



Guided Wave Characteristic Research and Probabilistic Crack Evaluation in Complex Multi-Layer Stringer Splice Joint Structure
Abstract
:1. Introduction
2. Guided Wave Characteristics Investigation in MLSSJ Structure
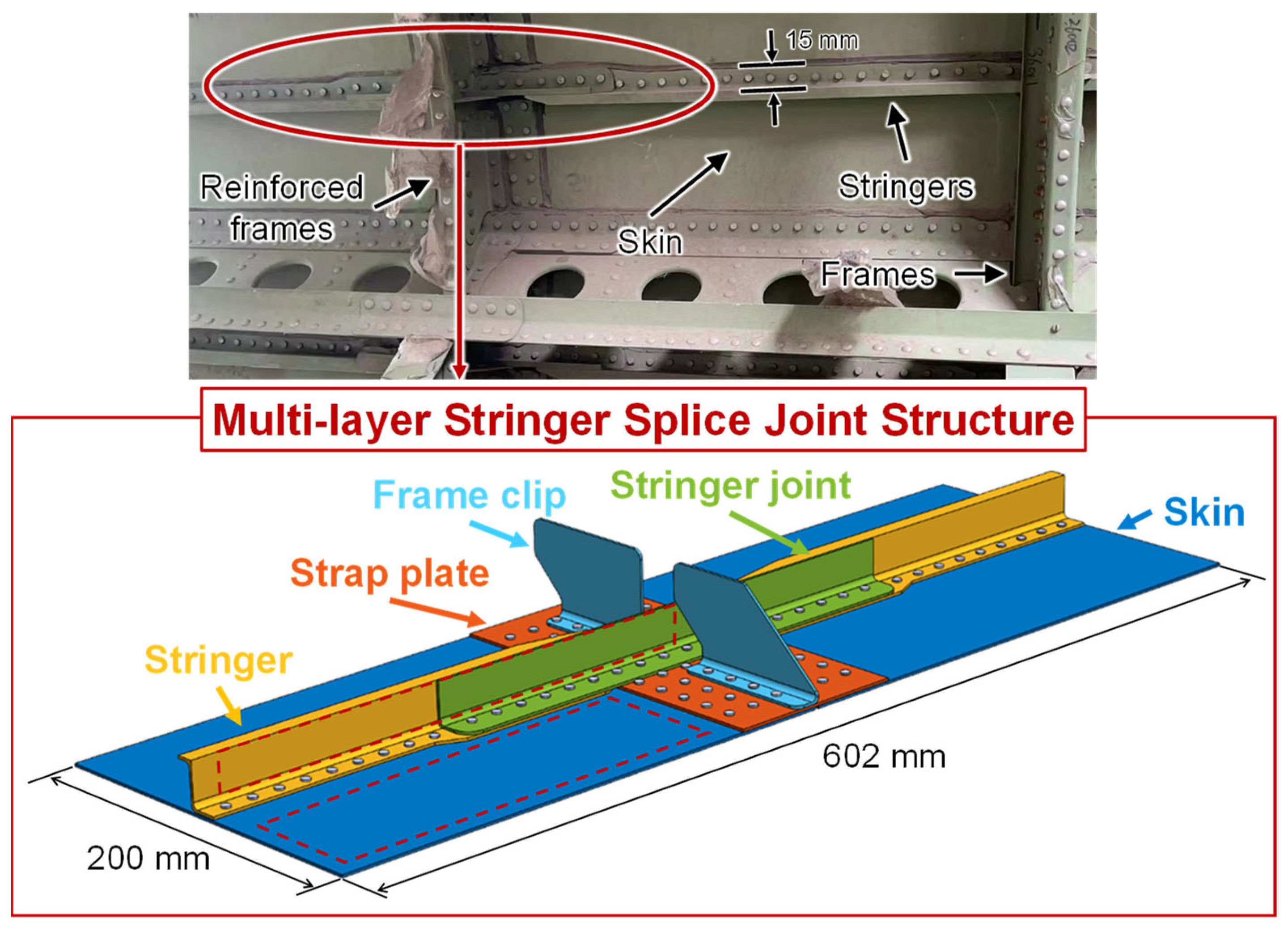
2.1. Complex Muzlti-Layer Stringer Splice Joint Structure
2.2. Guided Wave Propagation Characteristics in Multi-Layer Components
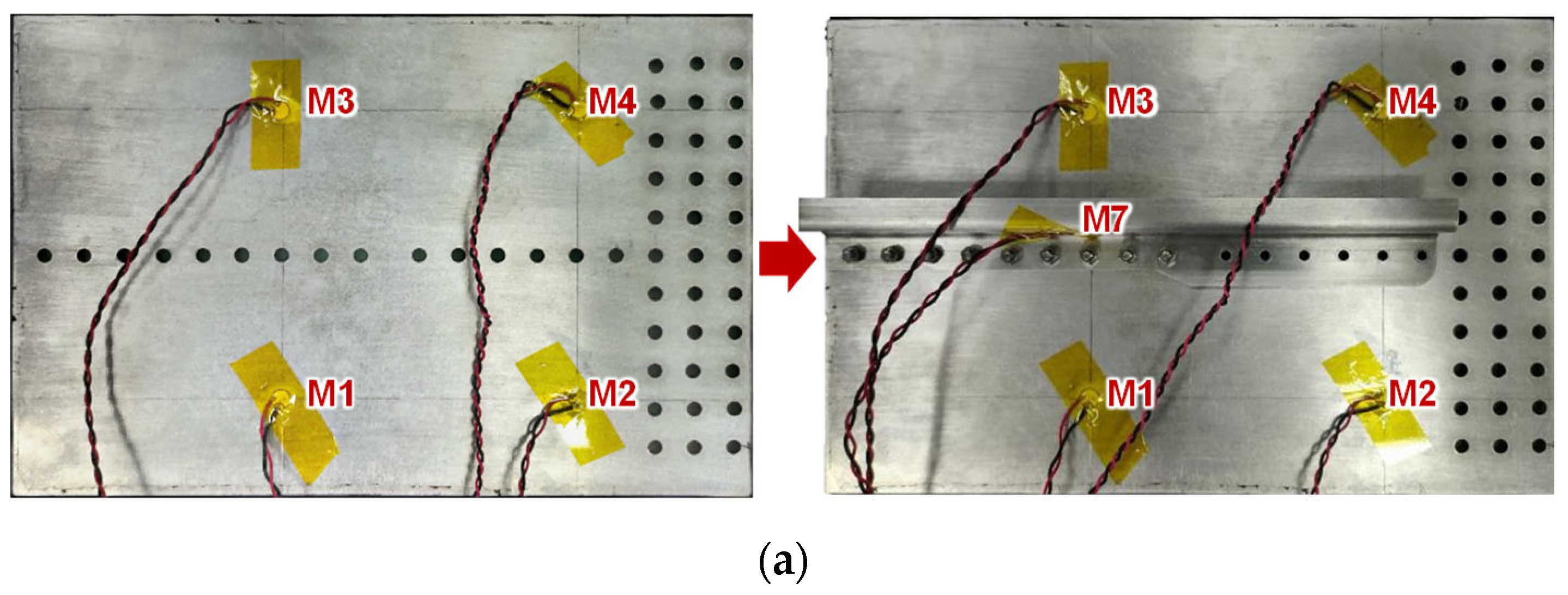
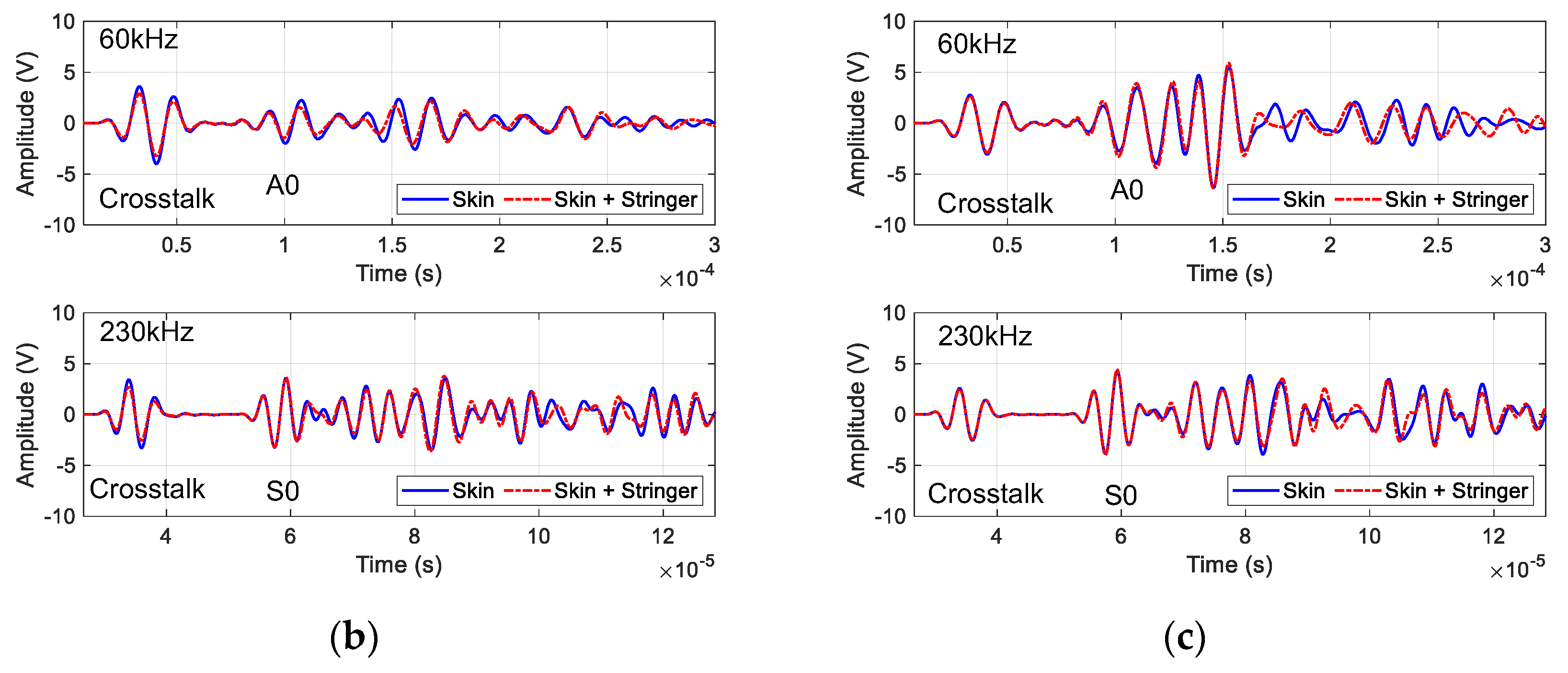
2.2.1. Guided Wave in the Skin Affected by the Stringer
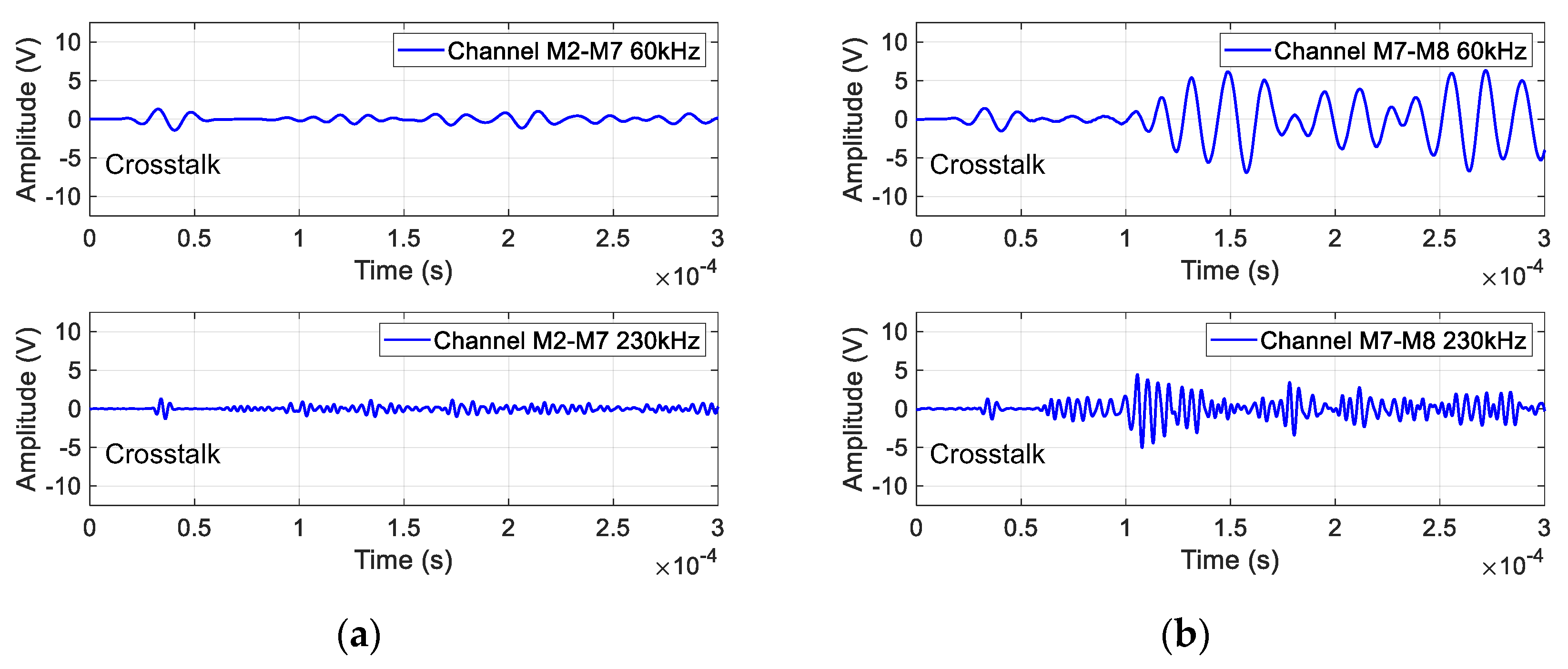
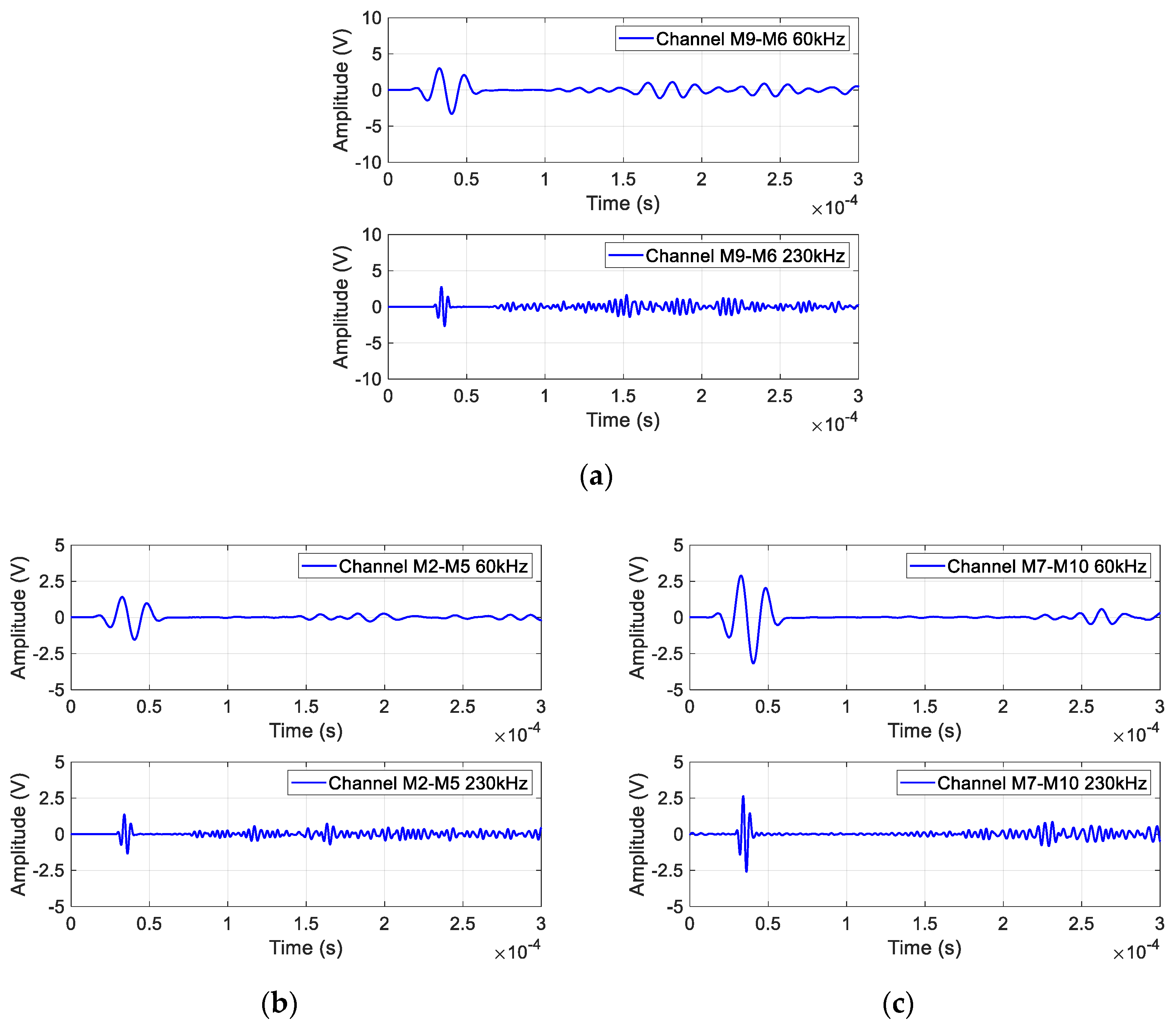
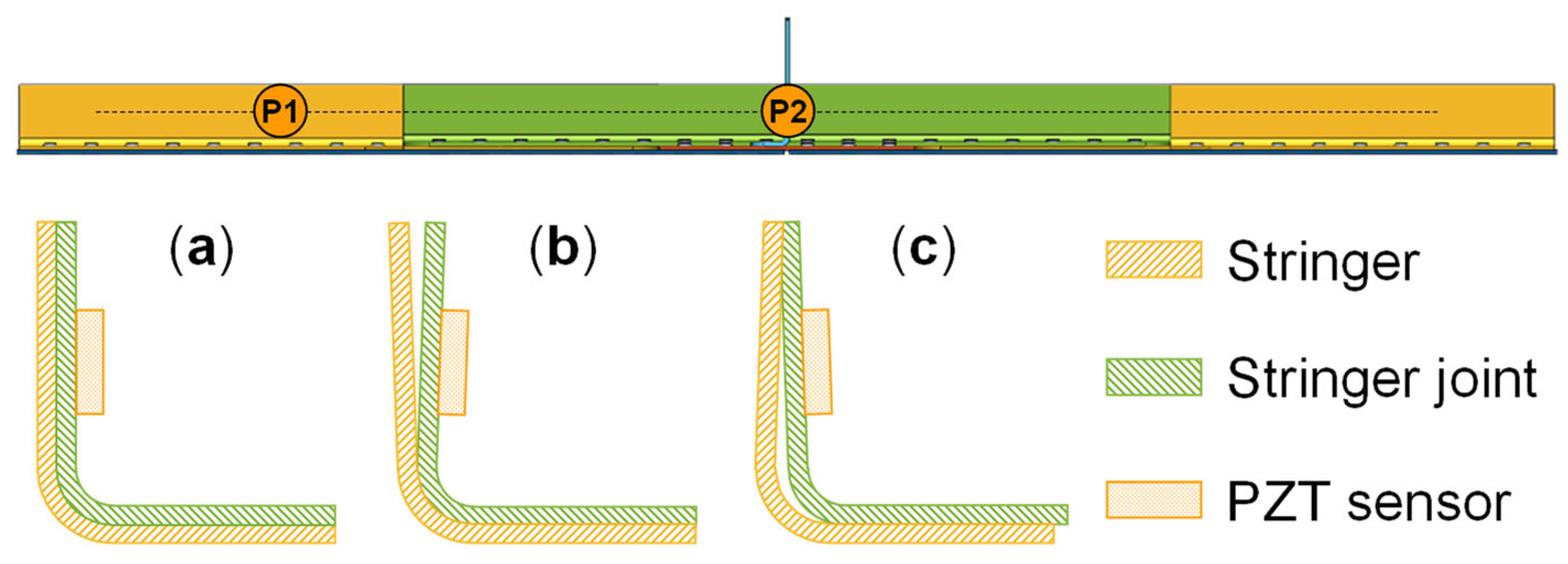
2.2.2. Guided Wave Propagation through Stringers and Joints
2.2.3. Numerical Simulation of Guided Waves in the MLSSJ Structure
2.3. Guided Wave Affected by Simulated Damages in MLSSJ Structure
- The signal excited in the skin is difficult to propagate from the skin to the stringer. So, it is better to arrange PZTs on the skin to monitor its damage.
- When guided waves propagate through a right-angle bend, significant amplitude attenuation and mode conversion occur. Hence, arranging PZTs in the same plane is a preferable option. The propagation of guided waves through the stringer and stringer joint results in signal amplitude increase due to boundary reflections. Therefore, it is worth considering placing channels for interlayer propagation on the stringer and stringer joint, especially when focusing on their connection area. However, guided wave signals propagated through three layers exhibit low amplitude; thus, it is advisable to avoid deploying sensors in such configurations.
- Monitoring damage through more than two-layer structural elements is challenging. Therefore, it is advisable to avoid using PZT sensors on the skin to monitor damage on the stringer joint or using PZT sensors on the stringer joint to monitor damage on the skin. However, the channels between the stringer and stringer joint benefit from enhanced signal amplitude due to boundary reflections, enabling the guided wave amplitude to perceive the effects of damage.
3. GP-Based Probabilistic Mining Diagnosis with Path-Wave Band Feature
3.1. Path-Wave Band Feature Extraction of Guided Waves
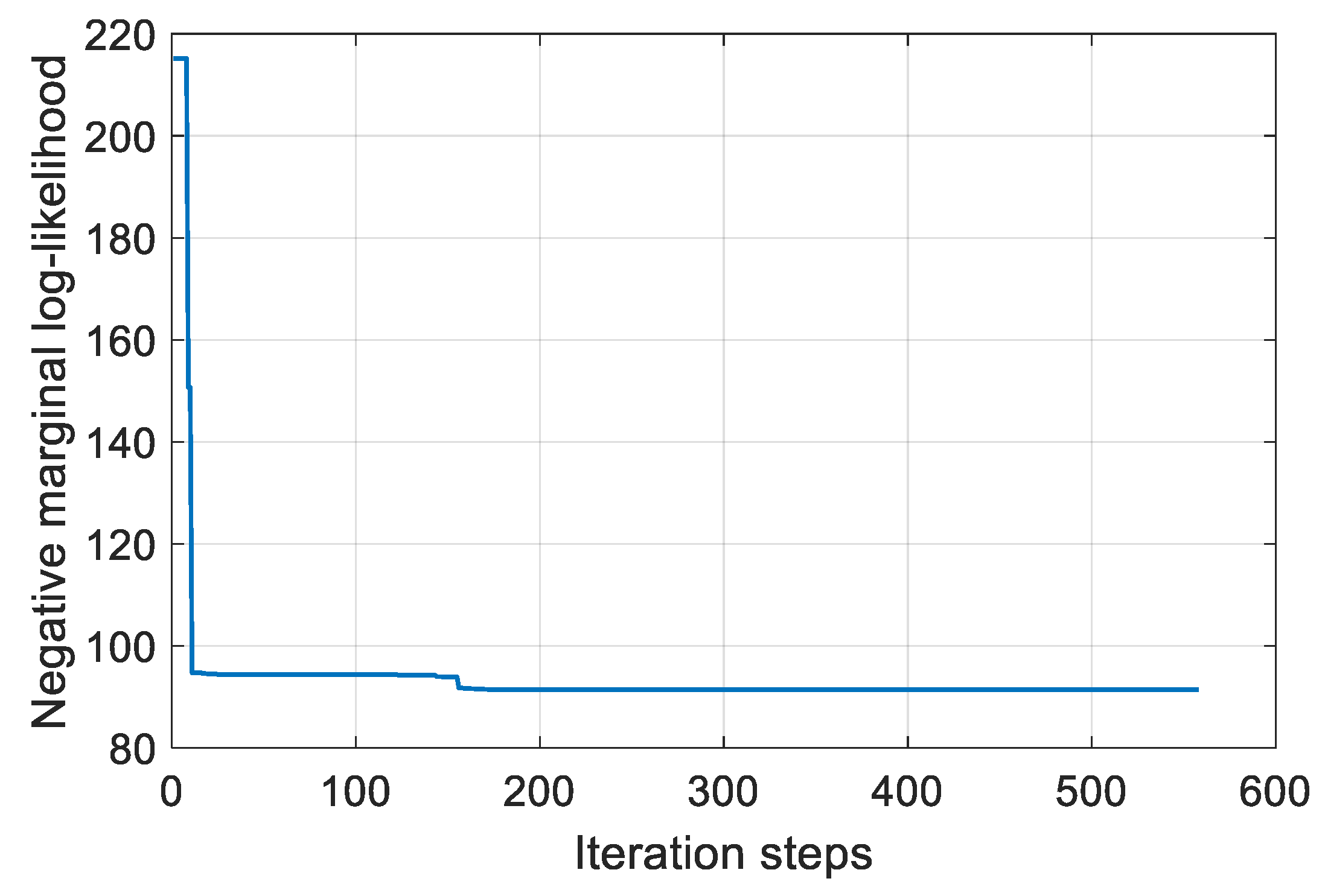
3.2. GP-Based Probabilistic Mining Diagnosis Method
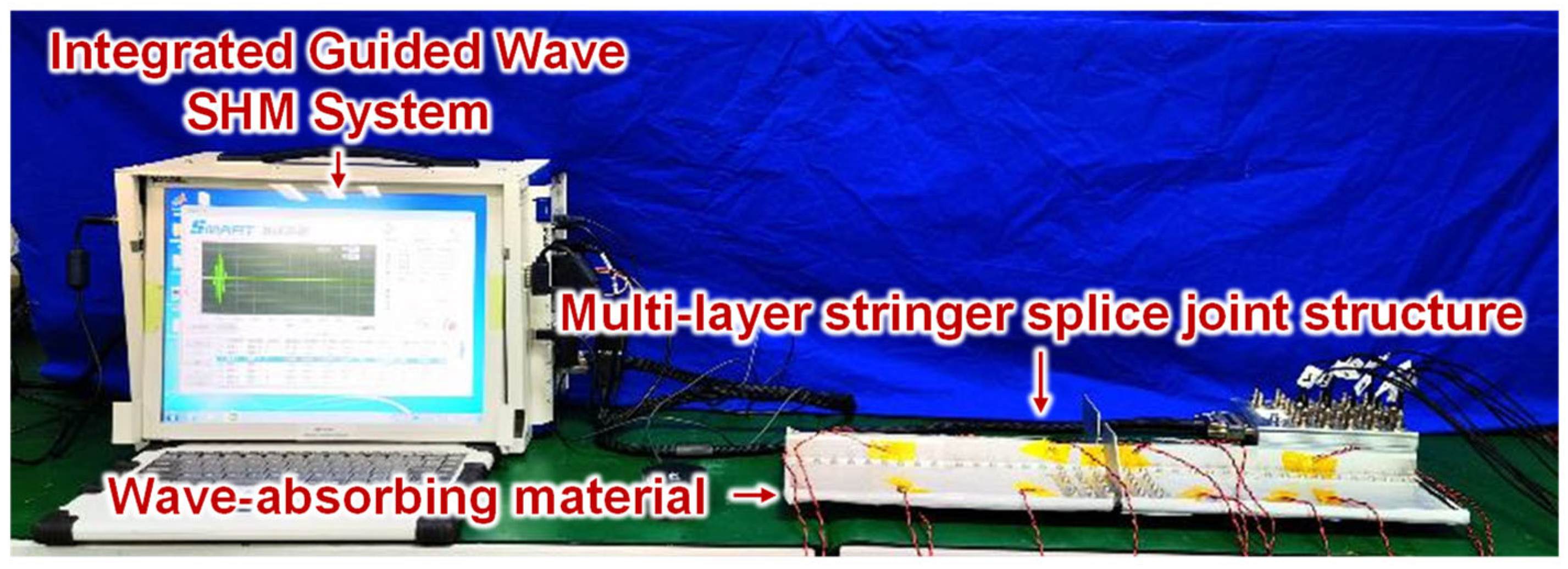
4. Experimental Validation on Crack Evaluation in MLSSJ Structure
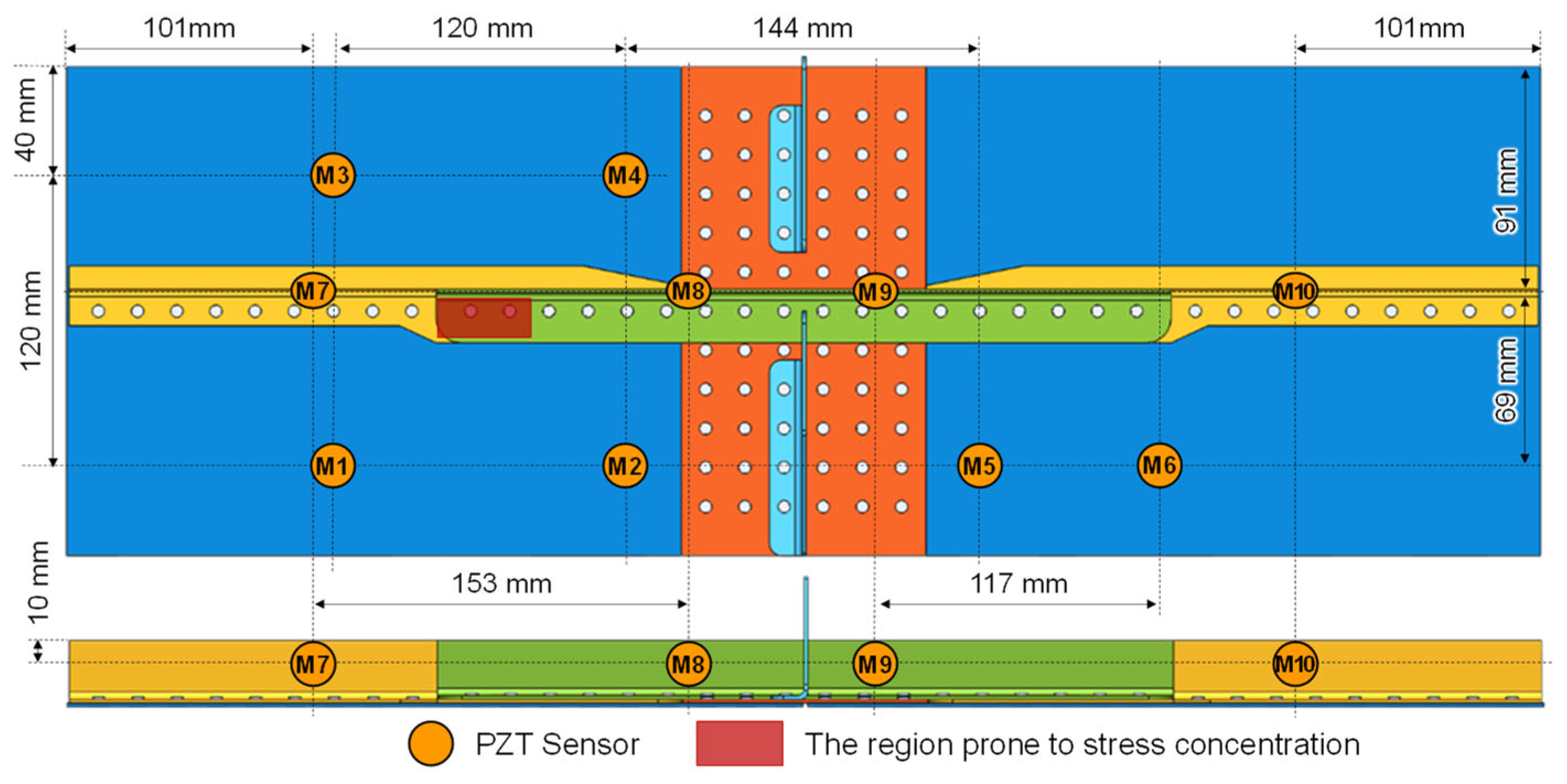
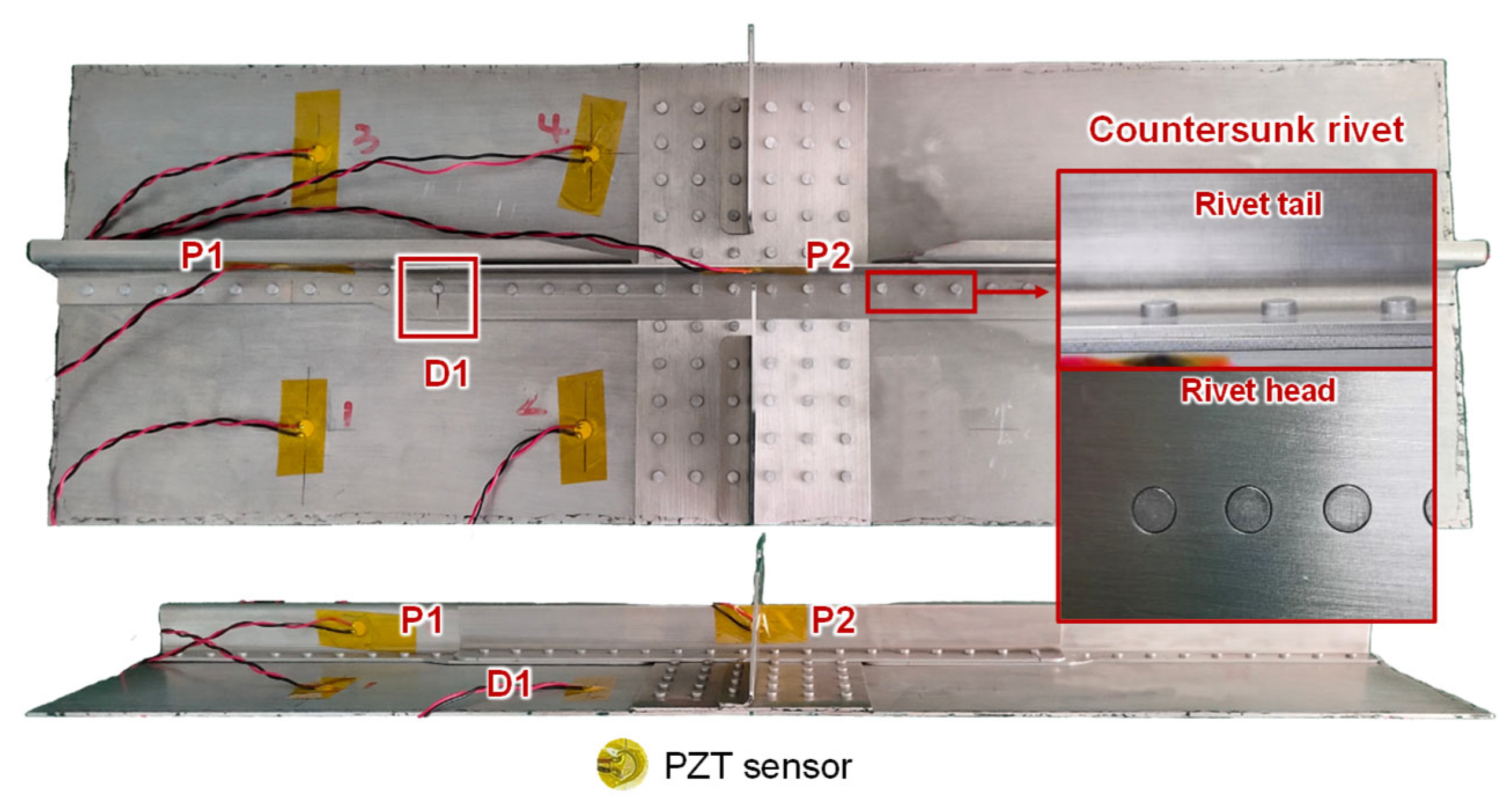
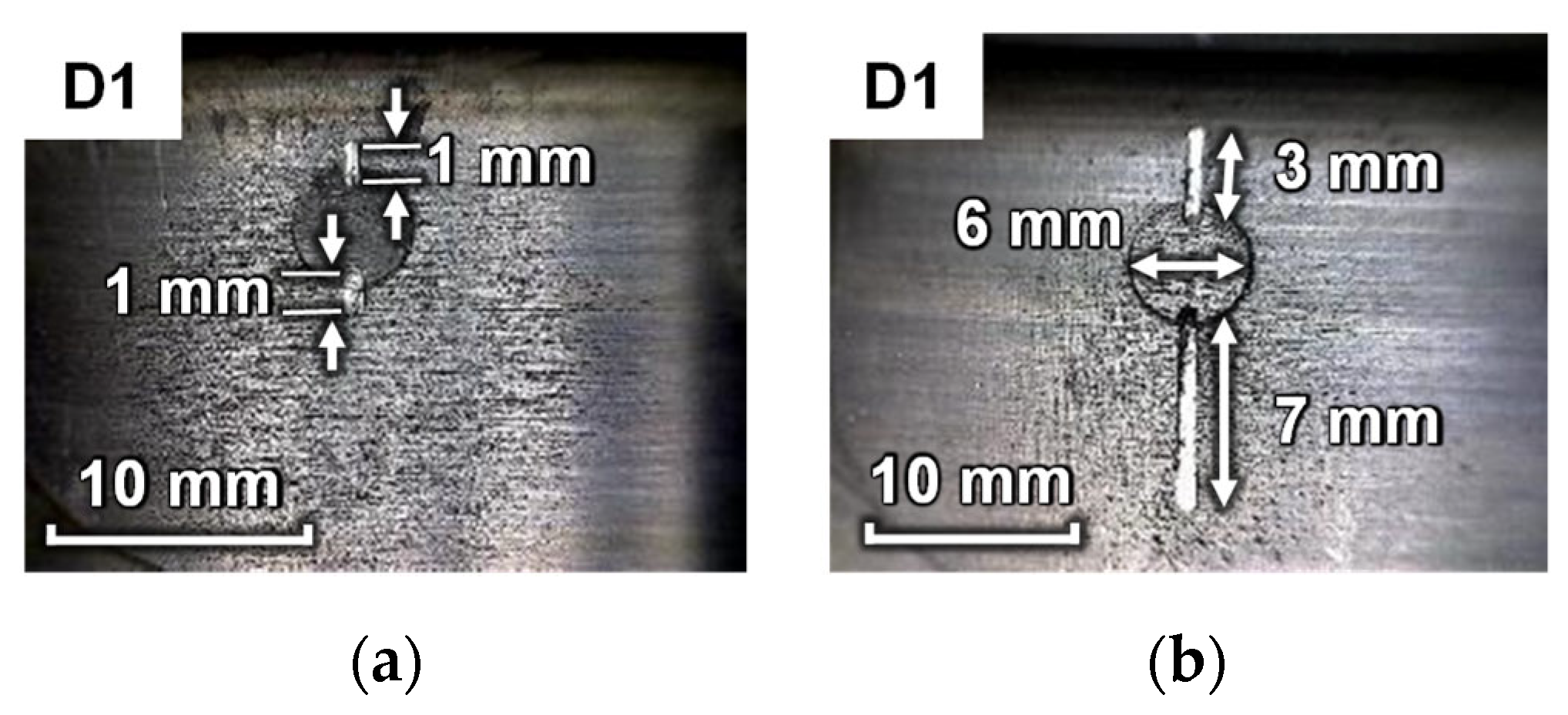
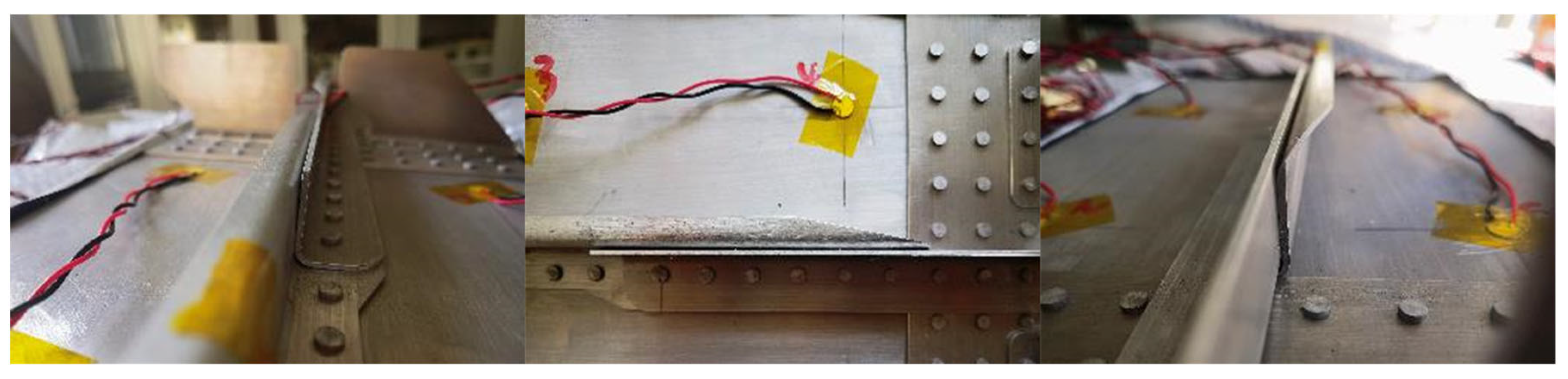
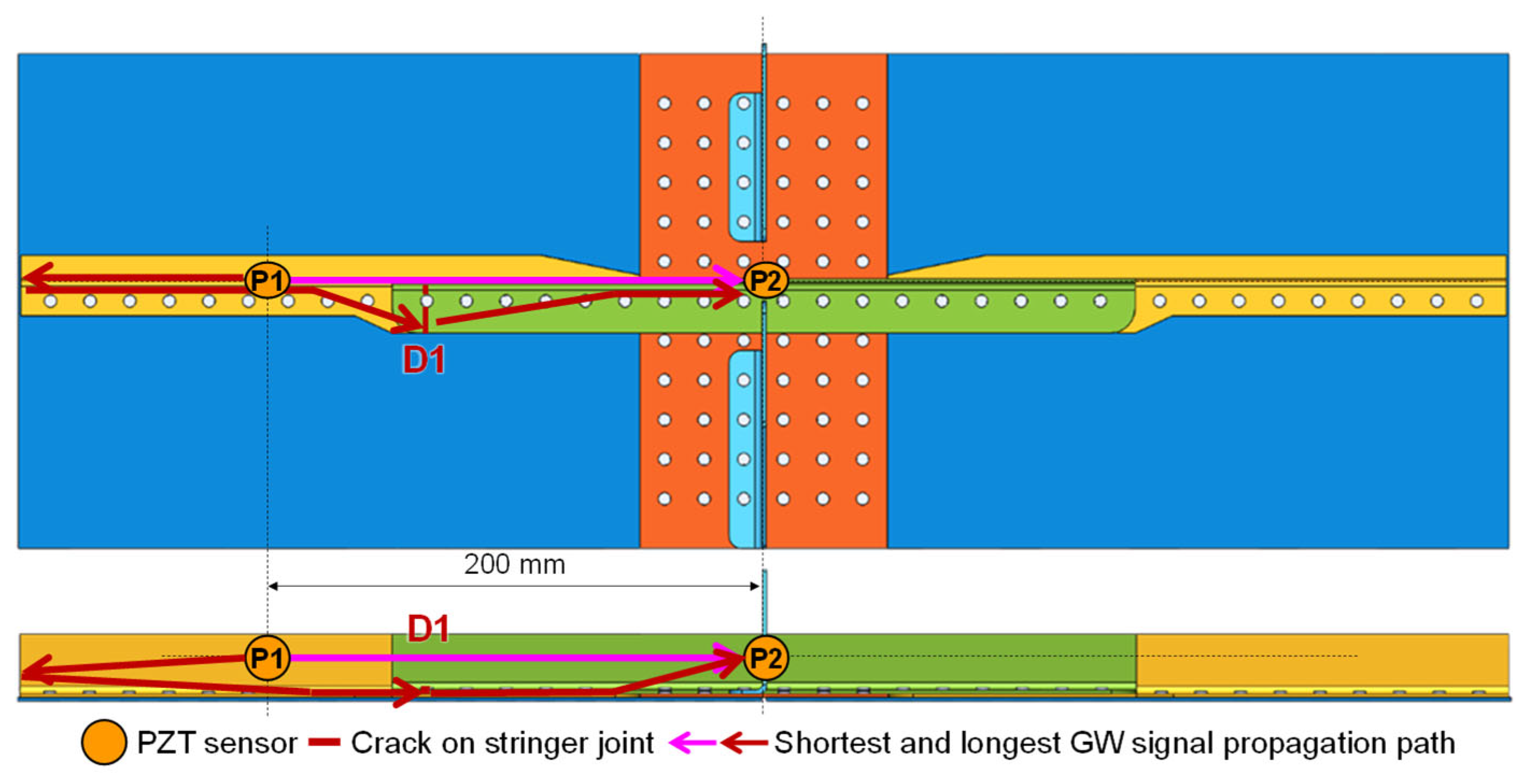
4.1. Setup of Crack Damages in the MLSSJ Structure
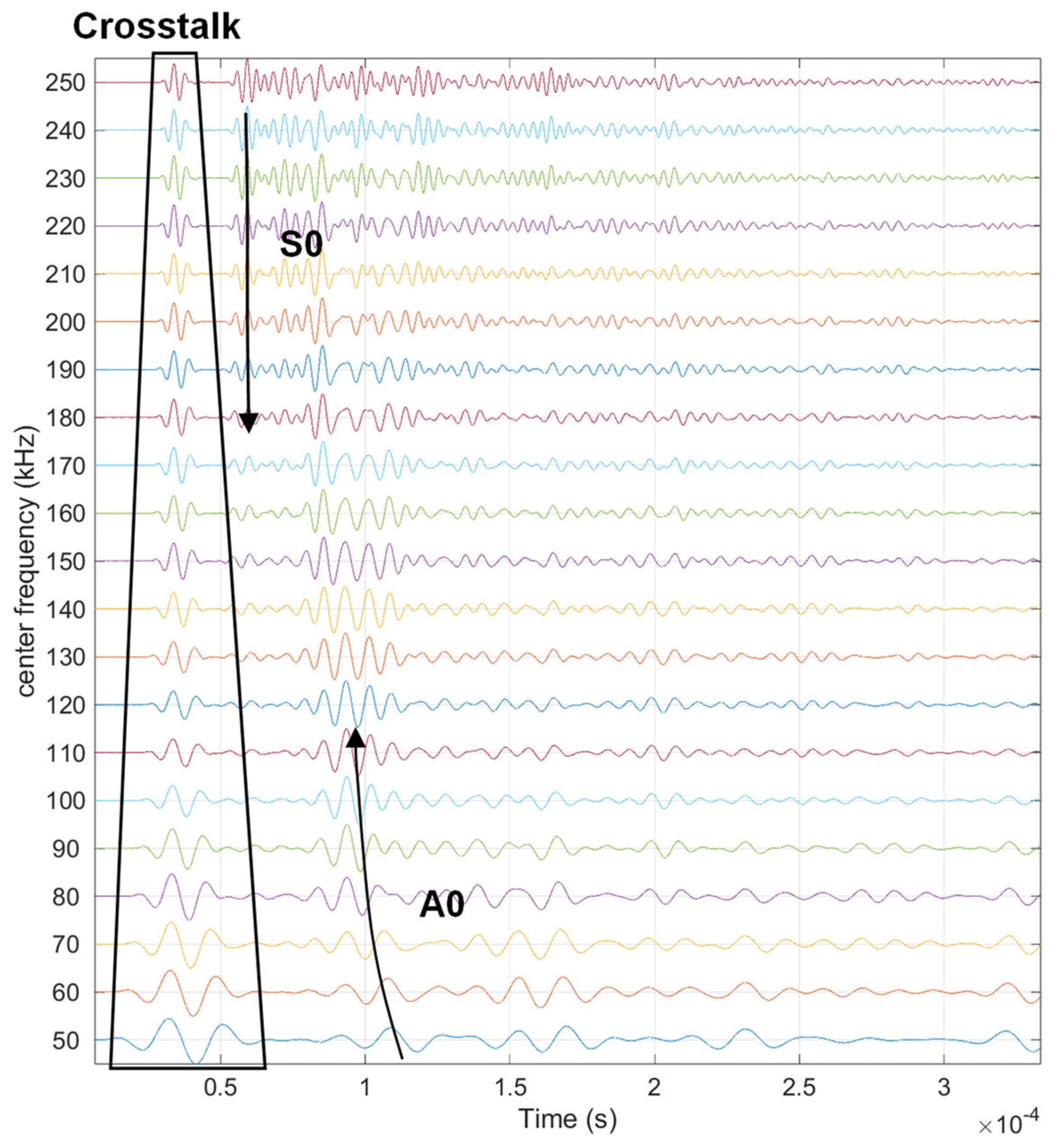
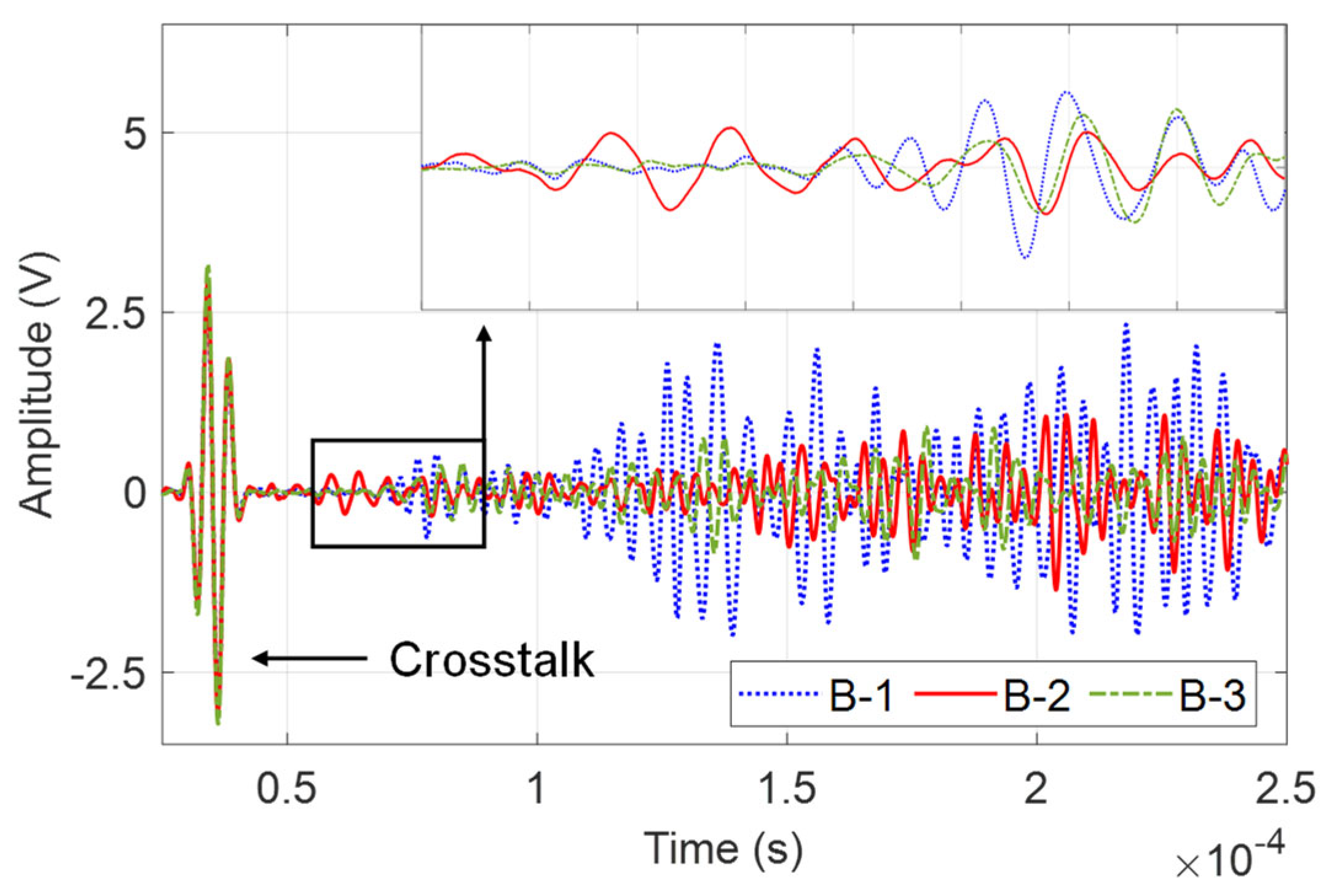
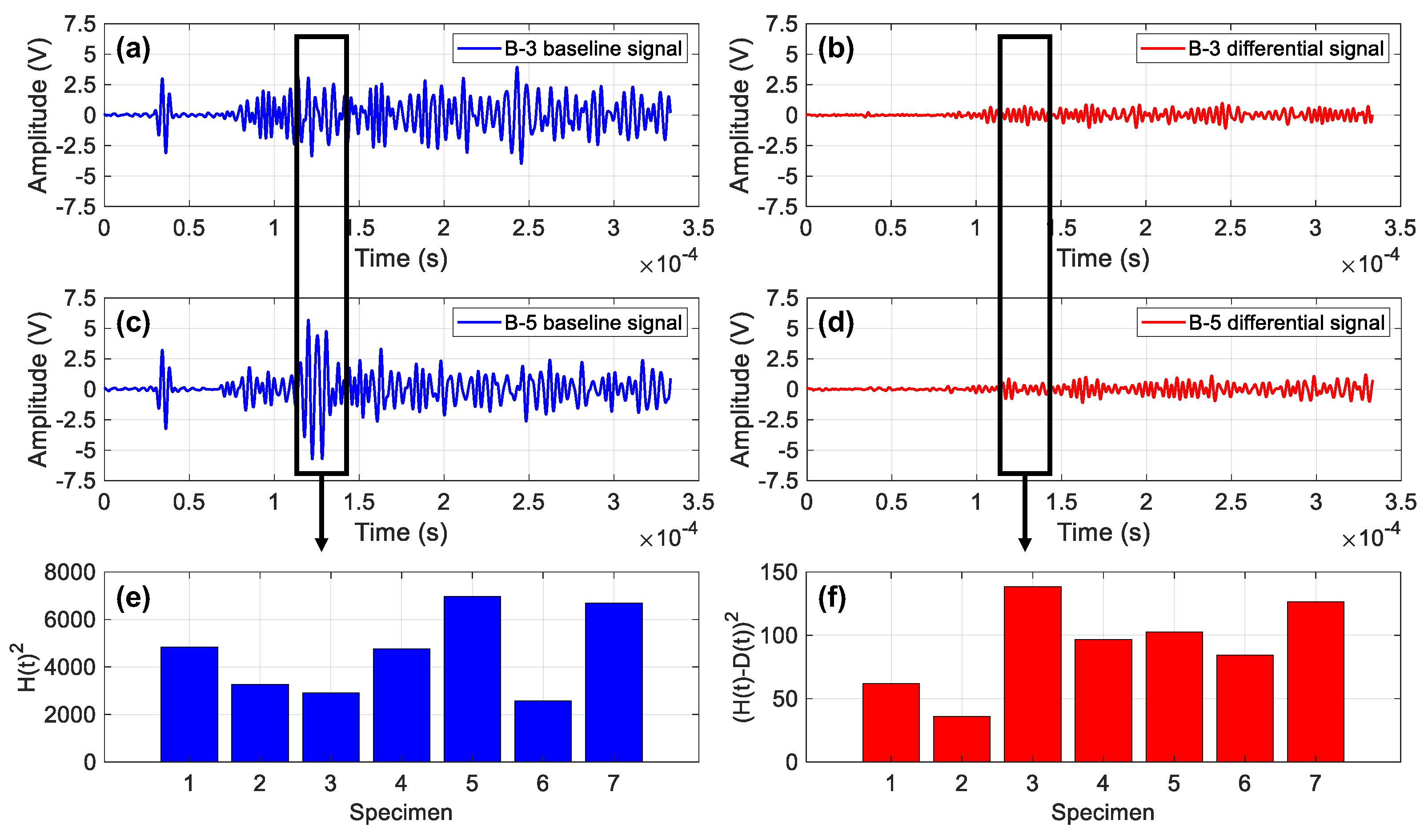
4.2. Typical Guided Wave Signal in a Batch of MLSSJ Structures
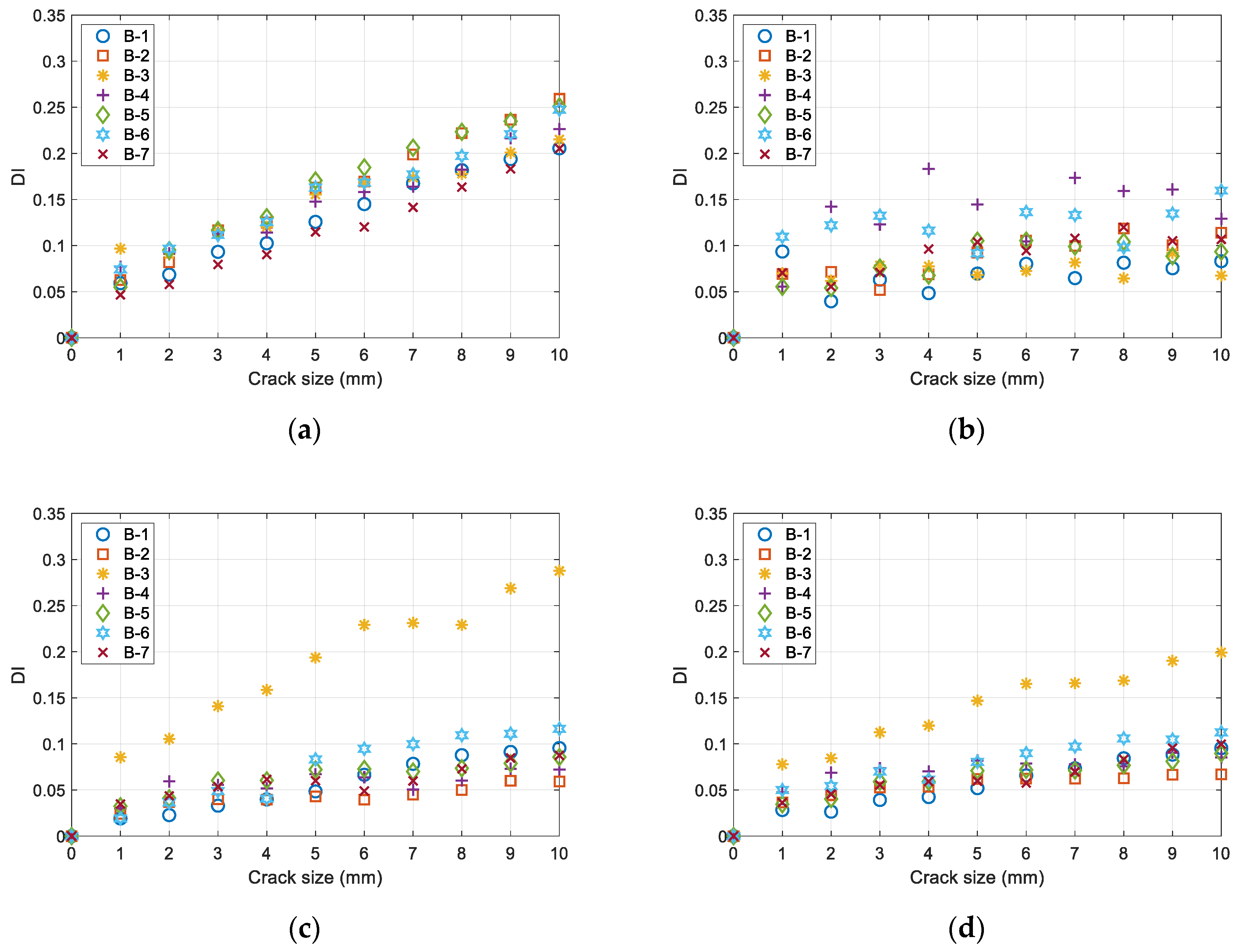
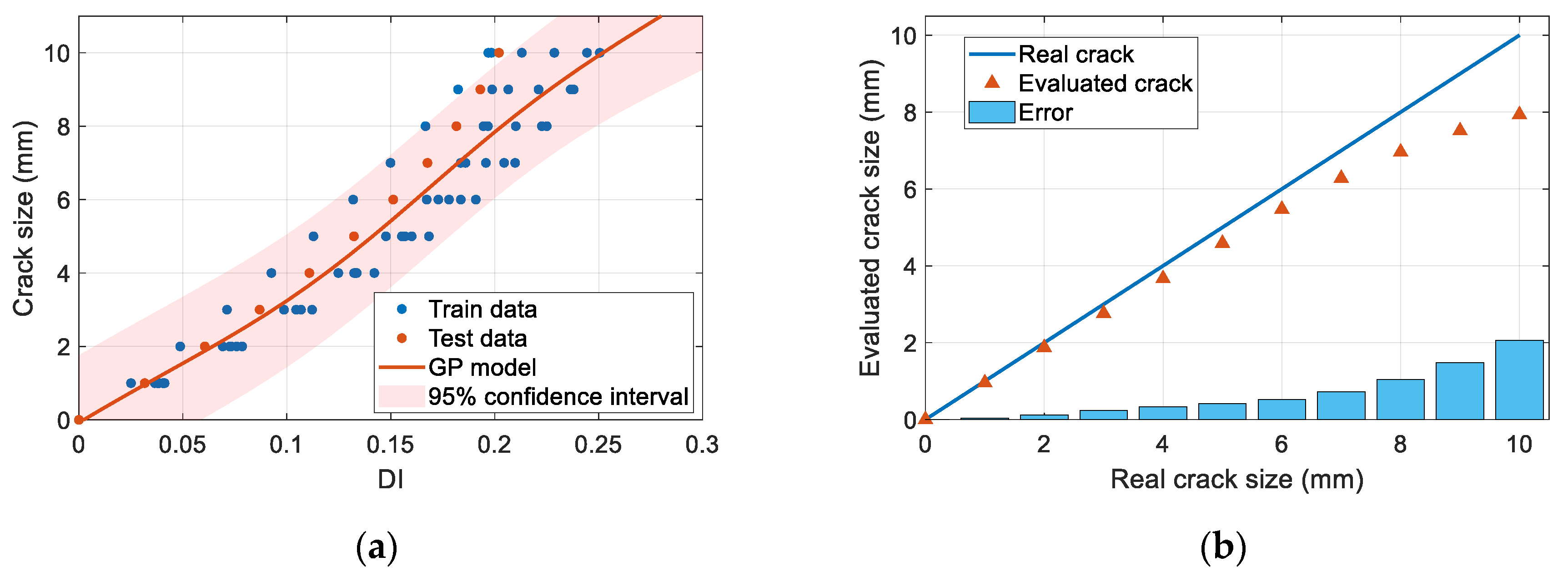
4.3. Guided Wave Crack Evaluation in the MLSSJ Structures
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Skorupa, A.; Skorupa, M. Riveted Lap Joints in Aircraft Fuselage: Design, Analysis and Properties; Springer: Dordrecht, The Netherlands, 2012. [Google Scholar]
- Ostachowicz, W. New Trends in Structural Health Monitoring; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Yuan, S.; Ren, Y.; Qiu, L.; Mei, H. A multi-response-based wireless impact monitoring network for aircraft composite structures. IEEE Trans. Ind. Electron. 2016, 63, 7712–7722. [Google Scholar] [CrossRef]
- Zeng, X.; Liu, X.; Sun, H.; Qing, X. Prognosis of fatigue cracks in an aircraft wing using an adaptive tunable network and guided wave based structural health monitoring. Smart Mater. Struct. 2021, 30, 105025. [Google Scholar] [CrossRef]
- Dziendzikowski, M.; Niedbala, P.; Kurnyta, A.; Kowalczyk, K.; Dragan, K. Structural Health Monitoring of a Composite Panel Based on PZT Sensors and a Transfer Impedance Framework. Sensors 2018, 18, 1521. [Google Scholar] [CrossRef] [PubMed]
- Gao, D.; Wu, Z.; Yang, L.; Zheng, Y.; Yin, W. Structural health monitoring for long-term aircraft storage tanks under cryogenic temperature. Aerosp. Sci. Technol. 2019, 92, 881–891. [Google Scholar] [CrossRef]
- Canale, G.; Kinawy, M.; Maligno, A.; Sathujoda, P.; Citarella, R. Study of Mixed-Mode Cracking of Dovetail Root of an Aero-Engine Blade Like Structure. Appl. Sci. 2019, 9, 3825. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring: With Piezoelectric Wafer Active Sensors; Elsevier: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Chen, C.D.; Hsieh, C.H.; Liu, C.Y.; Huang, Y.H.; Wang, P.H.; Chien, R.D. Lamb Wave–Based Structural Health Monitoring for Aluminum Bolted Joints with Multiple-Site Fatigue Damage. J. Aerosp. Eng. 2022, 35, 04022101. [Google Scholar] [CrossRef]
- Alem, B.; Abedian, A. A semi-baseline damage identification approach for complex structures using energy ratio correction technique. Struct. Control. Health Monit. 2018, 25, e2103. [Google Scholar] [CrossRef]
- Ihn, J.B.; Chang, F.K. Detection and monitoring of hidden fatigue crack growth using a built-in piezoelectric sensor/actuator network: II. Validation using riveted joints and repair patches. Smart Mater. Struct. 2004, 13, 621. [Google Scholar] [CrossRef]
- He, J.; Guan, X.; Peng, T.; Liu, Y.; Saxena, A.; Celaya, J.; Goebel, K. A multi-feature integration method for fatigue crack detection and crack length estimation in riveted lap joints using Lamb waves. Smart Mater. Struct. 2013, 22, 105007. [Google Scholar] [CrossRef]
- Yang, J.; He, J.; Guan, X.; Wang, D.; Chen, H.; Zhang, W.; Liu, Y. A probabilistic crack size quantification method using in-situ Lamb wave test and Bayesian updating. Mech. Syst. Signal Proc. 2016, 78, 118–133. [Google Scholar] [CrossRef]
- Stolze, F.H.G.; Worden, K.; Manson, G.; Staszewski, W.J. Fatigue-Crack Detection in a Multi-Riveted Strap-Joint Aluminium Aircraft Panel Using Amplitude Characteristics of Diffuse Lamb Wave Field. Materials 2023, 16, 1619. [Google Scholar] [CrossRef] [PubMed]
- Asadi, S.; Khodaei, Z.S.; Aliabadi, M.H.; Tesch, A. A Baseline Free Methodology for Crack Detection in Metallic Bolted Joints. AIP Conf. Proc. 2023, 2848, 020038. [Google Scholar]
- Chen, J.; Wu, W.; Ren, Y.; Yuan, S. Fatigue crack evaluation with the guided wave–convolutional neural network ensemble and differential wavelet spectrogram. Sensors 2021, 22, 307. [Google Scholar] [CrossRef] [PubMed]
- Lissenden, C.J.; Cho, H.; Kim, C.S. Fatigue crack growth monitoring of an aluminum joint structure. AIP Conf. Proc. 2010, 1211, 1868–1875. [Google Scholar]
- Quaegebeur, N.; Ostiguy, P.C.; Masson, P. Correlation-based imaging technique for fatigue monitoring of riveted lap-joint structure. Smart Mater. Struct. 2014, 23, 055007. [Google Scholar] [CrossRef]
- Wandowski, T.; Malinowski, P.; Ostachowicz, W. Guided waves-based damage localization in riveted aircraft panel. In Health Monitoring of Structural and Biological Systems 2013; SPIE: San Diego, CA, USA, 2013. [Google Scholar]
- Bae, D.Y.; Lee, J.R. A health management technology for multisite cracks in an in-service aircraft fuselage based on multi-time-frame laser ultrasonic energy mapping and serially connected PZTs. Aerosp. Sci. Technol. 2016, 54, 114–121. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, W.; Chen, X.; Li, L.; Wang, K.; Wang, H.; Cui, F.; Su, Z. Modelling guided waves in acoustoelastic and complex waveguides: From SAFE theory to an open-source tool. Ultrasonics 2024, 136, 107144. [Google Scholar] [CrossRef]
- Liu, M.; Chen, S.; Wong, Z.; Yao, K.; Cui, F. In situ disbond detection in adhesive bonded multi-layer metallic joint using time-of-flight variation of guided wave. Ultrasonics 2020, 102, 106062. [Google Scholar] [CrossRef]
- Yan, J.; Jin, H.; Sun, H.; Qing, X. Active Monitoring of Fatigue Crack in the Weld Zone of Bogie Frames Using Ultrasonic Guided Waves. Sensors 2019, 19, 3372. [Google Scholar] [CrossRef]
- Wang, Y.; He, M.; Sun, L.; Wu, D.; Wang, Y.; Qin, X. Weighted adaptive Kalman filtering-based diverse information fusion for hole edge crack monitoring. Mech. Syst. Signal Proc. 2022, 167, 108534. [Google Scholar] [CrossRef]
- Rizvi, S.H.M.; Abbas, M. Lamb wave damage severity estimation using ensemble-based machine learning method with separate model network. Smart Mater. Struct. 2021, 30, 115016. [Google Scholar] [CrossRef]
- Hesser, D.F.; Kocur, G.K.; Markert, B. Active source localization in wave guides based on machine learning. Ultrasonics 2020, 106, 106144. [Google Scholar] [CrossRef] [PubMed]
- Ostachowicz, W.; Kudela, P.; Krawczuk, M.; Zak, A. Guided Waves in Structures for SHM: The Time-Domain Spectral Element Method; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- Prakash, R.U.; Kumar, G.R.; Vijayanandh, R.; Kumar, M.S.; Ramganesh, T. Structural analysis of aircraft fuselage splice joint. IOP Conf. Ser. Mater. Sci. Eng. 2016, 149, 012127. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S. On development of a multi-channel PZT array scanning system and its evaluating application on UAV wing box. Sens. Actuator A-Phys. 2009, 151, 220–230. [Google Scholar] [CrossRef]
- Sause, M.G.R.; Jasiūnienė, E. Structural Health Monitoring Damage Detection Systems for Aerospace; Springer Nature: Cham, Switzerland, 2021. [Google Scholar]
- Yang, X.; Xue, Z.; Zheng, H.; Qiu, L.; Xiong, K. Mechanic-electric-thermal directly coupling simulation method of lamb wave under temperature effect. Sensors 2022, 22, 6647. [Google Scholar] [CrossRef] [PubMed]
- Yuan, S.; Wang, H.; Chen, J. A PZT based on-line updated guided wave-gaussian process method for crack evaluation. IEEE Sens. J. 2019, 20, 8204–8212. [Google Scholar] [CrossRef]
- Ghannoum, M.; Abdelkhalek, L.; Assaad, J.J. Application of Stochastic Finite Element Modeling to Reinforced Lightweight Concrete Beams Containing Expanded Polystyrene Beads. Buildings 2023, 13, 2294. [Google Scholar] [CrossRef]
- Stein, M.L. Interpolation of Spatial Data: Some Theory for Kriging; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Fletcher, R.; Reeves, C.M. Function minimization by conjugate gradients. Comput. J. 1964, 7, 149–154. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specimens | Quantitatively Evaluation Error (mm) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 mm | 2 mm | 3 mm | 4 mm | 5 mm | 6 mm | 7 mm | 8 mm | 9 mm | 10 mm | |
| B-1 | 0.0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.7 | 1.0 | 1.5 | 2.1 |
| B-2 | 0.2 | 0.4 | 0.5 | 0.8 | 1.2 | 1.4 | 1.4 | 1.2 | 0.7 | 0.2 |
| B-3 | 0.3 | 0.5 | 0.7 | 0.8 | 0.9 | 0.7 | 0.3 | 0.3 | 1.2 | 2.2 |
| B-4 | 0.2 | 0.2 | 0.3 | 0.4 | 0.5 | 0.4 | 0.2 | 0.2 | 0.8 | 1.5 |
| B-5 | 0.3 | 0.6 | 0.8 | 1.2 | 1.6 | 1.8 | 1.7 | 1.3 | 0.7 | 0.1 |
| B-6 | 0.3 | 0.4 | 0.6 | 0.7 | 1.0 | 1.1 | 0.9 | 0.5 | 0.1 | 0.9 |
| B-7 | 0.3 | 0.6 | 0.9 | 1.3 | 1.6 | 1.8 | 1.9 | 1.9 | 2.0 | 2.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Xu, Y.; Yuan, S.; Qin, Z. Guided Wave Characteristic Research and Probabilistic Crack Evaluation in Complex Multi-Layer Stringer Splice Joint Structure. Sensors 2023, 23, 9224. https://doi.org/10.3390/s23229224
Chen J, Xu Y, Yuan S, Qin Z. Guided Wave Characteristic Research and Probabilistic Crack Evaluation in Complex Multi-Layer Stringer Splice Joint Structure. Sensors. 2023; 23(22):9224. https://doi.org/10.3390/s23229224
Chicago/Turabian StyleChen, Jian, Yusen Xu, Shenfang Yuan, and Zhen Qin. 2023. "Guided Wave Characteristic Research and Probabilistic Crack Evaluation in Complex Multi-Layer Stringer Splice Joint Structure" Sensors 23, no. 22: 9224. https://doi.org/10.3390/s23229224