1. Introduction
Nowadays, there are numerous methods for measuring human vital parameters. Broadly speaking, these methods can be classified as invasive and noninvasive. Invasive methods are primarily used in hospitals and exclusively by trained staff. This type of monitoring requires a specific controlled environment and incurs significant costs mainly due to the single-use equipment such as needles, wires, bandages, etc. Noninvasive measurements involve capturing the desired signal without breaking the skin tissue, making them safer for the patient’s health. However, the drawback of such measurements is the ease of signal distortion, which can result in uncertain or incorrect readings.
The variety of noninvasive methods is substantial. Human vital signs can be collected using wearable devices [
1], clothing (e.g., intelligent garments), or standalone touchless devices and systems embedded in household appliances [
2].
One dynamically developing method for touchless pulse measurement is videoplethysmography (VPG). It is based on the optical properties of blood tissues. The blood flow in the vessels causes skin color changes that are invisible to the human eye but detectable by electronic sensors. Light absorption in the blood depends, among other factors, on its oxygenation. The shift of the absorption spectrum maximum between oxygen-rich blood and blood with low oxygen content is distinct. This difference allows the heart rate to be determined from a series of images recorded with a standard video camera. In [
3], a video sequence was analyzed using the RGB color palette, and in [
4], the video was presented in grayscale. Proper lighting selection is important during VPG measurements to enhance the reliability of pulse results [
4].
To obtain more accurate results, various preprocessing and analysis methods have been investigated. A review of known and currently used methods is presented in [
5]. Most analyses are based on the RGB color palette (extracting the green component, calculating the green-red difference, or excess green). Another approach, unaffected by the color palette, employs independent component analysis [
3].
The motivation behind the proposed method for measuring physiological parameters is to enable health monitoring for individuals for whom measuring pulse through contact methods is not possible. Without challenging the performance of wearable on-skin devices, we demonstrate that measurements using non-contact sensors can expand the range of rapid triage to scenarios where wearables are impractical or infeasible. Non-contact monitoring becomes a unique option when providing medical supervision for individuals without accessible physical contact. For instance, utilizing in-flight VPG allows for remote assessment of accident victims’ conditions in scenarios such as disasters, terrorism, combat fields, mountain and potentially water rescues, where direct access is difficult, unsafe, or time-consuming, and the need for measurement was unforeseen. Victims of a mass accident will not all have wearable wristbands, and even if they do, connecting them poses additional challenges to address. In such cases, aerial VPG measurements with UAVs open the path for efficient, accurate, and speedy remote monitoring and triage. This principle also applies to the synchronous monitoring of multiple individuals in scenarios like running marathons, endurance trainings, or other mass events.
Our method aims to simultaneously track multiple individuals outdoors using UAVs. Field recording necessitates consideration of various factors (lighting, silhouette scale, movement type, unstable camera), introducing diverse challenges and research questions to address. The feasibility studies presented in this paper address the following research inquiries:
Is it feasible to reliably monitor the heart rate of a moving individual using a video sequence captured in-flight with a camera attached to a UAV?
How can we accurately track and identify different subjects in natural motion?
How should we handle scale variations in the human silhouette due to varying subject-to-sensor distances? When a person is away from the camera, his or her face occupies fewer pixels in the image, which reduces the signal-to-noise ratio.
By combining a silhouette detection algorithm based on deep neural networks (OpenPose [
6]) with a method for tracking multiple objects simultaneously [
7], we have developed the capability to identify facial and other body parts and monitor them over a sufficient duration to measure the pulse. Utilizing 4k resolution video largely mitigates the silhouette scale issue, as physiological information is represented across more skin pixels.
The main contributions of this article are as follows:
We present a method for measuring the pulse in individuals without a wearable pulse recorder and in the absence of direct contact.
We introduce a method for detecting and tracking people in videos recorded by a UAV-mounted camera.
We propose a method of skin area identification using a human pose estimation algorithm.
We conduct an evaluation of selected VPG-based heart rate estimation algorithms on videos from an unstable aerial camera.
2. Related Work
Studies conducted by [
8,
9] emphasize the significance of obtaining human vital parameters remotely. Ali Al-Naji et al. in [
8] utilized a UAV to record one-minute videos of each participant at a resolution of 1920 × 1080 and a frame rate of 60 frames per second. For analysis, they considered the last 30 seconds of each recording. Heart and breath rates were determined using the iPPG signal from the face. In the first scenario, the participant’s face remained motionless; in the second scenario, the participant had to make various facial expressions and rotate their head; finally, in the third scenario, the measured person spoke. None of these scenarios appear to justify the use of a UAV. The algorithms studied in this paper were Complete Ensemble Empirical Mode Decomposition with Adaptive Noise (CEEMDAN) and Canonical Correlation Analysis (CCA). Despite the application of advanced methods, the obtained results were similar to those from well-known Independent Component Analysis and Principal Component Analysis.
The footage recorded using a UAV was the subject of research in [
9]. The authors analyzed the heart rate rPPG signal from the participants’ faces. The videos were recorded for 30 seconds, and the volunteers remained seated and motionless. CHROM [
10] and POS [
11] methods were employed for HR detection. The average RMSE was high (14.3 bpm), rendering the results unsuitable for health surveillance practice. This article also addresses the challenge of active image stabilization during video recording. In contrast to experiments involving immobilized subjects, the authors assert that stabilizing the UAV-mounted camera is crucial, especially in mountain rescue operations due to frequent changes in wind and weather conditions. The authors posit that integrating a three-axis gimbal with the UAV could enhance the accuracy of acquisition and signal-to-noise ratio.
In addition to HR measurements, there have been attempts to read respiratory rates based on UAV recordings. In [
12], the video was synchronized with cardiorespiratory activities using reference devices such as pulse oximeters and piezoelectric breathing belts. Due to the high influence of noise in the VPG signal, the authors utilized methods like full decomposition in empirical modes with adaptive noise (CEEMDAN) and canonical correlation analysis (CCA), among others. A study involving 15 healthy volunteers demonstrated that the results obtained from the proposed method were superior to those from Independent Component Analysis (ICA) and Principal Component Analysis (PCA).
Machine learning was also employed in VPG measurements. In [
13], the authors proposed an end-to-end video transformer architecture called PhysFormer for remote physiological measurement. This architecture primarily comprises a video temporal difference transformer backbone. The transformer architecture [
14], initially proposed for modeling sequential data in the field of natural language processing (NLP), was adapted to incorporate the vision transformer (ViT) [
15], which was recently introduced for image classification. According to the authors, this architecture can effectively model the long-range spatio-temporal relationships required for reliable rPPG measurement. Experiments were conducted for three types of physiological signals: heart rate (HR), heart rate variability (HRV), and respiration frequency (RF). Four benchmark datasets were employed: VIPL-HR [
16], MAHNOB-HCI [
17], MMSE-HR [
18], and OBF [
19]. These databases predominantly consist of face videos captured in various conditions.
The authors of [
20] proposed a convolutional neural network denoted as HR-CNN for estimating the heart rate of a subject in a video sequence. The network’s input was a sequence of cropped images containing the subject’s face (192 × 128 resolution), and the output was the predicted heart rate value. The network comprises two components. The first component (extractor) was trained on the PURE database [
21], while the second component (HR estimator) was trained on different databases separately. The evaluation databases (MAHANOB [
17], COHFACE [
22], and ECG-Fitness dataset collected by the authors of the article) primarily consist of videos recorded in indoor environments.
In [
23], the authors present a novel convolutional attention network (DeepPhys) that simultaneously learns a spatial mask to detect the appropriate regions of interest and recover the heart rate and respiration signals. The architecture of the proposed network consists of two parts based on a VGG-style convolutional neural network (CNN), which shares the spatial masks. The current video frame and the normalized difference between frames are provided as inputs to the appearance and motion models of this network. The input images were cropped to include subjects’ faces (with resolutions ranging from 130 × 130 to 492 × 492 pixels). The authors tested the proposed method on four datasets, including two RGB datasets collected during experiments, one infrared dataset, and the MAHANOB-HCI [
17] dataset. The dataset used by the authors comprises videos recorded in a controlled studio setup and an indoor environment.
Article [
24] presents an on-device optical cardiopulmonary vital sign measurement approach using multi-task temporal shift convolutional attention network (MTTS-CAN). It leverages the previous work of the authors [
23] but extends it to include temporal dependencies beyond consecutive frames using different architecture of the convolutional network (Hybrid-CAN). Moreover, the proposed solution can work in real time. Authors evaluate their system on two large public datasets: AFRL [
25] and MMSE-HR [
18]. Datasets used in evaluation consists of videos recorded in controlled indoor lighting environment.
All methods based on deep networks ([
13,
20,
23,
24]) have been trained on videos containing a single person in a controlled indoor environment (though with various lighting and movement conditions). These methods either assume an image containing only the face in the right proportions as input for deep networks or require the use of a separate face detector. Additionally, most of these approaches require a method of training deep networks (transfer learning) to adapt them to a different video database. Incorporating them into our framework would necessitate significant modifications to these algorithms. Therefore, they are not included in this manuscript.
VPG measurements are based on the analysis of changes in skin color due to heartbeats and breathing. An important aspect of these measurements is the difference in skin tones caused by variations in the ethnic origin of the subjects. In [
26], the differences in results obtained from the study of Caucasians (with fair skin), Mongolians, and individuals of African descent (with darker complexions) were analyzed. The analysis employed a PCA-based algorithm for five color spaces: red channel, green channel, red chrominance channel, RGB color space, and RG color space. Based on the research, it was determined that the amount of melanin in the skin alters light absorption by the skin, thereby affecting the measurement results. For individuals with fair complexions, an analysis based on the green channel is recommended, while for those with darker skin tones, the optimal color is red. Acknowledging this, our study analyzed results obtained from volunteers with consistent skin tones, and thus no differentiation was applied in the analysis.
3. Methods
3.1. Video Recording
The video was recorded outdoors with a camera attached to a three-axis gimbal on a UAV (DJI Mavic Air 2, maximum take-off weight 570 g). The camera resolution was 4K Ultra HD (i.e., 3840 × 2160 pixels). A licensed UAV operator maneuvered the aircraft to maintain a height of approximately 2.5 m at a distance of 5 to 7 m from the volunteer, ensuring that the camera captured the person being measured. The volunteer faced the front of the aircraft, where the camera was mounted. As the volunteer attempted to approach, the aircraft moved backward to maintain the set distance. Initially, the volunteer walked and then gradually transitioned to running, attempting to keep up with the UAV. A Polar H10 single-lead ECG-based chestband served as a wearable reference heart rate sensor. The time from the video and the chestband was synchronized to validate the accuracy of heart rate estimation from the video.
There are several papers related to the validity of the Polar H10 device. For example, the Polar white paper [
27]. Additionally, according to [
28], the HRV measurements derived from the Polar H10 chest strap device demonstrate strong agreement and a small bias when compared with ECG recordings, making it a recommended choice for practitioners.
All participants were healthy (none had chronic diseases that would pose risks during the measurement). Before the measurement, they familiarized themselves with the procedure and completed the necessary documentation. Informed consent was obtained from all human subjects. Participants were instructed to move at their own comfortable rhythm and speed, and they were not exposed to any stressful conditions. The device used for collecting the ground truth pulse rate was battery-powered and commercially available for personal use.
During the measurement, the size of the human pose changed due to inevitable variations in distance between the human and the UAV. A smaller human pose size resulted in a lower signal-to-noise ratio. Regions where the skin was visible consisted of a small number of pixels. To mitigate this issue and maintain a safe distance between the aircraft and the human, the footage in this study was recorded in 4K resolution.
3.2. Overview of the Algorithm
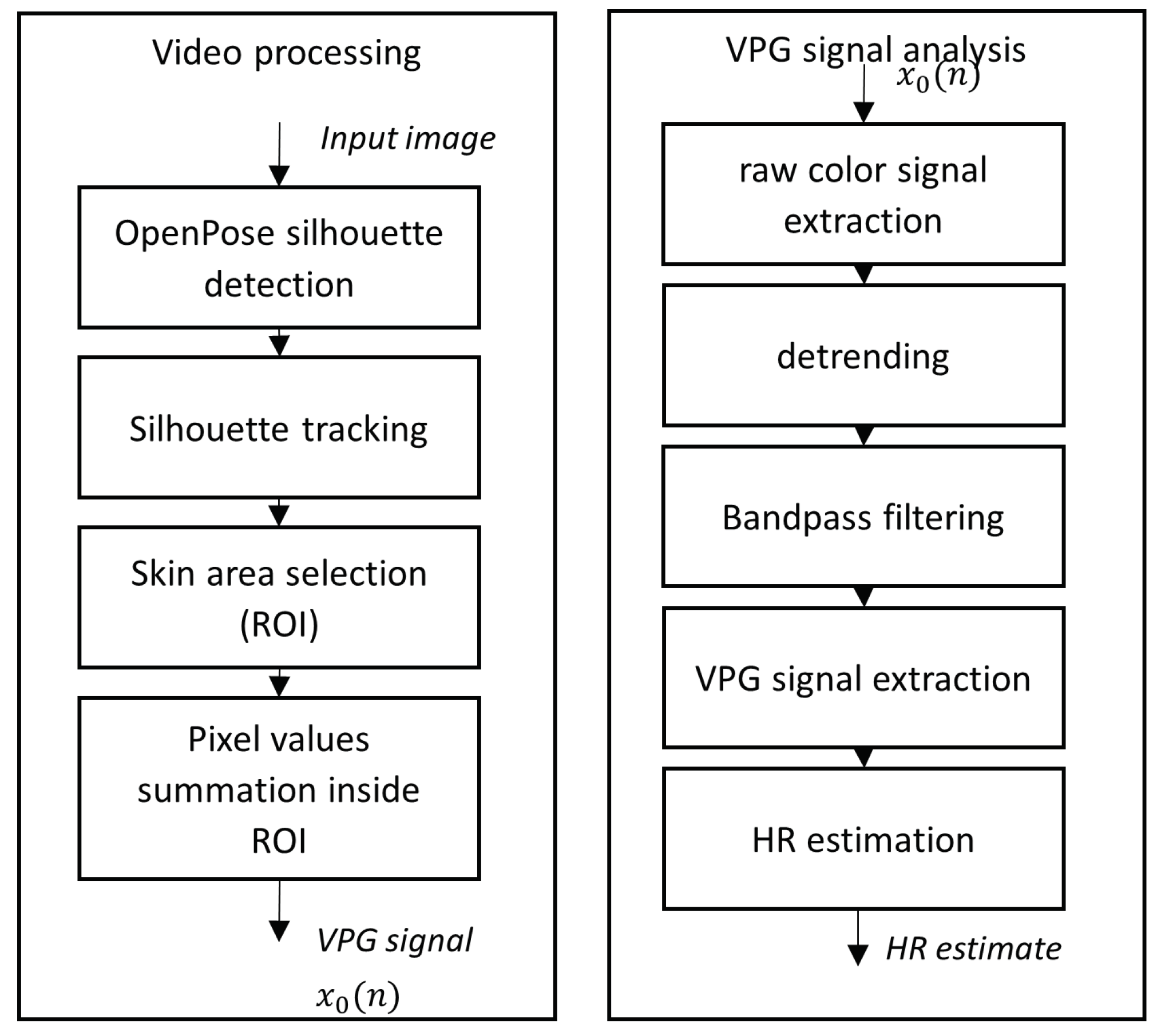
An illustration of the architecture of the proposed method is presented in
Figure 1.
The data processing was carried out in two stages. In the first method, the input video underwent analysis using image processing techniques: (1) area of interest tracking and (2) skin area detection to extract the videoplethysmographic signal. To ascertain the face or forearm positions, the OpenPose [
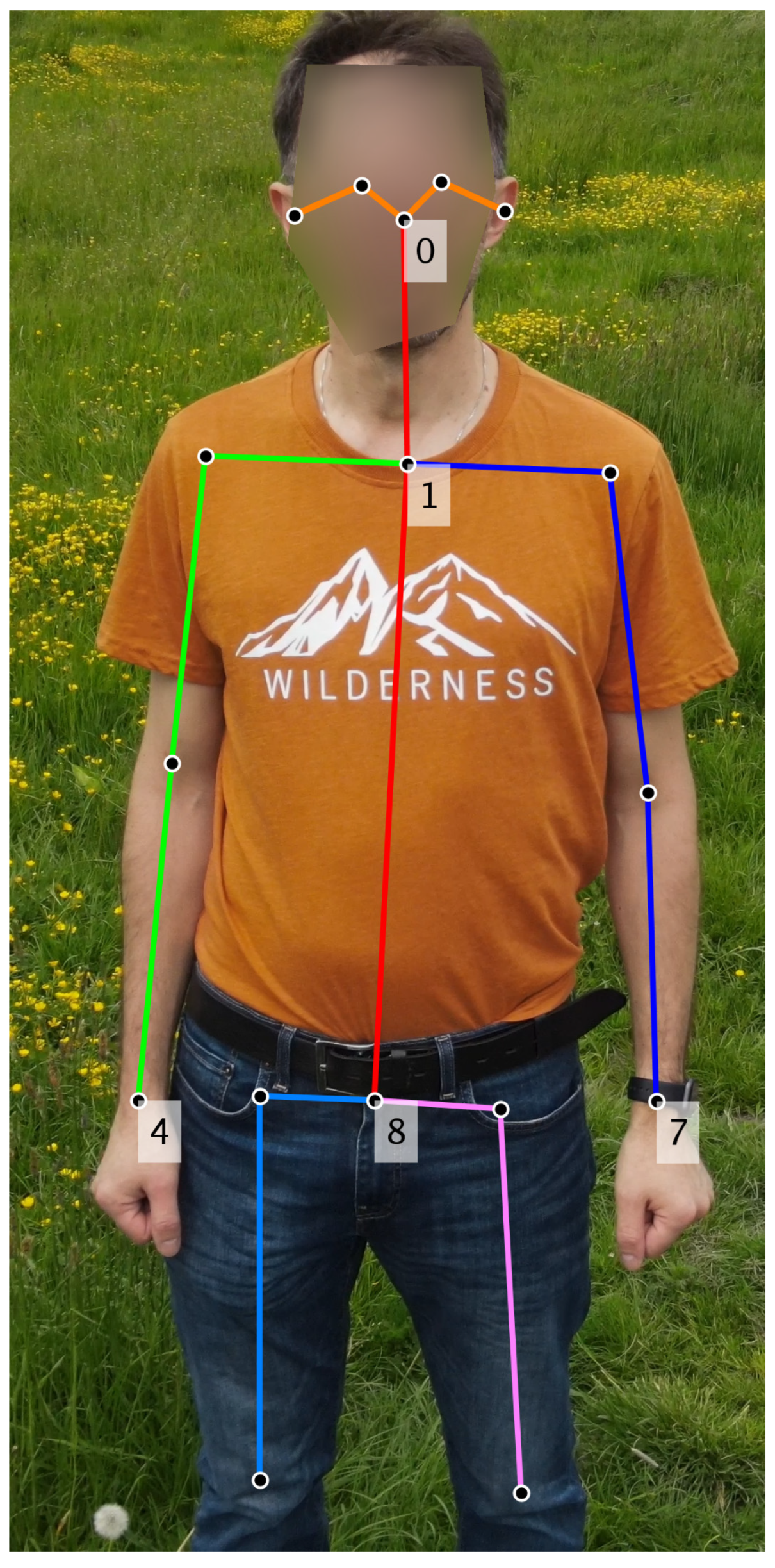
6] algorithm was initially employed to identify points on the human silhouette. Subsequently, based on the positions of these selected points (depicted in
Figure 2), the area of interest (ROI) was defined. Finally, within the selected ROI, the sum of pixels for each RGB component of the image was computed. In scenarios involving monitoring two participants simultaneously, proper indexing of the detected individuals was essential to prevent mismatching their heart rates. For this purpose, the multi-object tracking algorithm [
7] was utilized. The average location of selected points on the silhouette was assumed as the center of the tracked object.
Using the results of tracking the silhouette in the source video sequences, the sequences were segmented into fragments containing only one accurately detected silhouette from those visible in the image. Further analysis was solely conducted on fragments that met a minimum length criterion (i.e., no shorter than the FFT transform used in the subsequent step). For each video frame n within these video fragments, the sum of pixels calculated in the areas of interest constituted a raw color videoplethysmographic signal sample denoted as . This signal was subsequently processed in the second stage of analysis.
The second stage of analysis aimed to estimate the pulse from the
signal and is detailed in
Section 3.4.
3.3. Area of Interest Tracking
During the motion in the camera’s field of view, the position of the volunteer was constantly changing, due to the movement of both the human and the UAV. In the recorded video sequence, it was necessary to track the human pose. For this purpose, the OpenPose algorithm [
6] was applied.
Utilizing the experimentally determined parameters, the pose was correctly detected and tracked using OpenPose BODY_25 model. The posture was detected based on points representing the head, abdomen and hands (see
Figure 2). The primary challenge involved tracking a single posture without any significant points transitioning beyond the region of interest, such as onto another human or into the background. To address this issue, an algorithm was implemented to identify exceptional distance values between points of the posture in two consecutive video frames or the disappearance of a crucial posture point. In such situations, the detected pose was considered lost, and the process was restarted by initiating a new search for the human pose.
Another challenge in analyzing human poses was the lack of indexing of detected positions. When two people were recorded simultaneously, a simple algorithm may randomly mismatch their labels. To fix this problem, a multiple object tracking technique and the Kalman filter were used [
7]. Both methods are conceived for tracking and indexing objects based on their last known location. The prediction is most precise for constant velocity or acceleration of the measured object. The speed of volunteers can be approximated to be constant or in some cases—slowly growing. The multiple object tracking algorithm was run with following options:
prediction method: Kalman constant velocity filter,
detection to track cost functions and elimination of unlikely matches: detection to track cost function, representing the cost of an unassigned track or detection (distance between track and detection position) was set to 20 pixels,
assign detections to track: Munkres variant of the Hungarian bipartite matching algorithm was used,
track management: tracks that have been invisible for too many consecutive frames (>5) were deleted, and recently created tracks that have been invisible for too many frames (>2) were deleted.
3.4. Skin Area Detection
The detection of skin area posed a challenge due to the rapid camera shakes. Initially, the algorithm had to track the human posture and subsequently, based on the contour, segment skin regions—specifically, the face and arms—that were suitable for VPG analysis. The OpenPose algorithm met these requirements and was employed for this purpose.
After extracting the human posture from the video, the exposed skin areas were identified. The areas where most skin was anticipated included the face and both forearms. An approximate circle was employed to represent the face contour, while rectangles were used for approximating the forearm regions. The size of these regions of interest (ROI) was determined as a percentage of the pose dimensions. An example of the detected skin regions is illustrated in
Figure 3.
3.5. Heart Rate Estimation
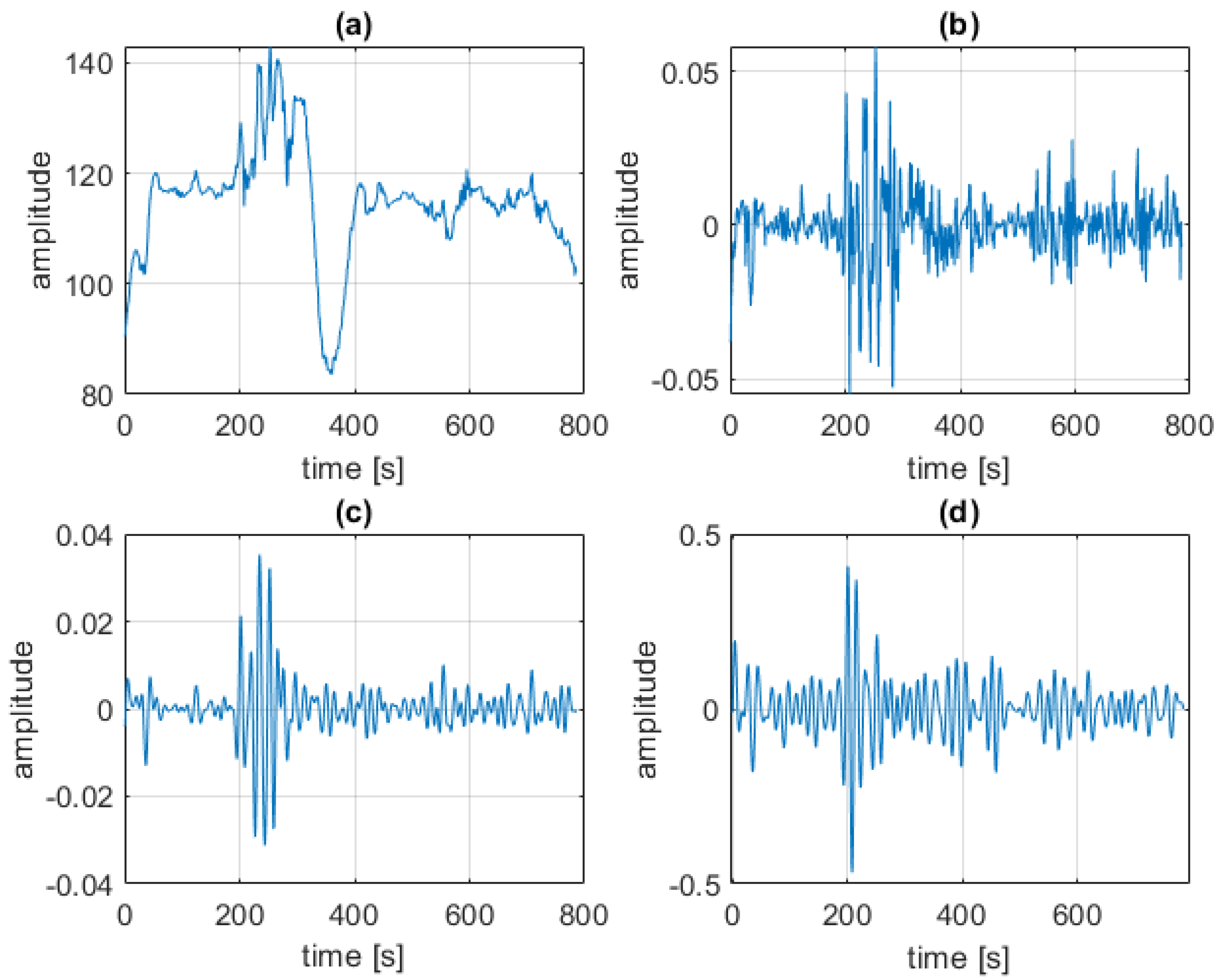
After segmenting the skin regions, the skin color in these areas was analyzed in each consecutive image from the sequence according to the VPG paradigm using the following steps (refer to
Figure 1):
Extracting the raw color signal by summing pixel values inside regions of interest (ROI)—the face or forearms.
Detrending using an algorithm based on mean centering with scaling (MCwS) [
8].
Signal filtering with a bandpass filter in the range of plausible pulse values (40–180 bpm).
Interpreting color variation in consecutive frames as a VPG signal using five selected alternative methods: green channel (G), green-red difference (GR), excess green (ExG) [
5], independent component analysis (ICA) [
3], and a plane orthogonal to the skin (POS) [
11].
Normalizing and filtering the pulse signal.
Calculating the heart rate using the periodogram power spectral density estimate.
The following algorithm parameters were used:
MCwS detrending window length: 0.4 s (i.e., 12 frames for 30 frames per s (fps) video),
bandpass filter: order = 32, lower cutoff frequency = 0.75 Hz (45 bpm), upper cutoff frequency = 3.0 Hz (180 bpm),
heart rate estimation using periodogram power spectral density estimate: FFT length = 512 datapoints (i.e., 17.07 s of video at 30 fps).
Sample results from each step of video processing are shown in
Figure 4.
4. Results
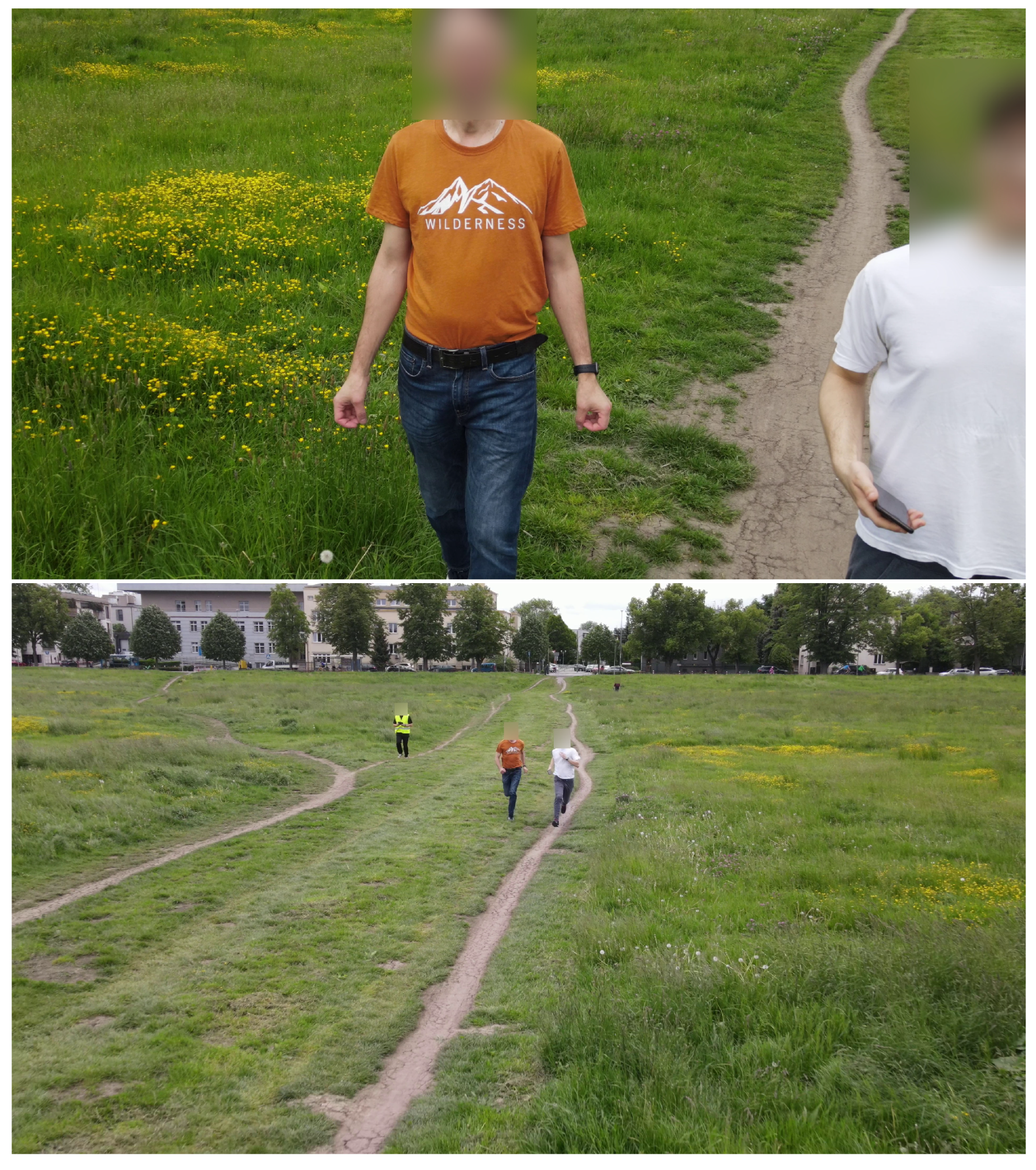
Ten video clips of varying lengths, ranging from 3 min and 25 s to 4 min and 50 s, were recorded. The recordings were captured on both sunny and cloudy days at a city meadow park. Consequently, alongside the study participants, random silhouettes of other individuals are also present, justifying the implementation of a multi-person tracking algorithm. The total number of participants in the study was seven, although some individuals were recorded multiple times. Participants were instructed to either take a short walk or run along a designated path. The UAV operator made efforts to keep the moving participants within the camera’s field of view, although this was not always feasible. As a result, the size of the silhouettes in the recordings exhibited significant variation (refer to
Figure 5).
Since participants did not consistently appear in the recordings, it became necessary to utilize not only a silhouette detection algorithm (OpenPose) but also to track multiple individuals simultaneously. Following this stage, the source videos were divided into shorter sequences so that the examined person appeared in all frames. As a result, a regularly sampled discrete videoplethysmographic signal could be obtained. All video fragments were manually reviewed and verified by a human expert in terms of the correctness of silhouette detection. Depending on the FFT length used, a minimum of 512 frames were required. Therefore, for further analysis, only the fragments of sufficient length for determining the pulse were retained. For the selected FFT length, the blood pulse frequency resolution equals Hz (equivalent to 3.5156 bpm). The resulting number of usable video fragments was 32.
For each video fragment, a VPG signal was formed using the algorithm described in
Section 3.5 (involving pixel summation in the skin areas, detrending, filtering, VPG signal extraction, heart rate estimation). A summary of all detection results for individual fragments and VPG extraction methods is included in
Appendix A.
The performance of the proposed method is measured using difference metrics between the VPG-calculated pulse and the ground truth (gt) captured with the reference wearable recorder. The mean value of systematic error and standard deviation (SD) of the differences, along with 95% limits of agreement (±1.96 SD), and root mean squared error (RMSE, in accordance with Equation (
1)) were calculated for the estimated heart rates from all video segments using all selected VPG algorithms. When comparing the accuracy of the pulse rate measured from various areas, the region of interest (ROI) selected on the head skin area yields smaller errors than the two forearms. RMSE errors for respective VPG color spaces are compared in
Table 1.
where
K—number of video fragments.
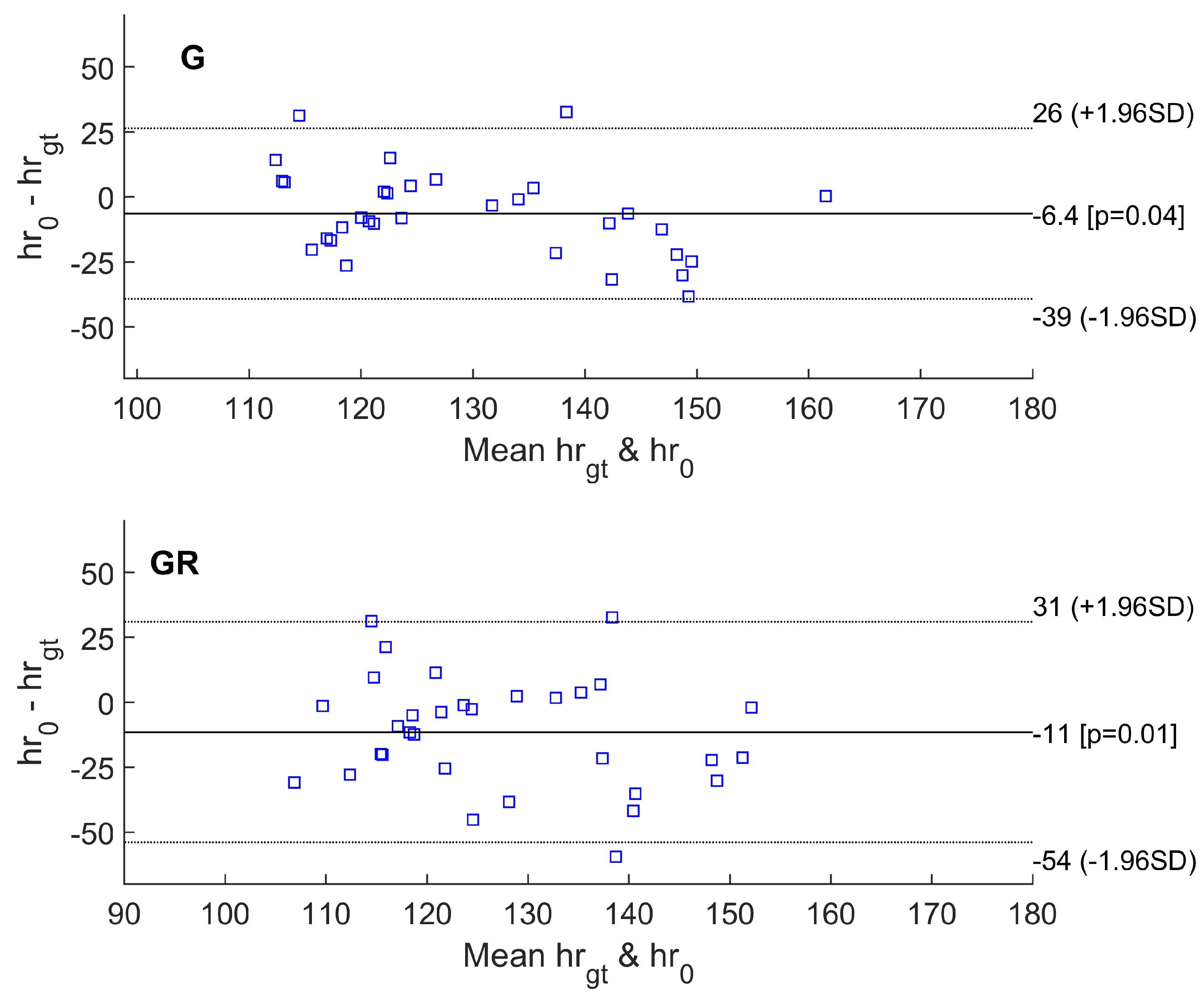
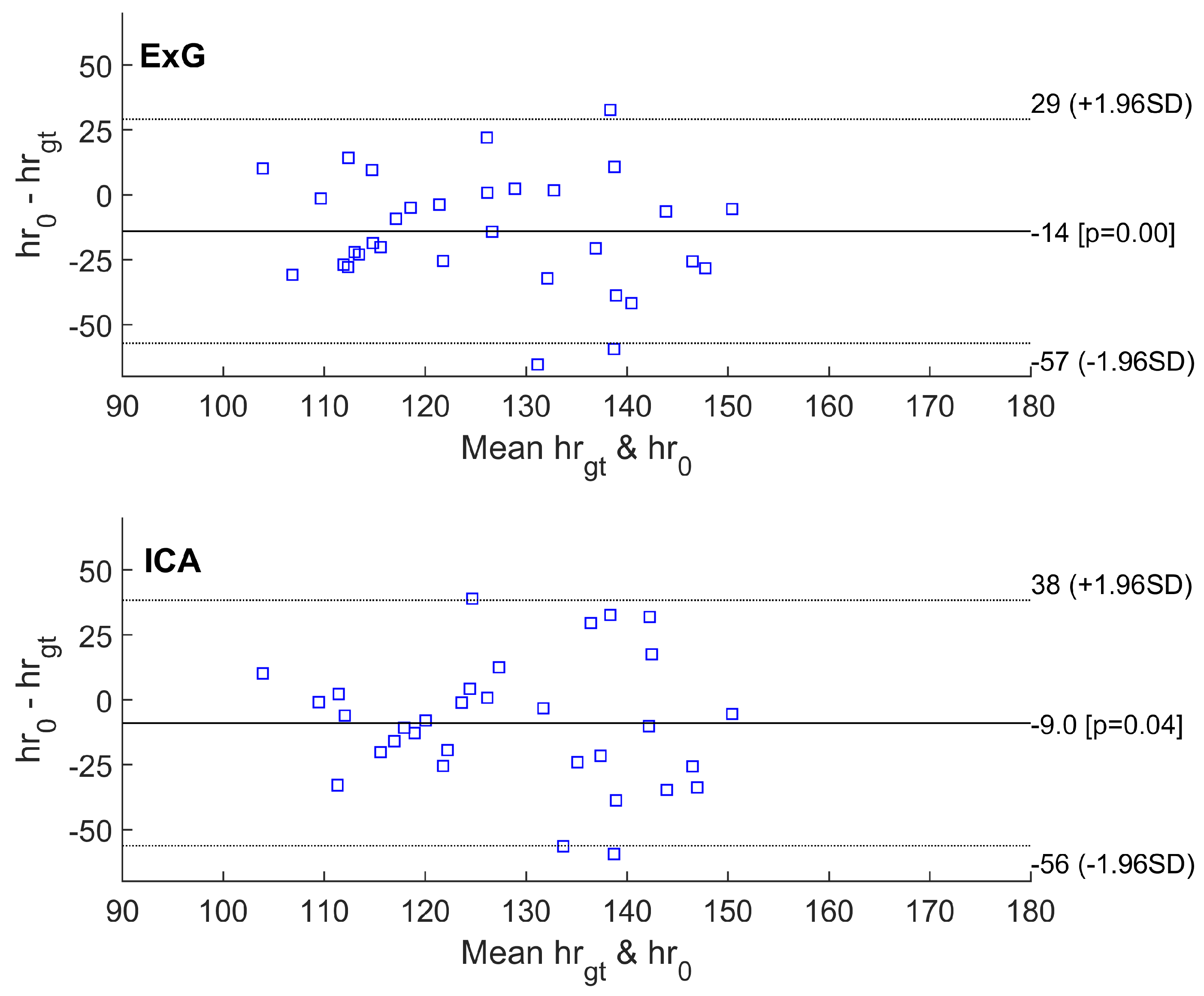
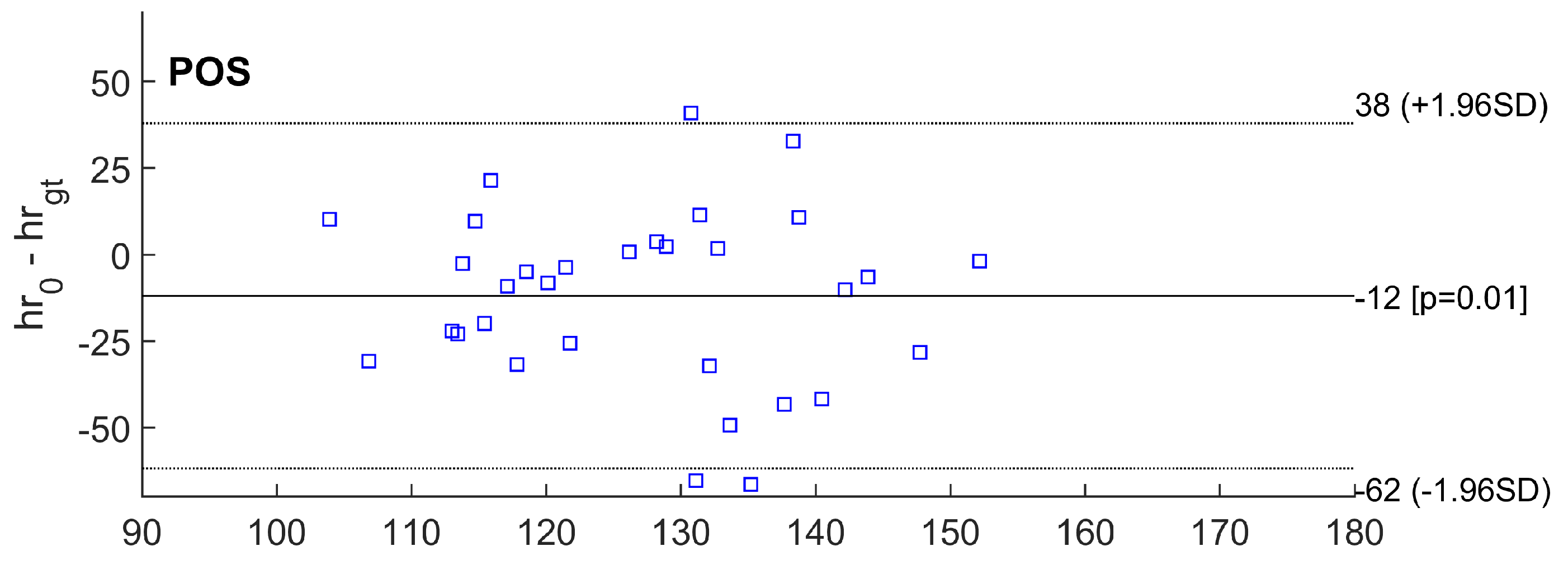
Other statistics are shown on Bland–Altman plots (
Figure 6,
Figure 7 and
Figure 8). The abbreviations used in the figures are as follows:
The Bland–Altman plots showed the lowest mean bias of −6.4 bpm for the basic G method. Most values fell within the range between a lower limit of −39 bpm and an upper limit of +26 bpm in the 95% confidence interval.
Similarly, the smallest RMSE error was achieved for the simplest algorithm based on the analysis of the green channel (G). For 14 out of 32 video sequences, at least one of the tested methods exhibited an error smaller than the FFT resolution (approximately 3.5 bpm). For the G and GR methods, an error of less than 3.5 bpm occurred for six video fragments. For the ICA and POS algorithms, an error of less than 3.5 bpm occurred for five video fragments. For the ExG method, the fewest sequences had an error of less than 3.5 bpm.
5. Discussion
The advantage of using a camera mounted on a UAV to monitor human pulse is primarily the flexibility of such a solution. Depending on the needs, it is possible to monitor various scenarios, such as athletes during exercise, individuals injured in challenging conditions (in mountainous areas), or elderly people moving in public spaces. Importantly, this measurement method is contactless and does not require the use of pre-prepared wearables or diagnostic devices. The utilization of human pose estimation algorithms enables the identification of skin areas crucial for pulse measurement. In the same equipment setup, it is also possible to monitor a person’s movement patterns, providing insights into conditions like musculoskeletal diseases.
The OpenPose algorithm allows for real-time multi-person 2D pose estimation from images. Ablation studies were conducted by the authors of the original algorithm [
6], comparing their approach with several other methods. In cases where one silhouette obscures another or when silhouettes are close to each other, we observed that some shape points may be covered or assigned to the wrong person. This issue was partially addressed with an algorithm that detects significant differences in the distances between posture points in two adjacent video frames (as described in
Section 3.3). To mitigate this problem in future studies, we suggest considering more recent multiple object tracking algorithms that can handle such cases. When participants were not present in the recordings throughout the entire duration, it was necessary to divide the source videos into smaller fragments (with a minimum number of frames set to FFT length) to ensure that the examined person appears in all frames and HR measurement is possible (
Section 4). Interpolation of missing samples of the pulse wave is worth considering in future works.
Furthermore, our aim includes extracting VPG information from different body parts, thereby enabling the estimation of other cardiovascular parameters such as pulse transient time.
As for the accuracy of the measurement of physiological parameters, the conducted research reveals the need for further data analysis and identification of sources of interference possibly affecting the result. Large discrepancies in the results of individual pulse estimation methods may originate from the influence of different sources. Different estimation methods are sensitive to disparate types of disruption. Confirmation of this hypothesis, however, requires further research.
Based on the results of previous research published in [
4], it can be concluded that one of the sources of errors is high compression of the image during the capturing process (H264, MPEG-4 AVC, part 10 codec, bitrate = 103332 kb/s, yuv420p). At the frame size of 3840 × 1920 pixels and a speed of 30 fps, the bitrate only allows for 0.416 bits per pixel representation (equivalent to a compression ratio of nearly 20 times when compared to a standard 8-bit dynamic resolution). To mitigate this issue, faster data carriers, smaller frames, or lower frame rates were necessary. Unfortunately, the first solution is costly and unique to ensure minimal impact on video quality.
Another potential source of measurement errors may be the incorrect separation of the skin area. In some video sequences, it was observed that determining the skin area as a circular contour, based on the distance of the detected body shape points, led to the inclusion of pixels from neighboring background areas. A possible direction for improvement could be the utilization of semantic segmentation algorithms for identifying skin pixels.
Another research and engineering challenge to address is how to process image data in real-time. Embedded systems that can be placed on a drone typically have limited computing power due to weight and battery power constraints. Therefore, using overly complex calculation methods raises performance concerns. Fortunately, HR estimation methods such as G, ExG, ICA, and POS are not computationally demanding. The OpenPose method, despite being based on deep networks, can operate in real time. According to the authors, the inference time of the OpenPose algorithm is invariant to the number of people in the image. However, the following question arises: can it be executed on an embedded system mounted on a UAV? Another potential solution for processing real-time video data is transmitting the data over a wireless network to a computer with adequate computing power. However, this approach necessitates addressing the effective transmission of a substantial amount of data (4k video) with minimal compression (to avoid loss of signal quality).
Also, in this paper we did not conduct research on the impact of illumination conditions on measurement accuracy. The measurement conditions outside were variable (sunny days, cloudy days). The study of the influence of lighting on the measurement was carried out in our previous work [
4].
6. Conclusions
Based on the results of the present study and the studies [
8,
9], the feasibility and reliability of measuring human vital parameters using UAV-mounted sensors are confirmed. This research area is particularly important for scenarios involving difficult access to the person being measured (e.g., traffic accidents and mountain rescues). The remote assessment of a victim’s condition justifies prompt assistance and expedites the triage procedure. With the use of the human pose tracking proposed in this manuscript, there is a possibility to measure more than one victim simultaneously.
While conducting measurements and data analysis, the following challenges had arisen: (1) high image compression (which causes errors in the analyzed signal), (2) obstacles in real-time data transmission (due to large file sizes), (3) limited access to computational power and energy supply in the case of analysis performed by an embedded system operating in-flight. The possibility to eliminate difficulties with wireless data sending requires further research (for example, evaluating the use of the 5G network). Further research should be focused on more efficient human pose detection, real-time measurements, and assessment of dependencies on weather conditions (such as the presence of clouds, wind, etc.).
An important direction for future research will also involve adapting and evaluating other pulse detection algorithms, including HR-CNN [
20], DeepPhys [
23], TS-CAN [
24], and PhysFormer [
13].
In future research, the use of deep network skin detection is also planned. This network can detect and track measurement areas checked in the first frame. During preliminary tests, the method proposed in [
29] shows better results than ours in skin regions delineation and tracking due to the use of accurate free shape-based approximation of body areas instead of our simple geometrical figures: the face modeled with a circle and forearms with rectangles.
Author Contributions
Conceptualization, J.P. and A.P.; methodology, J.P. and P.A.; software, J.P.; validation, J.P. and A.P.; formal analysis, J.P.; investigation, J.P. and A.P.; resources, J.P.; data curation, A.P. and J.P.; writing—original draft preparation, A.P.; writing—review and editing, A.P., J.P. and P.A.; visualization, J.P.; supervision, J.P.; project administration, P.A.; funding acquisition, P.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by AGH University of Krakow in 2022 and 2023 as research project No. 16.16.120.773.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
Not applicable.
Acknowledgments
The authors acknowledge the support from Magdalena Podsiadło in organizing the experiment and the volunteers’ recruitment among her fellow students. The UAV was operated by one of the authors (P.A.) in accordance to the UAV pilot certificate for A2 open sub-category no. POL-RP94d2037cc82c valid till 29 September 2026.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Summary of Results for All Video Fragments and VPG Extraction Algorithms
Summary of all detection results for individual fragments and VPG extraction methods. Labels used in the table columns are:
video no.—number of continuous video strip
person id—identifier of the volunteer
numframes—number of consecutive video frames in the strip
—ground truth heart rate from PolarH10 device,
—absolute error,
Table A1.
Summary of all detection results for individual fragments and VPG extraction methods.
Table A1.
Summary of all detection results for individual fragments and VPG extraction methods.
| Video No. | Person Id | Numframes | [bpm] | [bpm] |
|---|
| G | GR | ExG | ICA | POS |
| video 1, part 1 | male0 | 785 | 124.2 | 11.7 | 1.1 | 18.7 | 1.1 | 8.1 |
| video 1, part 2 | male1 | 575 | 122.3 | 4.3 | 30.9 | 30.9 | 4.3 | 30.9 |
| video 1, part 3 | male0 | 674 | 121.7 | 1.4 | 9.2 | 9.2 | 29.5 | 9.2 |
| video 1, part 4 | male1 | 768 | 125.4 | 9.4 | 19.9 | 26.9 | 12.9 | 19.9 |
| video 1, part 5 | male0 | 1406 | 124.0 | 8.0 | 11.5 | 22.1 | 8.0 | 22.1 |
| video 1, part 6 | male1 | 622 | 121.1 | 2.0 | 5.0 | 5.0 | 12.5 | 5.0 |
| video 1, part 7 | male0 | 652 | 124.9 | 15.9 | 12.4 | 23.0 | 15.9 | 23.0 |
| video 1, part 9 | male1 | 898 | 126.3 | 10.3 | 27.9 | 27.9 | 31.9 | 3.8 |
| video 2, part 1 | male1 | 655 | 115.1 | 15.0 | 11.5 | 22.0 | 6.1 | 2.6 |
| video 2, part 2 | male0 | 524 | 125.8 | 20.3 | 2.7 | 0.8 | 0.8 | 0.8 |
| video 2, part 6 | male0 | 522 | 123.3 | 6.8 | 3.8 | 3.8 | 10.8 | 3.8 |
| video 3, part 1 | female1 | 538 | 105.2 | 14.3 | 21.3 | 14.3 | 38.9 | 21.3 |
| video 3, part 2 | female1 | 1641 | 134.5 | 1.0 | 25.6 | 25.6 | 25.6 | 25.6 |
| video 3, part 3 | female1 | 616 | 127.7 | 8.2 | 2.4 | 2.4 | 32.8 | 2.4 |
| video 4, part 1 | female1 | 1576 | 133.4 | 3.3 | 3.7 | 10.8 | 3.3 | 10.8 |
| video 4, part 2 | female1 | 1266 | 159.3 | 22.2 | 22.2 | 25.7 | 25.7 | 43.3 |
| video 5, part 1 | female2 | 1306 | 131.9 | 26.4 | 1.7 | 1.7 | 19.4 | 1.7 |
| video 5, part 2 | female2 | 1250 | 161.9 | 24.8 | 21.3 | 28.3 | 56.4 | 28.3 |
| video 6, part 1 | male2 | 2928 | 110.3 | 5.7 | 1.4 | 1.4 | 2.2 | 40.8 |
| video 6, part 2 | male2 | 1751 | 133.7 | 3.4 | 6.9 | 14.2 | 17.5 | 31.8 |
| video 6, part 3 | male2 | 1054 | 163.8 | 30.2 | 30.2 | 65.4 | 33.7 | 65.4 |
| video 7, part 1 | male2 | 1215 | 148.2 | 21.6 | 21.6 | 32.2 | 21.6 | 32.2 |
| video 7, part 2 | male2 | 2700 | 147.2 | 10.1 | 38.3 | 20.7 | 10.1 | 10.1 |
| video 8, part 1 | male3 | 2943 | 122.0 | 32.7 | 32.7 | 32.7 | 32.7 | 32.7 |
| video 8, part 2 | male3 | 2144 | 147.1 | 6.5 | 45.2 | 6.5 | 24.1 | 6.5 |
| video 8, part 3 | male3 | 1083 | 161.3 | 0.4 | 41.8 | 41.8 | 34.8 | 41.8 |
| video 9, part 1 | male4 | 1384 | 98.9 | 31.2 | 31.2 | 10.1 | 10.1 | 10.1 |
| video 9, part 2 | male4 | 5330 | 125.7 | 16.7 | 20.2 | 20.2 | 20.2 | 11.5 |
| video 10, part 2 | female2 | 1991 | 153.1 | 12.5 | 2.0 | 5.5 | 5.5 | 2.0 |
| video 10, part 3 | female2 | 1753 | 158.3 | 31.7 | 35.2 | 38.7 | 38.7 | 49.3 |
| video 10, part 4 | female2 | 1756 | 168.4 | 38.4 | 59.5 | 59.5 | 59.5 | 66.5 |
| video 10, part 5 | female2 | 866 | 109.9 | 6.1 | 9.6 | 9.6 | 0.9 | 9.6 |
References
- Augustyniak, P.; Smolen, M.; Mikrut, Z.; Kantoch, E. Seamless Tracing of Human Behavior Using Complementary Wearable and House-Embedded Sensors. Sensors 2014, 14, 7831–7856. [Google Scholar] [CrossRef] [PubMed]
- Augustyniak, P.; Kantoch, E. Turning Domestic Appliances Into a Sensor Network for Monitoring of Activities of Daily Living. J. Med. Imaging Health Inform. 2015, 5, 1662–1667. [Google Scholar] [CrossRef]
- Poh, M.Z.; McDuff, D.J.; Picard, R.W. Non-contact, automated cardiac pulse measurements using video imaging and blind source separation. Opt. Express 2010, 18, 10762–10774. [Google Scholar] [CrossRef] [PubMed]
- Przybyło, J.; Kańtoch, E.; Jabłoński, M.; Augustyniak, P. Distant measurements of plethysmographic signal in various lighting conditions using configurable frame-rate camera. Metrol. Meas. Syst. 2016, 23, 579–592. [Google Scholar] [CrossRef]
- Przybyło, J. Continuous Distant Measurement of the User’s Heart Rate in Human-Computer Interaction Applications. Sensors 2019, 19, 4205. [Google Scholar] [CrossRef] [PubMed]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.; Sheikh, Y. OpenPose: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields. arXiv 2018, arXiv:1812.08008. [Google Scholar] [CrossRef] [PubMed]
- Available online: https://www.mathworks.com/help/vision/ug/multiple-objecttracking.html (accessed on 29 April 2023).
- Wang, W.; den Brinker, A.C.; Stuijk, S.; de Haan, G. Robust heart rate from fitness videos. Physiol. Meas. 2017, 38, 1023. [Google Scholar] [CrossRef] [PubMed]
- Mösch, L.; Barz, I.; Müller, A.; Pereira, C.B.; Moormann, D.; Czaplik, M.; Follmann, A. For Heart Rate Assessments from Drone Footage in Disaster Scenarios. Bioengineering 2023, 10, 336. [Google Scholar] [CrossRef] [PubMed]
- de Haan, G.; Jeanne, V. Robust Pulse Rate From Chrominance-Based rPPG. IEEE Trans. Biomed. Eng. 2013, 60, 2878–2886. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; den Brinker, A.C.; Stuijk, S.; de Haan, G. Algorithmic Principles of Remote PPG. IEEE Trans. Biomed. Eng. 2017, 64, 1479–1491. [Google Scholar] [CrossRef] [PubMed]
- Al-Naji, A.; Perera, A.G.; Chahl, J. Remote monitoring of cardiorespiratory signals from a hovering unmanned aerial vehicle. Biomed. Eng. Online 2017, 16, 1–20. [Google Scholar] [CrossRef] [PubMed]
- Yu, Z.; Shen, Y.; Shi, J.; Zhao, H.; Torr, P.H.; Zhao, G. PhysFormer: Facial video-based physiological measurement with temporal difference transformer. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 19–20 June 2022; pp. 4186–4196. [Google Scholar]
- Lin, T.; Wang, Y.; Liu, X.; Qiu, X. A Survey of Transformers. AI Open 2021, 3, 111–132. [Google Scholar] [CrossRef]
- Kolesnikov, A.; Dosovitskiy, A.; Weissenborn, D.; Heigold, G.; Uszkoreit, J.; Beyer, L.; Minderer, M.; Dehghani, M.; Houlsby, N.; Gelly, S.; et al. An Image is Worth 16 × 16 Words: Transformers for Image Recognition at Scale. arXiv 2021, arXiv:2010.11929. [Google Scholar]
- Niu, X.; Shan, S.; Han, H.; Chen, X. RhythmNet: End-to-End Heart Rate Estimation From Face via Spatial-Temporal Representation. IEEE Trans. Image Process. 2019, 29, 2409–2423. [Google Scholar] [CrossRef] [PubMed]
- Soleymani, M.; Lichtenauer, J.; Pun, T.; Pantic, M. A Multimodal Database for Affect Recognition and Implicit Tagging. IEEE Trans. Affect. Comput. 2012, 3, 42–55. [Google Scholar] [CrossRef]
- Zhang, Z.; Girard, J.; Wu, Y.; Zhang, X.; Liu, P.; Ciftci, U.; Canavan, S.; Reale, M.; Horowitz, A.; Yang, H.; et al. Multimodal Spontaneous Emotion Corpus for Human Behavior Analysis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 2016; pp. 3438–3446. [Google Scholar] [CrossRef]
- Li, X.; Alikhani, I.; Shi, J.; Seppanen, T.; Junttila, J.; Majamaa-Voltti, K.; Tulppo, M.; Zhao, G. The OBF Database: A Large Face Video Database for Remote Physiological Signal Measurement and Atrial Fibrillation Detection. In Proceedings of the 13th IEEE International Conference on Automatic Face & Gesture Recognition (FG 2018), Xi’an, China, 15–19 May 2018; pp. 242–249. [Google Scholar] [CrossRef]
- Špetlík, R.; Franc, V.; Matas, J. Visual heart rate estimation with convolutional neural network. In Proceedings of the British Machine Vision Conference, Newcastle, UK, 3–6 September 2018; pp. 3–6. [Google Scholar]
- Stricker, R.; Müller, S.; Gross, H.M. Non-contact video-based pulse rate measurement on a mobile service robot. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, 25–29 August 2014; pp. 1056–1062. [Google Scholar] [CrossRef]
- Heusch, G.; Anjos, A.; Marcel, S. A Reproducible Study on Remote Heart Rate Measurement. arXiv 2017, arXiv:1709.00962. [Google Scholar]
- Chen, W.; McDuff, D. Deepphys: Video-based physiological measurement using convolutional attention networks. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 349–365. [Google Scholar]
- Liu, X.; Fromm, J.; Patel, S.; McDuff, D. Multi-task temporal shift attention networks for on-device contactless vitals measurement. Adv. Neural Inf. Process. Syst. 2020, 33, 19400–19411. [Google Scholar]
- Estepp, J.R.; Blackford, E.B.; Meier, C.M. Recovering pulse rate during motion artifact with a multi-imager array for non-contact imaging photoplethysmography. In Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, 5–8 October 2014; pp. 1462–1469. [Google Scholar] [CrossRef]
- Królak, A. Influence of skin tone on efficiency of vision-based heart rate estimation. In Proceedings of the Recent Developments and Achievements in Biocybernetics and Biomedical Engineering: Proceedings of the 20th Polish Conference on Biocybernetics and Biomedical Engineering, Kraków, Poland, 20–22 September 2017; pp. 44–55. [Google Scholar]
- Available online: https://www.polar.com/en/img/static/whitepapers/pdf/polar-h10-heart-rate-sensor-whitepaper.pdf/ (accessed on 24 July 2023).
- Schaffarczyk, M.; Rogers, B.; Reer, R.; Gronwald, T. Validity of the polar H10 sensor for heart rate variability analysis during resting state and incremental exercise in recreational men and women. Sensors 2022, 22, 6536. [Google Scholar] [CrossRef] [PubMed]
- Topiwala, A.; Al-Zogbi, L.; Fleiter, T.; Krieger, A. Adaptation and Evaluation of Deep Leaning Techniques for Skin Segmentation on Novel Abdominal Dataset. In Proceedings of the 2019 IEEE 19th International Conference on Bioinformatics and Bioengineering (BIBE), IEEE, Athens, Greece, 28–30 October 2019; pp. 752–759. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







