
Smart Temperature Sensor Design and High-Density Water Temperature Monitoring in Estuarine and Coastal Areas
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. CMOS Technology and Operation of the TS-V1 Sensor
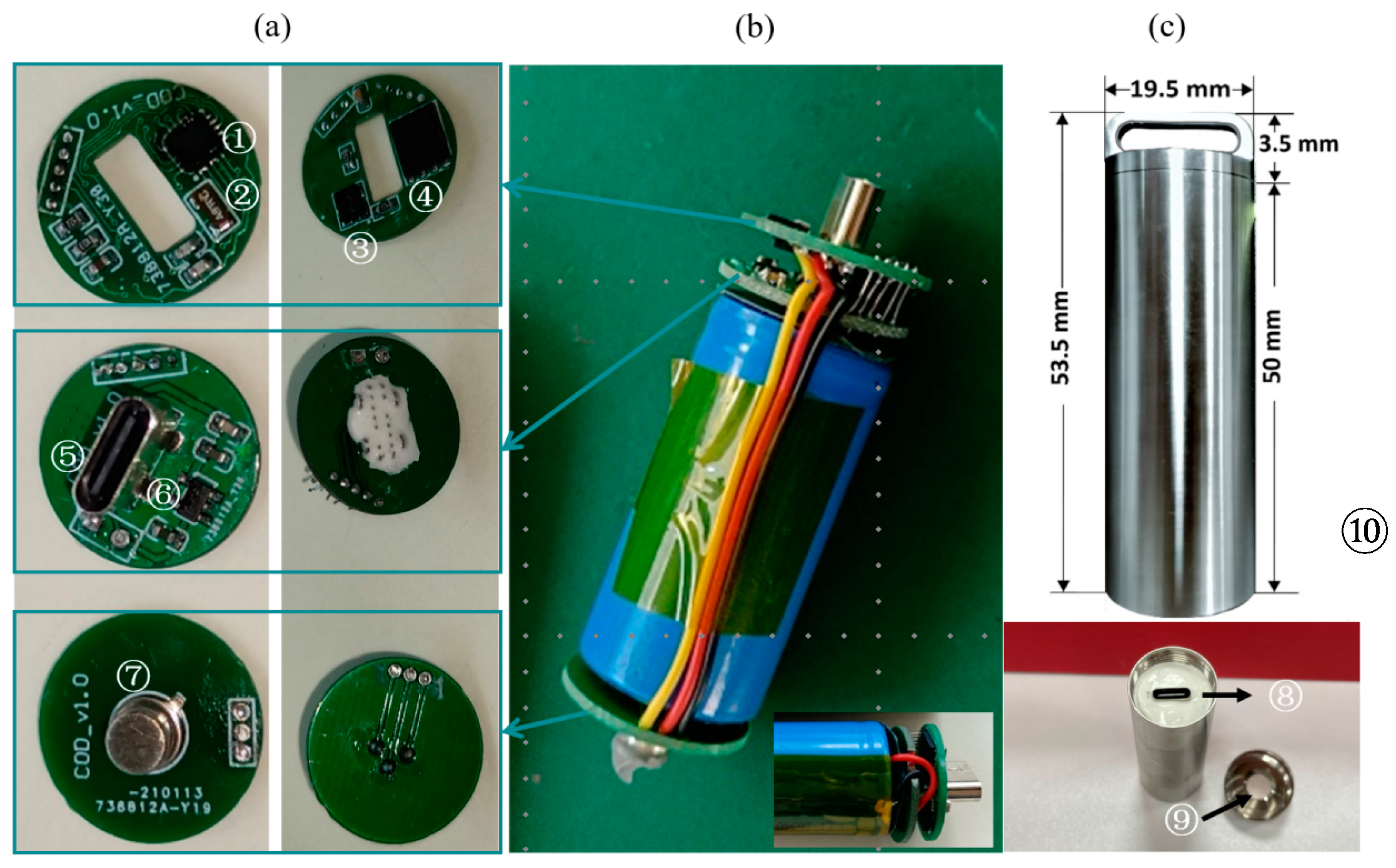
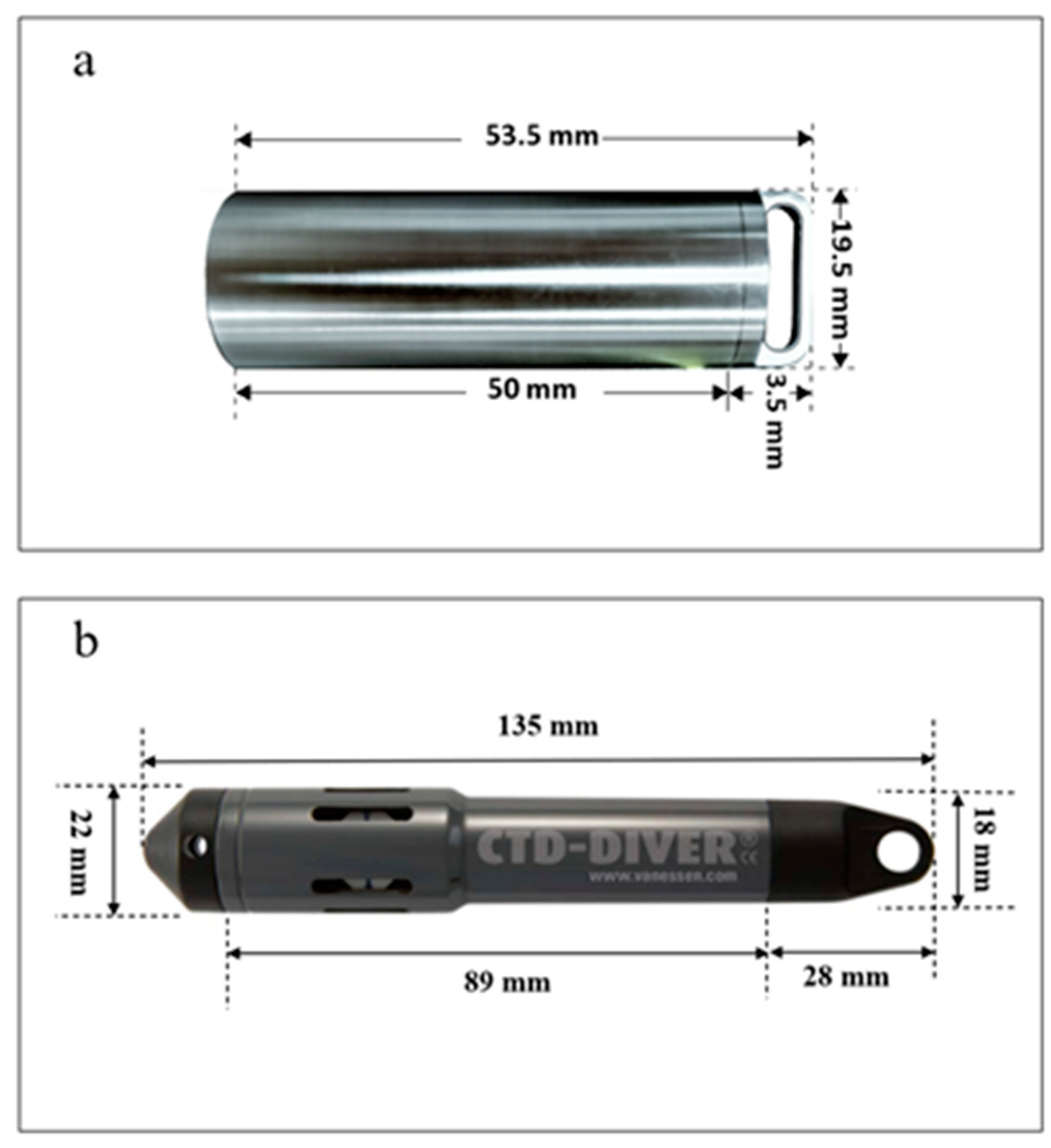
2.2. The Structure of the Smart Temperature Sensor
2.3. Experimental Design of Measurement Parameters and Deployment of the TS-V1 Sensor
2.4. Generalized Extreme Value (GEV) Distribution
3. Results and Discussion
3.1. Accuracy, Sensitivity, and Stability of the Smart Temperature Sensors
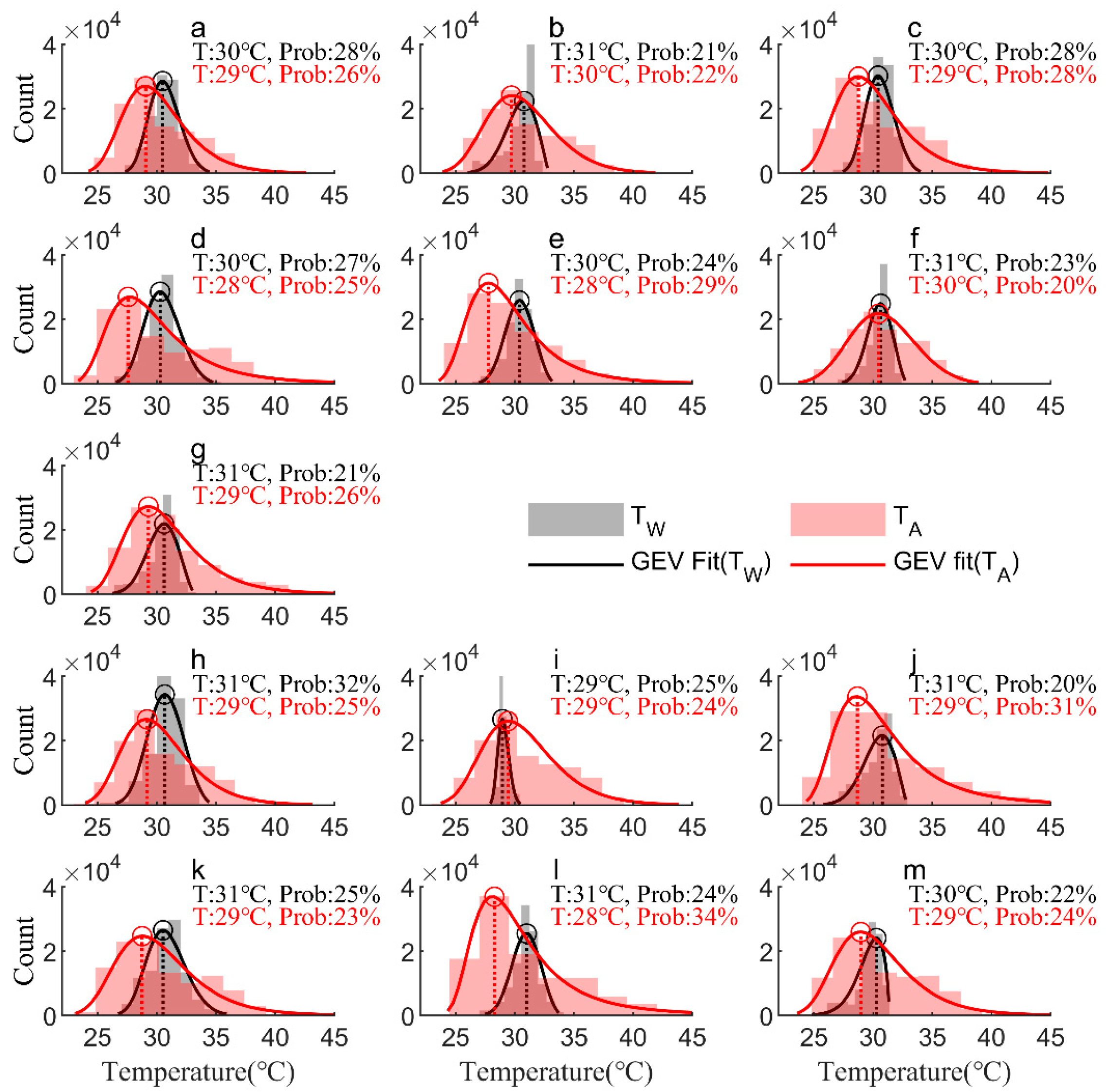
3.2. Long-Term and High-Density Monitoring of Water and Air Temperatures
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ralston, D.K.; Brosnahan, M.L.; Fox, S.E.; Lee, K.D.; Anderson, D.M. Temperature and Residence Time Controls on an Estuarine Harmful Algal Bloom: Modeling Hydrodynamics and Alexandrium Fundyense in Nauset Estuary. Estuaries Coasts 2015, 38, 2240–2258. [Google Scholar] [CrossRef]
- Jeffries, K.M.; Connon, R.E.; Davis, B.E.; Komoroske, L.M.; Britton, M.T.; Sommer, T.; Todgham, A.E.; Fangue, N.A. Effects of High Temperatures on Threatened Estuarine Fishes during Periods of Extreme Drought. J. Exp. Biol. 2016, 219, 1705–1716. [Google Scholar] [CrossRef]
- Miller, R.L. Modeling Response of Water Temperature to Channelization in a Coastal River Network. River Res. Appl. 2021, 37, 433–447. [Google Scholar] [CrossRef]
- Sapkota, S.; Paudyal, D.R. Growth Monitoring and Yield Estimation of Maize Plant Using Unmanned Aerial Vehicle (UAV) in a Hilly Region. Sensors 2023, 23, 5432. [Google Scholar] [CrossRef] [PubMed]
- Ampou, E.E.; Ouillon, S.; Iovan, C.; Andréfouët, S. Change Detection of Bunaken Island Coral Reefs Using 15 Years of Very High Resolution Satellite Images: A Kaleidoscope of Habitat Trajectories. Mar. Pollut. Bull. 2018, 131, 83–95. [Google Scholar] [CrossRef]
- Coimbra, K.T.O.; Alcântara, E.; De Souza Filho, C.R. Possible Contamination of the Abrolhos Reefs by Fundao Dam Tailings, Brazil—New Constraints Based on Satellite Data. Sci. Total Environ. 2020, 733, 138101. [Google Scholar] [CrossRef]
- Hendee, J.; Amornthammarong, N.; Gramer, L.; Gomez, A. A Novel Low-Cost, High-Precision Sea Temperature Sensor for Coral Reef Monitoring. Bull. Mar. Sci. 2020, 96, 97–110. [Google Scholar] [CrossRef]
- Wang, H.; Lin, M.; Ma, C.; Liu, J.; Guan, L. Validation of Sea Surface Temperature from HY-1D Data. In Proceedings of the 2021 Photonics & Electromagnetics Research Symposium (PIERS), Hangzhou, China, 21 November 2021. [Google Scholar]
- Gentemann, C.; Minnett, P.; Sienkiewicz, J.; DeMaria, M.; Cummings, J.; Jin, Y.; Doyle, J.; Gramer, L.; Barron, C.; Casey, K.; et al. The Multi-Sensor Improved Sea Surface Temperature (MISST) Project. Oceanography 2009, 22, 76–87. [Google Scholar] [CrossRef]
- Gramer, L.J. Dynamics of Sea Temperature Variability on Florida’s Reef Tract. Ph.D. Thesis, University of MIAMI, Coral Gables, FL, USA, August 2013. [Google Scholar]
- Wolf, S.L.; Swedberg, D.A.; Tanner, E.P.; Fuhlendorf, S.D.; Brewer, S.K. Using Fiber-Optic Distributed Temperature Sensing in Fisheries Applications: An Example from the Ozark Highlands. Fish. Res. 2023, 258, 106542. [Google Scholar] [CrossRef]
- Wanders, N.; Vliet, M.T.H.; Wada, Y.; Bierkens, M.F.P.; Beek, L.P.H. (Rens) High-Resolution Global Water Temperature Modeling. Water Resour. Res. 2019, 55, 2760–2778. [Google Scholar] [CrossRef]
- Ibrahim, D. Microcontroller Based Temperature Monitoring and Control; Elsevier: Amsterdam, The Netherlands, 2002; ISBN 978-0-7506-5556-9. [Google Scholar]
- Ueno, K.; Hirose, T.; Asai, T.; Amemiya, Y. Ultralow-Power Smart Temperature Sensor with Subthreshold CMOS Circuits. In Proceedings of the 2006 International Symposium on Intelligent Signal Processing and Communications, Tottori, Japan, 15 December 2006. [Google Scholar]
- Xin, H.; Andraud, M.; Baltus, P.; Cantatore, E.; Harpe, P. A 174 pW–488.3 nW 1 S/s–100 KS/s All-Dynamic Resistive Temperature Sensor with Speed/Resolution/Resistance Adaptability. IEEE Solid-State Circuits Lett. 2018, 1, 70–73. [Google Scholar] [CrossRef]
- Pan, S.; Makinwa, K.A.A. A 0.25 Mm 2-Resistor-Based Temperature Sensor with an Inaccuracy of 0.12 °C (3σ) from −55 °C to 125 °C. IEEE J. Soild-Stare Circuits 2018, 53, 3347–3355. [Google Scholar] [CrossRef]
- Pan, S.; Makinwa, K.A.A. 10.4 A Wheatstone Bridge Temperature Sensor with a Resolution FoM of 20fJ.K 2. In Proceedings of the 2019 IEEE International Solid-State Circuits Conference-(ISSCC), San Francisco, CA, USA, 17–21 February 2019. [Google Scholar]
- Santra, S.; Guha, P.K.; Ali, S.Z.; Haneef, I.; Udrea, F.; Gardner, J.W. SOI Diode Temperature Sensor Operated at Ultra High Temperatures—A Critical Analysis. In Proceedings of the 2008 IEEE Sensors, Lecce, Italy, 26–29 October 2008; IEEE: Lecce, Italy, 2008; pp. 78–81. [Google Scholar]
- Zhang, N.; Lin, C.-M.; Senesky, D.G.; Pisano, A.P. Temperature Sensor Based on 4H-Silicon Carbide Pn Diode Operational from 20 °C to 600 °C. Appl. Phys. Lett. 2014, 104, 073504. [Google Scholar] [CrossRef]
- Basov, M. Schottky Diode Temperature Sensor for Pressure Sensor. Sens. Actuators A Phys. 2021, 331, 112930. [Google Scholar] [CrossRef]
- Li, X.; Pu, T.; Li, X.; Li, L.; Ao, J.-P. Correlation Between Anode Area and Sensitivity for the TiN/GaN Schottky Barrier Diode Temperature Sensor. IEEE Trans. Electron. Devices 2020, 67, 1171–1175. [Google Scholar] [CrossRef]
- Xu, J.; Wang, X.; Cooper, K.L.; Pickrell, G.R.; Wang, A. Miniature Fiber Optic Pressure and Temperature Sensors; Marcus, M.A., Culshaw, B., Dakin, J.P., Eds.; SPIE: Boston, MA, USA, 2005; p. 600403. [Google Scholar]
- Fan, H.; Yin, Q.; Fan, H.; Lu, C. Graphene-Coated Three-Twisted-Taper and Four-Twisted-Taper for Highly Sensitive Temperature and Strain Sensing. IEEE Sens. J. 2023, 23, 4843–4848. [Google Scholar] [CrossRef]
- Pertijs, M.A.P.; Meijer, G.C.M.; Huijsing, J.H. Precision Temperature Measurement Using CMOS Substrate PNP Transistors. IEEE Sens. J. 2004, 4, 294–300. [Google Scholar] [CrossRef]
- Heidary, A.; Wang, G.; Makinwa, K.; Meijer, G. 12.8 A BJT-Based CMOS Temperature Sensor with a 3.6pJ*K2-Resolution FoM. In Proceedings of the 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 9–13 February 2014. [Google Scholar]
- Wang, G.; Heidari, A.; Makinwa, K.A.A.; Meijer, G.C.M. An Accurate BJT-Based CMOS Temperature Sensor with Duty-Cycle-Modulated Output. IEEE Trans. Ind. Electron. 2017, 64, 1572–1580. [Google Scholar] [CrossRef]
- Wang, H.; Mercier, P.P. Near-Zero-Power Temperature Sensing via Tunneling Currents Through Complementary Metal-Oxide-Semiconductor Transistors. Sci. Rep. 2017, 7, 4427. [Google Scholar] [CrossRef] [PubMed]
- Makinwa, K.; Pertijs, M. Smart Sensor Design: The Art of Compensation and Cancellation. In Proceedings of the 37th Eropean Solid Stade Device Research Conference 2007, Munich, Germany, 11–13 September 2007. [Google Scholar]
- CTD-Diver–Van Essen Instruments. Available online: https://www.vanessen.com/products/data-loggers/ctd-diver/ (accessed on 12 August 2023).
- Temperature Calibrator|Fluke 1551a Stik Thermometer|Fluke. Available online: https://www.fluke.com/en-us/product/calibration-tools/temperature-calibrators/fluke-calibration-1551a/ (accessed on 12 August 2023).
- Fisher, R.A.; Tippett, L.H.C. Limiting Forms of the Frequency Distribution of the Largest or Smallest Member of a Sample. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 1928; Volume 24, pp. 180–190. [Google Scholar]
- Gnedenko, B. Sur La Distribution Limite Du Terme Maximum D’Une Serie Aleatoire. Ann. Math. 1943, 44, 423. [Google Scholar] [CrossRef]
- Ansari Esfeh, M.; Kattan, L.; Lam, W.H.K.; Ansari Esfe, R.; Salari, M. Compound Generalized Extreme Value Distribution for Modeling the Effects of Monthly and Seasonal Variation on the Extreme Travel Delays for Vulnerability Analysis of Road Network. Transp. Res. Part C Emerg. Technol. 2020, 120, 102808. [Google Scholar] [CrossRef]
- Fourier, J.B.J. The Analytical Theory of Heat, 1st ed.; Cambridge University Press: Cambridge, UK, 2009; ISBN 978-1-108-00178-6. [Google Scholar]
- Meijer, G.C.M.; Wang, G.; Fruett, F. Temperature Sensors and Voltage References Implemented in CMOS Technology. IEEE Sens. J. 2001, 1, 225–234. [Google Scholar] [CrossRef]
- Pertijs, M.; Makinwa, K.; Huijsing, J. A Cmos Temperature Sensor with a 3σ Inaccuracy of //Sup +/Sub −//0.1 °C from −55 °C to 125 °C. In Proceedings of the 2005 International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 6–10 February 2005; 2005 IEEE International Digest of Technical Papers. IEEE: San Francisco, CA, USA, 2005; pp. 238–240. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Technological Indicators |
|---|---|
| High accuracy | 0.1 °C (−20 °C to 80 °C) |
| Extremely low noise | less than 0.001 °C |
| Wide temperature range | −45 °C to 130 °C (accuracy error maximum is 0.3 °C) |
| Wide supply voltage range | 2.7 V to 5.5 V |
| Ultra-low current | 60 µA active or 220 nA average |
| Parameters | M1 | M2 | M3 | M4 | M5 | M6 | M7 | J1 | J2 | J3 | H1 | H2 | H3 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| gWT | −0.22 | −0.47 | −0.23 | −0.23 | −0.32 | −0.38 | −0.41 | −0.30 | −0.19 | −0.48 | −0.19 | −0.33 | −0.63 |
| gAT | −0.04 | −0.11 | −0.01 | 0.13 | 0.09 | −0.22 | 0.03 | −0.05 | −0.07 | 0.16 | −0.02 | 0.21 | −0.02 |
| mWT | 30.18 | 30.04 | 30.12 | 29.91 | 29.97 | 30.17 | 30.00 | 30.20 | 28.87 | 29.99 | 30.21 | 30.54 | 29.35 |
| mAT | 28.91 | 29.45 | 28.69 | 28.06 | 27.99 | 29.79 | 29.34 | 28.97 | 29.27 | 28.99 | 28.71 | 28.59 | 28.87 |
| sWT | 1.22 | 1.33 | 1.15 | 1.43 | 1.17 | 1.04 | 1.32 | 1.45 | 0.42 | 1.37 | 1.53 | 1.17 | 1.26 |
| sAT | 2.38 | 2.65 | 2.51 | 2.81 | 2.54 | 2.61 | 2.66 | 2.54 | 2.74 | 2.86 | 2.90 | 2.73 | 2.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Cai, H.; Jia, Q.; Pan, H.; Li, B.; Fu, L. Smart Temperature Sensor Design and High-Density Water Temperature Monitoring in Estuarine and Coastal Areas. Sensors 2023, 23, 7659. https://doi.org/10.3390/s23177659
Wang B, Cai H, Jia Q, Pan H, Li B, Fu L. Smart Temperature Sensor Design and High-Density Water Temperature Monitoring in Estuarine and Coastal Areas. Sensors. 2023; 23(17):7659. https://doi.org/10.3390/s23177659
Chicago/Turabian StyleWang, Bozhi, Huayang Cai, Qi Jia, Huimin Pan, Bo Li, and Linxi Fu. 2023. "Smart Temperature Sensor Design and High-Density Water Temperature Monitoring in Estuarine and Coastal Areas" Sensors 23, no. 17: 7659. https://doi.org/10.3390/s23177659