


Communication Delay Outlier Detection and Compensation for Teleoperation Using Stochastic State Estimation

Abstract
:1. Introduction
Contributions
- The primary aim of this study was to assess outliers in communication delays during real-time teleoperation accurately. Since communication delays are influenced by various environmental factors such as signal quality, channel conditions, buffer status, and network load, distinguishing erroneous outliers in real time poses a significant challenge. Traditional outlier detection methods typically rely on predetermined rules based on empirical samples. However, our proposed approach employs safety-oriented criteria utilizing a coverage interval to evaluate acceptable delay thresholds dynamically. Consequently, we introduced stochastic criteria for promptly identifying communication delay outliers. Particularly, we demonstrated the efficacy of our outlier detection algorithm by showcasing enhanced performance through compensatory actions for detected outliers when employing a predictor-based framework approach;
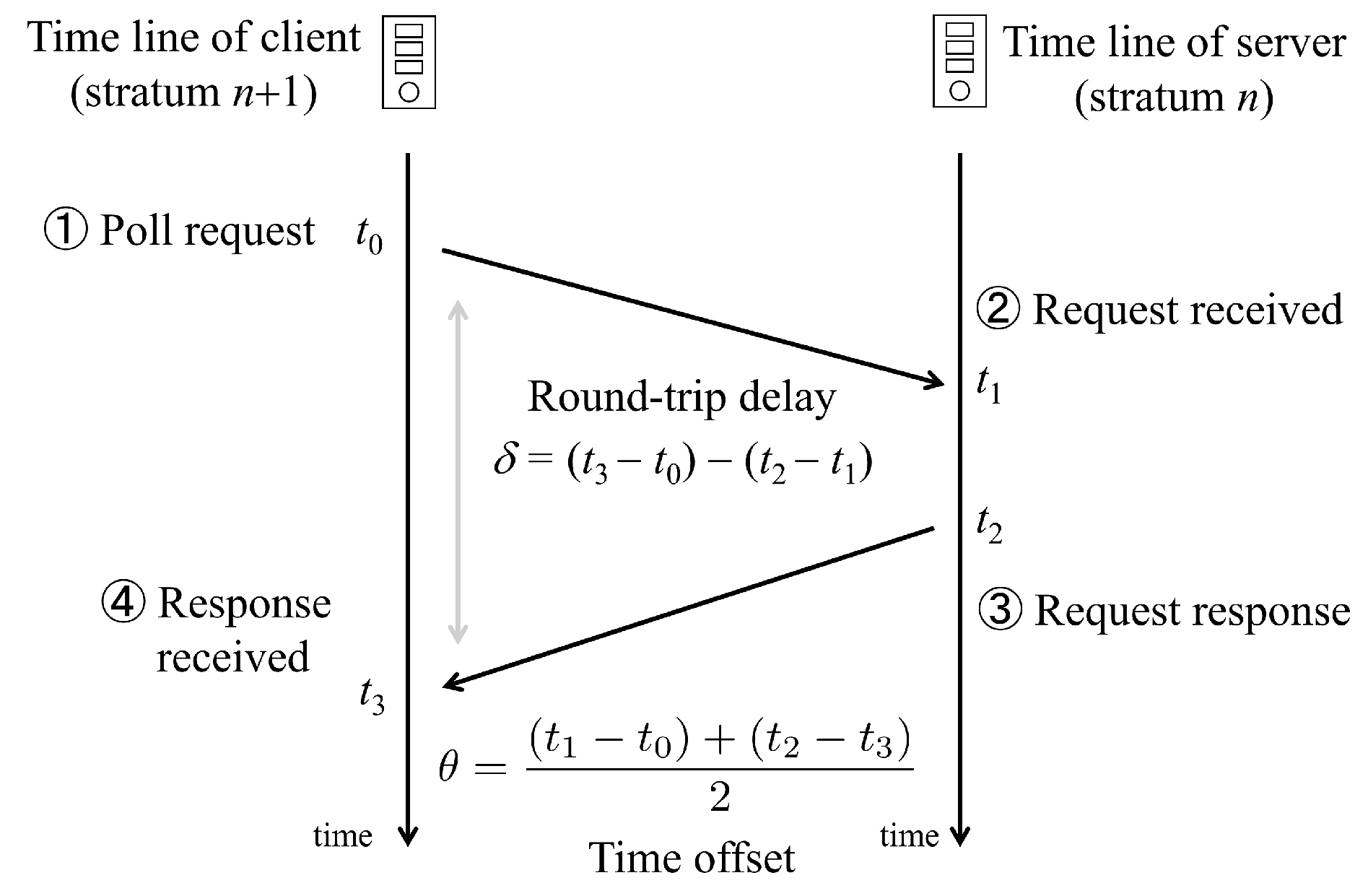
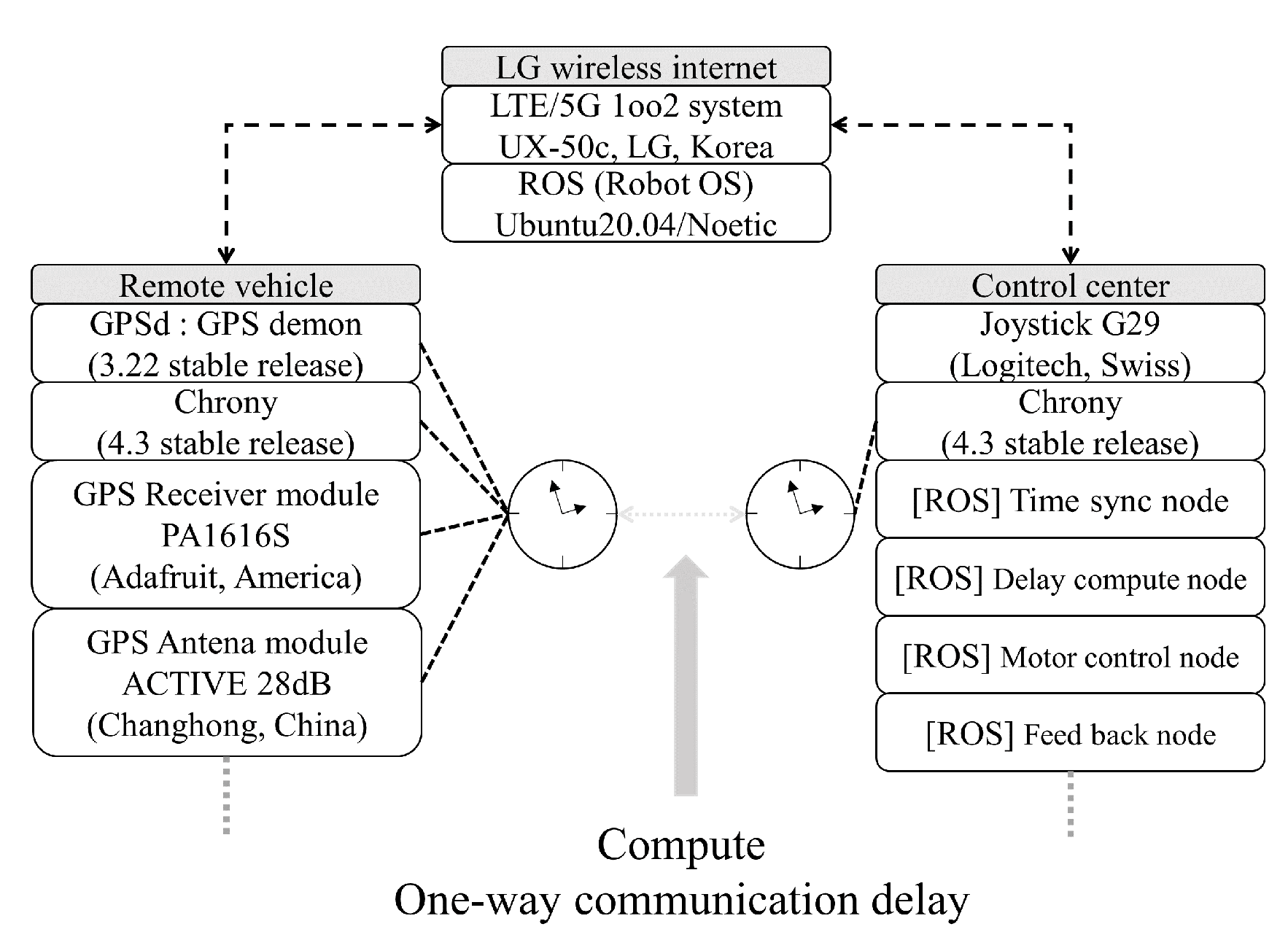
- Moreover, this study relied on actual communication delay measurements achieved through GPS time synchronization. Unlike traditional methods that measure round-trip delay, we focused on estimating one-way communication delay outliers. To accomplish this, we synchronized the time between the vehicle and the control center using GPS and compared the synchronized times to gauge one-way communication delay. This approach offers practicality for various wireless communication applications and furnishes guidance on measuring one-way communication delay, applicable not only to vehicles but also to remote control scenarios involving robots, agricultural machinery, and embedded systems;
- The findings indicate that the proposed approach is versatile and suitable not only for stable communication environments but also for dynamic conditions. Particularly, it effectively handles unpredictable communication delays, such as those encountered when transmitting between continents or traversing shielded spaces where electromagnetic waves face obstacles. An important feature of the proposed method is its ability to detect communication anomalies based on emerging trends without prior knowledge of the communication delays in the specific area. Consequently, it offers the advantage of applicability in dynamic environments, with or without prior local knowledge, making it valuable for remote work scenarios.
2. Methodology
2.1. Network Time Protocol (NTP)
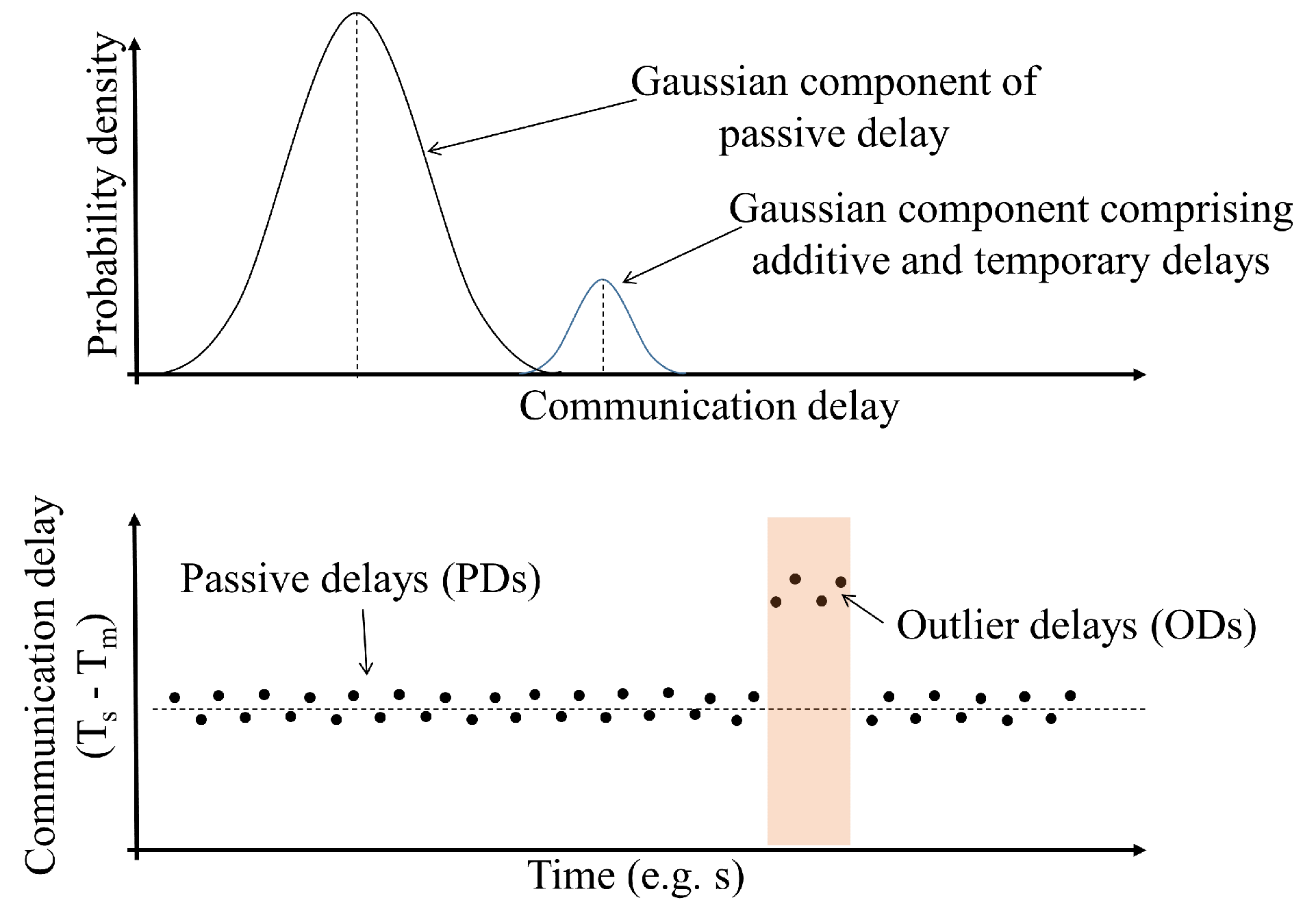
2.2. State Estimation of Communication Delay
2.3. Outlier Judging Metric
2.4. Outlier Compensation Predictor-Based Framework for Teleoperated System
3. Experiment
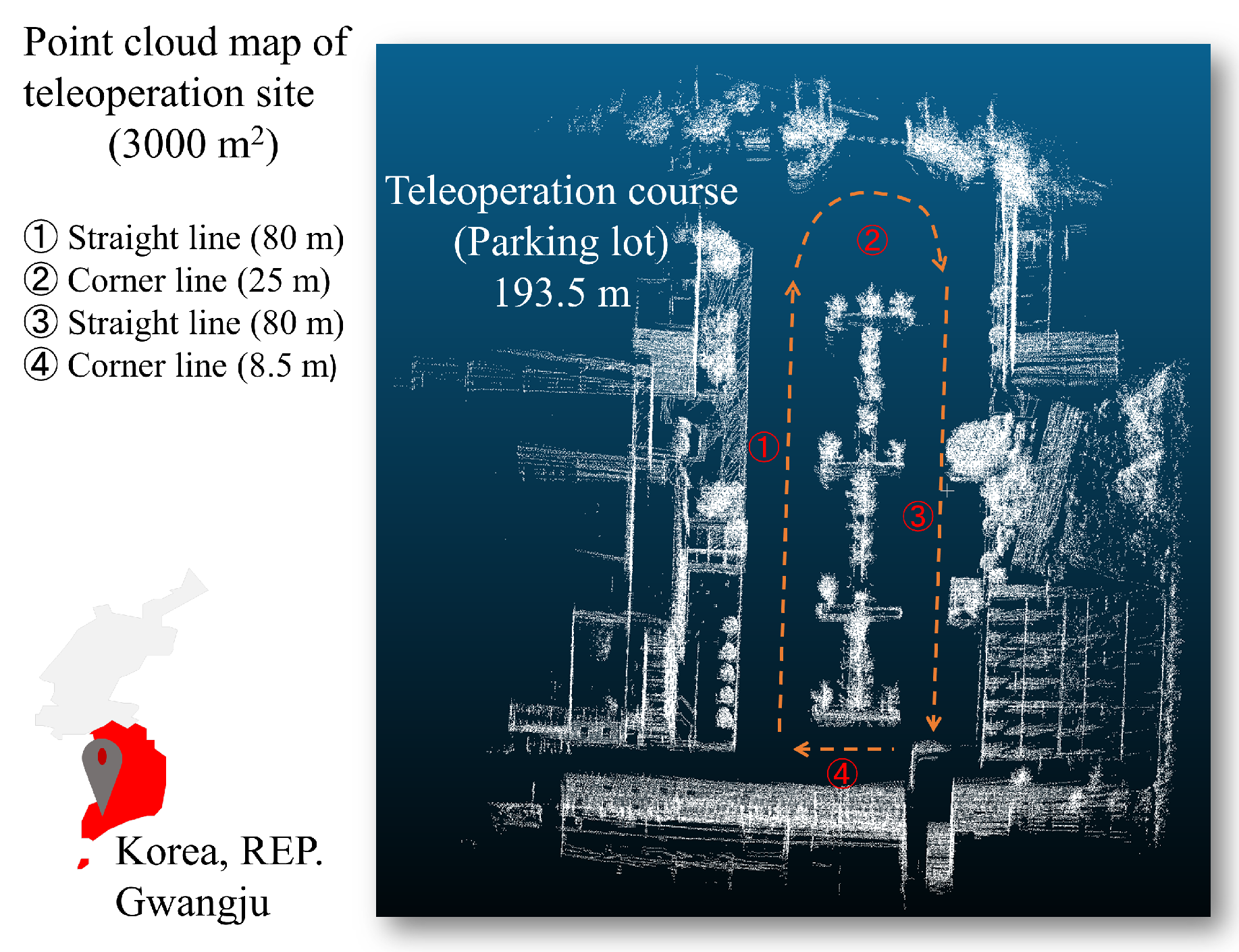
3.1. General Setups
3.2. Communication Delay Measurement and Teleoperation Setups
4. Results and Discussion
4.1. Overall Communication Delay Analysis
4.2. Weight of Gaussian Components
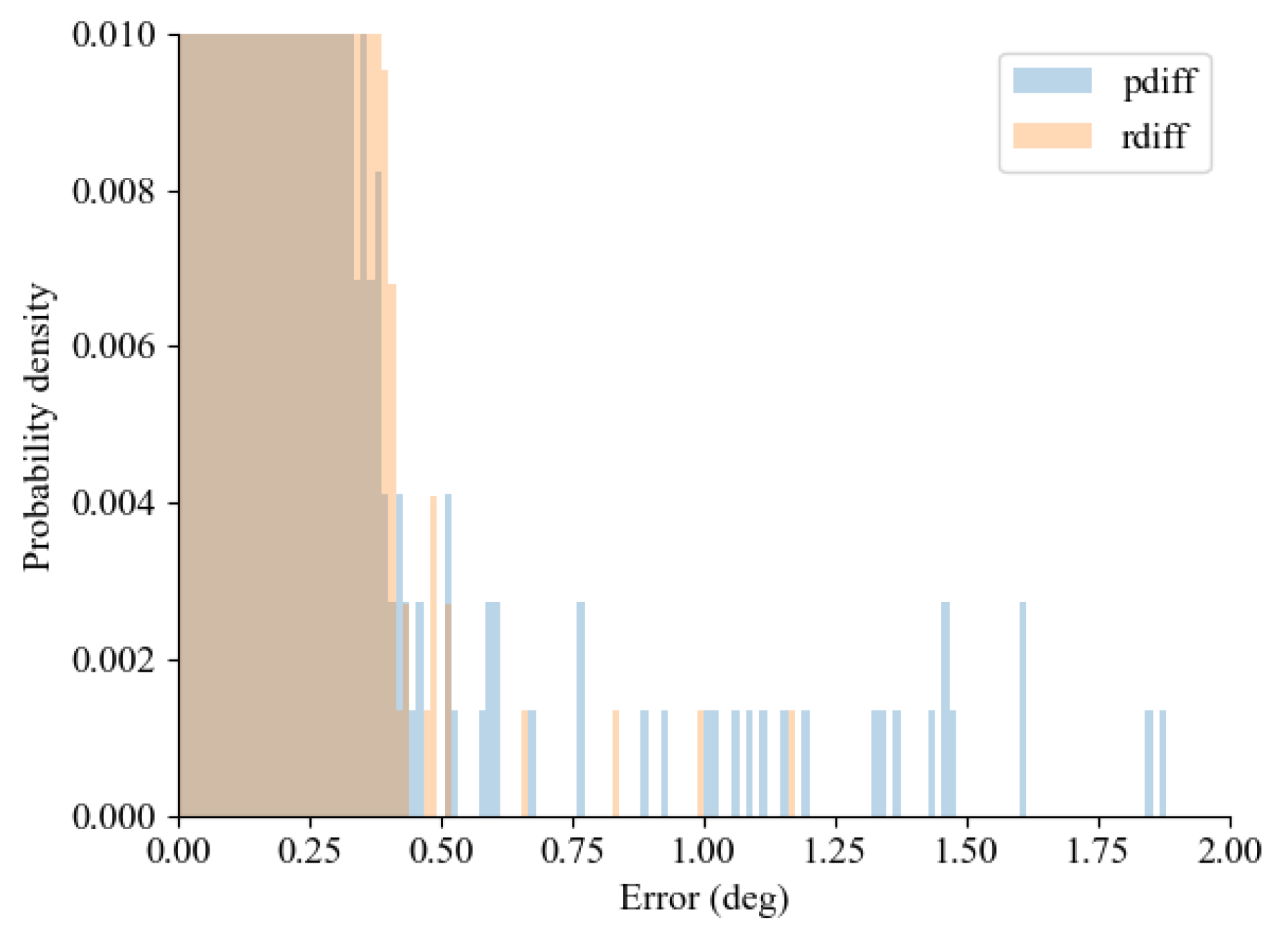
4.3. Outlier Classification Analysis
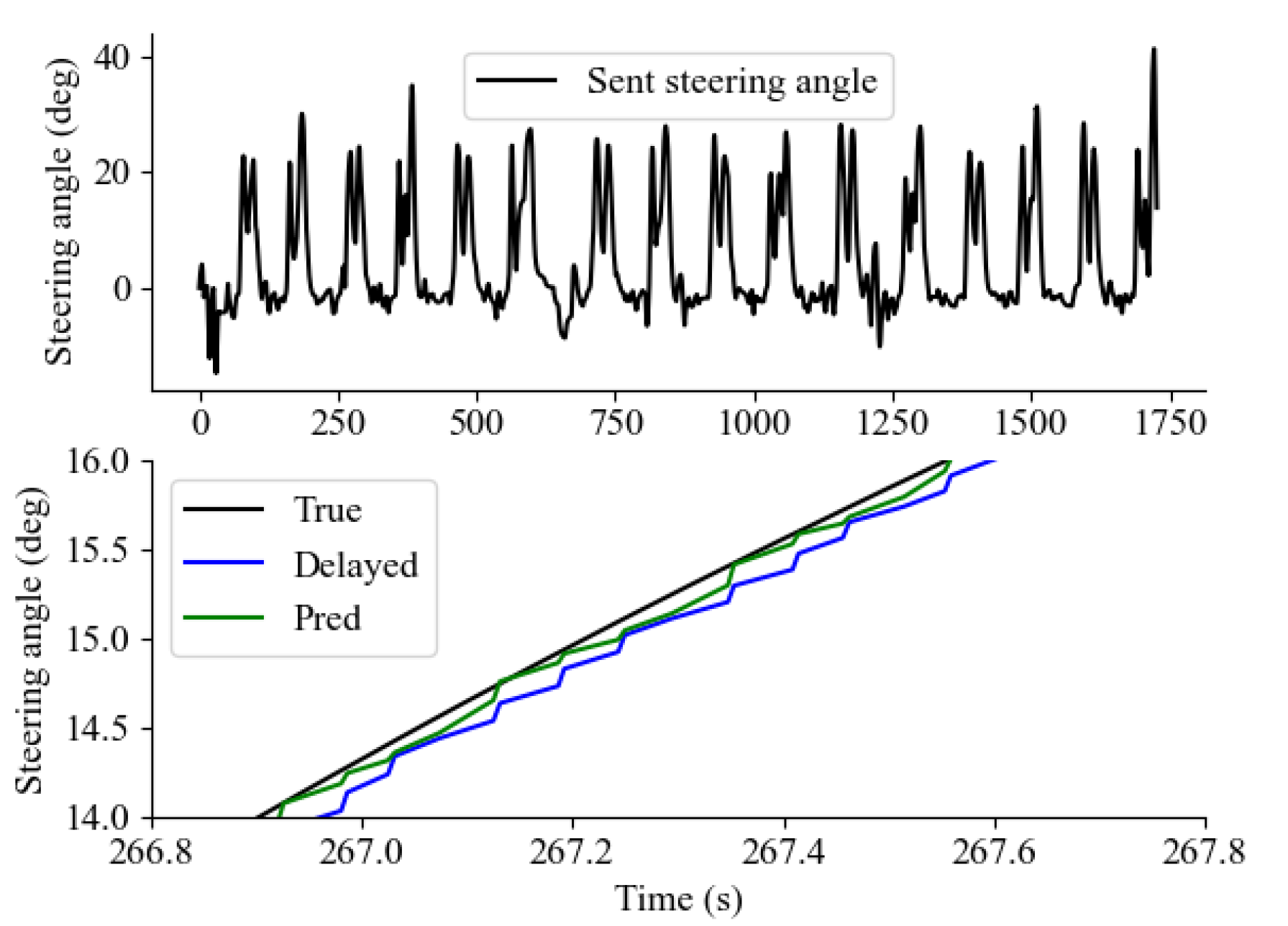
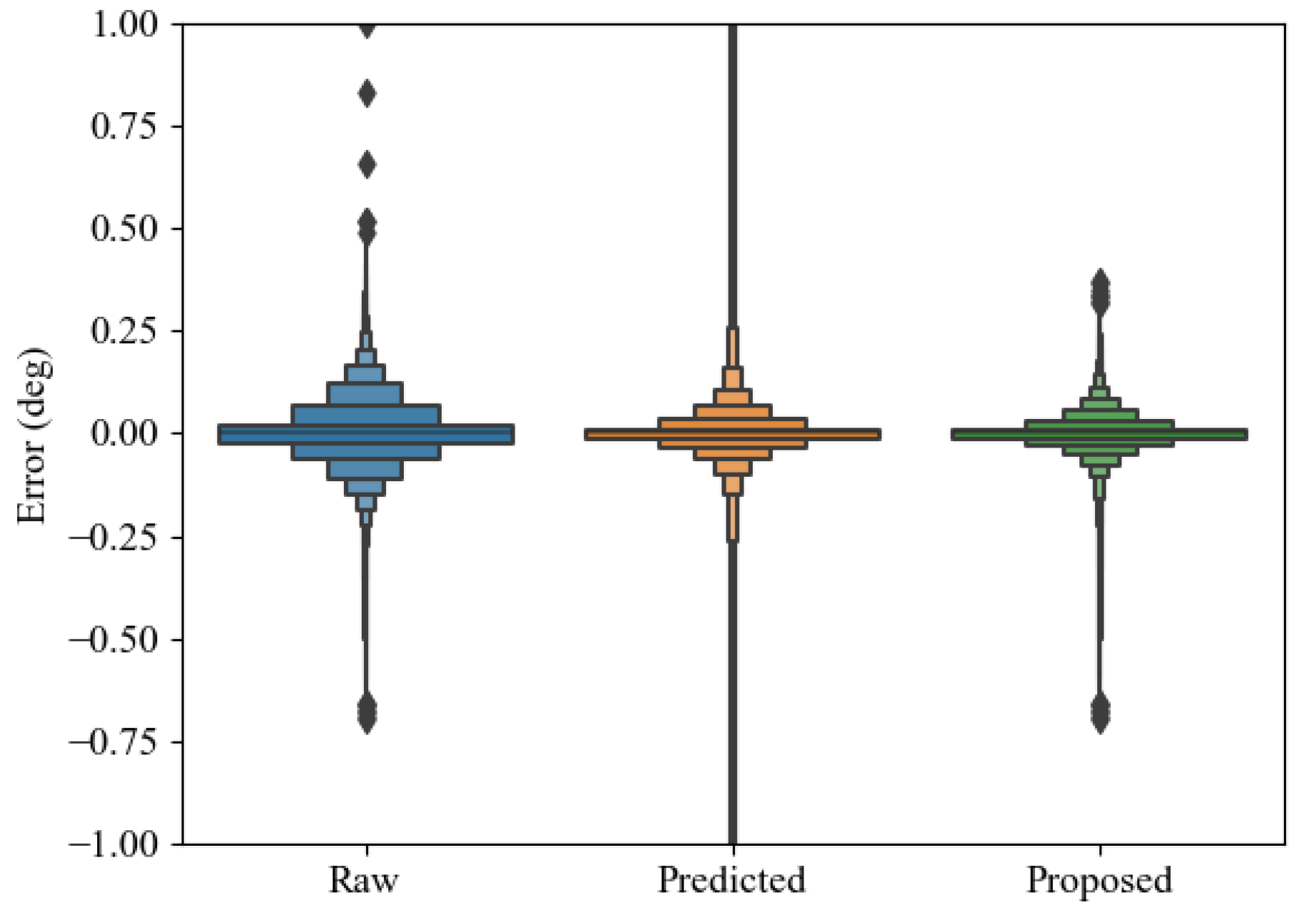
4.4. Teleoperation Command Signal Analysis
4.5. Monte Carlo Simulation Analysis against Different Communication Delays
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bhardwaj, A.; Ghasemi, A.H.; Zheng, Y.; Febbo, H.; Jayakumar, P.; Ersal, T.; Stein, J.L.; Gillespie, R.B. Who’s the boss? Arbitrating control authority between a human driver and automation system. Transp. Res. Part F Traffic Psychol. Behav. 2020, 68, 144–160. [Google Scholar] [CrossRef]
- Omeiza, D.; Webb, H.; Jirotka, M.; Kunze, L. Explanations in autonomous driving: A survey. IEEE Trans. Intell. Transp. Syst. 2021, 23, 10142–10162. [Google Scholar] [CrossRef]
- Sadaf, M.; Iqbal, Z.; Javed, A.R.; Saba, I.; Krichen, M.; Majeed, S.; Raza, A. Connected and automated vehicles: Infrastructure, applications, security, critical challenges, and future aspects. Technologies 2023, 11, 117. [Google Scholar] [CrossRef]
- Majstorović, D.; Hoffmann, S.; Pfab, F.; Schimpe, A.; Wolf, M.M.; Diermeyer, F. Survey on teleoperation concepts for automated vehicles. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; pp. 1290–1296. [Google Scholar]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; Technical Report; National Center for Statistics and Analysis: Washington, DC, USA, 2015.
- Zheng, Y.; Brudnak, M.J.; Jayakumar, P.; Stein, J.L.; Ersal, T. Evaluation of a predictor-based framework in high-speed teleoperated military UGVs. IEEE Trans. Hum.-Mach. Syst. 2020, 50, 561–572. [Google Scholar] [CrossRef]
- Sheridan, T.B. Space teleoperation through time delay: Review and prognosis. IEEE Trans. Robot. Autom. 1993, 9, 592–606. [Google Scholar] [CrossRef]
- Chen, J.Y.; Haas, E.C.; Barnes, M.J. Human performance issues and user interface design for teleoperated robots. IEEE Trans. Syst. Man, Cybern. Part C (Appl. Rev.) 2007, 37, 1231–1245. [Google Scholar] [CrossRef]
- Prakash, J.; Vignati, M.; Sabbioni, E.; Cheli, F. Vehicle Teleoperation: Human in the Loop Performance Comparison of Smith Predictor with Novel Successive Reference-Pose Tracking Approach. Sensors 2022, 22, 9119. [Google Scholar] [CrossRef]
- Prakash, J.; Vignati, M.; Sabbioni, E.; Cheli, F. Vehicle teleoperation: Successive reference-pose tracking to improve path tracking and to reduce time-delay induced instability. In Proceedings of the 2022 IEEE Vehicle Power and Propulsion Conference (VPPC), Merced, CA, USA, 1–4 November 2022; pp. 1–8. [Google Scholar]
- Storms, J.; Tilbury, D. Equating user performance among communication latency distributions and simulation fidelities for a teleoperated mobile robot. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4440–4445. [Google Scholar]
- Gorsich, D.J.; Jayakumar, P.; Cole, M.P.; Crean, C.M.; Jain, A.; Ersal, T. Evaluating mobility vs. latency in unmanned ground vehicles. J. Terramechanics 2018, 80, 11–19. [Google Scholar] [CrossRef]
- Cross, M.; McIsaac, K.A.; Dudley, B.; Choi, W. Negotiating corners with teleoperated mobile robots with time delay. IEEE Trans. Hum.-Mach. Syst. 2018, 48, 682–690. [Google Scholar] [CrossRef]
- Fabrlzio, M.D.; Lee, B.R.; Chan, D.Y.; Stoianovici, D.; Jarrett, T.W.; Yang, C.; Kavoussi, L.R. Effect of time delay on surgical performance during telesurgical manipulation. J. Endourol. 2000, 14, 133–138. [Google Scholar] [CrossRef]
- Xu, S.; Perez, M.; Yang, K.; Perrenot, C.; Felblinger, J.; Hubert, J. Determination of the latency effects on surgical performance and the acceptable latency levels in telesurgery using the dV-Trainer® simulator. Surg. Endosc. 2014, 28, 2569–2576. [Google Scholar] [CrossRef]
- Perez, M.; Xu, S.; Chauhan, S.; Tanaka, A.; Simpson, K.; Abdul-Muhsin, H.; Smith, R. Impact of delay on telesurgical performance: Study on the robotic simulator dV-Trainer. Int. J. Comput. Assist. Radiol. Surg. 2016, 11, 581–587. [Google Scholar] [CrossRef]
- Lum, M.J.; Rosen, J.; King, H.; Friedman, D.C.; Lendvay, T.S.; Wright, A.S.; Sinanan, M.N.; Hannaford, B. Teleoperation in surgical robotics–network latency effects on surgical performance. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 2–6 September 2009; pp. 6860–6863. [Google Scholar]
- Chucholowski, F.E. Evaluation of display methods for teleoperation of road vehicles. J. Unmanned Syst. Technol. 2016, 3, 80–85. [Google Scholar] [CrossRef]
- Brudnak, M.J. Predictive displays for high latency teleoperation. In Proceedings of the NDIA Ground Vehicle Systems Engineering and Technology. Symposium, Novi, MI, USA, 2–4 August 2016; pp. 1–16. [Google Scholar]
- Moniruzzaman, M.; Rassau, A.; Chai, D.; Islam, S.M.S. High Latency Unmanned Ground Vehicle Teleoperation Enhancement by Presentation of Estimated Future through Video Transformation. J. Intell. Robot. Syst. 2022, 106, 48. [Google Scholar] [CrossRef]
- Dybvik, H.; Løland, M.; Gerstenberg, A.; Slåttsveen, K.B.; Steinert, M. A low-cost predictive display for teleoperation: Investigating effects on human performance and workload. Int. J. Hum.-Comput. Stud. 2021, 145, 102536. [Google Scholar] [CrossRef]
- Prakash, J.; Vignati, M.; Vignarca, D.; Sabbioni, E.; Cheli, F. Predictive display with perspective projection of surroundings in vehicle teleoperation to account time-delays. IEEE Trans. Intell. Transp. Syst. 2023, 24, 9084–9097. [Google Scholar] [CrossRef]
- Chang, L.; Li, K. Unified form for the robust Gaussian information filtering based on M-estimate. IEEE Signal Process. Lett. 2017, 24, 412–416. [Google Scholar] [CrossRef]
- Chang, G. Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion. J. Geod. 2014, 88, 391–401. [Google Scholar] [CrossRef]
- Wang, H.; Li, H.; Zhang, W.; Wang, H. Laplace l1 robust Kalman filter based on majorization minimization. In Proceedings of the 2017 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 July 2017; pp. 1–5. [Google Scholar]
- Wan, Q.; Duan, H.; Fang, J.; Li, H.; Xing, Z. Robust Bayesian compressed sensing with outliers. Signal Process. 2017, 140, 104–109. [Google Scholar] [CrossRef]
- Kim, E.; Yamada, Y.; Shogo, O. Robust Asymmetric Safety Kalman Filter for MIMO Radar Resisting Temporary Outliers. IEEE Sens. J. 2022, 22, 18532–18541. [Google Scholar] [CrossRef]
- Pan, Y.J.; Canudas-de Wit, C.; Sename, O. A new predictive approach for bilateral teleoperation with applications to drive-by-wire systems. IEEE Trans. Robot. 2006, 22, 1146–1162. [Google Scholar] [CrossRef]
- Janabi-Sharifi, F.; Hassanzadeh, I. Experimental analysis of mobile-robot teleoperation via shared impedance control. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2010, 41, 591–606. [Google Scholar] [CrossRef]
- Penizzotto, F.; García, S.; Slawiñski, E.; Mut, V. Delayed bilateral teleoperation of wheeled robots including a command metric. Math. Probl. Eng. 2015, 2015, 460476. [Google Scholar] [CrossRef]
- Zheng, Y.; Brudnak, M.J.; Jayakumar, P.; Stein, J.L.; Ersal, T. A predictor-based framework for delay compensation in networked closed-loop systems. IEEE/ASME Trans. Mechatron. 2018, 23, 2482–2493. [Google Scholar] [CrossRef]
- Zheng, Y.; Brudnak, M.J.; Jayakumar, P.; Stein, J.L.; Ersal, T. A delay compensation framework for predicting heading in teleoperated ground vehicles. IEEE/ASME Trans. Mechatron. 2019, 24, 2365–2376. [Google Scholar] [CrossRef]
- Guo, S.; Liu, Y.; Zheng, Y.; Ersal, T. A Delay Compensation Framework for Connected Testbeds. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 4163–4176. [Google Scholar] [CrossRef]
- Mills, D.L. Network Time Protocol (NTP), Document RFC 958, 1985. Technical Report, 1985. Available online: https://tools.ietf.org/html/rfc958 (accessed on 15 January 2024).
- Langley, R. Nmea 0183: A gps receiver. GPS World 1995, 6, 54–57. [Google Scholar]
- Koo, K.Y.; Hester, D.; Kim, S. Time synchronization for wireless sensors using low-cost gps module and arduino. Front. Built Environ. 2019, 4, 82. [Google Scholar] [CrossRef]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- SAE-J2735; V2X Communications Message Set Dictionary. SAE International DSRC Committee: Warrendale, PA, USA, 2022.
- Tahir, M.N.; Leviäkangas, P.; Katz, M. Connected vehicles: V2V and V2I road weather and traffic communication using cellular technologies. Sensors 2022, 22, 1142. [Google Scholar] [CrossRef]
- IEC/TS 62998; Safety of Machinery-Electro-Sensitive Protective Equipment-Safety-Related Sensors Used for Protection of Person. International Electrotechnical Commission (IEC): Geneva, Switzerland, 2019.
- IEC 61508:2010; Functional Safety of Electrical-Electronic/Programmable Electronic Safety-Related Systems. International Electrotechnical Commission (IEC): Geneva, Switzerland, 2010.
- Gnatzig, S.; Chucholowski, F.; Tang, T.; Lienkamp, M. A system design for teleoperated road vehicles. In Proceedings of the International Conference on Informatics in Control, Automation and Robotics, Reykjavík, Iceland, 29–31 July 2013; Volume 2, pp. 231–238. [Google Scholar]
- Appelqvist, P.; Knuuttila, J.; Ahtiainen, J. Development of an Unmanned Ground Vehicle for task-oriented operation-considerations on teleoperation and delay. In Proceedings of the 2007 IEEE/ASME international conference on advanced intelligent mechatronics, Zürich, Switzerland, 4–7 September 2007; pp. 1–6. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Raw Samples | Predictor | Outlier Compensated Predictor |
|---|---|---|---|
| Mean error (deg) | |||
| Standard deviation (deg) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, E.; Hwang, M.; Lim, T.; Jeong, C.; Yoon, S.; Cha, H. Communication Delay Outlier Detection and Compensation for Teleoperation Using Stochastic State Estimation. Sensors 2024, 24, 1241. https://doi.org/10.3390/s24041241
Kim E, Hwang M, Lim T, Jeong C, Yoon S, Cha H. Communication Delay Outlier Detection and Compensation for Teleoperation Using Stochastic State Estimation. Sensors. 2024; 24(4):1241. https://doi.org/10.3390/s24041241
Chicago/Turabian StyleKim, Eugene, Myeonghwan Hwang, Taeyoon Lim, Chanyeong Jeong, Seungha Yoon, and Hyunrok Cha. 2024. "Communication Delay Outlier Detection and Compensation for Teleoperation Using Stochastic State Estimation" Sensors 24, no. 4: 1241. https://doi.org/10.3390/s24041241