
Evaluation of Low-Complexity Adaptive Full Direct-State Kalman Filter for Robust GNSS Tracking †

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
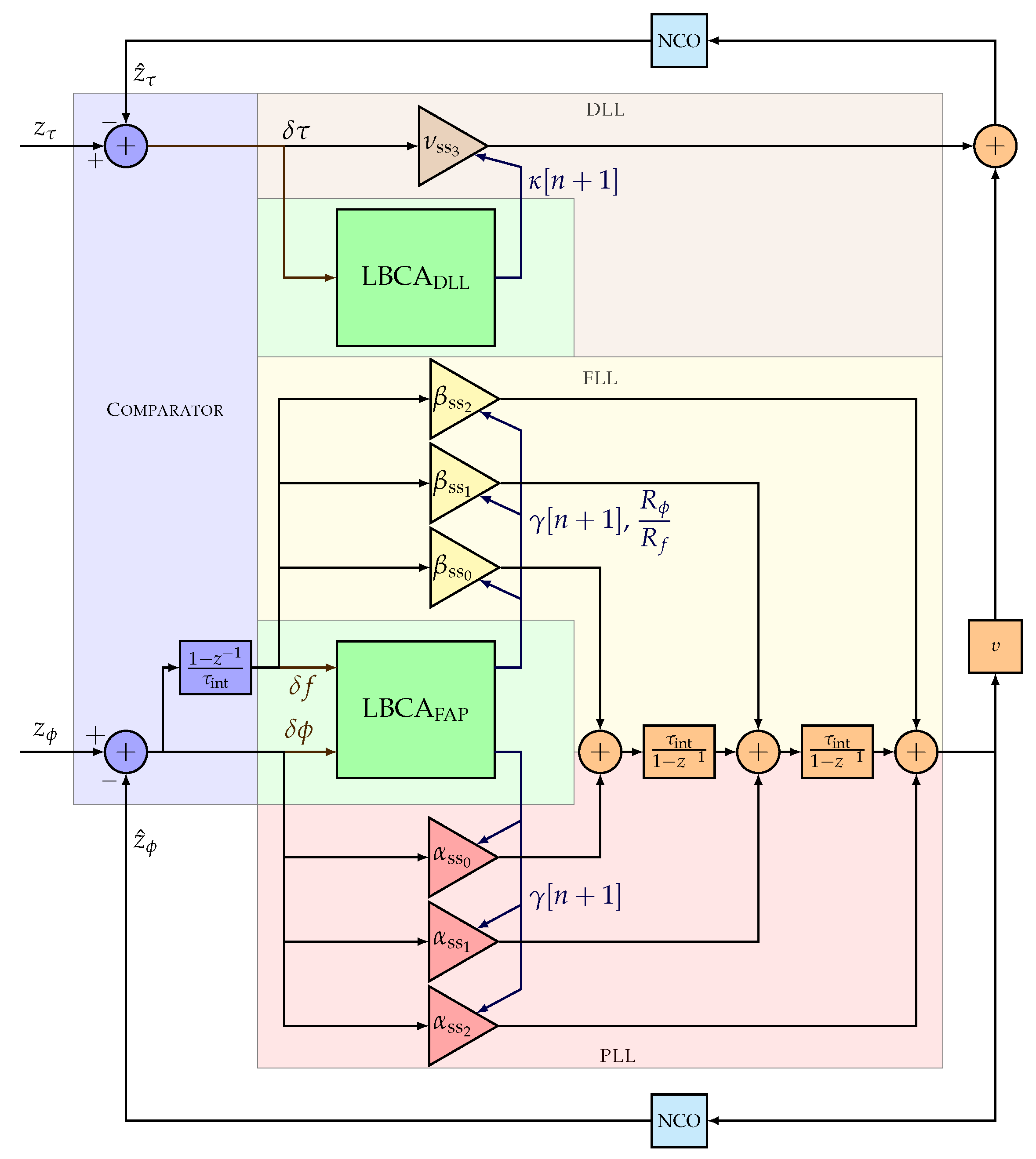
2. Full Direct-State Kalman Filter in Tracking Stage
2.1. Analog Domain
2.2. Digital Domain
3. Adaptive Full Direct-State Kalman Filter
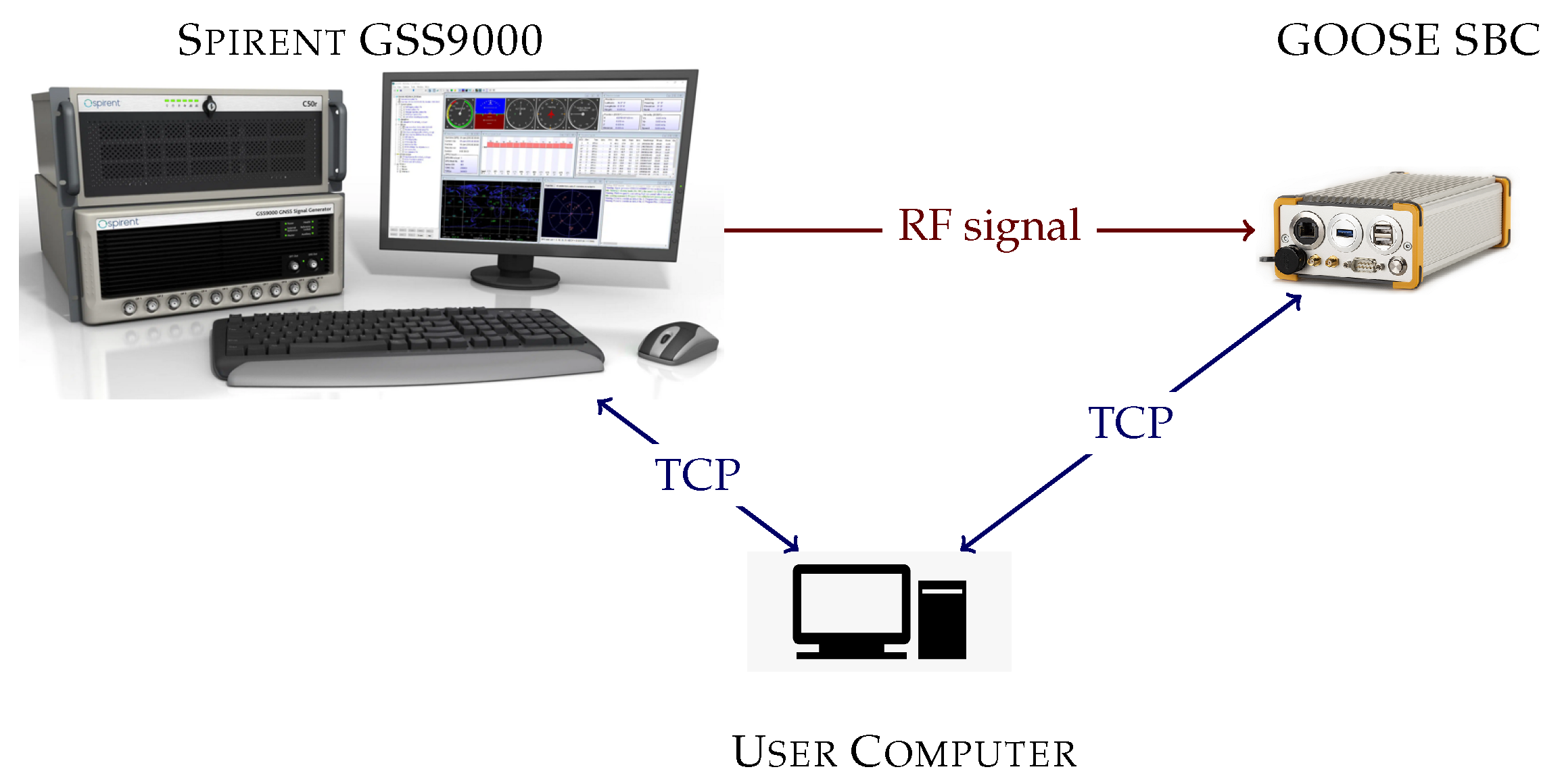
4. Experimental Setup
4.1. GNSS Receiver
4.2. System Performance Metric
4.3. Evaluation Setup
5. Results
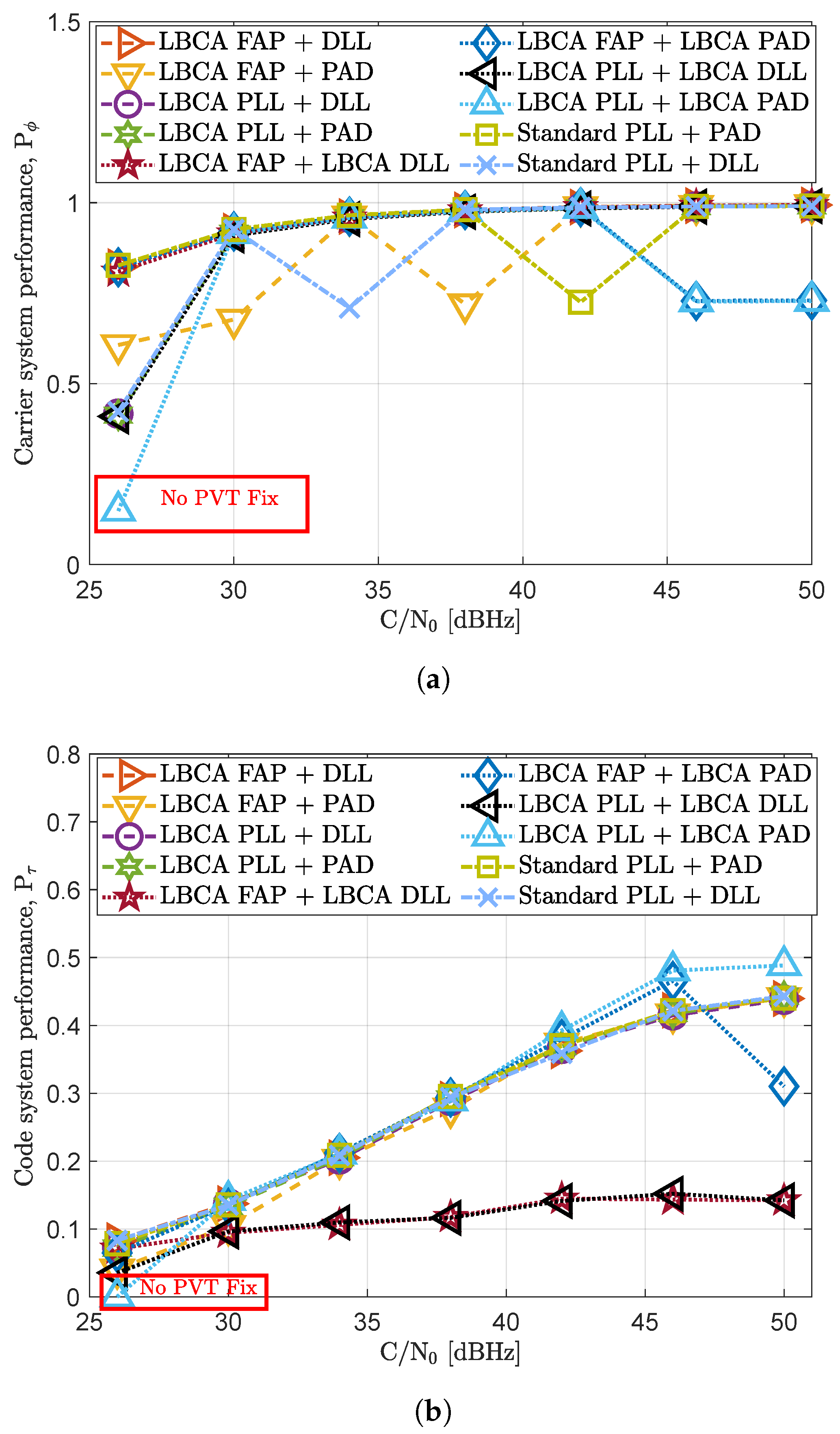
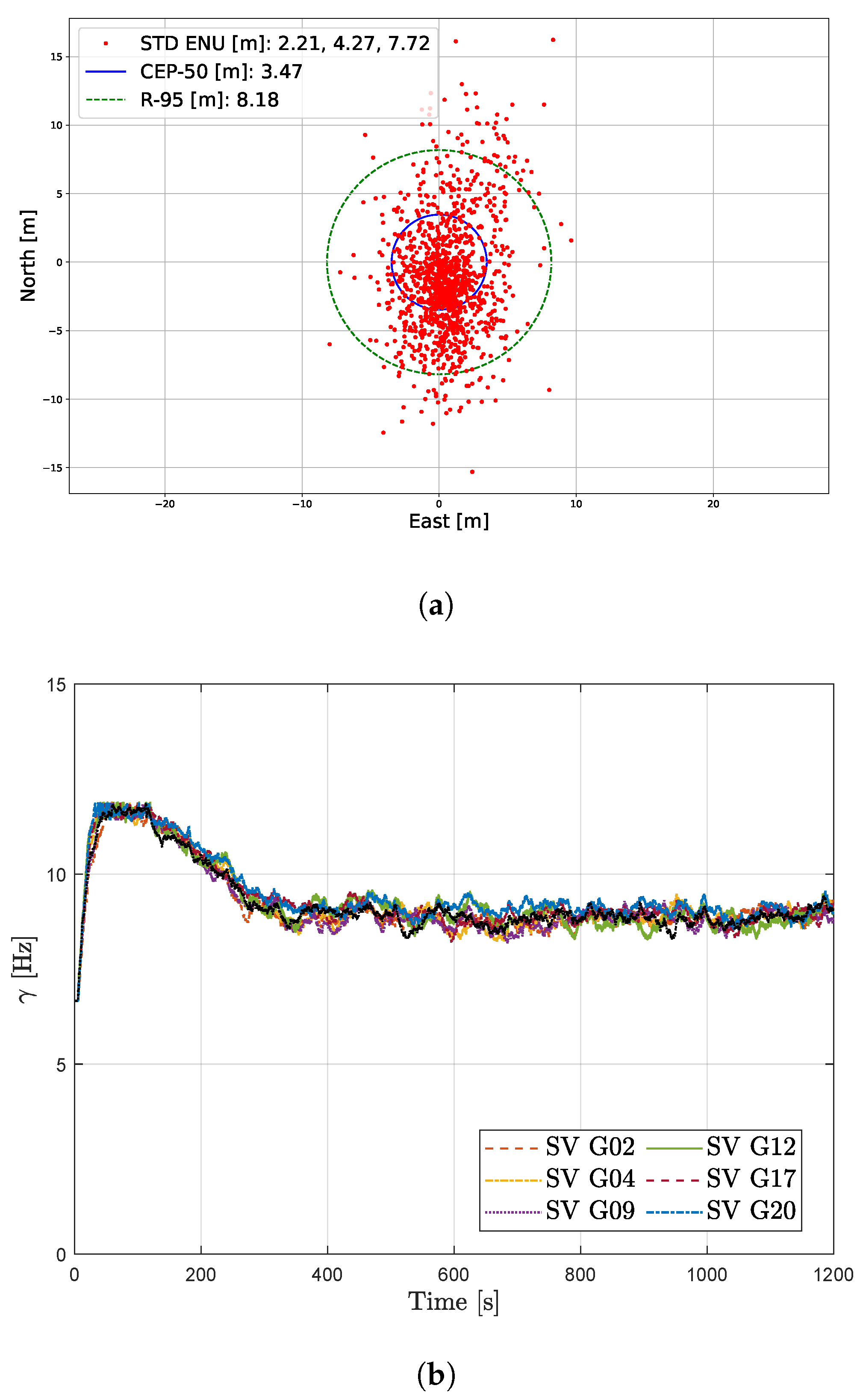
5.1. Static Scenario
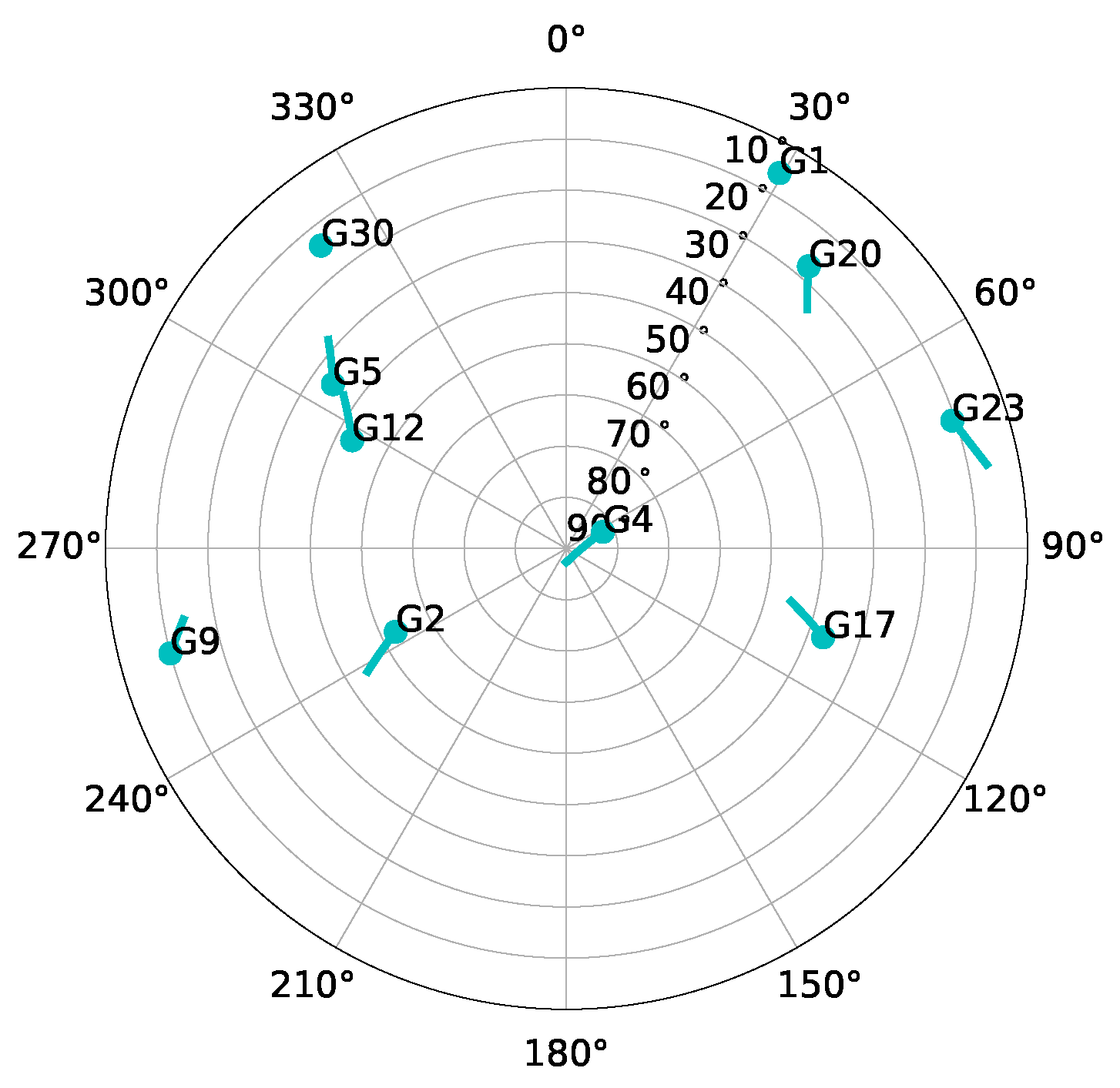
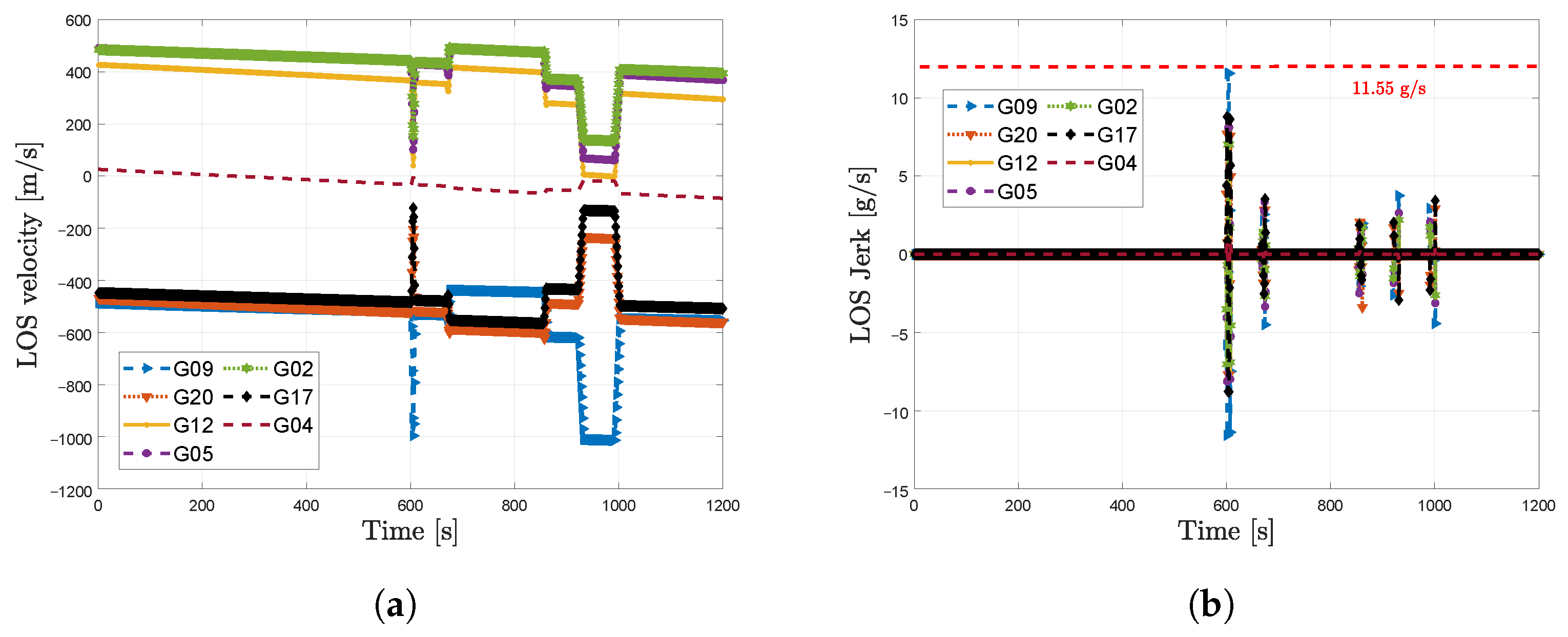
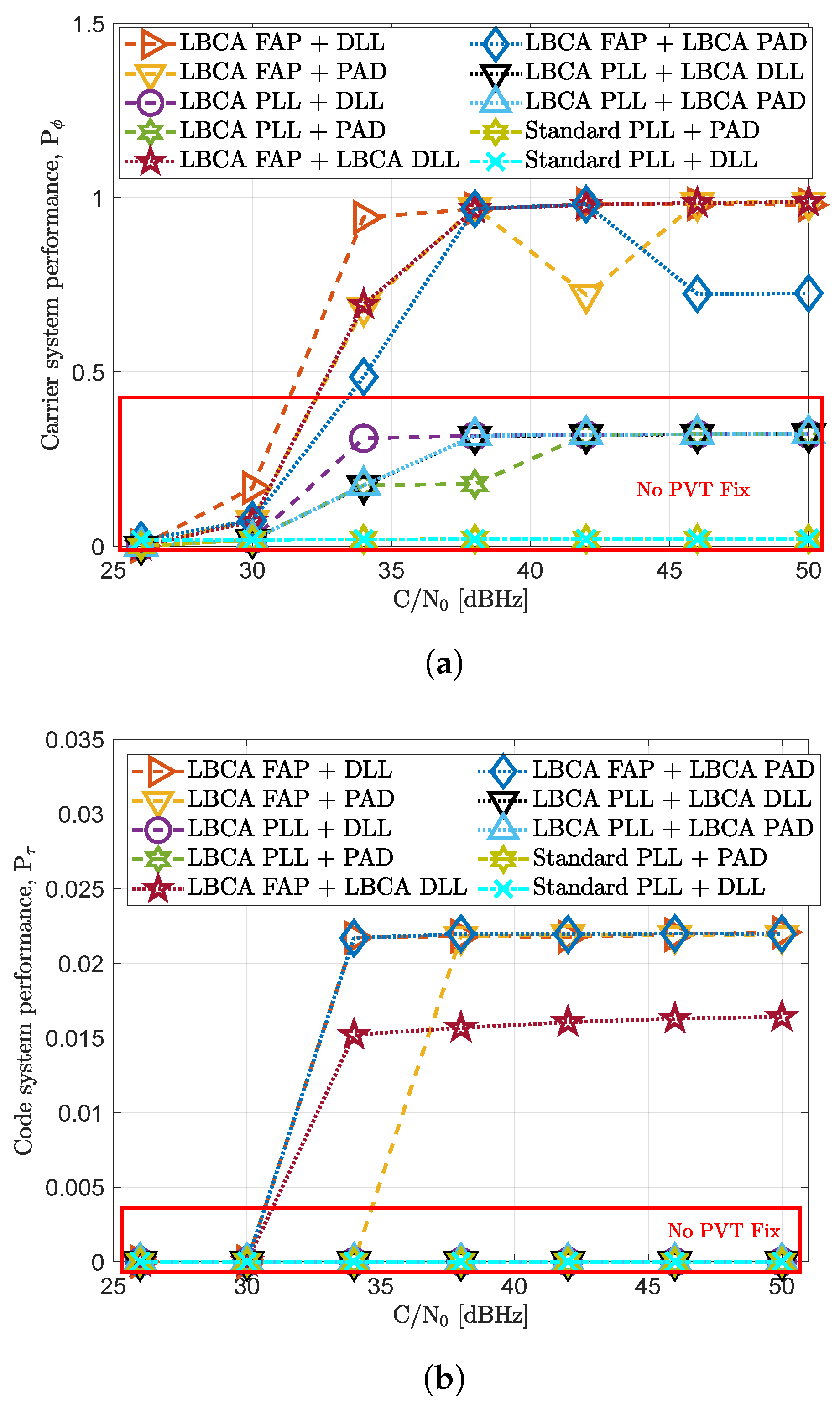
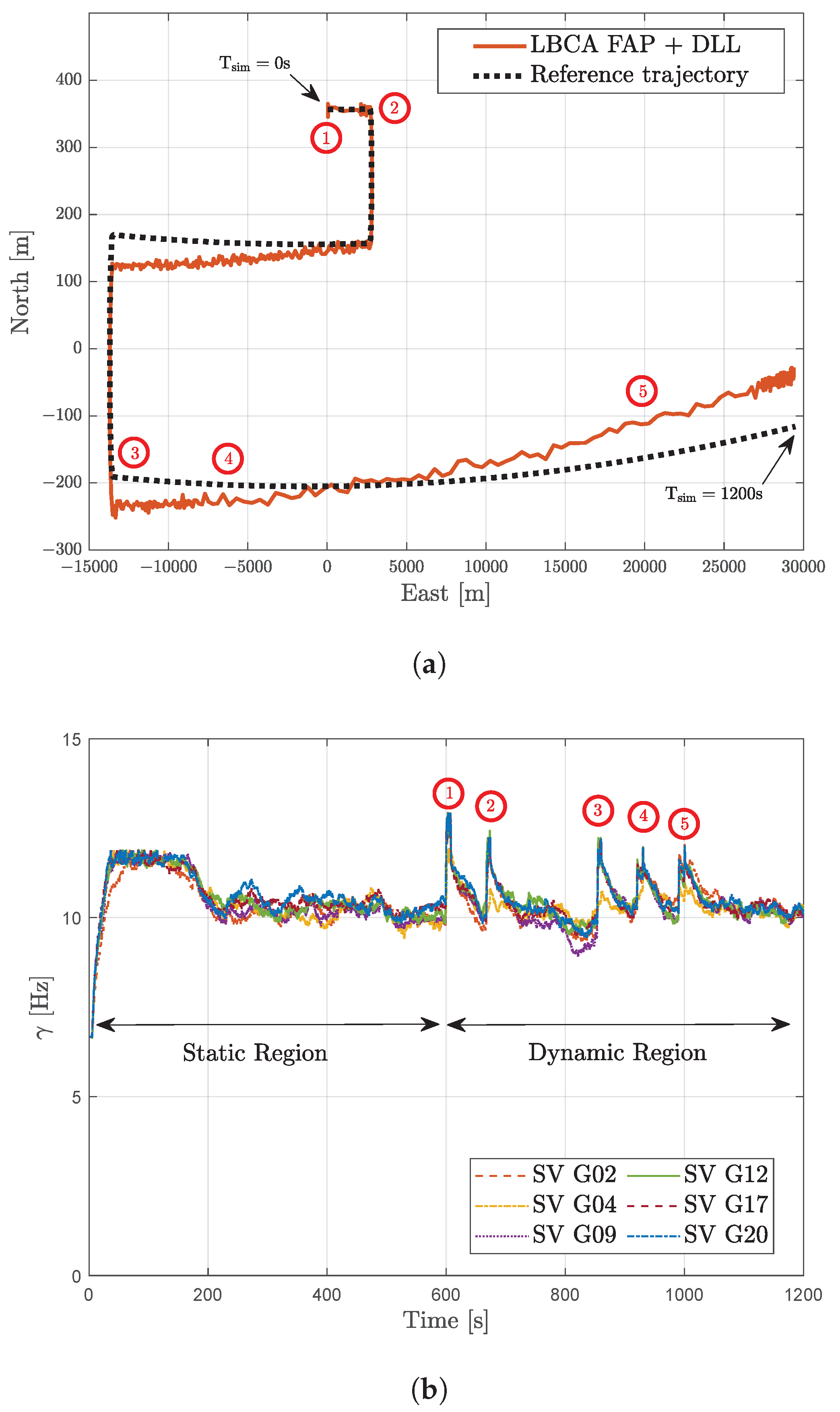
5.2. Dynamic Scenario
5.3. Total System Performance
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | analog-to-digital converter |
| BET | backward Euler transform |
| CARE | continuous domain algebraic Riccati equation |
| carrier-to-noise density ratio | |
| DARE | discrete algebraic Riccati equation |
| DLL | delay locked loop |
| DSKF | direct-state Kalman filter |
| ESKF | error-state Kalman-filter |
| FAP | FLL-assisted-PLL |
| FLL | frequency locked loop |
| FPGA | field-programmable gate array |
| GNSS | global navigation satellite system |
| GPS | Global Positioning System |
| HRMSE | horizontal root mean square error |
| IIR | infinite impulse response |
| IQ | in-phase and quadrature-phase |
| KF | Kalman filter |
| LBCA | loop-bandwidth control algorithm |
| LOS | line-of-sight |
| LUT | lookup table |
| MMSE | minimum mean square error |
| NBCA | normalized-bandwidth control algorithm |
| NCO | numerically controlled oscillator |
| NF | notch filter |
| PAD | PLL-assisted-DLL |
| PCIe | peripheral component interconnect express |
| PLAN | piecewise linear approximation of nonlinearities |
| PLI | phase-lock indicator |
| PLL | phase locked loop |
| PPP | precise point positioning |
| PVT | position, velocity, and time |
| RFCS | radio-frequency constellation simulator |
| RFFE | radio-frequency front-end |
| RTK | real-time kinematic |
| RV | random variable |
| SBC | single board computer |
| SPC | single point correlator |
| SSM | state space model |
| STL | scalar tracking loop |
| SV | satellite vehicle |
| SWAP | size, weight, and power |
| TCP | transmission control protocol |
References
- Kaplan, E.D.; Hegarty, C.J. Understanding GPS: Principles and Applications, 2nd ed.; Artech House Mobile Communications Series; Artech House: Norwood, MA, USA, 2006. [Google Scholar]
- Van Dierendonck, A.J. GPS Receivers. In Global Positioning System: Theory and Applications; American Institute of Aeronautics and Astronautics, AJ Systems: Los Altos, CA, USA, 1996; Volume 1. [Google Scholar]
- Won, J.; Pany, T. Signal Processing. In Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Cham, Switzerland, 2017; pp. 401–442. [Google Scholar]
- Jwo, D.J. Optimisation and sensitivity analysis of GPS receiver tracking loops in dynamic environments. IEE Proc.-Radar Sonar Navig. 2001, 148, 241–250. [Google Scholar] [CrossRef] [Green Version]
- Gardner, F.M. Phaselock Techniques, 3rd ed.; Wiley: New York, NY, USA, 2005. [Google Scholar]
- Dabove, P.; Di Pietra, V. Single-baseline RTK positioning using dual-frequency GNSS receivers inside smartphones. Sensors 2019, 19, 4302. [Google Scholar] [CrossRef] [Green Version]
- Aggrey, J.; Bisnath, S.; Naciri, N.; Shinghal, G.; Yang, S. Multi-GNSS precise point positioning with next-generation smartphone measurements. J. Spat. Sci. 2020, 65, 79–98. [Google Scholar] [CrossRef]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise point positioning using dual-frequency GNSS observations on smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef] [Green Version]
- Zangenehnejad, F.; Gao, Y. GNSS smartphones positioning: Advances, challenges, opportunities, and future perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef]
- Xie, P.; Petovello, M.G. Measuring GNSS multipath distributions in urban canyon environments. IEEE Trans. Instrum. Meas. 2015, 64, 366–377. [Google Scholar]
- Linty, N.; Lo Presti, L.; Dovis, F.; Crosta, P. Performance analysis of duty-cycle power saving techniques in GNSS mass-market receivers. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2014; pp. 1096–1104. [Google Scholar]
- Morales Ferre, R.; Seco-Granados, G.; Lohan, E.S. Energy-efficiency considerations for GNSS signal acquisition. Inside GNSS 2021, 16, 32–39. Available online: https://insidegnss.com/energy-efficiency-considerations-for-gnss-signal-acquisition/ (accessed on 18 March 2023).
- Overbeck, M.; Garzia, F.; Popugaev, A.; Kurz, O.; Forster, F.; Felber, W.; Ayaz, A.S.; Ko, S.; Eissfeller, B. GOOSE-GNSS receiver with an open software interface. In Proceedings of the 28th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015. [Google Scholar]
- Driessen, P.F. DPLL bit synchronizer with rapid acquisition using adaptive Kalman filtering techniques. IEEE Trans. Commun. 1994, 42, 2673–2675. [Google Scholar] [CrossRef]
- Gelb, A. The Analytic Sciences Corporation. In Applied Optimal Estimation; The MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Thacker, N.A.; Lacey, A.J. Tutorial: The Likelihood Interpretation of the Kalman Filter; Tina Memo; University of Manchester: Manchester, UK, 2006. [Google Scholar]
- Vilá-Valls, J.; Closas, P.; Navarro, M.; Fernández-Prades, C. Are PLLs dead? A tutorial on Kalman filter-based techniques for digital carrier synchronization. IEEE Aerosp. Electron. Syst. 2017, 32, 28–45. [Google Scholar] [CrossRef]
- Won, J.H.; Dötterböck, D.; Eissfeller, B. Performance comparison of different forms of Kalman filter approaches for a vector-based GNSS signal tracking loop. Navigation 2010, 57, 185–199. [Google Scholar] [CrossRef]
- Won, J.H.; Pany, T.; Eissfeller, B. Characteristics of Kalman filters for GNSS signal tracking loop. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3671–3681. [Google Scholar] [CrossRef]
- O’Driscoll, C.; Lachapelle, G. Comparison of traditional and Kalman filter based tracking architectures. In Proceedings of the 2009 European Navigation Conference (ENC), Warsaw, Poland, 3–6 May 2009. [Google Scholar]
- O’Driscoll, C.; Petovello, M.; Lachapelle, G. Choosing the coherent integration time for Kalman filter based carrier phase tracking of GNSS signals. GPS Solut. 2011, 15, 345–356. [Google Scholar] [CrossRef]
- Tang, X.; Falco, G.; Falletti, E.; Lo Presti, L. Theoretical analysis and tuning criteria of the Kalman filter-based tracking loop. GPS Solut. 2014, 19, 489–503. [Google Scholar] [CrossRef]
- Tang, X.; Falco, G.; Falletti, E.; Lo Presti, L. Complexity reduction of the Kalman filter-based tracking loops in GNSS receivers. GPS Solut. 2017, 21, 685–699. [Google Scholar] [CrossRef]
- Cortés, I.; Marín, P.; van der Merwe, J.R.; Simona Lohan, E.; Nurmi, J.; Felber, W. Adaptive techniques in scalar tracking loops with direct-state kalman-filter. In Proceedings of the 2021 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 1–3 June 2021; pp. 1–7. [Google Scholar]
- Cortés, I.; van der Merwe, J.R.; Lohan, E.S.; Nurmi, J.; Felber, W. Performance evaluation of adaptive tracking techniques with direct-State Kalman filter. Sensors 2022, 22, 420. [Google Scholar] [CrossRef] [PubMed]
- Cortés, I.; Conde, N.; van der Merwe, J.R.; Lohan, E.S.; Nurmi, J.; Felber, W. Low-complexity adaptive direct-state Kalman filter for robust GNSS carrier tracking. In Proceedings of the 2022 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 7–9 June 2022; pp. 1–7. [Google Scholar]
- Won, J.W.; Eissfiller, B. A tuning method based on signal-to-noise power ratio for adaptive PLL and its relationship with equivalent noise bandwidth. IEEE Commun. Lett. 2013, 17, 393–396. [Google Scholar] [CrossRef]
- Won, J.H. A novel adaptive digital phase-lock-loop for modern digital GNSS receivers. IEEE Commun. Lett. 2014, 18, 46–49. [Google Scholar] [CrossRef]
- Vilà-Valls, J.; Closas, P.; Fernández-Prades, C. On the identifiability of noise statistics and adaptive KF design for robust GNSS carrier tracking. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–10. [Google Scholar]
- López-Salcedo, J.A.; Peral-Rosado, J.A.D.; Seco-Granados, G. Survey on robust carrier tracking techniques. IEEE Commun. Surv. Tutor. 2014, 12, 670–688. [Google Scholar] [CrossRef]
- Cortés, I.; van der Merwe, J.R.; Nurmi, J.; Rügamer, A.; Felber, W. Evaluation of adaptive loop-bandwidth tracking techniques in GNSS receivers. Sensors 2021, 21, 502. [Google Scholar] [CrossRef]
- Duník, J.; Straka, O.; Kost, O.; Havlík, J. Noise covariance matrices in state-space models: A survey and comparison of estimation methods—Part I. Int. J. Adapt. Control Signal Process. 2017, 31, 1505–1543. [Google Scholar] [CrossRef]
- Bolla, P. Advanced Tracking Loop Architectures for Multi-Frequency GNSS Receiver. Ph.D. Thesis, Tampere University of Technology, Tampere, Finland; Samara University, Samara, Russia, 2018. Available online: http://urn.fi/URN:ISBN:978-952-15-4309-8 (accessed on 18 March 2023).
- Cortes, I.; Van der Merwe, J.R.; Rügamer, A.; Felber, W. Adaptive loop-bandwidth control algorithm for scalar tracking loops. In Proceedings of the 2020 Proceedings of IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1178–1188. [Google Scholar]
- Hurd, W.; Statman, J.; Vilnrotter, V. High dynamic GPS receiver using maximum likelihood estimation and frequency tracking. IEEE Trans. Aerosp. Electron. Syst. 1987, AES-23, 425–437. [Google Scholar] [CrossRef]
- Cortés, I.; Urquijo, S.; Overbeck, M.; Felber, W.; Agrotis, L.; Mayer, V.; Schönemann, E.; Enderle, W. Robust tracking strategy for modern GNSS receivers in sounding rockets. In Proceedings of the ESA Workshop on Satellite Navigation User Equipment Technologies (NAVITEC), Noordwijk, The Netherlands, 5–7 April 2022; pp. 1–7. [Google Scholar]
- Cortés, I.; Iñiguez de Gordoa, J.A.; van der Merwe, J.R.; Rügamer, A.; Felber, W. Performance and complexity comparison of adaptive loop-bandwidth tracking techniques. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–7. [Google Scholar]
- Van der Merwe, J.R.; Cortés, I.; Garzia, F.; Lohan, E.S.; Nurmi, J.; Felber, W. Resilient interference mitigation with adaptive frequency locked loop based adaptive notch filtering. In Proceedings of the 2021 Navigation, Edinburgh, UK, 15–18 November 2021; pp. 1–18. [Google Scholar]
- Van der Merwe, J.R.; Cortés, I.; Garzia, F.; Rügamer, A.; Felber, W. Exotic FMCW waveform mitigation with an advanced multi-parameter adaptive notch filter (MPANF). In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 3783–3819. [Google Scholar]
- Conde, N.; Cortés, I.; van der Merwe, J.R.; Rügamer, A.; Felber, W. Analysis of multipath effect in the tracking stage using loop bandwidth control algorithm. In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 1236–1256. [Google Scholar]
- Song, Y.J.; Won, J.H. Table-Based adaptive digital phase-locked loop for GNSS receivers operating in moon exploration missions. Sensors 2022, 22, 10001. [Google Scholar] [CrossRef] [PubMed]
- Lasota, A.; Michael, C.M. Chaos, Fractals, and Noise: Stochastic Aspects of Dynamics, 2nd ed.; Applied Mathematical Sciences; Springer: New York, NY, USA, 1994. [Google Scholar]
- Bucy, R.S.; Joseph, P.D. Filtering for Stochastic Processes with Applications to Guidance; Interscience Publishers: New York, NY, USA, 1968. [Google Scholar]
- Einicke, G. Smoothing, Filtering and Prediction: Estimating the Past, Present and Future; InTechOpen: London, UK, 2012. [Google Scholar]
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering: With MATLAB Exercises and Solutions, 3rd ed.; Wiley: New York, NY, 1997. [Google Scholar]
- Aguirre, S.; Hurd, W.; Kumar, R.; Statman, J. A comparison of methods for DPLL loop filter design. In Telecommunications and Data Acquisition Progress Report 42-79; Jet Propulsion Laboratory: Pasadena, CA, USA, 1986. [Google Scholar]
- Jury, E.I. Theory and Application of the Z-Transform Method; Wiley: New York, NY, USA, 1964. [Google Scholar]
- Laub, A. A Schur method for solving algebraic Riccati equations. IEEE Trans. Automat. Contr. 1979, 24, 913–921. [Google Scholar] [CrossRef] [Green Version]
- van der Merwe, J.R.; Cortés, I.; Garzia, F.; Rügamer, A.; Felber, W. Multi-parameter adaptive notch filter (MPANF) for enhanced interference mitigation. J. Navig. 2023, 70, 2. [Google Scholar] [CrossRef]
- Domingos, P. The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our World; Basic Books, Inc.: New York, NY, USA, 2018. [Google Scholar]
- Amin, H.; Curtis, K.; Hayes-Gill, B. Piecewise linear approximation applied to nonlinear function of a neural network. IEE Proc. Circuits Devices Syst. 1997, 144, 313–317. [Google Scholar] [CrossRef]
- Seybold, J. GOOSE: Open GNSS Receiver Platform; Technical Report; TeleOrbit GmbH: Nuremberg, Germany, 2020; Available online: https://teleorbit.eu/en/satnav/ (accessed on 18 March 2023).
- Welcome to the Open Gnss RecEiver (OGRE) Wiki! Available online: https://github.com/Fraunhofer-IIS/ogre/wiki/ (accessed on 18 March 2023).
- Robust Tracking Techniques Dataset using GOOSE Receiver. Available online: https://owncloud.fraunhofer.de/index.php/s/LGoWPVtV5xbQ9mB (accessed on 18 March 2023).
- Yang, R.; Xu, D.; Morton, Y.T. Generalized multifrequency GPS carrier tracking architecture: Design and performance analysis. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2548–2563. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration Parameter | FLL | PLL | DLL |
|---|---|---|---|
| Discriminator type | Atan2(·) | Atan(·) | Dot product |
| Initial bandwidth [Hz] | 0 | 8 | 1 |
| Chip spacing, [chips] | 0.5 | ||
| Integration time, [ms] | 20 | ||
| GNSS signal | GPS L1 C/A |
| Tracking Scheme | Tracking Configuration: | |||
|---|---|---|---|---|
| FAP | PAD | |||
| x | x | |||
| x | x | x | ||
| x | x | |||
| x | x | |||
| x | x | x | ||
| x | x | x | x | |
| x | x | x | ||
| x | x | x | ||
| x | ||||
| Tracking Configuration | Added Number of Operations: | ||
|---|---|---|---|
| Additions | Multiplications | Divisions | |
| [31] | 6 | 8 | 2 |
| [31] | 6 | 7 | 1 |
| FAP | 3 | 3 | 0 |
| PAD | 1 | 0 | 0 |
| Tracking | Static | Dynamic | Added Time |
|---|---|---|---|
| Technique | Complexity | ||
| 0.0386 | 0.0022 | 1.94 | |
| 0.0349 | 0.0016 | 1.94 | |
| 0.0375 | 0 | 1.90 | |
| 0.0377 | 0 | 1.90 | |
| 0.0160 | 0.0015 | 2.84 | |
| 0.0329 | 0.0017 | 2.84 | |
| 0.0153 | 0 | 2.81 | |
| 0.0348 | 0 | 2.81 | |
| 0.0368 | 0 | 1.00 | |
| 0.0369 | 0 | 1.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cortés, I.; van der Merwe, J.R.; Lohan, E.S.; Nurmi, J.; Felber, W. Evaluation of Low-Complexity Adaptive Full Direct-State Kalman Filter for Robust GNSS Tracking. Sensors 2023, 23, 3658. https://doi.org/10.3390/s23073658
Cortés I, van der Merwe JR, Lohan ES, Nurmi J, Felber W. Evaluation of Low-Complexity Adaptive Full Direct-State Kalman Filter for Robust GNSS Tracking. Sensors. 2023; 23(7):3658. https://doi.org/10.3390/s23073658
Chicago/Turabian StyleCortés, Iñigo, Johannes Rossouw van der Merwe, Elena Simona Lohan, Jari Nurmi, and Wolfgang Felber. 2023. "Evaluation of Low-Complexity Adaptive Full Direct-State Kalman Filter for Robust GNSS Tracking" Sensors 23, no. 7: 3658. https://doi.org/10.3390/s23073658