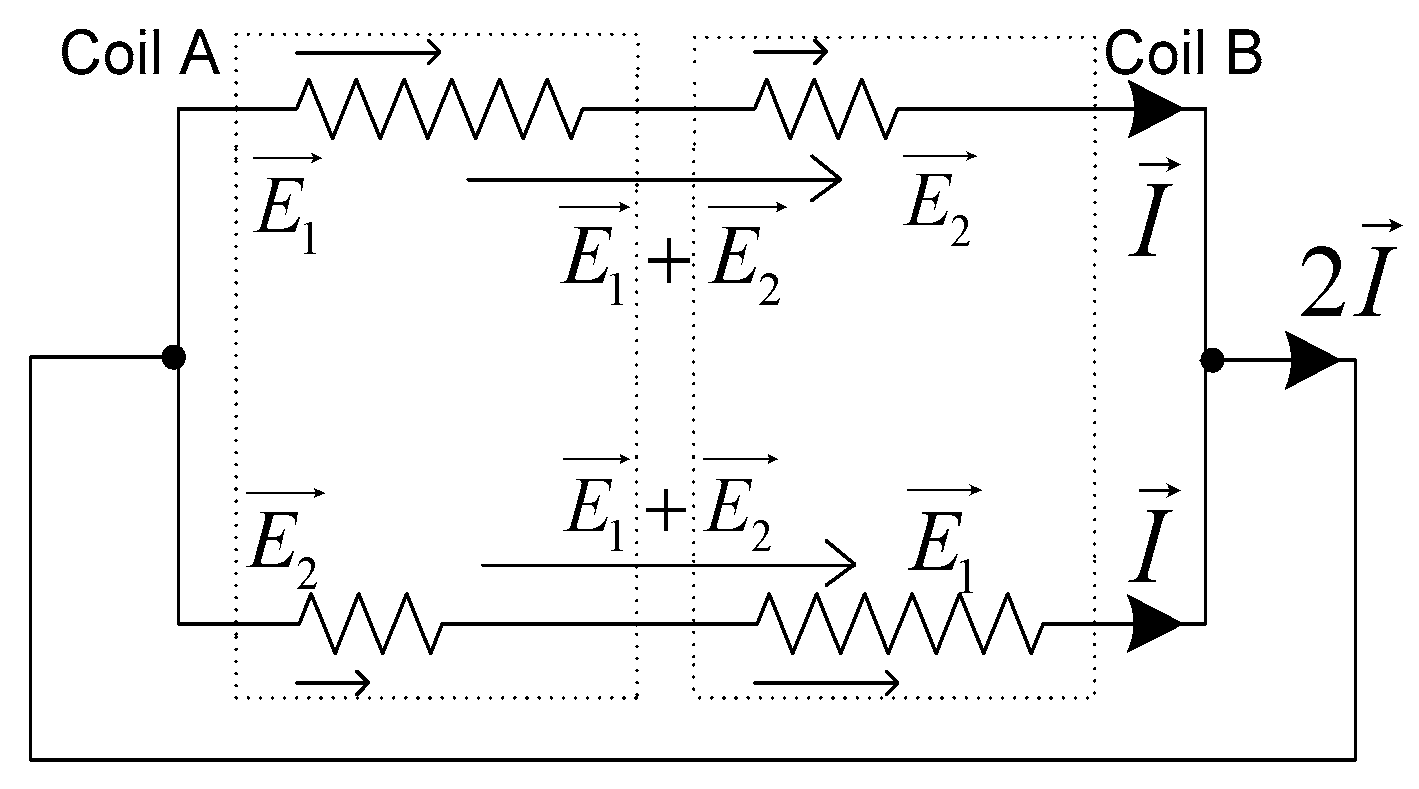
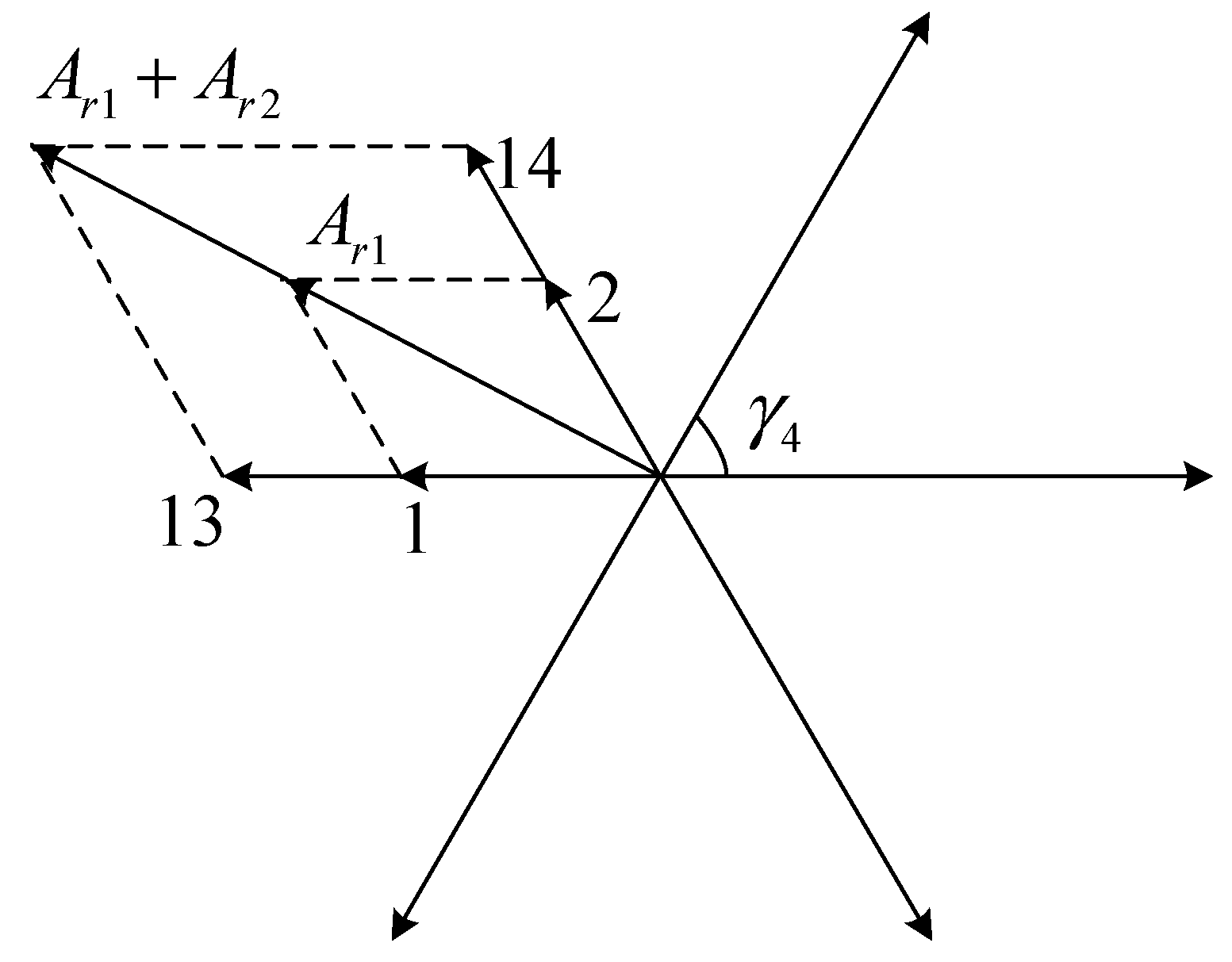
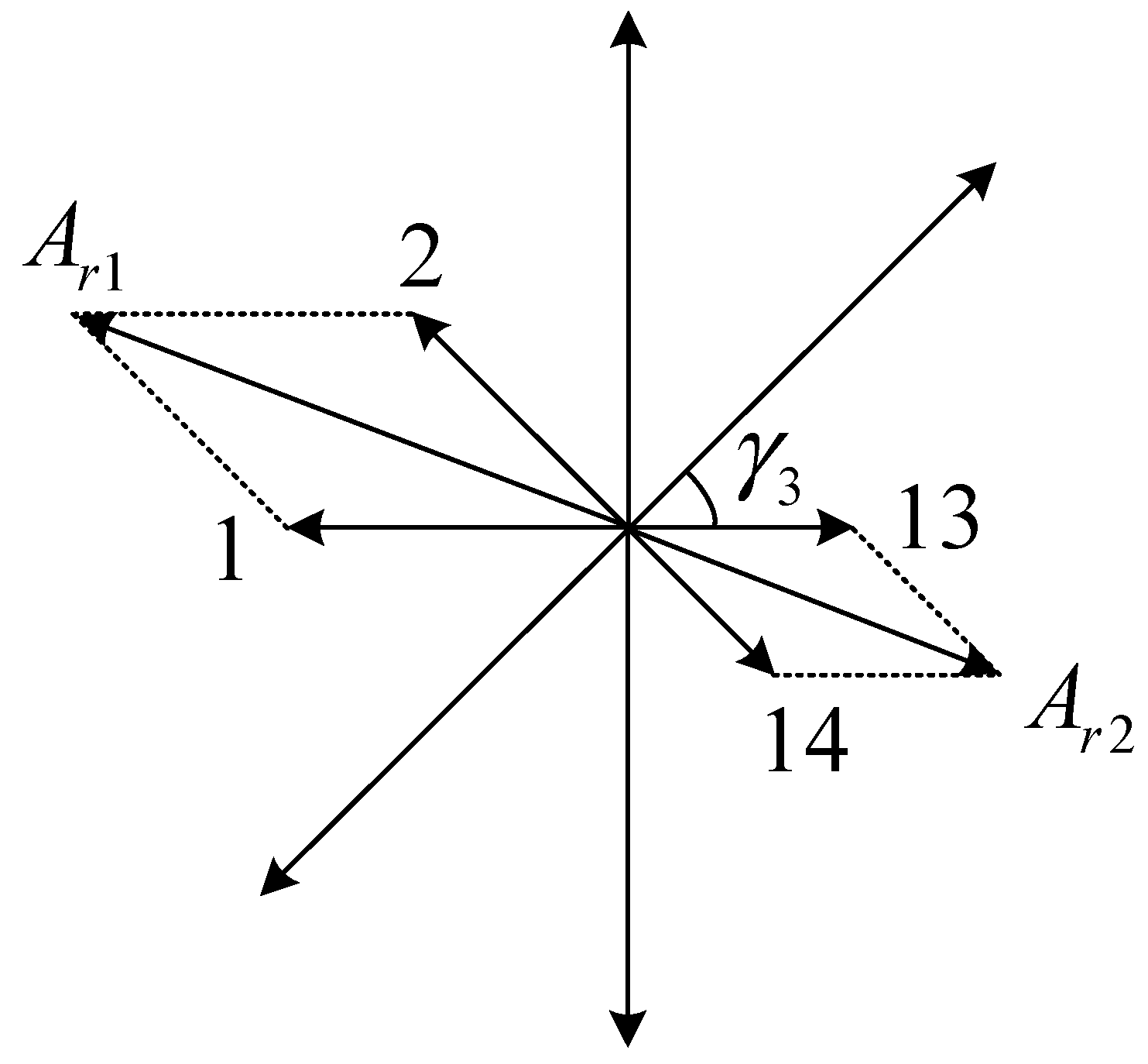
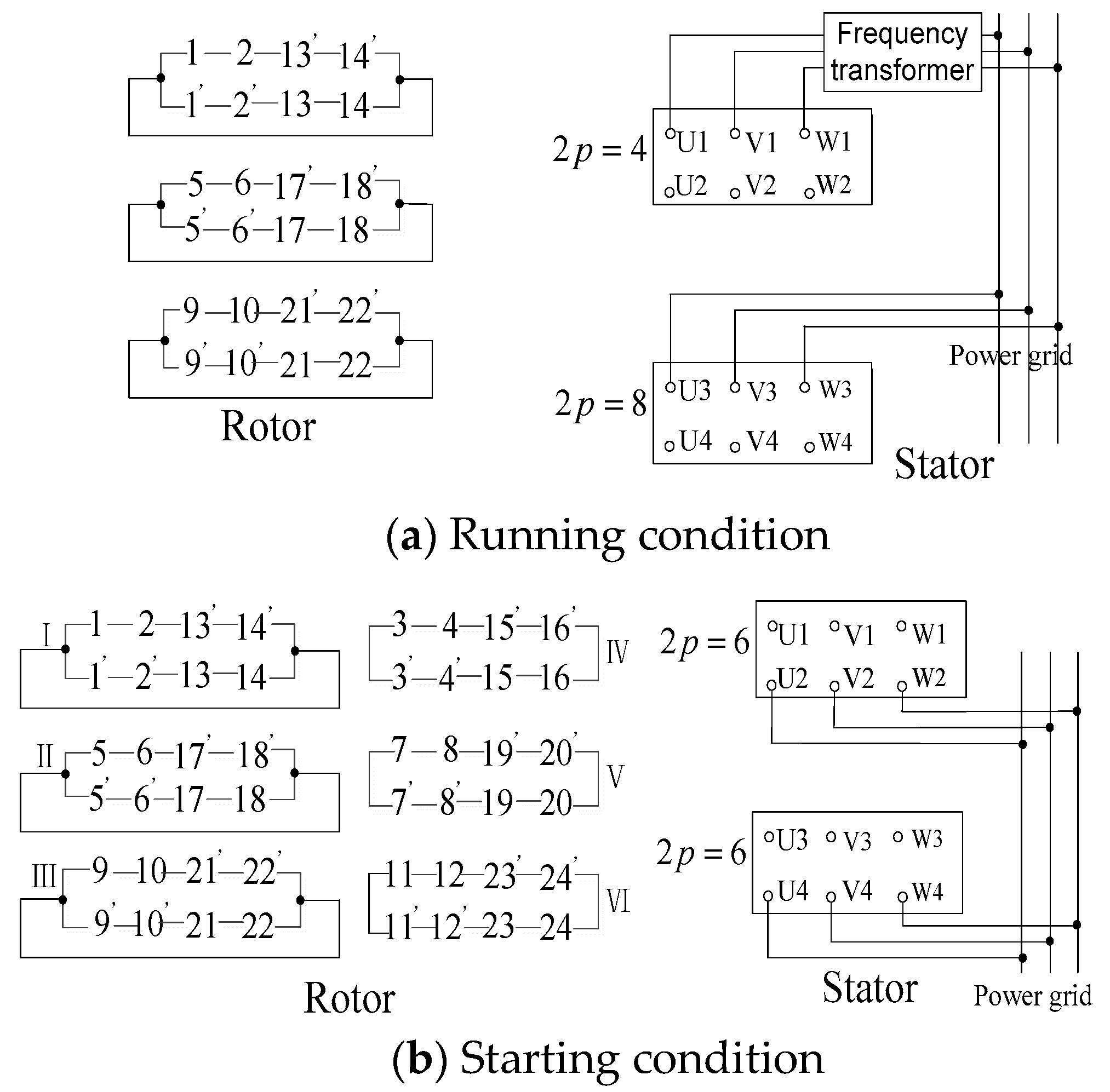
2.2. The Running Condition of Composite Coils
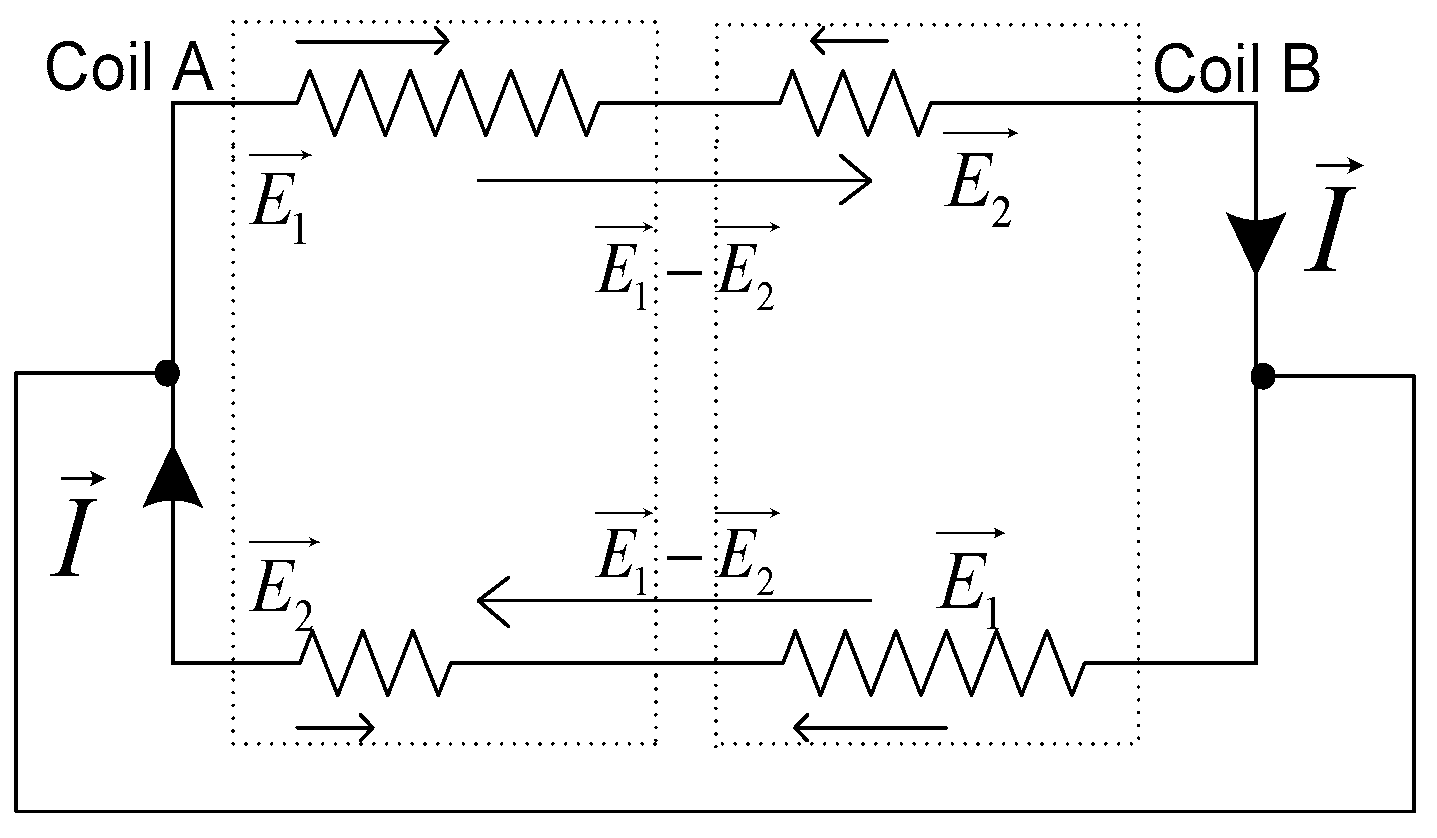
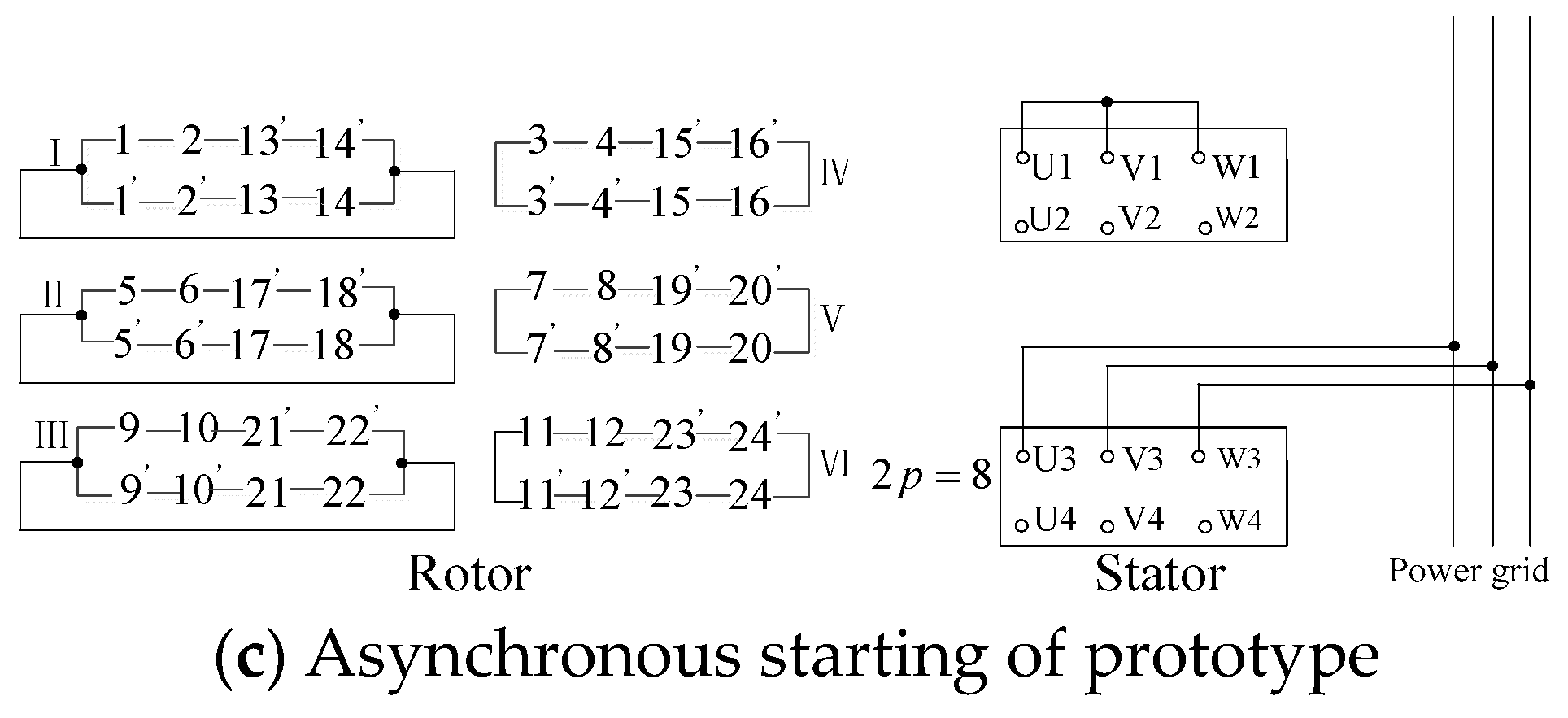
2.3. The Starting Condition of Composite Coils
3. Winding Design Example
3.1. Rotor Winding Design
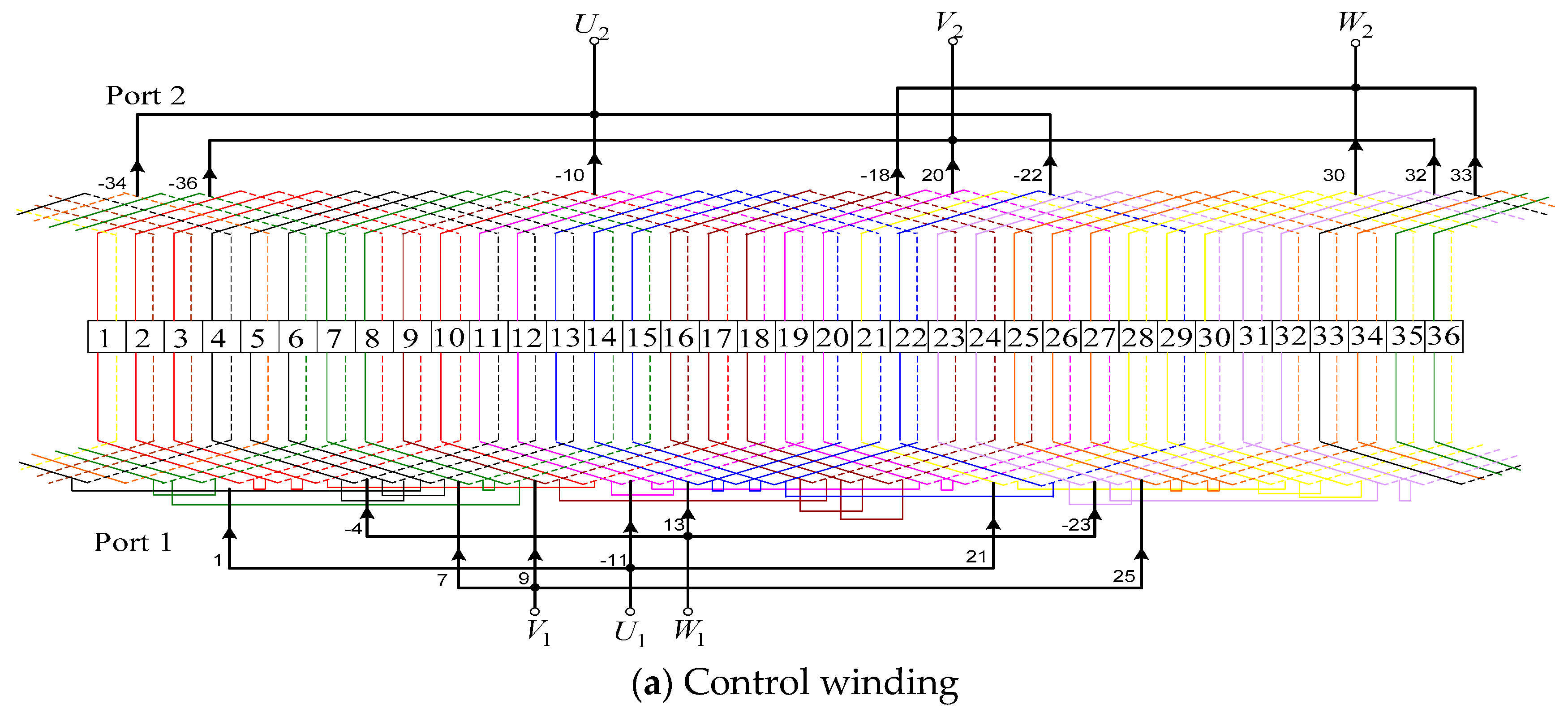
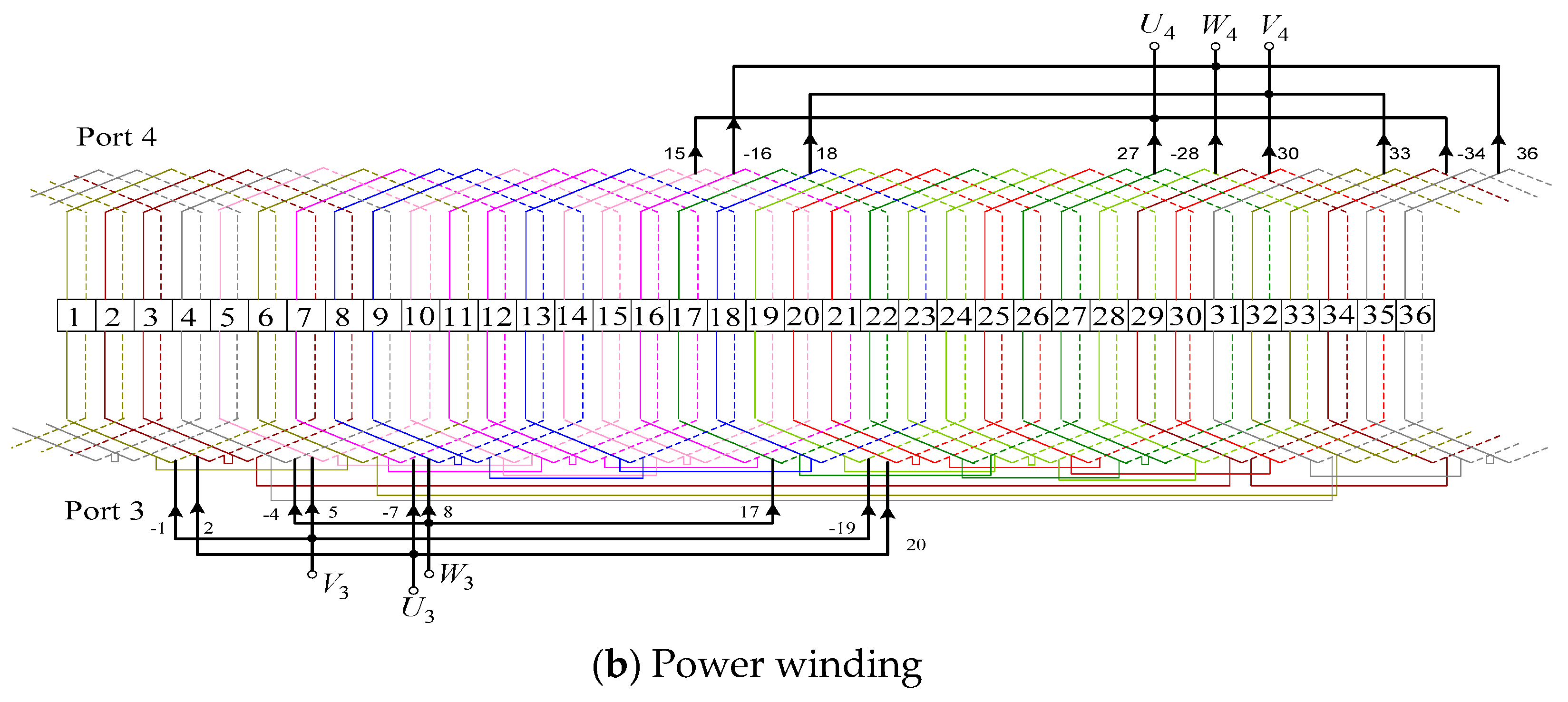
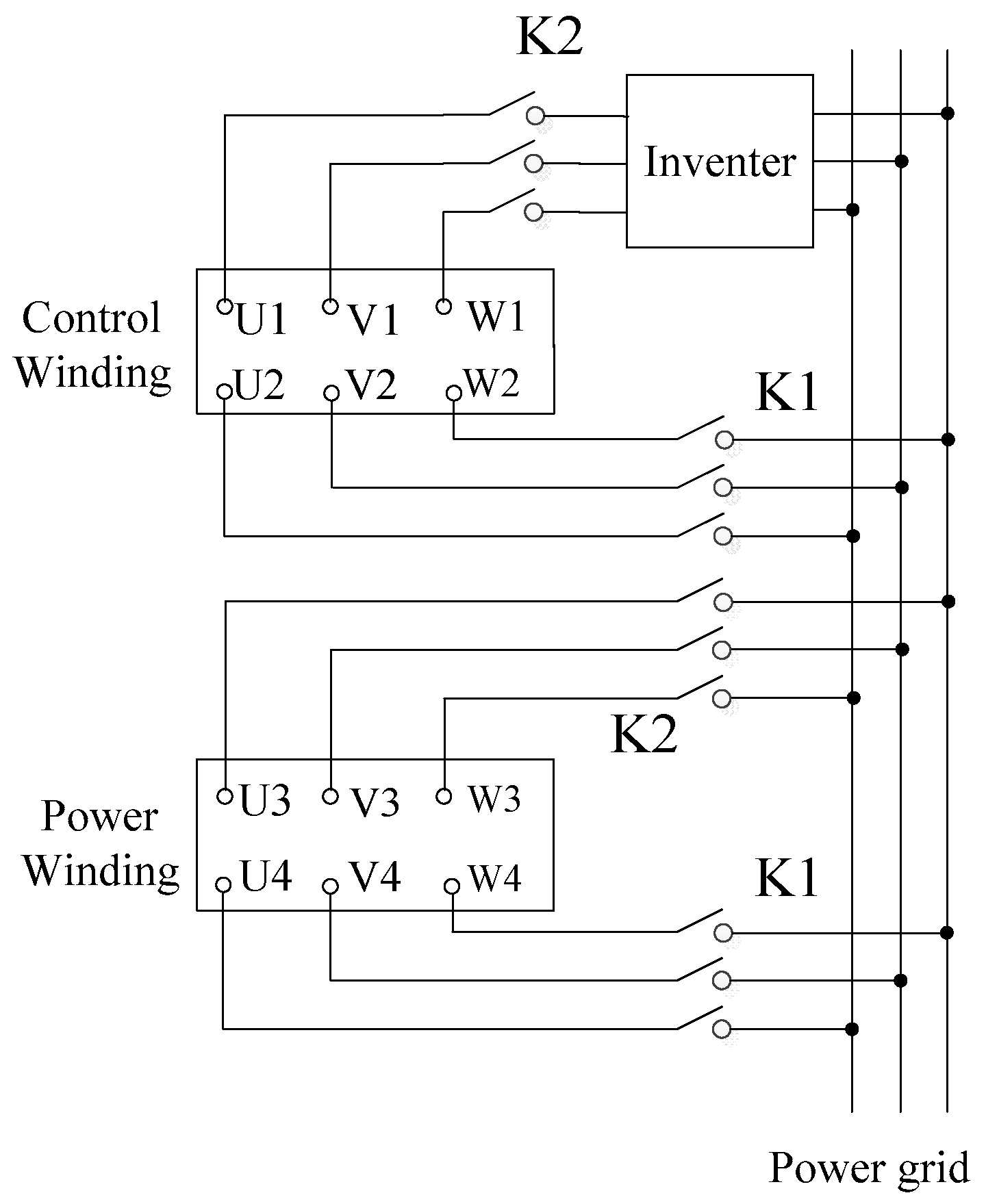
3.2. Stator Winding Design
4. Simulation and Experimental Research
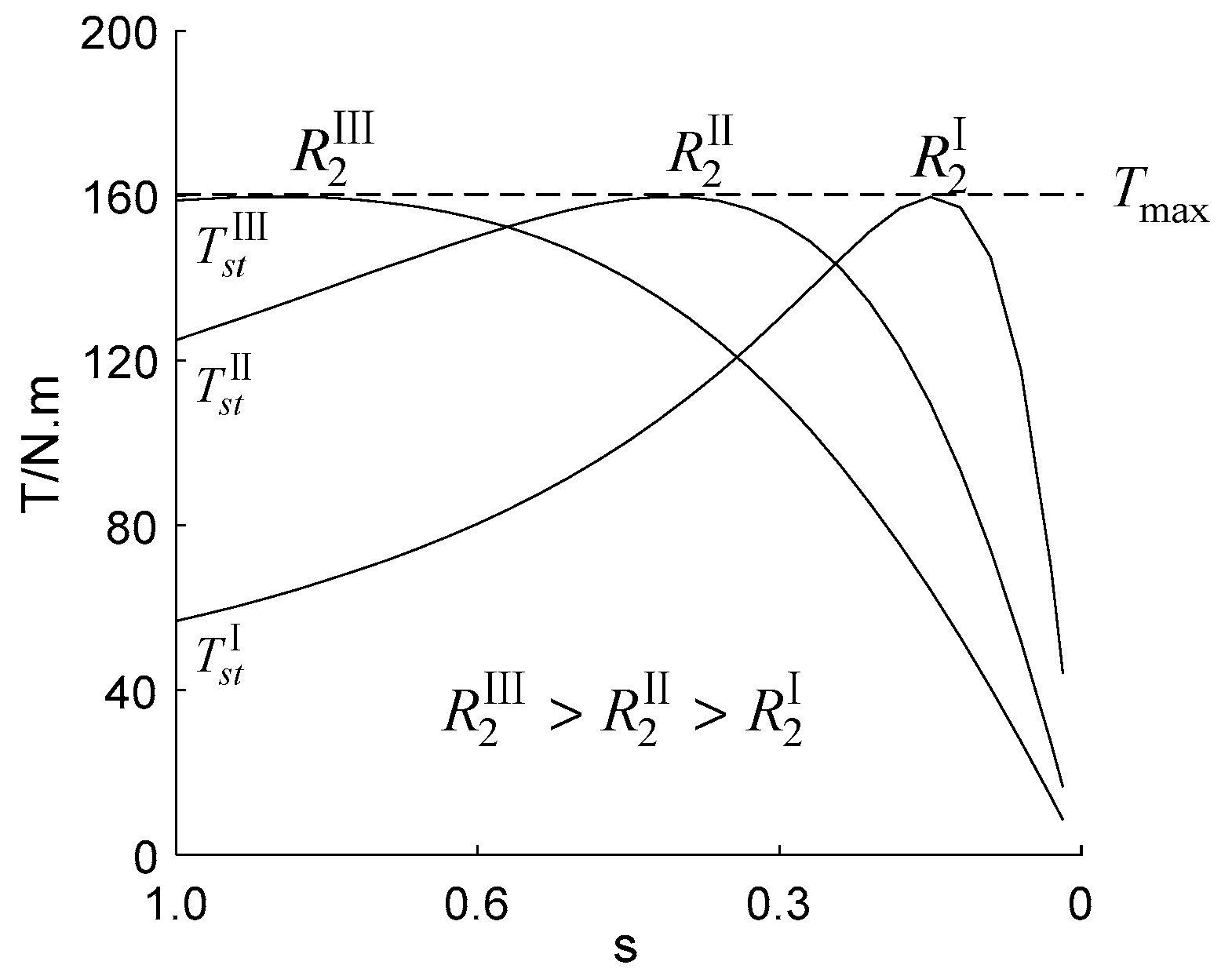
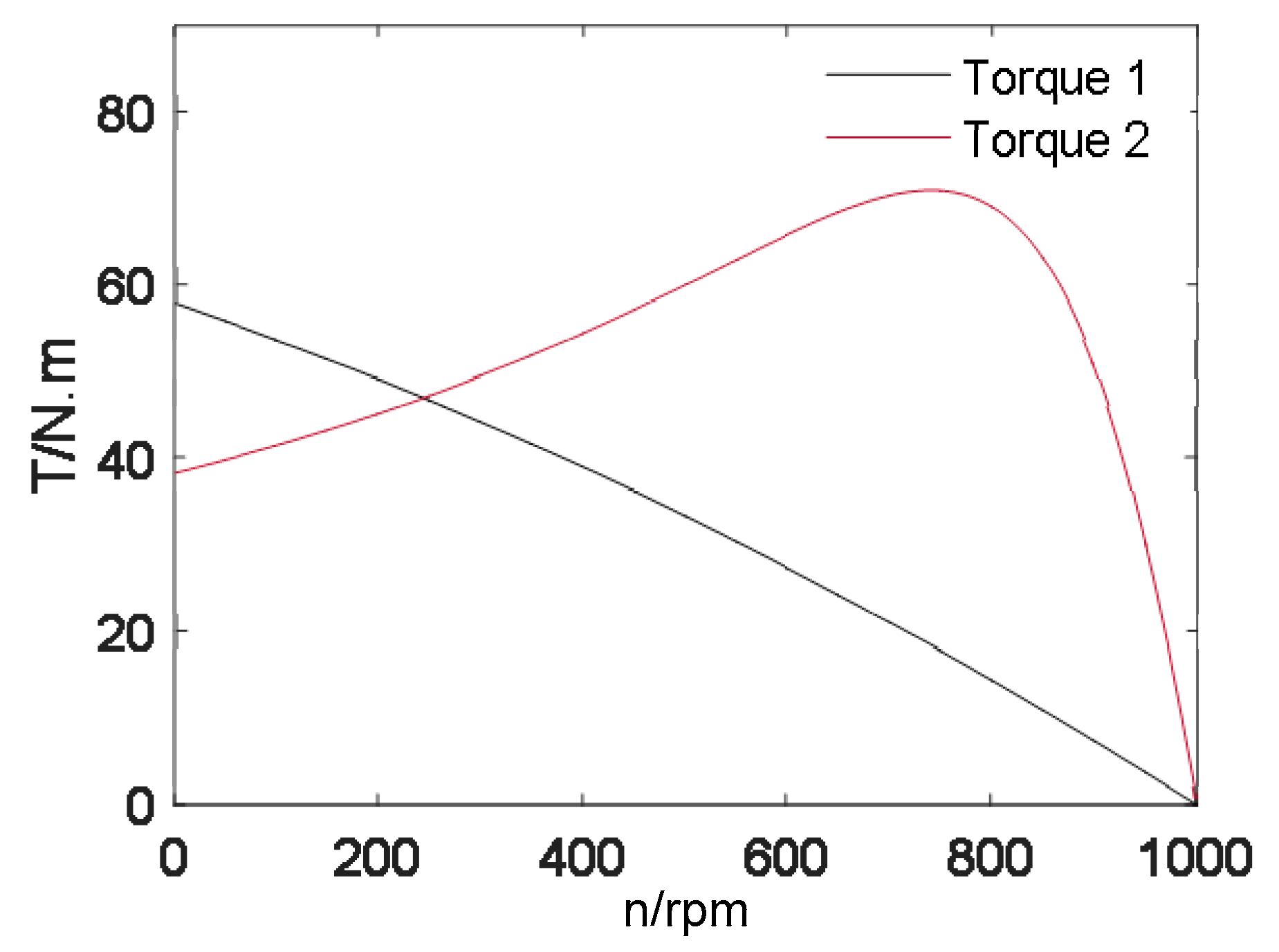
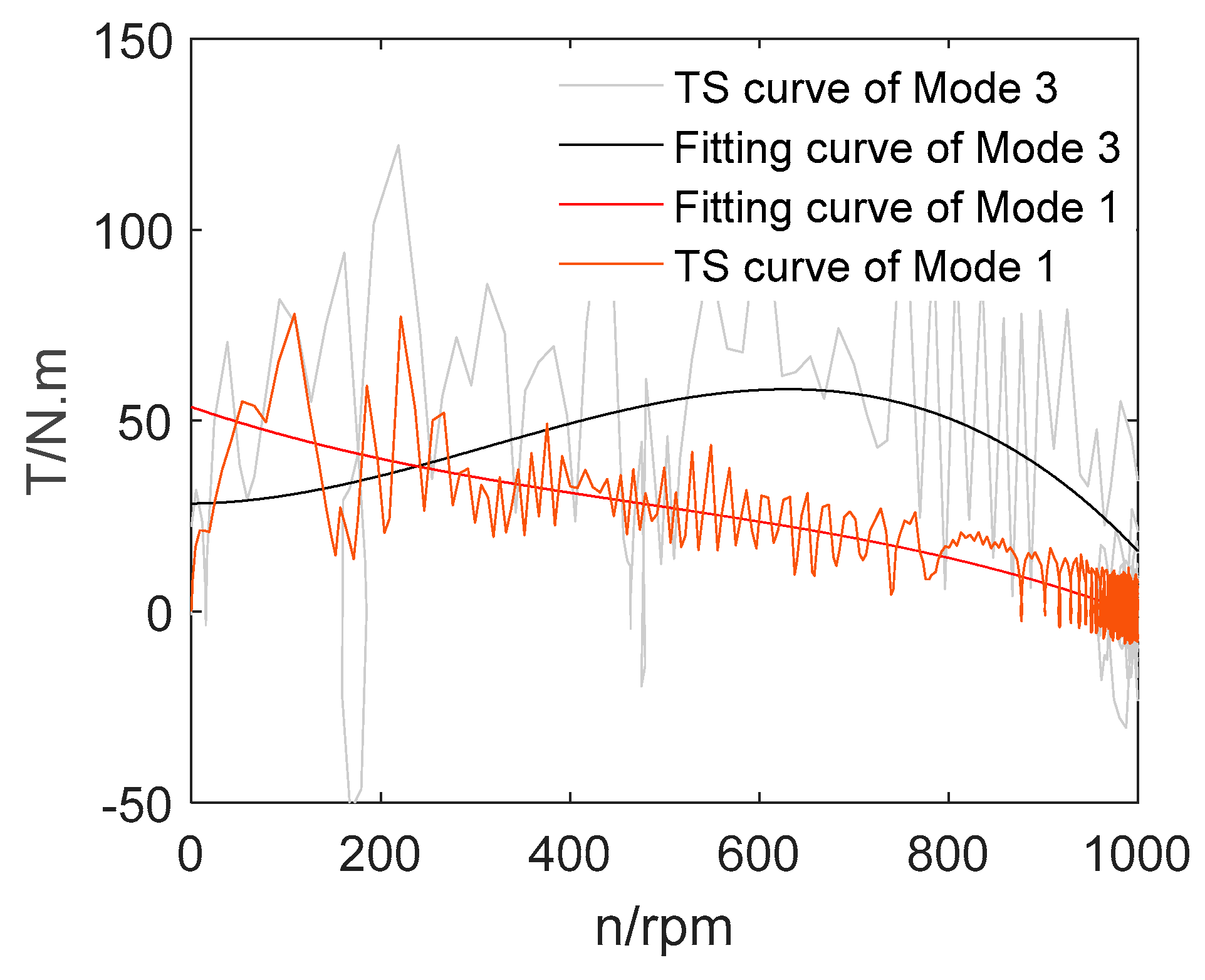
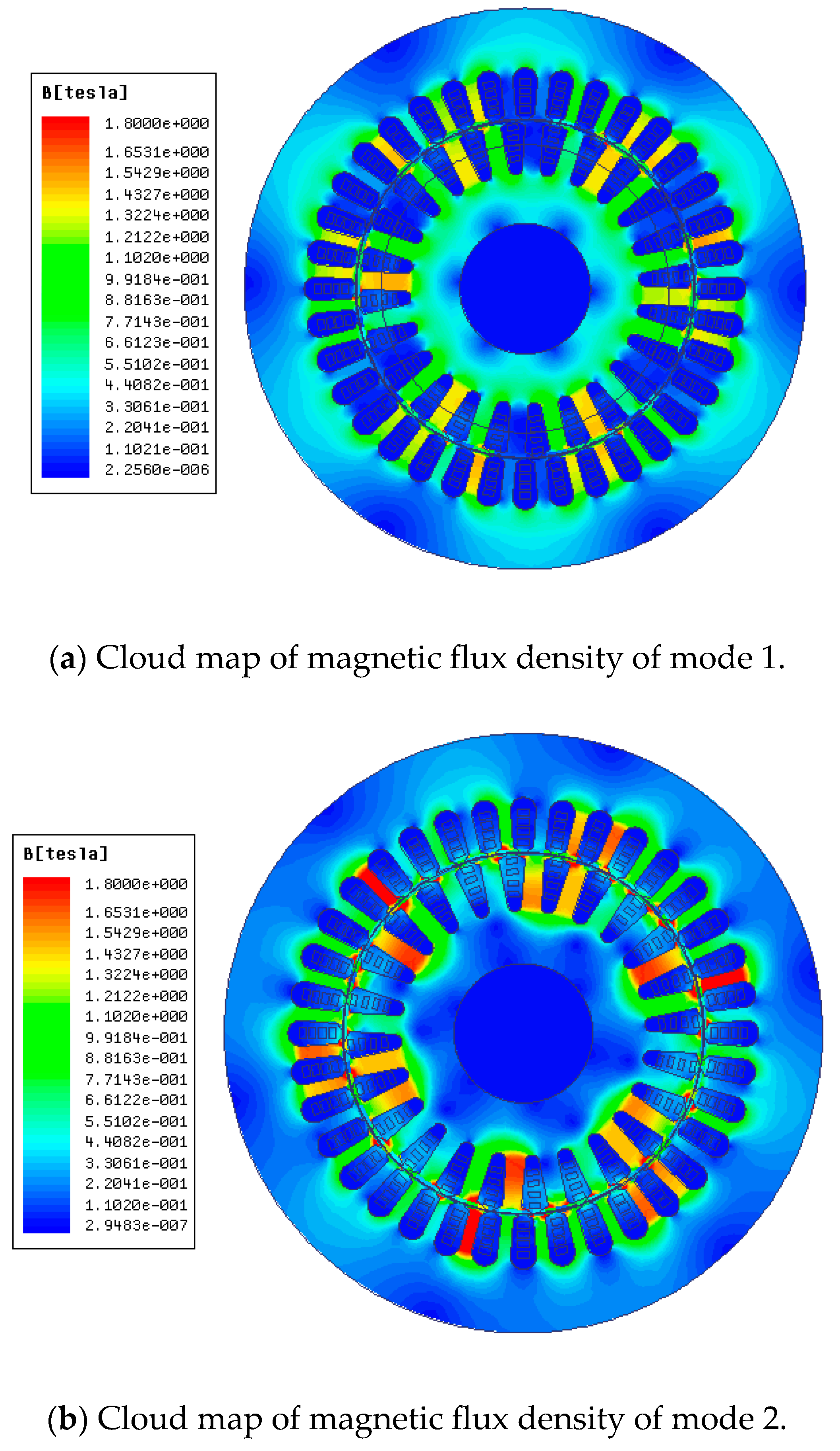
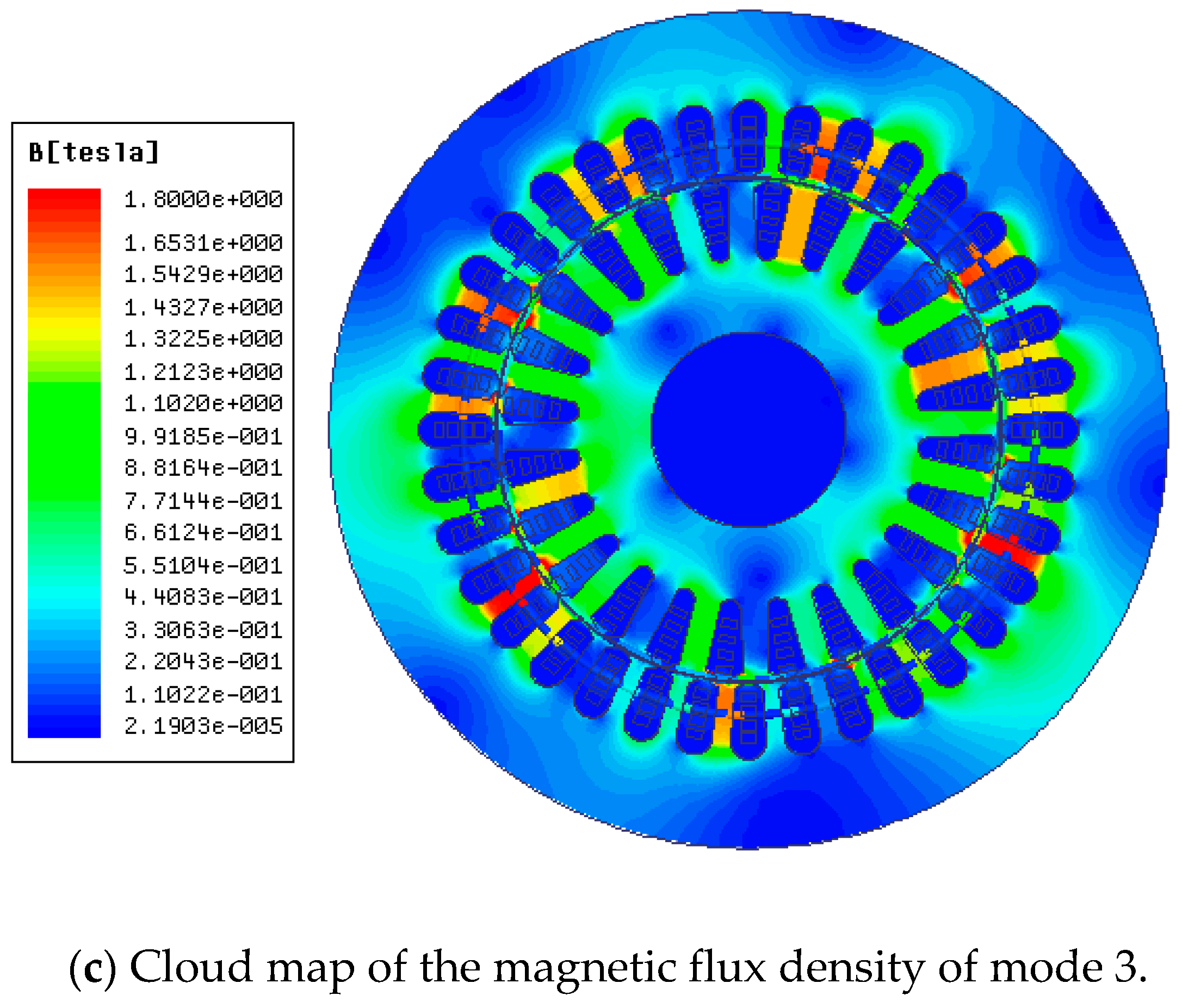
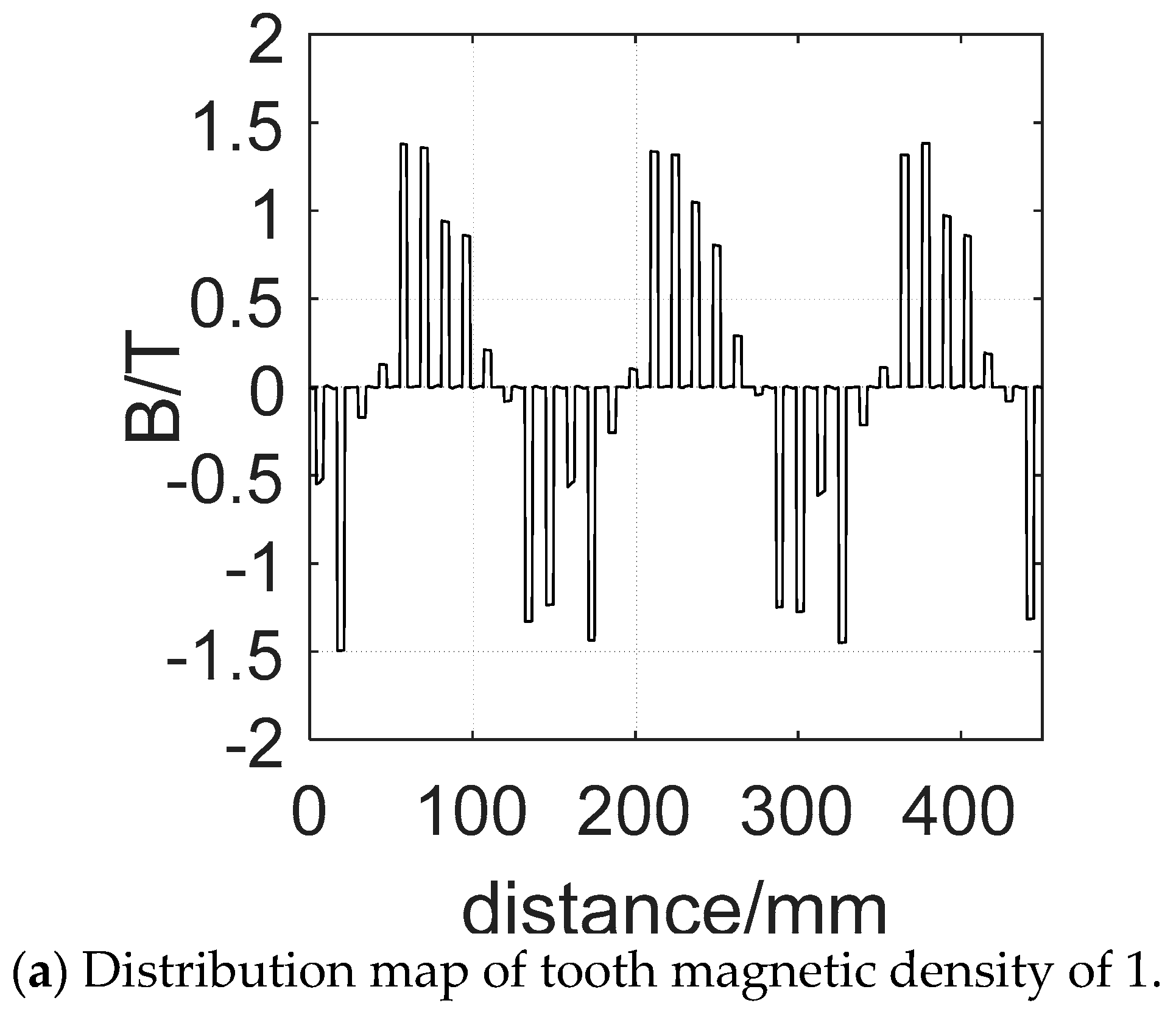
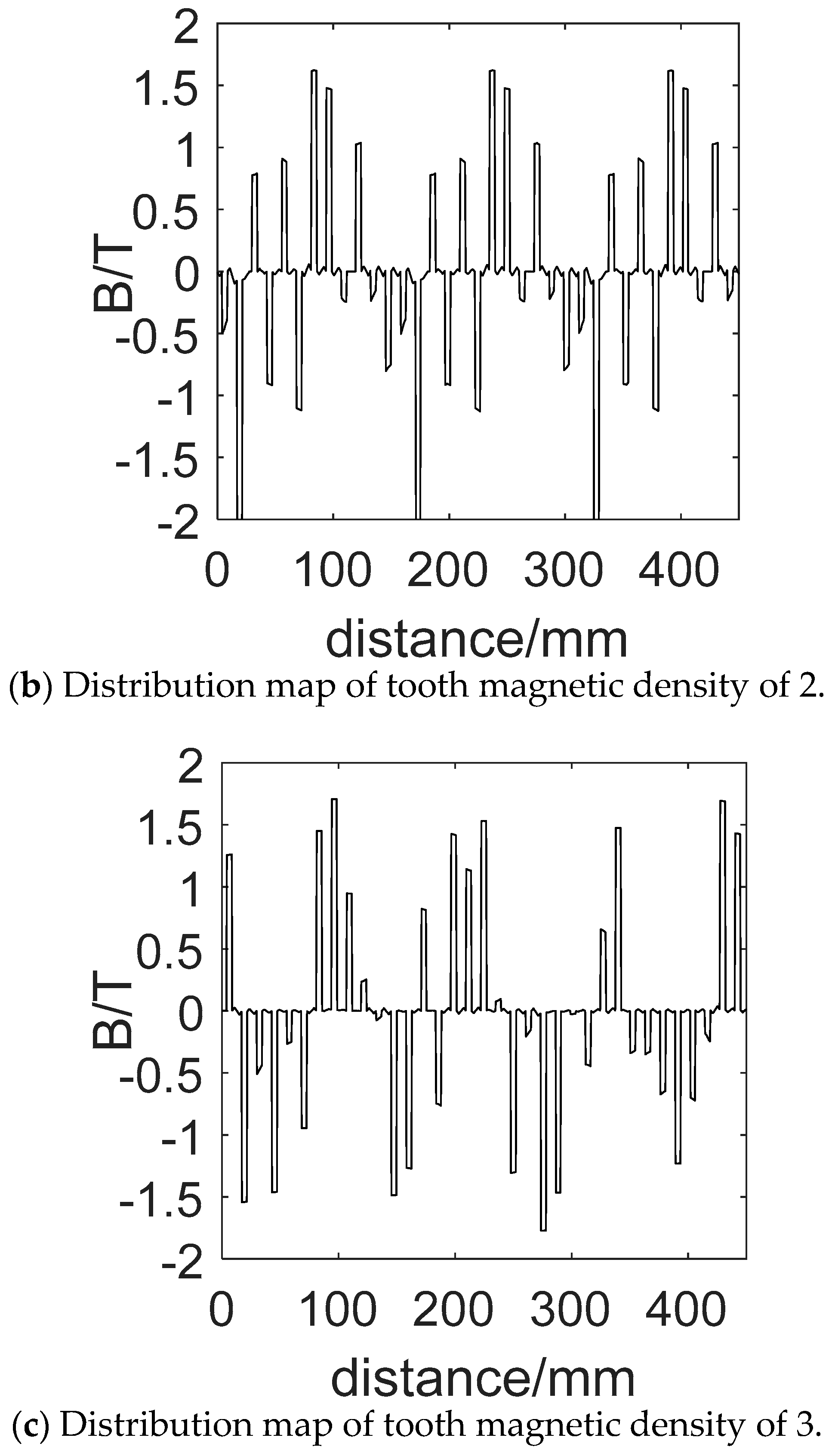
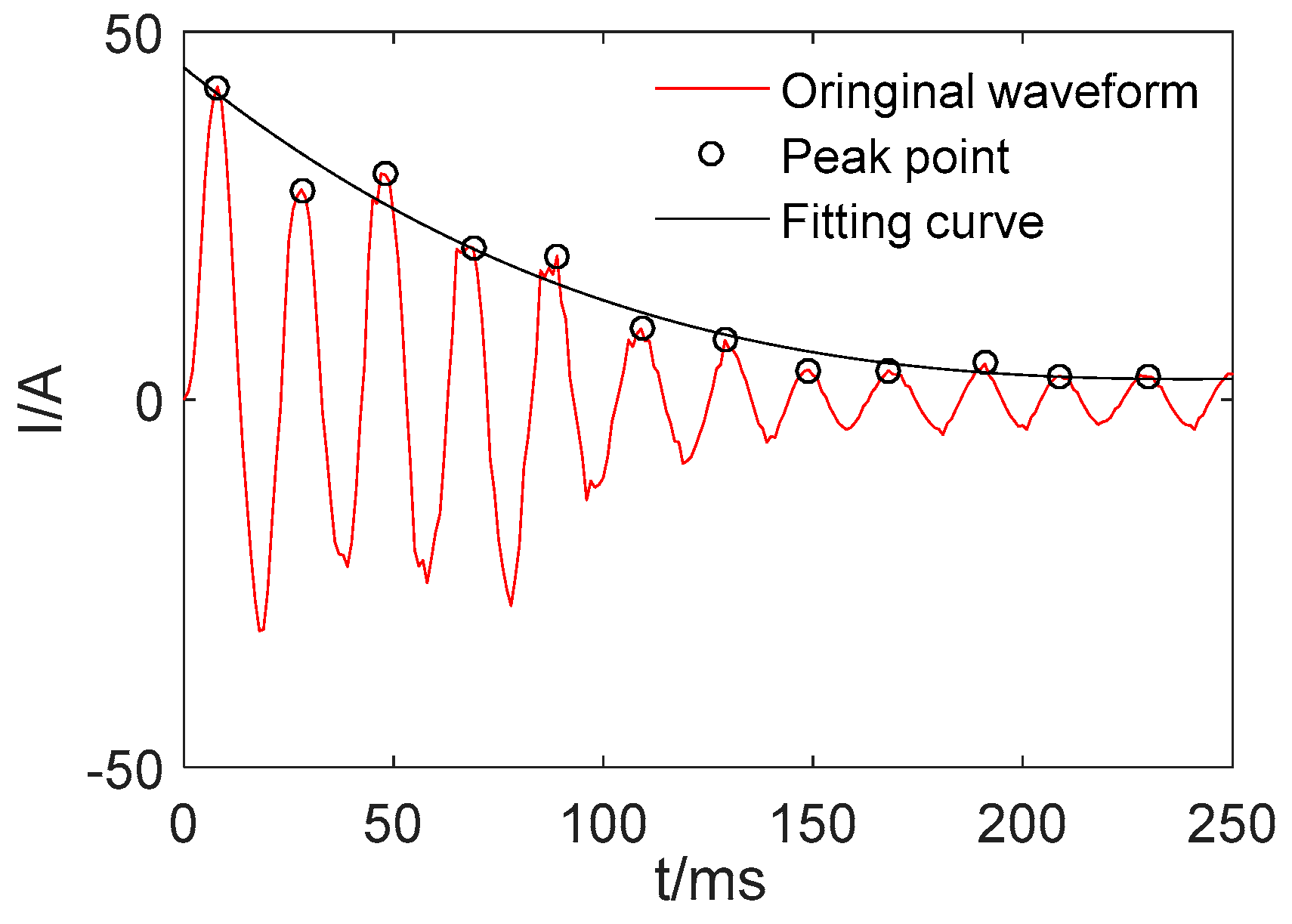
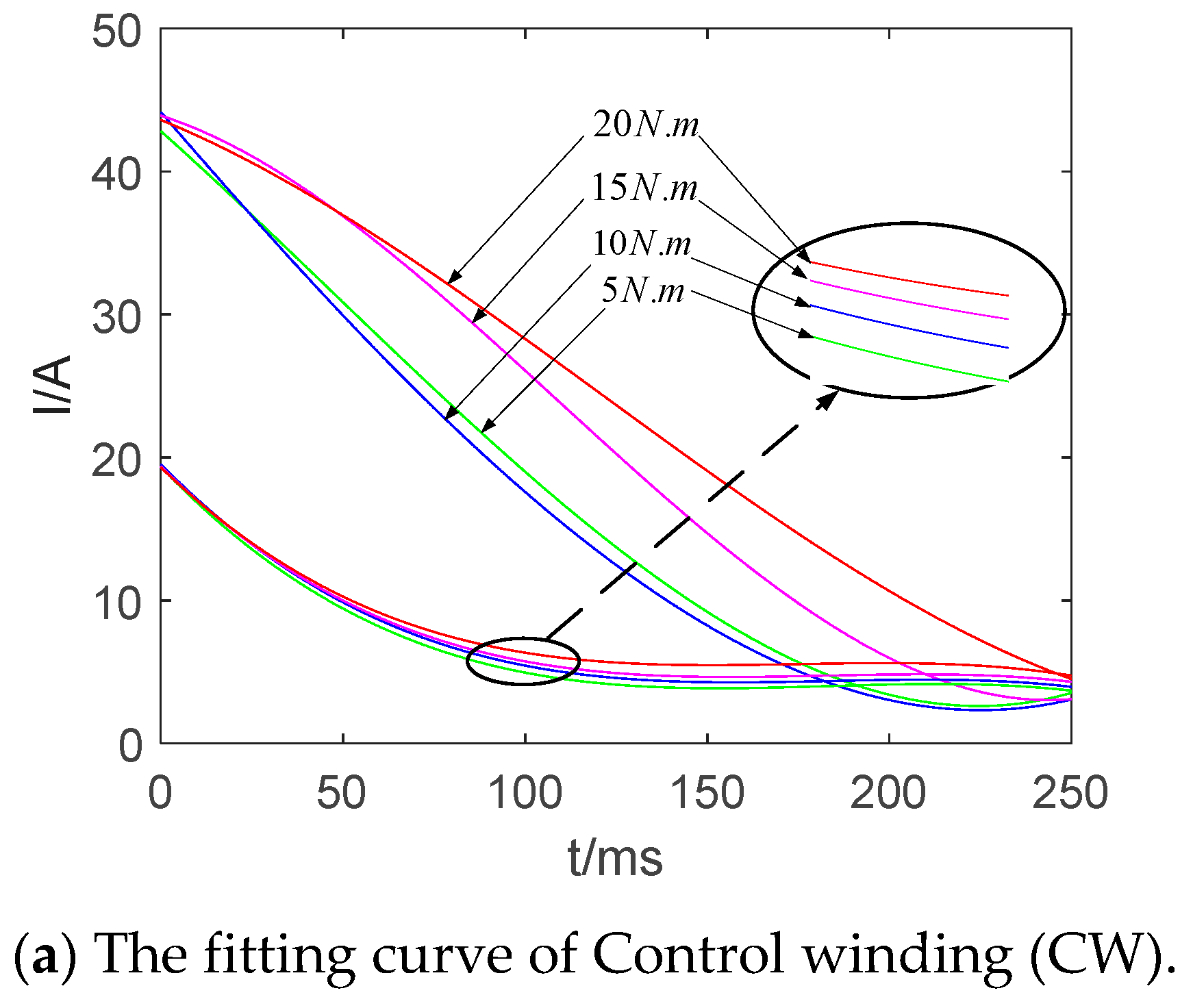
4.1. Effect of Composite Coil Set on Starting Torque
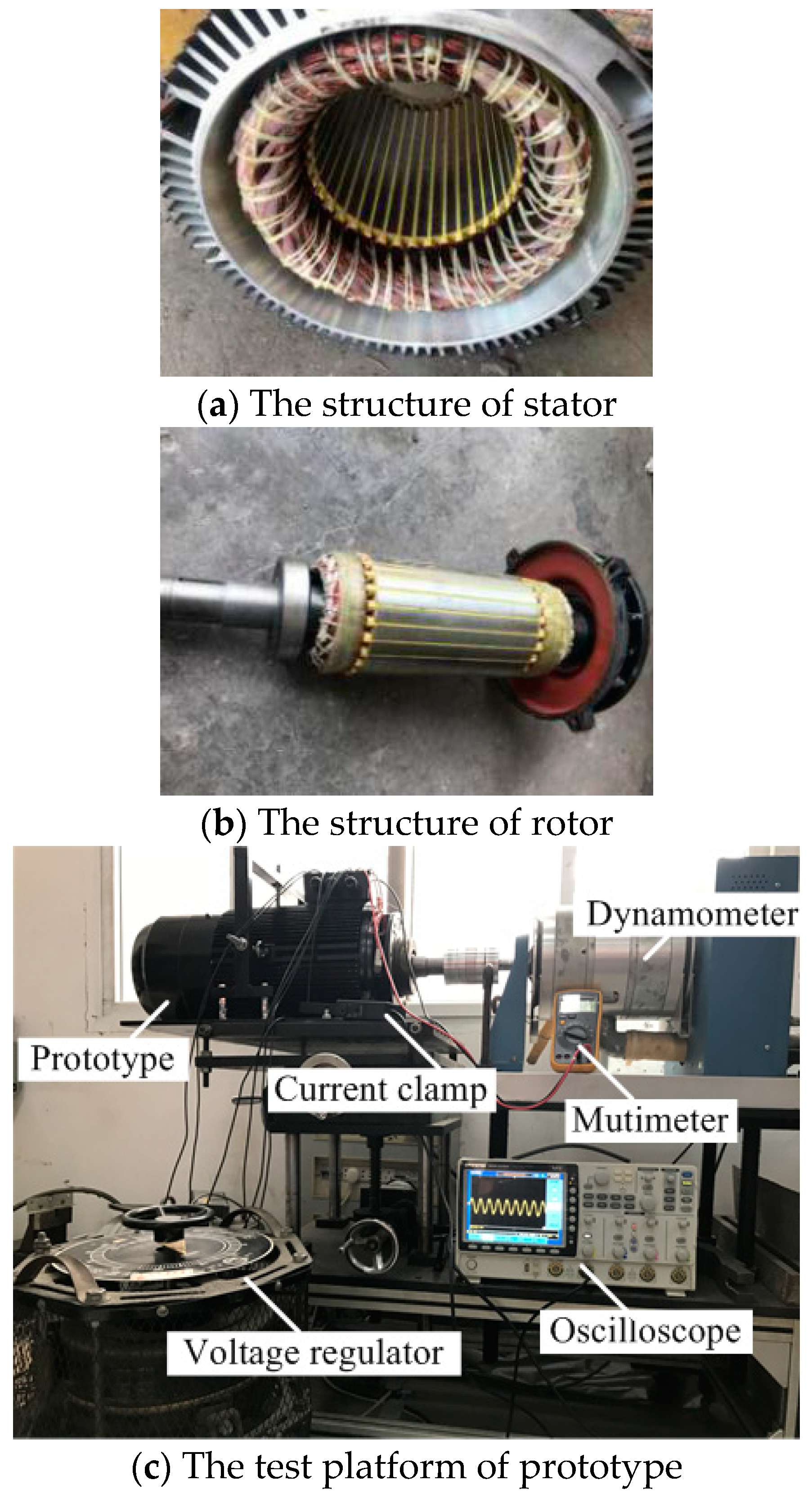
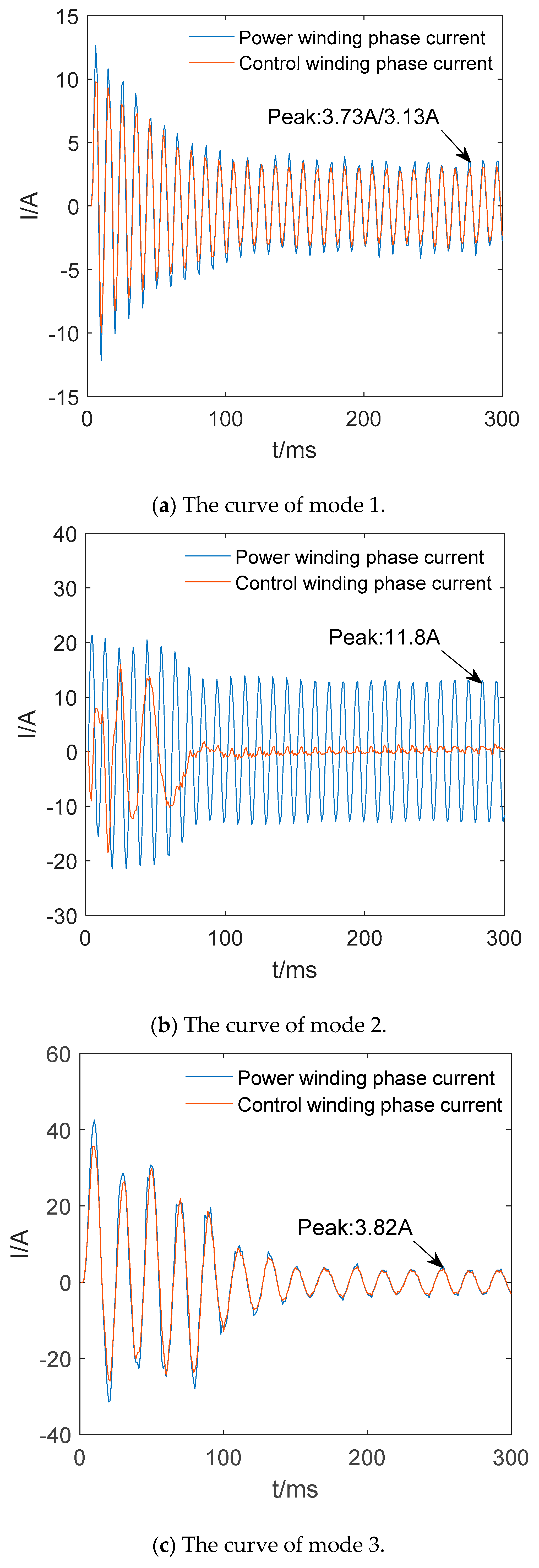
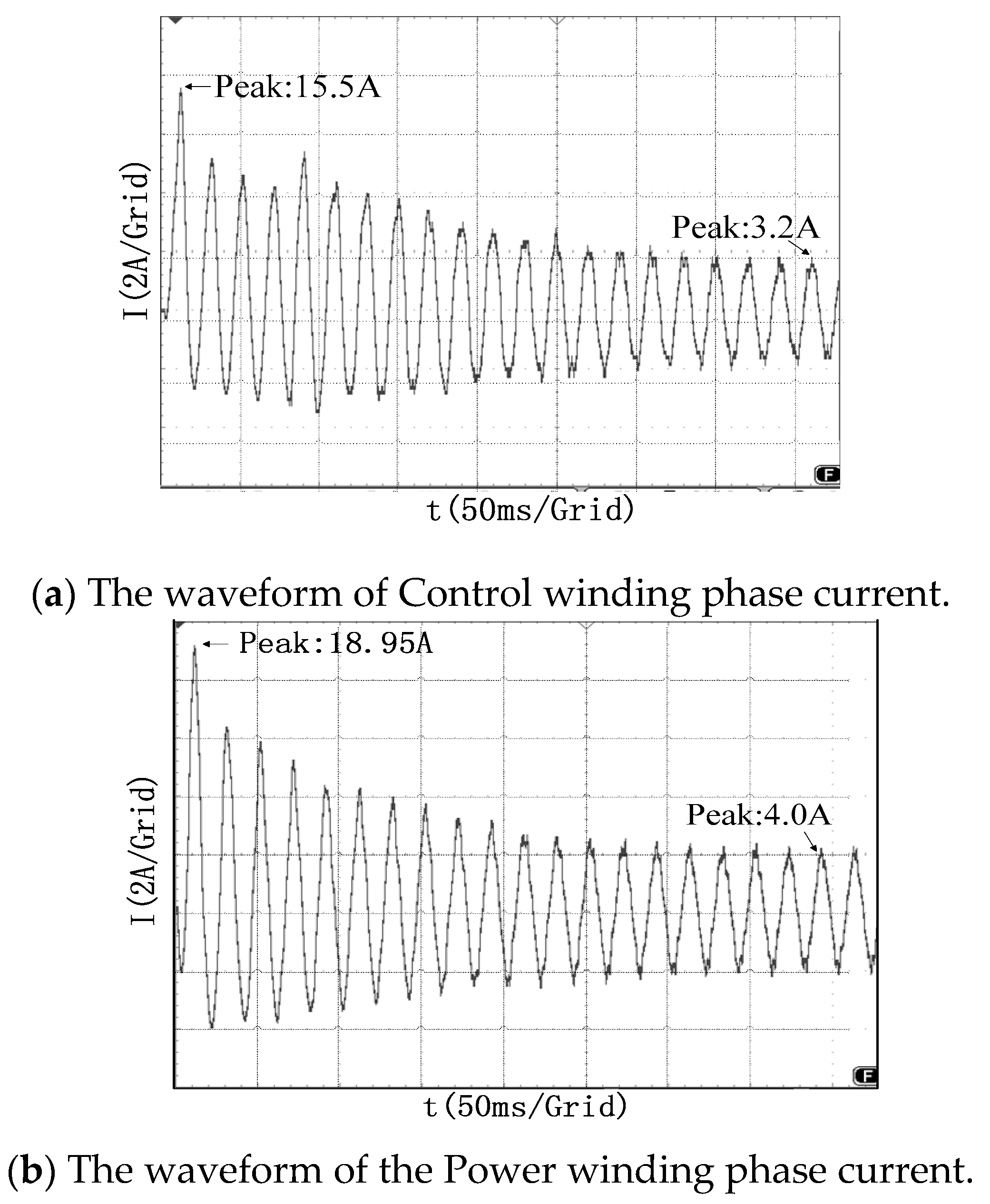
4.2. Simulation Comparison and Test of No-Load Starting Performance of Prototype
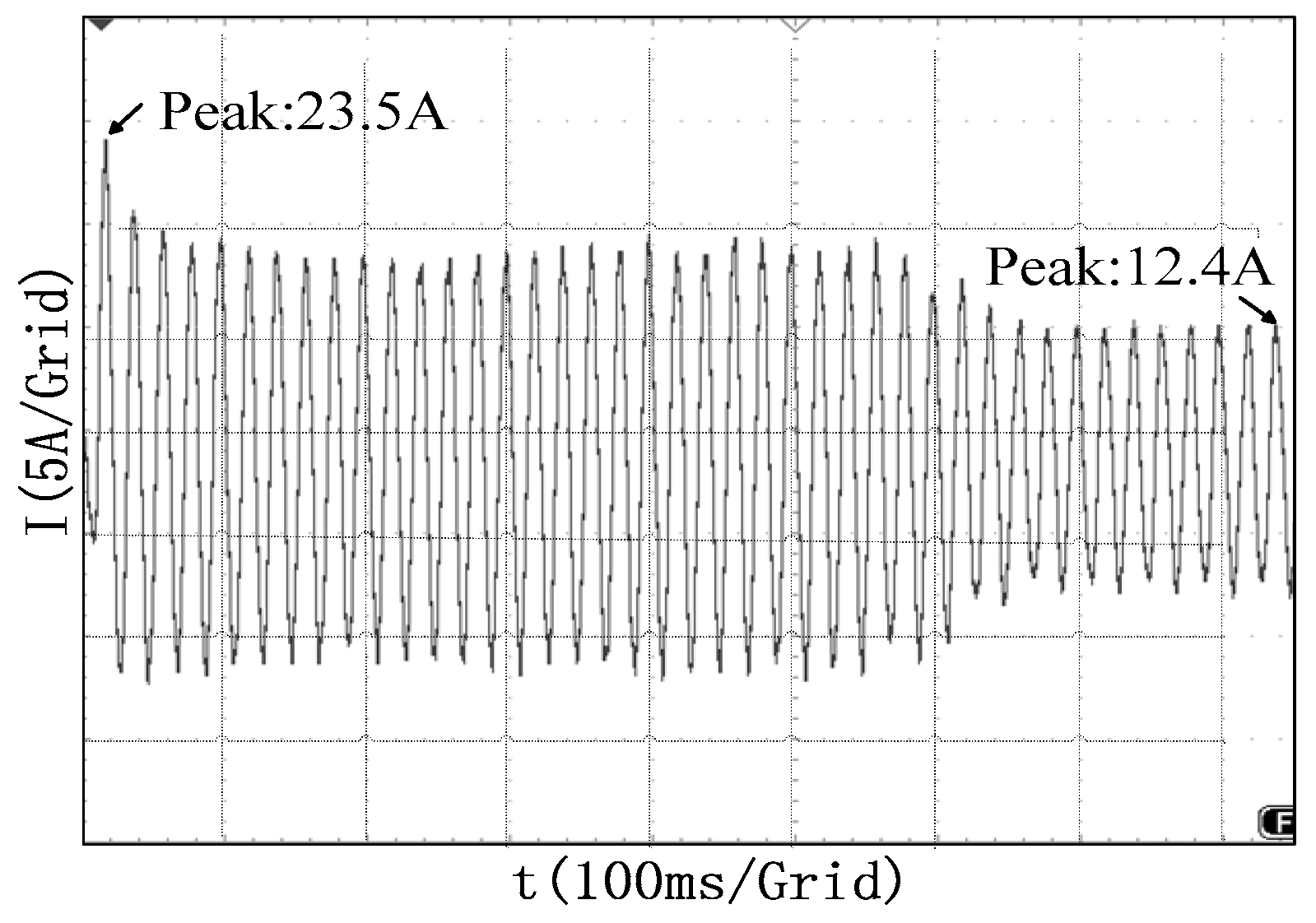
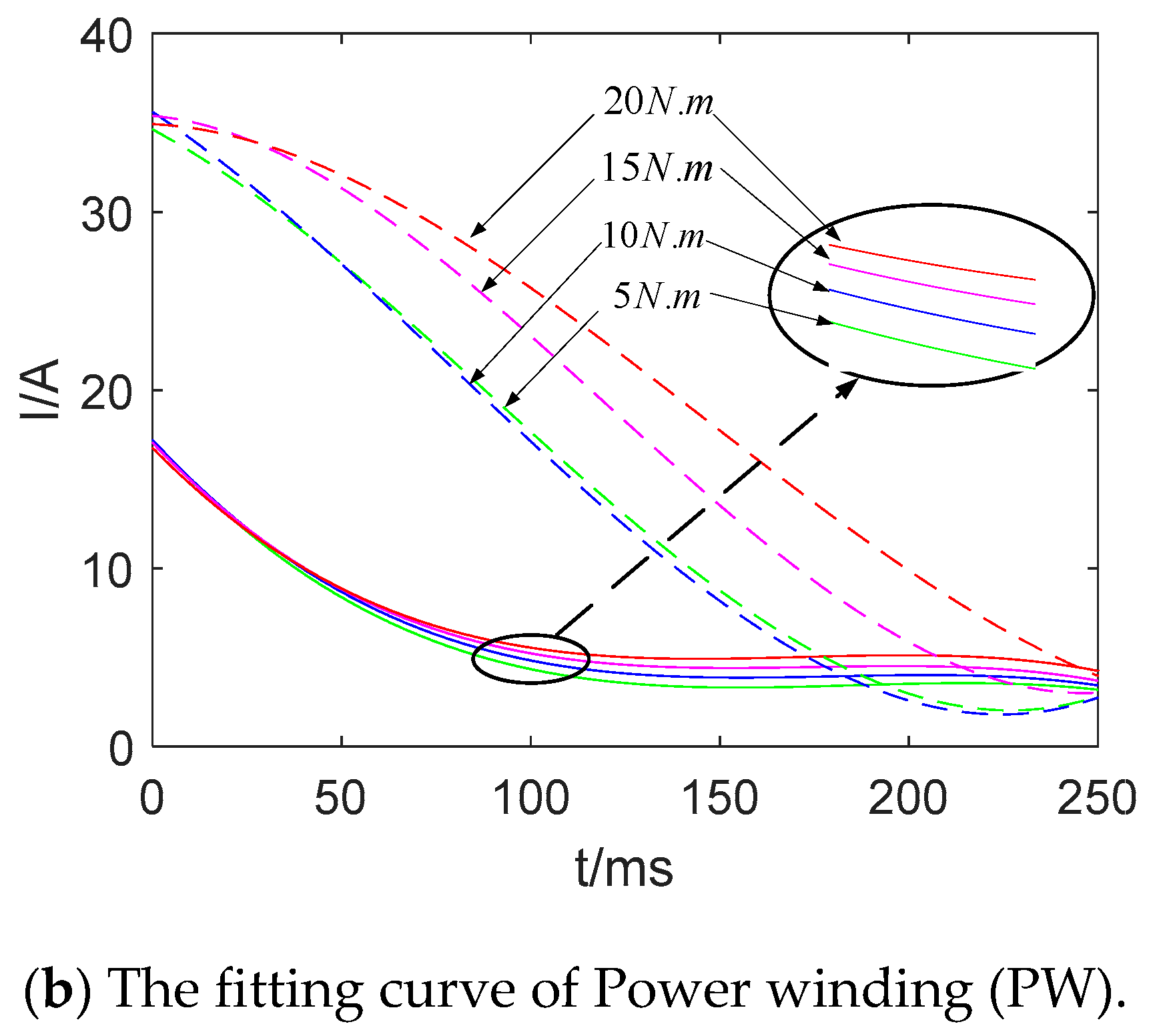
4.3. Simulation Comparison and Test of With-Load Starting Performance of Prototype
5. Conclusions
- (1)
- When the motor starts, the composite coil structure can reduce the effective coil-turns of the rotor winding, hence increasing the referred value of the rotor winding to reduce the starting current and improve the starting torque.
- (2)
- Through the analysis of the operating state and the principle of the composite coil, we find that magnetic fields with different pole-pairs make the composite coil have different operating states. Therefore, we use the winding designed by the pole-changing method for the stator to control the operating state of the composite coil.
- (3)
- On comparing the simulation and test results of the three modes, the starting current is effectively suppressed in mode 1, especially at the moment of start-up. Meanwhile, the prototype has been confirmed to have a better load-carrying performance.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Abdi, S.; Abdi, E.; Oraee, A.; Mcmahon, R. Optimization of magnetic circuit for brushless doubly fed machines. IEEE Trans. Energy Convers. 2015, 30, 1611–1620. [Google Scholar] [CrossRef]
- Liu, Y.; Ai, W.; Chen, B.; Chen, K.; Luo, G. Control design and experimental verification of the brushless doubly-fed machine for stand-alone power generation applications. IET Electr. Power Appl. 2016, 10, 25–35. [Google Scholar] [CrossRef]
- Abdi, S.; Abdi, E.; McMahon, R.A. A study of unbalanced magnetic pull in brushless doubly fed machines. IEEE Trans. Energy Convers. 2015, 30, 1218–1227. [Google Scholar] [CrossRef]
- Han, L.; Ou, X.; Du, J.; Han, X.; Guo, Y. Study of Direct Coupling in Stator Dual Windings of a Brushless Doubly Fed Machine. IEEE Trans. Energy Convers. 2017, 32, 974–982. [Google Scholar] [CrossRef] [Green Version]
- Oraee, A.; Abdi, E.; Abdi, S.; McMahon, R.A.; Tavner, P.J. Effects of rotor winding structure on the BDFM equivalent circuit parameters. IEEE Trans. Energy Convers. 2015, 30, 1660–1669. [Google Scholar] [CrossRef]
- Xiong, F.; Wang, X. Design of a low-harmonic-content wound rotor for the brushless doubly fed generator. IEEE Trans. Energy Convers. 2014, 29, 158–168. [Google Scholar] [CrossRef]
- Xia, C.; Hou, X. Study on the Static Load Capacity and Synthetic Vector Direct Torque Control of Brushless Doubly Fed Machines. Energies 2016, 11, 966. [Google Scholar] [CrossRef]
- Xia, C.; Hou, X.; Chen, F. Flux-Angle-Difference Feedback Control for the Brushless Doubly Fed Machine. Energies 2018, 11, 71. [Google Scholar] [Green Version]
- McMahon, R.; Tavner, P.; Abdi, E.; Malliband, P.; Barker, D. Charac-terising rotors for brushless doubly-fed machines (BDFM). In Proceedings of the Electrical Machines (ICEM), Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar]
- Wang, X. A new brushless doubly-fed machine with a wound-rotor change-pole winding. Proc. Chin. Soc. Electr. Eng. 2003, 23, 108–111. [Google Scholar]
- Zhang, J.; Wang, X.; Wu, T.; Xiong, F.; Kan, C. The principle and harmonic analysis of a new BDFM with tooth harmonic wound rotor using as a generator. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 3622–3626. [Google Scholar]
- Wijaya, F.D.; Kusumawan, S.A.; Prabowo, H. Reducing induction motor starting current using magnetic energy recovery switch (MERS). In Proceedings of the 2014 6th International Conference on Information Technology and Electrical Engineering (ICITEE), Yogyakarta, Indonesia, 7–8 October 2014; pp. 1–6. [Google Scholar]
- Kong, M.; Wang, X.; Li, Z.; Nie, P. Asynchronous operation characteristics and soft-starting method for the brushless doubly-fed motor. IET Electr. Power Appl. 2017, 11, 1276–1283. [Google Scholar] [CrossRef]
- Arabaci, H.; Bilgin, O. Effects of rotor faults in squirrel-cage induction motors on the torque-speed curve. In Proceedings of the XIX International Conference on Electrical Machines-ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–5. [Google Scholar]
- Belhadi, M.B.; Kolli, A.; Krebs, G.; Marchand, C. Evaluation of torque-speed curve of switched reluctance motor with segmental rotor. In Proceedings of the 2012 XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 250–255. [Google Scholar]
- Azar, Z.; Zhu, Z.Q.; Ombach, G. Investigation of Torque–Speed Characteristics and Cogging Torque of Fractional-Slot IPM Brushless AC Machines Having Alternate Slot Openings. IEEE Trans. Ind. Appl. 2012, 48, 903–912. [Google Scholar] [CrossRef]
- McMahon, R.A.; Roberts, P.C.; Wang, X.; Tavner, P.J. Performance of BDFM as generator and motor. IEE Proc.-Electr. Power Appl. 2006, 153, 289–299. [Google Scholar] [CrossRef]
- Jiang, D.; Li, H.; Xianpeng, O.; Xuefeng, H. Experimental Study of Brushless Doubly-Fed Machine with Cage Rotor at the Asynchronous Operation Mode. Proc. CSEE 2016, 36, 3964–3972. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value (mm) |
|---|---|
| Stator Outer Diameter | 215 |
| Stator Inner Diameter | 130 |
| Length of the Gap | 0.4 |
| Rotor Outer Diameter | 129.2 |
| Rotor Inner Diameter | 50 |
| Length of the Core | 190 |
| Torque (N·m) | Mode 1 | Mode 2 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CW/A | PW/A | n/rpm | CW/A | PW/A | n/rpm | |||||||
| TEST | FEA | TEST | FEA | TEST | FEA | TEST | FEA | TEST | FEA | TEST | FEA | |
| 5 | 3.2 | 3.3 | 4.0 | 3.9 | 909 | 907 | - | - | 13.1 | 12.6 | 503 | 498 |
| 10 | 3.4 | 3.3 | 4.0 | 4.0 | 828 | 833 | - | - | 15.3 | 14.7 | 491 | 487 |
| 15 | 3.4 | 3.5 | 5.0 | 4.9 | 729 | 735 | - | - | 18.1 | 18.3 | 473 | 460 |
| 20 | 3.6 | 4.0 | 5.6 | 5.4 | 634 | 645 | - | - | 20.1 | 18.5 | 459 | 440 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruan, Z.; Kan, C.; Chu, C.; Ren, T.; Chen, Q. Improvements of the Starting Performance of A Novel Brushless Doubly-fed Motor Based on the Composite Coils. Energies 2019, 12, 1157. https://doi.org/10.3390/en12061157
Ruan Z, Kan C, Chu C, Ren T, Chen Q. Improvements of the Starting Performance of A Novel Brushless Doubly-fed Motor Based on the Composite Coils. Energies. 2019; 12(6):1157. https://doi.org/10.3390/en12061157
Chicago/Turabian StyleRuan, Zhiwei, Chaohao Kan, Chenglong Chu, Taian Ren, and Qiuming Chen. 2019. "Improvements of the Starting Performance of A Novel Brushless Doubly-fed Motor Based on the Composite Coils" Energies 12, no. 6: 1157. https://doi.org/10.3390/en12061157