

Leg Muscle Activity and Joint Motion during Balance Exercise Using a Newly Developed Weight-Shifting-Based Robot Control System

Abstract
:1. Introduction
2. Materials and Methods
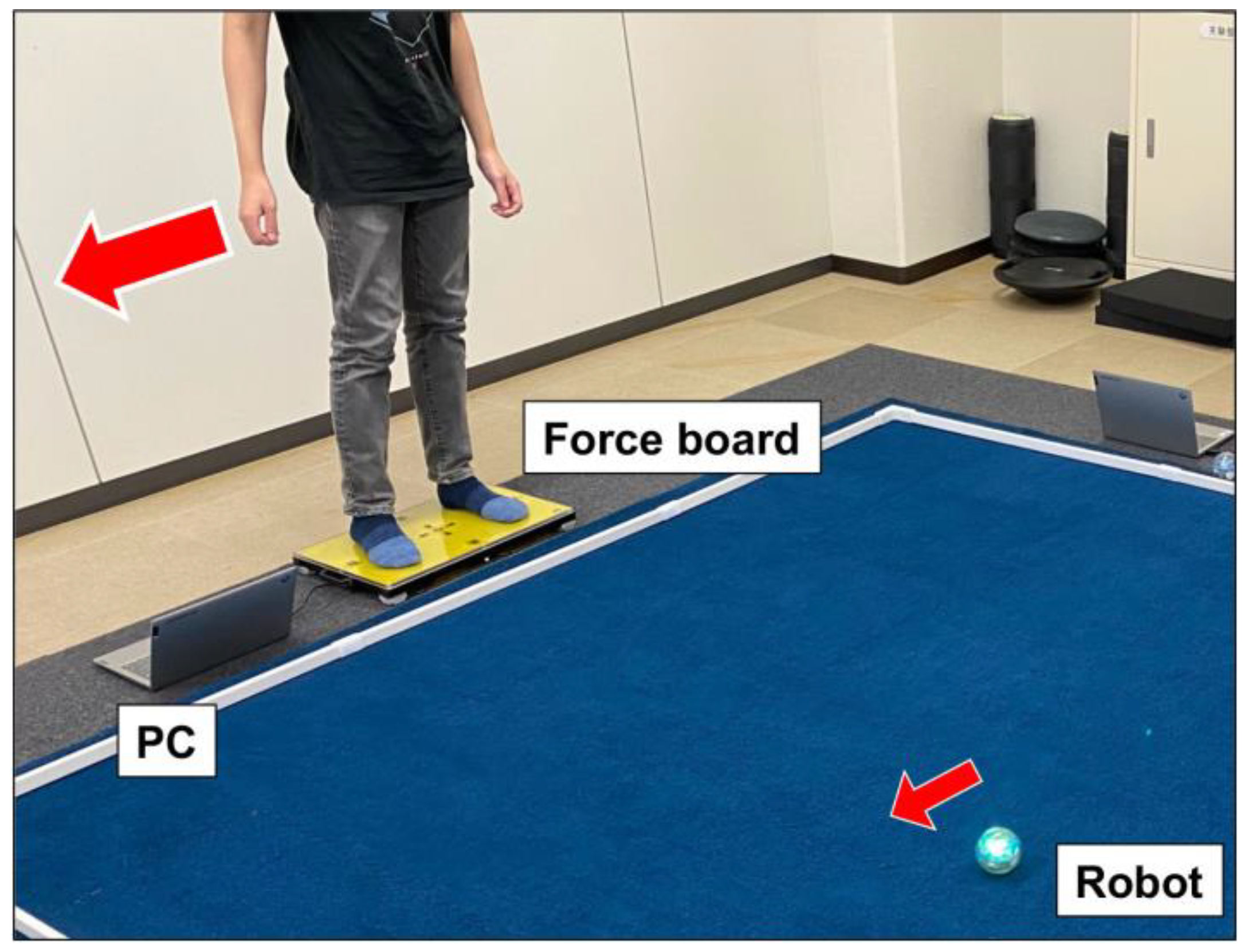
2.1. Weight-Shifting-Based Robot Control System
2.2. Participants
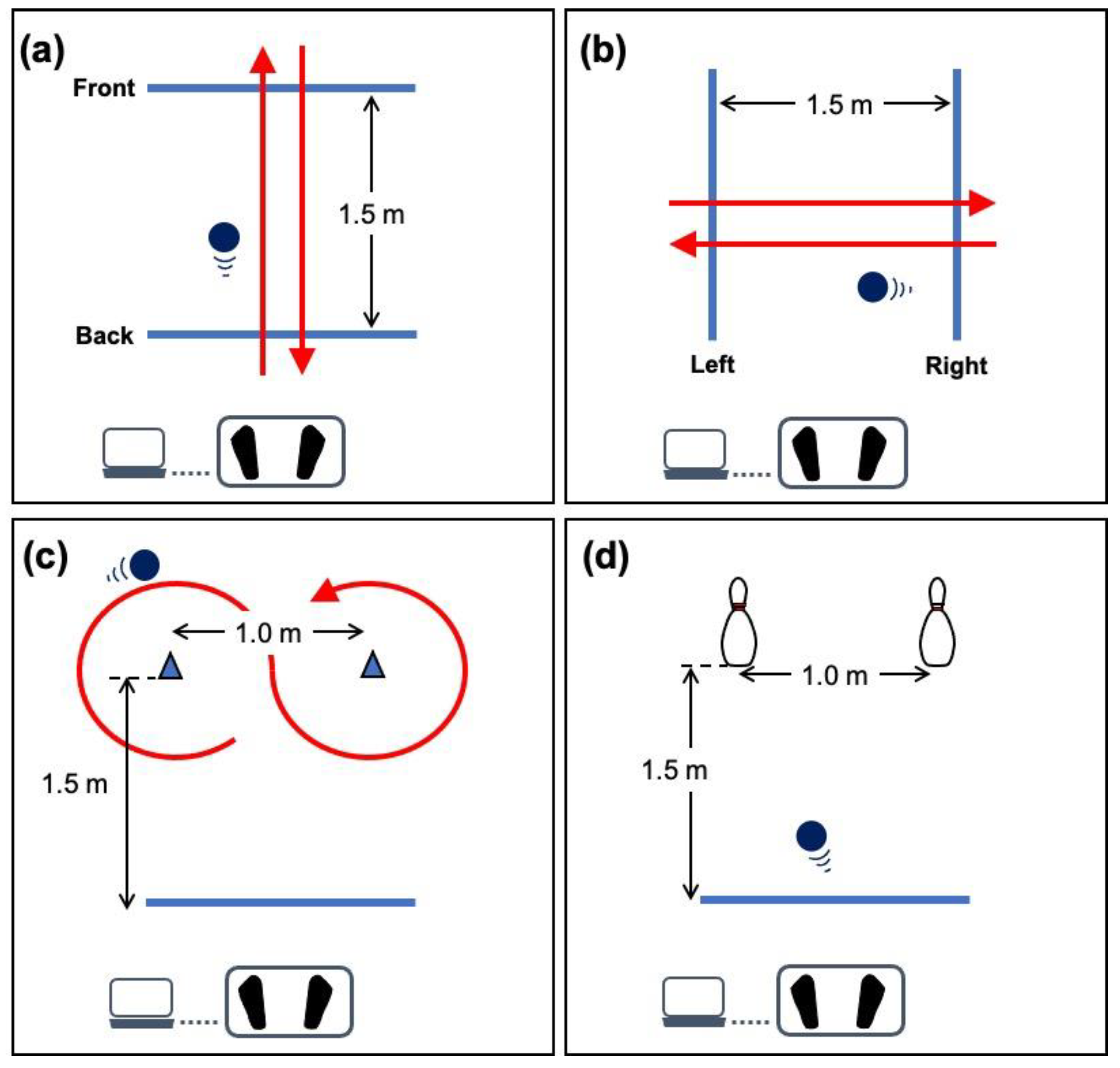
2.3. LOCOBOT Exercise
2.4. Electromyography (EMG) and Processing
2.5. Motion Tracking and Joint Movement Analysis
2.6. Statistical Analysis
3. Results
3.1. Muscle Activity
3.1.1. Comparison among LOCOBOT Exercises
3.1.2. Comparison of 8-Turn LOCOBOT Exercise to Walking and Sit-to-Stand Motion
3.2. Joint Motion during LOCOBOT Exercise
3.2.1. ROM
3.2.2. TAD
4. Discussion
4.1. Muscle Activity and Joint Movement during LOCOBOT Exercise
4.2. Comparison of 8-Turn LOCOBOT Exercise with Walking and Sit-to-Stand
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Horak, F.B. Postural orientation and equilibrium: What do we need to know about neural control of balance to prevent falls? Age Ageing 2006, 35 (Suppl. S2), ii7–ii11. [Google Scholar] [CrossRef] [Green Version]
- Pollock, A.S.; Durward, B.R.; Rowe, P.J.; Paul, J.P. What is balance? Clin. Rehabil. 2000, 14, 402–406. [Google Scholar] [CrossRef]
- Tinetti, M.E.; Speechley, M.; Ginter, S.F. Risk factors for falls among elderly persons living in the community. N. Engl. J. Med. 1988, 319, 1701–1707. [Google Scholar] [CrossRef]
- Gill, T.; Taylor, A.W.; Pengelly, A. A population-based survey of factors relating to the prevalence of falls in older people. Gerontology 2005, 51, 340–345. [Google Scholar] [CrossRef]
- Sterling, D.A.; O’Connor, J.A.; Bonadies, J. Geriatric falls: Injury severity is high and disproportionate to mechanism. J. Trauma 2001, 50, 116–119. [Google Scholar] [CrossRef]
- Ashburn, A.; Hyndman, D.; Pickering, R.; Yardley, L.; Harris, S. Predicting people with stroke at risk of falls. Age Ageing 2008, 37, 270–276. [Google Scholar] [CrossRef] [Green Version]
- El-Shamy, S.M.; Abd El Kafy, E.M. Effect of balance training on postural balance control and risk of fall in children with diplegic cerebral palsy. Disabil. Rehabil. 2014, 36, 1176–1183. [Google Scholar] [CrossRef]
- Johnell, O.; Melton, L.J., 3rd; Atkinson, E.J.; O’Fallon, W.M.; Kurland, L.T. Fracture risk in patients with parkinsonism: A population-based study in Olmsted County, Minnesota. Age Ageing 1992, 21, 32–38. [Google Scholar] [CrossRef]
- Mocanu, G.D.; Murariu, G.; Onu, I.; Badicu, G. The Influence of Gender and the Specificity of Sports Activities on the Performance of Body Balance for Students of the Faculty of Physical Education and Sports. Int. J. Environ. Res. Public Health 2022, 19, 7672. [Google Scholar] [CrossRef]
- Van Diest, M.; Lamoth, C.J.; Stegenga, J.; Verkerke, G.J.; Postema, K. Exergaming for balance training of elderly: State of the art and future developments. J. Neuroeng. Rehabil. 2013, 10, 101. [Google Scholar] [CrossRef]
- Goble, D.J.; Cone, B.L.; Fling, B.W. Using the Wii Fit as a tool for balance assessment and neurorehabilitation: The first half decade of “Wii-search”. J. Neuroeng. Rehabil. 2014, 11, 12. [Google Scholar] [CrossRef] [Green Version]
- Yamako, G.; Chosa, E.; Totoribe, K.; Fukao, Y.; Deng, G. Quantification of the sit-to-stand movement for monitoring age-related motor deterioration using the Nintendo Wii Balance Board. PLoS ONE 2017, 12, e0188165. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Xing, Y.; Wu, Y. Effect of Wii Fit Exercise With Balance and Lower Limb Muscle Strength in Older Adults: A Meta-Analysis. Front. Med. 2022, 9, 812570. [Google Scholar] [CrossRef]
- Rendon, A.A.; Lohman, E.B.; Thorpe, D.; Johnson, E.G.; Medina, E.; Bradley, B. The effect of virtual reality gaming on dynamic balance in older adults. Age Ageing 2012, 41, 549–552. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karasu, A.U.; Batur, E.B.; Karatas, G.K. Effectiveness of Wii-based rehabilitation in stroke: A randomized controlled study. J. Rehabil. Med. 2018, 50, 406–412. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Montoro-Cardenas, D.; Cortes-Perez, I.; Zagalaz-Anula, N.; Osuna-Perez, M.C.; Obrero-Gaitan, E.; Lomas-Vega, R. Nintendo Wii Balance Board therapy for postural control in children with cerebral palsy: A systematic review and meta-analysis. Dev. Med. Child Neurol. 2021. [Google Scholar] [CrossRef]
- Mhatre, P.V.; Vilares, I.; Stibb, S.M.; Albert, M.V.; Pickering, L.; Marciniak, C.M.; Kording, K.; Toledo, S. Wii Fit balance board playing improves balance and gait in Parkinson disease. PM&R 2013, 5, 769–777. [Google Scholar] [CrossRef] [Green Version]
- SENIAM. Available online: http://www.seniam.org (accessed on 14 December 2022).
- Chuang, T.D.; Acker, S.M. Comparing functional dynamic normalization methods to maximal voluntary isometric contractions for lower limb EMG from walking, cycling and running. J. Electromyogr. Kinesiol. 2019, 44, 86–93. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krommes, K.; Bandholm, T.; Jakobsen, M.D.; Andersen, L.L.; Serner, A.; Holmich, P.; Thorborg, K. Dynamic Hip Adduction, Abduction and Abdominal Exercises from the Holmich Groin-Injury Prevention Program Are Intense Enough to Be Considered Strengthening Exercises—A Cross-Sectional Study. Int. J. Sport. Phys. Ther. 2017, 12, 371–380. [Google Scholar]
- Reid, D.; McNair, P.J.; Johnson, S.; Potts, G.; Witvrouw, E.; Mahieu, N. Electromyographic analysis of an eccentric calf muscle exercise in persons with and without Achilles tendinopathy. Phys. Ther. Sport 2012, 13, 150–155. [Google Scholar] [CrossRef]
- Ruiz Munoz, M.; Gonzalez-Sanchez, M.; Cuesta-Vargas, A.I. Tibialis anterior analysis from functional and architectural perspective during isometric foot dorsiflexion: A cross-sectional study of repeated measures. J. Foot Ankle Res. 2015, 8, 74. [Google Scholar] [CrossRef]
- Selkowitz, D.M.; Beneck, G.J.; Powers, C.M. Which exercises target the gluteal muscles while minimizing activation of the tensor fascia lata? Electromyographic assessment using fine-wire electrodes. J. Orthop. Sport. Phys. Ther. 2013, 43, 54–64. [Google Scholar] [CrossRef] [PubMed]
- Strom, M.; Thorborg, K.; Bandholm, T.; Tang, L.; Zebis, M.; Nielsen, K.; Bencke, J. Ankle Joint Control during Single-Legged Balance Using Common Balance Training Devices—Implications for Rehabilitation Strategies. Int. J. Sports Phys. Ther. 2016, 11, 388–399. [Google Scholar] [PubMed]
- Kadaba, M.P.; Ramakrishnan, H.K.; Wootten, M.E. Measurement of lower extremity kinematics during level walking. J. Orthop. Res. Off. Publ. Orthop. Res. Soc. 1990, 8, 383–392. [Google Scholar] [CrossRef] [PubMed]
- Full Body Modeling with Plug-In Gait. Available online: https://docs.vicon.com/display/Nexus213/Full+body+modeling+with+Plug-in+Gait (accessed on 14 December 2022).
- Miyazaki, S.; Yamako, G.; Totoribe, K.; Sekimoto, T.; Kadowaki, Y.; Tsuruta, K.; Chosa, E. Shadow pitching deviates ball release position: Kinematic analysis in high school baseball pitchers. BMC Sport. Sci. Med. Rehabil. 2021, 13, 26. [Google Scholar] [CrossRef]
- Faul, F.; Erdfelder, E.; Lang, A.G.; Buchner, A. G*Power 3: A flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behav. Res. Methods 2007, 39, 175–191. [Google Scholar] [CrossRef] [PubMed]
- Gatev, P.; Thomas, S.; Kepple, T.; Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. J. Physiol. 1999, 514 Pt 3, 915–928. [Google Scholar] [CrossRef] [PubMed]
- Blenkinsop, G.M.; Pain, M.T.G.; Hiley, M.J. Balance control strategies during perturbed and unperturbed balance in standing and handstand. R. Soc. Open Sci. 2017, 4, 161018. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Lee, D.; Lee, S. Effect of virtual reality exercise using the nintendo wii fit on muscle activities of the trunk and lower extremities of normal adults. J. Phys. Ther. Sci. 2014, 26, 271–273. [Google Scholar] [CrossRef] [Green Version]
- Miyazaki, S.; Yamako, G.; Arakawa, H.; Sakamoto, T.; Kawaguchi, T.; Ito, K.; Chosa, E. Weight-shifting-based robot control system improves the weight-bearing rate and balance ability of the static standing position in hip osteoarthritis patients: A randomized controlled trial focusing on outcomes after total hip arthroplasty. PeerJ 2023. now submitting. [Google Scholar]
- Kasahara, S.; Saito, H.; Anjiki, T.; Osanai, H. The effect of aging on vertical postural control during the forward and backward shift of the center of pressure. Gait Posture 2015, 42, 448–454. [Google Scholar] [CrossRef]
- Schulleri, K.H.; Johannsen, L.; Michel, Y.; Lee, D. Sex differences in the association of postural control with indirect measures of body representations. Sci. Rep. 2022, 12, 4556. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
| Muscle | Front–Back | Left–Right | 8-Turn | Bowling | p-Value (Kruskal–Wallis Test) |
|---|---|---|---|---|---|
| Tibialis anterior | 8.3 ± 3.2 | 2.8 ± 2.1 | 6.4 ± 2.1 | 1.5 ± 0.7 | <0.001 ** |
| Peroneus longus | 4.7 ± 1.6 | 3.5 ± 1.4 | 4.2 ± 1.3 | 5.4 ± 1.8 | 0.104 |
| Soleus | 7.1 ± 2.6 | 6.3 ± 2.2 | 6.3 ± 2.2 | 9.5 ± 2.9 | 0.038 * |
| Gastrocnemius lateralis | 2.6 ± 0.8 | 2.6 ± 1.9 | 2.3 ± 0.7 | 4.6 ± 2.1 | 0.003 ** |
| Gastrocnemius medialis | 5.8 ± 3.3 | 4.5 ± 2.8 | 5.1 ± 2.9 | 8.1 ± 6.2 | 0.709 |
| Vastus lateralis | 11.8 ± 7.5 | 6.8 ± 7.6 | 10.8 ± 8.0 | 6.4 ± 7.8 | 0.017 * |
| Vastus medialis | 5.3 ± 3.8 | 2.8 ± 3.5 | 4.8 ± 3.8 | 3.1 ± 3.9 | 0.025 * |
| Rectus femoris | 4.7 ± 2.4 | 2.4 ± 2.1 | 4.1 ± 2.8 | 2.3 ± 2.4 | 0.013 * |
| Biceps femoris | 2.4 ± 1.8 | 2.3 ± 1.7 | 3.1 ± 1.8 | 2.4 ± 2.3 | 0.520 |
| Semitendinosus | 6.0 ± 2.0 | 4.7 ± 2.6 | 5.9 ± 2.5 | 6.6 ± 3.2 | 0.278 |
| Adductor magnus | 2.2 ± 1.4 | 1.1 ± 0.6 | 2.1 ± 1.5 | 1.4 ± 0.7 | 0.132 |
| Gluteus medius | 1.6 ± 1.1 | 3.1 ± 1.3 | 2.5 ± 1.3 | 2.4 ± 1.2 | 0.062 |
| Gluteus maximus | 1.1 ± 0.7 | 1.2 ± 0.4 | 1.4 ± 0.6 | 1.1 ± 0.5 | 0.657 |
| Muscle | 8-Turn | Walking | Sit-to-Stand | p-Value (Kruskal–Wallis Test) |
|---|---|---|---|---|
| Tibialis anterior | 6.4 ± 2.1 | 5.0 ± 2.0 | 9.4 ± 3.8 | 0.007 ** |
| Peroneus longus | 4.2 ± 1.3 | 6.1 ± 2.8 | 2.7 ± 1.1 | 0.005 ** |
| Soleus | 6.3 ± 2.2 | 7.9 ± 3.7 | 3.4 ± 2.0 | 0.002 ** |
| Gastrocnemius lateralis | 2.3 ± 0.7 | 3.9 ± 1.9 | 1.0 ± 0.5 | <0.001 ** |
| Gastrocnemius medialis | 5.1 ± 2.9 | 8.1 ± 3.0 | 1.3 ± 1.0 | <0.001 ** |
| Vastus lateralis | 10.8 ± 8.0 | 4.7 ± 2.8 | 12.2 ± 5.1 | 0.005 ** |
| Vastus medialis | 4.8 ± 3.8 | 3.2 ± 2.1 | 9.5 ± 5.2 | 0.01 * |
| Rectus femoris | 4.1 ± 2.8 | 1.8 ± 1.1 | 7.3 ± 4.2 | 0.003 ** |
| Biceps femoris | 3.1 ± 1.8 | 2.2 ± 1.4 | 1.4 ± 1.0 | 0.061 |
| Semitendinosus | 5.9 ± 2.5 | 3.0 ± 1.5 | 1.4 ± 0.7 | <0.001 ** |
| Adductor magnus | 2.1 ± 1.5 | 2.8 ± 2.1 | 2.3 ± 1.8 | 0.745 |
| Gluteus medius | 2.5 ± 1.3 | 2.7 ± 1.9 | 2.0 ± 1.1 | 0.784 |
| Gluteus maximus | 1.4 ± 0.6 | 1.4 ± 1.0 | 2.0 ± 1.1 | 0.343 |
| Exercise | Ankle Joint | Knee Joint | Hip Joint | p-Value (One-Way ANOVA) |
|---|---|---|---|---|
| Front–back | 26.2 ± 12.7 | 20.9 ± 16.3 | 23.8 ± 15.8 | 0.737 |
| Left–right | 24.4 ± 11.4 | 17.3 ± 9.7 | 10.5 ± 5.0 | 0.008 ** |
| 8-turn | 45.1 ± 22.0 | 24.6 ± 13.8 | 26.6 ± 17.5 | 0.032 * |
| Bowling | 24.5 ± 10.3 | 18.3 ± 8.9 | 19.3 ± 7.7 | 0.282 |
| Exercise | Ankle Joint | Knee Joint | Hip Joint | p-Value (One-Way ANOVA) |
|---|---|---|---|---|
| Front–back | 26.2 ± 12.7 | 20.9 ± 16.3 | 23.8 ± 15.8 | 0.075 |
| Left–right | 24.4 ± 11.4 | 17.3 ± 9.7 | 10.5 ± 5.0 | 0.007 ** |
| 8-turn | 45.1 ± 22.0 | 24.6 ± 13.8 | 26.6 ± 17.5 | 0.18 |
| Bowling | 24.5 ± 10.3 | 18.3 ± 8.9 | 19.3 ± 7.7 | 0.193 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamako, G.; Ito, K.; Muraoka, T.; Chosa, E. Leg Muscle Activity and Joint Motion during Balance Exercise Using a Newly Developed Weight-Shifting-Based Robot Control System. Int. J. Environ. Res. Public Health 2023, 20, 915. https://doi.org/10.3390/ijerph20020915
Yamako G, Ito K, Muraoka T, Chosa E. Leg Muscle Activity and Joint Motion during Balance Exercise Using a Newly Developed Weight-Shifting-Based Robot Control System. International Journal of Environmental Research and Public Health. 2023; 20(2):915. https://doi.org/10.3390/ijerph20020915
Chicago/Turabian StyleYamako, Go, Kirari Ito, Takanori Muraoka, and Etsuo Chosa. 2023. "Leg Muscle Activity and Joint Motion during Balance Exercise Using a Newly Developed Weight-Shifting-Based Robot Control System" International Journal of Environmental Research and Public Health 20, no. 2: 915. https://doi.org/10.3390/ijerph20020915