

Nonlinear Vibration Control Experimental System Design of a Flexible Arm Using Interactive Actuations from Shape Memory Alloy

Abstract
:1. Introduction
2. Preliminary and Problem Setup
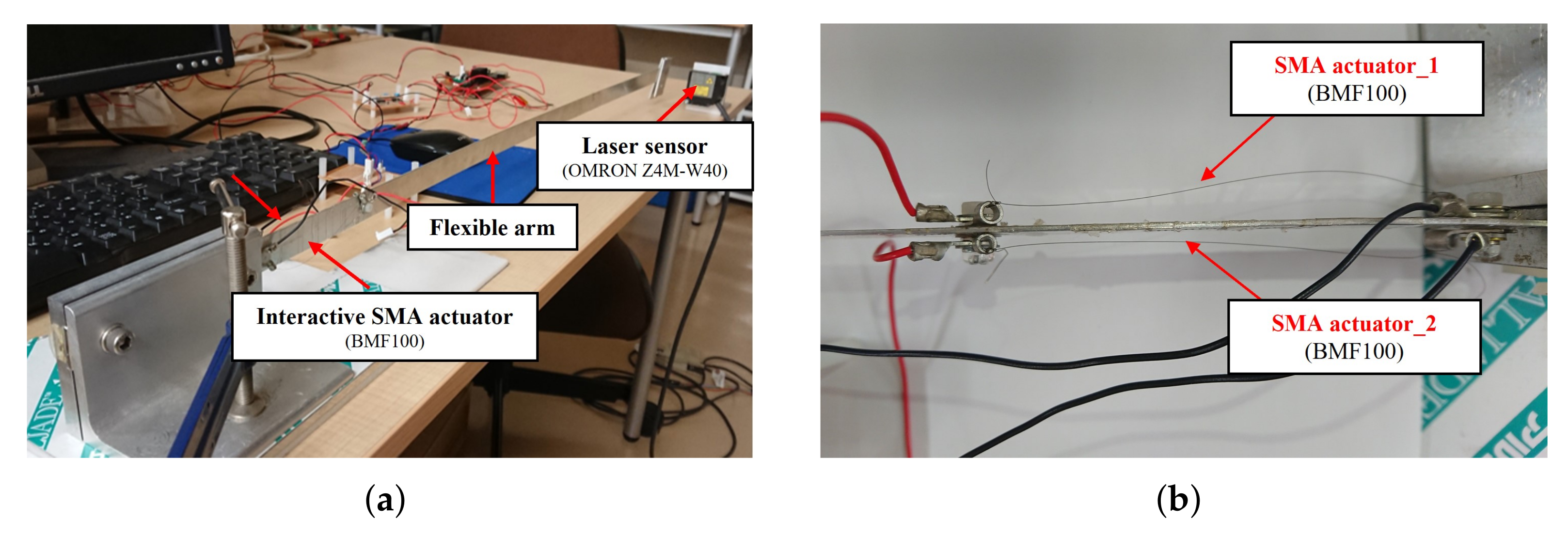
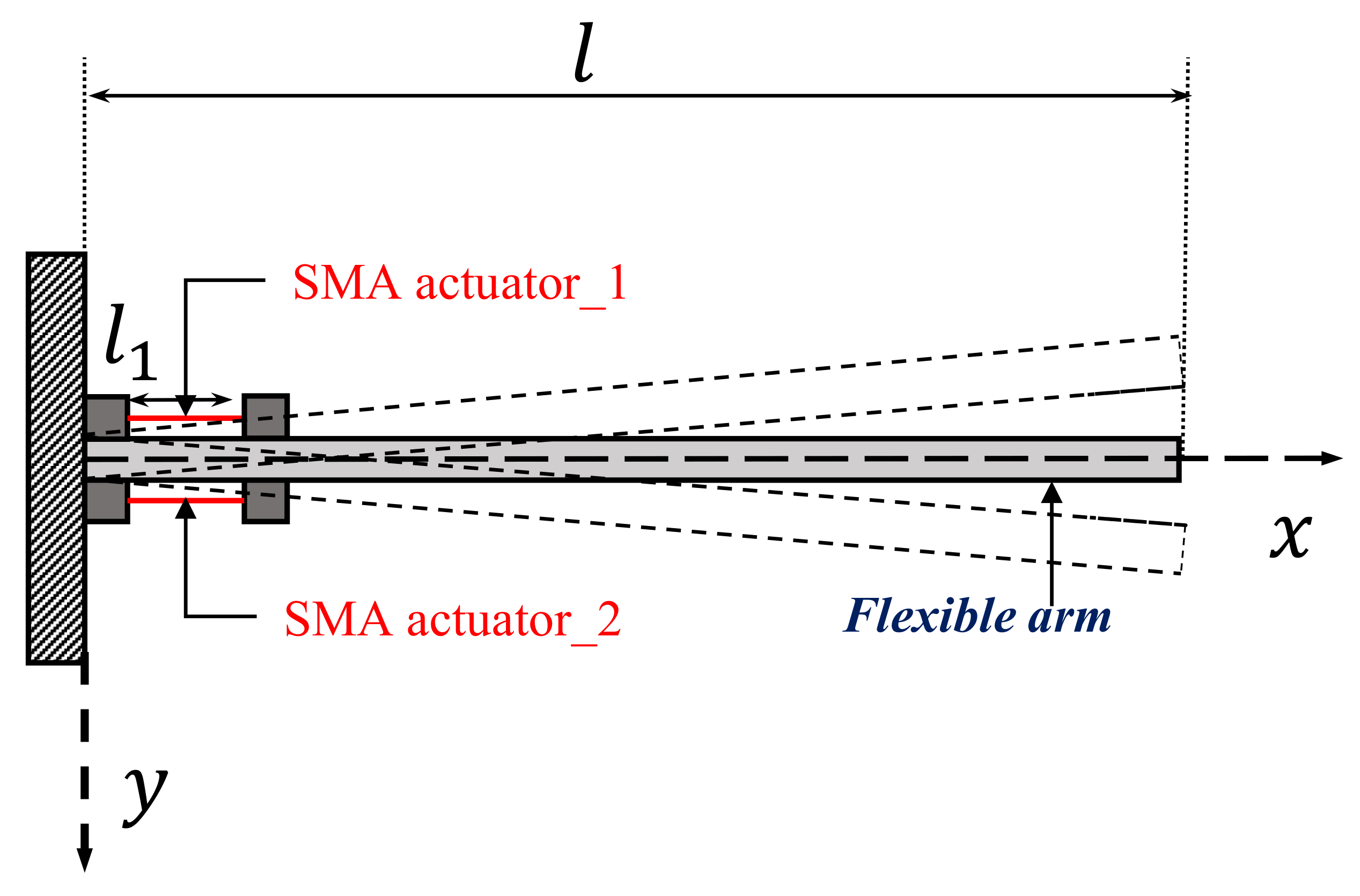
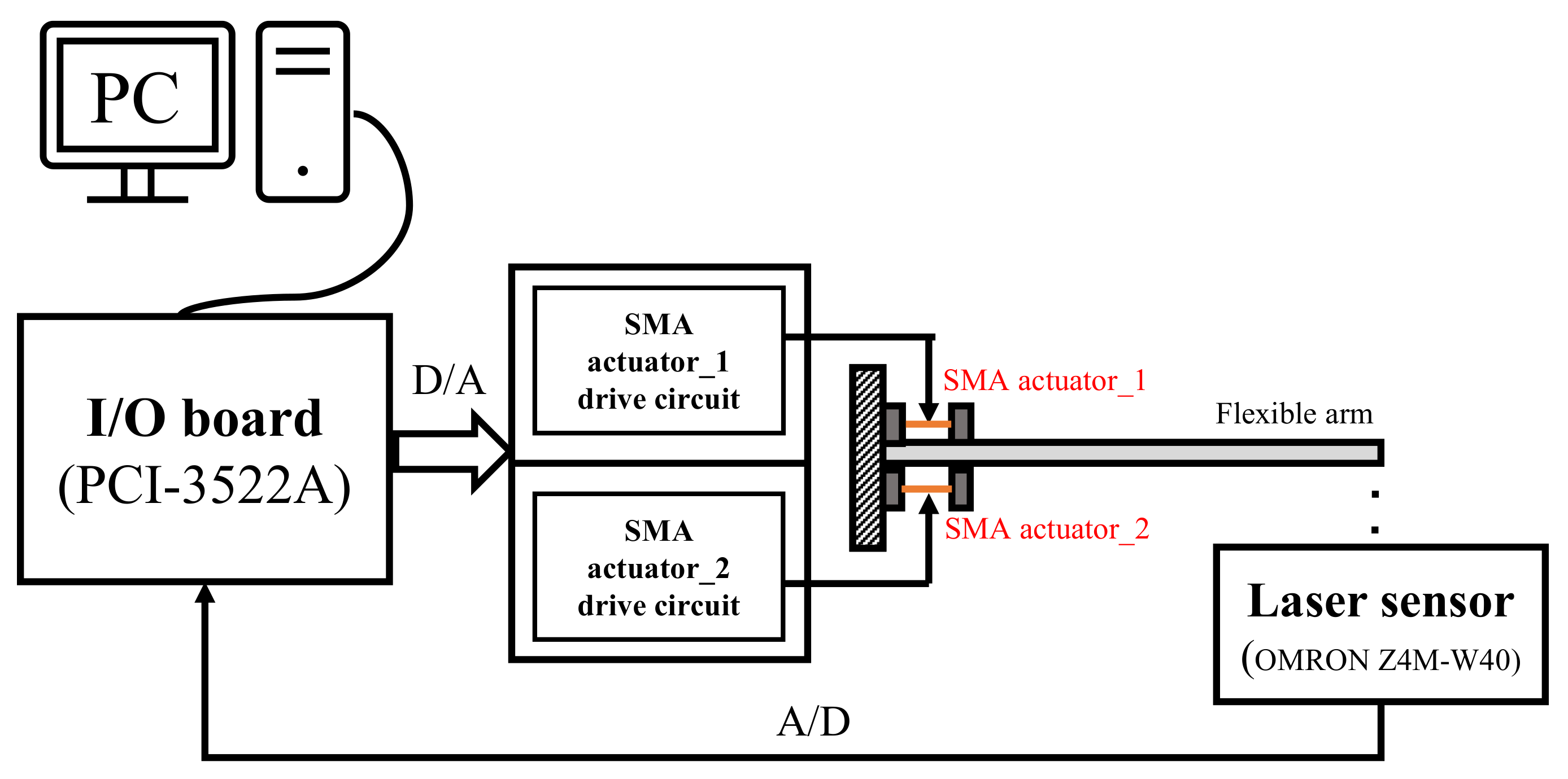
2.1. Experimental Setup
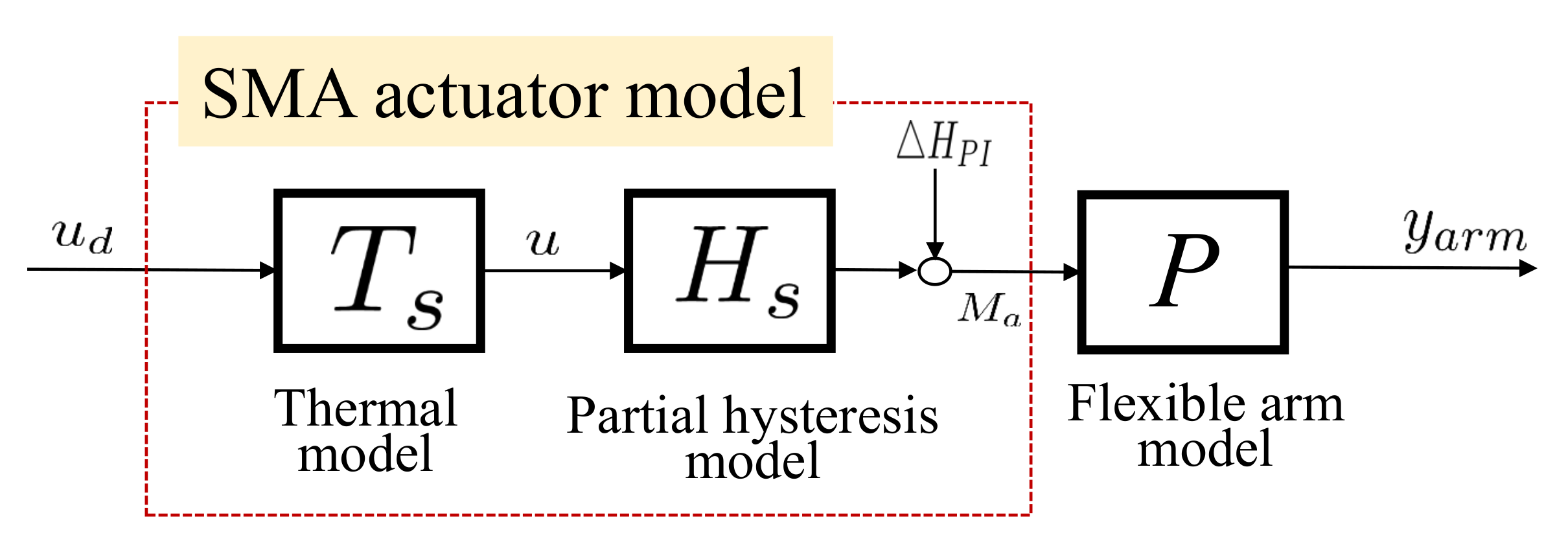
2.2. Interactive SMA Actuator’s Thermal Model
2.3. Interactive SMA Actuator’s Hysteresis Model
2.4. Modeling of the Flexible Arm
3. Proposed Interactive Actuation Vibration Control
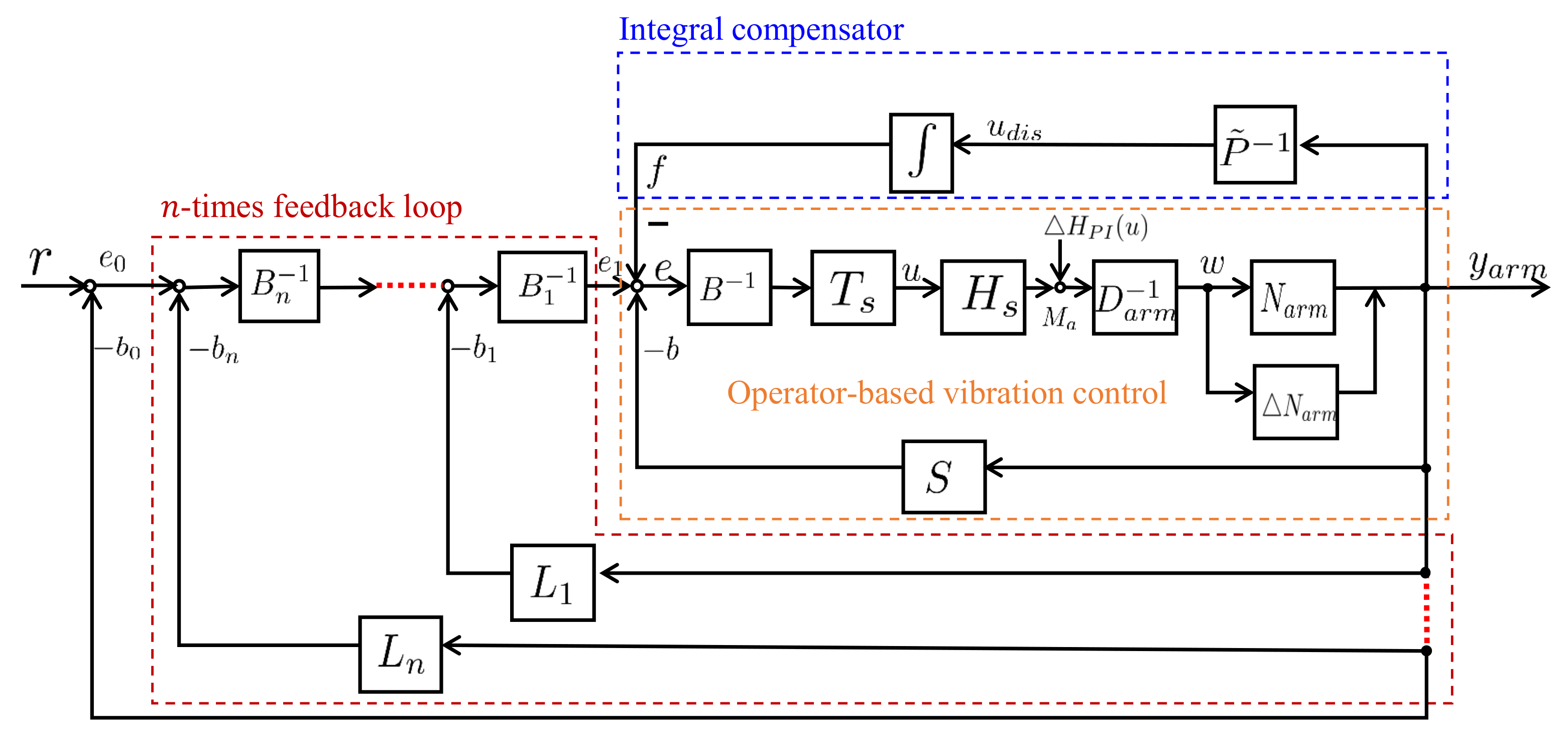
- Nonlinear vibration controller guarantees the robust stabilization by using robust right coprime factorization;
- The designed integral compensator reduces the displacement vibration of the flexible arm;
- n-times feedback loop can obtain the desired tracking performance.
3.1. Robust Nonlinear Vibration Controller
3.2. A Designed Integral Compensator
3.3. Tracking Performance of n-Times Feedback Loop
4. Results and Discussion
4.1. Experiment System
4.2. Experimental Results
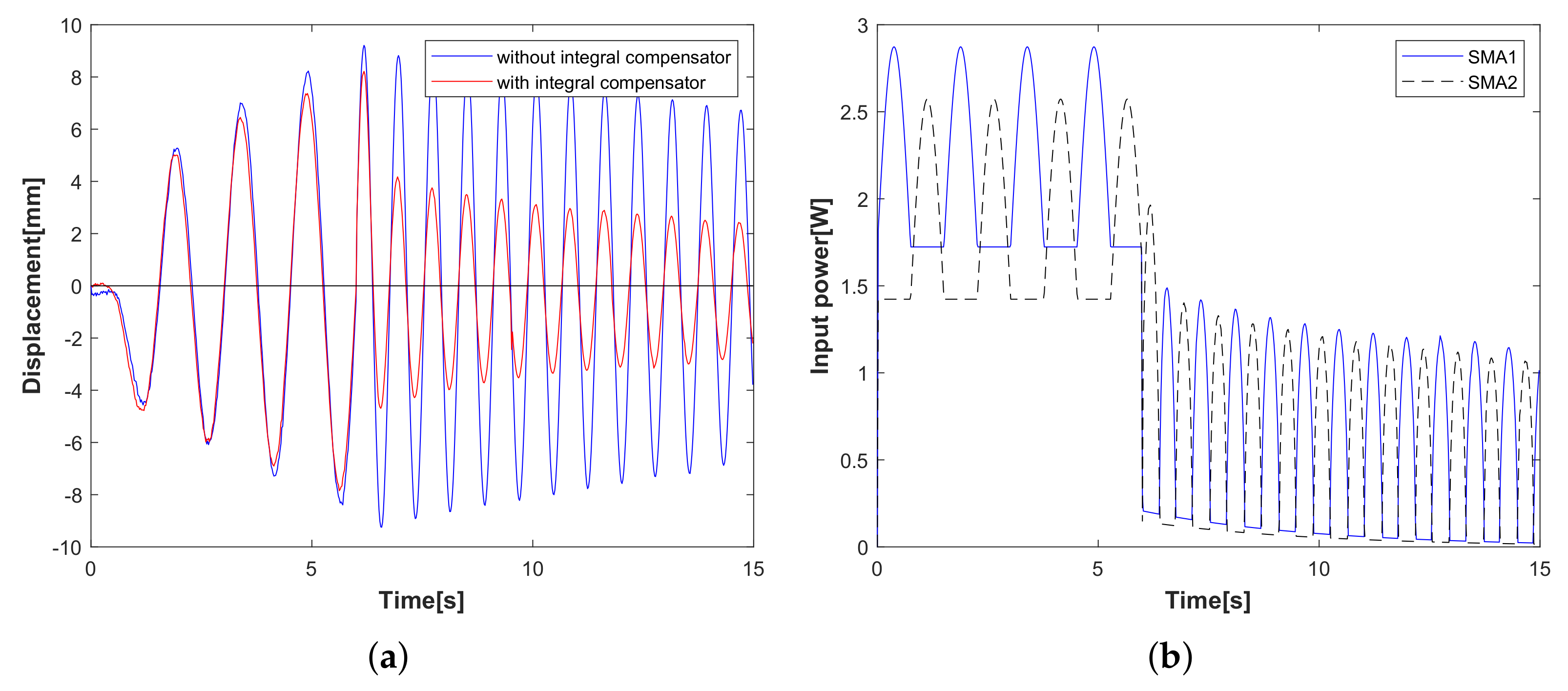
- Experimental case 1: operator-based vibration controller with/without the designed integral compensator. In Figure 6, the displacement of the flexible arm decreases after 5 s; the result is verified that the operator-based vibration controller provides robust stability. Compared with the displacement of the red line and the blue line, it is clear that the designed integral compensator as a red line can reduce the displacement vibration of the flexible arm shown in Figure 6a, and the input power to the SMA actuator is shown in Figure 6b. From experimental case 1, when the vibration controller is integrated with the designed integral compensator, the vibration displacement of the flexible arm is reduced by more than that without the integral compensator.
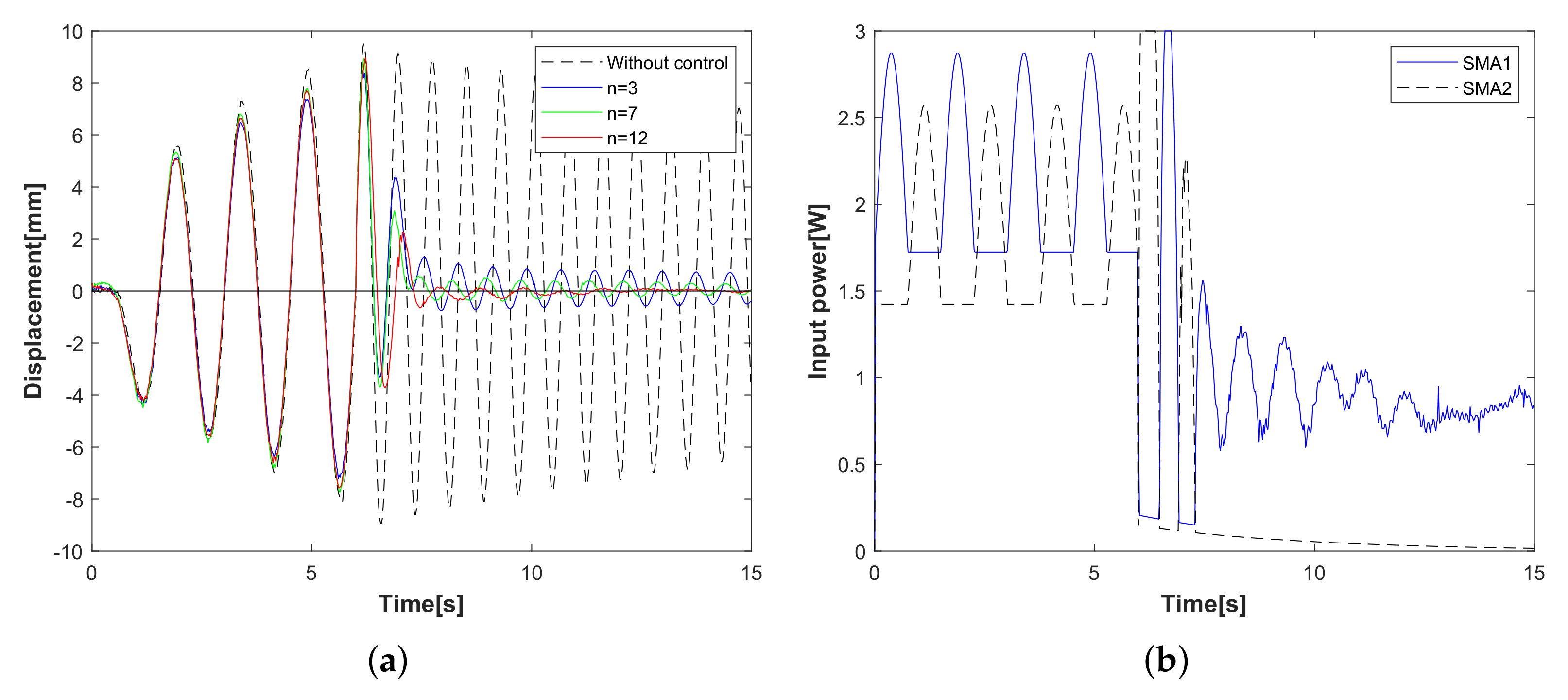
- Experimental case 2: the tracking performance of the n-times feedback loop. In Figure 7, the tracking performance of the n-times feedback loop with n = 3, 7, 12 is presented. The experimental results can confirm that the output performance of the n-times feedback loop is obviously stable within 8 s in Figure 7a and with lower input power (n = 12) in Figure 7b. While increasing the number of n, the vibration suppression has a fast response with less waveform, and the desired tracking performance is improved more effectively. From experimental case 2, compared to free vibration control, the displacement of the flexible arm is shown as a red line for the 12-times feedback loop and a green line for 7-times and a blue line for the 3-times feedback loop. The tracking performance is optimized by increasing the number of 3, 7, 12 times feedback loops.
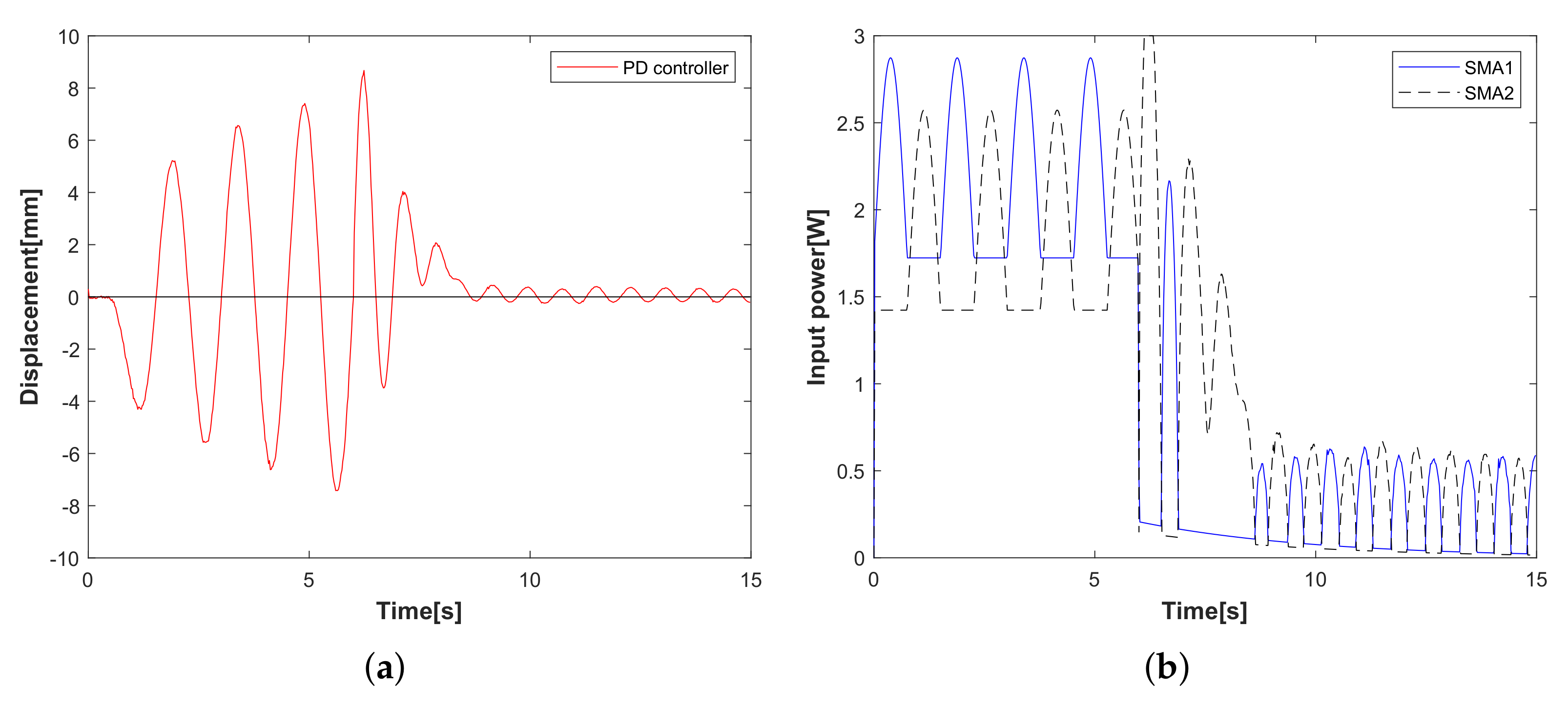
- Experimental case 3: vibration attenuation of the conventional PD controller. The designed parameters of PD controllers and are 600 and 150, respectively. In Figure 8, a conventional PD controller of the flexible arm is compared. Vibration attenuation of PD controller becomes stable beyond the 7th vibration waveforms in Figure 8a, while the input power in Figure 8b is higher than that of the proposed method in Figure 7b. From the experimental case 3, the conventional PD controller stabilizes the vibration displacement after the 7th vibration waveform, while the vibration displacement approaches zero after the 4th vibration waveform using the proposed vibration control method, which is proved to be faster and more effective in controlling the flexible arm’s vibration. This paper focuses on the qualitative analysis of the vibration control speed and input power magnitude.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bergerman, M.; Henten, E.; Billingsley, J.; Reid, J.; Deng, M. IEEE Robotics and Automation Society Technical Committee on Agricultural Robotics and Automation. IEEE Robot. Autom. Mag. 2013, 20, 20–23. [Google Scholar] [CrossRef]
- Deng, M.; Inoue, A.; Shibata, Y.; Sekiguchi, K.; Ueki, N. An obstacle avoidance method for two wheeled mobile robot. In Proceedings of the IEEE International Conference on Networking, Sensing and Control, London, UK, 15–17 April 2007; pp. 689–692. [Google Scholar]
- Deng, M.; Inoue, A.; Zhu, Q. An integrated study procedure on real-time estimation of time-varying multi-joint human arm viscoelasticity. Trans. Inst. Meas. Control 2011, 33, 919–941. [Google Scholar] [CrossRef]
- Wen, S.; Deng, M.; Inoue, A. Operator-based robust nonlinear control for gantry crane system with soft measurement of swing angle. Int. J. Model. Identif. Control 2012, 16, 86–96. [Google Scholar] [CrossRef]
- Katsurayama, Y.; Deng, M.; Jiang, C. Operator based experimental studies on nonlinear vibration control for an aircraft vertical tail with considering low order modes. Trans. Inst. Meas. Control 2016, 38, 1421–1433. [Google Scholar] [CrossRef]
- Vincke, B.; Ghaoui, M.A.; Férey, N.; Martinez, X. Physical, Modular and Articulated Interface for Interactive Molecular Manipulation. Sensors 2020, 20, 5415. [Google Scholar] [CrossRef] [PubMed]
- Qu, W.; Sun, J.; Qiu, Y. Active control of vibration using a fuzzy control method. J. Sound Vib. 2004, 275, 5079. [Google Scholar]
- Xie, P.; Che, Y.; Liu, Z.; Wang, G. Research on Vibration Reduction Performance of Electromagnetic Active Seat Suspension Based on Sliding Mode Control. Sensors 2022, 22, 5916. [Google Scholar] [CrossRef]
- Abhishek, S.; Chakraborty, S. The effect of an adaptive feedback-control system in the structural vibration control. J. Sound Vib. 2023, 548, 117501. [Google Scholar]
- Kusagur, S.M.; Arunkumar, G.; Manjunath, T.C. Modelling of smart intelligent materials with PZT and PVDF sensors/actuators to control the active vibrations of flexible aluminum mechanical cantilever beams using proportional integral derivative (PID) techniques. Mater. Today Proc. 2021, 37, 2075–2082. [Google Scholar] [CrossRef]
- Yuvaraja, M.; Senthilkumar, M. Comparative Study on Vibration Characteristics of a Flexible GFRP Composite Beam Using SMA and PZT Actuators. Procedia Eng. 2013, 64, 571–581. [Google Scholar] [CrossRef] [Green Version]
- Matsumori, H.; Deng, M.; Noge, Y. An operator-based nonlinear vibration control system using a flexible arm with shape memory alloy. Int. J. Autom. Comput. 2020, 17, 139–150. [Google Scholar] [CrossRef]
- Saito, S.; Deng, M.; Minami, M.; Jiang, C. Yanou, A. Operator-based vibration control system design of a flexible arm using an SMA actuator with hysteresis. SICE J. Control Meas. Syst. Integr. 2012, 5, 115–126. [Google Scholar] [CrossRef]
- Takahashi, K.; Deng, M. Nonlinear sensorless cooling control for a Peltier actuated aluminum plate thermal system. In Proceedings of the 2013 International Conference on Advanced Mechatronic Systems, Luoyang, China, 25–27 September 2013; pp. 1–6. [Google Scholar]
- Yan, T.; Xu, X.; Han, J.; Lin, R.; Ju, B.; Li, Q. Optimization of Sensing and Feedback Control for Vibration/Flutter of Rotating Disk by PZT Actuators via Air Coupled Pressure. Sensors 2011, 11, 3094–3116. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Irschik, H.; Krommer, M.; Vetyukov, Y. On the Use of Piezoelectric Sensors in Structural Mechanics: Some Novel Strategies. Sensors 2010, 10, 5626–5641. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hashemi, A.; Jang, J.; Hosseini-Hashemi, S. Smart Active Vibration Control System of a Rotary Structure Using Piezoelectric Materials. Sensors 2022, 22, 5691. [Google Scholar] [CrossRef] [PubMed]
- Pittaccio, S.; Viscuso, S. Shape Memory Actuators for Medical Rehabilitation and Neuroscience. In Smart Actuation and Sensing Systems—Recent Advances and Future Challenges; IntechOpen: London, UK, 2012. [Google Scholar]
- Ruth, D.J.S.; Sohn, J.-W.; Dhanalakshmi, K.; Choi, S.-B. Control Aspects of Shape Memory Alloys in Robotics Applications: A Review over the Last Decade. Sensors 2022, 22, 4860. [Google Scholar] [CrossRef]
- Senko, R.; Almeida, V.S.; dos Reis, R.P.B.; Oliveira, A.G.; Silva, A.A.; Rodrigues, M.C.; de Carvalho, L.H.; Lima, A.G.B. Passive Attenuation of Mechanical Vibrations with a Superelastic SMA Bending Springs: An Experimental Investigation. Sensors 2022, 22, 3195. [Google Scholar] [CrossRef]
- Riccio, A.; Napolitano, C.; Sellitto, A.; Acanfora, V.; Zarrelli, M. Development of a Combined Micro-Macro Mechanics Analytical Approach to Design Shape Memory Alloy Spring-Based Actuators and Its Experimental Validation. Sensors 2021, 21, 5506. [Google Scholar] [CrossRef] [PubMed]
- Terrile, S.; Miguelañez, J.; Barrientos, A. A Soft Haptic Glove Actuated with Shape Memory Alloy and Flexible Stretch Sensors. Sensors 2021, 21, 5278. [Google Scholar] [CrossRef]
- Srivastava, R.; Alsamhi, S.H.; Murray, N.; Devine, D. Shape Memory Alloy-Based Wearables: A Review, and Conceptual Frameworks on HCI and HRI in Industry 4.0. Sensors 2022, 22, 6802. [Google Scholar] [CrossRef]
- Kashiwagi, I.; Koide, T.; Deng, M.; Noge, Y. Operator based robust nonlinear vibration control of load-attached flexible arm actuated by single-sided SMA. In Proceedings of the 2019 International Conference on Advanced Mechatronic Systems (ICAMechS), Kusatsu, Japan, 26–28 August 2019; pp. 69–74. [Google Scholar]
- Janaideh, M.; Mao, J.; Rakheja, S.; Xie, W.; Su, C. Generalized Prandtl-Ishlinskii hysteresis model: Hysteresis modeling and its inverse for compensation in smart actuators. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 5182–5187. [Google Scholar]
- Rakotondrabe, M. Classical Prandtl-Ishlinskii modeling and inverse multiplicative structure to compensate hysteresis in piezoactuators. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 1646–1651. [Google Scholar]
- Wang, A.; Deng, M. Robust nonlinear multivariable tracking control design to a manipulator with unknown uncertainties using operator-based robust right coprime factorization. Trans. Inst. Meas. Control 2013, 35, 788–797. [Google Scholar] [CrossRef]
- Jin, G.; Deng, M. Operator-based robust nonlinear vibration control system for a flexible arm with double-sided SMA. In Proceedings of the 2022 12th International Conference on Power, Energy and Electrical Engineering (CPEEE), Shiga, Japan, 25–27 February 2022; pp. 366–370. [Google Scholar]
- Li, X.; Jin, G.; Deng, M. Double-Sided SMA Actuator for Operator-Based Nonlinear Vibration Control of a Flexible Arm. In Proceedings of the 2022 International Conference on Advanced Mechatronic Systems (ICAMechS), Tokyo, Japan, 17–20 December 2022; pp. 194–198. [Google Scholar]
- Araújo, J.M.; Bettega, J.; Dantas, N.J.B.; Dórea, C.E.T.; Richiedei, D.; Tamellin, I. Vibration Control of a Two-Link Flexible Robot Arm with Time Delay through the Robust Receptance Method. Appl. Sci. 2021, 11, 9907. [Google Scholar] [CrossRef]
- Hu, Y.; Ng, A. Active robust vibration control of flexible structures. J. Sound Vib. 2005, 288, 43–56. [Google Scholar] [CrossRef]
- Wu, H.; Deng, M. Robust adaptive control scheme for uncertain non-linear model reference adaptive control systems with time-varying delays. IET Control Theory A 2015, 9, 1181–1189. [Google Scholar] [CrossRef]
- Chen, X.; Su, C.; Fukuda, T. Robust vibration control for flexible arms using the sliding mode method. Asian J. Control 2003, 5, 594–604. [Google Scholar] [CrossRef]
- Deng, M.; Inoue, A.; Yanou, A.; Hirashima, Y. Continuous-time anti-windup generalized predictive control of non-minimum phase processes with input constraints. In Proceedings of the 42nd IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; pp. 4457–4462. [Google Scholar]
- Henmi, T.; Deng, M.; Inoue, A. Swing-up control of the acrobot using a new partial linearization controller based on the Lyapunov theorem. In Proceedings of the 2006 IEEE International Conference on Networking, Sensing and Control, Ft. Lauderdale, FL, USA, 23–25 April 2006; pp. 60–65. [Google Scholar]
- Jin, G.; Deng, M. Operator-based nonlinear free vibration control of a flexible plate with sudden perturbations. Trans. Inst. Meas. Control 2020, 42, 1375–1387. [Google Scholar]
- Deng, M.; Jiang, C.; Inoue, A. Operator-based robust control for nonlinear plants with uncertain non-symmetric backlash. Asian J. Control 2011, 13, 317–327. [Google Scholar] [CrossRef]
- Deng, M.; Jiang, C.; Inoue, A.; Su, C. Operator-based robust control for nonlinear systems with Prandtl–Ishlinskii hysteresis. Int. J. Syst. Sci. 2011, 42, 643–652. [Google Scholar] [CrossRef]
- Deng, M.; Inoue, A.; Ishikawa, K. Operator-based nonlinear feedback control design using robust right coprime factorization. IEEE Trans. Autom. Control 2006, 51, 645–648. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol [Unit] | Value |
|---|---|---|
| Length of SMA wire | 0.1 | |
| Diameter of SMA wire | d [m] | 1 × 10−4 |
| Resistance of SMA wire | R [Ω] | 13.5 |
| Heat transfer coefficient | 689 | |
| Surface area of SMA wire | 3.14 × 10−7 | |
| Mass of SMA wire | m [kg] | 5 × 10−6 |
| Length of the flexible arm | l [m] | 0.8 |
| Specific heat | 7349 | |
| Density | ρ [kg/m3] | 2700 |
| Cross-sectional area | S [m2] | 10 × 10−6 |
| Young’s modulus | E [N/m2] | 6.9 × 1010 |
| Area moment of inertia | I [m4] | 1.67 × 10−12 |
| 1st order damping mode) | C1 [s] | 0.0015 |
| Ambient temperature | Ta [°C] | 20 |
| Parameters | Symbol [Unit] | Value |
|---|---|---|
| Sampling time | [s] | 0.02 |
| Experiment time | [s] | 15 |
| Ambient temperature | Ta [°C] | 20 |
| Designed parameter | K1 [−] | 0.02 |
| Designed parameter | K2 [−] | 0.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Jin, G.; Deng, M. Nonlinear Vibration Control Experimental System Design of a Flexible Arm Using Interactive Actuations from Shape Memory Alloy. Sensors 2023, 23, 1133. https://doi.org/10.3390/s23031133
Li X, Jin G, Deng M. Nonlinear Vibration Control Experimental System Design of a Flexible Arm Using Interactive Actuations from Shape Memory Alloy. Sensors. 2023; 23(3):1133. https://doi.org/10.3390/s23031133
Chicago/Turabian StyleLi, Ximei, Guang Jin, and Mingcong Deng. 2023. "Nonlinear Vibration Control Experimental System Design of a Flexible Arm Using Interactive Actuations from Shape Memory Alloy" Sensors 23, no. 3: 1133. https://doi.org/10.3390/s23031133