An Improved Droop Control Method for Voltage-Source Inverter Parallel Systems Considering Line Impedance Differences



Abstract
:1. Introduction
- (1)
- The effect of the mismatch in line impedance on the power sharing with the traditional droop control method is not well analyzed so far. This paper systematically analyzes it in two different ways.
- (2)
- The communication in this proposed method is just used to set the reference voltage instead of acting in the tuning control loop, therefore the power sharing is not susceptible to any delays in the communication. In addition, when the communication is interrupted, the controller can operate with the last value before the communication failure occurred, which has the advantages of high power sharing accuracy and robustness to the communication interrupt.
- (3)
- This proposed method does not need any complicated algorithms or the value of the line impedance.
- (4)
2. Problem Statement
2.1. The Traditional Droop Control Method
2.2. The Limitation of The Traditional Droop Control against The Line Impedance Difference
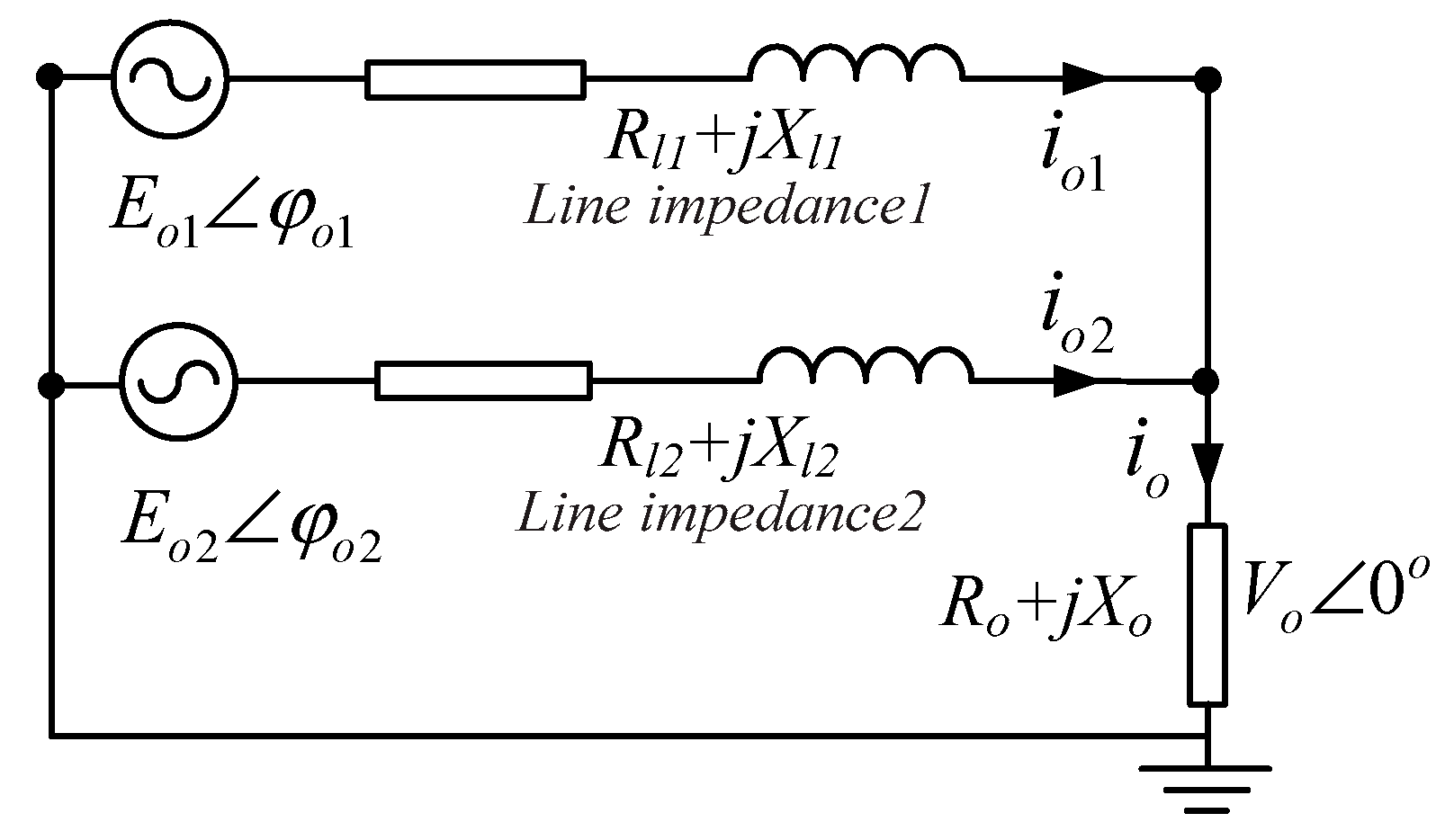
2.2.1. The Analysis Based on The Individual Outputs
2.2.2. The Effect Analysis Based on The Droop Voltage Difference across The Line Impedance
3. The Proposed Droop Control Method and The Small-signal Stability Analysis
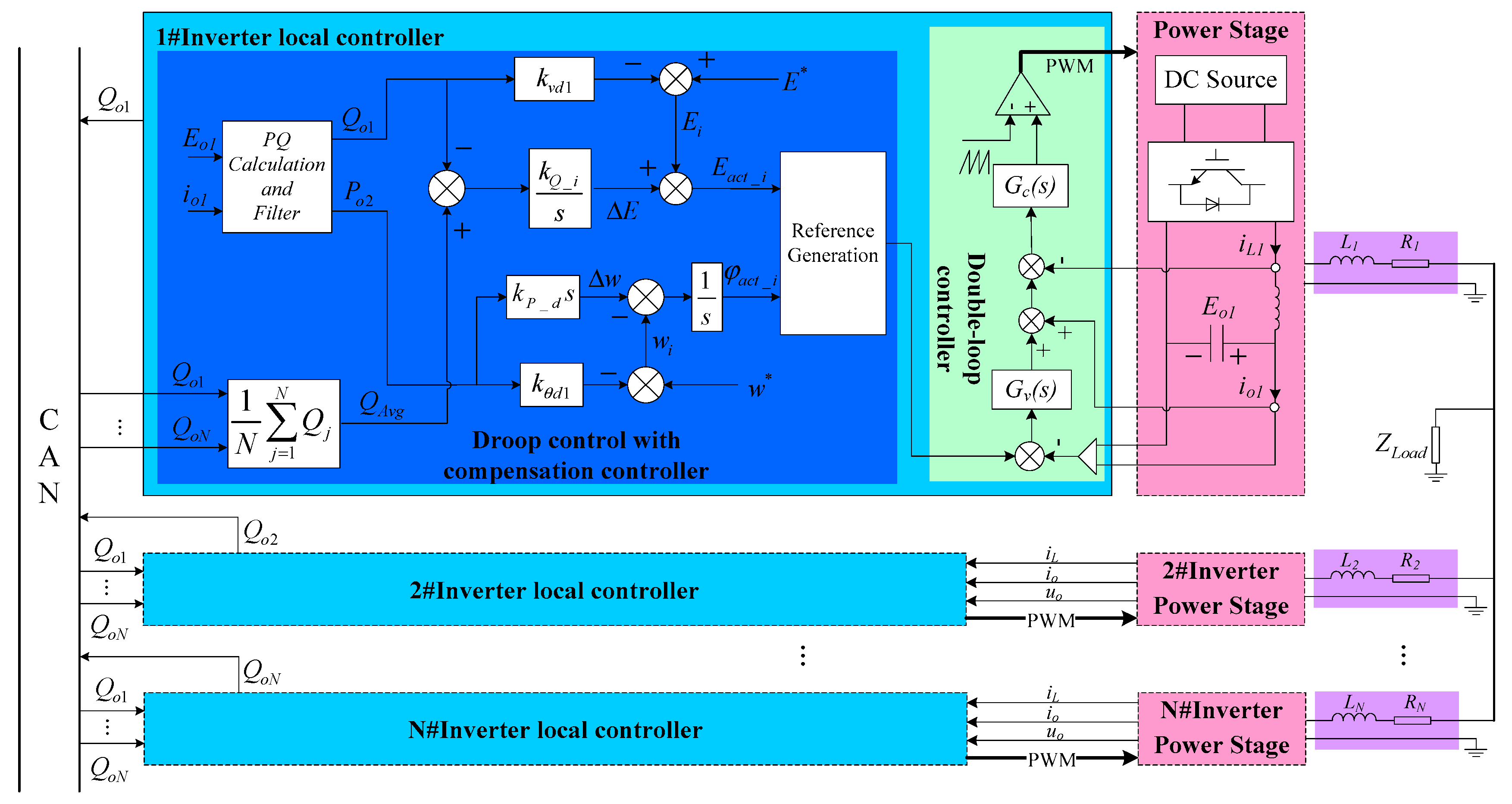
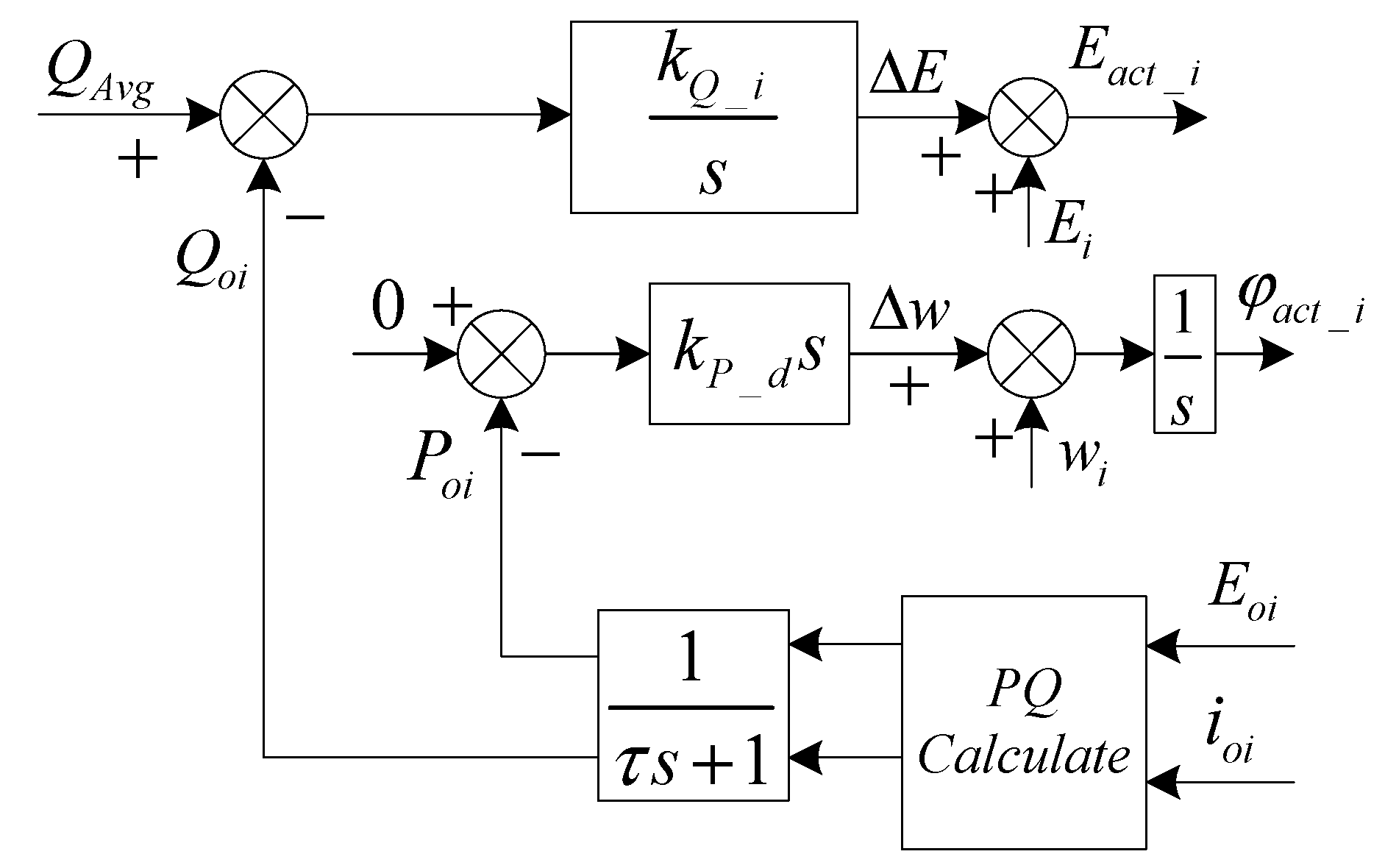
3.1. The Proposed Droop Control Method
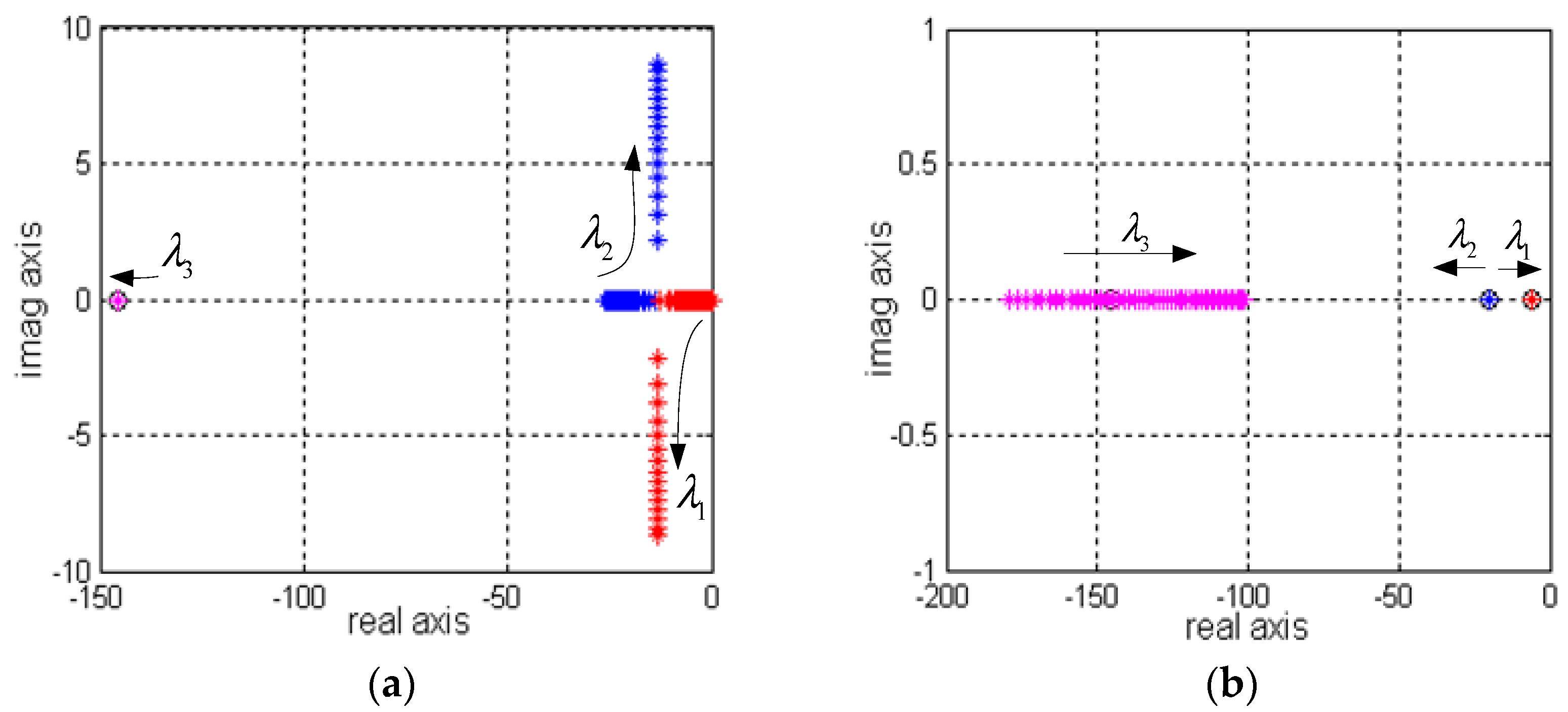
3.2. Small-Signal Stability Analysis
4. Verification of The Proposed Method
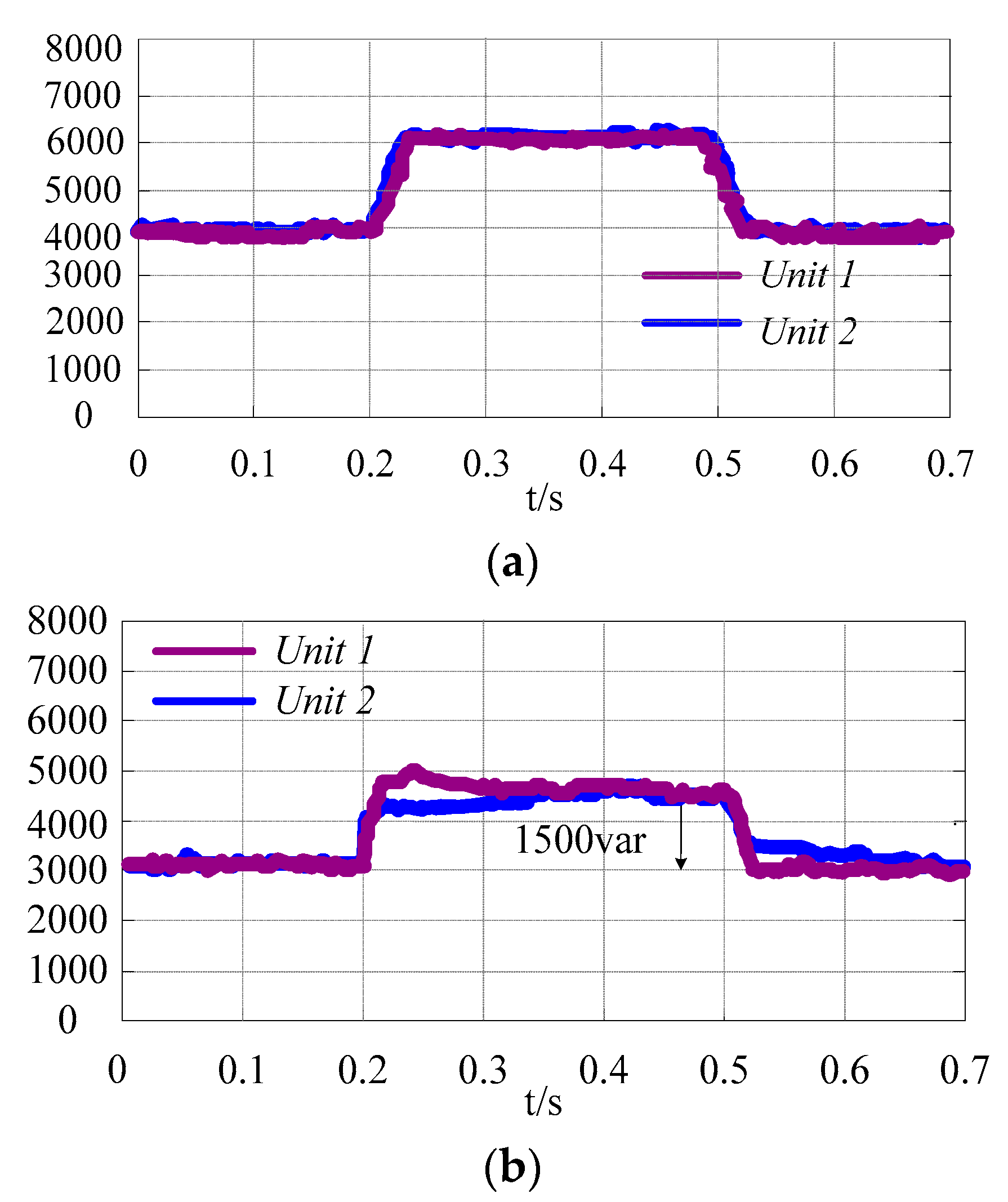
4.1. Simulation Verification
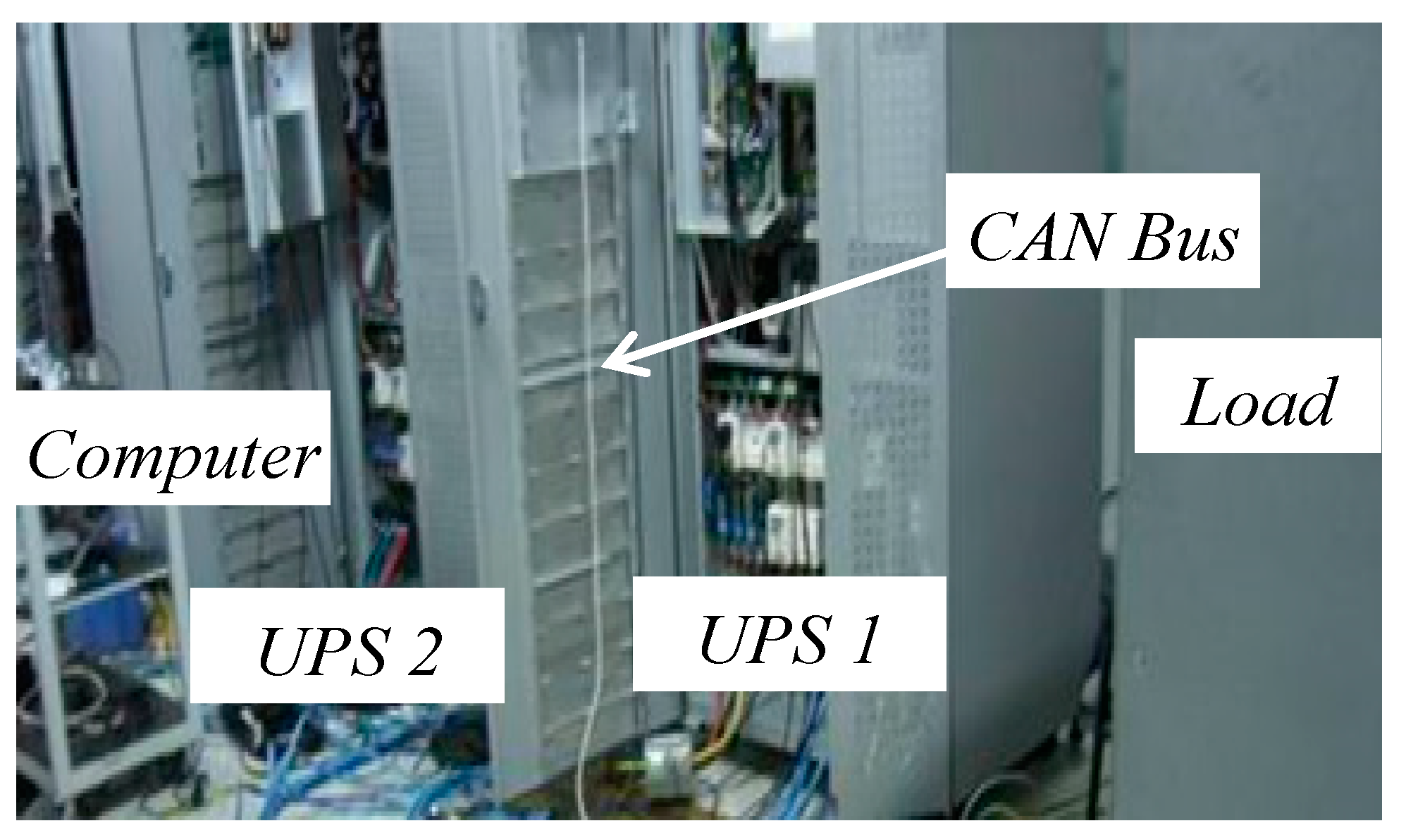
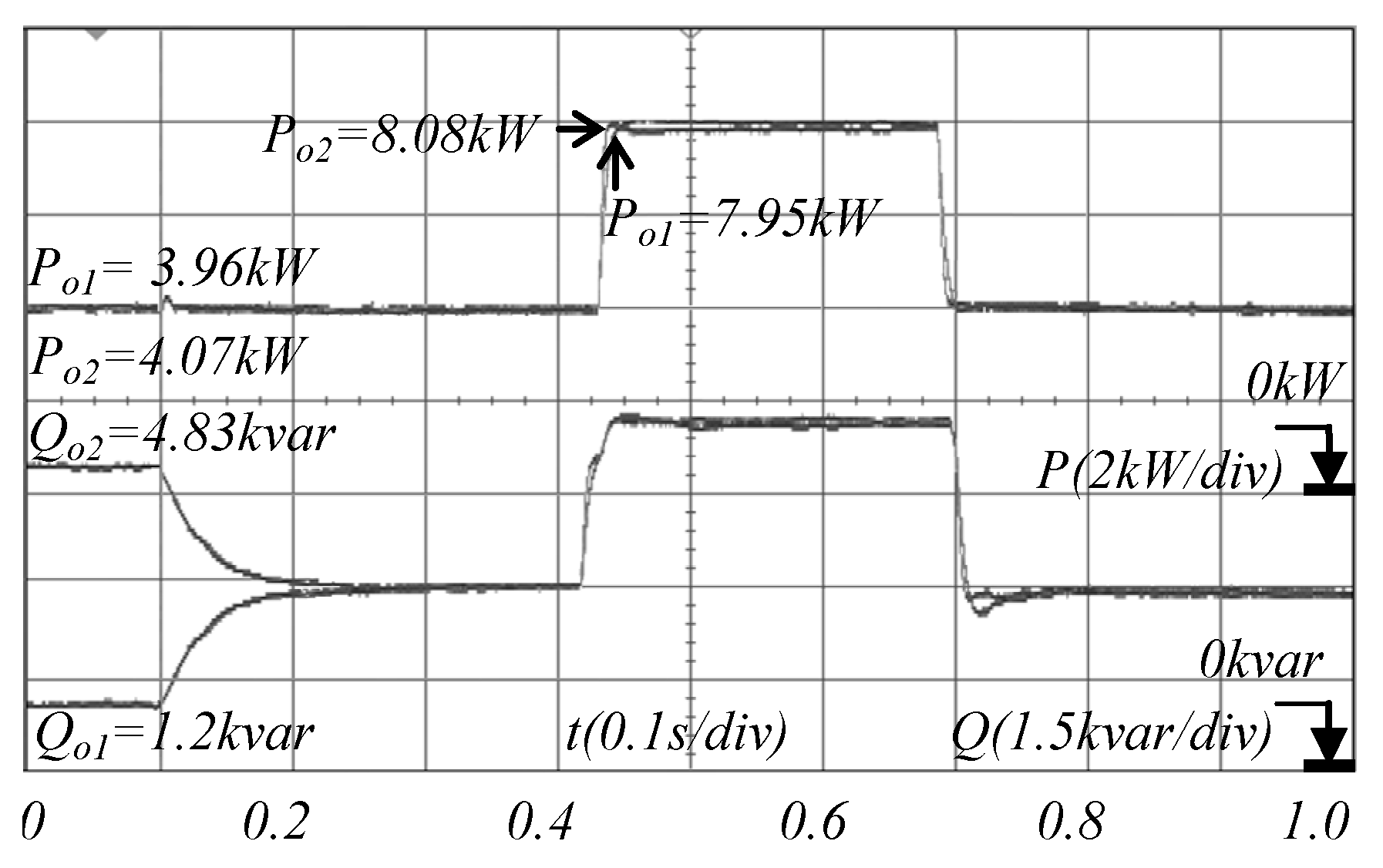
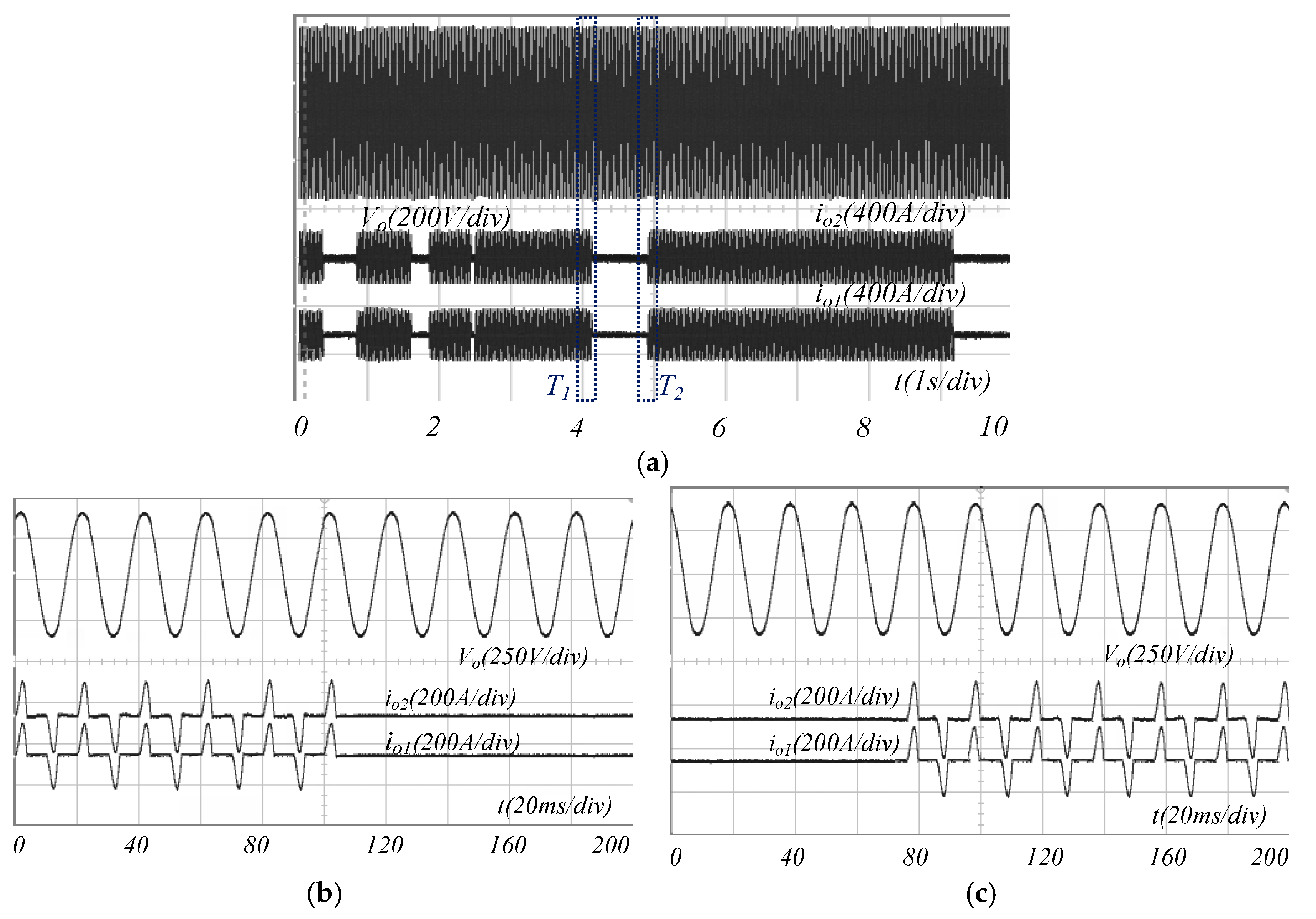
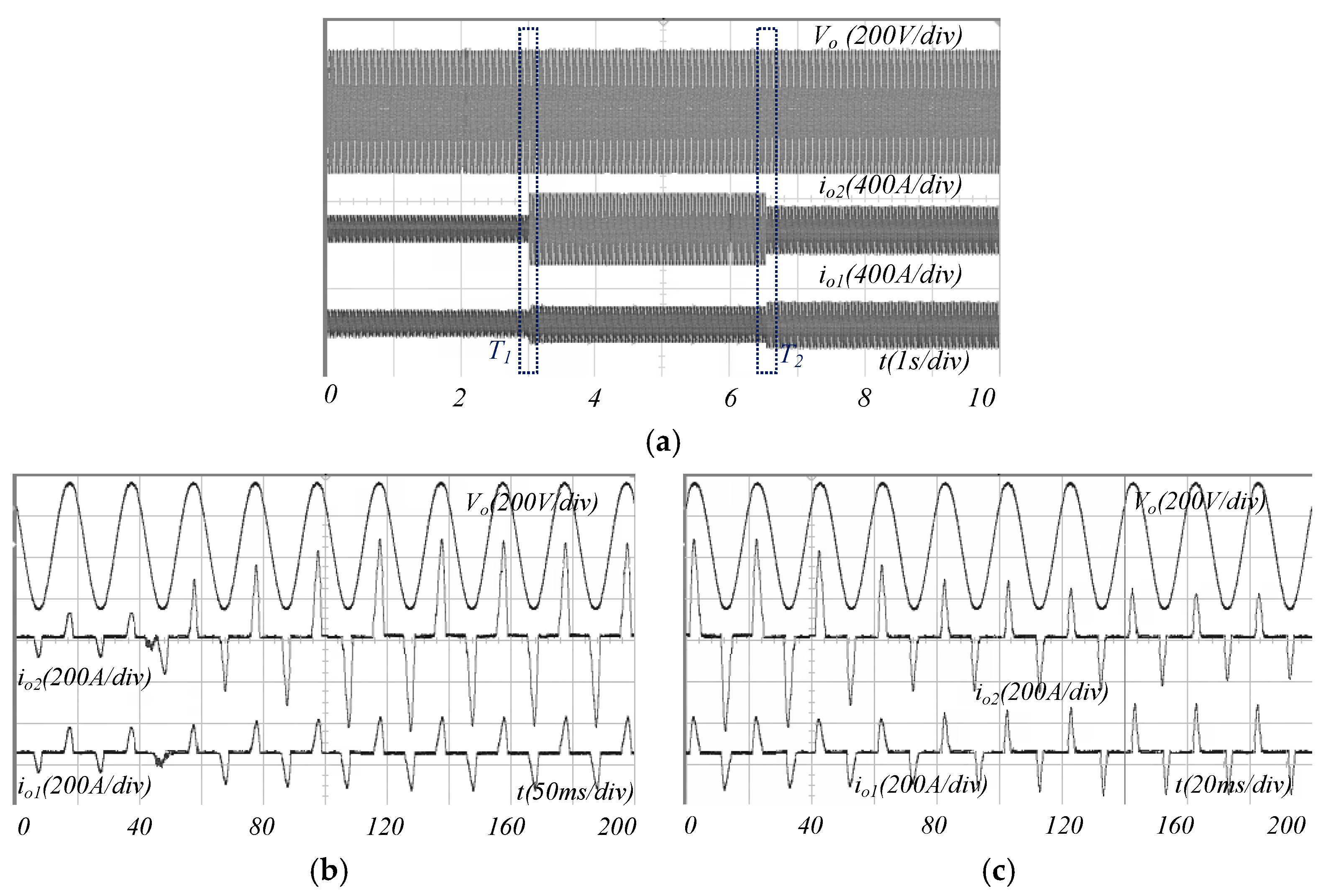
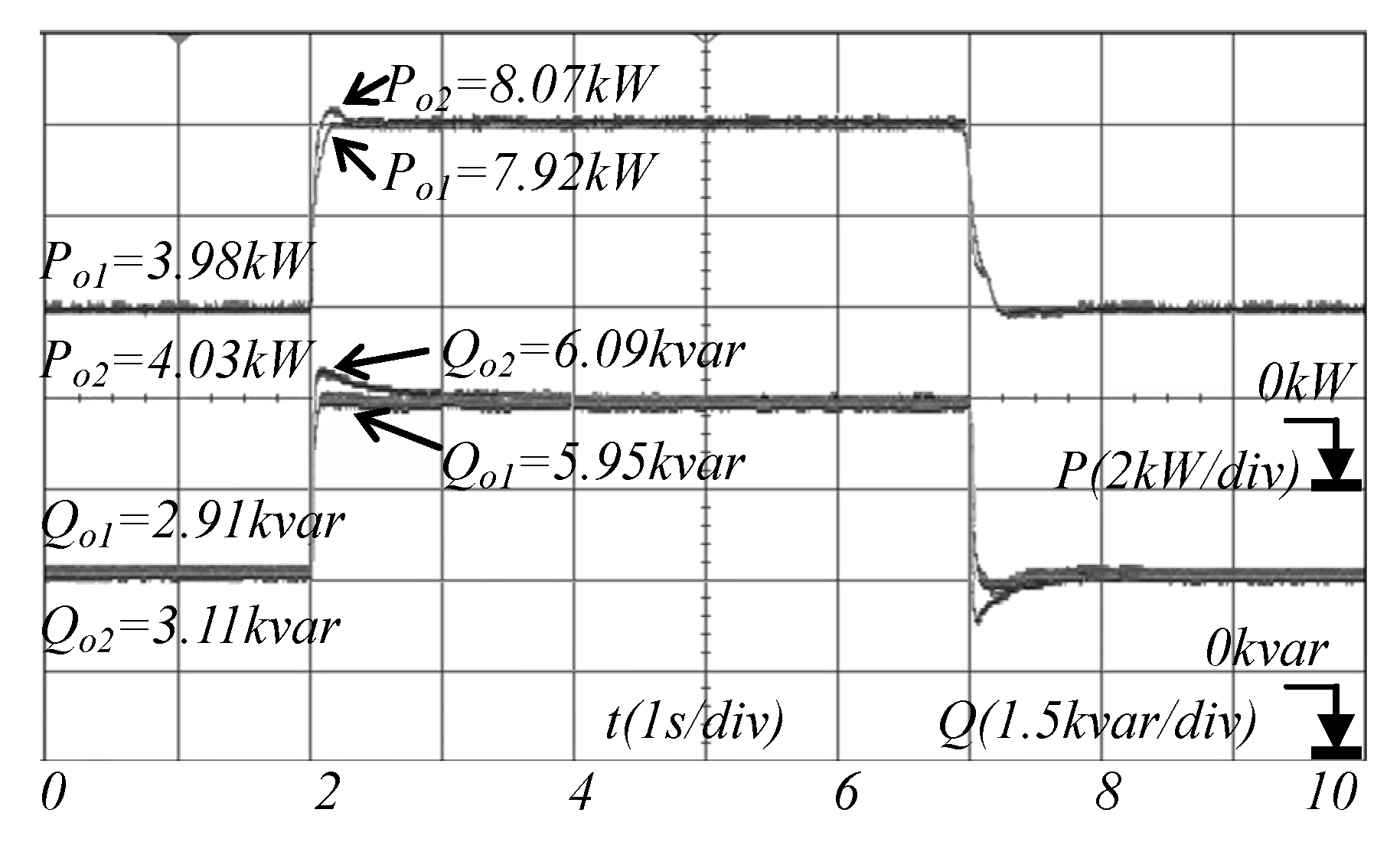
4.2. Experimental Verification
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Furtado, E.C.; Aguirre, L.A.; Tôrres, L.A.B. UPS parallel balanced operation without explicit estimation of reactive power—A simpler scheme. IEEE Trans. Circuits Syst. II Exp. Briefs 2008, 55, 1061–1065. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Garciade Vicuna, L.; Matas, J.; Castilla, M.; Miret, J. Output impedance design of parallel-connected UPS inverters with wireless load-sharing control. IEEE Trans. Ind. Electr. 2005, 52, 1126–1135. [Google Scholar] [CrossRef]
- Liu, W.X.; Kim, J.M.; Wang, C.; Im, W.S.; Liu, L.M.; Xu, H. Power converters based advanced experimental platform for integrated study of power and controls. IEEE Trans. Ind. Inform. 2018, 14, 4940–4952. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; Castilla, M.; Vicuna, L.G. Control strategy for flexible microgrid based on parallel line-interactive UPS systems. IEEE Trans. Ind. Electr. 2009, 56, 726–736. [Google Scholar] [CrossRef]
- Lazzarin, T.B.; Guilherme, A.T.B.; Barbi, I. A Control strategy for parallel operation of single-phase voltage source inverters: Analysis design and experimental results. IEEE Trans. Ind. Electr. 2013, 60, 2194–2204. [Google Scholar] [CrossRef]
- Aamir, M.; Mekhilef, S. An online transformerless uninterruptible power supply (UPS) system with a smaller battery bank for low-power applications. IEEE Trans. Power Electr. 2017, 32, 233–247. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, H. Theoretical and experimental investigation of networked control for parallel operation of inverters. IEEE Trans. Ind. Electr. 2012, 59, 1961–1970. [Google Scholar] [CrossRef]
- Godoy, R.B.; Pinto, J.O.P.; Canesin, C.A.; Coelho, E.A.A.; Pinto, A.M.A.C. Differential-evolution-based optimization of the dynamic response for parallel operation of inverters with no controller interconnection. IEEE Trans. Ind. Electr. 2012, 59, 2859–2866. [Google Scholar] [CrossRef]
- Chen, T.P. Dual-modulator compensation technique for parallel inverters using space-vector modulation. IEEE Trans. Ind. 2009, 56, 3004–3012. [Google Scholar] [CrossRef]
- Han, H.; Liu, Y.; Sun, Y.; Su, M.; Guerrero, J.M. An improved droop control strategy for reactive power sharing in islanded microgrid. IEEE Trans. Power Electr. 2015, 30, 3133–3141. [Google Scholar] [CrossRef]
- Yao, W.; Chen, M.; Matas, J.; Guerrero, J.M.; Qian, Z.M. Design and analysis of the droop control method for parallel inverters considering the impact of the complex impedance on the power sharing. IEEE Trans. Ind. Electr. 2011, 58, 576–588. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; Vicuna, L.G.; Castilla, M.; Miret, J. Decentralized control for parallel operation of distributed generation inverters using resistive impedance. IEEE Trans. Ind. Electr. 2007, 54, 994–1004. [Google Scholar] [CrossRef]
- Zhu, Y.X.; Zhuo, F.; Wang, F.; Liu, B.Q.; Zhao, Y.J. A wireless load sharing strategy for islanded microgrid based on feeder current sensing. IEEE Trans. Power Electr. 2015, 30, 6706–6719. [Google Scholar] [CrossRef]
- He, J.W.; Li, Y.W.; Blaabjerg, F. An enhanced islanding microgrid reactive power, imbalance power, and harmonic power sharing scheme. IEEE Trans. Power Electr. 2015, 30, 3389–3401. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Accurate reactive power sharing in an islanded microgrid using adaptive virtual impedances. IEEE Trans. Power Electr. 2014, 30, 1605–1617. [Google Scholar] [CrossRef]
- Rowe, C.N.; Summers, T.J.; Betz, R.E.; Cornforth, D.J.; Moore, T.G. Arctan power–frequency droop for improved microgrid stability. IEEE Trans. Power Electr. 2013, 28, 3747–3759. [Google Scholar] [CrossRef]
- Wu, T.; Liu, Z.; Liu, J.; Wang, S.; You, Z. A unified virtual power decoupling method for droop controlled parallel inverters in microgrids. IEEE Trans. Power Electr. 2016, 31, 5587–5603. [Google Scholar] [CrossRef]
- Hou, G.; Xing, F.; Yang, Y.; Zhang, J. Virtual negative impedance droop method for parallel inverters in microgrids. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 1009–1013. [Google Scholar]
- Gao, M.; Chen, M.; Wang, C.X.; Qian, Z.M. An accurate power-sharing control method based on circulating-current power phasor model in voltage-source-inverter parallel-operation system. IEEE Trans. Power Electr. 2018, 33, 4458–4476. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.W. Power management of inverter interfaced autonomous microgrid based on virtual frequency-voltage frame. IEEE Trans. Smart Grid. 2011, 2, 30–40. [Google Scholar] [CrossRef]
- Lee, C.T.; Hsu, C.W.; Cheng, P.T. A low-voltage ride-through technique for grid-connected converters of distributed energy resources. IEEE Trans. Ind. Appl. 2011, 47, 1821–1832. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhuo, F.; Wang, F.; Liu, B.; Gou, R.; Zhao, Y. A virtual impedance optimization method for reactive power sharing in networked microgrid. IEEE Trans. Power Electr. 2016, 31, 2890–2904. [Google Scholar] [CrossRef]
- Tarasiuk, T.; Gorniak, M. Load sharing in ship microgrids under nonsinusoidal conditions—Case Study. IEEE Trans. Energy Convers. 2017, 32, 810–819. [Google Scholar] [CrossRef]
- Wang, L.; Chen, J.; Li, X.; Sun, X.; Guerrero, J.M. Fundamental impedance identification method for grid-connected voltage source inverters. IET Power Electr. 2014, 7, 1099–1105. [Google Scholar] [Green Version]
- Vasquez, J.C.; Guerrero, J.M.; Savaghebi, M.; Eloy-Garcia, J.; Teodorescu, R. Modeling, analysis, and design of stationary-reference-frame droop-controlled parallel three-phase voltage source inverters. IEEE Trans. Ind. Electr. 2013, 60, 1271–1280. [Google Scholar] [CrossRef]
- Andishgar, M.H.; Gholipour, E.; Hooshmand, R.A. An overview of control approaches of inverter-based microgrids in islanding mode of operation. Renew. Sust. Energy Rev. 2017, 80, 1043–1060. [Google Scholar] [CrossRef]
- Wang, X.; Li, Y.W.; Blaabjerg, F.; Loh, P.C. Virtual-impedance-based control for voltage-source and current-source converters. IEEE Trans. Power Electr. 2015, 30, 7019–7037. [Google Scholar] [CrossRef]
- Sun, X.; Hao, Y.; Wu, Q.; Guo, X.; Wang, B. A multifunctional and wireless droop control for distributed energy storage units in islanded AC microgrid applications. IEEE Trans. Power Electron. 2017, 32, 736–751. [Google Scholar] [CrossRef]
- Liang, H.; Choi, B.J.; Zhuang, W.; Shen, X. Stability enhancement of decentralized inverter control through wireless communications in microgrids. IEEE Trans. Smart Grid. 2013, 4, 321–331. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. An enhanced microgrid load demand sharing strategy. IEEE Trans. Power Electr. 2012, 27, 3984–3995. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of power converters in ac microgrids. IEEE Trans. Power Electr. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Roslan, A.M.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. Improved instantaneous average current-sharing control scheme for parallel-connected inverter considering line impedance impact in microgrid networks. IEEE Trans. Power Electr. 2011, 26, 702–716. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Guerrero, J.M.; Blaabjerg, F.; Vasquez, J.C. An islanding microgrid power sharing approach using enhanced virtual impedance control scheme. IEEE Trans. Power Electr. 2013, 28, 5272–5282. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols of Items | Value | Unit |
|---|---|---|
| , | 2 × 10−5 | rad/W |
| 3 × 10−8 | rad/W/s | |
| , | 5 × 10−5 | V/var |
| 5 × 10−3 | V/var/s | |
| 314 | rad/s | |
| 311 | V | |
| , | 0 | rad |
| 0.617 | Ω | |
| 0.317 | Ω | |
| 0.04 | s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Wang, X.; Liu, J.; Gao, H. An Improved Droop Control Method for Voltage-Source Inverter Parallel Systems Considering Line Impedance Differences. Energies 2019, 12, 1158. https://doi.org/10.3390/en12061158
Ma J, Wang X, Liu J, Gao H. An Improved Droop Control Method for Voltage-Source Inverter Parallel Systems Considering Line Impedance Differences. Energies. 2019; 12(6):1158. https://doi.org/10.3390/en12061158
Chicago/Turabian StyleMa, Junjie, Xudong Wang, Jinfeng Liu, and Hanying Gao. 2019. "An Improved Droop Control Method for Voltage-Source Inverter Parallel Systems Considering Line Impedance Differences" Energies 12, no. 6: 1158. https://doi.org/10.3390/en12061158