A Study on the Effect of Closed-Loop Wind Farm Control on Power and Tower Load in Derating the TSO Command Condition


Abstract
:1. Introduction
2. Wind Farm Modeling and Simulation
2.1. Wind Farm Simulation Code
2.1.1. Wind Turbine Model
2.1.2. Wake Model
2.1.3. Wake Deflection Model
2.1.4. Wind Propagation with Time Delay
2.1.5. Terrain Modeling
2.1.6. Wind Farm Modeling
2.2. Wind Farm Controller
2.3. Wind Farm Simulation
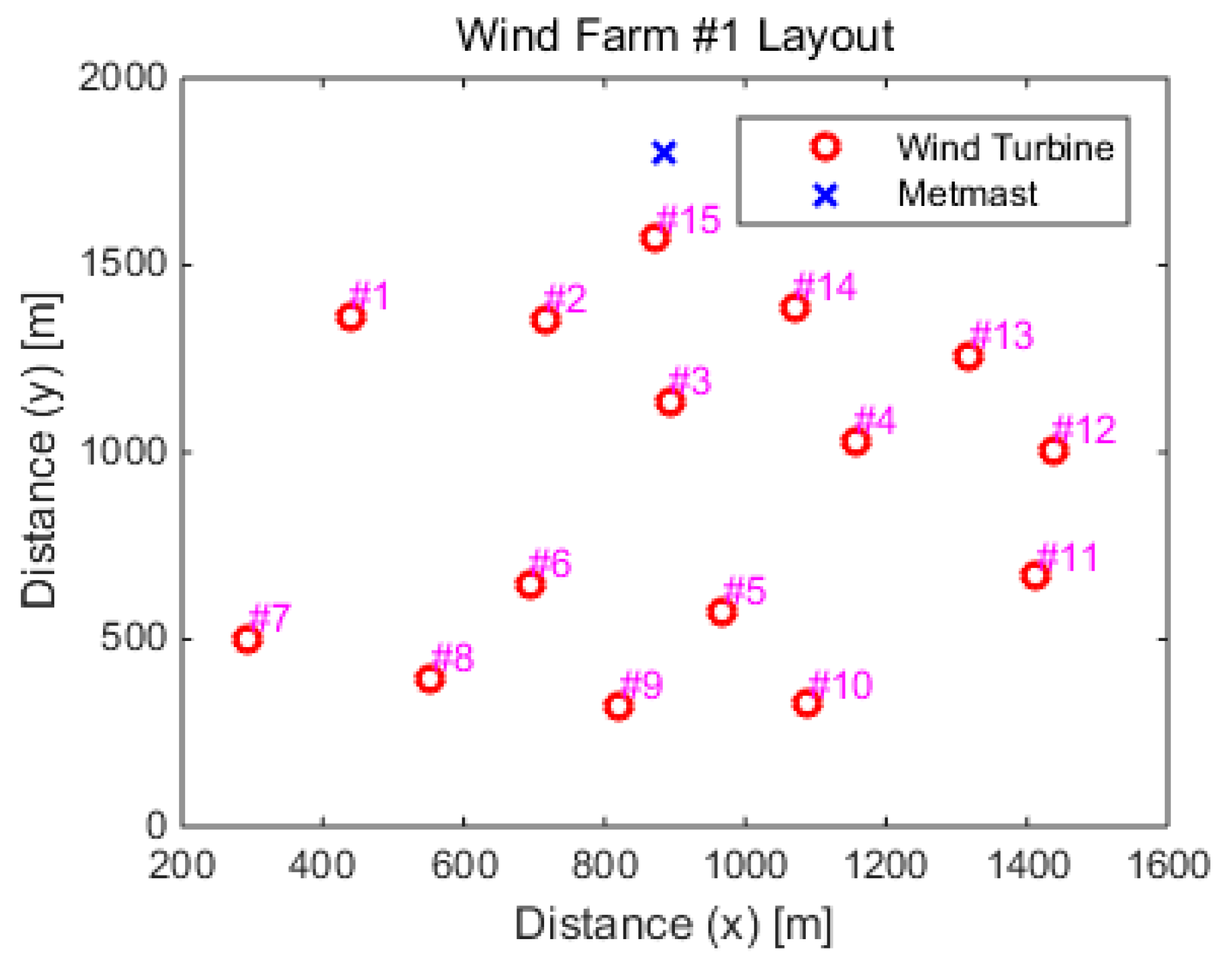
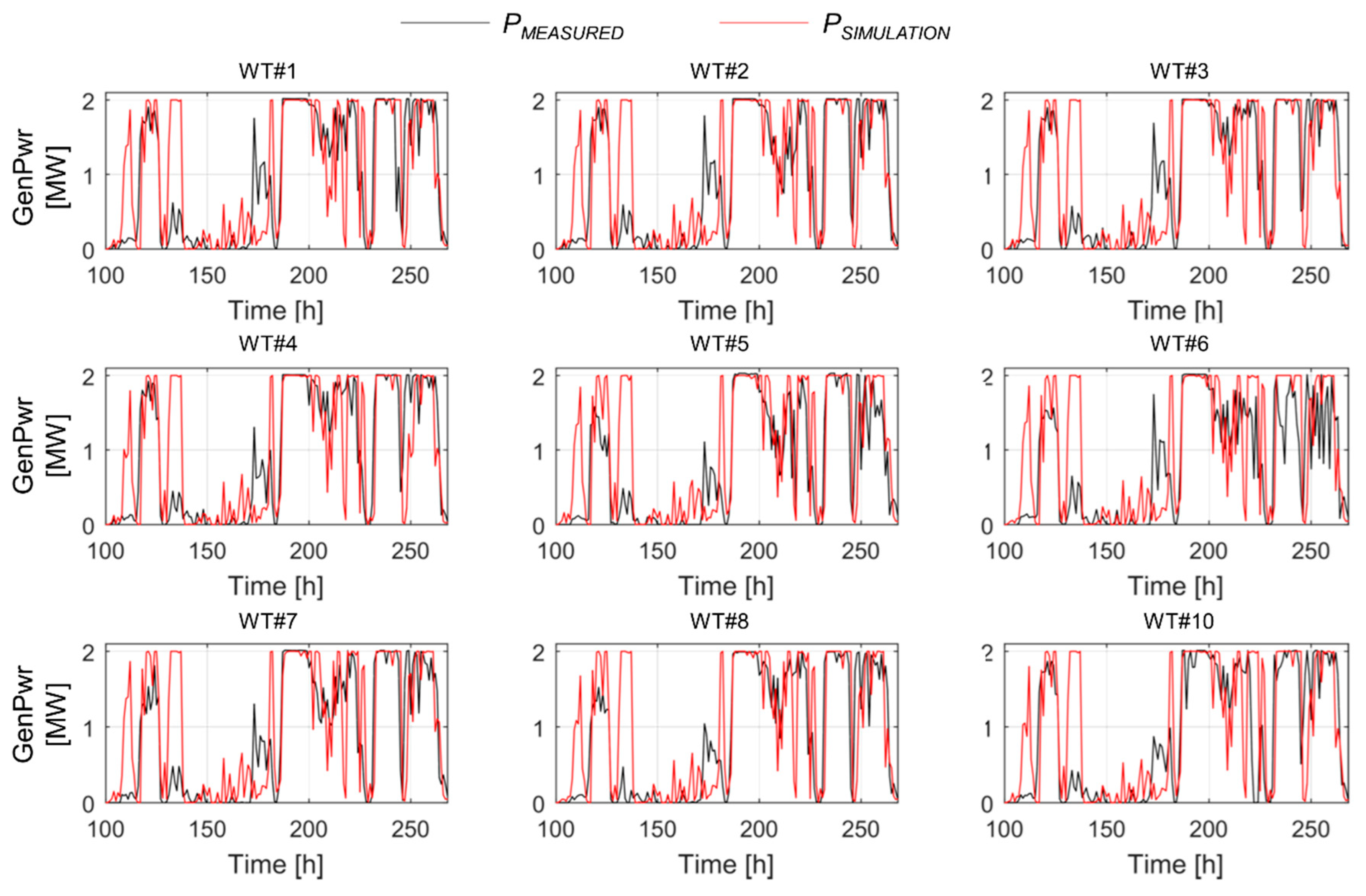
2.3.1. Wind Farm Simulation In-House Code Validation
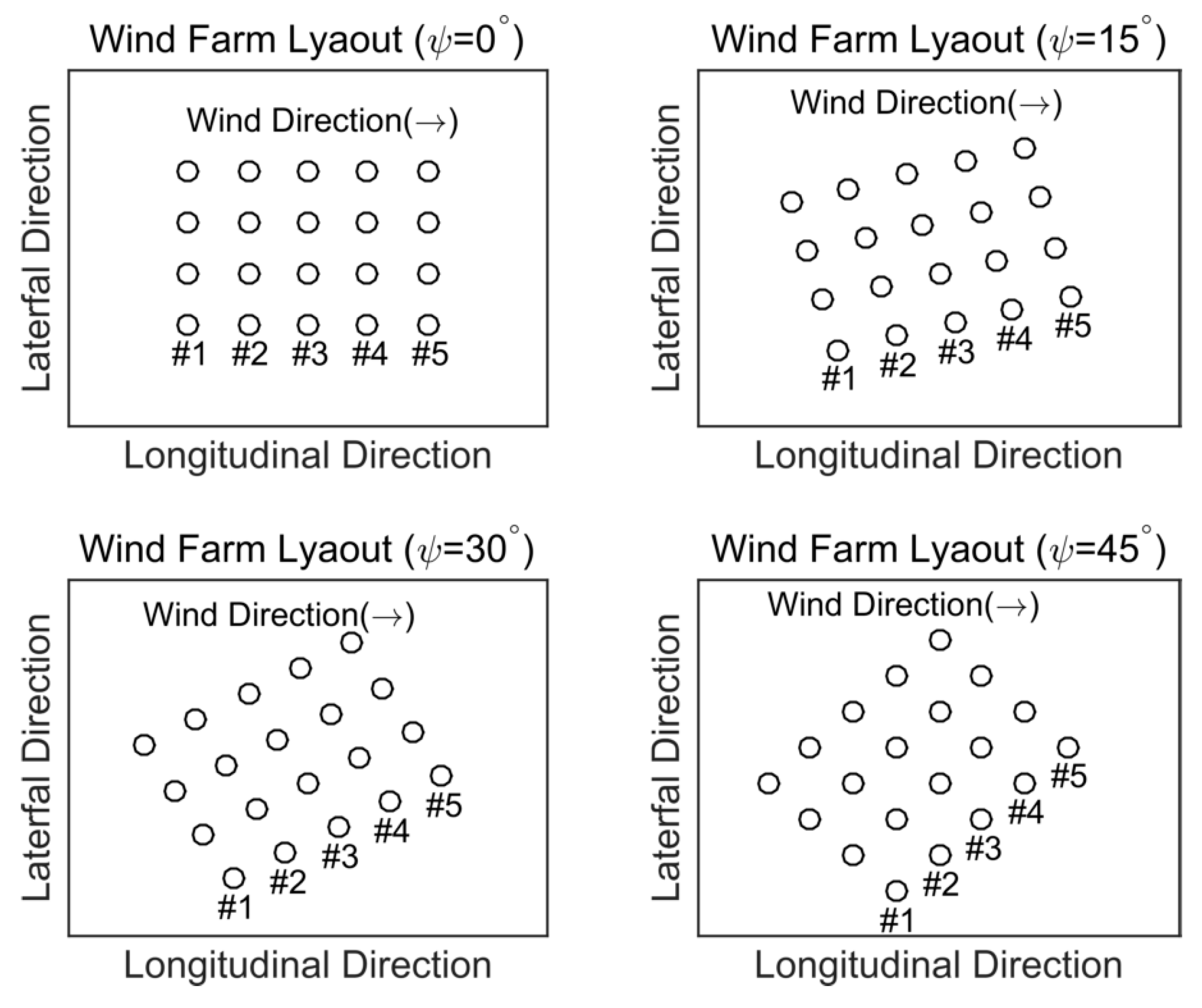
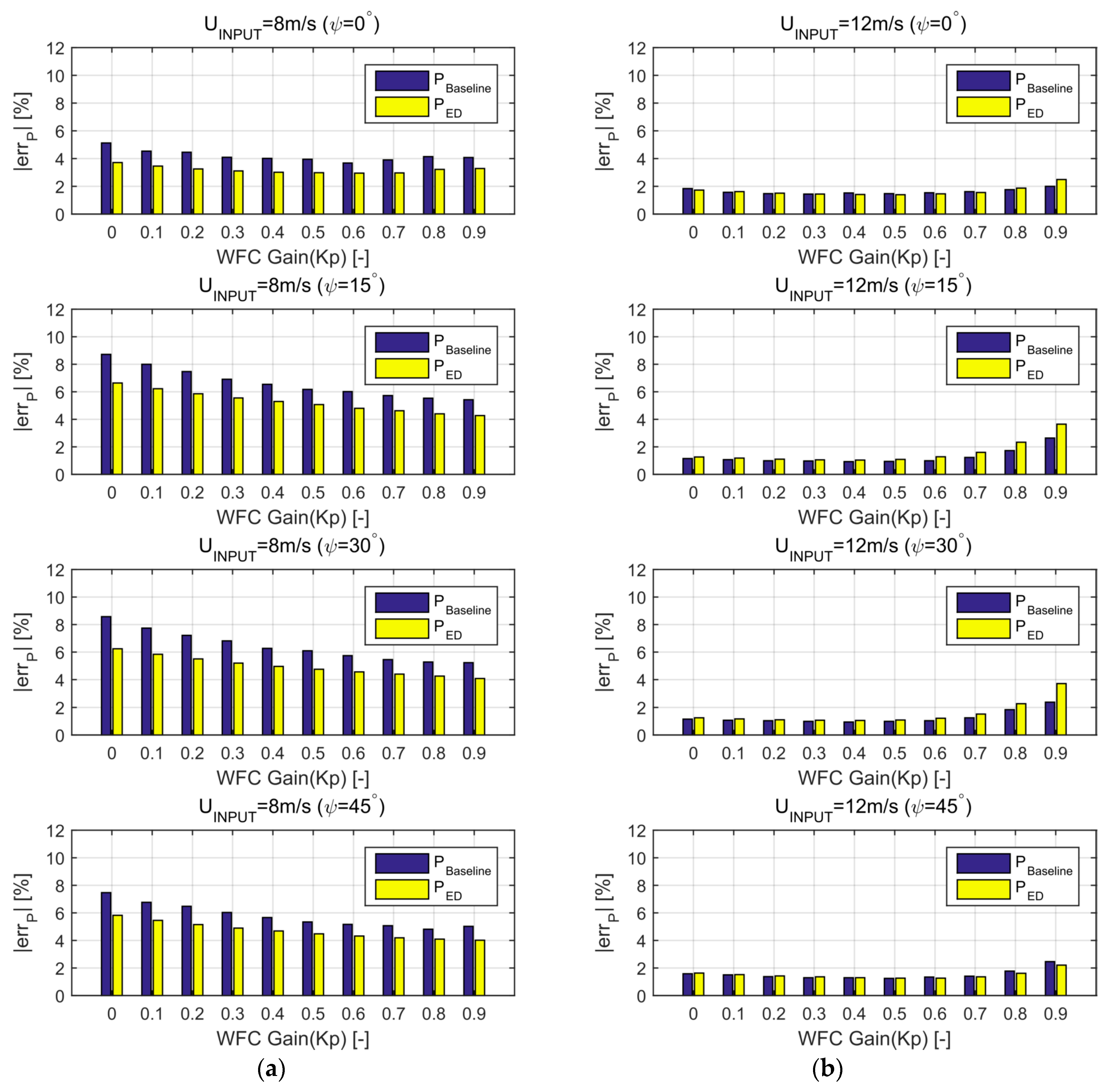
2.3.2. Wind Farm Simulation
3. Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- GWEC. Global Wind Report Annual Market Update 2017; Global Wind Energy Council: Brussels, Belgium, 2018. [Google Scholar]
- IRENA. Renewable Power Generation Costs in 2017; International Renewable Energy Agency: Abu Dhabi, UAE, 2018. [Google Scholar]
- Chowdhury, S.; Zhang, J.; Messac, A.; Castillo, L. Unrestricted wind farm layout optimization (UWFLO): Investigating key factors influencing the maximum power generation. Renew. Energy 2012, 38, 16–30. [Google Scholar] [CrossRef]
- Fleming, P.A.; Ning, A.; Gebraad, P.M.O.; Dykes, K. Wind plant system engineering through optimization of layout and yaw control. Wind Energy 2016, 19, 329–344. [Google Scholar] [CrossRef]
- Shakoor, R.; Hassan, M.Y.; Raheem, A.; Wu, Y. Wake effect modeling: A review of wind farm layout optimization using Jensen’s model. Renew. Sustain. Energy Rev. 2016, 58, 1048–1059. [Google Scholar] [CrossRef]
- Gustave, P.C.; Pieter, S. Heat and flux: Increase of wind farm production by reduction of the axial induction. In Proceedings of the European Wind Energy Conference, Madrid, Spain, 16–19 June 2003. [Google Scholar]
- Corten, G.P.; Schaak, P. More power and less loads in wind farms. In Proceedings of the European Wind Energy Conference, London, UK, 22–25 November 2004. [Google Scholar]
- Machielse, L.A.H.; Barth, S.; Bot, E.T.G.; Hendriks, H.B.; Schepers, G.J. Evaluation of ‘Heat and Flux’ Farm Control; Technical Report ECN-E–07-105; Energy Research Centre of the Netherlands: Sint Maartensvlotbrug, The Netherlands, 2007. [Google Scholar]
- Kim, H.; Kim, K.; Paek, I. Power regulation of upstream wind turbines for power increase in a wind farm. Int. J. Precis. Eng. Manuf. 2016, 17, 665–670. [Google Scholar] [CrossRef]
- Kim, H.; Kim, K.; Paek, I. Model based open-loop wind farm control using active power for power increase and load reduction. Appl. Sci. 2017, 7, 1068. [Google Scholar] [CrossRef]
- Fleming, P.A.; Gebraad, P.M.; Lee, S.; van Wingerden, J.W.; Johnson, K.; Churchfield, M.; Michalakes, J.; Spalart, P.; Moriarty, P. Evaluating techniques for redirecting turbine wakes using SOWFA. Renew. Energy 2014, 70, 211–218. [Google Scholar] [CrossRef]
- Gebraad, P.; Teeuwisse, F.; Wingerden, J.; Fleming, P.A.; Ruben, S.; Marden, J.; Pao, L. Wind plant power optimization through yaw control using a parametric model for wake effects—A CFD simulation study. Wind Energy 2016, 19, 95–114. [Google Scholar] [CrossRef]
- Quick, J.; Annoni, J.; King, R.; Dykes, K.; Fleming, P.; Ning, A. Optimization under Uncertainty for Wake Steering Strategies. J. Phys. Conf. Ser. 2017, 854, 012036. [Google Scholar] [CrossRef]
- Fleming, P.; Annon, J.; Shah, J.J.; Wang, L.; Ananthan, S.; Zhang, Z.; Hutchings, K.; Wang, P.; Chen, W.; Chen, L. Field test of wake steering at an offshore wind farm. Wind Energy Sci. 2017, 2, 229–239. [Google Scholar] [CrossRef] [Green Version]
- Raach, S.; Boersma, S.; van Wingerden, J.; Schlipf, D.; Cheng, P.W. Robust lidar-based closed-loop wake redirection for wind farm control. IFAC-PapersOnLine 2017, 50, 4498–4503. [Google Scholar] [CrossRef]
- Kanev, S.; Savenije, F.; Soleimanzadeh, M.; Wiggelinkhulzen, E. Wind Farm Modeling and Control: Inventory; ECN Technical Report; ECN-E-13-058; Energy Research Centre of the Netherlands: Sint Maartensvlotbrug, The Netherlands, 2013. [Google Scholar]
- Ketterer, J.C. The impact of wind power generation on the electricity price in Germany. Energy Econ. 2014, 44, 270–280. [Google Scholar] [CrossRef] [Green Version]
- Kristoffersen, J.R.; Christiansen, P. Horns Rev offshore wind-farm: Its main controller and remote control system. Wind Eng. 2003, 27, 351–359. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, Q.; Guo, Q.; Sun, H.; Xue, Y. Distributed model predictive control of a wind farm for optimal active power control Part II: Implementation with clustering based piece-wise affine wind turbine model. IEEE Trans. Sustain. Energy 2015, 6, 840–849. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, Q.; Huang, S.; Shahidehpour, M.; Guo, Q.; Sun, H. Fatigue load sensitivity-based optimal active power dispatch for wind farms. IEEE Trans. Sustain. Energy 2017, 8, 1247–1259. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, Y.; Tian, D.; Yan, J. Optimal power dispatch in wind farm based on reduced blade damage and generator losses. Renew. Sustain. Energy Rev. 2015, 44, 64–77. [Google Scholar] [CrossRef]
- Guo, Y.; Gao, H.; Wu, Q.; Østergaard, J.; Yu, D.; Shahidehpour, M. Distributed coordinated active and reactive power control of wind farms based on model predictive control. Electr. Power Energy Syst. 2019, 104, 78–88. [Google Scholar] [CrossRef] [Green Version]
- Boersma, S.; Doekemeijer, B.M.; Siniscalchi-Minna, S.; van Wingerden, J.W. A constrained wind farm controller providing secondary frequency regulation: An LES Study. Renew. Energy 2019, 134, 639–652. [Google Scholar] [CrossRef]
- Jacob, D.G.; Soltani, M.N.; Torben, K.; Martin, N.K.; Thomas, B. Aeolus toolbox for dynamics wind farm model, simulation and control. In Proceedings of the European Wind Energy Conference and Exhibition (EWEC) 2010, Warsaw, Poland, 20–23 April 2010; European Wind Energy Association (EWEA): Warsaw, Poland, 2010. [Google Scholar]
- Kim, H.; Kim, K.; Paek, I.; Yoo, N. Development of a time-domain simulation tool for offshore wind farms. J. Power Electron. 2015, 15, 1047–1053. [Google Scholar] [CrossRef]
- Kim, H.; Kim, K.; Bottasso, C.L.; Campagnolo, F.; Paek, I. Wind turbine wake characterization for improvement of the Ainslie eddy viscosity wake model. Energies 2018, 11, 2823. [Google Scholar] [CrossRef]
- Kim, K.; Kim, H.; Kim, C.; Paek, I.; Bottasso, C.L.; Campagnolo, F. Design and validation of demanded power point tracking control algorithm of wind turbine. Int. J. Precis. Eng. Manuf. Green Technol. 2018, 5, 387–400. [Google Scholar] [CrossRef]
- Ainslie, J.F. Calculating the flowfield in the wake of wind turbine. J. Wind Eng. Ind. Aerodyn. 1988, 27, 213–224. [Google Scholar]
- Jiménez, A.; Crespo, A.; Migoya, E. Application of a LES technique to characterize the wake deflection of a wind turbine in yaw. Wind Energy 2010, 13, 559–572. [Google Scholar] [CrossRef]
- Gebraad, P.M.O.; van Wingerden, J.W. Maximum power-point tracking control for wind farms. Wind Energy 2015, 18, 429–447. [Google Scholar] [CrossRef]
- Per, N.; Jens, V.; Jon, K.; Per, M.; Thomas, J.; Morten, L.T.; Mads, V.S.; Thoas, S.; Lasse, S.; Mauricio, M.; et al. WindPRO User Guide; EMD International A/S: Aalborg, Denmark, 2012. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report NREL/TP-500-38060; National Renewable Energy Laboratory: Golden, CO, USA, 2009.
- 4C Offshore. 2014. Available online: www.4coffshore.com/windfarms (accessed on 4 January 2018).
- Kim, K.; Lim, C.; Oh, Y.; Kwon, I.; Yoo, N.; Paek, I. Time-domain dynamic simulation of a wind turbine including yaw motion for power prediction. Int. J. Precis. Eng. Manuf. 2015, 15, 2199–2203. [Google Scholar]
- Singh, M.; Santoso, S. Dynamic Models for Wind Turbines and Wind Power Plants; Subcontract Report NREL/SR-5500-52780; National Renewable Energy Laboratory: Golden, CO, USA, 2011.
- Hansen, A.D.; Sørensen, P.; Iov, F.; Blaabjerg, F. Centralised power control of wind farm with doubly fed induction generators. Renew. Energy 2006, 31, 935–951. [Google Scholar]
- Guan, X.; Molen, G.M. Aeolus Project Deliverable d3.1: Control Strategy Review and Specification (Part 1); Technical Report; Industrial Systems and Control, Applied Control Technology Consortium, Industrial Systems and Control Ltd.: Glasgow, Scotland, 2009. [Google Scholar]
- Nam, Y. Wind Turbine System Control, 1st ed.; GS Intervision: Seoul, Korea, 2013; pp. 400–401. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rotor diameter | 126.0 m |
| Hub diameter | 3.0 m |
| Hub height | 90.0 m |
| Cut-in/rated/cut-out wind speed | 3.0/11.4/25.0 m/s |
| Cut-in/rated rotor speed | 6.9/12.1 rpm |
| ID | Error [%] | id | Error [%] |
|---|---|---|---|
| #1 | 2.57 | #9 | 4.59 |
| #2 | 8.95 | #10 | 10.54 |
| #3 | 15.88 | #11 | 8.54 |
| #4 | 16.75 | #12 | 14.43 |
| #5 | 8.52 | #13 | 10.40 |
| #6 | 2.44 | #14 | 7.49 |
| #7 | 7.96 | #15 | 3.19 |
| #8 | 10.53 | AEP | 7.97 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Kim, K.; Paek, I. A Study on the Effect of Closed-Loop Wind Farm Control on Power and Tower Load in Derating the TSO Command Condition. Energies 2019, 12, 2004. https://doi.org/10.3390/en12102004
Kim H, Kim K, Paek I. A Study on the Effect of Closed-Loop Wind Farm Control on Power and Tower Load in Derating the TSO Command Condition. Energies. 2019; 12(10):2004. https://doi.org/10.3390/en12102004
Chicago/Turabian StyleKim, Hyungyu, Kwansu Kim, and Insu Paek. 2019. "A Study on the Effect of Closed-Loop Wind Farm Control on Power and Tower Load in Derating the TSO Command Condition" Energies 12, no. 10: 2004. https://doi.org/10.3390/en12102004