

Linear Interval Approximation of Sensor Characteristics with Inflection Points
 , ,
, ,  and
and
Abstract
:1. Introduction (and Motivation)
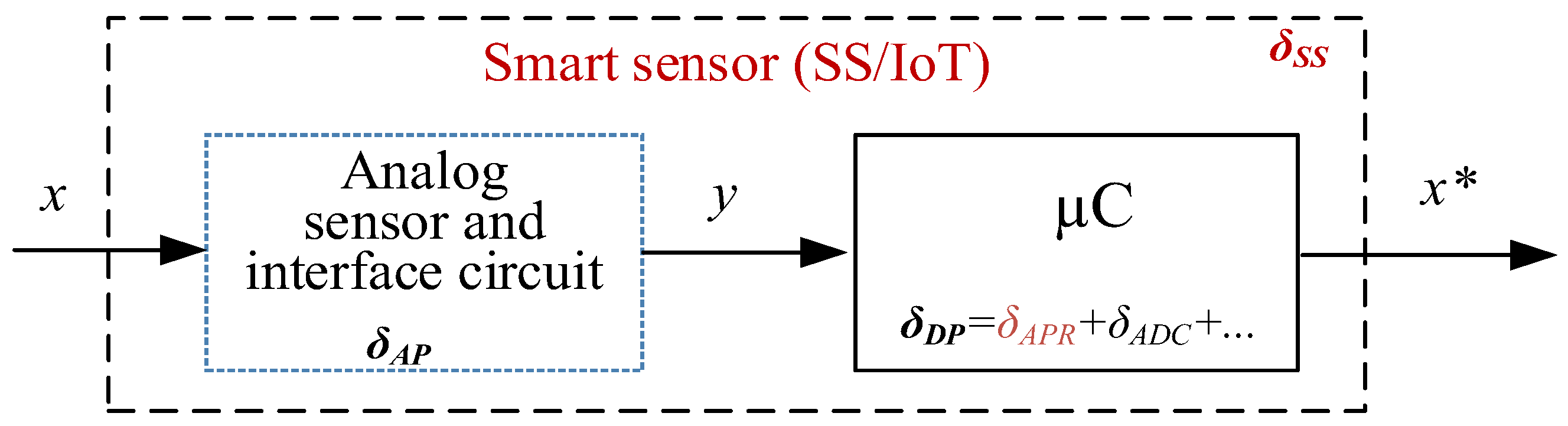
1.1. Resource-Constrained Smart Sensor Devices and IoT
1.2. The Main Error Components of Smart Sensors and IoT Devices
1.3. Sensor Characteristics Linearization Approaches
- -
- Analog hardware linearization schemes;
- -
- Linearization algorithms;
- -
- Mixed hardware and software-based approaches [11].
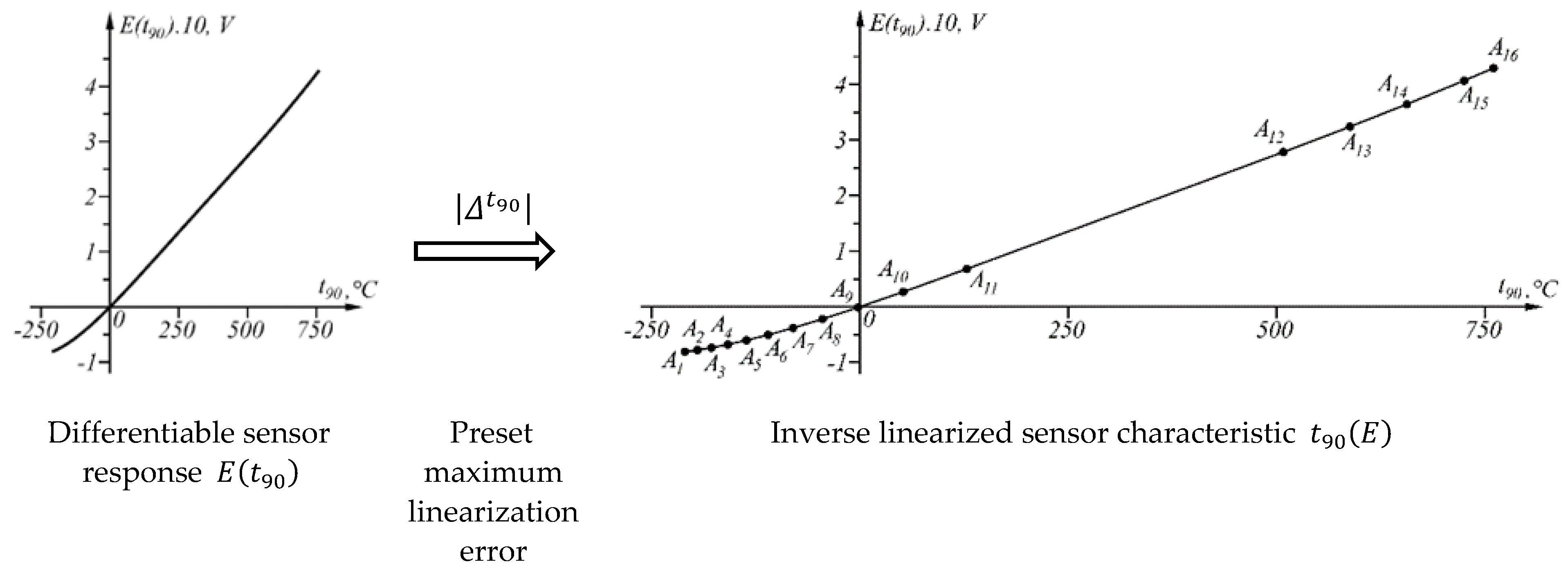
1.4. Piecewise Linear Approximation of Sensor Characteristics with Inflex Points
- -
- The approach is applied in intervals, and at each subsequent step (each subsequent interval) as a result of analogously solving the task under the new initial conditions, the desired solution is obtained directly, containing, in turn, the initial conditions for the next step;
- -
- The maximum linearization error of the inverse sensor characteristic in all intervals is the same;
- -
- The approach makes it possible to set a different maximum approximation error in each subsequent interval.
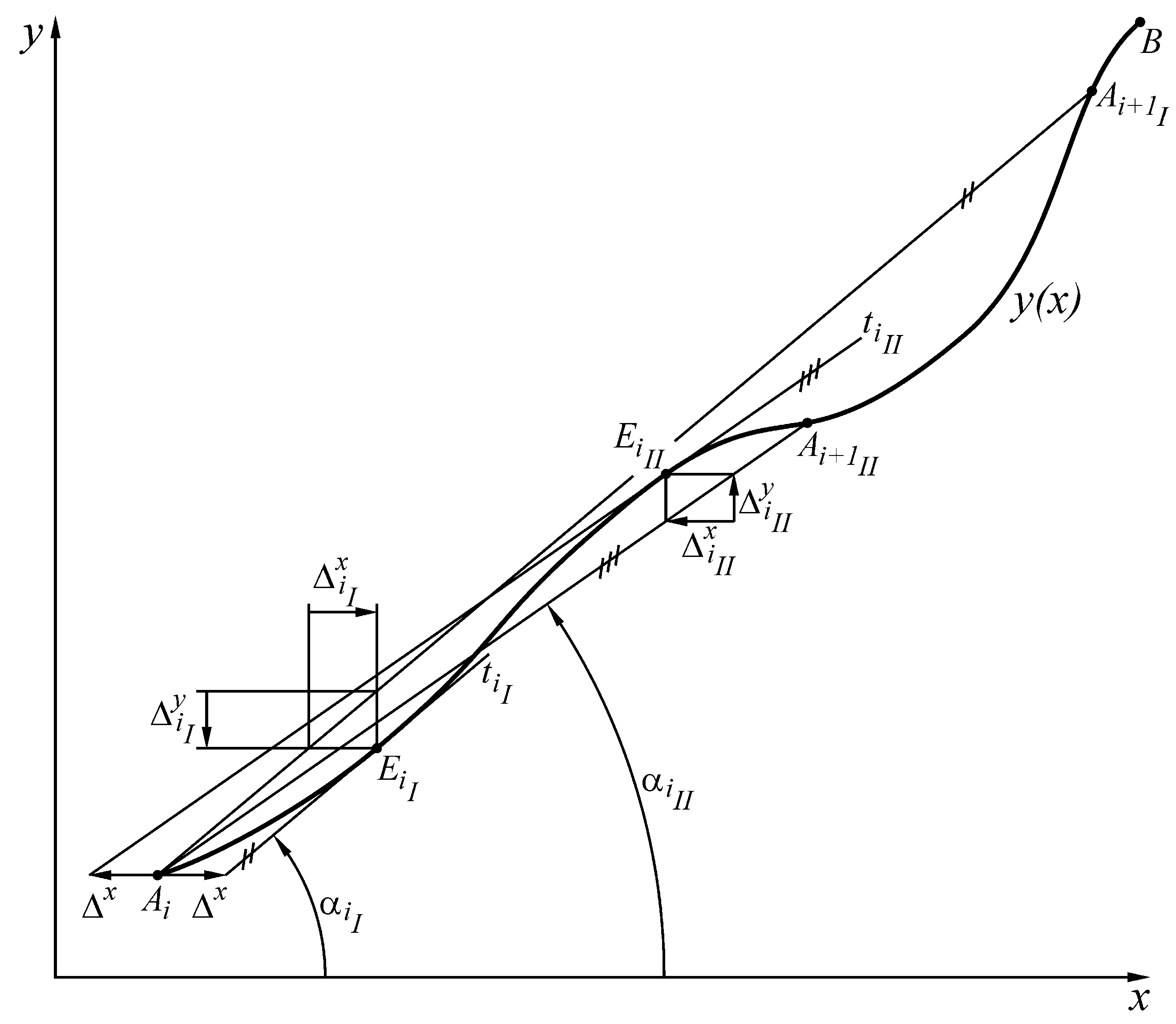
2. The Analytical Frame of the Proposed Approach
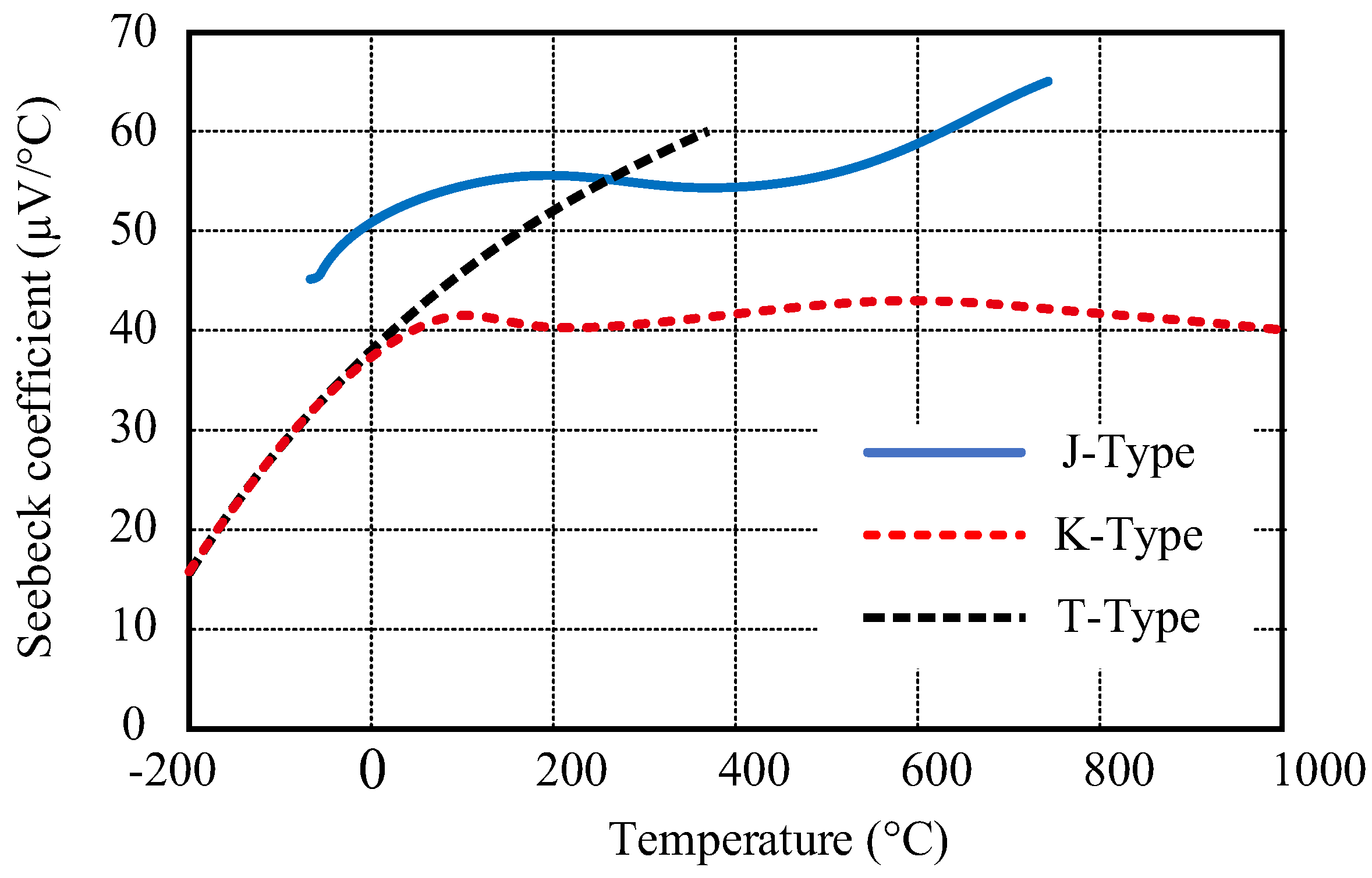
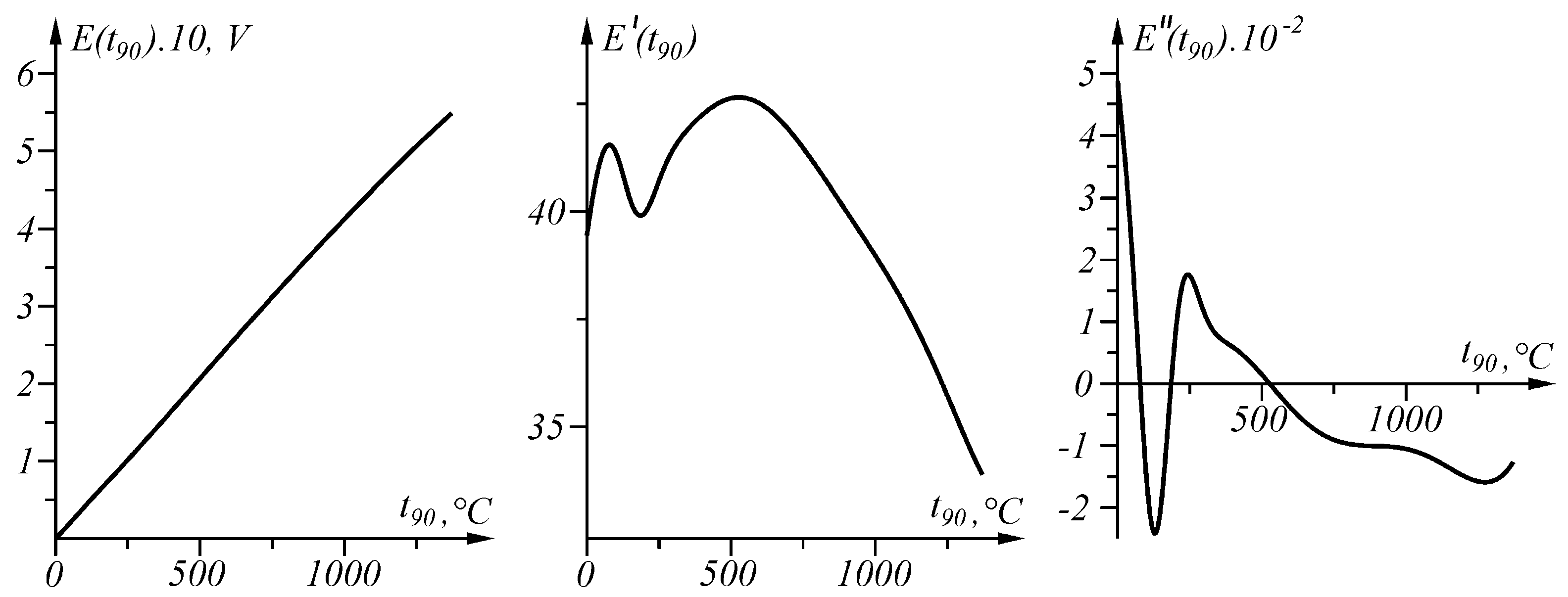
3. Linearization of the Inverse Sensor Characteristic of Type K and Type J Thermocouples
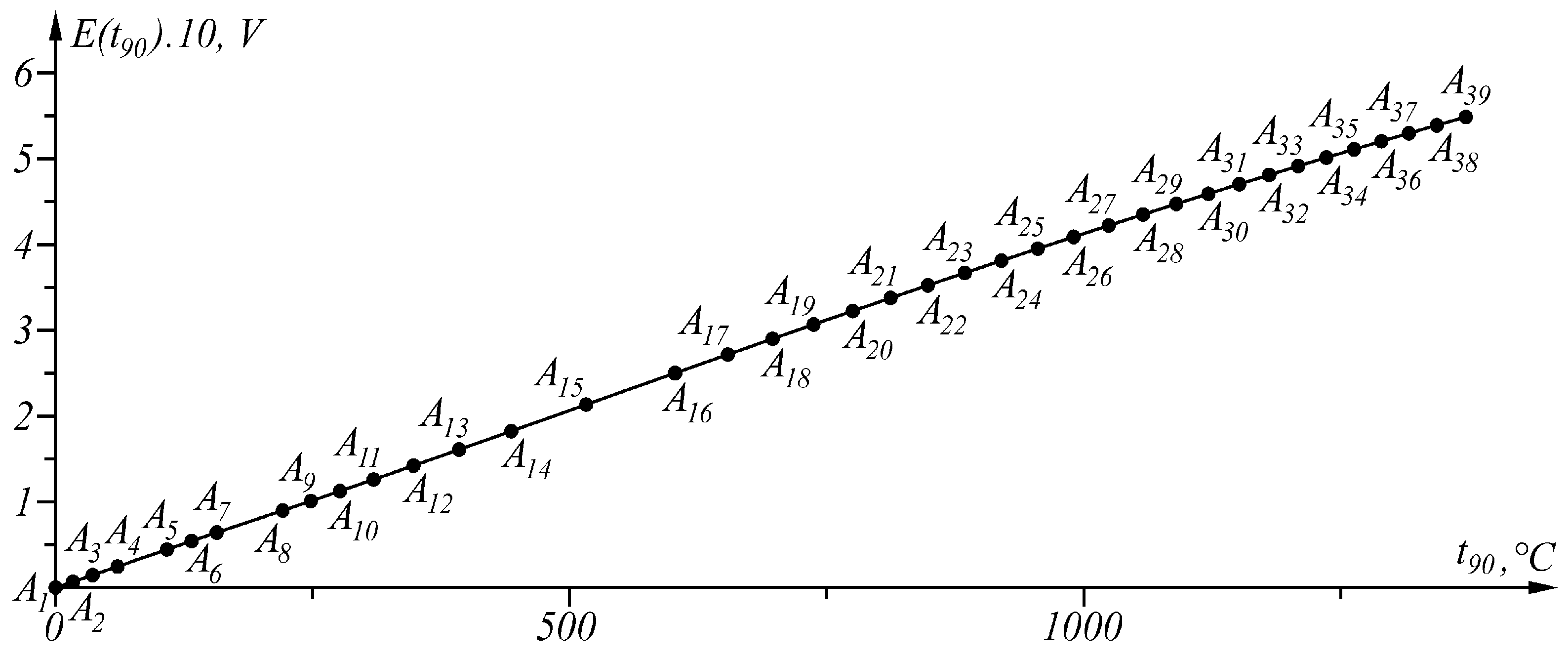
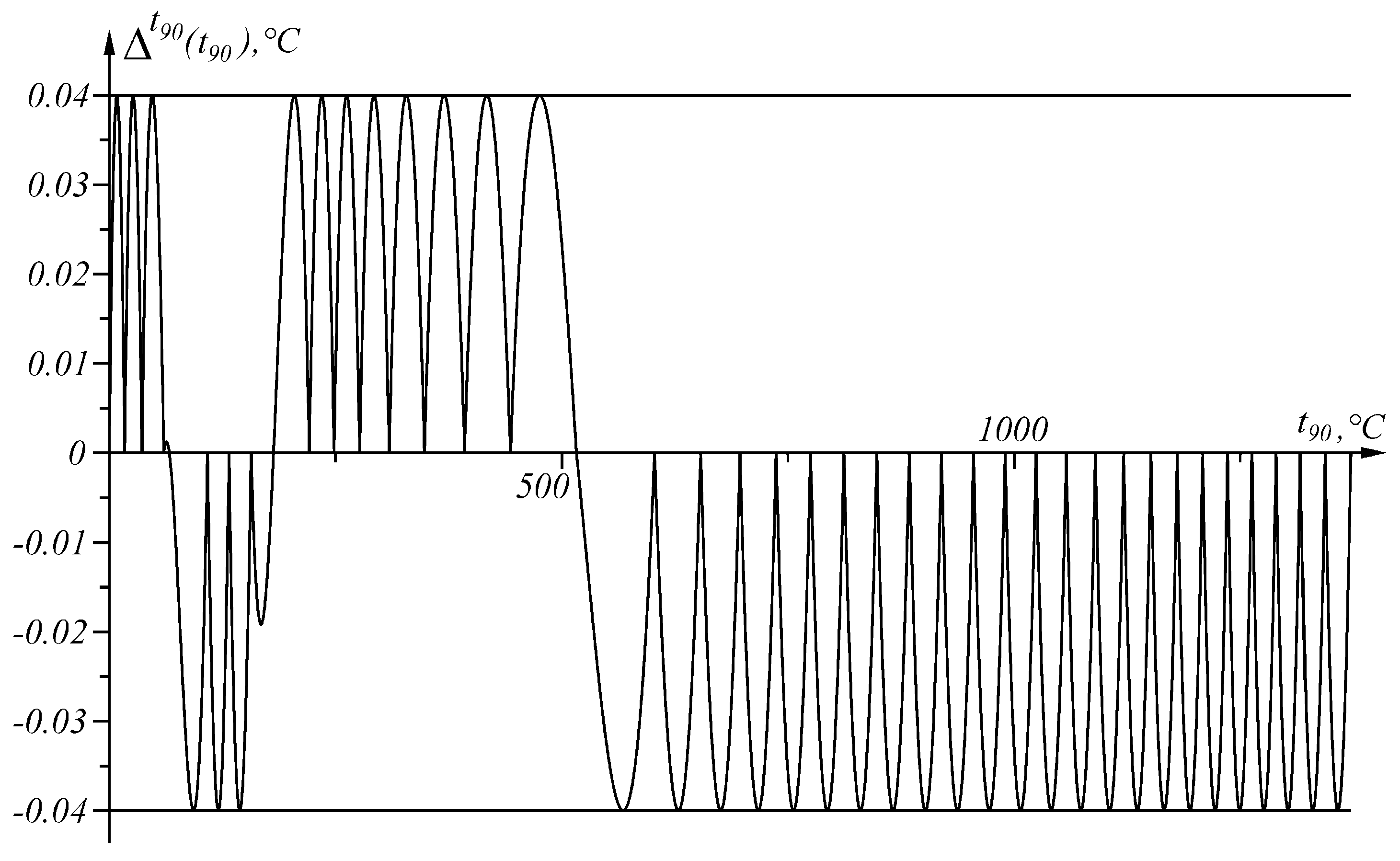
3.1. Type K Segmentation in the Temperature Range
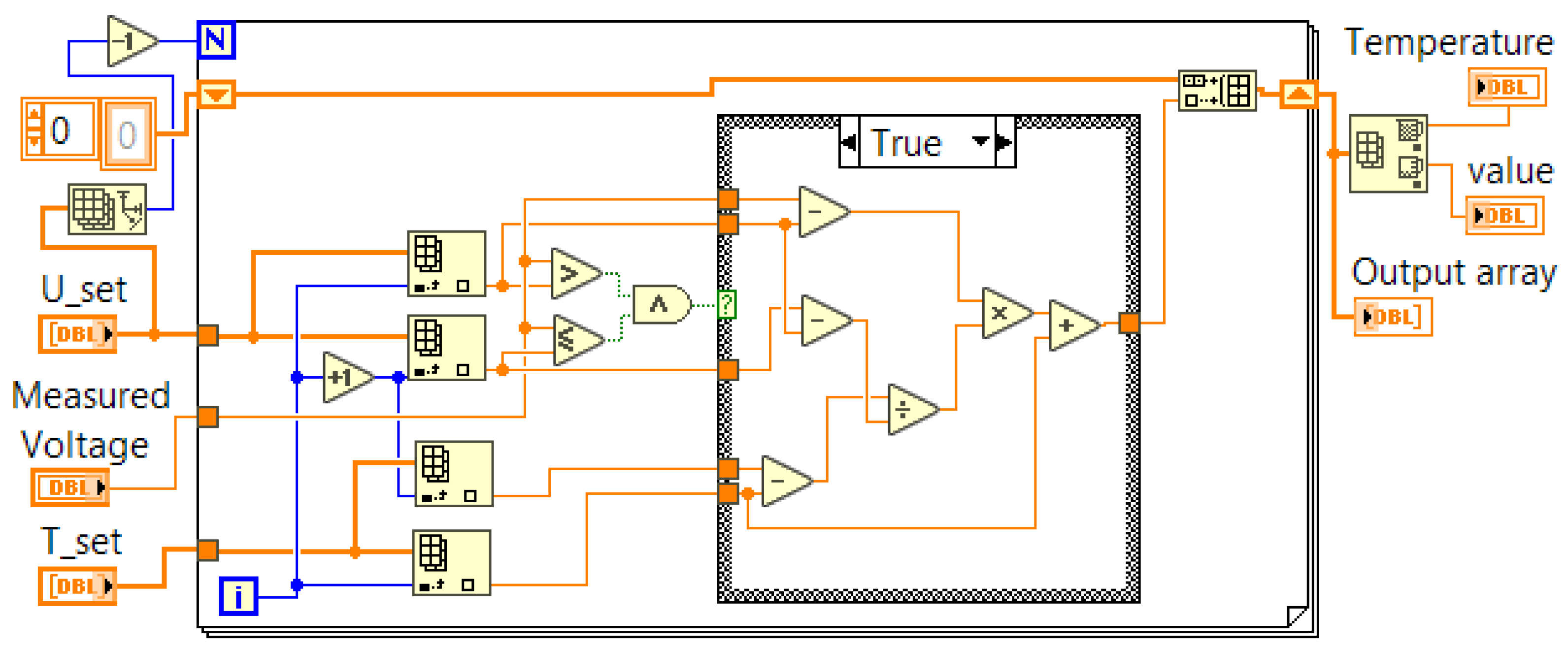
3.2. Microcontroller and LabVIEW Implementation of the Inverse Sensor Characteristics Linearization Algorithm
| Algorithm 1. Linearization of a k-Type thermocouple |
| Algorithm K-Type Linearization |
| Input: Measured and compensated voltage, Measured_Voltage, floating point type |
| Output: Calculated temperature, Temperature, floating point type |
| Initialization: Define the points determining the coordinates of each interval: |
| U_set[1], U_set[2]… U_set[End] and T_set[1], T_set[2]… T_set[End] |
| 1: Determine the interval, where the measured temperature is situated |
| If ((Measured_Voltage > U_set[n]) and (Measured_Voltage ≤ U_set[n+1])) |
| 2: Calculate the temperature by the formula |
| Temperature = (Measured_Voltage − U_set[n])×((T_set[n+1] − T_set[n])/(U_set[n+1] − U_set[n])) + T_set[n]; |
| 3: Return Temperature |
3.3. Linearization of the Inverse Characteristic of Type J Thermocouples in the Temperature Range
4. Conclusions
- -
- The approach is applied in intervals, and at each subsequent step (each subsequent interval), as a result of analogously solving the task under the new initial conditions, the desired solution is obtained directly, containing, in turn, the initial conditions for the next step;
- -
- The maximum linearization error of the inverse response of the sensor in all but the last interval is the same;
- -
- The approach makes it possible to set a different maximum predefined error bound in each subsequent interval.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Marinov, M.B.; Nikolov, N.; Dimitrov, S.; Todorov, T.; Stoyanova, Y.; Nikolov, G.T. Linear Interval Approximation for Smart Sensors and IoT Devices. Sensors 2022, 22, 949. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Liu, K.; Su, Y.; Ma, Y. Adaptive resource allocation algorithm for internet of things with bandwidth constraint. Trans. Tianjin Univ. 2012, 18, 253–258. [Google Scholar] [CrossRef]
- Liu, X.; Baiocchi, O. A comparison of the definitions for smart sensors, smart objects, and Things in IoT. In Proceedings of the IEEE 7th Annual Information Technology Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 13–15 October 2016. [Google Scholar]
- Oriwoh, E.; Conrad, M. ‘Things’ in the Internet of Things: Towards a definition. Int. J. Internet Things 2015, 4, 1–5. [Google Scholar]
- Liu, C.; Wu, K.; Pei, J. An Energy-Efficient Data Collection Framework for Wireless Sensor Networks by Exploiting Spatiotemporal Correlation. IEEE Trans. Parallel Distrib. Syst. 2007, 18, 1010–1023. [Google Scholar] [CrossRef] [Green Version]
- Hossain, M.M.; Fotouhi, M.; Hasan, R. Towards an Analysis of Security Issues, Challenges, and Open Problems in the Internet of Things. In Proceedings of the 2015 IEEE World Congress on Services, New York, NY, USA, 27 June–2 July 2015. [Google Scholar]
- Zahoor, S.; Mir, R. Resource management in pervasive Internet of Things: A survey. J. King Saud Univ.–Comput. Inf. Sci. 2018, 33, 921–935. [Google Scholar] [CrossRef]
- Chevrier, M. TI Designs. Optimized Sensor Linearization for Thermocouple. TIDUA11A; Texas Instruments Incorporated: Dallas, TX, USA, 2015; (revised September 2015). [Google Scholar]
- Attari, M. Methods for linearization of non-linear sensors. In Proceedings of the CMMNI-4, Fourth Maghrebin Conference on Numerical Methods of Engineering, Algiers, Algeria; 1993. [Google Scholar]
- Pereira, J.M.D.; Postolache, O.; Girao, P.M.B.S. PDF-Based Progressive Polynomial Calibration Method for Smart Sensors Linearization. IEEE Trans. Instrum. Meas. 2009, 58, 3245–3252. [Google Scholar] [CrossRef] [Green Version]
- Erdem, H. Implementation of software-based sensor linearization algorithms on low-cost microcontrollers. ISA Trans. 2010, 49, 552–558. [Google Scholar] [CrossRef] [PubMed]
- Johnson, C. Process Control Instrumentation Technology, 8th ed.; Pearson Education Limited: London, UK, 2013. [Google Scholar]
- Lundström, H.; Mattsson, M. Modified Thermocouple Sensor and External Reference Junction Enhance Accuracy in Indoor Air Temperature Measurements. Sensors 2021, 21, 6577. [Google Scholar] [CrossRef] [PubMed]
- Anandanatarajan, R.; Mangalanathan, U.; Gandhi, U. Linearization of Temperature Sensors (K-Type Thermocouple) Using Polynomial Non-Linear Regression Technique and an IoT-Based Data Logger Interface. Exp. Tech. 2022. [Google Scholar] [CrossRef]
- Marinov, M.; Dimitrov, S.; Djamiykov, T.; Dontscheva, M. An Adaptive Approach for Linearization of Temperature Sensor Characteristics. In Proceedings of the 27th International Spring Seminar on Electronics Technology, ISSE 2004, Bankya, Bulgaria, 13–16 May 2004. [Google Scholar]
- Šturcel, J.; Kamenský, M. Function approximation and digital linearization in sensor systems. ATP J. 2006, 1, 13–17. [Google Scholar]
- Flammini, A.; Marioli, D.; Taroni, A. Transducer output signal processing using an optimal look-up table in mi-crocontroller-based systems. Electron. Lett. 2010, 33, 552–558. [Google Scholar]
- Grützmacher, F.; Beichler, B.; Hein, A.; Kirste, T.; Haubelt, C. Time and Memory Efficient Online Piecewise Linear Approximation of Sensor Signals. Sensors 2018, 18, 1672. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Islam, T.; Mukhopadhyay, S. Linearization of the sensors characteristics: A review. Int. J. Smart Sens. Intell. Syst. 2019, 12, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Van der Horn, G.; Huijsing, J. Integrated Smart Sensors: Design and Calibration; Springer: New York, NY, USA, 2012. [Google Scholar]
- Ghosh, R.; Nag, S.; Gupta, R. A Software-based Linearization Technique for Thermocouples using Recurrent Neural Network. In Proceedings of the 2021 IEEE Mysore Sub Section International Conference (MysuruCon), Hassan, India, 24–25 October 2021; pp. 302–306. [Google Scholar]
- Srinivasan, K.; Sarawade, P.D. An Included Angle-Based Multilinear Model Technique for Thermocouple Linearization. IEEE Trans. Instrum. Meas. 2020, 69, 4412–4424. [Google Scholar] [CrossRef]
- Berahmand, K.; Mohammadi, M.; Saberi-Movahed, F.; Li, Y.; Xu, Y. Graph Regularized Nonnegative Matrix Factorization for Community Detection in Attributed Networks. IEEE Trans. Netw. Sci. Eng. 2022, 10, 372–385. [Google Scholar] [CrossRef]
- Nasiri, E.; Berahmand, K.; Li, Y. Robust graph regularization nonnegative matrix factorization for link prediction in attributed networks. Multimed. Tools Appl. 2022, 82, 3745–3768. [Google Scholar] [CrossRef]
- Yi, B.K.; Faloutsos, C. Fast time sequence indexing for arbitrary Lp norms. In Proceedings of the International Conference on Very Large Data Bases, San Francisco, CA, USA, 10–14 September 2000. [Google Scholar]
- Popivanov, I.; Miller, R. Similarity search over time-series data using wavelets. In Proceedings of the 18th International Conference on Data Engineering, San Jose, CA, USA, 26 February–1 March 2002. [Google Scholar]
- Rafiei, D.; Mendelzon, A. Similarity-based queries for time series data. In Proceedings of the IEEE International Conference on Data Engineering, Sydney, Australia, 23 March–26 March 1999. [Google Scholar]
- Cai, Y.; Ng, R. Indexing spatio-temporal trajectories with Chebyshev polynomials. In Proceedings of the ACM SIGMOD International Conference on Management of Data, New York, NY, USA, 13–18 June 2004. [Google Scholar]
- Palpanas, T.; Vlachos, M.; Keogh, E.; Gunopulos, D.; Truppel, W. Online amnesic approximation of streaming time series. In Proceedings of the IEEE International Conference on Data Engineering, Boston, MA, USA, 2 April 2004. [Google Scholar]
- Chen, Q.; Chen, L.; Lian, X.; Liu, Y.; Yu, J.X. Indexable PLA for efficient similarity search. In Proceedings of the International Conference on Very Large Data Bases, Vienna, Austria, 23–27 September 2007. [Google Scholar]
- Cameron, S.H. Piece-Wise linear approximations, DTIC Document. Tech. Note 1966. [Google Scholar] [CrossRef]
- Luo, G.; Yi, K.; Cheng, S.W.; Li, Z.; Fan, W.; He, C.; Mu, Y. Piecewise linear approximation of streaming time-series data with max-error guarantees. In Proceedings of the 2015 IEEE 31st International Conference on Data Engineering (ICDE), Seoul, Republic of Korea, 13–17 April 2015. [Google Scholar]
- Lemire, D. A better alternative to piecewise linear time-series segmentation. In Proceedings of the 2007 SIAM International Conference on Data Mining, Minneapolis, MN, USA, 28 April 2007. [Google Scholar]
- Haney, Library for Accurate Pt100 RTD Ohms-to-Celsius Conversion. 2018. Available online: https://github.com/drhaney/pt100rtd/tree/master/examples/pt100_temperature (accessed on 19 November 2021).
- Keogh, E.; Chu, S.; Hart, D.; Pazzani, M. An online algorithm for segmenting time series. In Proceedings of the IEEE International Conference on Data Mining, ICDM2001, San Jose, CA, USA, 29 November 2001. [Google Scholar]
- Duff, M.; Towey, J. Two Ways to Measure Temperature Using Thermocouples Feature Simplicity, Accuracy, and Flexibility. Analog. Dialogue Vols. 2010, 1–6. [Google Scholar]
- Candela, G. TI Designs. Isolated Loop Powered Thermocouple Transmitter. TIDU449B; Texas Instruments Incorporated: Dallas, TX, USA, 2014; (revised July 2016). [Google Scholar]
- Rembor, K. Adafruit ESP32 Feather V2. 1 December 2022. Available online: https://cdn-learn.adafruit.com/downloads/pdf/adafruit-esp32-feather-v2.pdf (accessed on 8 December 2022).
- Systems, E. ESP32PICOMINI02 Datasheet. 2022. Available online: https://www.espressif.com/sites/default/files/documentation/esp32-pico-mini-02_datasheet_en.pdf (accessed on 8 December 2022).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
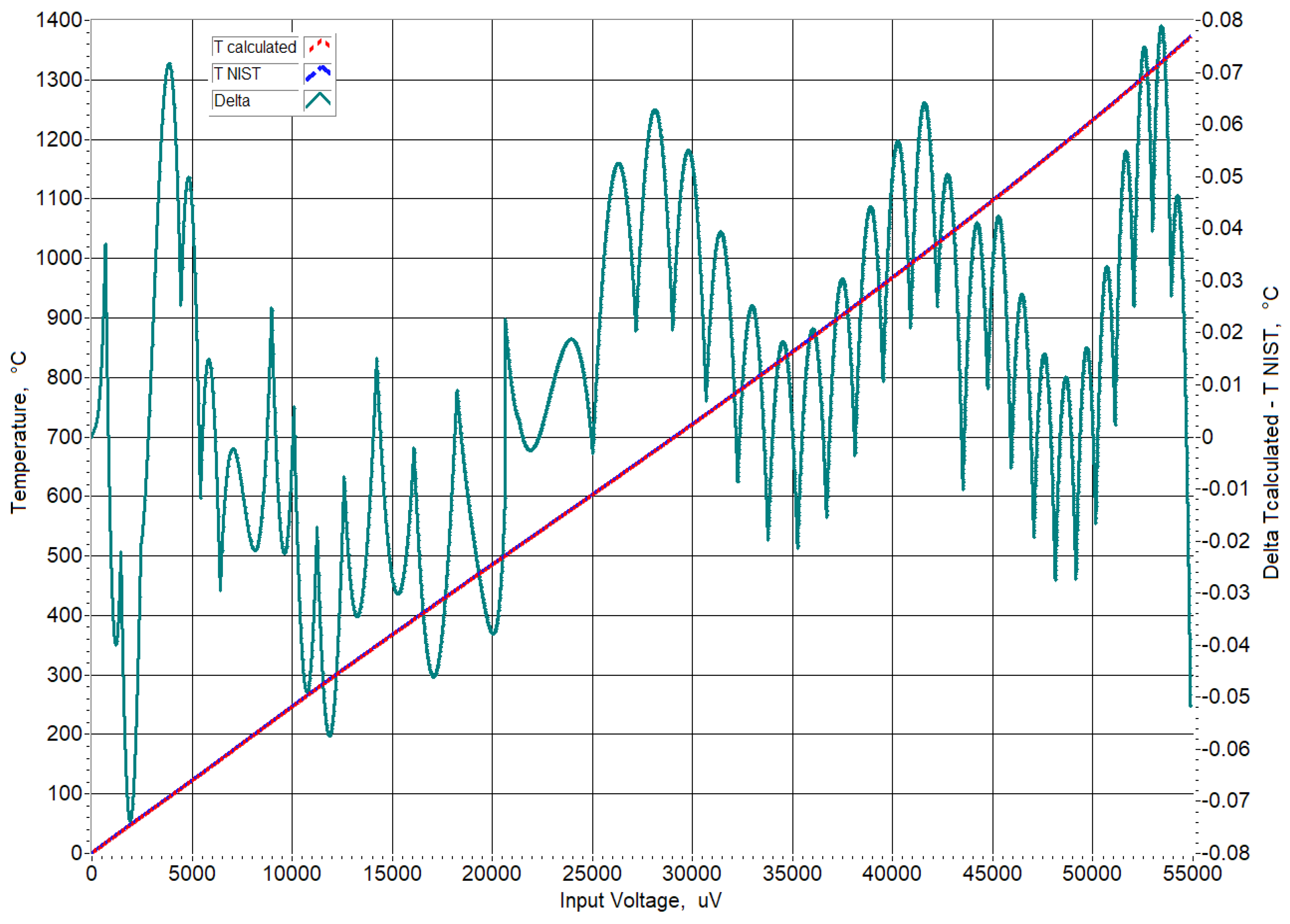
| Temperature Range: | −200 to 0 °C | 0 to 500 °C | 500 to 1 372 °C |
|---|---|---|---|
| Voltage Range: | −5891 to 0 μV | 0 to 20,644 μV | 20 644 to 54,886 μV |
| Error Range: | 0.04 °C to −0.02 °C | 0.04 °C to −0.05 °C | 0.06 °C to −0.05 °C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marinov, M.B.; Nikolov, N.; Dimitrov, S.; Ganev, B.; Nikolov, G.T.; Stoyanova, Y.; Todorov, T.; Kochev, L. Linear Interval Approximation of Sensor Characteristics with Inflection Points. Sensors 2023, 23, 2933. https://doi.org/10.3390/s23062933
Marinov MB, Nikolov N, Dimitrov S, Ganev B, Nikolov GT, Stoyanova Y, Todorov T, Kochev L. Linear Interval Approximation of Sensor Characteristics with Inflection Points. Sensors. 2023; 23(6):2933. https://doi.org/10.3390/s23062933
Chicago/Turabian StyleMarinov, Marin B., Nikolay Nikolov, Slav Dimitrov, Borislav Ganev, Georgi T. Nikolov, Yana Stoyanova, Todor Todorov, and Lachezar Kochev. 2023. "Linear Interval Approximation of Sensor Characteristics with Inflection Points" Sensors 23, no. 6: 2933. https://doi.org/10.3390/s23062933