
A Comprehensive Investigation on Multi-User Interference Effects in Vehicular Visible Light Communications

 ,
,  ,
,
Abstract
:1. Introduction
2. Analytical Evaluation of Multi-User Interference in Vehicular Visible Light Communications Applications
2.1. Defining the Packet Delivery Requirements
2.2. Performance Modeling in One-User Interference Conditions
2.3. Performance Modeling in Multi-User Interference Conditions
3. Discussion on the Vehicular Visible Light Communication Prototype Used for the Experimental Evaluation
3.1. Debate on the Visible Light Communications Prototype Used for the Experimental Evaluation
3.2. Evaluating the Vehicular VLC Link in Friendly Conditions
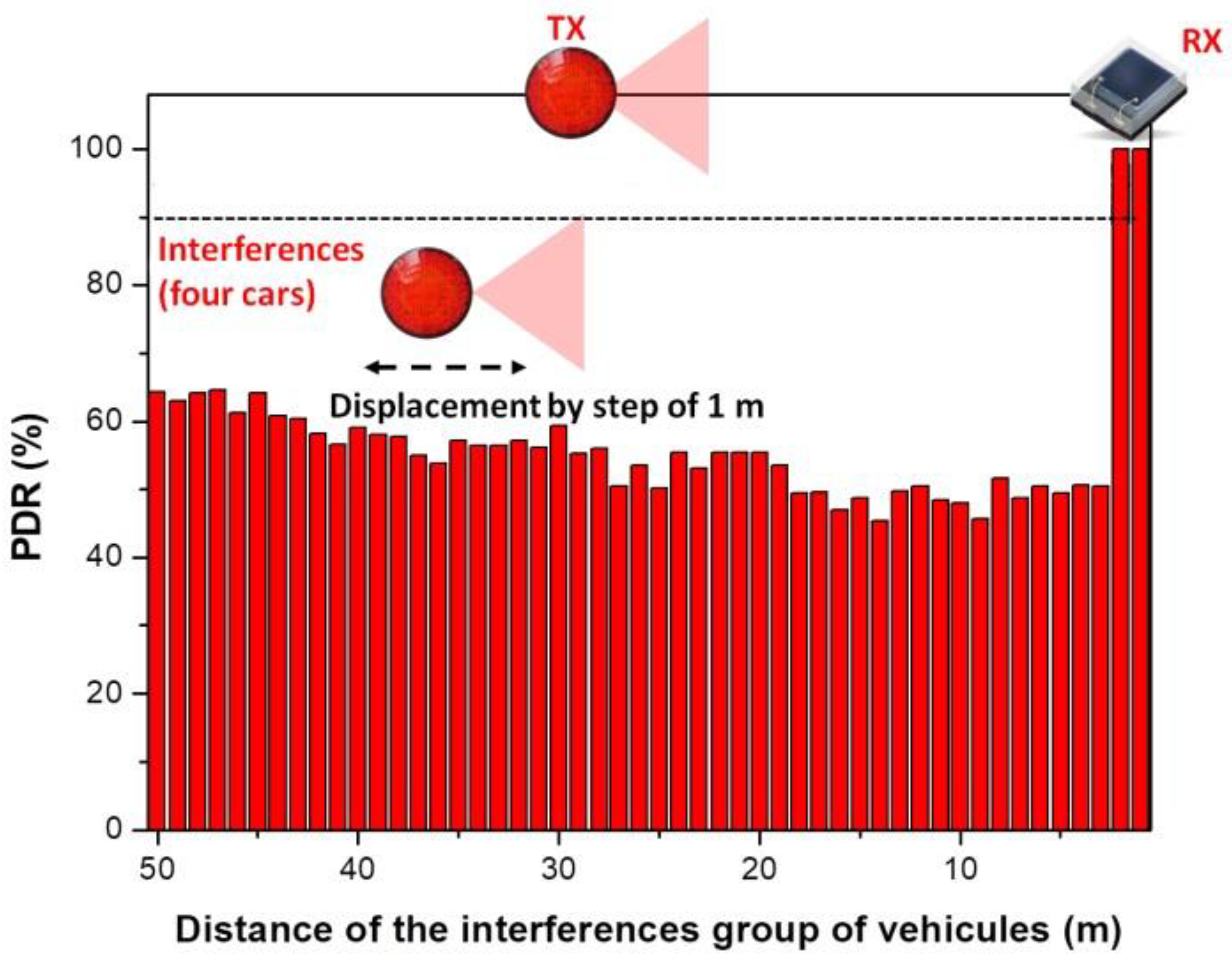
3.3. Evaluating the Vehicular VLC Link in Interference Conditions
3.4. Debate on the Experimental Results and Article Findings
3.5. Multi-User Interference Mitigation Techniques in Vehicular Visible Light Communications Networks
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- U.S. Department of Transportation. Vehicle Safety Communications Project Task 3 Final Report; CAMP, Veh. Safety Commun. Consortium, Tech. Rep. DOTHS 809 859; National Technical Information Service: Springfield, Virginia, 2005.
- U.S. Department of Transportation Research and Innovative Technology Administration. Report: Frequency of Target Crashes for IntelliDrive Safety Systems; Tech. Rep. DOT HS 811 381; Volpe National Transportation Systems Center: Cambridge, MA, USA, 2010.
- Zadobrischi, E. Intelligent Traffic Monitoring through Heterogeneous and Autonomous Networks Dedicated to Traffic Automation. Sensors 2022, 22, 7861. [Google Scholar] [CrossRef]
- Boban, M.; Kousaridas, A.; Manolakis, K.; Eichinger, J.; Xu, W. Connected Roads of the Future: Use Cases, Requirements, and Design Considerations for Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2018, 13, 110–123. [Google Scholar] [CrossRef]
- Lyu, F.; Zhu, H.; Cheng, N.; Zhou, H.; Xu, W.; Li, M.; Shen, X. Characterizing Urban Vehicle-to-Vehicle Communications for Reliable Safety Applications. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2586–2602. [Google Scholar] [CrossRef] [Green Version]
- Hafeez, K.A.; Zhao, L.; Ma, B.; Mark, J.W. Performance Analysis and Enhancement of the DSRC for VANET’s Safety Applications. IEEE Trans. Veh. Technol. 2013, 62, 3069–3083. [Google Scholar] [CrossRef]
- Cailean, A.; Cagneau, B.; Chassagne, L.; Popa, V.; Dimian, M. A survey on the usage of DSRC and VLC in communication-based vehicle safety applications. In Proceedings of the IEEE 21st Symposium on Communications and Vehicular Technology in the Benelux (SCVT), Delft, The Netherlands, 10 November 2014; pp. 69–74. [Google Scholar] [CrossRef]
- Ucar, S.; Ergen, S.C.; Ozkasap, O. Multihop-Cluster-Based IEEE 802.11p and LTE Hybrid Architecture for VANET Safety Message Dissemination. IEEE Trans. Veh. Technol. 2016, 65, 2621–2636. [Google Scholar] [CrossRef] [Green Version]
- Ucar, S.; Ergen, S.C.; Ozkasap, O. IEEE 802.11p and Visible Light Hybrid Communication Based Secure Autonomous Platoon. IEEE Trans. Veh. Technol. 2018, 67, 8667–8681. [Google Scholar] [CrossRef]
- Căilean, A.M.; Dimian, M. Current Challenges for Visible Light Communications Usage in Vehicle Applications: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2681–2703. [Google Scholar] [CrossRef]
- Memedi, A.; Dressler, F. Vehicular Visible Light Communications: A Survey. IEEE Commun. Surv. Tutor. 2021, 23, 161–181. [Google Scholar] [CrossRef]
- Cheng, L.; Viriyasitavat, W.; Boban, M.; Tsai, H. Comparison of Radio Frequency and Visible Light Propagation Channels for Vehicular Communications. IEEE Access 2018, 6, 2634–2644. [Google Scholar] [CrossRef]
- Umair, M.A.; Meucci, M.; Catani, J. Strong Noise Rejection in VLC Links under Realistic Conditions through a Real-Time SDR Front-End. Sensors 2023, 23, 1594. [Google Scholar] [CrossRef]
- Avătămăniței, S.A.; Căilean, A.M.; Zadobrischi, E.; Done, A.; Dimian, M.; Popa, V. Intensive Testing of Infrastruc-ture-to-Vehicle Visible Light Communications in Real Outdoor Scenario: Evaluation of a 50 m link in Direct Sun Exposure. In Proceedings of the 2019 Global LIFI Congress (GLC), Paris, France, 12–13 June 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Avătămăniței, S.A.; Căilean, A.-M.; Done, A.; Dimian, M.; Prelipceanu, M. Noise Resilient Outdoor Traffic Light Visible Light Communications System Based on Logarithmic Transimpedance Circuit: Experimental Demonstration of a 50 m Reliable Link in Direct Sun Exposure. Sensors 2020, 20, 909. [Google Scholar] [CrossRef] [Green Version]
- Căilean, A.-M.; Beguni, C.; Avătămăniţei, S.-A.; Dimian, M. Experimental Demonstration of a 185 meters Vehicular Visible Light Communications Link. In Proceedings of the 2021 IEEE Photonics Conference (IPC), Vancouver, BC, Canada, 18–21 October 2021; pp. 1–2. [Google Scholar] [CrossRef]
- Căilean, A.-M.; Avătămăniţei, S.-A.; Beguni, C.; Popa, V.; Dimian, M. Experimental Demonstration of a 188 meters Infrastructure-to-Vehicle Visible Light Communications Link in Outdoor Conditions. In Proceedings of the 2021 IEEE Sensors Applications Symposium (SAS), Sundsvall, Sweden, 23–25 August 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Nawaz, T.; Seminara, M.; Caputo, S.; Mucchi, L.; Cataliotti, F.S.; Catani, J. IEEE 802.15.7-Compliant Ultra-Low Latency Relaying VLC System for Safety-Critical ITS. IEEE Trans. Veh. Technol. 2019, 68, 12040–12051. [Google Scholar] [CrossRef] [Green Version]
- Beguni, C.; Căilean, A.-M.; Avătămăniței, S.-A.; Dimian, M. Analysis and Experimental Investigation of the Light Dimming Effect on Automotive Visible Light Communications Performances. Sensors 2021, 21, 4446. [Google Scholar] [CrossRef]
- Béchadergue, B.; Chassagne, L.; Guan, H. Simultaneous Visible Light Communication and Distance Measurement Based on the Automotive Lighting. IEEE Trans. Intell. Veh. 2019, 4, 532–547. [Google Scholar] [CrossRef]
- Singh, P.; Jeon, H.; Yun, S.; Kim, B.W.; Sung-Yoon, J. Vehicle positioning based on optical camera communication in V2I environments. Comput. Mater. Contin. 2022, 72, 2927–2945. [Google Scholar] [CrossRef]
- Avătămăniței, S.-A.; Beguni, C.; Căilean, A.-M.; Dimian, M.; Popa, V. Evaluation of Misalignment Effect in Vehicle-to-Vehicle Visible Light Communications: Experimental Demonstration of a 75 Meters Link. Sensors 2021, 21, 3577. [Google Scholar] [CrossRef]
- Makvandi, A.; Kavian, Y.S.; Namjoo, E. Experimental demonstration of hidden node problem in visible light communication networks. J. Opt. Commun. Netw. 2022, 14, 691–701. [Google Scholar] [CrossRef]
- Caveney, D. Cooperative Vehicular Safety Applications. IEEE Control. Syst. Mag. 2010, 30, 38–53. [Google Scholar] [CrossRef]
- Abualhoul, M.Y.; Shagdar, O.; Nashashibi, F. Visible Light inter-vehicle Communication for platooning of autonomous vehicles. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 508–513. [Google Scholar] [CrossRef] [Green Version]
- Béchadergue, B.; Chassagne, L.; Guan, H. Suitability of visible light communication for platooning applications: An experimental study. In Proceedings of the 2018 Global LIFI Congress (GLC), Paris, France, 8–9 February 2018; pp. 1–6. [Google Scholar]
- Khoder, R.; Naja, R.; Tohme, S. Impact of Interference on Visible Light Communication Performance in a Vehicular Platoon. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 1935–1939. [Google Scholar] [CrossRef]
- Torres-Zapata, E.; Guerra, V.; Rabadan, J.; Luna-Rivera, M.; Perez-Jimenez, R. MAC/PHY Comprehensive Visible Light Communication Networks Simulation. Sensors 2020, 20, 6014. [Google Scholar] [CrossRef]
- Memedi, A.; Dressler, F. A Location-Aware Cross-Layer MAC Protocol for Vehicular Visible Light Communications. In Proceedings of the 2021 17th International Conference on Mobility, Sensing and Networking (MSN), Exeter, UK, 13–15 December 2021; pp. 536–542. [Google Scholar] [CrossRef]
- Plascencia, E.; Shagdar, O.; Guan, H.; Barrois, O.; Chassagne, L. Optical CDMA MAC Evaluation in Vehicle-to-Vehicle Visible Light Communications. Electronics 2022, 11, 1454. [Google Scholar] [CrossRef]
- Plascencia, E.; Shagdar, O.; Guan, H.; Chassagne, L. Study on Multi-User Interferences in Vehicle to Vehicle Visible Light Communications. In Proceedings of the 2020 9th International Conference on Advances in Vehicular Systems, Technologies and Applications, Porto, Portugal, 18–22 October 2020; pp. 1–6. [Google Scholar]
- Marshoud, H.; Sofotasios, P.C.; Muhaidat, S.; Karagiannidis, G.K. Multi-user techniques in visible light communications: A survey. In Proceedings of the 2016 International Conference on Advanced Communication Systems and Information Security (ACOSIS), Marrakesh, Morocco, 17–19 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Plascencia, E.; Guan, H.; Chassagne, L.; Căilean, A.-M.; Shagdar, O. Addressing Multi-User Interference in Vehicular Visible Light Communications Applications: Evaluation of Optical CDMA MAC Utilization in a Multi-Lane Scenario. Sensors 2023, 23. to be submitted. [Google Scholar]
- Kahn, J.M.; Barry, J.R. Wireless infrared communications. Proc. IEEE 1997, 85, 265–298. [Google Scholar] [CrossRef] [Green Version]
- Căilean, A.M.; Dimian, M. Impact of IEEE 802.15.7 Standard on Visible Light Communications Usage in Automotive Applications. IEEE Commun. Mag. 2017, 55, 169–175. [Google Scholar] [CrossRef]
- Kavehrad, M.; Aminikashani, R. Visible Light Communication Based Indoor Localization; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Zhang, J.; Cheng, L.; Marsic, I. Models for non-intrusive estimation of wireless link bandwidth. In IFIP International Conference on Personal Wireless Communications; Springer: Berlin/Heidelberg, Germany, 2003; pp. 334–348. [Google Scholar]
- Ghassemlooy, Z.; Popoola, W.; Rajbhandari, S. Optical Wireless Communications: System and Channel Modelling with Matlab®; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Salter, R.J. Highway Traffic Analysis and Design; Macmillan International Higher Education: Basingstoke, UK, 1996. [Google Scholar]
- Shagdar, O.; Nashashibi, F.; Tohme, S. Performance study of CAM over IEEE 802.11p for cooperative adaptive cruise control. In Proceedings of the 2017 Wireless Days, Porto, Portugal, 29–31 March 2017; pp. 70–76. [Google Scholar] [CrossRef] [Green Version]
- Beaglebone Black. 2021. Available online: https://beagleboard.org/black (accessed on 21 June 2022).
- Galisteo, A.; Juara, D.; Giustiniano, D. Research in Visible Light Communication Systems with OpenVLC1.3. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019; pp. 539–544. [Google Scholar] [CrossRef] [Green Version]
- Eldeeb, H.B.; Eso, E.; Uysal, M.; Ghassemlooy, Z.; Zvanovec, S.; Sathian, J. Vehicular Visible Light Communications: The Impact of Taillight Radiation Pattern. In Proceedings of the 2020 IEEE Photonics Conference (IPC), Vancouver, BC, Canada, 28 September–1 October 2020; pp. 1–2. [Google Scholar] [CrossRef]
- Eldeeb, H.B.; Eso, E.; Jarchlo, E.A.; Zvanovec, S.; Uysal, M.; Ghassemlooy, Z.; Sathian, J. Vehicular VLC: A Ray Tracing Study Based on Measured Radiation Patterns of Commercial Taillights. IEEE Photonics Technol. Lett. 2021, 33, 904–907. [Google Scholar] [CrossRef]
- Căilean, A.M.; Dimian, M. Toward Environmental-Adaptive Visible Light Communications Receivers for Automotive Applications: A Review. IEEE Sens. J. 2016, 16, 2803–2811. [Google Scholar] [CrossRef]
- Căilean, A.-M.; Dimian, M.; Popa, V. Noise-Adaptive Visible Light Communications Receiver for Automotive Applications: A Step Toward Self-Awareness. Sensors 2020, 20, 3764. [Google Scholar] [CrossRef]
- Al-Ahmadi, S.; Maraqa, O.; Uysal, M.; Sait, S.M. Multi-User Visible Light Communications: State-of-the-Art and Future Directions. IEEE Access 2018, 6, 70555–70571. [Google Scholar] [CrossRef]
- Zhang, X.; Babar, X.; Petropoulos, P.; Haas, H.; Hanzo, L. The Evolution of Optical OFDM. IEEE Commun. Surv. Tutor. 2021, 23, 1430–1457. [Google Scholar] [CrossRef]
- Tebruegge, C.; Memedi, A.; Dressler, F. Reduced Multiuser-Interference for Vehicular VLC Using SDMA and Matrix Headlights. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| PD reference | SFH-206 k |
| Ar | 7.02 mm2 |
| PD efficiency | 0.62 A/W |
| VLC receiver FOV (ψe) | 60° |
| LED half angle (α) | 20° |
| LED-PD lateral distance (dL) | 3 m |
| Vehicle width (dw) | 2 m |
| Vehicle length (dlen) | 4.5 m |
| PD capacitance | 72 pF/m2 |
| Transmission frequency | 500 kHz |
| Transmission power | 2 Watt (vehicle tail-light) |
| Packet size (Lb) | 100 bits |
| Lane width (LW) | 3.7 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Plascencia, E.; Guan, H.; Chassagne, L.; Barrois, O.; Shagdar, O.; Căilean, A.-M. A Comprehensive Investigation on Multi-User Interference Effects in Vehicular Visible Light Communications. Sensors 2023, 23, 2553. https://doi.org/10.3390/s23052553
Plascencia E, Guan H, Chassagne L, Barrois O, Shagdar O, Căilean A-M. A Comprehensive Investigation on Multi-User Interference Effects in Vehicular Visible Light Communications. Sensors. 2023; 23(5):2553. https://doi.org/10.3390/s23052553
Chicago/Turabian StylePlascencia, Emmanuel, Hongyu Guan, Luc Chassagne, Olivier Barrois, Oyunchimeg Shagdar, and Alin-Mihai Căilean. 2023. "A Comprehensive Investigation on Multi-User Interference Effects in Vehicular Visible Light Communications" Sensors 23, no. 5: 2553. https://doi.org/10.3390/s23052553