1. Introduction
With the development of computer technology, researchers apply advanced artificial intelligence technology in the field of transportation, such as traffic sign detection in the field of road traffic [
1,
2], railway surface [
3,
4,
5,
6] and fastener [
7,
8] defect detection in the field of rail transit. With the rapid development of urban rail transit, the subway system has become the preferred mode of public transportation, which undoubtedly raises higher requirements for the safety of trains. However, there is limited research on subway driver action sensoring and detection based on surveillance cameras. Subway drivers play a crucial role in the safe operation of trains. They need to confirm each step to ensure that no step is missed. The actions of drivers indicate that the current equipment is normally operating. Currently, the monitoring of driver actions is mainly carried out by two surveillance cameras installed in the driver cab. The manual inspection of surveillance videos is used to determine whether the driver has performed the corresponding actions. This method is both inefficient and costly. Therefore, it is of great significance to conduct research on the action sensoring and detection of subway drivers based on surveillance cameras to realize the real-time automatic detection of driver action categories. It can help reduce costs, enhance the operational safety of trains, and improve the intelligence level of urban rail transit monitoring systems.
Subway driver action sensoring and detection (SDASD) belongs to spatial–temporal action detection (STAD), which aims to detect the spatial positions of individuals in the current frame and determine their action categories. In the past, complex handcrafted features have been used, such as spatial–temporal interest points, motion trajectories, etc., for video action recognition [
9,
10,
11,
12,
13]. These methods achieved good results for simple actions. However, due to the complexity of designing and computing handcrafted features, these methods suffer from slow recognition speed and are not suitable for practical applications.
In recent years, with the rapid development of deep learning, scholars have started to utilize deep neural networks for STAD, which can be categorized into two-stage methods and one-stage methods. The mainstream approach is the two-stage method, where the first stage uses pre-trained object detectors [
14,
15,
16] to generate human region proposals in the current frame. In the second stage, an action recognition network, often utilizing 3D CNNs to extract spatial–temporal features from video clips, is used for action recognition [
17]. Gu et al. [
18] introduce an AVA dataset and propose a STAD approach. The region proposal network adopts ResNet50, and the action recognition network uses the I3D network [
19], which integrates RGB and optical flow, and finally performs action classification. Subsequently, several models are proposed to improve the performance of STAD, such as ACRN (Actor-Centric Relation Network) [
20], STEP (Spatio-TEmporal Progressive) [
21], LFB (Long-term Feature Banks) [
22], SlowFast [
23], Context-Aware RCNN [
24], ACARN (Actor–Context–Actor Relation Network) [
25] and so on. These two-stage models achieve high accuracy, but the human region detection and action recognition are independent, making these models inefficient. In recent studies, several one-stage models are proposed, where a single network is used for both human region detection and action recognition. These models include WOO (Watch Only Once) [
26], SE-STAD (Simple and Efficient Spatial–Temporal Action Detector) [
27], and DOAD (Decoupled one-stage action detection network) [
28]. However, one-stage models face challenges, such as unsatisfied precision. Deep learning-based algorithms have significantly improved the accuracy of STAD, but the deep convolution network models often have a large number of parameters and computation cost, leading to a slow detection speed that does not meet the real-time detection requirements.
To enable deep neural networks to run on devices with limited computational resources, some lightweight networks have been proposed, such as MobileNet [
29,
30,
31] and ShuffleNet [
32,
33]. ShuffleNetV2 [
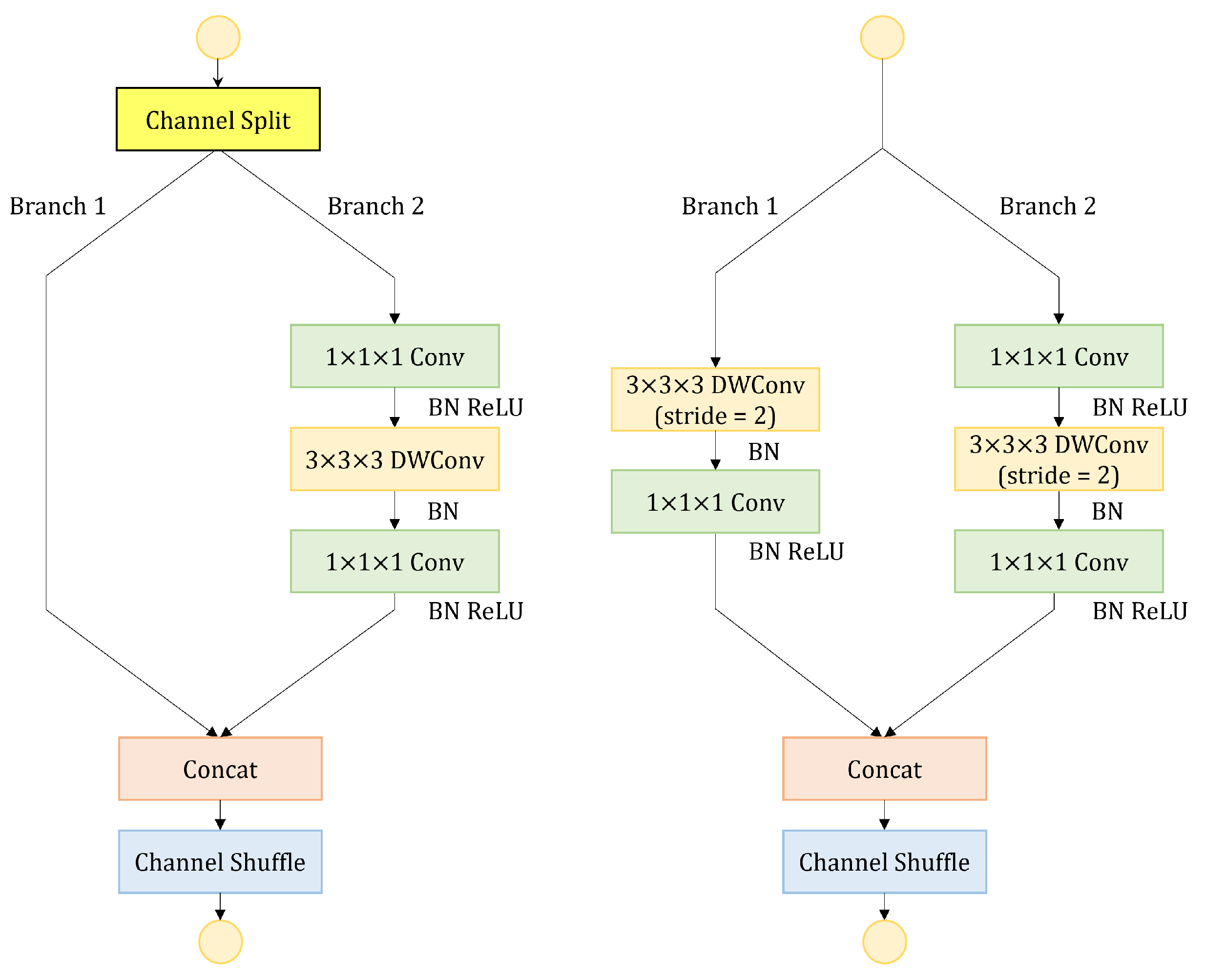
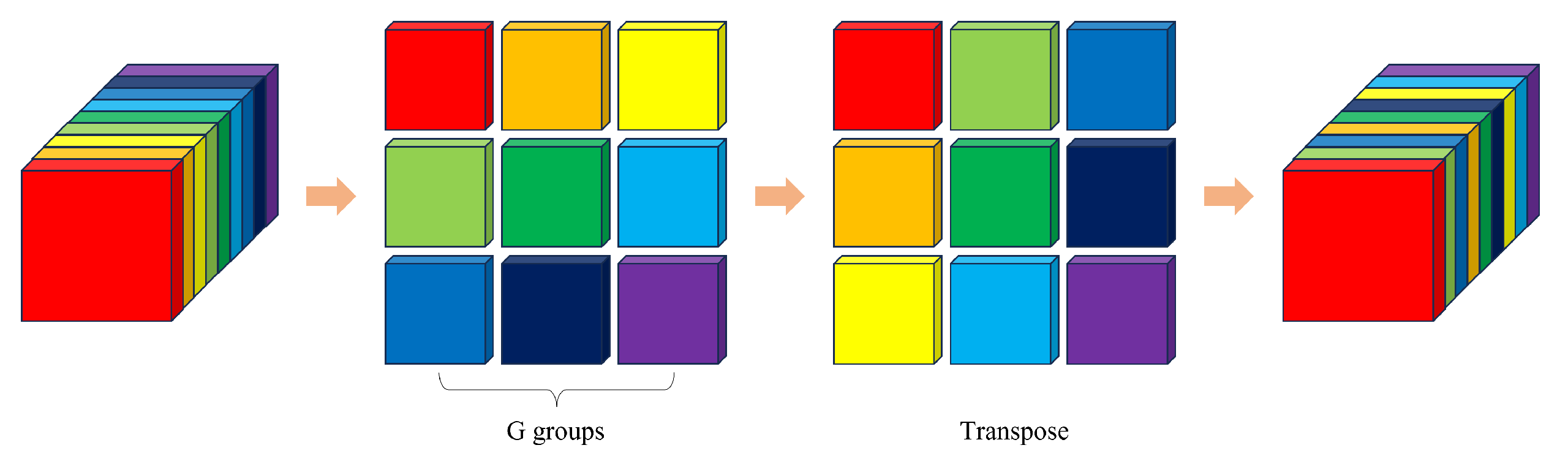
33] reduces the number of parameters and model size significantly by introducing depthwise separable convolutions. It incorporates channel split and channel shuffle to facilitate information exchange between channels. ShuffleNetV2 [
33] strikes a good balance between speed and precision.
As of now, there are no reported studies specifically focusing on SDASD based on surveillance cameras. Some researchers have conducted studies on driver action recognition. For instance, Hu et al. [
34] propose the RepC3D model, which combines C3D [
35] and RepVGG [
36] for recognizing subway driver actions. Suo et al. [
37] introduce an improved dense trajectory algorithm for driver action recognition. These studies primarily focus on video-level action recognition, where video clips are used for action classification, without explicitly detecting the region of drivers. Different from the above works, our main objective is to apply advanced artificial intelligence technology in the field of subway driver action detection, which is less relevant research work at present. We propose appropriate improvements on the basis of the existing model to further improve the detection performance. And then based on the improved model, we build a real-time driver action detection system to realize real-time video reading from the surveillance camera to carry out action detection, which makes it possible to deploy the system in the subway cab in the future.
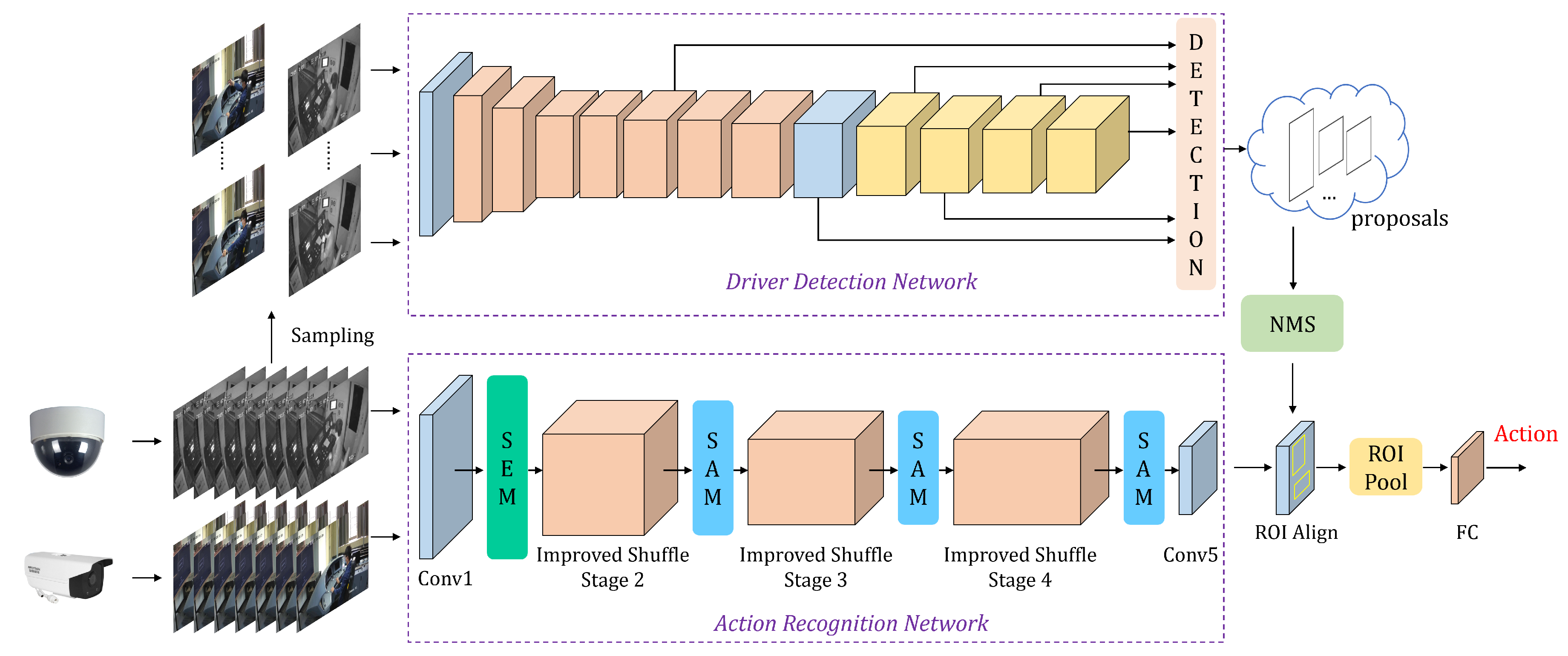
This paper aims to achieve real-time sensing of the region of the subway driver and recognition of their action category based on surveillance cameras. For this purpose, a two-stage model for subway driver action sensoring and detection is proposed. In the first stage, the region of the driver is localized by employing a pre-trained lightweight network called MobileNetV2-SSDLite. The network generates driver candidate region proposals along with confidence scores, which are used for subsequent action recognition. In the second stage, an improved ShuffleNetV2 is proposed to extract the spatial–temporal features of the video clips and recognize the category of actions. To boost the performance of network, a spatial enhanced module is introduced to compensate for spatial information loss caused by downsampling. A new branch with larger convolutional kernels is added to expand the receptive field of the network and a shuffle attention module is used to help the network focus the attention on important channels and spatial positions. Experimental results show that the proposed model outperforms other models, achieving a mAP of 72.44%, 4.87% higher than the baseline. Furthermore, a subway driver action sensoring and detection system based on surveillance cameras is built, which performs real-time action detection directly by reading video from surveillance cameras. It is composed of a video-reading module, main operation module and result-displaying module. The performance of the system shows that it meets the requirements for real-time detection. The main contributions are summarized as follows:
- 1.
A real-time subway driver action sensoring and detection model is proposed, which consists of a driver detection network and an action recognition network. The driver detection network is used to locate the region of the driver in the images, and the action recognition network is employed to recognize the category of the action.
- 2.
A spatial enhanced module is introduced after the first convolution downsampling layer, compensating for the loss of spatial information and enhancing the spatial positions of the feature map. In addition, a dataset specifically for subway driver action sensoring and detection is constructed.
- 3.
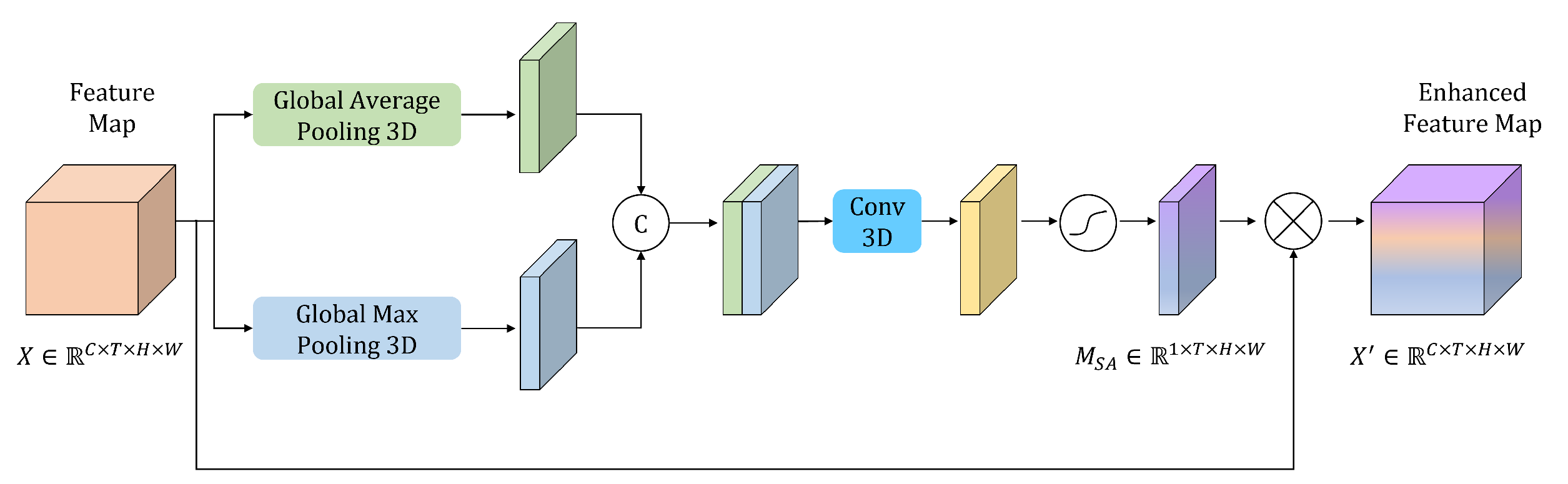
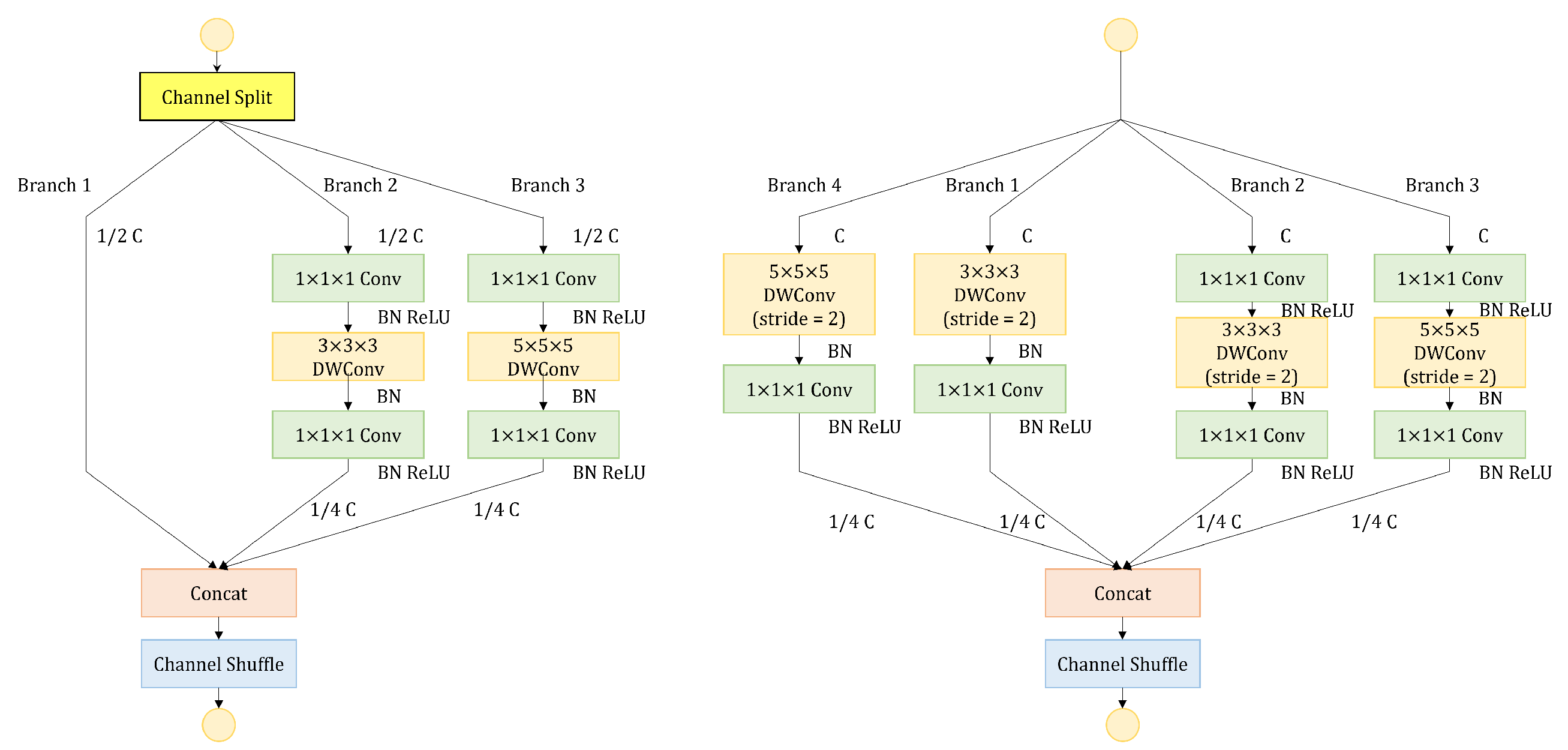
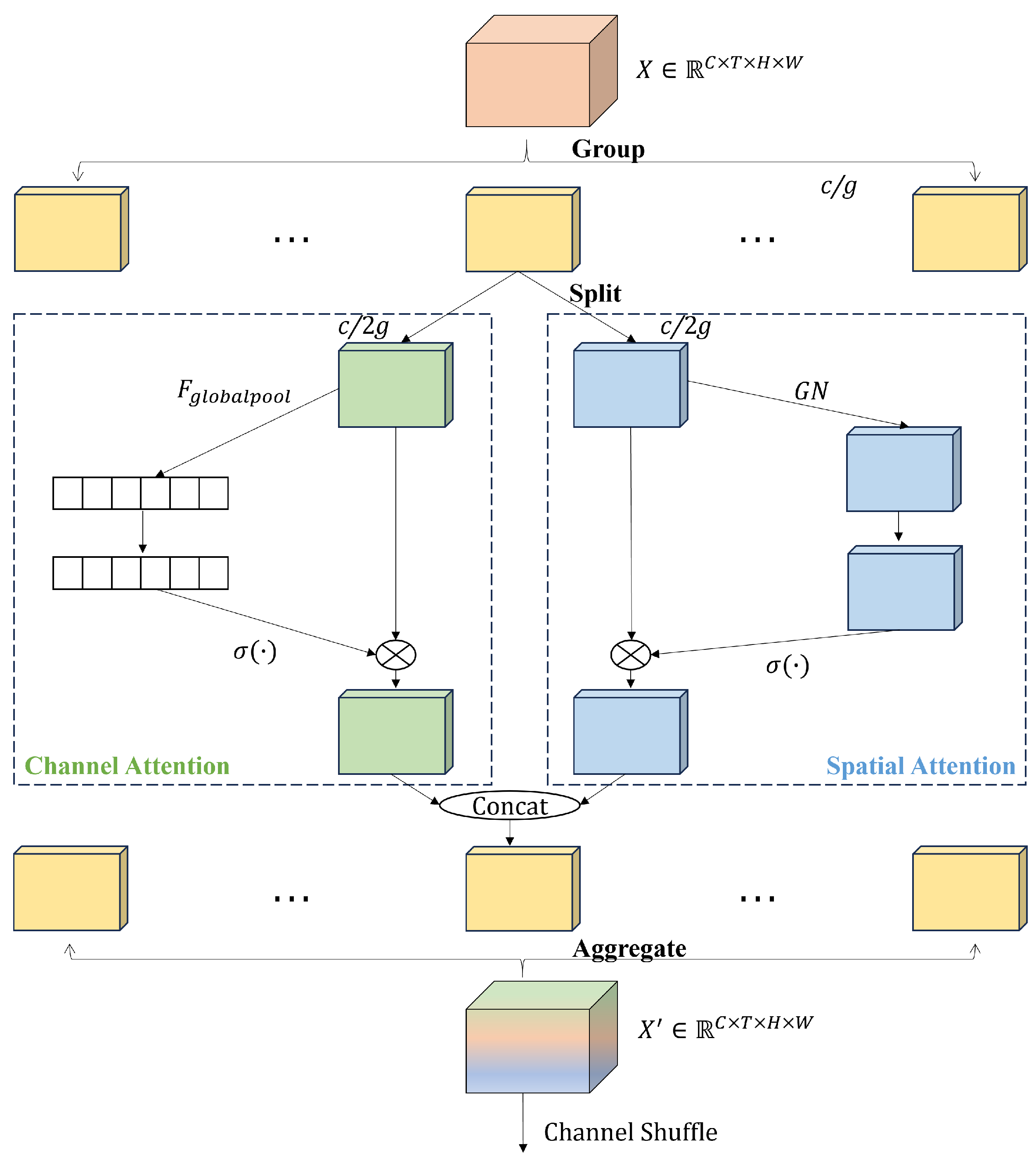
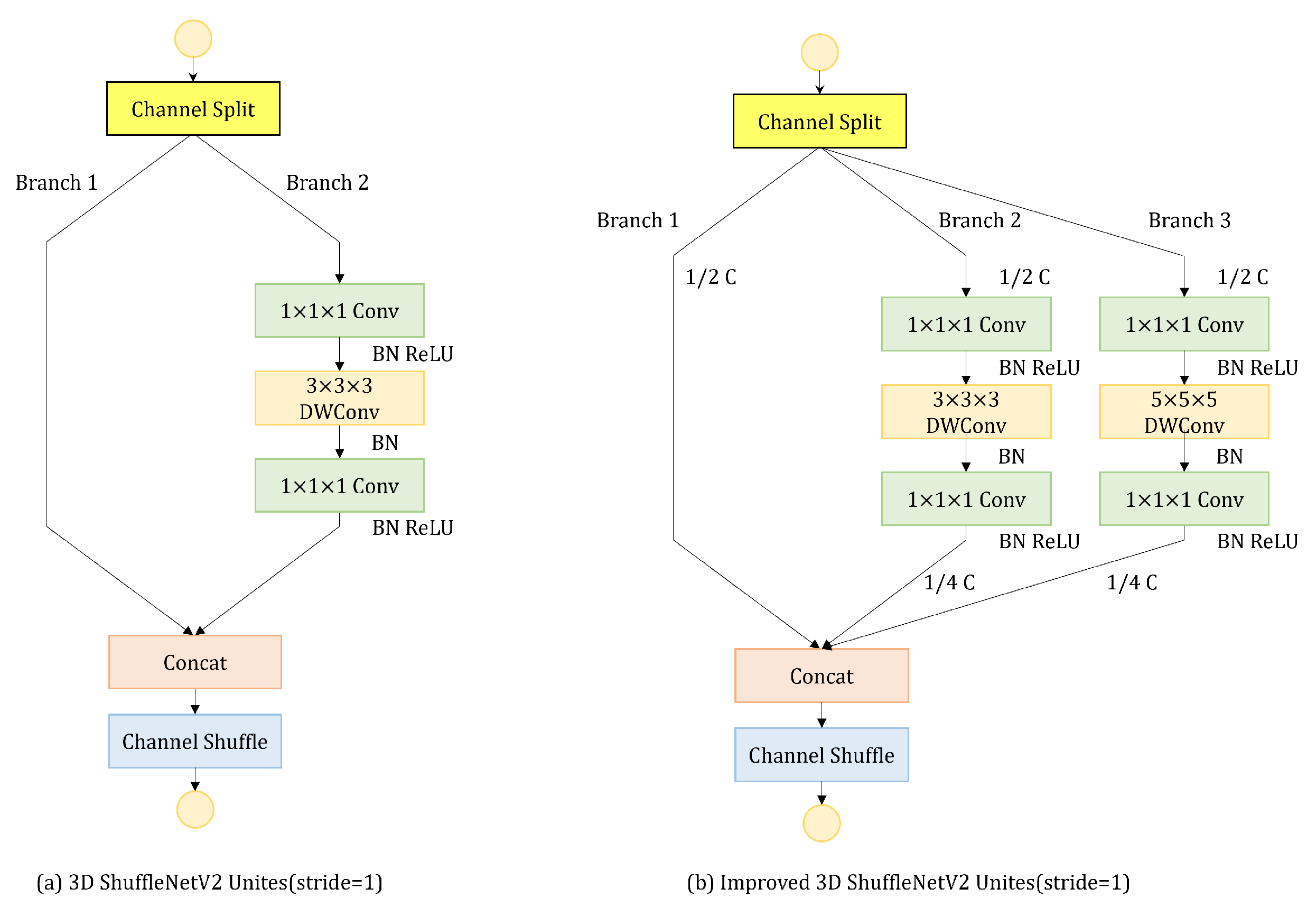
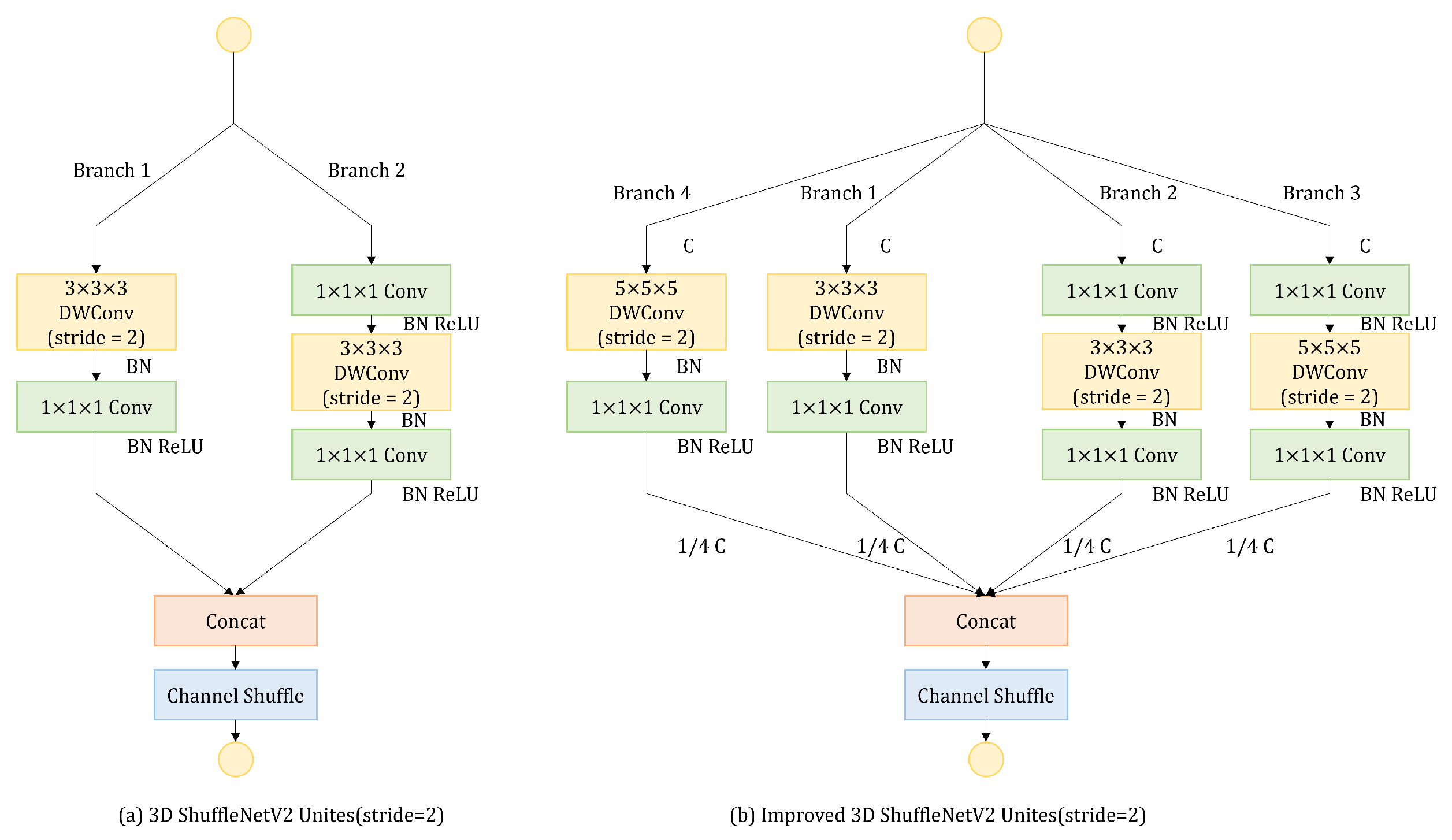
A new branch with a large convolutional kernel in the shuffle units is proposed to expand the receptive field, which is crucial for the subsequent action recognition. In addition, the shuffle attention module is introduced to help the network focus the attention on important channels and spatial positions.
- 4.
A real-time subway driver action sensoring and detection system based on surveillance cameras is built, which reads video from surveillance cameras and performs SDASD directly. According to the runtime analysis, the system meets the requirements for real-time detection.
The rest of this paper is organized as follows.
Section 2 introduces the problems studied in this paper. In
Section 3, a lightweight two-stage model for subway driver action sensoring and detection is proposed.
Section 4 introduces the detailed experiments and results. In
Section 5, a subway driver action sensoring and detection system is introduced.
Section 6 summarizes the conclusions and presents an outlook for future work.
2. Problem Statements
Subway drivers play a crucial role in ensuring the safe operation of urban rail transit. They need to confirm each step with their fingers to ensure that no step is missed. The actions of the driver can be used to determine whether the equipment is normally operating or not. Currently, the monitoring of driver actions and their states is primarily performed through the installation of two surveillance cameras in the driver cab (one located at the bottom left corner and the other at the top right corner). The action monitoring uses manual inspection of the recorded videos to check the actions of driver. This manual approach is inefficient and costly.
With the trend of intelligent development in urban rail transit, more and more advanced artificial intelligence algorithms are being applied to detection tasks. However, there is limited research on monitoring subway driver actions. Existing studies mostly focus on classifying driver actions from 2D images, namely recognizing the action category in a single image. Such methods can only identify simple actions without temporal relationships and do not achieve comprehensive action recognition. An action is often composed of multiple consecutive frames with temporal dependencies, and relying on a single image is insufficient for recognizing actions with temporal relationships. Suo et al. [
37] study subway driver action recognition by video clips from the perspective of the video level. The actions can be categorized as arrival confirmation, departure confirmation, interval confirmation, platform closing confirmation, and no action. An improved dense trajectory-based method has been proposed for recognizing driver gesture actions. While this method achieves high accuracy, it suffers from slow speed and is used for pre-cropped action video clips; thus, it cannot provide the real-time localization of the driver region and the recognition of driver actions.
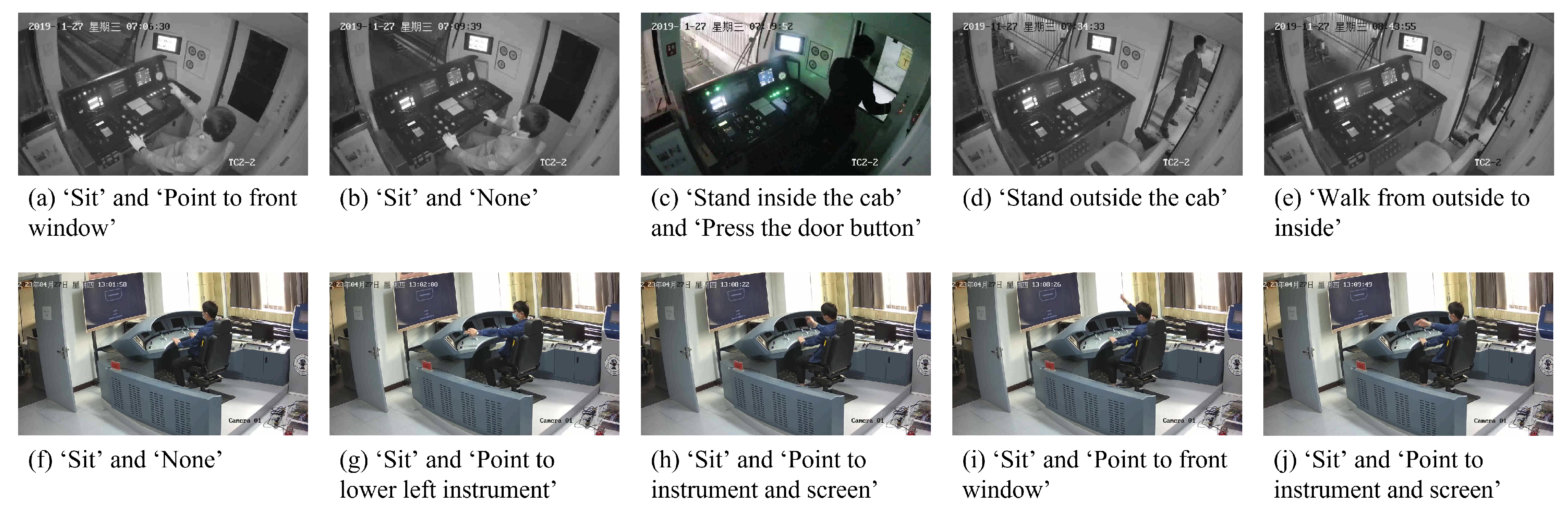
In this paper, the action sensoring and detection of subway drivers based on surveillance cameras is studied, aiming to sense the region of the driver and recognize their current actions from surveillance videos. According to surveillance videos in subway driver cabs, driver actions and states are categorized into 11 classes as shown in
Figure 1, including sitting (Sit), standing inside the cab (StinCab), standing outside the cab (StoutCab), walking from inside to outside (WafrI2O), walking from outside to inside (WafrO2I), pointing to the instrument and screen (Po2InSc), pointing to the front window (Po2FrWin), pointing to the lower left instrument (Po2LLin), pressing the door button (PrDoBu), pushing the instrument (PuIn), and no action (None). For the task of driver region localization, the lightweight object detection algorithm MobileNetv2-SSDLite is employed to locate the region of the driver in the image, and the coordinates and confidence scores are obtained. These coordinates and scores are used as regions of interest (ROIs) and fed to the action recognition network. For driver action recognition, an improved lightweight ShuffleNetv2 is proposed to extract spatial–temporal features from multiple frames of input. The ROIs from the driver region localization task are mapped onto the final feature map, followed by ROI pooling to generate fixed-size features for ROIs, and then processed through fully connected layers for action recognition. To evaluate the real-time performance of the proposed model, a subway driver action sensoring and detection system based on surveillance cameras is built, consisting of three parts: video-reading module, main operation module, and result-displaying module. The video-reading module stores the video streams in a reading queue, the main operation module samples frames from the queue and performs driver region localization and driver action recognition on the sampled frames, and the result-displaying module renders the results on the frames and composes the video for display on the screen. A surveillance camera is installed, and the system can perform action sensoring and detection on the video streams from the surveillance camera. According to the runtime of each module, the system achieves real-time detection.
4. Experiments
4.1. Dataset Preparation
The videos of the driver cab used in the experiment are from Beijing Metro Line 9, with a video resolution of 1280 × 720. The simulation video is recorded by the surveillance camera installed in the lab, with a video resolution of 1920 × 1080. Each raw surveillance video is about an hour long, and if it is fed directly into the model, it requires a huge amount of memory and computing resources. Therefore, in order to better sense and detect the category of the subway driver action, 328 video clips are cropped with a duration of 10 s from the original driver cab videos and simulation videos, of which 163 clips are from the actual surveillance video and 165 clips are from laboratory simulation videos. Each clip contains two action labels. The action labels includes sitting (Sit), standing inside the cab (StinCab), standing outside the cab (StoutCab), walking from inside to outside (WafrI2O), walking from outside to inside (WafrO2I), pointing to the instrument and screen (Po2InSc), pointing to the front window (Po2FrWin), pointing to the lower left instrument (Po2LLin), pressing the door button (PrDoBu), pushing the instrument (PuIn), and no action (None). The number of labeled actions is shown in
Table 2. The driver detection network does not require additional datasets. As the proposed model works, the frames for the driver detection network are sampled from the input video clip and no additional datasets are required.
The annotation method refers to the AVA dataset format [
18]. First, the video is extracted into a series of frames with an FPS of 30. The AVA dataset format does not label all frames but annotates 1 frame per second. Therefore, in the spatial–temporal detection dataset of the subway driver action, the first frame per second is annotated [
40]. Since the first and last 2 s of the videos are not involved in detecting, only images with indexes of 61, 91, 121, 151, 181, 211, 241 are labeled for each video clip with a duration of 10 s. In order to quickly label the region of the driver, the pre-trained YOLOv5 [
41] is used to detect the region of the driver, and the coordinates and confidence scores of the proposals are obtained as rough labeling, and then the rough labeling is imported into the VIA [
42] labeling tool for action category labeling. The annotation process is shown in
Figure 8.
The detailed process by which MobileNetV2-SSDLite results are used by improved shuffleNetV2 to drive the action classification task is as follows.
Taking a cropped video clip for example, the first and last 2 s of the videos are not involved in detecting (AVA dataset format), and the index of 61, 91, 121, 151, 181, 211, and 241 frames are labeled. Therefore, taking these seven frames as the center, and sampling eight frames each, we can obtain seven clips for the model training, where each clip has eight frames.
Taking the frame with index 61 as an example, with 61 as the center and an interval of 8, a total of 8 frames are sampled, that is, the index corresponding to the sampled frames is (29, 37, 45, 53, 61, 69, 77, 85), and the action label is the same as the label of the frame with index 61. For the driver detection network, these eight frames are input in sequence to obtain the driver proposals (namely anchors) in the eight frames. Then, the non-maximum suppression (NMS) is then used to filter invalid anchors that exceed a fixed threshold. The retained anchors after NMS are then mapped on the feature map of the last convolution layer of the improved ShuffleNetV2 (namely the output feature map of conv5, as shown in
Figure 1). For the action recognition network, these eight frames are taken as an input. The region of the driver on the feature map, namely the region of interest (ROI), can be obtained, and then the ROIs which have different sizes are transformed into fixed sizes by ROI pooling, and finally the fixed size features are sent to the fully connected layer for action classification.
4.2. Evaluation Indicators and Experimental Details
The purpose of subway driver action sensoring and detection is to sense and locate the region of the driver and recognize the category of the action, paying more attention to driver action recognition. A common evaluation indicator is mAP (mean Average Precision), which is the average of AP in all action categories.
In this paper, all the models are implemented by PyTorch and trained on 1 NVIDIA A6000 GPU. The CPU is Inter(R) Xeon(R) silver 4314 @2.4 GHz.
The input of the model is eight frames, which are sampled at equal intervals. The interval in this paper is set to eight, that is, one frame is sampled every eight frames. When model training, eight images are scaled to 256 × 256 after sampling, and horizontal flip is introduced to augment the dataset. For model testing, the height of the image is scaled to 256, and the width is scaled proportionally. The parameters are set as follows: the optimizer is SGD, the initial learning rate is 0.01, the weight momentum is 0.00003, and the learning rate decay strategy is cosine annealing, where warmup_iters is 500, warmup_ratio is 0.1, the minimum learning rate is 0.00001, and the training epoch is 200.
4.3. Experimental Results
For the driver detection network, the Intersection over Union (IoU) threshold is set to 0.5. For the action recognition network, the prediction score threshold is set to 0.9. The experimental results are shown in
Table 3. The baseline is the original 3D ShuffleNetV2 [
33]. As can be seen from
Table 3, SEM, ISU, and SAM can improve the performance of the model. ISU brings the most obvious gain; the mAP can increase 4.13%, and the number of parameters is smaller than the baseline. When all modules are added to the network, the mAP increases to 72.44%, 4.87% higher than the baseline.
Table 4 shows the AP of each action. It can be seen that the introduction of SEM, ISU and SAM improve the AP of most action categories, among which walking from inside to outside has the most obvious improvement, from 0.5143 to 0.8309, improved by 31.66%, followed by pressing the door button, which increases from 0.2172 to 0.3276, an improvement of 11.04%. Though the AP of walking from outside to inside, pointing to the instrument and screen, and pushing the instrument decrease slightly, other categories of actions have different amplitudes of increment. It can be concluded that the introduction of SEM, ISU and SAM improve the performance of the model. In addition, it is seen that the AP of pressing the door button action is low, owing to the small number of action instances in the actual surveillance video, and this action is not simulated due to the constraints of the operation console, which further leads to a smaller number of actions than other actions, resulting in the model not learning the feature of action well.
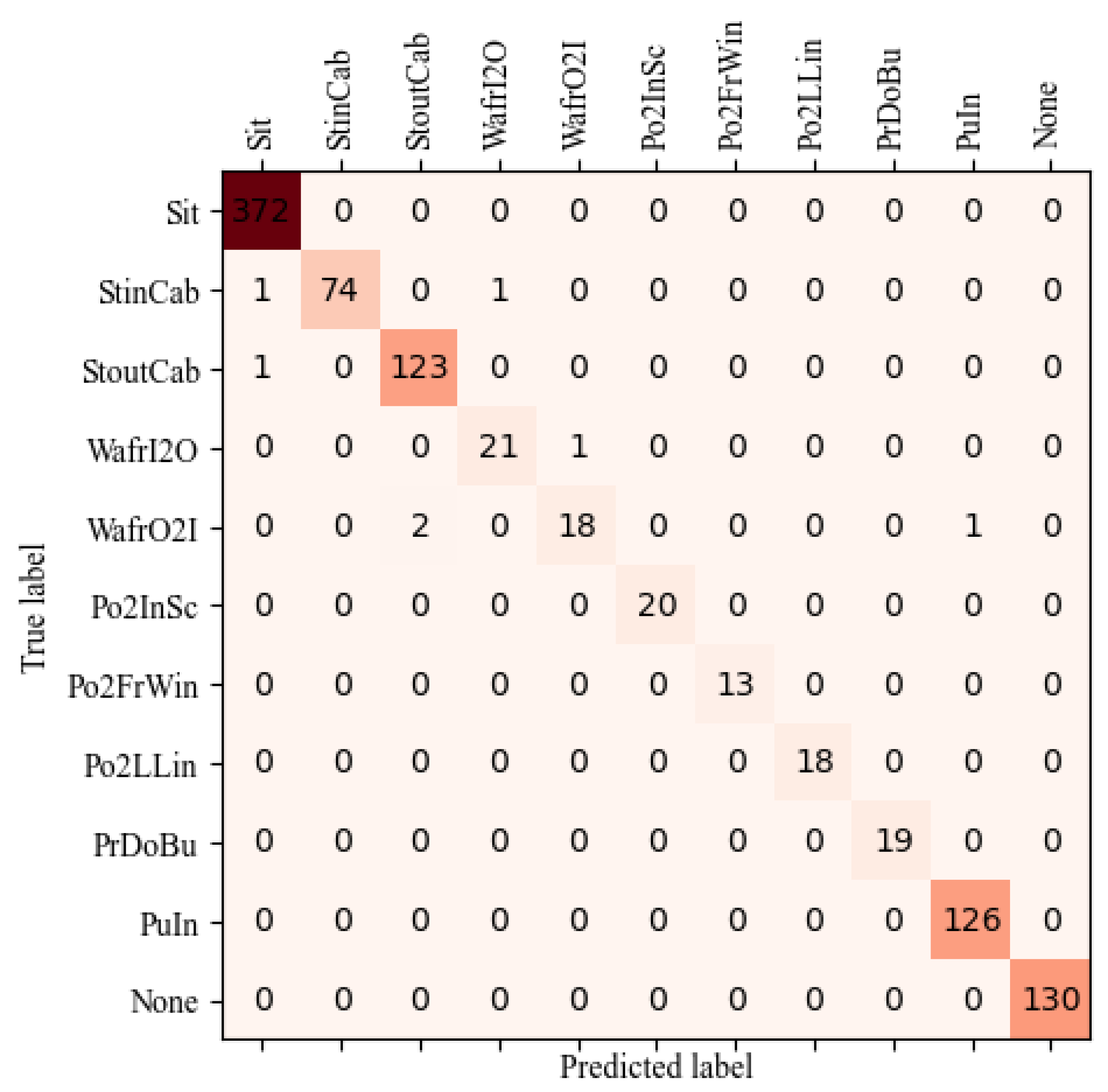
Figure 9 shows the confusion matrix for the recognition results of the proposed model. The action recognition network can almost accurately classify all kinds of actions; only seven actions are classified incorrectly. Of these seven actions, one StinCab and one StoutCab are classified as Sit because the driver is close to the seat in the two video clips, leading to the wrong classification. One StinCab is classified as WafrI2O because the StinCab occurs at the junction where the two actions occur, resulting in a classification error. Two WafrO2I are classified as StoutCab because these actions are both outside the cab and the action after StoutCab is WafrO2I. One WafrI2O is classified as WafrO2I because at the door, WafrI2O is similar to WafrO2I. One WafrO2I is classified as PuIn because in the real cab video, the action behind WaFrO2I is PuIn, resulting in a recognition error at the action connection. Overall, it can be seen that the proposed model can well recognize the action categories of the driver.
In order to prove that the SAM module is better than the SE module, we carried out a comparative experiment.
Table 5 shows the comparison results. It can see that the SAM has fewer parameters and better performance than the SE module.
In order to evaluate the performance of the proposed network, 3D MobileNetV1 [
29], 3D MobileNetV3 [
31], SlowFast-R50 [
23], SlowOnly-R50 [
23], and SE-STAD [
27] are selected for comparison. The experimental results are shown in
Table 6. The results show that the proposed network has a higher mAP and a smaller number of parameters and model size than the compared networks.
Table 7 shows the AP of each action. It can be seen that the APs of the proposed model are better than the compared models in most action categories, and the proposed network reaches the state of the art.
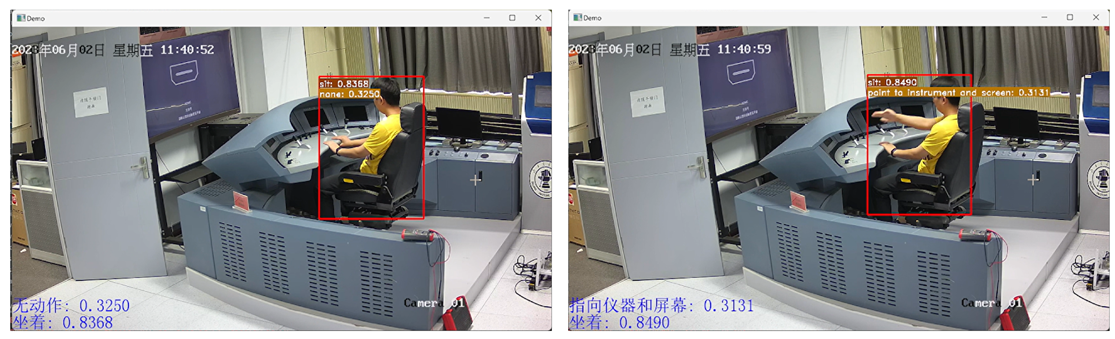
Figure 10 shows the driver action detection results from the actual surveillance video in the driver cab. It can be seen that the model can precisely locate the region of the driver and recognize the category of action.
6. Conclusions
In this paper, a lightweight two-stage model for subway driver action sensoring and detection based on surveillance cameras is proposed. It consists of the driver detection network and the action recognition network. The driver detection network adopts MobileNetV2-SSDLite, with the purpose of locating the region of the driver. The action recognition network employs the improved ShuffleNetV2 to extract spatial–temporal features and recognizes the category of action. The proposed network has a smaller number of parameters and model size than the compared networks. The experimental results show that the proposed network outperforms the compared networks, with a mAP of 72.44%, 4.87% higher than the baseline. Then a subway driver action sensoring and detection system is built based on the proposed model to realize real-time detection from surveillance cameras. The system runs on a personal laptop; according to the runtime of the system, it takes 0.6 to 0.75 s for a whole process, which is less than the video duration of 2.13 s. It can be seen that the system meets the real-time detection requirements.
In the future research, we will further optimize our system, expand the dataset, and improve the performance. In addition, the action statistics function is taken into account for the subway driver action sensoring and detection to count the number of actions completed by the driver.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}