
Stretchable Sensors for Soft Robotic Grippers in Edge-Intelligent IoT Applications

Abstract
:1. Introduction
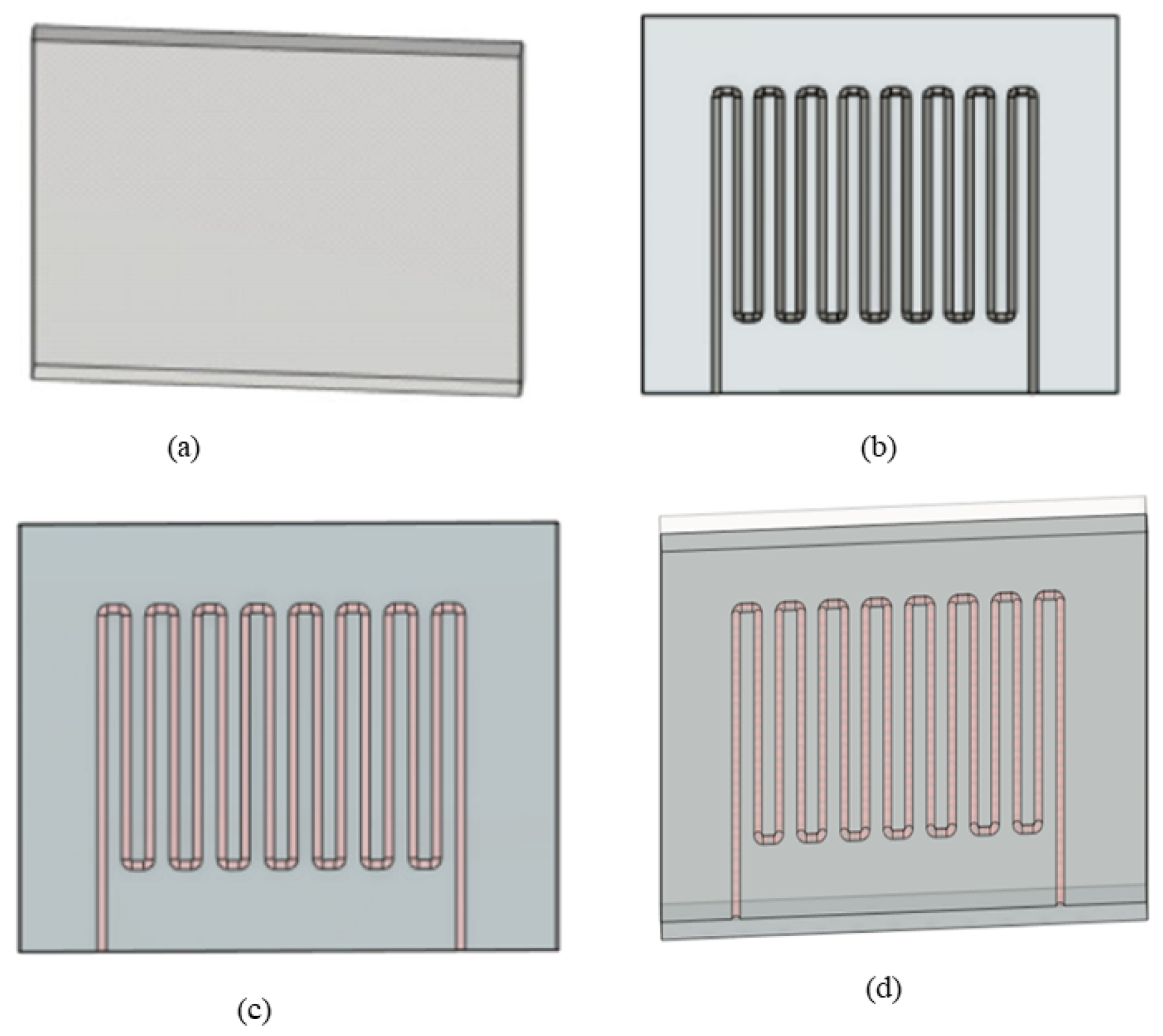
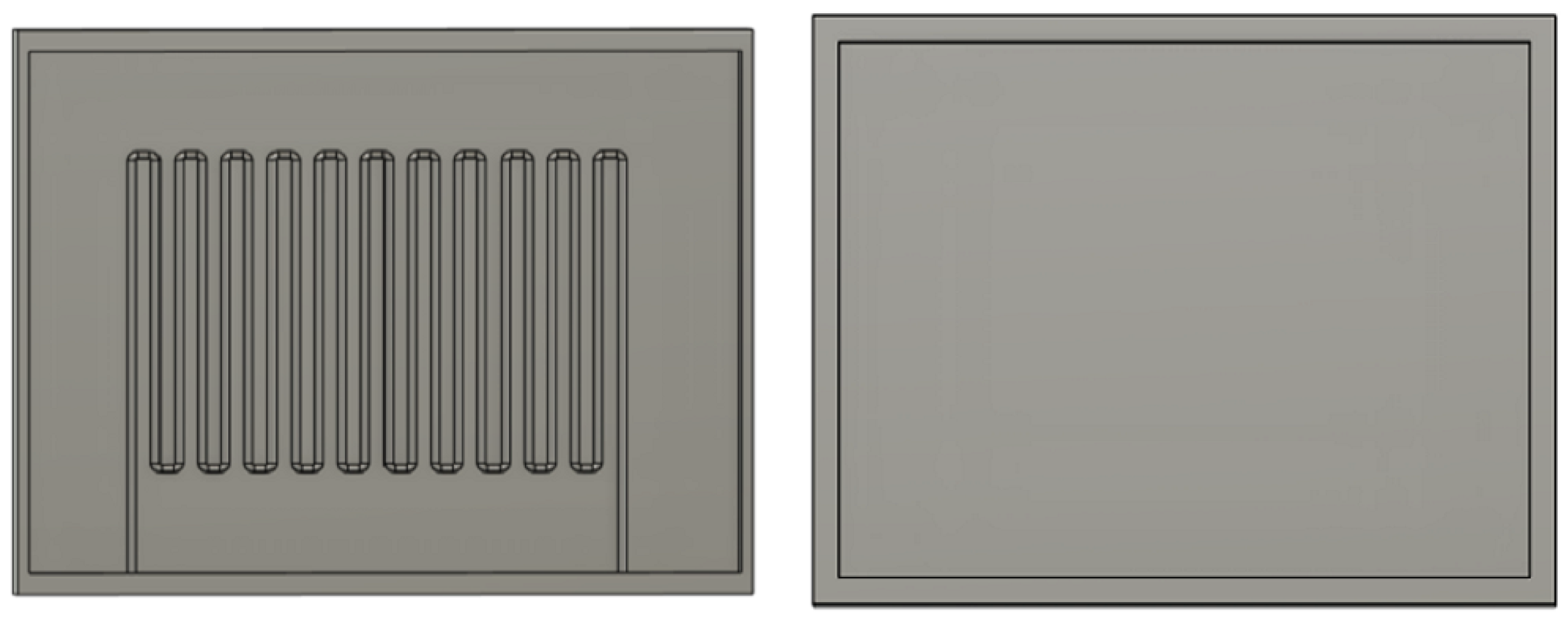
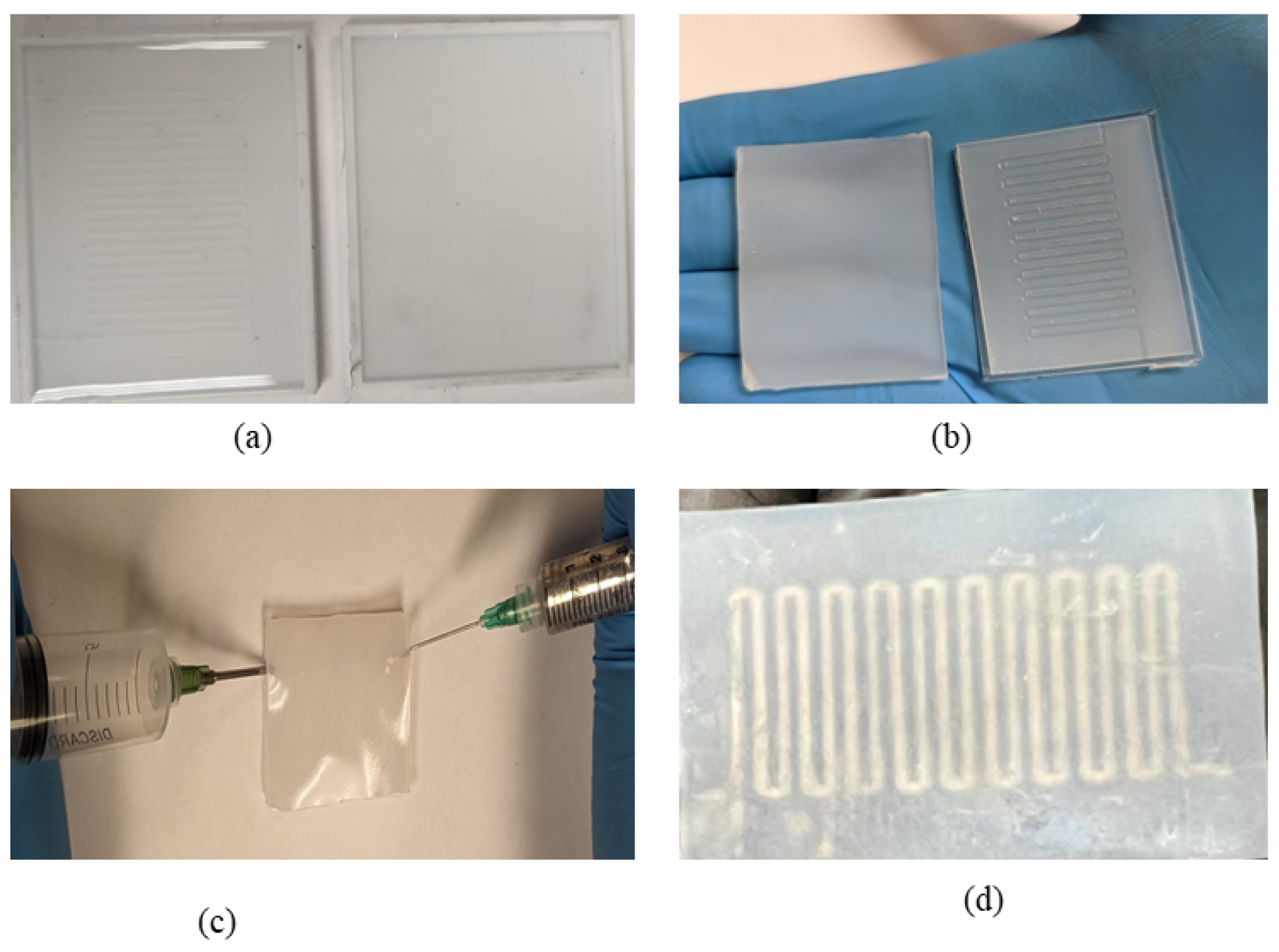
2. Design and Fabrication Process
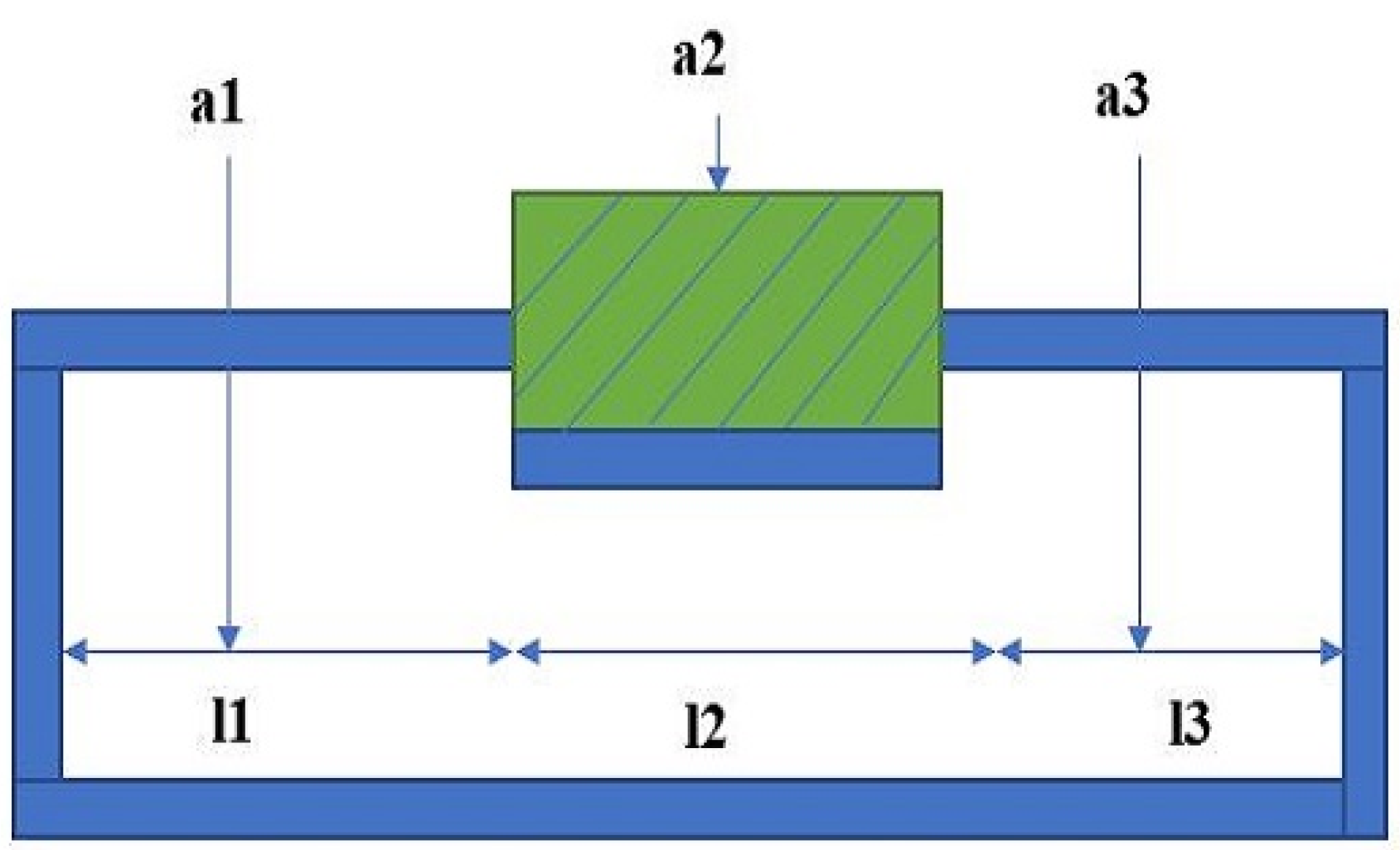
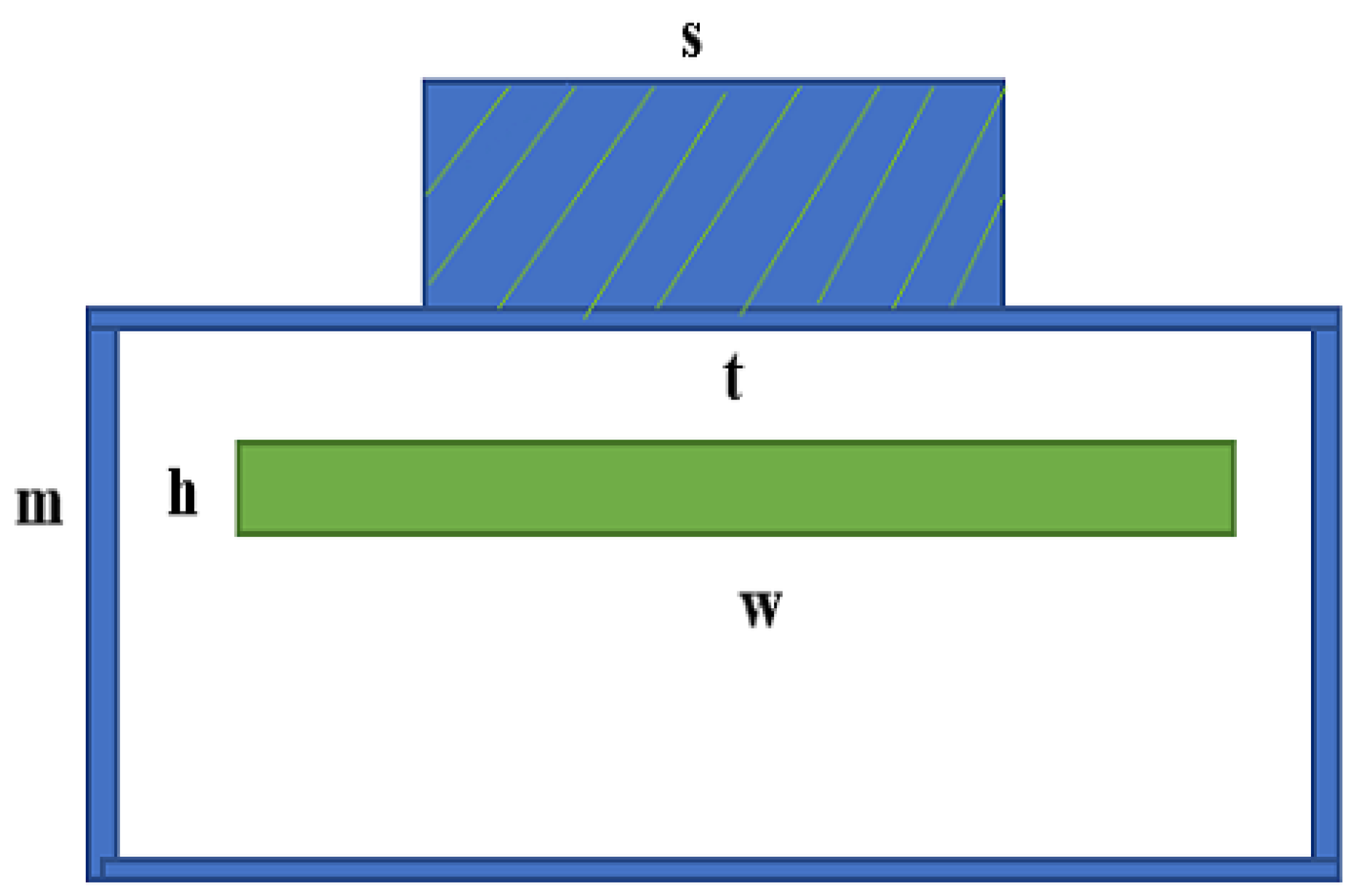
2.1. Mathematical Modeling of the Soft Sensor
2.2. Liquid Metal Preparation
2.3. Device Working Mechanism
- is the value of resistance when the sensor is stretched,
- represents the electrical resistivity of the Galinstan,
- l is the length of the micro-channel,
- l is the channel length when the sensor is stretched,
- w is the width of the sensor, and
- h is the cross-section of the micro-channel.
3. Applications of Soft Sensors
4. Results and Discussion
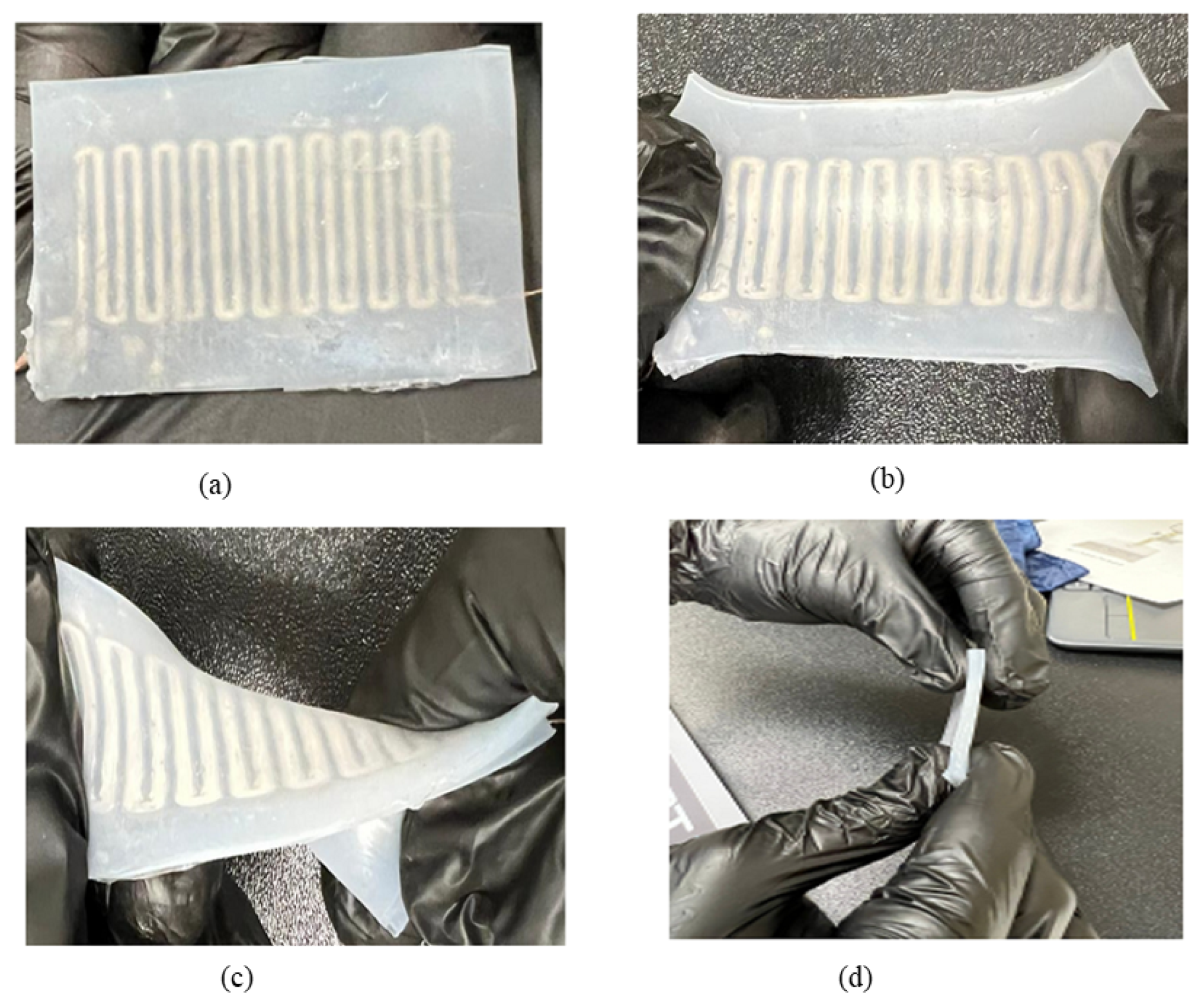
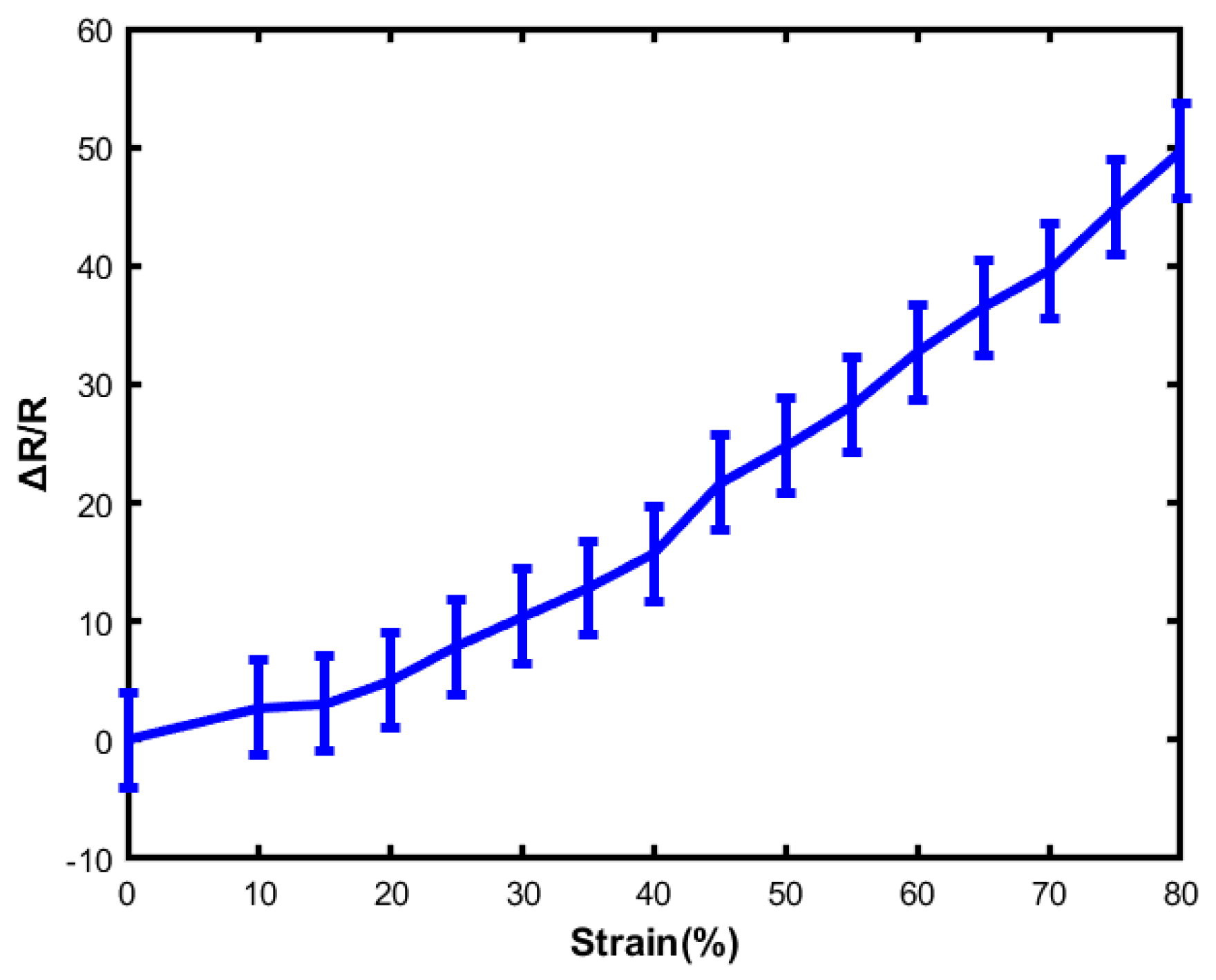
4.1. Stretchability
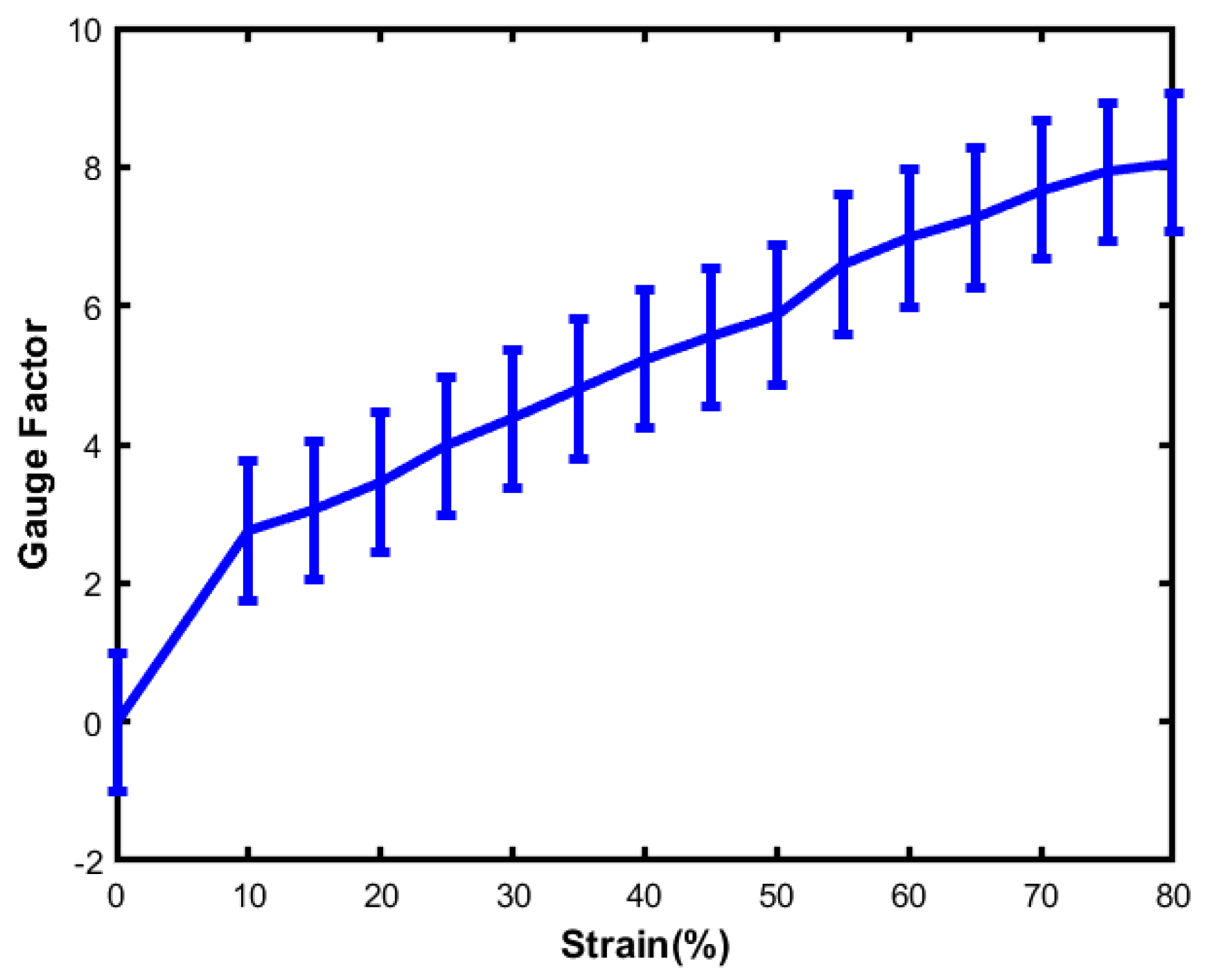
4.2. Gauge Factors
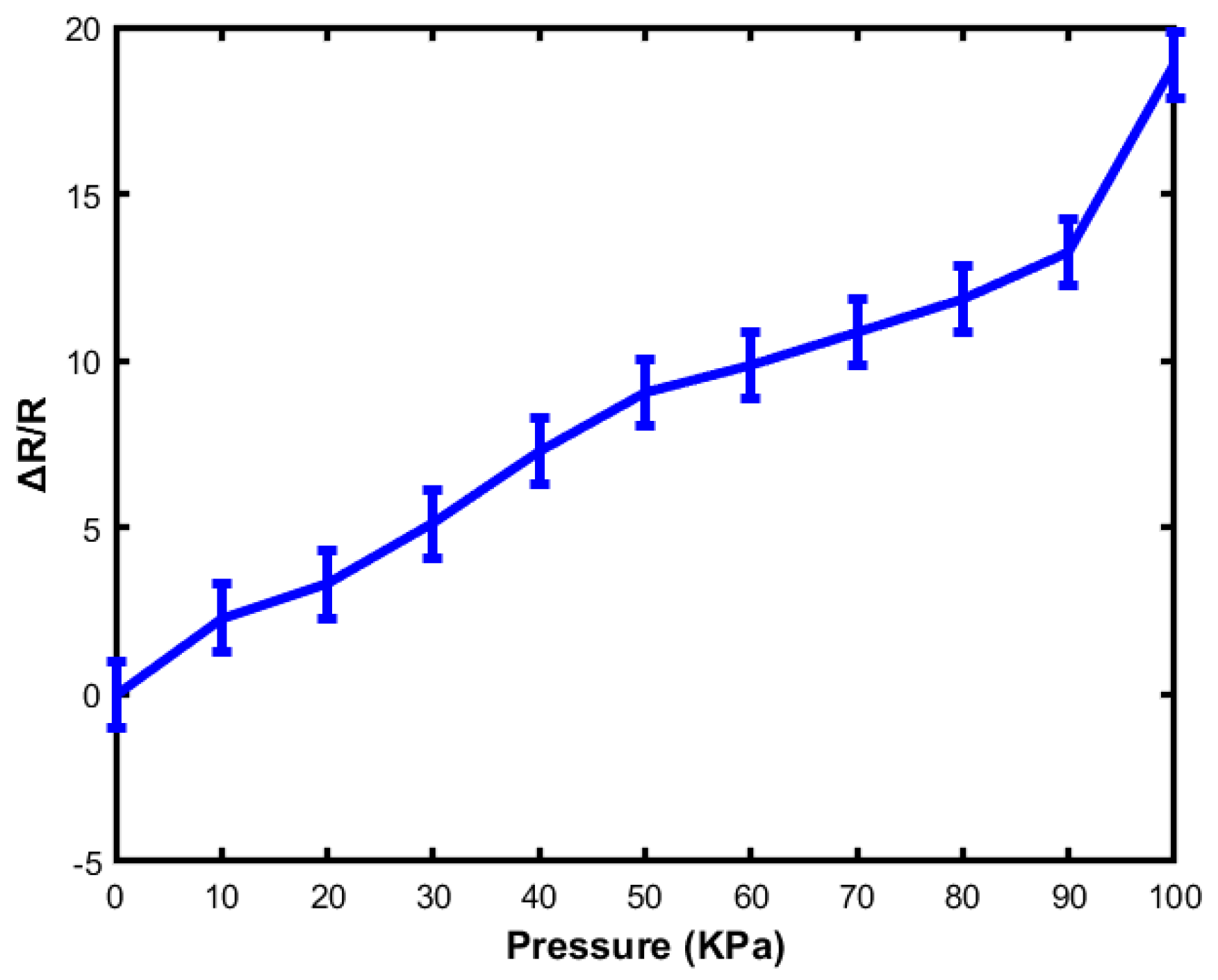
4.3. Linearity
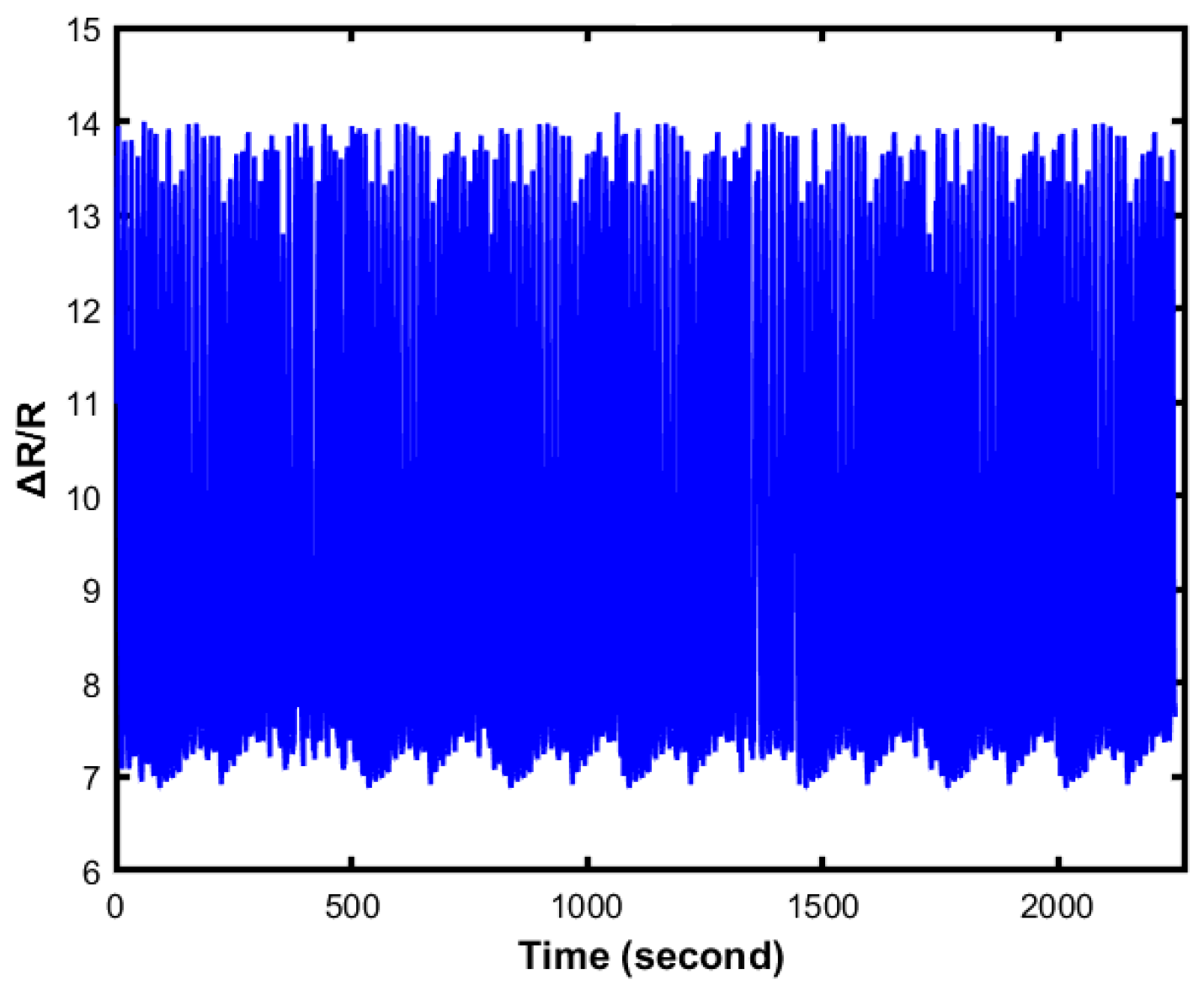
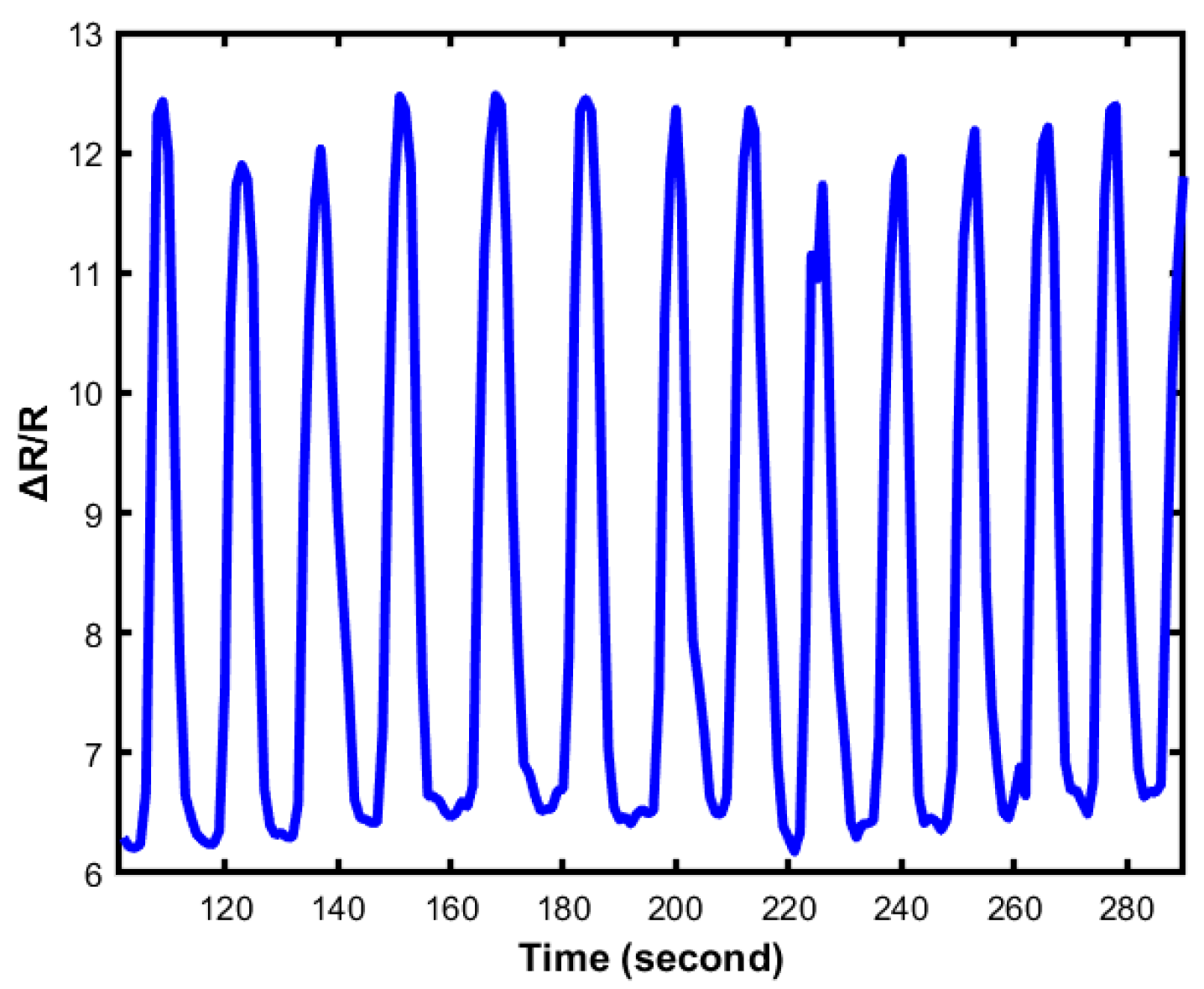
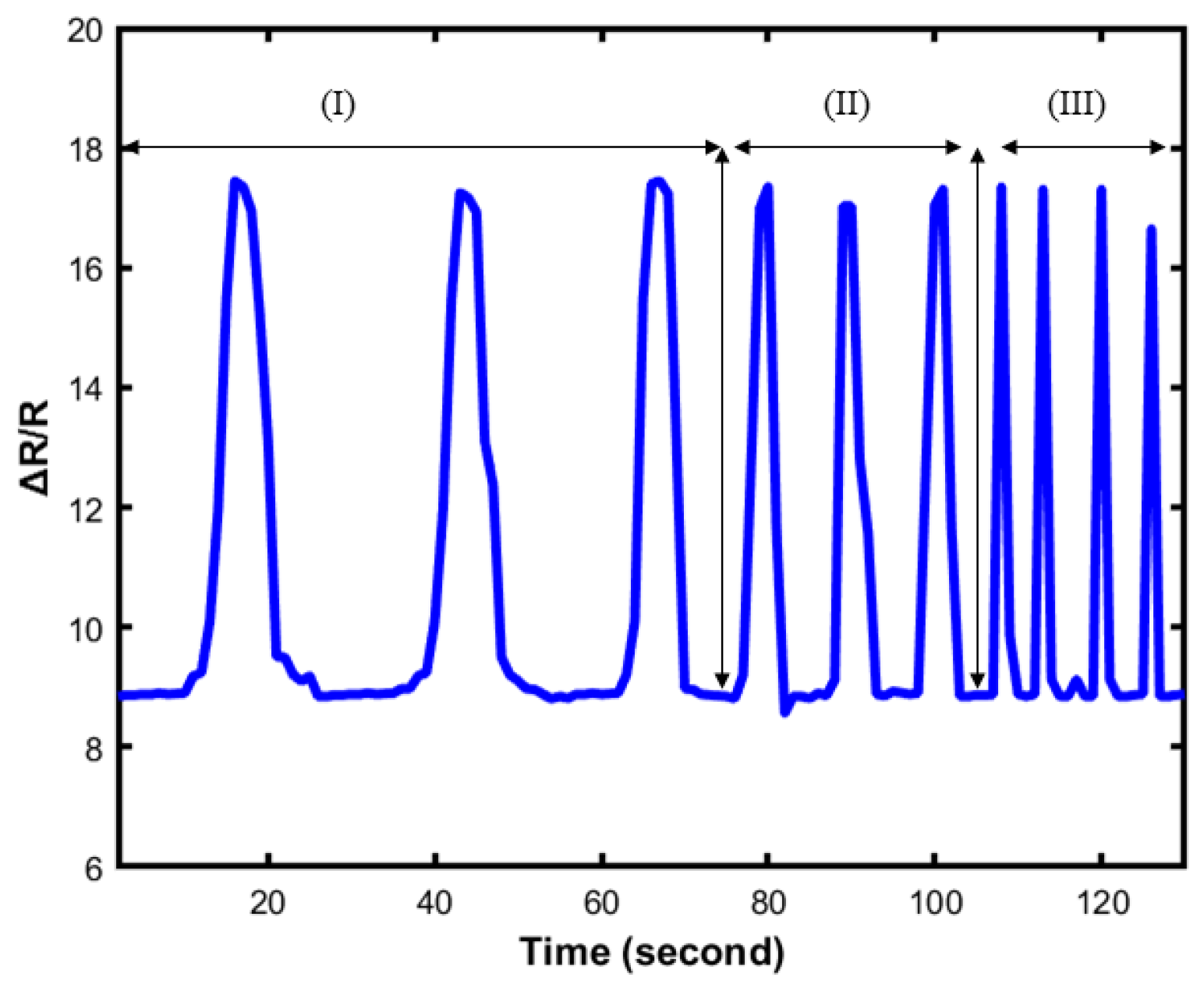
4.4. Durability
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bartolozzi, C.; Natale, L.; Nori, F.; Metta, G. Robots with a sense of touch. Nat. Mater. 2016, 15, 921–925. [Google Scholar] [CrossRef] [PubMed]
- Hammock, M.L.; Chortos, A.; Tee, B.C.K.; Tok, J.B.H.; Bao, Z. 25th Anniversary Article: The Evolution of Electronic Skin (E-Skin): A Brief History, Design Considerations, and Recent Progress. Adv. Mater. 2013, 25, 5997–6038. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Zhang, Y.; Jia, L.; Mathewson, K.E.; Jang, K.I.; Kim, J.; Fu, H.; Huang, X.; Chava, P.; Wang, R.; et al. Soft microfluidic assemblies of sensors, circuits, and radios for the skin. Science 2014, 344, 70–74. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Wu, X.; Lee, D.W. A galinstan-based inkjet printing system for highly stretchable electronics with self-healing capability. Lab Chip 2016, 16, 1366–1373. [Google Scholar] [CrossRef] [PubMed]
- Majidi, C.; Alizadeh, K.; Ohm, Y.; Silva, A.; Tavakoli, M. Liquid metal polymer composites: From printed stretchable circuits to soft actuators. Flex. Print. Electron. 2022, 7, 013002. [Google Scholar] [CrossRef]
- Gao, Q.; Zhang, J.; Xie, Z.; Omisore, O.; Zhang, J.; Wang, L.; Li, H. Highly stretchable sensors for wearable biomedical applications. J. Mater. Sci. 2019, 54, 5187–5223. [Google Scholar] [CrossRef]
- Chossat, J.B.; Park, Y.L.; Wood, R.J.; Duchaine, V. A soft strain sensor based on ionic and metal liquids. IEEE Sens. J. 2013, 13, 3405–3414. [Google Scholar] [CrossRef]
- Kazem, N.; Bartlett, M.D.; Majidi, C. Extreme toughening of soft materials with liquid metal. Adv. Mater. 2018, 30, 1706594. [Google Scholar] [CrossRef] [PubMed]
- Yan, S.; Li, Y.; Zhao, Q.; Yuan, D.; Yun, G.; Zhang, J.; Wen, W.; Tang, S.Y.; Li, W. Liquid metal-based amalgamation-assisted lithography for fabrication of complex channels with diverse structures and configurations. Lab Chip 2018, 18, 785–792. [Google Scholar] [CrossRef]
- Muth, J.T.; Vogt, D.M.; Truby, R.L.; Mengüç, Y.; Kolesky, D.B.; Wood, R.J.; Lewis, J.A. Embedded 3D printing of strain sensors within highly stretchable elastomers. Adv. Mater. 2014, 26, 6307–6312. [Google Scholar] [CrossRef]
- Kazem, N.; Hellebrekers, T.; Majidi, C. Soft multifunctional composites and emulsions with liquid metals. Adv. Mater. 2017, 29, 1605985. [Google Scholar] [CrossRef]
- Tang, S.Y.; Qiao, R.; Yan, S.; Yuan, D.; Zhao, Q.; Yun, G.; Davis, T.P.; Li, W. Microfluidic mass production of stabilized and stealthy liquid metal nanoparticles. Small 2018, 14, 1800118. [Google Scholar] [CrossRef]
- Tavakoli, M.; Malakooti, M.H.; Paisana, H.; Ohm, Y.; Green Marques, D.; Alhais Lopes, P.; Piedade, A.P.; de Almeida, A.T.; Majidi, C. EGaIn-Assisted Room-Temperature Sintering of Silver Nanoparticles for Stretchable, Inkjet-Printed, Thin-Film Electronics. Adv. Mater. 2018, 30, 1801852. [Google Scholar] [CrossRef] [PubMed]
- Daeneke, T.; Khoshmanesh, K.; Mahmood, N.; De Castro, I.A.; Esrafilzadeh, D.; Barrow, S.; Dickey, M.; Kalantar-Zadeh, K. Liquid metals: Fundamentals and applications in chemistry. Chem. Soc. Rev. 2018, 47, 4073–4111. [Google Scholar] [CrossRef] [PubMed]
- Dickey, M.D.; Chiechi, R.C.; Larsen, R.J.; Weiss, E.A.; Weitz, D.A.; Whitesides, G.M. Eutectic gallium-indium (EGaIn): A liquid metal alloy for the formation of stable structures in microchannels at room temperature. Adv. Funct. Mater. 2008, 18, 1097–1104. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile sensing—From humans to humanoids. IEEE Trans. Robot. 2009, 26, 1–20. [Google Scholar] [CrossRef]
- Xi, K.; Wang, Y.; Mei, D.; Liang, G.; Chen, Z. A flexible tactile sensor array based on pressure conductive rubber for three-axis force and slip detection. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Republic of Korea, 7–11 July 2015; pp. 476–481. [Google Scholar]
- Wang, H.; Wang, H.; Wang, Y.; Su, X.; Wang, C.; Zhang, M.; Jian, M.; Xia, K.; Liang, X.; Lu, H.; et al. Laser writing of janus graphene/kevlar textile for intelligent protective clothing. ACS Nano 2020, 14, 3219–3226. [Google Scholar] [CrossRef]
- Wang, C.; Xia, K.; Zhang, M.; Jian, M.; Zhang, Y. An all-silk-derived dual-mode e-skin for simultaneous temperature–pressure detection. ACS Appl. Mater. Interfaces 2017, 9, 39484–39492. [Google Scholar] [CrossRef] [PubMed]
- Oh, J.; Yang, J.C.; Kim, J.O.; Park, H.; Kwon, S.Y.; Lee, S.; Sim, J.Y.; Oh, H.W.; Kim, J.; Park, S. Pressure insensitive strain sensor with facile solution-based process for tactile sensing applications. ACS Nano 2018, 12, 7546–7553. [Google Scholar] [CrossRef] [PubMed]
- Basu, J.; Basu, J.K.; Bhattacharyya, T.K. The evolution of graphene-based electronic devices. Int. J. Smart Nano Mater. 2010, 1, 201–223. [Google Scholar] [CrossRef]
- Wang, C.; Xia, K.; Wang, H.; Liang, X.; Yin, Z.; Zhang, Y. Advanced carbon for flexible and wearable electronics. Adv. Mater. 2019, 31, 1801072. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Deng, H.; Xie, Y.; Zhang, C.; Su, J.W.; Lin, J. Stimulus responsive 3D assembly for spatially resolved bifunctional sensors. Small 2019, 15, 1904224. [Google Scholar] [CrossRef] [PubMed]
- Park, S.; Mondal, K.; Treadway III, R.M.; Kumar, V.; Ma, S.; Holbery, J.D.; Dickey, M.D. Silicones for stretchable and durable soft devices: Beyond Sylgard-184. ACS Appl. Mater. Interfaces 2018, 10, 11261–11268. [Google Scholar] [CrossRef]
- Shin, H.S.; Ryu, J.; Majidi, C.; Park, Y.L. Enhanced performance of microfluidic soft pressure sensors with embedded solid microspheres. J. Micromech. Microeng. 2016, 26, 025011. [Google Scholar] [CrossRef]
- Park, J.; Wang, S.; Li, M.; Ahn, C.; Hyun, J.K.; Kim, D.S.; Kim, D.K.; Rogers, J.A.; Huang, Y.; Jeon, S. Three-dimensional nanonetworks for giant stretchability in dielectrics and conductors. Nat. Commun. 2012, 3, 916. [Google Scholar] [CrossRef]
- Kim, M.G.; Alrowais, H.; Pavlidis, S.; Brand, O. Size-scalable and high-density liquid-metal-based soft electronic passive components and circuits using soft lithography. Adv. Funct. Mater. 2017, 27, 1604466. [Google Scholar] [CrossRef]
- Ota, H.; Emaminejad, S.; Gao, Y.; Zhao, A.; Wu, E.; Challa, S.; Chen, K.; Fahad, H.M.; Jha, A.K.; Kiriya, D.; et al. Application of 3D printing for smart objects with embedded electronic sensors and systems. Adv. Mater. Technol. 2016, 1, 1600013. [Google Scholar] [CrossRef]
- Zheng, Y.; He, Z.Z.; Yang, J.; Liu, J. Personal electronics printing via tapping mode composite liquid metal ink delivery and adhesion mechanism. Sci. Rep. 2014, 4, 4588. [Google Scholar] [CrossRef] [PubMed]
- Guo, R.; Wang, X.; Chang, H.; Yu, W.; Liang, S.; Rao, W.; Liu, J. Ni-GaIn amalgams enabled rapid and customizable fabrication of wearable and wireless healthcare electronics. Adv. Eng. Mater. 2018, 20, 1800054. [Google Scholar] [CrossRef]
- Mohammed, M.G.; Kramer, R. All-printed flexible and stretchable electronics. Adv. Mater. 2017, 29, 1604965. [Google Scholar] [CrossRef]
- He, Y.; Wu, Y.; Fu, J.z.; Gao, Q.; Qiu, J.j. Developments of 3D printing microfluidics and applications in chemistry and biology: A review. Electroanalysis 2016, 28, 1658–1678. [Google Scholar] [CrossRef]
- Takahashi, T.; Takei, K.; Gillies, A.G.; Fearing, R.S.; Javey, A. Carbon nanotube active-matrix backplanes for conformal electronics and sensors. Nano Lett. 2011, 11, 5408–5413. [Google Scholar] [CrossRef] [PubMed]
- Ghosh, P.; Sundaravadivel, P. i-lete: An IoT-based physical stress monitoring framework for athletes. In Proceedings of the 23rd International Symposium on Quality Electronic Design (ISQED), Santa Jose, CA, USA, 6–7 April 2022; Volume 3, pp. 1–6. [Google Scholar]
- Sundaravadivel, P.; Ghosh, P.; Suwal, B. IoT-enabled Soft Robotics for Electrical Engineers. In Proceedings of the Great Lakes Symposium on VLSI, Irvine, CA, USA, 6–8 June 2022; pp. 329–332. [Google Scholar]
- Ghosh, P.; Riam, S.Z.; Ahmed, M.S.; Sundaravadivel, P. CMOS-Based Memristor Emulator Circuits for Low-Power Edge-Computing Applications. Electronics 2023, 12, 1654. [Google Scholar] [CrossRef]
- Sundaravadivel, P.; Fitzgerald, A.; Ghosh, P.; Ahmed, M.S. Hapt-Edge: Haptics in Soft Effectors for Smart Interactive Assistive Frameworks. J. Biomed. Sci. Instrum. 2022, 3, 162–167. [Google Scholar] [CrossRef]
- Lipomi, D.J.; Vosgueritchian, M.; Tee, B.C.; Hellstrom, S.L.; Lee, J.A.; Fox, C.H.; Bao, Z. Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes. Nat. Nanotechnol. 2011, 6, 788–792. [Google Scholar] [CrossRef] [PubMed]
- Yan, H.L.; Chen, Y.Q.; Deng, Y.Q.; Zhang, L.L.; Hong, X.; Lau, W.M.; Mei, J.; Hui, D.; Yan, H.; Liu, Y. Coaxial printing method for directly writing stretchable cable as strain sensor. Appl. Phys. Lett. 2016, 109, 083502. [Google Scholar] [CrossRef]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly stretchable and sensitive strain sensor based on silver nanowire–elastomer nanocomposite. ACS Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef]
- Lu, N.; Lu, C.; Yang, S.; Rogers, J. Highly sensitive skin-mountable strain gauges based entirely on elastomers. Adv. Funct. Mater. 2012, 22, 4044–4050. [Google Scholar] [CrossRef]
- Bae, S.H.; Lee, Y.; Sharma, B.K.; Lee, H.J.; Kim, J.H.; Ahn, J.H. Graphene-based transparent strain sensor. Carbon 2013, 51, 236–242. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Yang, T.; Li, X.; Zang, X.; Zhu, M.; Wang, K.; Wu, D.; Zhu, H. Wearable and highly sensitive graphene strain sensors for human motion monitoring. Adv. Funct. Mater. 2014, 24, 4666–4670. [Google Scholar] [CrossRef]
- Liu, C.X.; Choi, J.W. Analyzing resistance response of embedded PDMS and carbon nanotubes composite under tensile strain. Microelectron. Eng. 2014, 117, 1–7. [Google Scholar] [CrossRef]
- Lee, J.; Kim, S.; Lee, J.; Yang, D.; Park, B.C.; Ryu, S.; Park, I. A stretchable strain sensor based on a metal nanoparticle thin film for human motion detection. Nanoscale 2014, 6, 11932–11939. [Google Scholar] [CrossRef] [PubMed]
- Rahimi, R.; Ochoa, M.; Yu, W.; Ziaie, B. Highly stretchable and sensitive unidirectional strain sensor via laser carbonization. ACS Appl. Mater. Interfaces 2015, 7, 4463–4470. [Google Scholar] [CrossRef]
- Ren, J.; Wang, C.; Zhang, X.; Carey, T.; Chen, K.; Yin, Y.; Torrisi, F. Environmentally-friendly conductive cotton fabric as flexible strain sensor based on hot press reduced graphene oxide. Carbon 2017, 111, 622–630. [Google Scholar] [CrossRef]
- Yan, C.; Wang, J.; Kang, W.; Cui, M.; Wang, X.; Foo, C.Y.; Chee, K.J.; Lee, P.S. Highly stretchable piezoresistive graphene–nanocellulose nanopaper for strain sensors. Adv. Mater. 2014, 26, 2022–2027. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.S.; Jeong, Y.J.; Lee, B.K.; Shanmugasundaram, A.; Lee, D.W. Piezoresistive sensor-integrated PDMS cantilever: A new class of device for measuring the drug-induced changes in the mechanical activity of cardiomyocytes. Sens. Actuators B Chem. 2017, 240, 566–572. [Google Scholar] [CrossRef]
- Shi, G.; Zhao, Z.; Pai, J.H.; Lee, I.; Zhang, L.; Stevenson, C.; Ishara, K.; Zhang, R.; Zhu, H.; Ma, J. Highly sensitive, wearable, durable strain sensors and stretchable conductors using graphene/silicon rubber composites. Adv. Funct. Mater. 2016, 26, 7614–7625. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Name | Electrical Conductivity (S·m) | Thermal Conductivity (W·m·K) | Viscosity (Pa·s) |
|---|---|---|---|
| Mercury [14] | 1.06 × 10 | 8.54 | 1.5 × 10 |
| EGaIn [15] | 3.04 × 10 | 26.6 | 1.9 × 10 |
| Galinstan [16] | 3.04 × 10 | 16.5 | 2 × 10 |
| Properties | Galinstan |
|---|---|
| Melting point/°C | −19 |
| Boiling point/°C | >1300 |
| Vapor pressure/mmHg | <10 at 500 °C |
| Specific Heat/kJ·kg °C | 0.200 |
| Density/kgm | 6440 |
| Thermal | 16.5 |
| Surface tension/N·m | 0.718 at 25 °C |
| Solubility in water | Insoluble |
| Viscosity/Pa·s | 2.4 × 10 at 20 °C |
| Materials | Methods | Stretching (%) | GF | Linearity | Applications |
|---|---|---|---|---|---|
| EGaIn-PDMS [39] | Printing technology | 350 | 1.6-3.2 | partial | Wearable devices |
| AgNW-PDMS [40] | Micro-modeling | 70 | 2–14 | Partly linear | Motion detection |
| CNT-CB-PDMS [41] | Micromolding method | 22.6 | 29 | Nonlinear | Wound monitoring |
| Graphene-PDMS [42] | Coating techniques | 7.1 | 2.4–14 | linear | Wearable devices |
| GWFs-PDMS [43] | Coating techniques | 30 | 106 | Nonlinear | In vitro diagnostic |
| MWCNTs-PDMS [44] | Liquid phase | 45 | 1.2 | Nonlinear | Pressure measurement |
| AgNP-PDMS [45] | Printing technology | 20 | 4.7–12.5 | Two linear | Motions |
| CNT-PDMS [46] | Printing technology | 100 | 104 | Nonlinear | Bending angle |
| GO-PDMS [47] | Filtration method | (5–2.5 cm) | NA | Nonlinear | Human interactive |
| Graphene-PDMS [48] | Filtration method | 100 | 7.1 | Partly linear | Drug-induced changes |
| Ti/Au-PDMS [49] | Micromolding method | NA | NA | Nonlinear | Electronic skin |
| GnPs-PDMS [50] | Micromolding method | 10 | 27.7–164.5 | Nonlinear | Human–machine interface |
| This work | Micromolding method | 175 | 8.6 | Partly linear | Robotics, health monitoring |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghosh, P.K.; Sundaravadivel, P. Stretchable Sensors for Soft Robotic Grippers in Edge-Intelligent IoT Applications. Sensors 2023, 23, 4039. https://doi.org/10.3390/s23084039
Ghosh PK, Sundaravadivel P. Stretchable Sensors for Soft Robotic Grippers in Edge-Intelligent IoT Applications. Sensors. 2023; 23(8):4039. https://doi.org/10.3390/s23084039
Chicago/Turabian StyleGhosh, Prosenjit Kumar, and Prabha Sundaravadivel. 2023. "Stretchable Sensors for Soft Robotic Grippers in Edge-Intelligent IoT Applications" Sensors 23, no. 8: 4039. https://doi.org/10.3390/s23084039