
Feasibility Study on the Classification of Persimmon Trees’ Components Based on Hyperspectral LiDAR

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
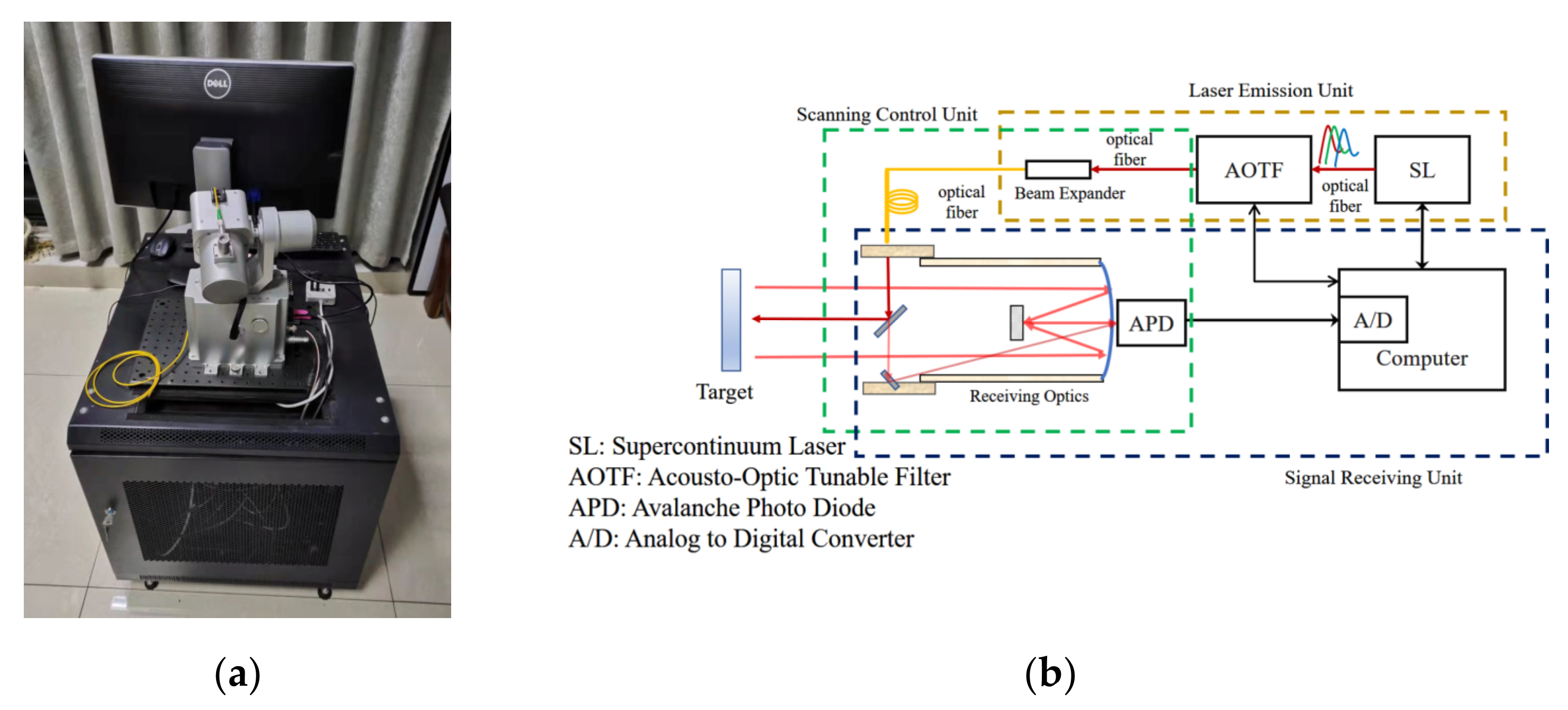
2.1. Hyperspectral LiDAR System
2.2. Experimental Samples
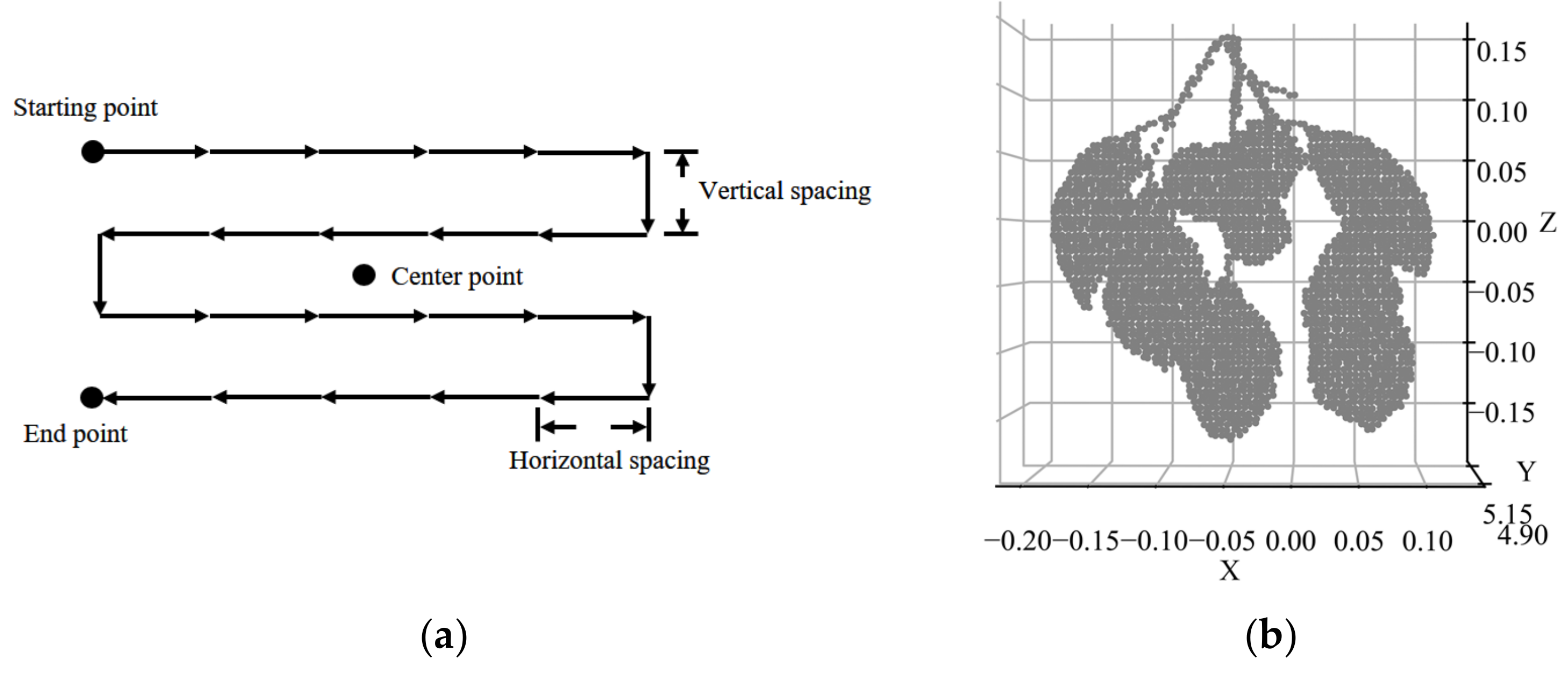
2.3. Data Acquisition and Processing
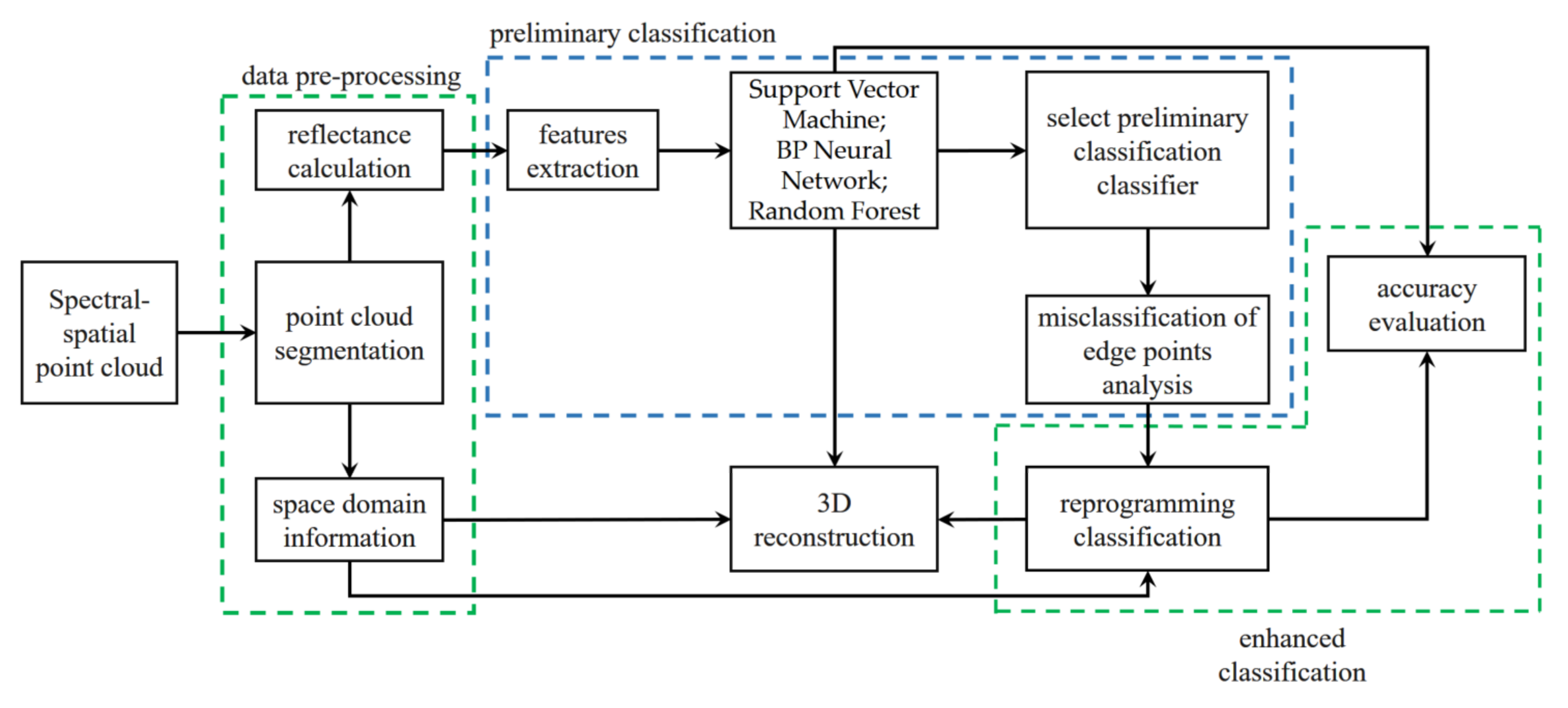
3. Methods
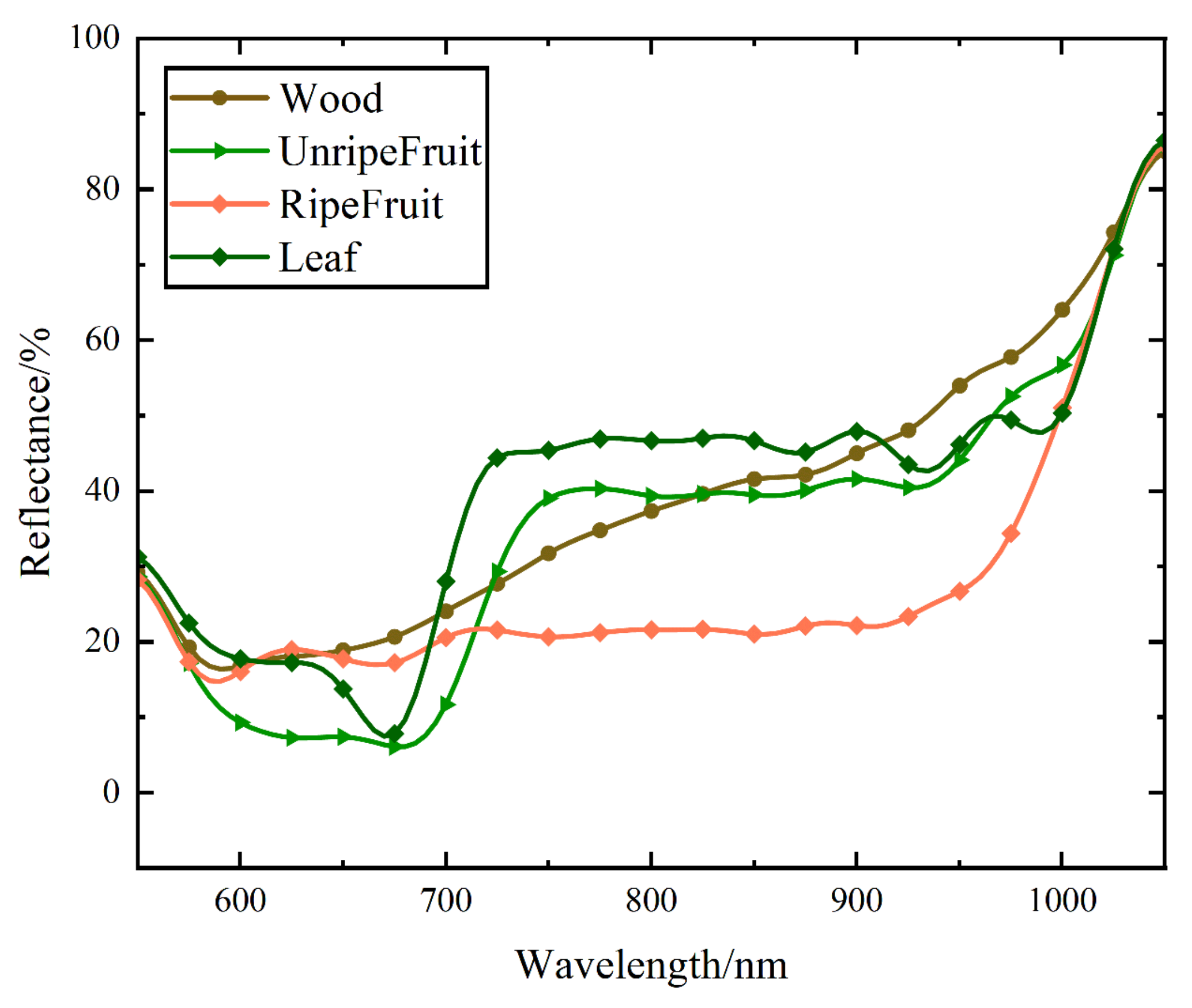
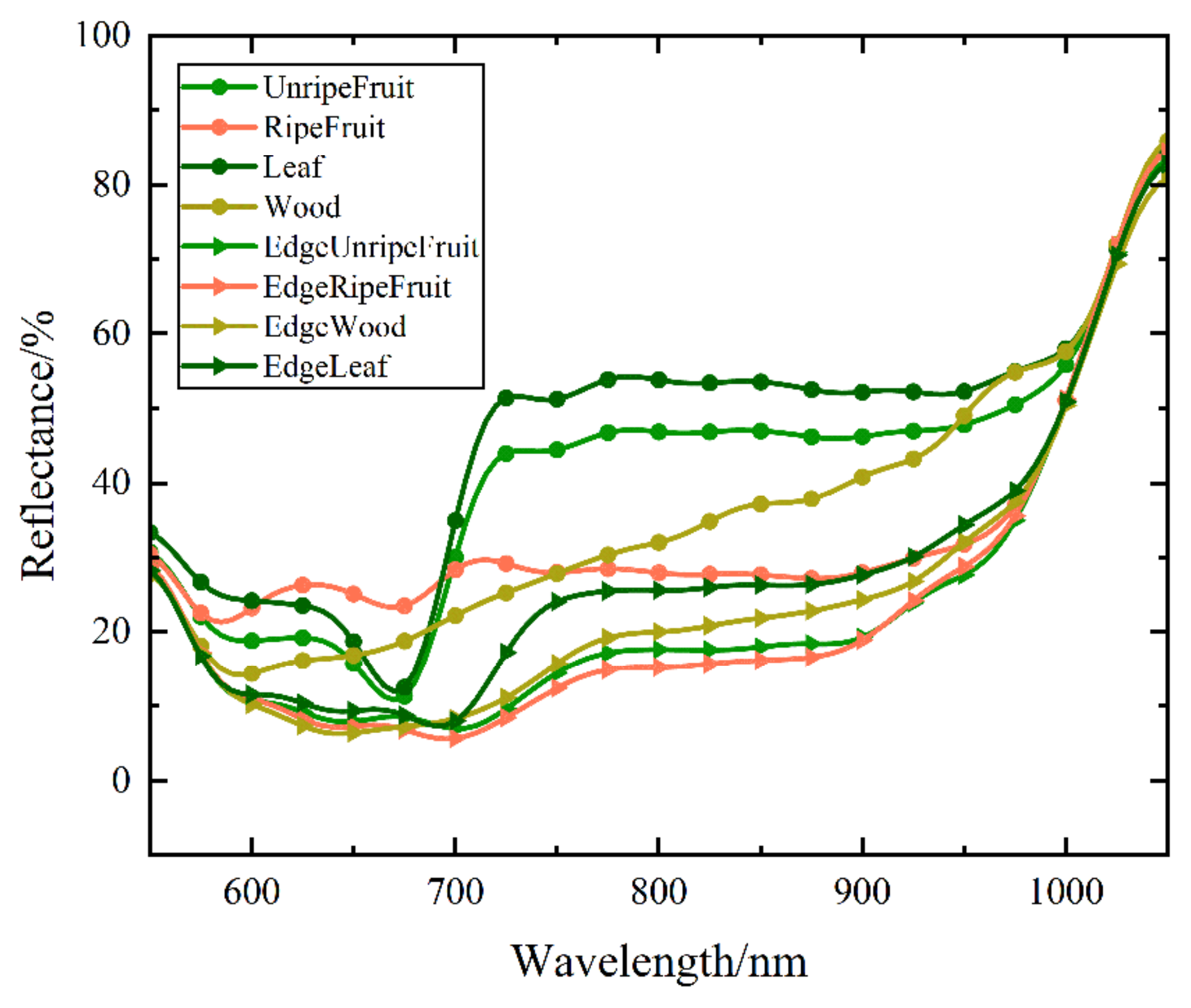
3.1. Feature Parameter Extraction
3.2. Preliminary Classification
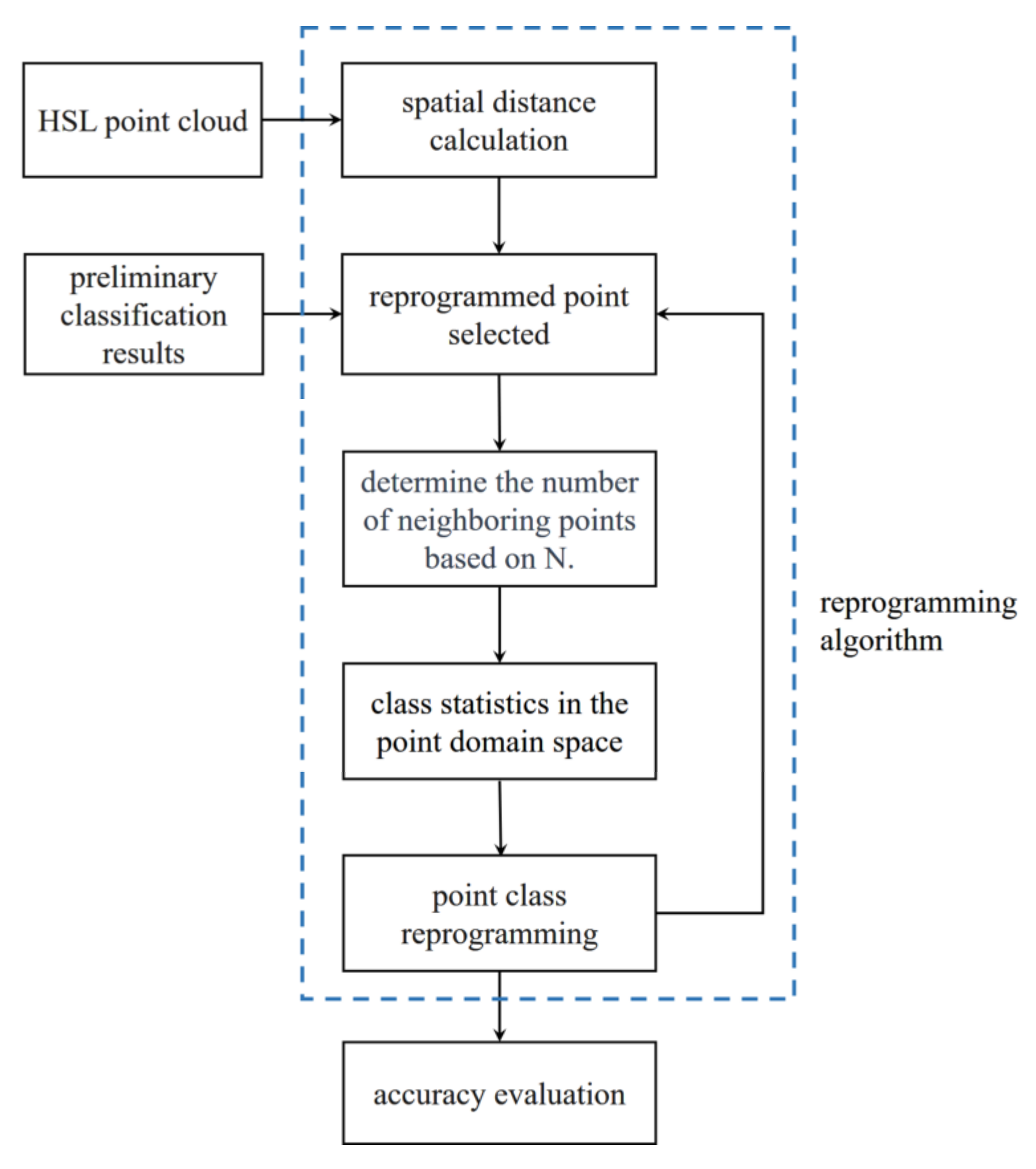
3.3. Enhanced Classification
3.4. Three-Dimensional Reconstruction
3.5. Accuracy Evaluation
4. Results and Discussion
4.1. Preliminary Classification Performance
4.2. Enhanced Classification Performance
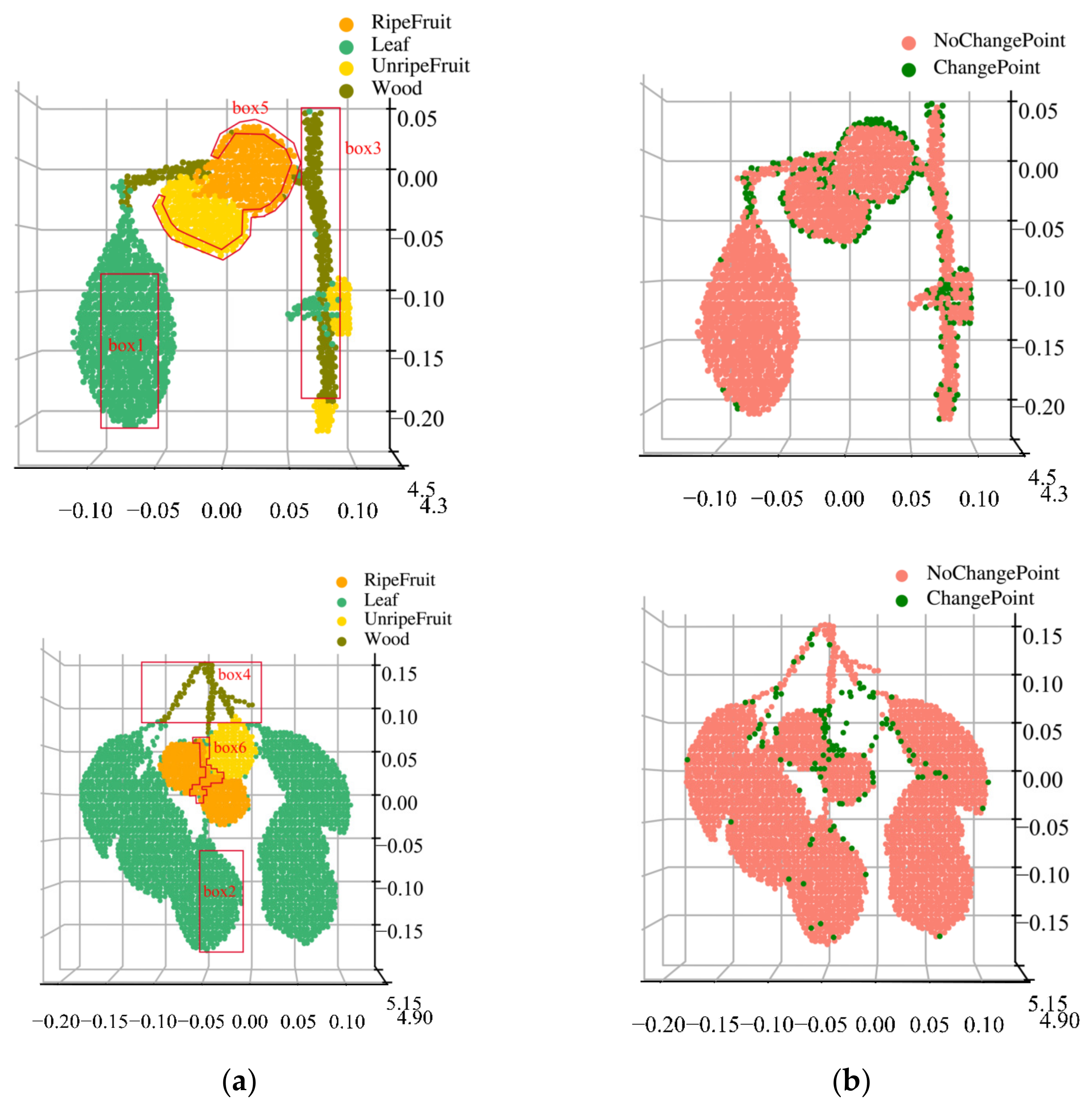
4.2.1. Neighboring Point Decision
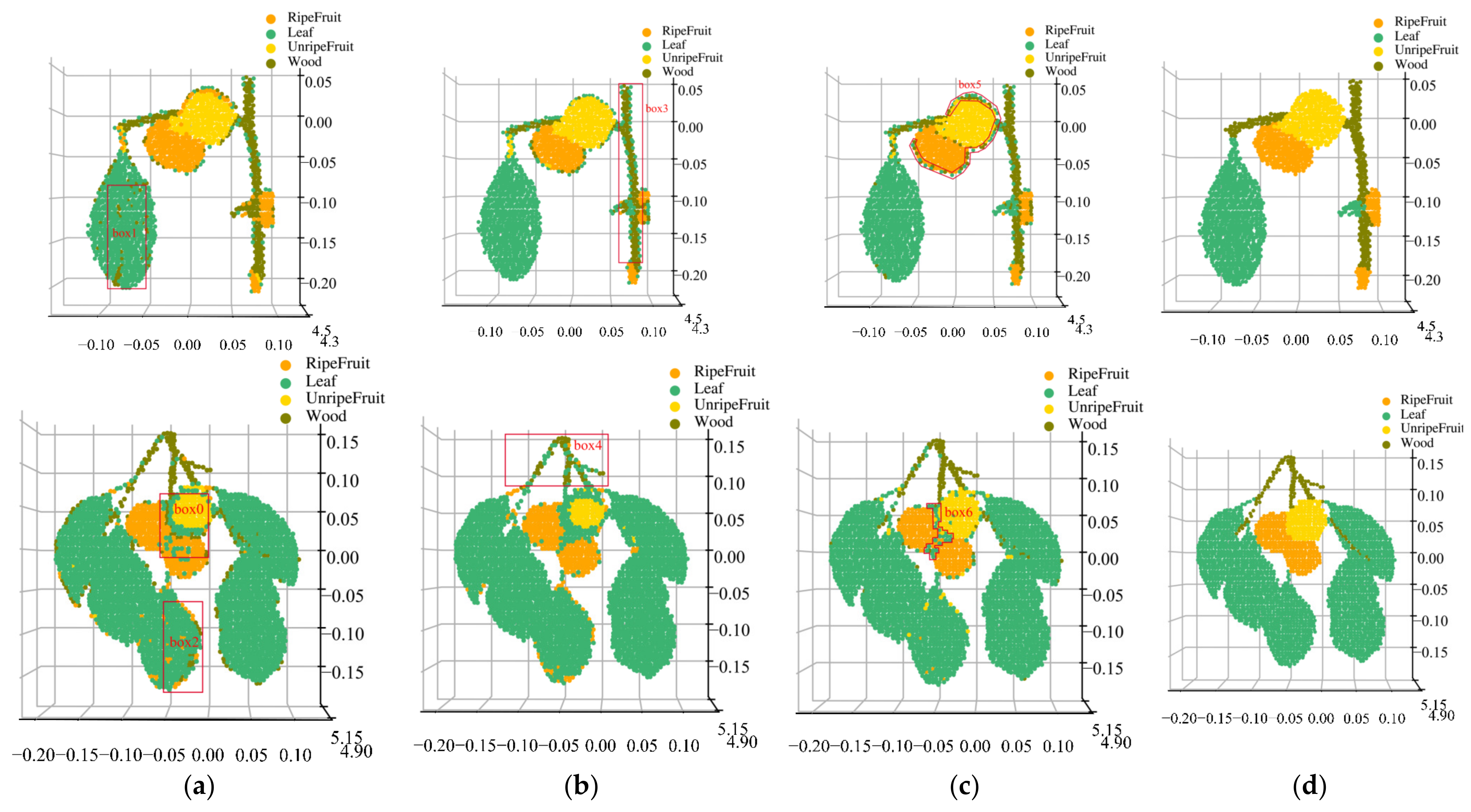
4.2.2. Classification Performance
4.3. Reconstruction of the Classification Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. Deepfruits: A fruit detection system using deep neural networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Junos, M.H.; Mohd Khairuddin, A.S.; Thannirmalai, S.; Dahari, M. Automatic detection of oil palm fruits from UAV images using an improved YOLO model. Vis. Comput. 2022, 38, 2341–2355. [Google Scholar] [CrossRef]
- Jia, W.; Liu, M.; Luo, R.; Wang, C.; Pan, N.; Yang, X.; Ge, X. YOLOF-Snake: An Efficient Segmentation Model for Green Object Fruit. Front. Plant Sci. 2022, 13, 765523. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Gu, Q.; Zhao, Y.; Wan, H.; Wang, R.; Zhang, X.; Cheng, Y. Quantitative Extraction and Evaluation of Tomato Fruit Phenotypes Based on Image Recognition. Improv. Qual. Saf. Trait. Hortic. Plants 2022, 13, 859290. [Google Scholar] [CrossRef] [PubMed]
- Lu, Z.; Qi, L.; Zhang, H.; Wan, J.; Zhou, J. Image Segmentation of UAV Fruit Tree Canopy in a Natural Illumination Environment. Agriculture 2022, 12, 1039. [Google Scholar] [CrossRef]
- Varga, L.A.; Makowski, J.; Zell, A. Measuring the Ripeness of Fruit with Hyperspectral Imaging and Deep Learning. In Proceedings of the 2021 International Joint Conference on Neural Networks (IJCNN), Shenzhen, China, 18–22 July 2021; pp. 1–8. [Google Scholar]
- Fu, X.; Wang, M. Detection of Early Bruises on Pears Using Fluorescence Hyperspectral Imaging Technique. Food Anal. Methods 2022, 15, 115–123. [Google Scholar] [CrossRef]
- Munera, S.; Rodríguez-Ortega, A.; Aleixos, N.; Cubero, S.; Gómez-Sanchis, J.; Blasco, J. Detection of Invisible Damages in ‘Rojo Brillante’ Persimmon Fruit at Different Stages Using Hyperspectral Imaging and Chemometrics. Foods 2021, 10, 2170. [Google Scholar] [CrossRef]
- Steinbrener, J.; Posch, K.; Leitner, R. Hyperspectral fruit and vegetable classification using convolutional neural networks. Comput. Electron. Agric. 2019, 162, 364–372. [Google Scholar] [CrossRef]
- Kang, Z.; Geng, J.; Fan, R.; Hu, Y.; Sun, J.; Wu, Y.; Liu, C. Nondestructive Testing Model of Mango Dry Matter Based on Fluorescence Hyperspectral Imaging Technology. Agriculture 2022, 12, 1337. [Google Scholar] [CrossRef]
- Raj, R.; Cosgun, A.; Kulić, D. Strawberry Water Content Estimation and Ripeness Classification Using Hyperspectral Sensing. Agronomy 2022, 12, 425. [Google Scholar] [CrossRef]
- Perez-Sanz, F.; Navarro, P.J.; Egea-Cortines, M. Plant phenomics: An overview of image acquisition technologies and image data analysis algorithms. GigaScience 2017, 6, gix092. [Google Scholar] [CrossRef] [Green Version]
- Abbasi, R.; Bashir, A.K.; Alyamani, H.J.; Amin, F.; Doh, J.; Chen, J. Lidar point cloud compression, processing and learning for autonomous driving. IEEE Trans. Intell. Transp. Syst. 2022, 24, 962–979. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef] [Green Version]
- Liao, K.; Li, Y.; Zou, B.; Li, D.; Lu, D. Examining the Role of UAV Lidar Data in Improving Tree Volume Calculation Accuracy. Remote Sens. 2022, 14, 4410. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, G.; Jiang, Y.; Xu, B.; Li, X.; Zhu, Y.; Yang, H. Apple tree branch information extraction from terrestrial laser scanning and backpack-lidar. Remote Sens. 2020, 12, 3592. [Google Scholar] [CrossRef]
- Gené-Mola, J.; Gregorio, E.; Guevara, J.; Auat, F.; Sanz-Cortiella, R.; Escolà, A.; Rosell-Polo, J.R. Fruit detection in an apple orchard using a mobile terrestrial laser scanner. Biosyst. Eng. 2019, 187, 171–184. [Google Scholar] [CrossRef]
- Omasa, K.; Hosoi, F.; Uenishi, T.M.; Shimizu, Y.; Akiyama, Y. Three-dimensional modeling of an urban park and trees by combined airborne and portable on-ground scanning LIDAR remote sensing. Environ. Modeling Assess. 2008, 13, 473–481. [Google Scholar] [CrossRef]
- Kim, S.; McGaughey, R.J.; Andersen, H.E.; Schreuder, G. Tree species differentiation using intensity data derived from leaf-on and leaf-off airborne laser scanner data. Remote Sens. Environ. 2009, 113, 1575–1586. [Google Scholar] [CrossRef]
- Korpela, I.; Ørka, H.O.; Maltamo, M.; Tokola, T.; Hyyppä, J. Tree species classification using airborne LiDAR–effects of stand and tree parameters, downsizing of training set, intensity normalization, and sensor type. Silva Fenn. 2010, 44, 319–339. [Google Scholar] [CrossRef] [Green Version]
- Mark Danson, F.; Sasse, F.; Schofield, L.A. Spectral and spatial information from a novel dual-wavelength full-waveform terrestrial laser scanner for forest ecology. Interface Focus 2018, 8, 20170049. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Chen, Y. Environment Awareness with Hyperspectral LiDAR Technologies. Ph.D. Thesis, Aalto University, Helsinki, Finland, 2020. [Google Scholar]
- Nevalainen, O.; Hakala, T.; Suomalainen, J.; Kaasalainen, S. Nitrogen concentration estimation with hyperspectral LiDAR. ISPRS Annals of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2013, 2, 205–210. [Google Scholar]
- Bi, K.; Xiao, S.; Gao, S.; Zhang, C.; Huang, N.; Niu, Z. Estimating vertical chlorophyll concentrations in maize in different health states using hyperspectral LiDAR. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8125–8133. [Google Scholar] [CrossRef]
- Hakala, T.; Suomalainen, J.; Kaasalainen, S.; Chen, Y. Full waveform hyperspectral LiDAR for terrestrial laser scanning. Opt. Express 2012, 20, 7119–7127. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Hakala, T.; Suomalainen, J.; Kaasalainen, S.; Nevalainen, O.; Vastaranta, M.; Hyyppä, J. Classification of spruce and pine trees using active hyperspectral LiDAR. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1138–1141. [Google Scholar] [CrossRef]
- Shao, H.; Cao, Z.; Li, W.; Chen, Y.; Jiang, C.; Hyyppä, J.; Sun, L. Feasibility Study of Wood-Leaf Separation Based on Hyperspectral LiDAR Technology in Indoor Circumstances. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 15, 729–738. [Google Scholar] [CrossRef]
- Wei, X.; Liu, F.; Qiu, Z.; Shao, Y.; He, Y. Ripeness classification of astringent persimmon using hyperspectral imaging technique. Food Bioprocess Technol. 2014, 7, 1371–1380. [Google Scholar] [CrossRef]
- Clevers, J.G.; De Jong, S.M.; Epema, G.F.; Van Der Meer, F.; Bakker, W.H.; Skidmore, A.K.; Addink, E.A. MERIS and the red-edge position. Int. J. Appl. Earth Obs. Geoinf. 2001, 3, 313–320. [Google Scholar] [CrossRef]
- Wold, S.; Esbensen, K.; Geladi, P. Principal component analysis. Chemom. Intell. Lab. Syst. 1987, 2, 37–52. [Google Scholar] [CrossRef]
- Barnes, E.M.; Clarke, T.R.; Richards, S.E.; Colaizzi, P.D.; Haberland, J.; Kostrzewski, M.; Moran, M.S. Coincident detection of crop water stress, nitrogen status and canopy density using ground based multispectral data. In Proceedings of the Fifth International Conference on Precision Agriculture, Bloomington, MN, USA, 16–10 July 2000; Volume 1619, p. 6. [Google Scholar]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for nondestructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M.N. Spectral reflectance changes associated with autumn senescence of Aesculus hippocastanum L. and Acer platanoides L. leaves. Spectral features and relation to chlorophyll estimation. J. Plant Physiol. 1994, 143, 286–292. [Google Scholar] [CrossRef]
- Chen, B.; Shi, S.; Gong, W.; Sun, J.; Chen, B.; Du, L.; Zhao, X. True-color three-dimensional imaging and target classification based on hyperspectral LiDAR. Remote Sens. 2019, 11, 1541. [Google Scholar] [CrossRef] [Green Version]
- Pham, Q.T.; Liou, N.S. The development of on-line surface defect detection system for jujubes based on hyperspectral images. Comput. Electron. Agric. 2022, 194, 106743. [Google Scholar] [CrossRef]
- Shen, X.; Cao, L. Tree-species classification in subtropical forests using airborne hyperspectral and LiDAR data. Remote Sens. 2017, 9, 1180. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Bagging prediction. Mach. Learn. 1996, 14, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Colgan, M.S.; Baldeck, C.A.; Féret, J.B.; Asner, G.P. Mapping savanna tree species at ecosystem scales using support vector machine classification and BRDF correction on airborne hyperspectral and LiDAR data. Remote Sens. 2012, 4, 3462–3480. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Liao, X.; Zheng, P.; Xue, S.; Peng, R. Classification of Chinese herbal medicine by laser-induced breakdown spectroscopy with principal component analysis and artificial neural network. Anal. Lett. 2018, 51, 575–586. [Google Scholar] [CrossRef]
- Chen, B.; Shi, S.; Gong, W.; Zhang, Q.; Yang, J.; Du, L.; Song, S. Multispectral LiDAR point cloud classification: A two-step approach. Remote Sens. 2017, 9, 373. [Google Scholar] [CrossRef] [Green Version]
- Song, S.; Wang, B.; Gong, W.; Chen, Z.; Lin, X.; Sun, J.; Shi, S. A new waveform decomposition method for multispectral LiDAR. ISPRS J. Photogramm. Remote Sens. 2019, 149, 40–49. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Parameters | Description |
|---|---|
| R700 | Reflectance in the 700 nm band |
| R730 | Reflectance in the 730 nm band |
| R780 | Reflectance in the 780 nm band |
| R850 | Reflectance in the 850 nm band |
| R900 | Reflectance in the 900 nm band |
| AVG R760–R930 | Average reflectance in the wavelength range from 760 nm to 930 nm |
| CI red edge | (R780/R710) – 1 |
| NDVI | (R800 – R670)/(R800 + R670) |
| NDRE | (R790 – R720)/(R790 + R720) |
| Method | Accuracy (%) | ||||
|---|---|---|---|---|---|
| Leaf | Ripe Fruit | Unripe Fruit | Wood | Overall | |
| SVM | 87.3 | 85.8 | 79.7 | 81.2 | 84.6 |
| BPNN | 96.7 | 80 | 86.2 | 67.8 | 86.3 |
| RF | 97.1 | 85.8 | 81.7 | 76.9 | 88.6 |
| N/Number | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| Overall accuracy (%) | 95.4 | 95.8 | 96.4 | 96.6 | 96.5 | 96.3 | 96.2 |
| Method | Accuracy (%) | ||||
|---|---|---|---|---|---|
| Leaf | Ripe Fruit | Unripe Fruit | Wood | Overall | |
| Preliminary Classification | 97.1 | 85.8 | 81.7 | 76.9 | 88.6 |
| Enhanced Classification | 99.4 | 98.2 | 94.6 | 89.1 | 96.6 |
| Methods | Accuracy (%) | |||||
|---|---|---|---|---|---|---|
| Leaf | Ripe Fruit | Unripe Fruit | Wood | Overall | ||
| Preliminary Classification | SVM | 87.2 | 64.5 | 56.1 | 69.9 | 80.1 |
| BPNN | 86.5 | 78.5 | 88.4 | 78.8 | 84.9 | |
| RF | 89.3 | 83.3 | 82.3 | 75.5 | 88.3 | |
| Enhanced Classification | 94.7 | 92.3 | 86 | 92.9 | 93.4 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, H.; Wang, F.; Li, W.; Hu, P.; Sun, L.; Xu, C.; Jiang, C.; Chen, Y. Feasibility Study on the Classification of Persimmon Trees’ Components Based on Hyperspectral LiDAR. Sensors 2023, 23, 3286. https://doi.org/10.3390/s23063286
Shao H, Wang F, Li W, Hu P, Sun L, Xu C, Jiang C, Chen Y. Feasibility Study on the Classification of Persimmon Trees’ Components Based on Hyperspectral LiDAR. Sensors. 2023; 23(6):3286. https://doi.org/10.3390/s23063286
Chicago/Turabian StyleShao, Hui, Fuyu Wang, Wei Li, Peilun Hu, Long Sun, Chong Xu, Changhui Jiang, and Yuwei Chen. 2023. "Feasibility Study on the Classification of Persimmon Trees’ Components Based on Hyperspectral LiDAR" Sensors 23, no. 6: 3286. https://doi.org/10.3390/s23063286