
Increasing Vehicular Visible Light Communications Range Based on LED Current Overdriving and Variable Pulse Position Modulation: Concept and Experimental Validation

 , , ,
, , ,  and
and
Abstract
:1. Introduction
- ➢
- It proposes a new concept to improve the communication range of vehicular VLC systems; different from the existing approaches, which are mainly focused on the improvement of VLC receivers, this technique also exploits the benefits that can be provided by the VLC transmitter, further enhancing the communication range;
- ➢
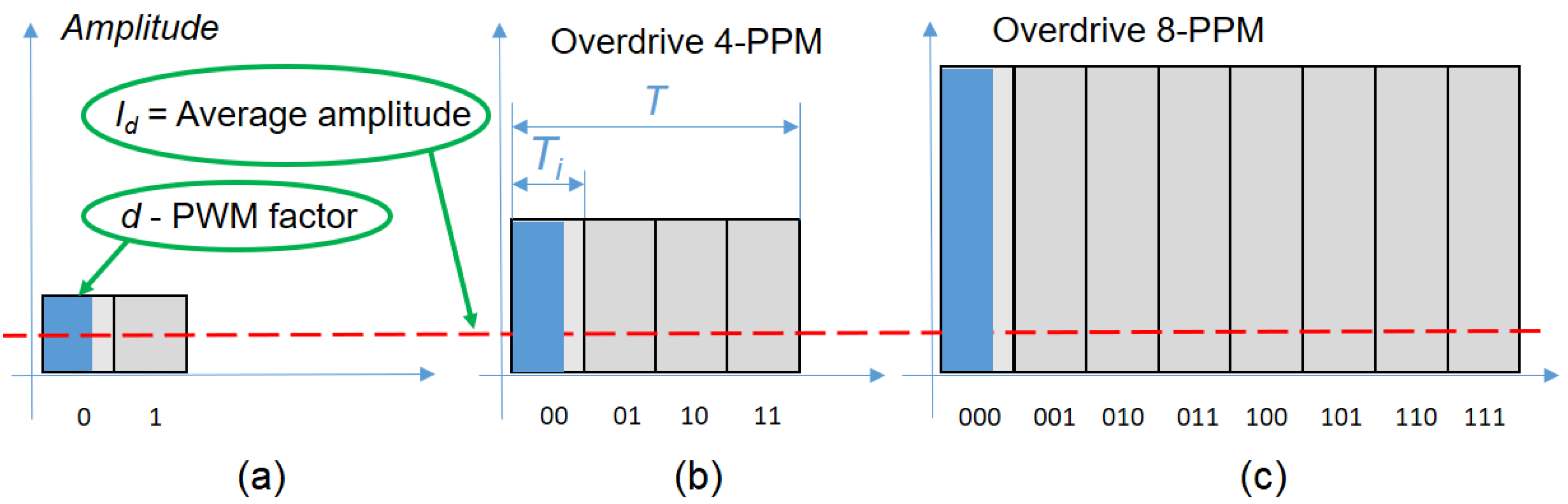
- It proposes an LED current overdrive mechanism compensated by a proportional ON time decrease at the VLC transmitter, ensuring higher instantaneous irradiance, while maintaining the overall irradiance within the limits imposed by the standardization norms or by the user requirements;
- ➢
- Different from most existing works that aim to introduce new concepts, this one provides a comprehensive set of experimental results that demonstrate range enhancement of up to 370%;
- ➢
- As far as we know, this is the first article which applies such a technique in vehicular VLC applications.
2. State-of-the-Art in Long-Range Vehicular Visible Light Communications
3. LED Current Overdriving: Proposed Concept Presentation
4. Design and Implementation of the Visible Light Communications System
5. Experimental Results
5.1. Experimental Procedure and Methods
5.2. Experimental Determinations concerning the Effect of an LED Overdrive Pulse Current Combined with a Proportionally Reduced Duty Cycle on the VLC Range
5.2.1. Braking Lights Scenario and Results
5.2.2. Parking Light Scenario and Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mateen, A.; Hanif, M.Z.; Khatri, N.; Lee, S.; Nam, S.Y. Smart Roads for Autonomous Accident Detection and Warnings. Sensors 2022, 22, 2077. [Google Scholar] [CrossRef] [PubMed]
- Torres-Zapata, E.; Guerra, V.; Rabadan, J.; Luna-Rivera, M.; Perez-Jimenez, R. VLC Network Design for High Mobility Users in Urban Tunnels. Sensors 2022, 22, 88. [Google Scholar] [CrossRef] [PubMed]
- Zadobrischi, E.; Negru, M. Applied Study of the Fluidization Model of Logistics Transportation through the Prism of the Impact Generated on the Environment. Sensors 2022, 22, 9255. [Google Scholar] [CrossRef]
- Zadobrischi, E. Intelligent Traffic Monitoring through Heterogeneous and Autonomous Networks Dedicated to Traffic Automation. Sensors 2022, 22, 7861. [Google Scholar] [CrossRef] [PubMed]
- Căilean, A.M.; Dimian, M. Current Challenges for Visible Light Communications Usage in Vehicle Applications: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2681–2703. [Google Scholar] [CrossRef]
- Memedi, A.; Dressler., F. Vehicular Visible Light Communications: A Survey. IEEE Commun. Surv. Tutor. 2021, 23, 161–181. [Google Scholar] [CrossRef]
- Zadobrischi, E.; Dimian, M.; Negru, M. The Utility of DSRC and V2X in Road Safety Applications and Intelligent Parking: Similarities, Differences, and the Future of Vehicular Communication. Sensors 2021, 21, 7237. [Google Scholar] [CrossRef]
- Caputo, S.; Mucchi, L.; Umair, M.A.; Meucci, M.; Seminara, M.; Catani, J. The Role of Bidirectional VLC Systems in Low-Latency 6G Vehicular Networks and Comparison with IEEE802.11p and LTE/5G C-V2X. Sensors 2022, 22, 8618. [Google Scholar] [CrossRef]
- Okasha, N.M.; Zekry, A.H.A.; Newagy, F.A. Developing hybrid car-to-car communication system based on MIMO visible light and radio frequency. J. Wireless Commun. Network 2022, 2022, 114. [Google Scholar] [CrossRef]
- Kahn, J.M.; Barry, J.R. Wireless infrared communications. Proc. IEEE 1997, 85, 265–298. [Google Scholar] [CrossRef] [Green Version]
- Eldeeb, H.B.; Elamassie, M.; Sait, S.M.; Uysal, M. Infrastructure-to-Vehicle Visible Light Communications: Channel Modelling and Performance Analysis. IEEE Trans. Veh. Technol. 2022, 71, 2240–2250. [Google Scholar] [CrossRef]
- Umair, M.A.; Meucci, M.; Catani, J. Strong Noise Rejection in VLC Links under Realistic Conditions through a Real-Time SDR Front-End. Sensors 2023, 23, 1594. [Google Scholar] [CrossRef] [PubMed]
- Siddique, A.; Delwar, T.S.; Ryu, J.-Y. A Novel Optimized V-VLC Receiver Sensor Design Using μGA in Automotive Applications. Sensors 2021, 21, 7861. [Google Scholar] [CrossRef] [PubMed]
- Okada, S.; Yendo, T.; Yamazato, T.; Fujii, T.; Tanimoto, M.; Kimura, Y. On-vehicle receiver for distant visible light road-to-vehicle communication. In Proceedings of the 2009 IEEE Intelligent Vehicles Symposium, Xi’an, China, 3–5 June 2009; pp. 1033–1038. [Google Scholar] [CrossRef]
- Căilean, A.M.; Dimian, M.; Done, A. Enhanced design of visible light communication sensor for automotive applications: Experimental demonstration of a 130 meters link. In Proceedings of the 2018 Global LIFI Congress (GLC), Paris, France, 8–9 February 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Avătămăniței, S.-A.; Beguni, C.; Căilean, A.-M.; Dimian, M.; Popa, V. Evaluation of Misalignment Effect in Vehicle-to-Vehicle Visible Light Communications: Experimental Demonstration of a 75 Meters Link. Sensors 2021, 21, 3577. [Google Scholar] [CrossRef]
- Avătămăniței, S.-A.; Căilean, A.-M.; Done, A.; Dimian, M.; Popa, V.; Prelipceanu, M. Design and Intensive Experimental Evaluation of an Enhanced Visible Light Communication System for Automotive Applications. Sensors 2020, 20, 3190. [Google Scholar] [CrossRef]
- Corsini., R.; Pelliccia, R.; Cossu, G.; Khalid, A.M.; Ghibaudi, M.; Petracca, M.; Pagano, P.; Ciaramella, E. Free space optical communication in the visible bandwidth for V2V safety critical protocols. In Proceedings of the 2012 8th International Wireless Communications and Mobile Computing Conference (IWCMC), Limassol, Cyprus, 27–31 August 2012; pp. 1097–1102. [Google Scholar] [CrossRef]
- Eso, E.; Ghassemlooy, Z.; Zvanovec, S.; Sathian, J.; Abadi, M.M.; Younus, O.I. Performance of Vehicular Visible Light Communications under the Effects of Atmospheric Turbulence with Aperture Averaging. Sensors 2021, 21, 2751. [Google Scholar] [CrossRef]
- Yahia, S.; Meraihi, Y.; Ramdane-Cherif, A.; Ho, T.D.; Eldeeb, H.B. Enhancement of Vehicular Visible Light Communication Using Spherical Detector and Custom Lens Combinations. IEEE Access 2023, 11, 21600–21611. [Google Scholar] [CrossRef]
- Yamazato, T.; Takai, I.; Okada, H.; Fujii, T.; Yendo, T.; Arai, S.; Andoh, M.; Harada, T.; Yasutomi, K.; Kagawa, K.; et al. Image-sensor-based visible light communication for automotive applications. IEEE Commun. Mag. 2014, 52, 88–97. [Google Scholar] [CrossRef]
- Căilean, A.-M.; Dimian, M. Toward Environmental-Adaptive Visible Light Communications Receivers for Automotive Applications: A Review. IEEE Sens. J. 2016, 16, 2803–2811. [Google Scholar] [CrossRef]
- Căilean, A.-M.; Dimian, M.; Popa, V. Noise-Adaptive Visible Light Communications Receiver for Automotive Applications: A Step Toward Self-Awareness. Sensors 2020, 20, 3764. [Google Scholar] [CrossRef]
- Shen, W.; Tsai, H. Testing vehicle-to-vehicle visible light communications in real-world driving scenarios. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC), Torino, Italy, 27–29 November 2017; pp. 187–194. [Google Scholar]
- Căilean, A.-M.; Beguni, C.; Avătămăniţei, S.-A.; Dimian, M. Experimental Demonstration of a 185 meters Vehicular Visible Light Communications Link. In Proceedings of the 2021 IEEE Photonics Conference (IPC), Vancouver, BC, Canada, 18–21 October 2021; pp. 1–2. [Google Scholar] [CrossRef]
- Căilean, A.-M.; Avătămăniţei, S.-A.; Beguni, C.; Popa, V.; Dimian, M. Experimental Demonstration of a 188 meters Infrastructure-to-Vehicle Visible Light Communications Link in Outdoor Conditions. In Proceedings of the 2021 IEEE Sensors Applications Symposium (SAS), Sundsvall, Sweden, 23–25 August 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Y.; Chi, N. Long-range high-speed visible light communication system over 100-m outdoor transmission utilizing receiver diversity technology. Opt. Eng. 2016, 55, 56104. [Google Scholar] [CrossRef]
- Cailean, A.; Dimian, M. Impact of IEEE 802.15.7 Standard on Visible Light Communications Usage in Automotive Applications. IEEE Commun. Mag. 2017, 55, 169–175. [Google Scholar] [CrossRef]
- Kumar, N.; Lourenço, N.; Terra, D.; Alves, L.N.; Aguiar, R.L. Visible light communications in intelligent transportation systems. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Madrid, Spain, 3–7 June 2012; pp. 748–753. [Google Scholar] [CrossRef]
- Costanzo, A.; Loscri, V. Adaptive Energy Saving Technique with Saturation Avoidance for Outdoor VLC. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Eldeeb, H.B.; Yanmaz, E.; Uysal, M. MAC Layer Performance of Multi-Hop Vehicular VLC Networks with CSMA/CA. In Proceedings of the IEEE 2020 12th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Porto, Portugal, 20–22 July 2020; pp. 1–6. [Google Scholar]
- Nawaz, T.; Seminara, M.; Caputo, S.; Mucchi, L.; Cataliotti, F.S.; Catani, J. IEEE 802.15.7-Compliant Ultra-Low Latency Relaying VLC System for Safety-Critical ITS. IEEE Trans. Veh. Technol. 2019, 68, 12040–12051. [Google Scholar] [CrossRef] [Green Version]
- Demir, M.S.; Eldeeb, H.; Uysal, M. Relay-assisted handover technique for vehicular VLC networks. ITU J. Future Evol. Technol. 2022, 3, 11–19. [Google Scholar] [CrossRef]
- Beguni, C.; Căilean, A.-M.; Avătămăniței, S.-A.; Dimian, M. Analysis and Experimental Investigation of the Light Dimming Effect on Automotive Visible Light Communications Performances. Sensors 2021, 21, 4446. [Google Scholar] [CrossRef]
- Shi, X.; Sun, Y.; Tian, J.; Chen, M.; Liu, Y.; Xie, N.; Zhang, J. BER Performance Analysis of Non-Coherent Q-Ary Pulse Position Modulation Receivers on AWGN Channel. Sensors 2021, 21, 6102. [Google Scholar] [CrossRef]
- Todorov, D.; Mashkov, P.; Gyoch, B.; Mihaylov, N. A study on thermal performance of LED signal heads using infrared thermography. Trans. Motauto World 2017, 2, 33–36. [Google Scholar]
- LR G6SP.01 Advanced Power TOPLED®. Available online: https://dammedia.osram.info/media/resource/hires/osram-dam-5343679/LR%20G6SP.01_EN.pdf (accessed on 31 January 2023).
- Stewart, J.; Swanson, D. LED Drive Modules for Automotive Rear Combination Lamps; SAE Technical Paper 2001-01-0448; SAE International: Warrendale, PA, USA, 2001. [Google Scholar] [CrossRef]
- Bęczkowski, S.; Munk-Nielsen, S. Led Spectral and Power Characteristics under Hybrid Pwm/Am Dimming Strategy. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 1 November 2010. [Google Scholar]
- Jbari, M.E.; Moussaoui, M. Efficient n-M-PAWM hybrid modulation scheme for high data transmission in visible light communication system. E-Prime Adv. Electr. Eng. Electron. Energy 2022, 2, 100061. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Liu, Z.; Lee, H.; Khyam, M.O.; He, J.; Pesch, D.; Moessner, K.; Saad, W.; Poor, H.V. 6G for Vehicle-to-Everything (V2X) Communications: Enabling Technologies, Challenges, and Opportunities. Proc. IEEE 2022, 110, 712–734. [Google Scholar] [CrossRef]
- Zhang, Z.; Xiao, Y.; Ma, Z.; Xiao, M.; Ding, Z.; Lei, X.; Karagiannidis, G.K.; Fan, P. 6G Wireless Networks: Vision, Requirements, Architecture, and Key Technologies. IEEE Veh. Technol. Mag. 2019, 14, 28–41. [Google Scholar] [CrossRef]
- Chi, N.; Zhou, Y.; Wei, Y.; Hu, F. Visible Light Communication in 6G: Advances, Challenges, and Prospects. IEEE Veh. Technol. Mag. 2020, 15, 93–102. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Application Type | Maximum Range [m] | Approach to Improve Communication Range |
|---|---|---|---|---|
| [14] | 2008 | I2V | 90 | Long communication range is achieved based on an extremely narrow 1.3° FoV; |
| [18] | 2012 | I2V | 31 | By adjusting the VLC transmitter emission angle from 120° to 18° and by using a 25 mm focal length lens, communication range is increased from 1 to 31 m; |
| [29] | 2012 | I2V | 50 | Medium communication range provided without totally giving up FoV or robustness to noise; Custom made VLC transmitter with an optimized radiation pattern is used; |
| [21] | 2014 | I2V | 110 | VLC receiver prototype based on a 1000 fps CMOS sensor is used; |
| [27] | 2016 | I2V | 100 | One of the first VLC prototypes able to provide Mb/s data rates and long communication ranges based on a receiver; |
| [15] | 2018 | I2V | 130 | Logarithmic transimpedance circuit and narrow FoV; Custom made VLC transmitter with optical irradiance above standard values; |
| [16] | 2021 | V2V | 75 | One of the longest ranges reported for a standard irradiance vehicle rear light/standard irradiance traffic light/standard irradiance vehicle front light VLC transmitter. The communications range has been achieved based on an improved VLC receiver design; |
| [26] | 2021 | I2V | 188 | |
| [25] | 2021 | V2V | 185 | |
| This work | 2023 | V2V; I2V and indoor applications compatible as well | 25.2 | The communication range is enhanced by up to 370% by increasing the instantaneous optical irradiance, while adjusting the LED on time with the purpose of ensuring the same average optical irradiance and protecting the LED from overheating. |
| Parameter | Feature/Values |
|---|---|
| Optical source | 3 × LR G6SP.01 (OSRAM red LED) |
| Emitted irradiance at 1 m distance | ≅6 μW/cm2 for parking light ≅90 μW/cm2 for braking light |
| VLC emitter’s central wavelength | 623 nm |
| Modulation technique | OOK |
| Coding technique | Modified VPPM [34] |
| Data rate | 10 kb/s |
| VLC channel conditions | Indoor condition (laboratory), with natural and artificial fluorescent light and a total irradiance of ≅70 μW/cm2 |
| Encoding hardware | Microcontroller board based on an ARM Cortex M7 processor at 600 MHz |
| VLC Receiver Blocks | Parameter | Values/Features |
|---|---|---|
| Front-end | VLC receiver’s FoV | ±20° due to the optical collector |
| VLC optical photodetector | PDA100A2 switchable gain detector | |
| Optical filter dominant wavelength | 645 ± 40 nm | |
| Signal regeneration | Amplifier’s gain | 400, with automatic gain control |
| Signal filtering |
| |
| Square signal reconstruction | Schmitt trigger circuit | |
| Data processing | Hardware | Microcontroller board based on an ARM Cortex M7 processor at 1.008 GHz |
| Data processing | Based on rising and falling edge identification and pulse width measurement | |
| Data decoding | Real-time extraction for data modulated using OOK, with data rate of 10 kb/s | |
| Monitored parameters | Real-time BER computing without forward error correcting codes | |
| Other VLC receiver parameters | Dimming factor | 1–40% |
| Parameter | Feature/Values |
|---|---|
| Testing conditions | High SNR laboratory conditions |
| Dimming factor |
|
| VLC emitter | 623 nm red LEDs |
| Emitter–Receiver (V2V) distance | Variable, in 10 cm steps |
| VLC receiver | PIN Photodiode-based |
| Ambient light | 48 μW/cm2 |
| Modulation technique | Modified VPPM as per [34] |
| Data rate | 10 kb/s |
| Measured parameter | Real-time BER determination without the use of FEC protocols, and LoF alert |
| Equipment Type | Model |
|---|---|
| Irradiance meter | Delta Ohm HD 2302.0 with LP 471 RAD Probe |
| Multimeter | Fluke 175 true RMS |
| Optical spectrometer analyzer | Sekonic C-800 |
| Oscilloscope | Tektronix TBS 2104 |
| Modulation | Data Rate (kB/s) | BER | Conditions | Duty Cycle | Pulse Current (mA) | Emitter Irradiance (μW/cm2) | VLC Distance (m) |
|---|---|---|---|---|---|---|---|
| Modified VPPM | 10 | <10−6 | 48 μW/cm2 ambient light: daylight in indoor conditions with fluorescent light sources on | 50% | 350 | 90.2 | 7.7 |
| 40% | 438 | 89.7 | 11.3 | ||||
| 30% | 583 | 88.5 | 13.4 | ||||
| 20% | 875 | 88.4 | 16.8 |
| Modulation | Data Rate (kB/s) | BER | Conditions | Duty Cycle | Pulse Current (mA) | Emitter Irradiance (μW/cm2) | VLC Distance (m) |
|---|---|---|---|---|---|---|---|
| Modified VPPM | 10 | <10−6 | 48 μW/cm2 ambient light: daylight in indoor conditions with fluorescent light sources on | 10% | 100 | 5.65 | 6.8 |
| 9% | 111 | 5.61 | 7.3 | ||||
| 8% | 125 | 5.75 | 7.9 | ||||
| 7% | 143 | 5.98 | 8.9 | ||||
| 6% | 167 | 6.01 | 9.9 | ||||
| 5% | 200 | 5.96 | 11.0 | ||||
| 4% | 250 | 5.87 | 13.0 | ||||
| 3% | 333 | 5.82 | 15.3 | ||||
| 2% | 500 | 5.81 | 19.1 | ||||
| 1% | 1000 | 5.3 | 25.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beguni, C.; Căilean, A.-M.; Avătămăniței, S.-A.; Potorac, A.-D.; Zadobrischi, E.; Dimian, M. Increasing Vehicular Visible Light Communications Range Based on LED Current Overdriving and Variable Pulse Position Modulation: Concept and Experimental Validation. Sensors 2023, 23, 3656. https://doi.org/10.3390/s23073656
Beguni C, Căilean A-M, Avătămăniței S-A, Potorac A-D, Zadobrischi E, Dimian M. Increasing Vehicular Visible Light Communications Range Based on LED Current Overdriving and Variable Pulse Position Modulation: Concept and Experimental Validation. Sensors. 2023; 23(7):3656. https://doi.org/10.3390/s23073656
Chicago/Turabian StyleBeguni, Cătălin, Alin-Mihai Căilean, Sebastian-Andrei Avătămăniței, Alin-Dan Potorac, Eduard Zadobrischi, and Mihai Dimian. 2023. "Increasing Vehicular Visible Light Communications Range Based on LED Current Overdriving and Variable Pulse Position Modulation: Concept and Experimental Validation" Sensors 23, no. 7: 3656. https://doi.org/10.3390/s23073656