
Echo Frequency Estimation Technology for Passive Surface Acoustic Wave Resonant Sensors Based on a Genetic Algorithm


Abstract
:1. Introduction
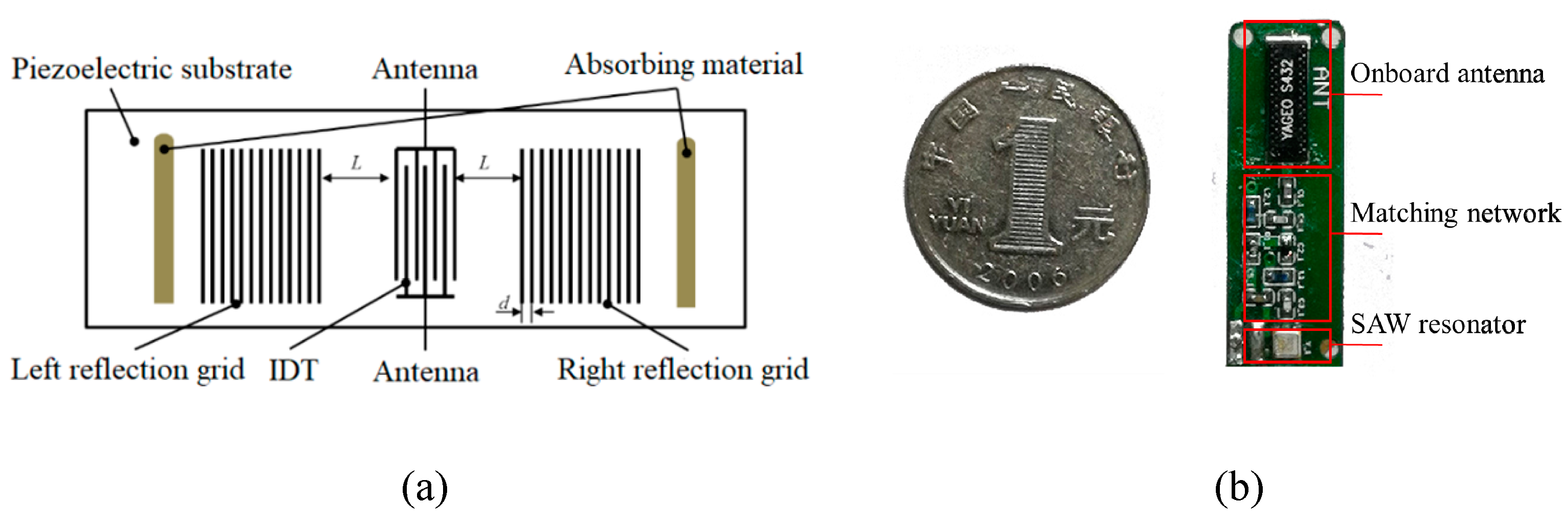
2. The Characteristics of a SAW Resonator
3. The Principle of Single-Parameter Genetic Algorithm Estimation for SAW Resonance Frequency
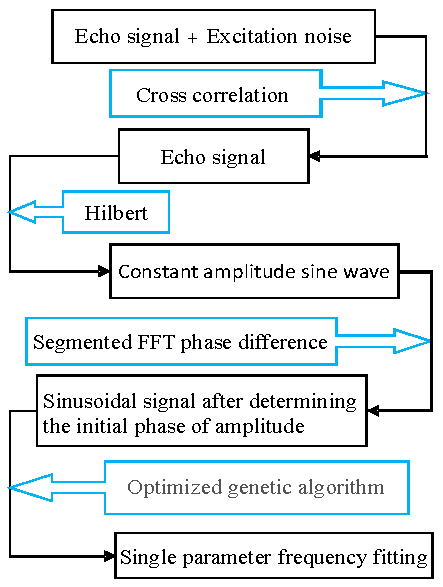
3.1. Research on a Frequency Detection Method for the Surface Acoustic Wave Echo Signal
3.2. Estimation of the Amplitude and Phase of the Sensing Echo Signal
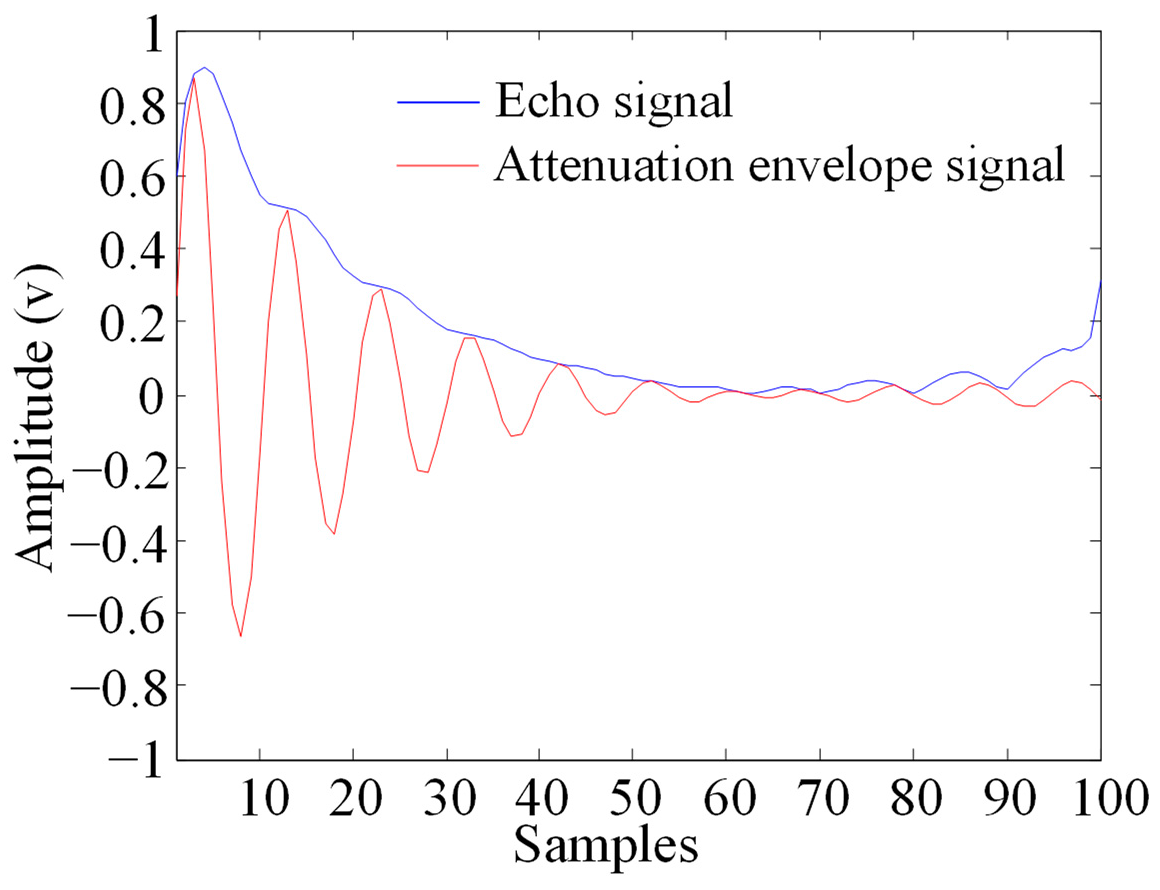
3.2.1. Hilbert Complex Analytic Envelope Demodulation
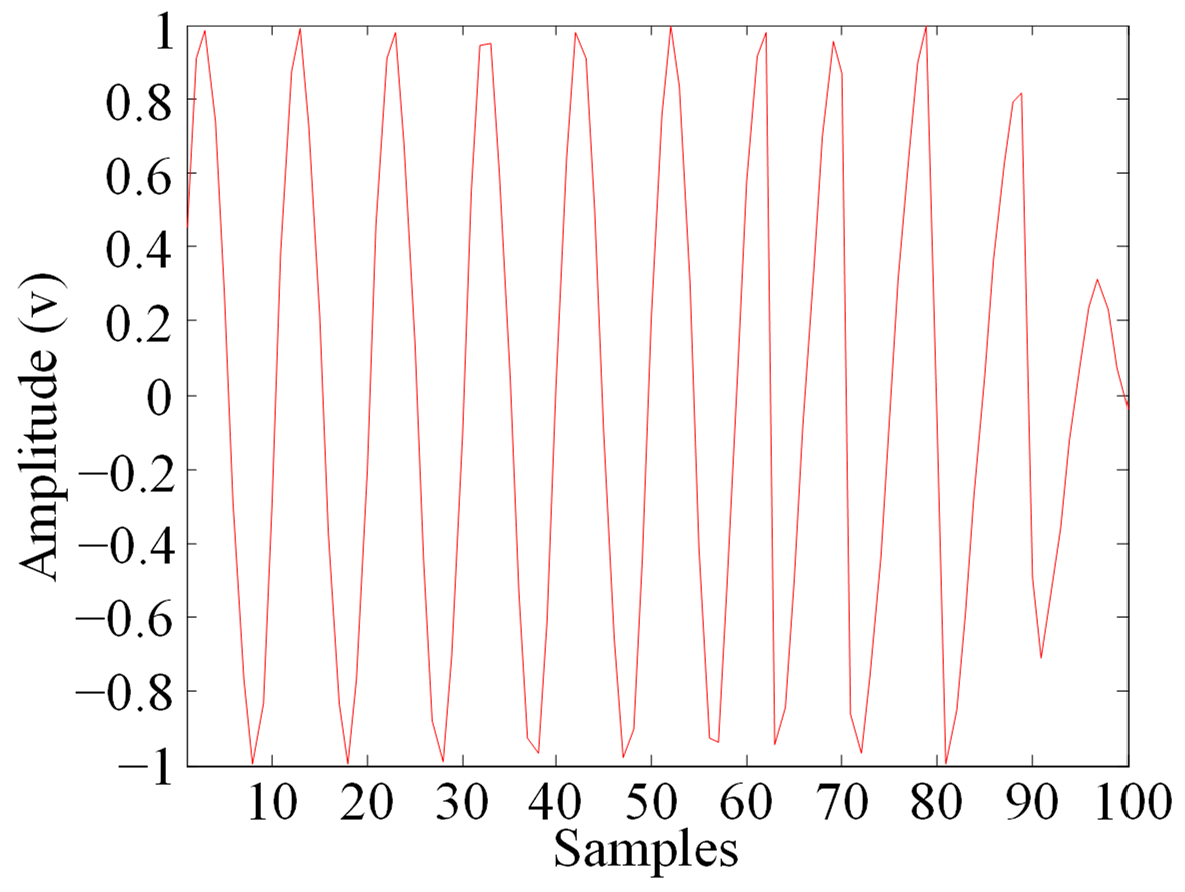
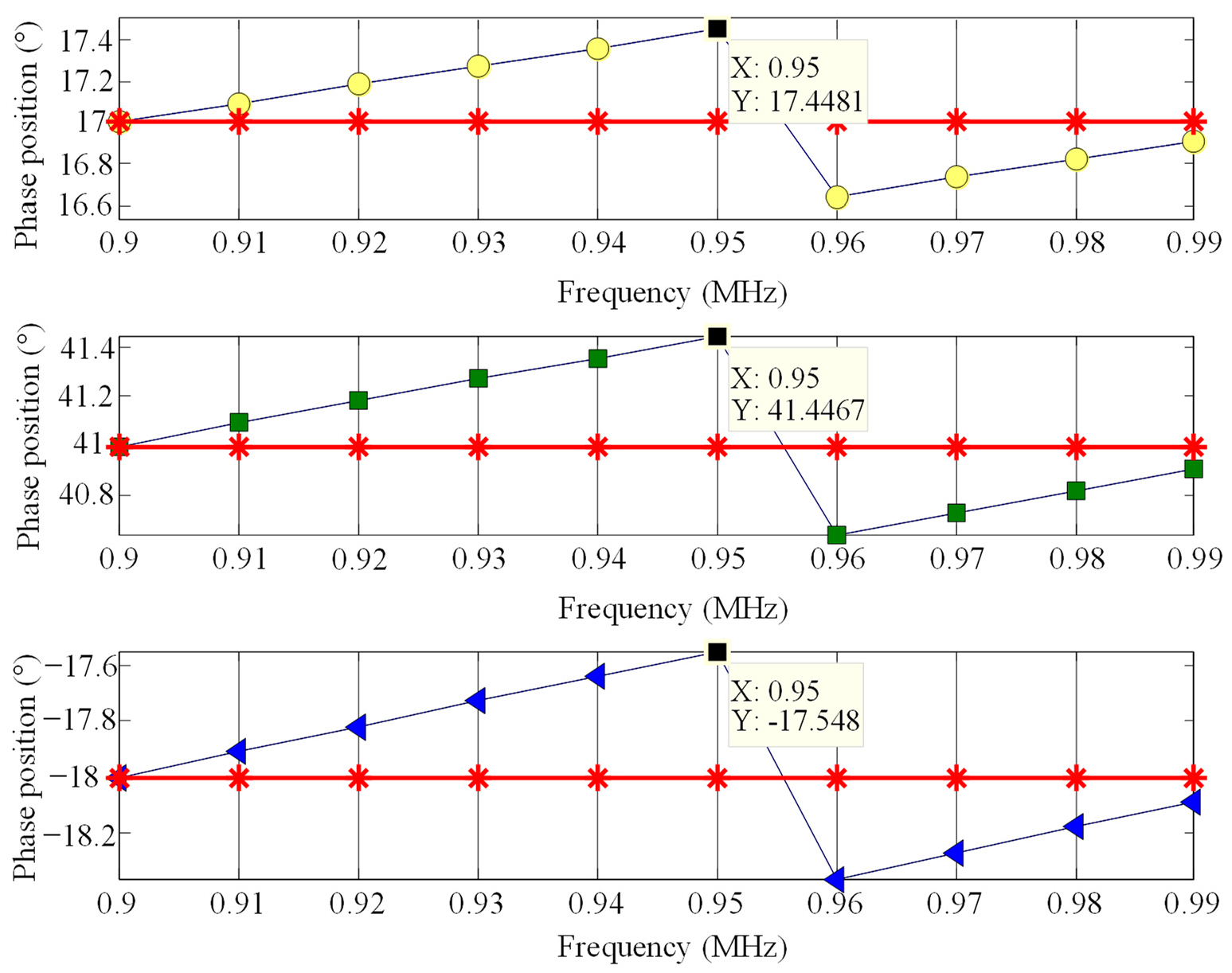
3.2.2. Segmented FFT Initial Phase Analysis
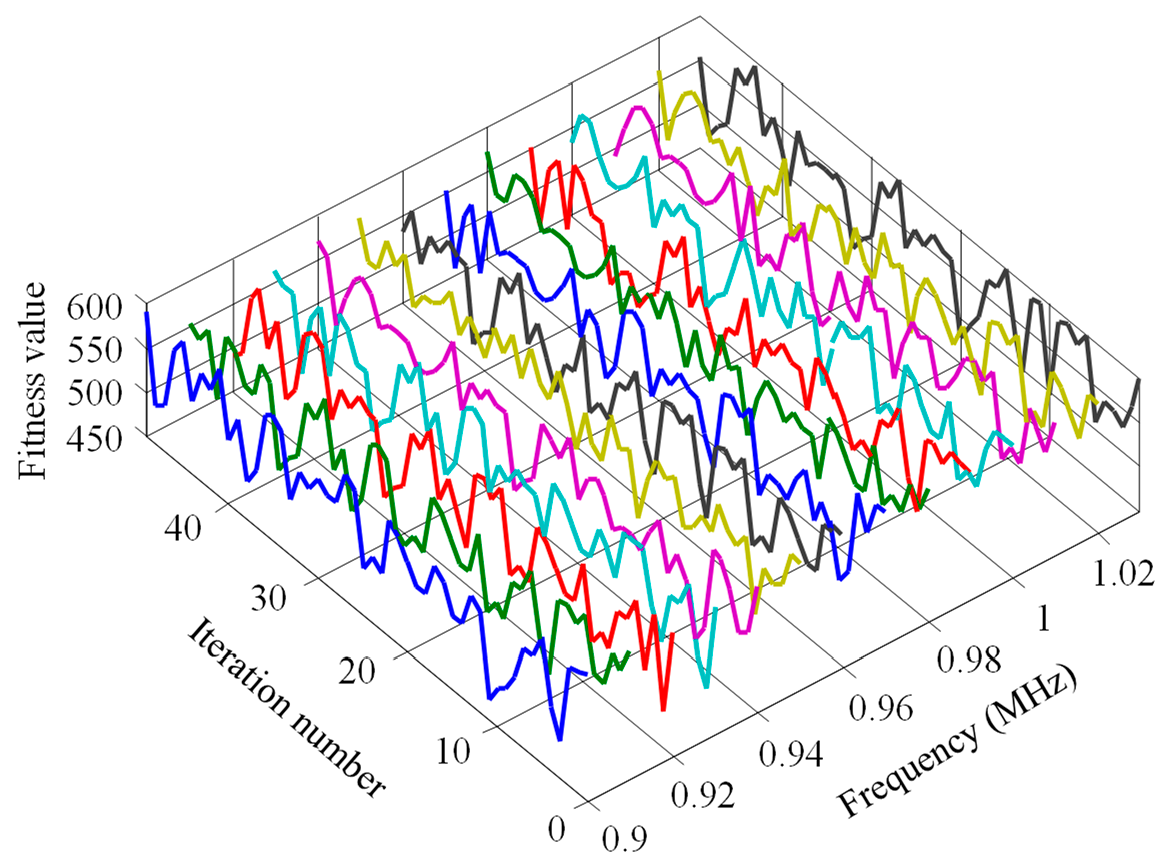
3.3. Single-Parameter Genetic Algorithm Estimation of the Signal Frequency
3.3.1. Determine Selection Operator
- (1)
- The survival expectation number of individual in a population with size is , and is the fitness function value of the individual.
- (2)
- The determined survival number of the individual selected into the next generation population is ; then, the number of individuals in the next generation population is , and is rounded upward.
- (3)
- individuals are arranged in descending order according to the value of the fitness function, and the first individuals are selected.
3.3.2. Optimization of the Fitness Function
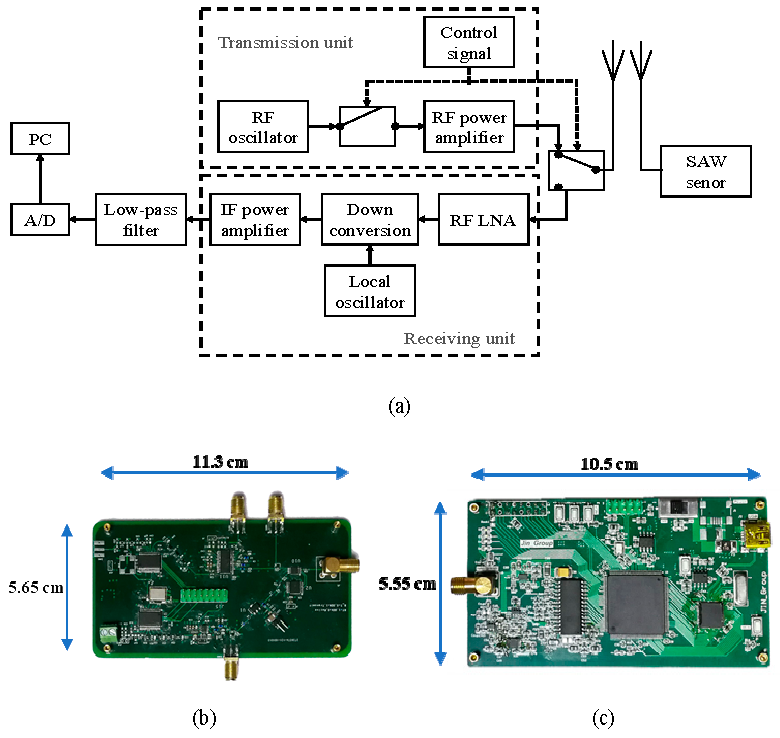
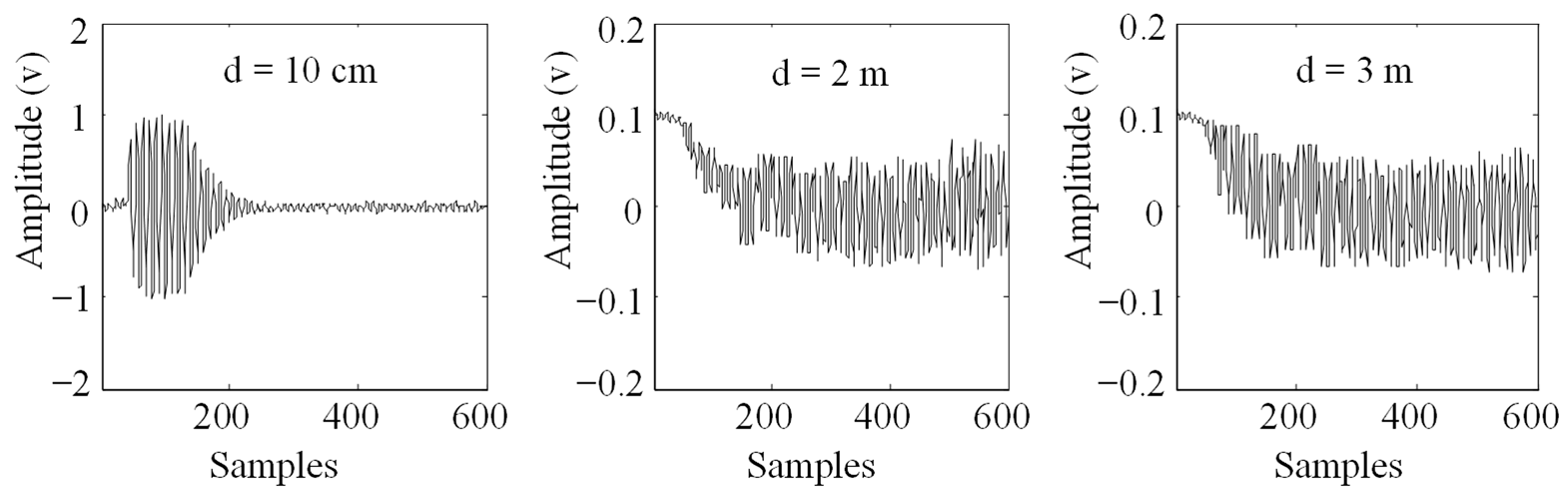
4. Experimental Data Analysis
4.1. Hilbert Envelope Demodulation Analysis
4.2. Segmented FFT for Signal Phase Estimation
4.3. Upper Bound Deterministic Selection Method for Iterative Algebra
4.4. Accuracy Analysis of Genetic Algorithm Frequency Estimation
4.5. Comparison of Single-Parameter and Multi-Parameter Genetic Algorithms
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kang, A.; Lin, J.; Ji, X. A high-sensitivity pressure sensor based on surface transverse wave. Sens. Actuators A Phys. 2012, 187, 141–146. [Google Scholar] [CrossRef]
- Martin, G.; Berthelot, P.; Masson, J. Measuring the Inner Body Temperature using a Wireless Temperature SAW-sensor-based System. In Proceedings of the 2007 Ultrasonics Symposium, New York, NY, USA, 28–31 October 2007; pp. 2089–2092. [Google Scholar]
- Bardong, J.; Aubert, T.; Naumenko, N. Experimental and theoretical investigations of some useful langasite cuts for high-temperature SAW applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 814–823. [Google Scholar] [CrossRef] [PubMed]
- Bell, D.L.T.; Li, R.C.M. Surface-acoustic-wave resonators. Proc. IEEE 1976, 64, 711–721. [Google Scholar] [CrossRef]
- Guo, J.; Luo, Z.; Liu, B. Discrimination of echo signal of acoustic surface wave resonator. In Proceedings of the 2017 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Nanjing, China, 11–14 October 2017; pp. 70–76. [Google Scholar]
- Wang, W.; Xue, X.; Fan, S. Development of a wireless and passive temperature-compensated SAW strain sensor. Sens. Actuators A Phys. 2020, 308, 112015. [Google Scholar] [CrossRef]
- Liu, B.; Han, T.; Zhang, C. Error correction method for passive and wireless resonant SAW temperature sensor. IEEE Sens. J. 2015, 15, 3608–3614. [Google Scholar] [CrossRef]
- Rodríguez-Madrid, J.G.; Iriarte, G.F.; Williams, O.A. High precision pressure sensors based on SAW devices in the GHz range. Sens. Actuators A Phys. 2013, 189, 364–369. [Google Scholar] [CrossRef]
- Pohl, A.; Ostermayer, G.; Reindl, L. Monitoring the tire pressure at cars using passive SAW sensors. In Proceedings of the 1997 IEEE Ultrasonics Symposium Proceedings, an International Symposium (Cat. No. 97CH36118), Toronto, ON, Canada, 5–8 October 1997; Volume 1, pp. 471–474. [Google Scholar]
- Mandal, D.; Banerjee, S. Surface acoustic wave (SAW) sensors: Physics, materials, and applications. Sensors 2022, 22, 820. [Google Scholar] [CrossRef] [PubMed]
- Dixon, B.; Kalinin, V.; Beckley, J. A second generation in-car tire pressure monitoring system based on wireless passive SAW sensors. In Proceedings of the 2006 IEEE International Frequency Control Symposium and Exposition, Miami, FL, USA, 4–7 June 2006; pp. 374–380. [Google Scholar]
- Qiu, M.; Ming, Z.; Li, J. Phase-change memory optimization for green cloud with genetic algorithm. IEEE Trans. Comput. 2015, 64, 3528–3540. [Google Scholar] [CrossRef]
- Lee, Y.H.; Park, S.K.; Chang, D.E. Parameter estimation using the genetic algorithm and its impact on quantitative precipitation forecast. In Annales Geophysicae; Copernicus Publications: Göttingen, Germany, 2006; Volume 24, pp. 3185–3189. [Google Scholar]
- Arabali, A.; Ghofrani, M.; Etezadi-Amoli, M. Genetic-algorithm-based optimization approach for energy management. IEEE Trans. Power Deliv. 2012, 28, 162–170. [Google Scholar] [CrossRef]
- Tuhus-Dubrow, D.; Krarti, M. Genetic-algorithm based approach to optimize building envelope design for residential buildings. Build. Environ. 2010, 45, 1574–1581. [Google Scholar] [CrossRef]
- Wen, Y.M.; Li, P.; Yang, J.; Zheng, M. Detecting and evaluating the signals of wirelessly interrogational passive SAW resonator sensors. IEEE Sens. J. 2004, 4, 828–836. [Google Scholar] [CrossRef]
- Mitra, S.K. Digital Signal Processing: A Computer-Based Approach; McGraw-Hill: New York, NY, USA, 2011. [Google Scholar]
- Shahriar, M.R.; Borghesani, P.; Randall, R.B. An assessment of envelope-based demodulation in case of proximity of carrier and modulation frequencies. Mech. Syst. Signal Process. 2017, 96, 176–200. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, C.; Zhao, B. Frequency evaluation of SAW torque response signal using Hilbert envelope-demodulation. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010; Volume 9, pp. 4069–4073. [Google Scholar]
- Guoqing, Q. Digital signal processing in FMCW radar marine tank gauging system. In Proceedings of the Third International Conference on Signal Processing (ICSP’96), Beijing, China, 18 October 1996; Volume 1, pp. 7–10. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Accuracy of Frequency Estimation | Genetic Algebra | Running Time |
|---|---|---|---|
| Single-parameter genetic algorithm | error ≤ 3 KHz | 16th generation | 0.952 s |
| Multi-parameter genetic algorithm | error ≤ 22 kHz | irregularity | 7.975 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Li, Y.; Wang, X.; Zhang, J.; Yang, J. Echo Frequency Estimation Technology for Passive Surface Acoustic Wave Resonant Sensors Based on a Genetic Algorithm. Sensors 2023, 23, 9401. https://doi.org/10.3390/s23239401
Wu Y, Li Y, Wang X, Zhang J, Yang J. Echo Frequency Estimation Technology for Passive Surface Acoustic Wave Resonant Sensors Based on a Genetic Algorithm. Sensors. 2023; 23(23):9401. https://doi.org/10.3390/s23239401
Chicago/Turabian StyleWu, Yufen, Yanling Li, Xue Wang, Jianchao Zhang, and Jin Yang. 2023. "Echo Frequency Estimation Technology for Passive Surface Acoustic Wave Resonant Sensors Based on a Genetic Algorithm" Sensors 23, no. 23: 9401. https://doi.org/10.3390/s23239401