Recognition and Classification of Incipient Cable Failures Based on Variational Mode Decomposition and a Convolutional Neural Network

Abstract
:1. Introduction
2. Methods
2.1. VMD
2.2. Feature Extraction
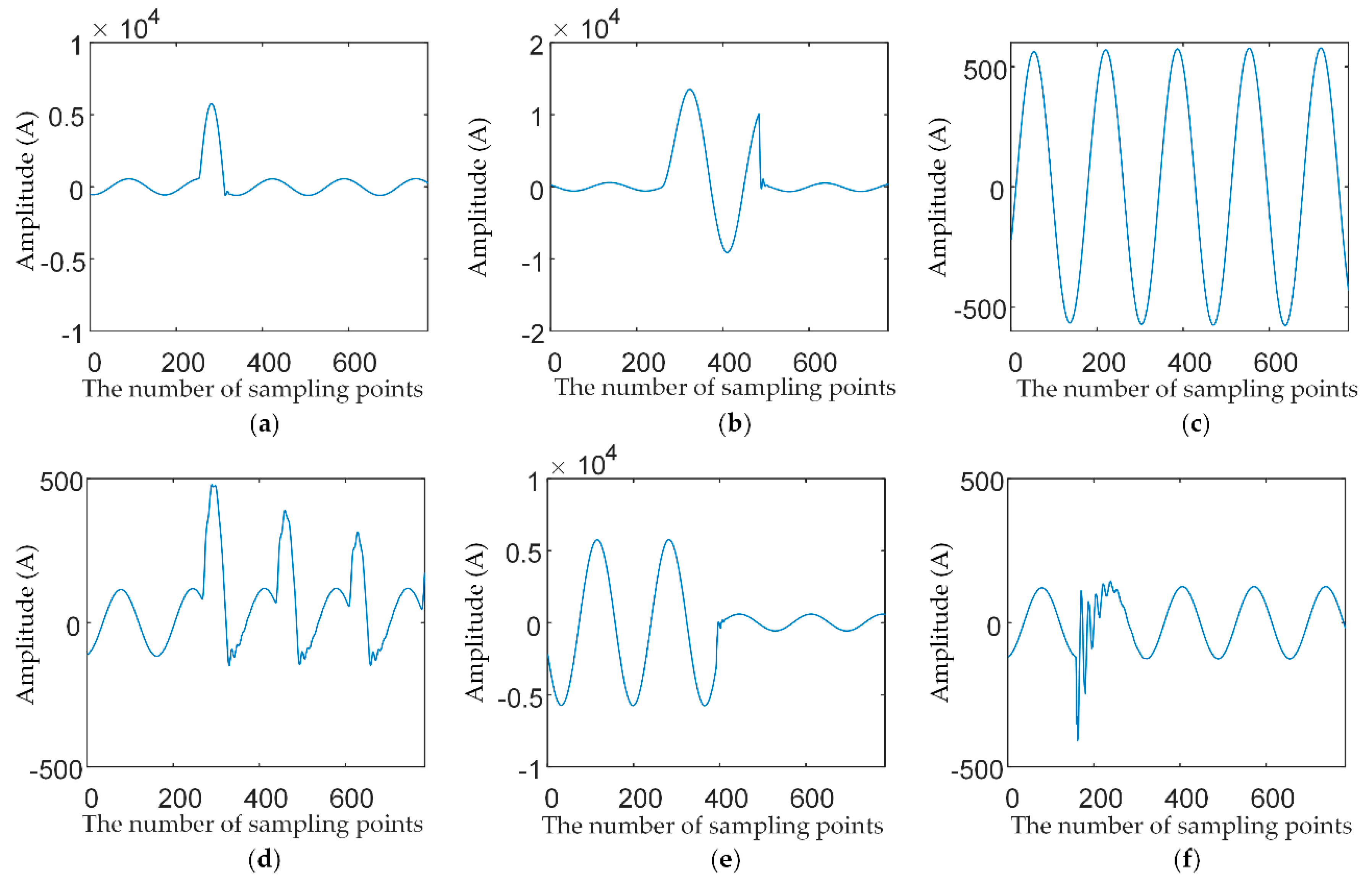
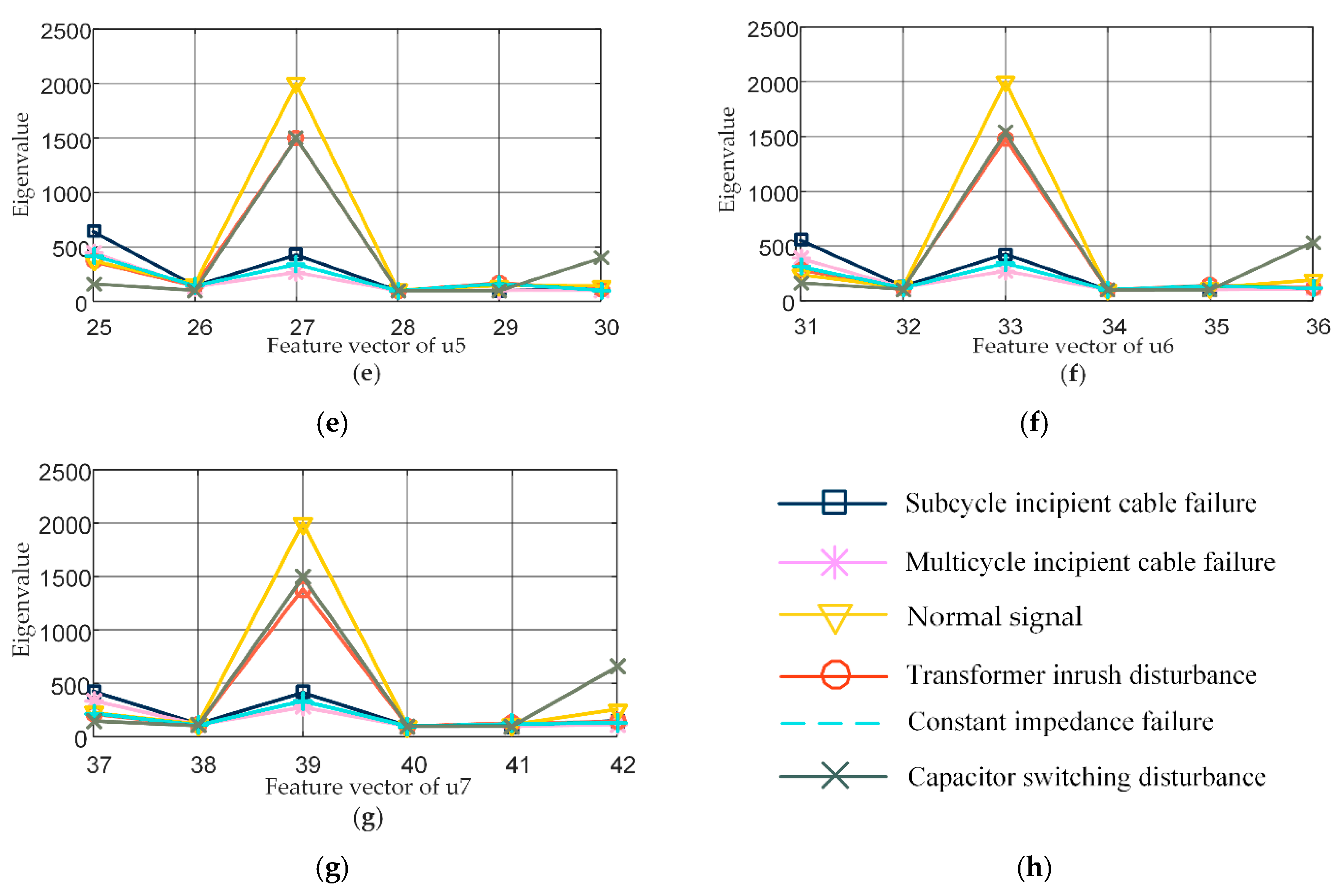
- F1: F1 represents the peak-to-peak value, i.e., the range of signal amplitude variation. An observation of six types of signals indicates that F1 of multicycle cable failure is several times that of other signals. Therefore, this feature plays a key role in distinguishing between multicycle cable failure from the range of amplitudes of different signals. For the k-th mode, F1 is given by:
- F2: This feature is the root mean square (RMS), which represents the effective value of the periodic signal. Because the RMS is the squared average calculated over one cycle, the feature helps to separate all multicycle failure signals from other types. Hence, F2 is an important reference in the recognition of multicycle cable failure, normal signals, transformer inrush disturbance and constant impedance failure. For the kth mode, F2 is given by:
- F3: The feature F3 represents the number of zero crossings, which is used to identify the oscillatory characteristics and noise of the stationary signal for each mode. For the kth mode, F3 is computed as follows:Here, is a symbolic function. Taking into account the duration of different nonstationary signals at the zero position, F3 reflects the state of the waveform, where the signal crosses zero for each mode, which is helpful to distinguish the overcurrent disturbance, normal signal and noise.
- F4: The mode relative energy ratio represents the contribution of the energy of each mode to the total energy of the original signal. For the kth mode, this ratio is denoted as:The main energy of different signals is distributed over different decomposition modes, e.g., the energy of the normal signals is mainly distributed over the first one decomposition mode, and the latter modes contain only DC components. According to this feature, incipient cable failure, normal signals and overcurrent disturbance can be distinguished accurately.F5: The instantaneous amplitude envelope of each mode is used to distinguish between short- and long-duration variations (such as subcycle failure, transformer inrush disturbance and constant impedance failure). For the k-th mode, F5 is defined using a sliding window of length s as follows:Here, represents the number of sliding windows.
- F6: The center frequency () is selected as the sixth feature. Since the VMD process is implemented in the frequency domain, this condition eliminates the need for additional calculation of the frequency domain information of each mode. F6 is used to distinguish the DC component, fundamental frequency, and oscillation of different modes.
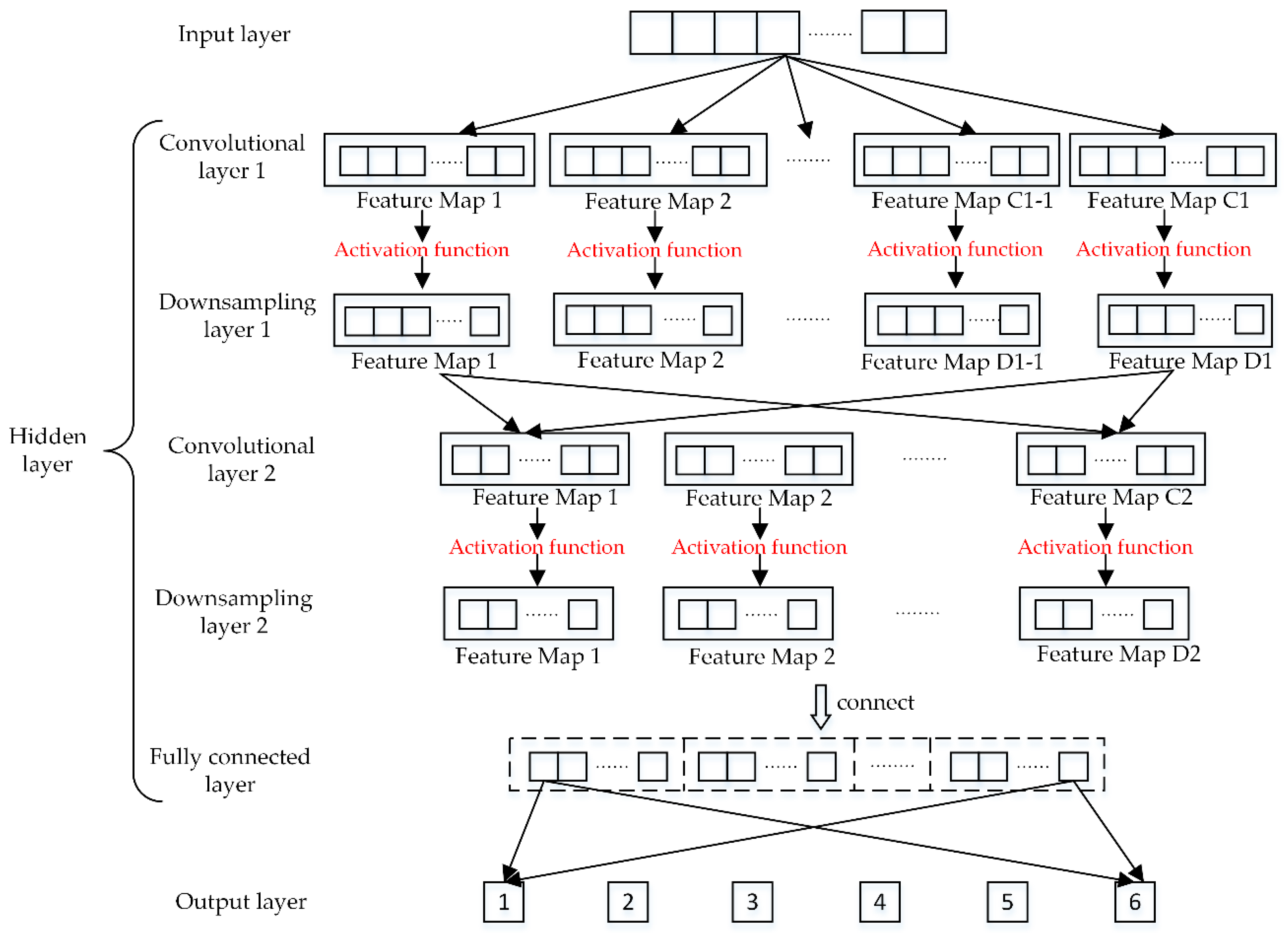
2.3. CNN
3. Results
3.1. Data Acquisition
3.2. Experimental Analysis
- (i)
- Moderate bandwidth constraint α: This parameter affects the bandwidth of the decomposed signal. For the signals with a wide frequency range, α is generally set in the range of a few hundred, while for signal content in a small frequency range, α is kept in the range of tens of thousands. According to the frequency range of the six types of signals in this experiment, is used.
- (ii)
- Noise-tolerance τ: This parameter affects the equal constraint of the Lagrange multiplier λ on reconstruction. In general, if accurate reconstruction is not required under high noise, τ can be set to 0 such that λ is 0.
- (iii)
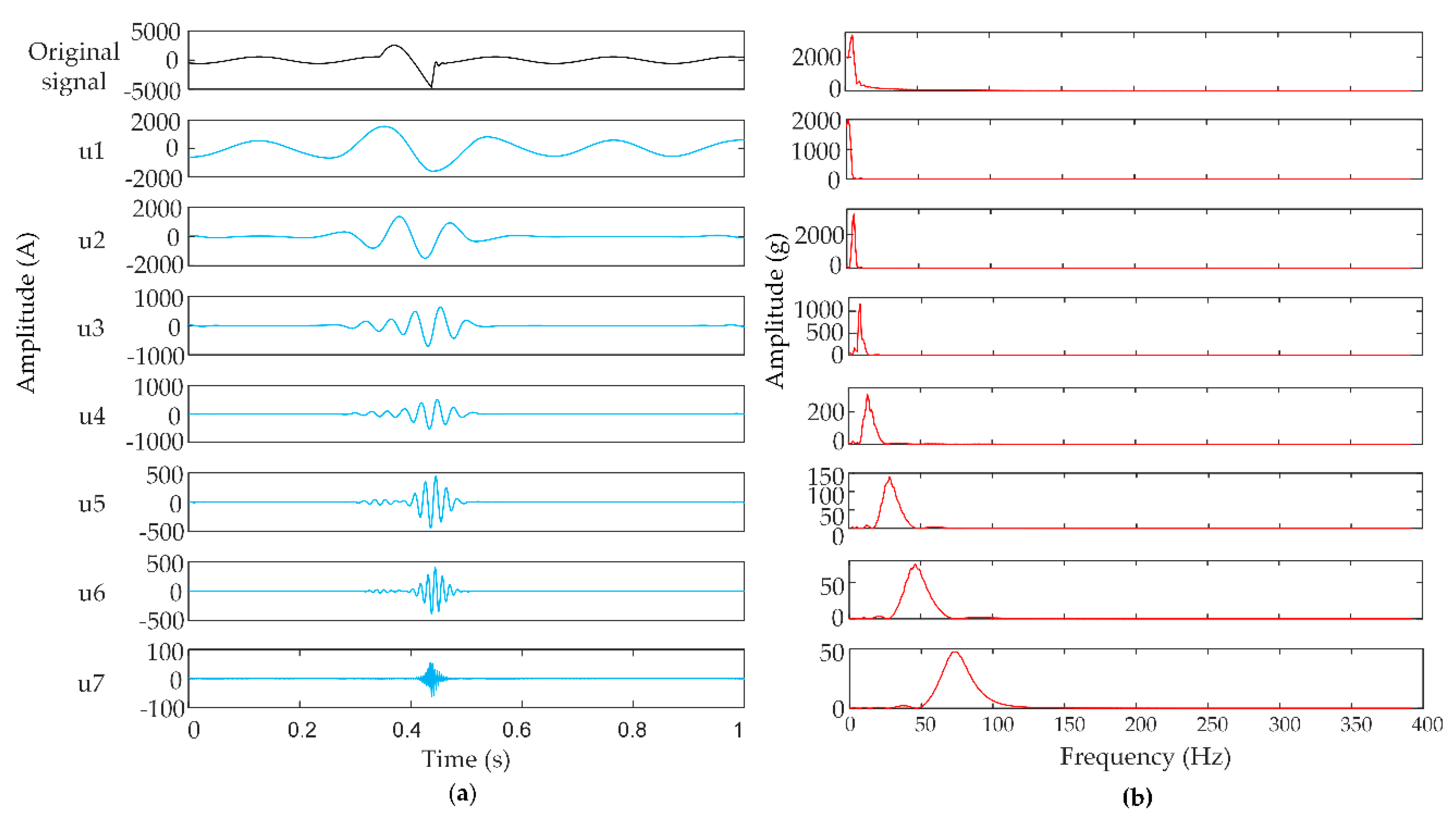
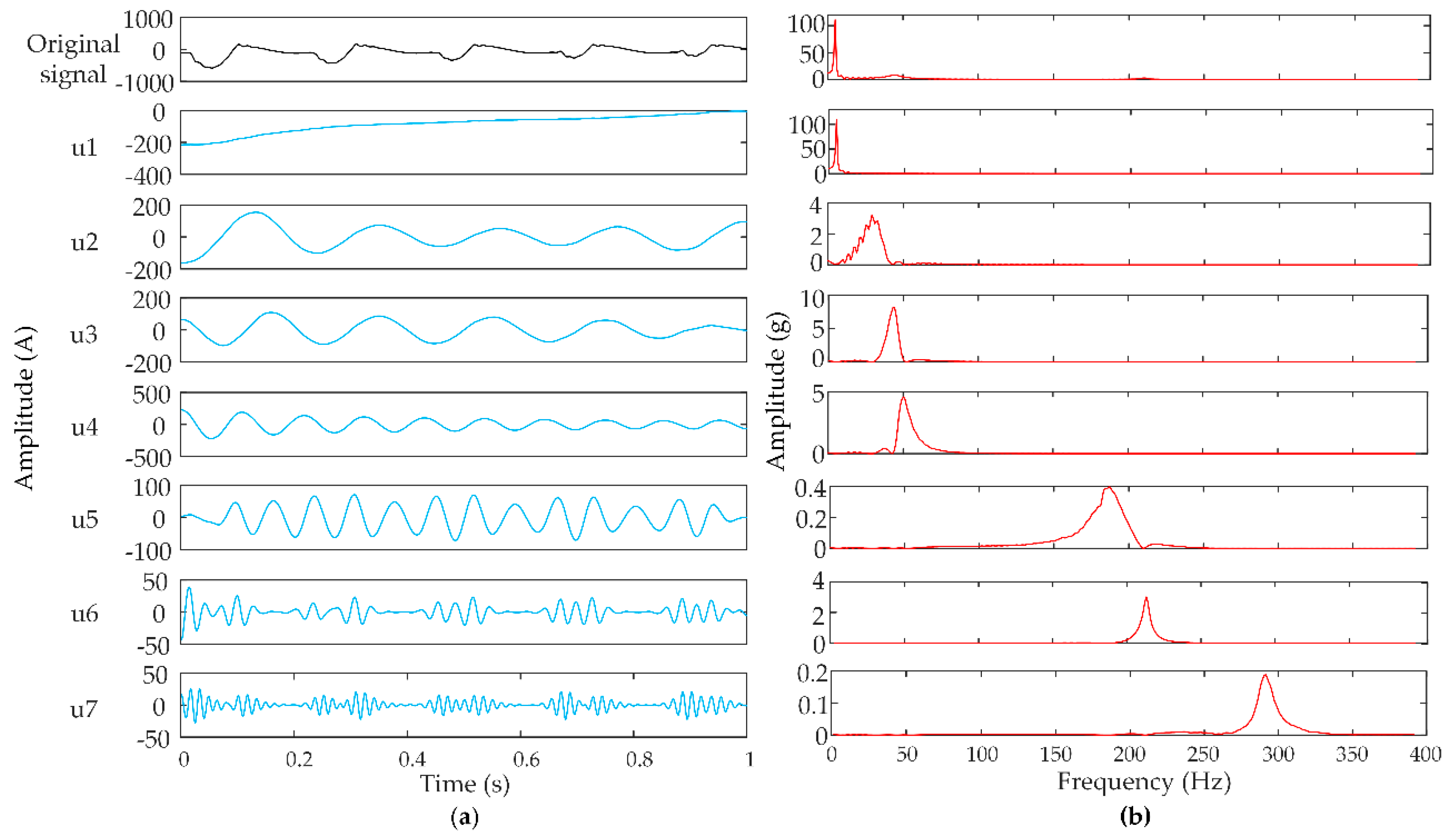
- The number of decomposed modes K: VMD needs to preset the number of decompose modes K. If K is too small, the decomposed modes are too few, and all the decomposition modes cannot be captured; while if the value of K is too large, the interfering signal will be overdecomposed such that the center frequencies of modes will be mixed. By repeated observation in the experiment, the maximum center frequency and the minimum center frequency of the six types of signals are nearly constant when K = 7, and there is no large fluctuation with increasing decomposition mode, so K = 7 is used.
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tang, Z.; Zhou, C.; Jiang, W. Analysis of Significant Factors on Cable Failure Using the Cox Proportional Hazard Model. IEEE Trans. Power Deliv. 2014, 29, 951–957. [Google Scholar] [CrossRef]
- Bretas, A.S.; Herrera-Orozco, A.R.; Herrera-Orozco, C.A. Incipient fault location method for distribution networks with underground shielded cables: A system identification approach. Int. Trans. Electr. Energy Syst. 2017, 27, e2465. [Google Scholar] [CrossRef]
- Zhang, W.; Xiao, X.; Zhou, K. Multi-Cycle Incipient Fault Detection and Location for Medium Voltage Underground Cable. IEEE Trans. Power Deliv. 2016, 32, 1450–1459. [Google Scholar] [CrossRef]
- Charytoniuk, W.; Lee, W.J.; Chen, M.S. Arcing fault detection in underground distribution networks-feasibility study. IEEE Trans. Ind. Appl. 2000, 36, 1756–1761. [Google Scholar]
- Pavlatos, C.; Vita, V.; Dimopoulos, A.C.; Ekonomou, L. Transmission lines’ fault detection using syntactic pattern recognition. Energy Syst. 2018, 10, 299–320. [Google Scholar] [CrossRef]
- Pavlatos, C.; Vita, V. Linguistic representation of power system signals. In Electricity Distribution; Energy Systems Series; Springer: Berlin/Heidelberg, Germany, 2016; pp. 285–295. [Google Scholar]
- Xu, J.; Baese, U.M.; Huang, K. FPGA-based solution for real-time tracking of time-varying harmonics and power disturbances. Int. J. Power Electron. 2012, 4, 134. [Google Scholar] [CrossRef]
- Romano, P.; Imburgia, A.; Ala, G. Partial Discharge Detection Using a Spherical Electromagnetic Sensor. Sensors 2019, 19, 1014. [Google Scholar] [CrossRef]
- Nuruzzaman, A.; Boyraz, O.; Jalali, B. Time-stretched short-time Fourier transform. IEEE Trans. Instrum. Meas. 2006, 55, 598–602. [Google Scholar] [CrossRef]
- Debnath, L. Wavelet Transforms and Time-Frequency Signal Analysis. Wavelet Transforms and Time-Frequency Signal Analysis; Birkhäuser: Boston, MA, USA, 2001. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-Stationary Time Series Analysis. Proc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Cheng, H.; Chen, X.; Liu, F.; Wang, C. Series Arc Fault Detection and Implementation Based on the Short-time Fourier Transform. In Proceedings of the Asia-Pacific Power and Energy Engineering Conference, Chengdu, China, 28–31 March 2010. [Google Scholar]
- Sidhu, T.S.; Xu, Z. Detection of Incipient Faults in Distribution Underground Cables. IEEE Trans. Power Deliv. 2010, 25, 1363–1371. [Google Scholar] [CrossRef]
- Zhang, C.; Kang, X.N.; Ma, X.D. On-line Incipient Faults Detection in Underground Cables Based on Single-end Sheath Currents. In Proceedings of the Power & Energy Engineering Conference, Suzhou, China, 15–17 April 2016. [Google Scholar]
- Gu, F.C.; Chang, H.C.; Chen, F.H. Application of the Hilbert-Huang transform with fractal feature enhancement on partial discharge recognition of power cable joints. IET Sci. Meas. Technol. 2012, 6, 440–448. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Zhang, J.; He, J.; Long, J.; Yao, M.; Zhou, W. A New Denoising Method for UHF PD Signals Using Adaptive VMD and SSA-Based Shrinkage Method. Sensors 2019, 19, 1594. [Google Scholar] [CrossRef] [PubMed]
- Achlerkar, P.D.; Samantaray, S.R.; Manikandan, M.S. Variational Mode Decomposition and Decision Tree Based Detection and Classification of Power Quality Disturbances in Grid-Connected Distributed Generation System. IEEE Trans. Smart Grid 2018, 9, 3122–3132. [Google Scholar] [CrossRef]
- Voumvoulakis, E.M.; Gavoyiannis, A.E.; Hatziargyriou, N.D. Application of Machine Learning on Power System Dynamic Security Assessment. In Proceedings of the International Conference on Intelligent Systems Applications to Power Systems, Taiwan, China, 5–8 November 2007. [Google Scholar]
- Tang, J.; Jin, M.; Zeng, F.; Zhou, S.; Zhang, X.; Yang, Y.; Ma, Y. Feature Selection for Partial Discharge Severity Assessment in Gas-Insulated Switchgear Based on Minimum Redundancy and Maximum Relevance. Energies 2017, 10, 1516. [Google Scholar] [CrossRef]
- Mas’ud, A.; Albarracín, R.; Ardila-Rey, J.; Muhammad-Sukki, F.; Illias, H.; Bani, N.; Munir, A. Artificial Neural Network Application for Partial Discharge Recognition: Survey and Future Directions. Energies 2016, 9, 574. [Google Scholar] [CrossRef]
- Mas’ud, A.; Ardila-Rey, J.; Albarracín, R.; Muhammad-Sukki, F.; Bani, N. Comparison of the Performance of Artificial Neural Networks and Fuzzy Logic for Recognizing Different Partial Discharge Sources. Energies 2017, 10, 1060. [Google Scholar] [CrossRef]
- Parrado-Hernández, E.; Robles, G.; Ardila-Rey, J.; Martínez-Tarifa, J. Robust Condition Assessment of Electrical Equipment with One Class Support Vector Machines Based on the Measurement of Partial Discharges. Energies 2018, 11, 486. [Google Scholar] [CrossRef]
- Shan, S. Decision Tree Learning. In Machine Learning Models and Algorithms for Big Data Classification; Springer: New York, NY, USA, 2016; pp. 237–269. [Google Scholar]
- Zhang, S.; Wang, Y.; Liu, M. Data-based Line Trip Fault Prediction in Power Systems Using LSTM Networks and SVM. IEEE Access 2017, 6, 7675–7686. [Google Scholar] [CrossRef]
- Cai, L.; Thornhill, N.; Kuenzel, S. Real-time Detection of Power System Disturbances Based on k-Nearest Neighbor Analysis. IEEE Access 2017, 5, 5631–5639. [Google Scholar] [CrossRef]
- Maryam, M.N.; Flavio, V.; Taghi, M.K. Deep learning applications and challenges in big data analytics. J. Big Data 2015, 2, 1. [Google Scholar] [Green Version]
- Wang, Y.; Liu, M.; Bao, Z. Deep learning neural network for power system fault diagnosis. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016. [Google Scholar]
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2014, 18, 1527–1554. [Google Scholar] [CrossRef]
- Zhou, G.B.; Wu, J.; Zhang, C.L.; Zhou, Z.H. Minimal gated unit for recurrent neural networks. Int. J. Autom. Comput. 2016, 13, 226–234. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, M.; Nguyen, V.; Yun, S.; Kim, Y. Recurrent Neural Network for Partial Discharge Diagnosis in Gas-Insulated Switchgear. Energies 2018, 11, 1202. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 6, 2278–2324. [Google Scholar] [CrossRef]
- Cheng, J.; Wang, P.S.; Gang, L.I. Recent advances in efficient computation of deep convolutional neural networks. Front. Inf. Technol. Electron. Eng. 2018, 19, 64–77. [Google Scholar] [CrossRef] [Green Version]
- Bertsekas, D.P. Constrained Optimization and Lagrange Multiplier Methods; Academic Press: Cambridge, MA, USA, 1982; p. 104. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Name | Kernel Size | Output Size |
|---|---|---|
| Input layer | 1 × 42 × 1 | |
| Convolutional layer 1 | 1 × 3 | 1 × 40 × 18 |
| Downsampling layer 1 | 1 × 2 | 1 × 20 × 18 |
| Convolutional layer 2 | 1 × 6 | 1 × 15 × 14 |
| Downsampling layer 2 | 1 × 5 | 1 × 3 × 14 |
| Fully connected layer | 1 × 42 × 1 | |
| Output layer | 6 classes |
| Type | The Number of Samples | Training Samples | Test Samples |
|---|---|---|---|
| Subcycle incipient failure | 2800 | 2100 | 700 |
| Multicycle incipient failure | 2800 | 2100 | 700 |
| Normal signal | 2800 | 2100 | 700 |
| Transformer inrush | 2800 | 2100 | 700 |
| Constant impedance | 2800 | 2100 | 700 |
| Capacitor switching | 2800 | 2100 | 700 |
| Preprocessing | CNN Training Time (s) | Classification Accuracy (%) |
|---|---|---|
| Feature extraction based on VMD | 902.50 | 96.1 |
| The original signals | 8873.96 | 98.6 |
| Methods | Classification Accuracy (%) | ||
|---|---|---|---|
| 15 dB | 20 dB | 25 dB | |
| Feature extraction based on VMD + CNN | 83.52 | 89.33 | 93.21 |
| The original signals + CNN | 16.88 | 65.90 | 82.76 |
| Classifiers | Accuracy (%) |
|---|---|
| Feature extraction based on VMD + DT | 85.31 |
| Feature extraction based on VMD + KNN | 93.45 |
| Feature extraction based on VMD + BP | 79.10 |
| Feature extraction based on VMD + SVM | 80.74 |
| Feature extraction based on VMD + CNN (ours) | 96.10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, J.; Zhang, W.; Yang, X. Recognition and Classification of Incipient Cable Failures Based on Variational Mode Decomposition and a Convolutional Neural Network. Energies 2019, 12, 2005. https://doi.org/10.3390/en12102005
Deng J, Zhang W, Yang X. Recognition and Classification of Incipient Cable Failures Based on Variational Mode Decomposition and a Convolutional Neural Network. Energies. 2019; 12(10):2005. https://doi.org/10.3390/en12102005
Chicago/Turabian StyleDeng, Jiaying, Wenhai Zhang, and Xiaomei Yang. 2019. "Recognition and Classification of Incipient Cable Failures Based on Variational Mode Decomposition and a Convolutional Neural Network" Energies 12, no. 10: 2005. https://doi.org/10.3390/en12102005