

Micromagnetic and Robust Evaluation of Surface Hardness in Cr12MoV Steel Considering Repeatability of the Instrument


Abstract
:1. Introduction
2. Experiments
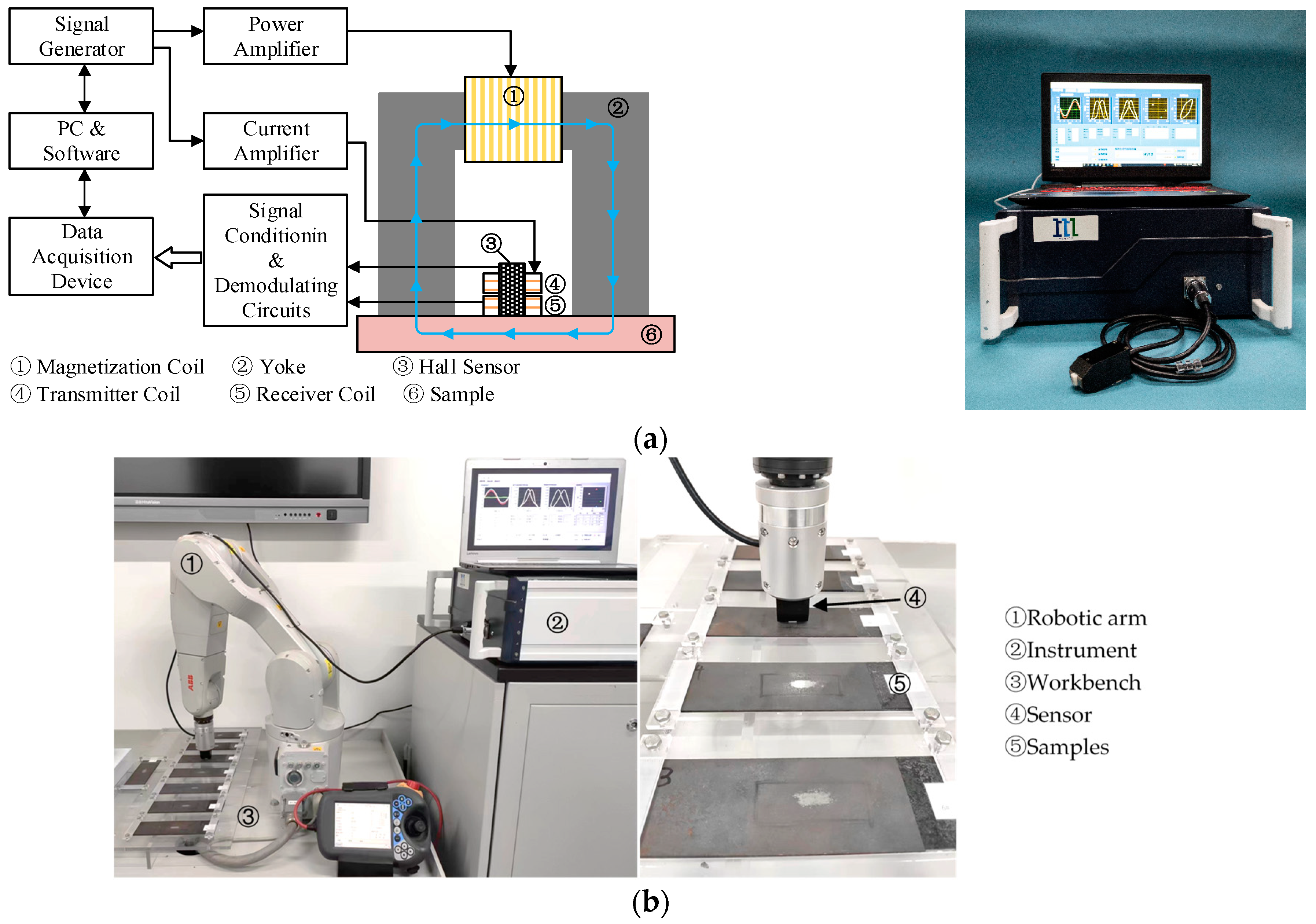
2.1. Experimental Set-Up
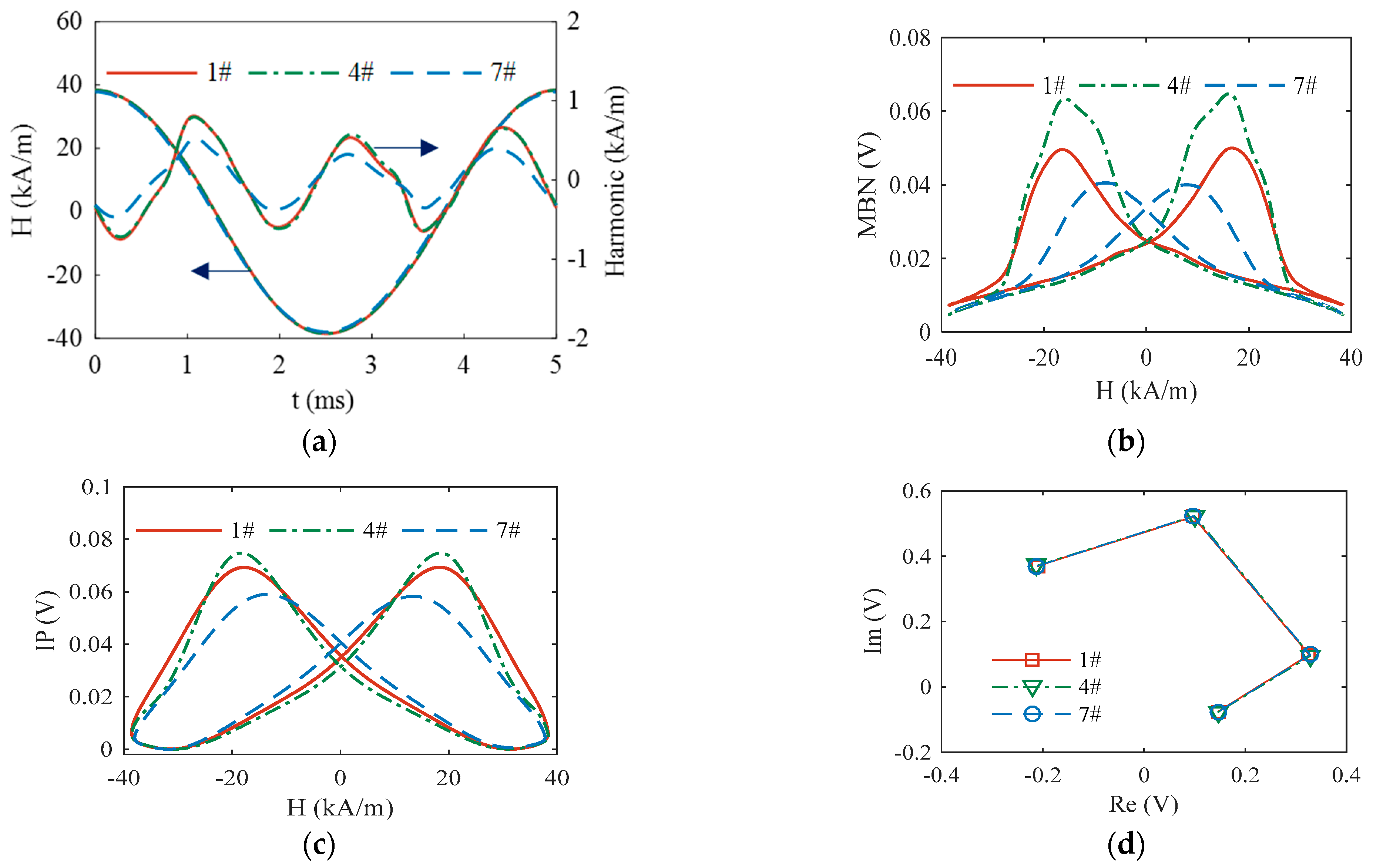
2.2. Experimental Results
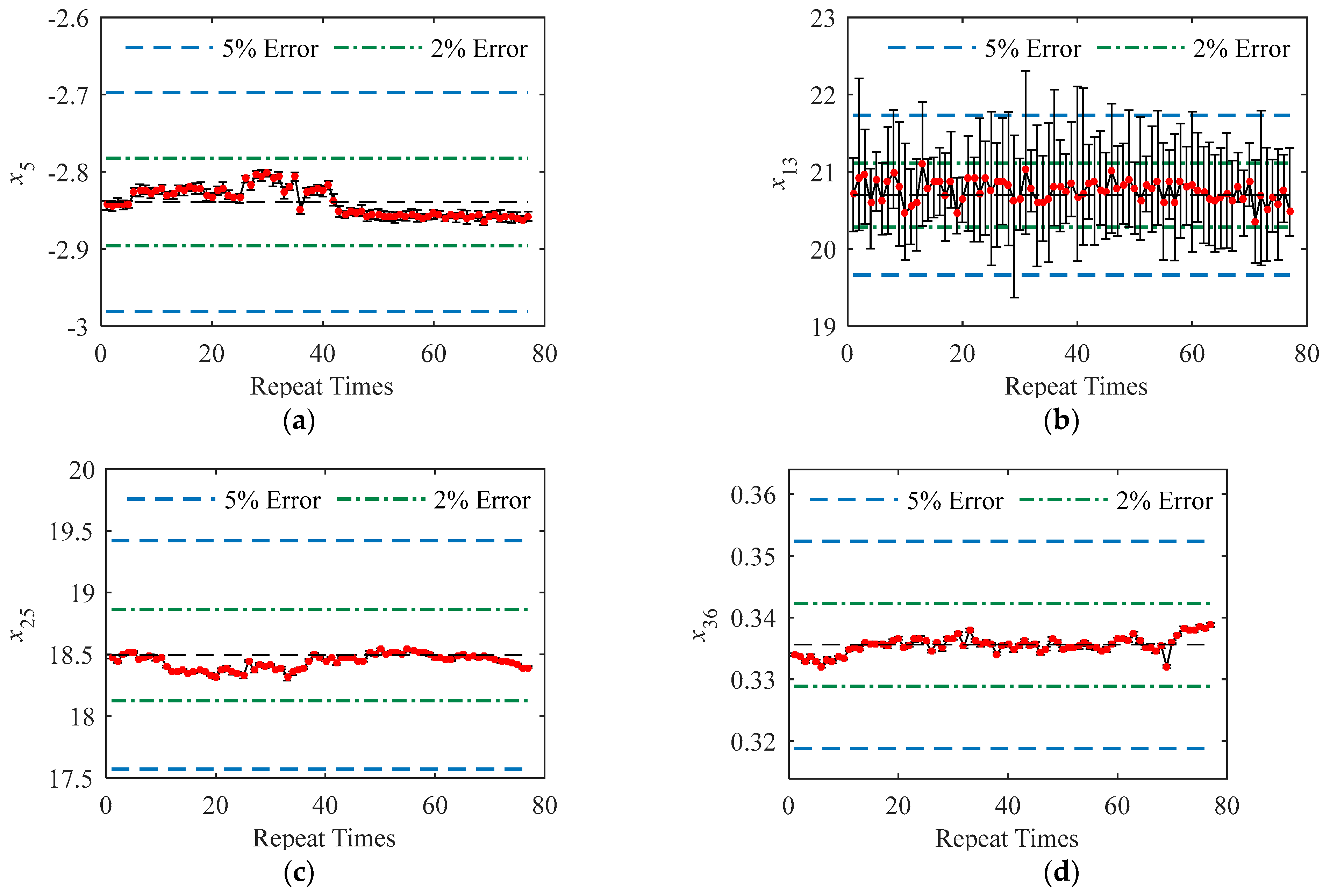
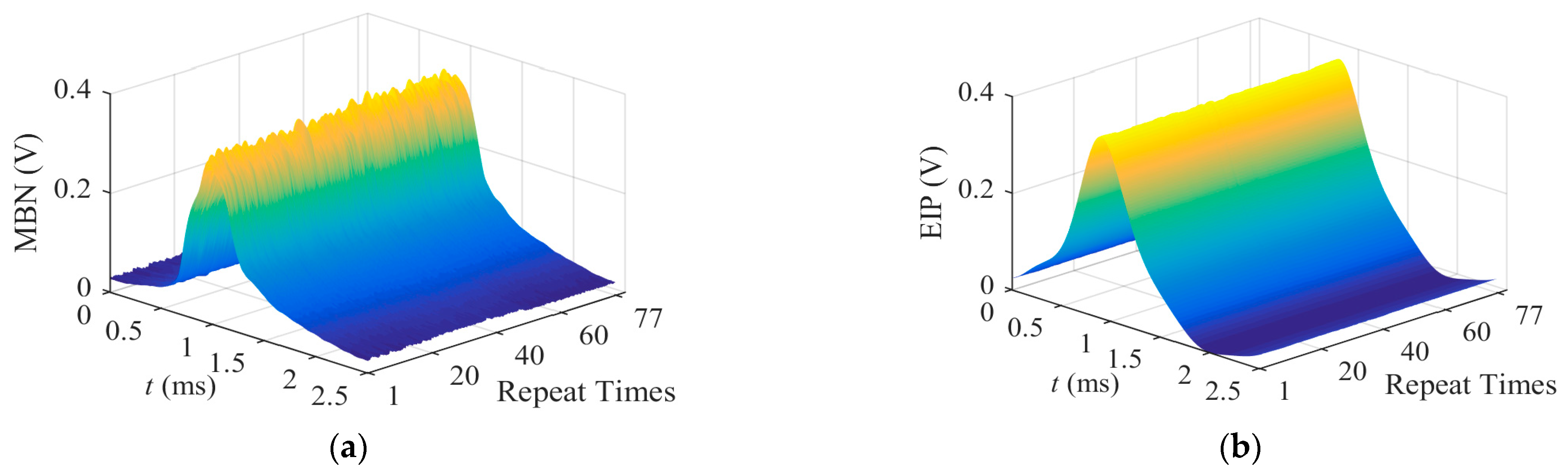
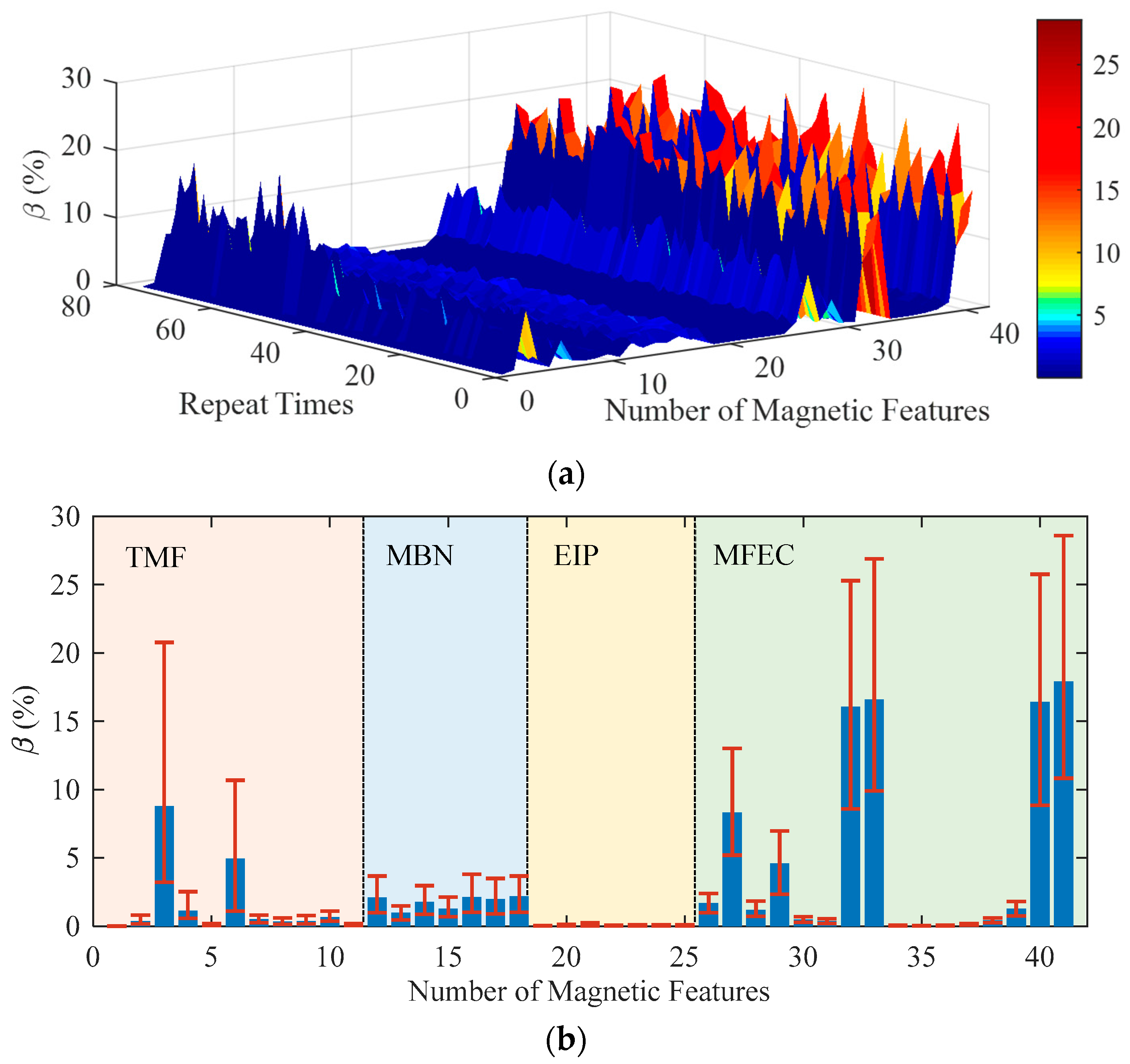
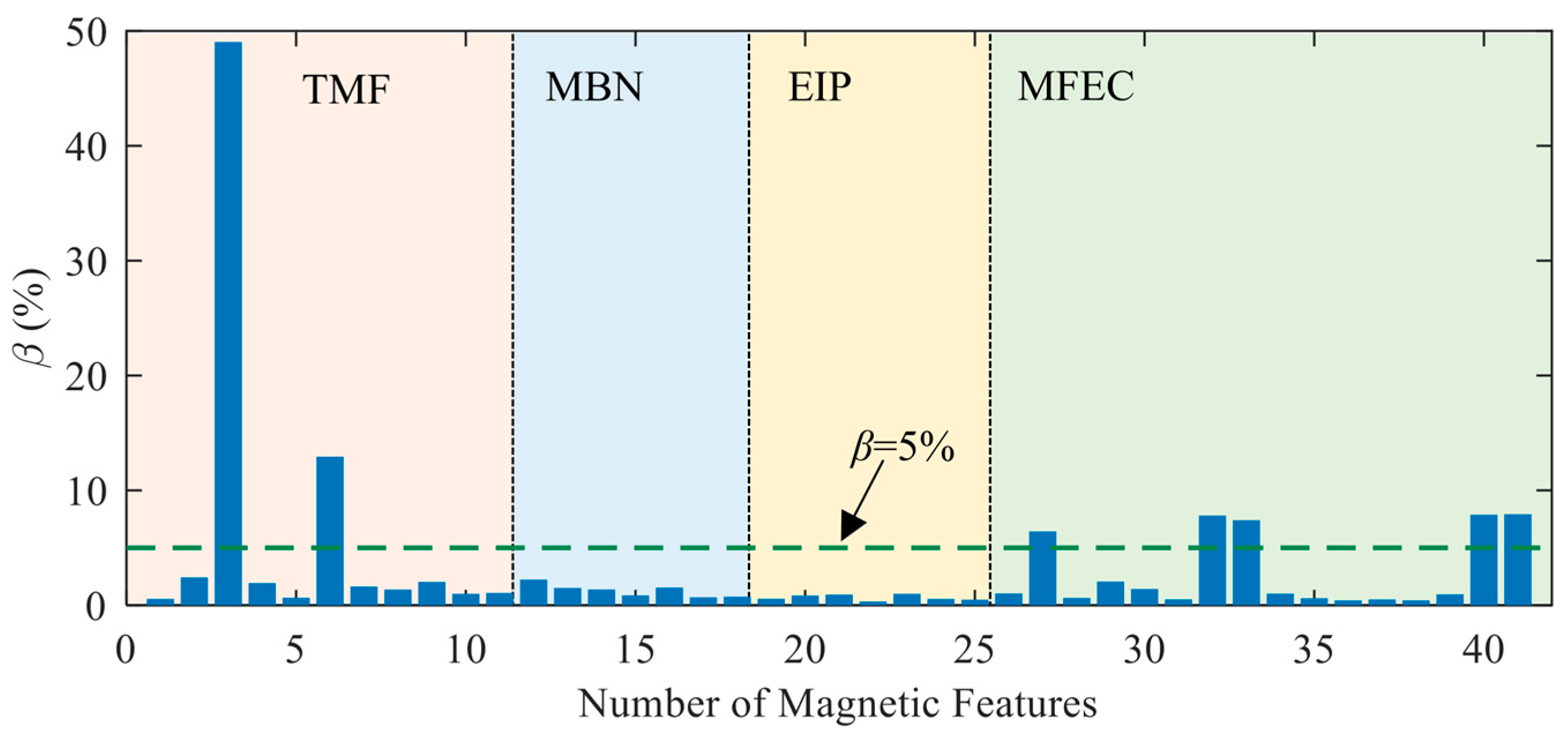
3. Repeatability of the Instrument
4. Establishment of the Prediction Models
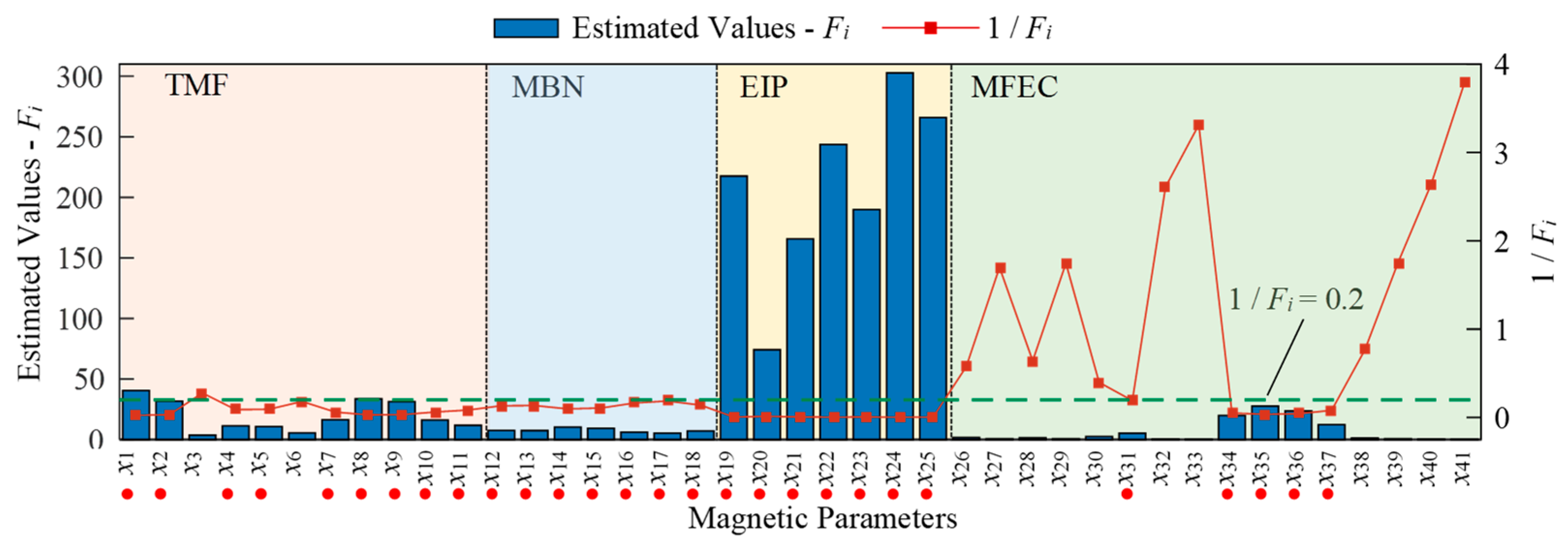
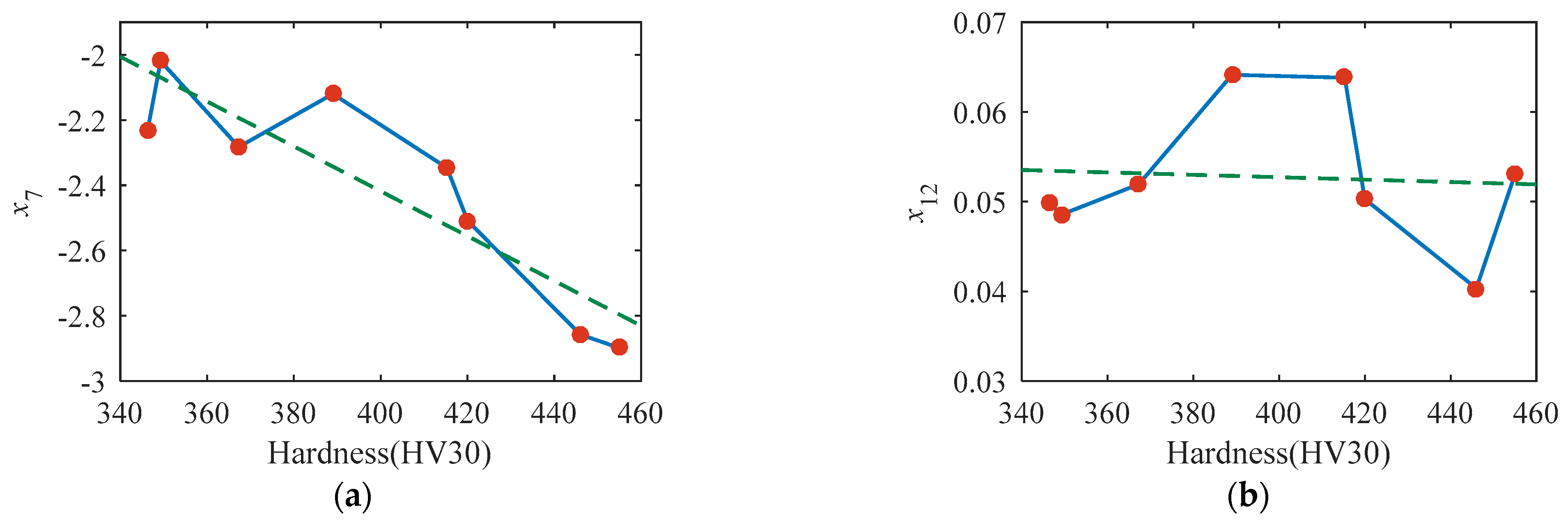
4.1. Feature Selection
4.2. Modelling Strategy
5. Robustness Evaluation of Prediction Models
6. Conclusions
- The evaluation results obtained under both static and dynamic conditions verified that the self-developed multifunctional micromagnetic instrument had good repeatability in measuring the magnetic features of EIP and MBN and most of the magnetic features of TMF.
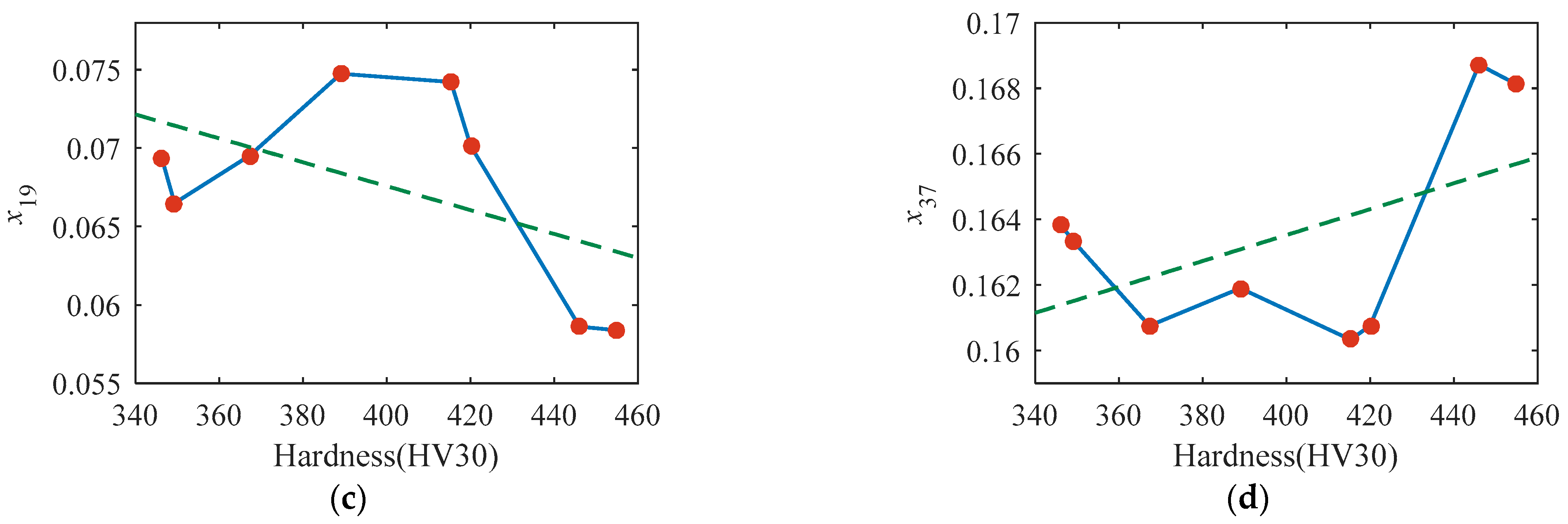
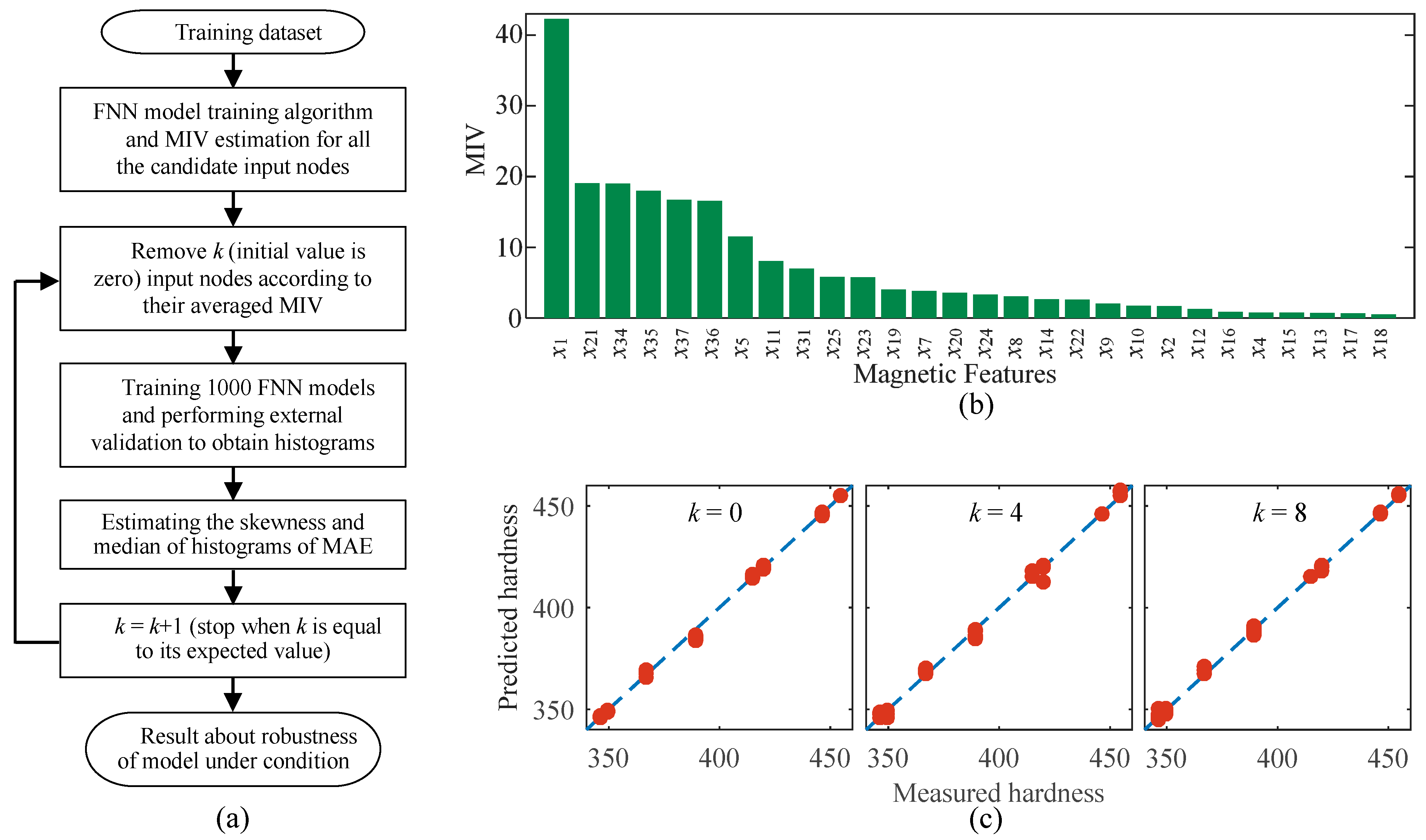
- Through the indicator combination of Fi and β, magnetic features of good repeatability and good performance in surface hardness evaluation could be selected. However, the selection of input nodes from the filtered magnetic features should be further explored. The magnetic features with high MIV negatively affected the robustness of prediction models.
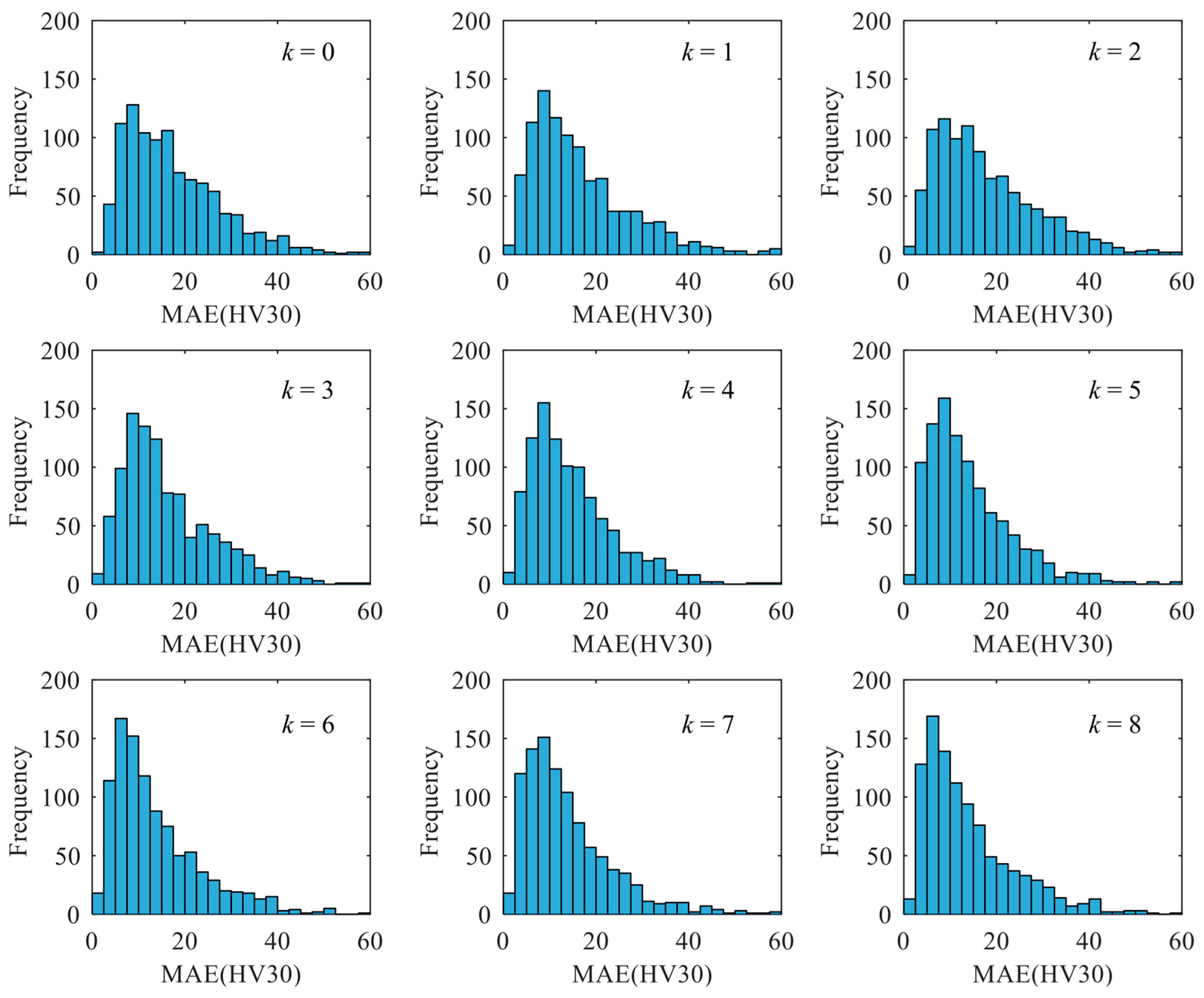
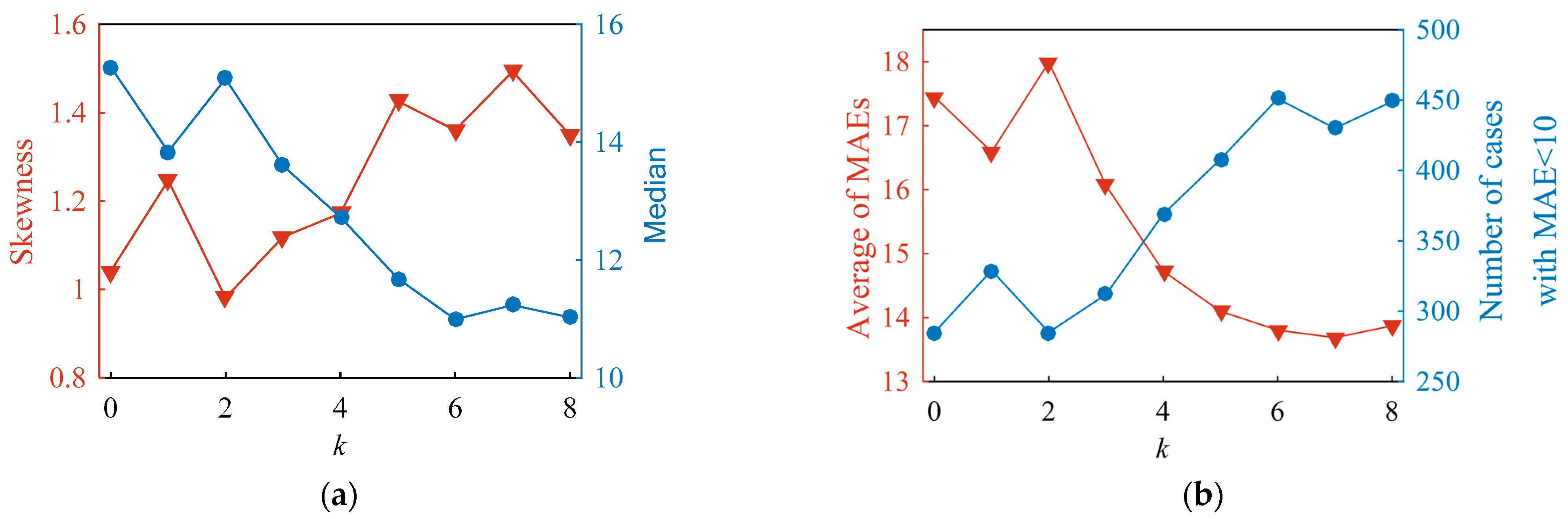
- Based on the consideration of the balance between the MIV of input nodes and the robustness of prediction models, removing partial magnetic features of high MIV from the input nodes could improve the robustness of prediction models.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Descriptions | |
|---|---|---|
| TMF | x1 | Amplitude of of TMF |
| x2, x3, x4 | Amplitudes of the 1st, 3rd, 5th and 7th harmonics | |
| x5, x6, x7 | Phases of the 3rd, 5th and 7th harmonics | |
| x8 | Distortion factor, | |
| x9 | Sum of the amplitudes of the 3rd, 5th and 7th harmonics | |
| x10 | Harmonic amplitude at the tangential magnetic field crossing the zero point | |
| x11 | Amplitude of the harmonic component of tangential magnetic field at the first zero-crossing point | |
| MBN | x12 | Peak height of the MBN butterfly curve |
| x13 | Mean value of MBN envelope for a single magnetization cycle | |
| x14 | Intercept of MBN envelope at the vertical axis | |
| x15 | Peak position of the MBN butterfly curve | |
| x16 | Full width at 25% of maxima of MBN butterfly curve | |
| x17 | Full width at half maxima of MBN butterfly curve | |
| x18 | Full width at 75% of maxima of MBN butterfly curve | |
| EIP | x19 | Peak height of the EIP butterfly curve |
| x20 | Mean value of EIP envelope for a single magnetization cycle | |
| x21 | Intercept of EIP envelope at the vertical axis | |
| x22 | Peak position of the EIP butterfly curve | |
| x23 | Full width at 25% of maxima of EIP butterfly curve | |
| x24 | Full width at half maxima of EIP butterfly curve | |
| x25 | Full width at 75% of maxima of EIP butterfly curve | |
| MFEC | x26, x27, x28, x29 | Real parts of four frequencies of eddy current signals |
| x30, x31, x32, x33 | Imaginary part of four frequencies of eddy current signals | |
| x34, x35, x36, x37 | Amplitudes of four frequencies of eddy current signals | |
| x38, x39, x40, x41 | Phases of four frequencies of eddy currents |
References
- Dobmann, G. Physical basics and industrial applications of 3MA–micromagnetic multiparameter microstructure and stress analysis. In Proceedings of the 10th European Conference on Nondestructive Testing (ECNDT 2010), Moscow, Russia, 7–11 June 2010. [Google Scholar]
- Mohapatra, J.N.; Kumar, S.; Akela, A.K.; Prakash Rao, S.; Kaza, M. Magnetic hysteresis loop as a tool for the evaluation of microstructure and mechanical properties of DP steels. J. Mater. Eng. Perform. 2016, 25, 2318–2325. [Google Scholar] [CrossRef]
- Vourna, P.; Ktena, A.; Tsakiridis, P.E.; Hristoforou, E. An accurate evaluation of the residual stress of welded electrical steels with magnetic Barkhausen noise. Measurement 2015, 71, 31–45. [Google Scholar] [CrossRef]
- Gabi, Y.; Martins, O.; Wolter, B.; Strass, B. Combination of electromagnetic measurements and FEM simulations for nondestructive determination of mechanical hardness. AIP Adv. 2018, 8, 047502. [Google Scholar] [CrossRef]
- Liu, X.; Shang, W.; He, C.; Zhang, R.; Wu, B. Simultaneous quantitative prediction of tensile stress, surface hardness and case depth in medium carbon steel rods based on multifunctional magnetic testing techniques. Measurement 2018, 128, 455–463. [Google Scholar] [CrossRef]
- Wolter, B.; Gabi, Y.; Conrad, C. Nondestructive testing with 3MA—An overview of principles and applications. Appl. Sci. 2019, 9, 1068. [Google Scholar] [CrossRef] [Green Version]
- Ankener, W.; Böttger, D.; Smaga, M.; Gabi, Y.; Strass, B.; Wolter, B.; Beck, T. Micromagnetic and microstructural characterization of ferromagnetic steels in different heat treatment conditions. Sensors 2022, 22, 4428. [Google Scholar] [CrossRef] [PubMed]
- Stupakov, A.; Perevertov, O.; Zablotskii, V. A system for controllable magnetic measurements of hysteresis and Barkhausen noise. IEEE Trans. Instrum. Meas. 2015, 65, 1087–1097. [Google Scholar] [CrossRef]
- Sorsa, A.; Leiviskä, K.; Santa-aho, S.; Lepistö, T. Quantitative prediction of residual stress and hardness in case-hardened steel based on the Barkhausen noise measurement. NDT&E Int. 2012, 46, 100–106. [Google Scholar]
- Dong, H.; Liu, X.; Song, Y.; Wang, B.; Chen, S.; He, C. Quantitative evaluation of residual stress and surface hardness in deep drawn parts based on magnetic Barkhausen noise technology. Measurement 2021, 168, 108473. [Google Scholar] [CrossRef]
- Wang, X.; He, C.; Li, P.; Liu, X.; Xing, Z.; Yan, Z. Micromagnetic and Quantitative Prediction of Surface Hardness in Carbon Steels Based on a Joint Classification-Regression Method. J. Nondestruct. Eval. 2022, 41, 1–13. [Google Scholar] [CrossRef]
- Sheng, H.; Wang, P.; Tang, C. Predicting mechanical properties of cold-rolled steel strips using micro-magnetic ndt technologies. Materials 2022, 15, 2151. [Google Scholar] [CrossRef]
- Jedamski, R.; Epp, J. Non-destructive micromagnetic determination of hardness and case hardening depth using linear regression analysis and artificial neural networks. Metals 2020, 11, 18. [Google Scholar] [CrossRef]
- Ahadi Akhlaghi, I.; Kahrobaee, S.; Akbarzadeh, A.; Kashefi, M.; Krause, T.W. Predicting hardness profile of steel specimens subjected to Jominy test using an artificial neural network and electromagnetic nondestructive techniques. Nondestruct. Test. Eval. 2021, 36, 459–475. [Google Scholar] [CrossRef]
- Mirzaee, A.; Kahrobaee, S.; Ahadi Akhlaghi, I. Non-destructive determination of microstructural/mechanical properties and thickness variations in API X65 steel using magnetic hysteresis loop and artificial neural networks. Nondestruct. Test. Eval. 2020, 35, 190–206. [Google Scholar] [CrossRef]
- Wang, P.; Ji, X.; Zhu, L.; Tian, G.; Yao, E. Stratified analysis of the magnetic Barkhausen noise signal based on wavelet decomposition and back propagation neural network. Sens. Actuator A-Phys. 2013, 201, 421–427. [Google Scholar] [CrossRef]
- Xing, Z.X.; Liu, X.C.; He, C.F. Design of A Multifunctional Micro-Magnetic Testing Instrument. J. Phys. Conf. Ser. 2022, 2198, 012032. [Google Scholar] [CrossRef]
- Ktena, A.; Hristoforou, E.; Gerhardt, G.J.; Missell, F.P.; Landgraf, F.J.; Rodrigues, D.L., Jr.; Alberteris-Campos, M. Barkhausen noise as a microstructure characterization tool. Phys. B Condens. Matter 2014, 435, 109–112. [Google Scholar] [CrossRef]













| Specimen Nos. | Hardness (HV30) | ||
|---|---|---|---|
| Position 1 | Position 2 | Position 3 | |
| 1# | 347 | 346 | 346 |
| 2# | 350 | 349 | 349 |
| 3# | 369 | 367 | 366 |
| 4# | 392 | 386 | 389 |
| 5# | 414 | 416 | 416 |
| 6# | 420 | 420 | 420 |
| 7# | 448 | 444 | 446 |
| 8# | 457 | 453 | 455 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, Z.; Wang, X.; Ning, M.; He, C.; Liu, X. Micromagnetic and Robust Evaluation of Surface Hardness in Cr12MoV Steel Considering Repeatability of the Instrument. Sensors 2023, 23, 1273. https://doi.org/10.3390/s23031273
Xing Z, Wang X, Ning M, He C, Liu X. Micromagnetic and Robust Evaluation of Surface Hardness in Cr12MoV Steel Considering Repeatability of the Instrument. Sensors. 2023; 23(3):1273. https://doi.org/10.3390/s23031273
Chicago/Turabian StyleXing, Zhixiang, Xianxian Wang, Mengshuai Ning, Cunfu He, and Xiucheng Liu. 2023. "Micromagnetic and Robust Evaluation of Surface Hardness in Cr12MoV Steel Considering Repeatability of the Instrument" Sensors 23, no. 3: 1273. https://doi.org/10.3390/s23031273