
Colorimetric Characterization of Color Imaging System Based on Kernel Partial Least Squares

Abstract
:1. Introduction
2. Theory and Method
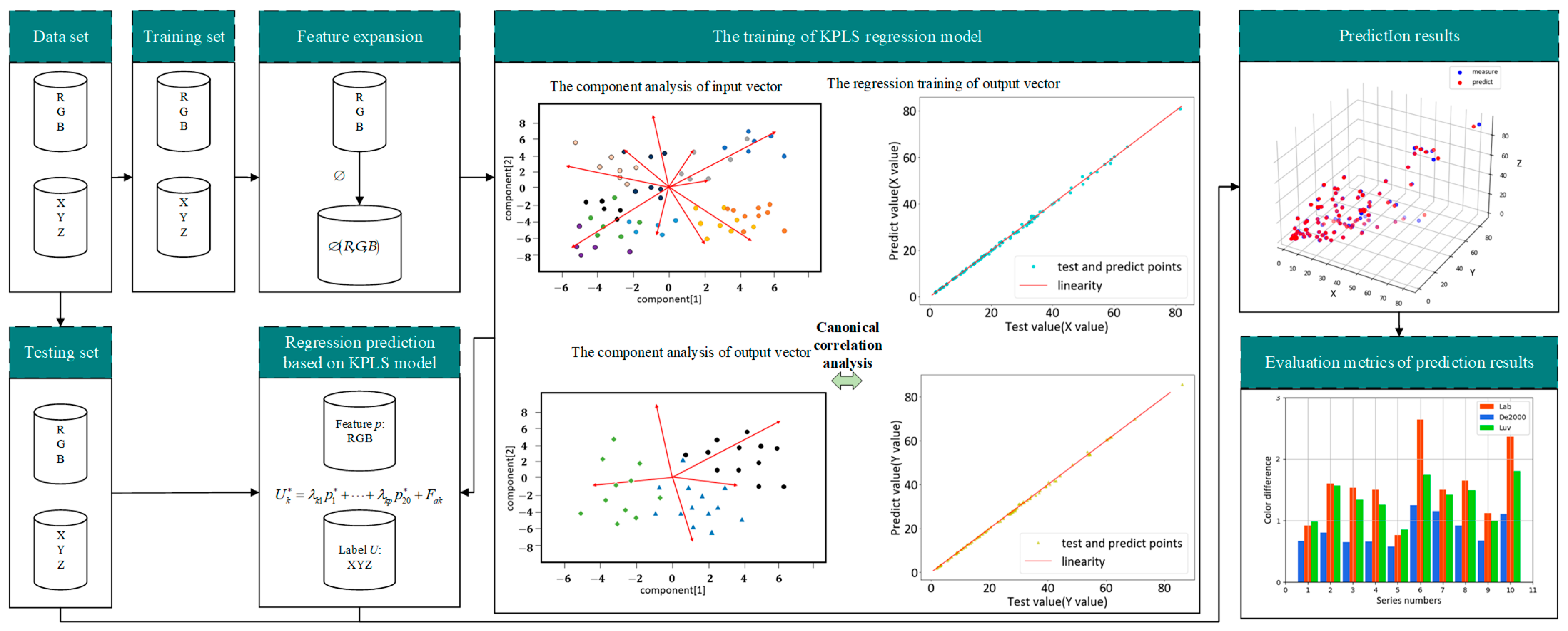
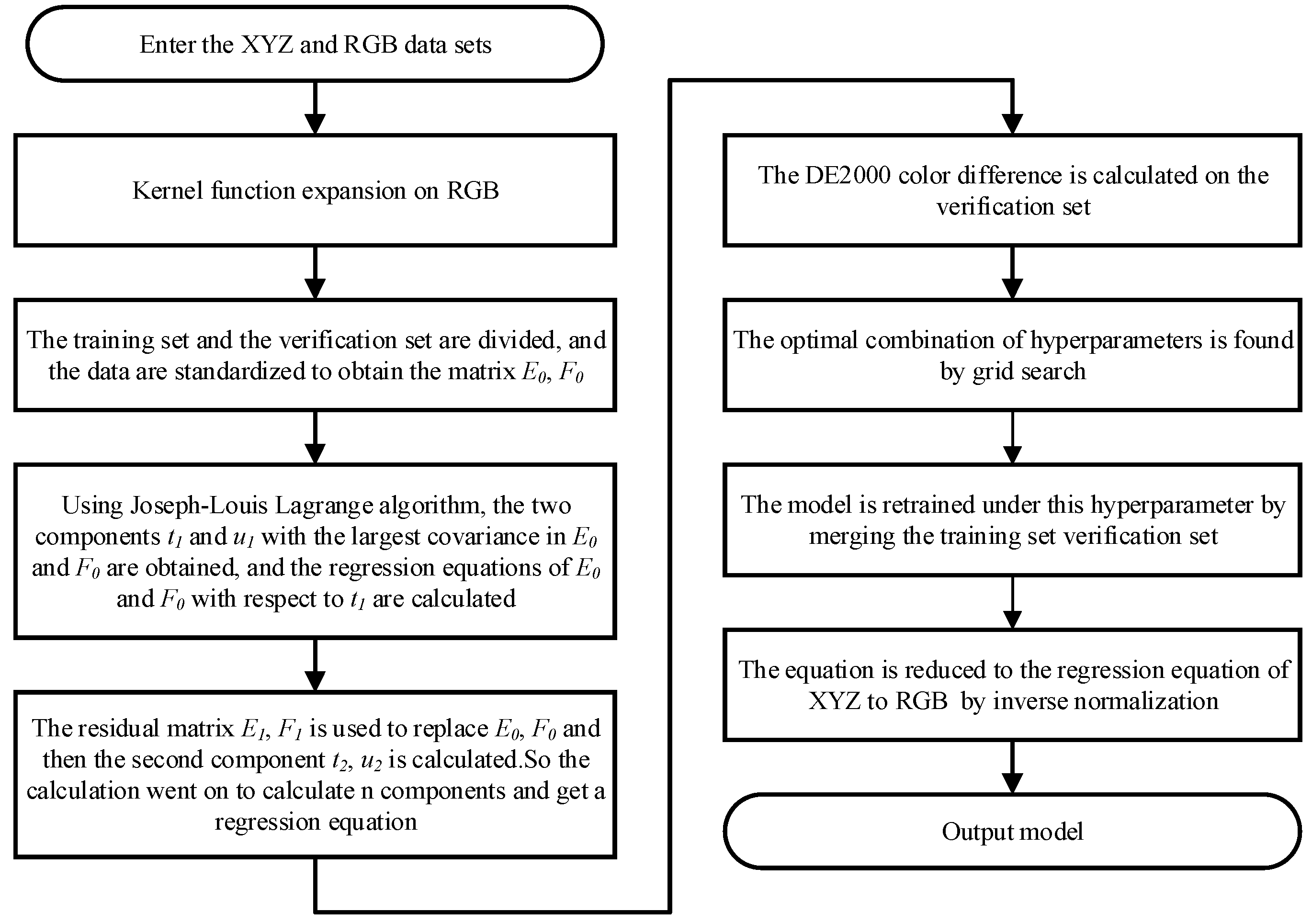
2.1. Colorimetric Characterization of Color Imaging System Based on KPLS
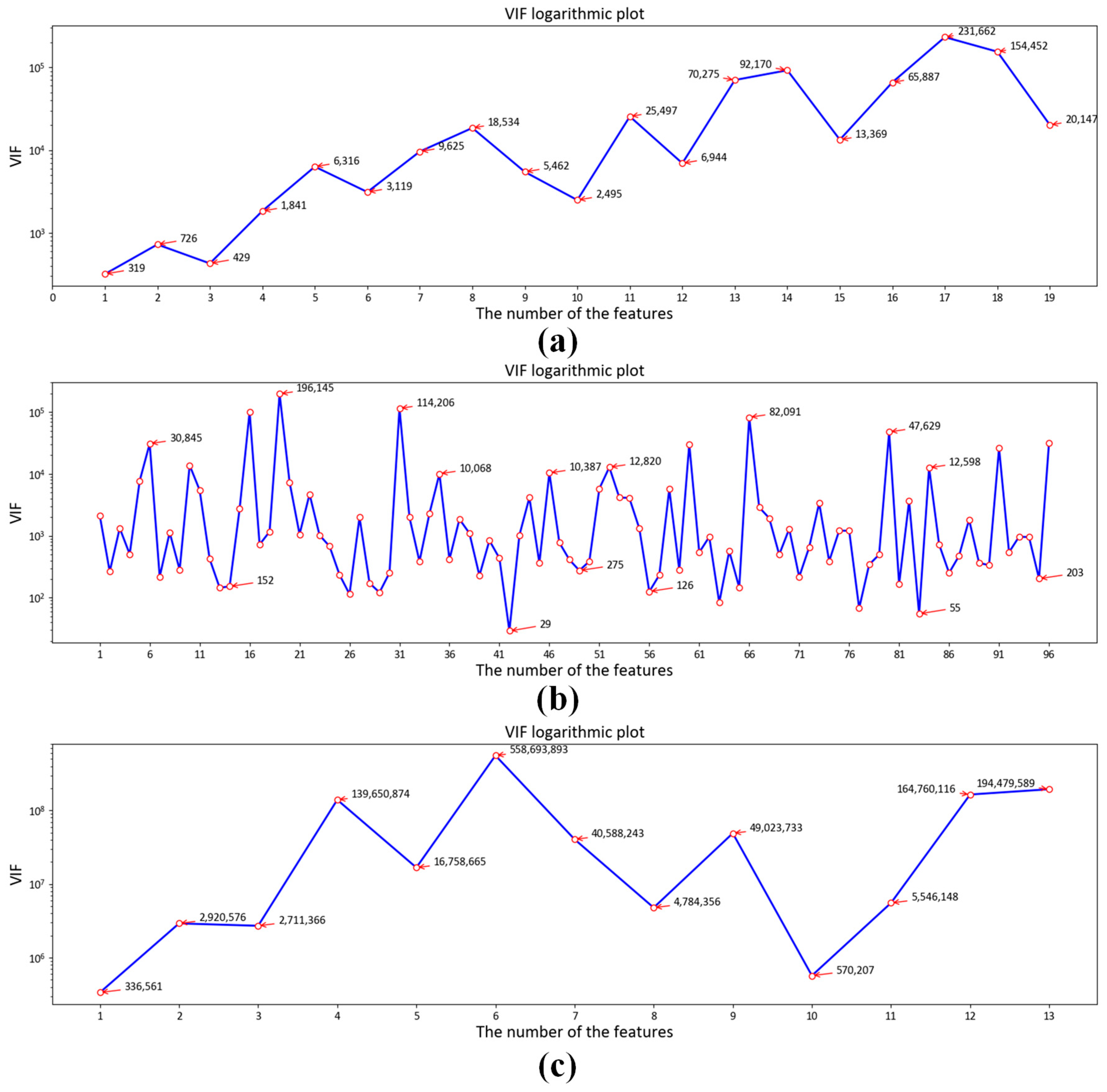
2.2. Kernel Expansion of the RGB Color Value
2.3. Color Space Conversion Based on KPLS
2.4. Evaluation Metrics
3. Experiment
3.1. Experimental Scheme
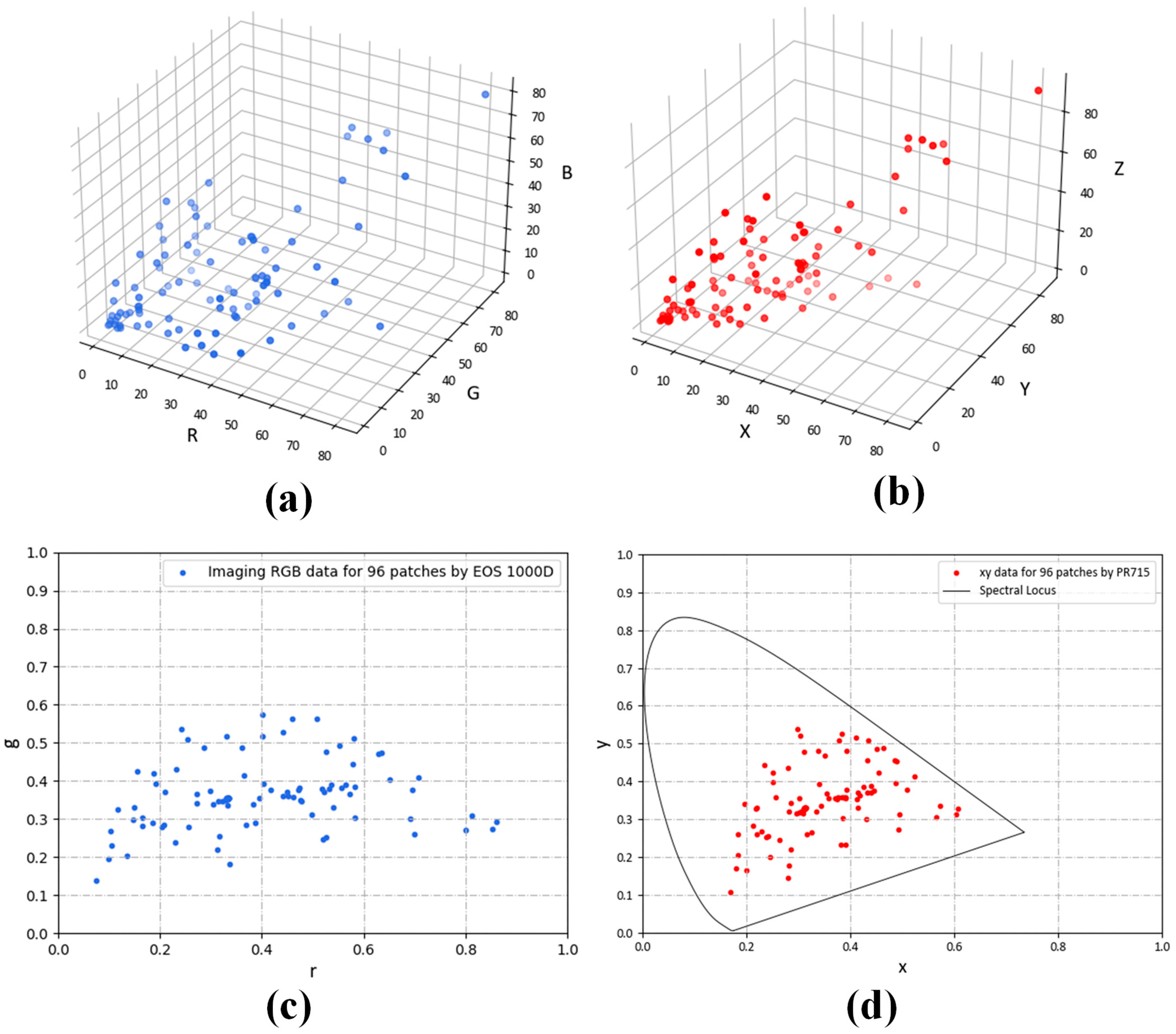
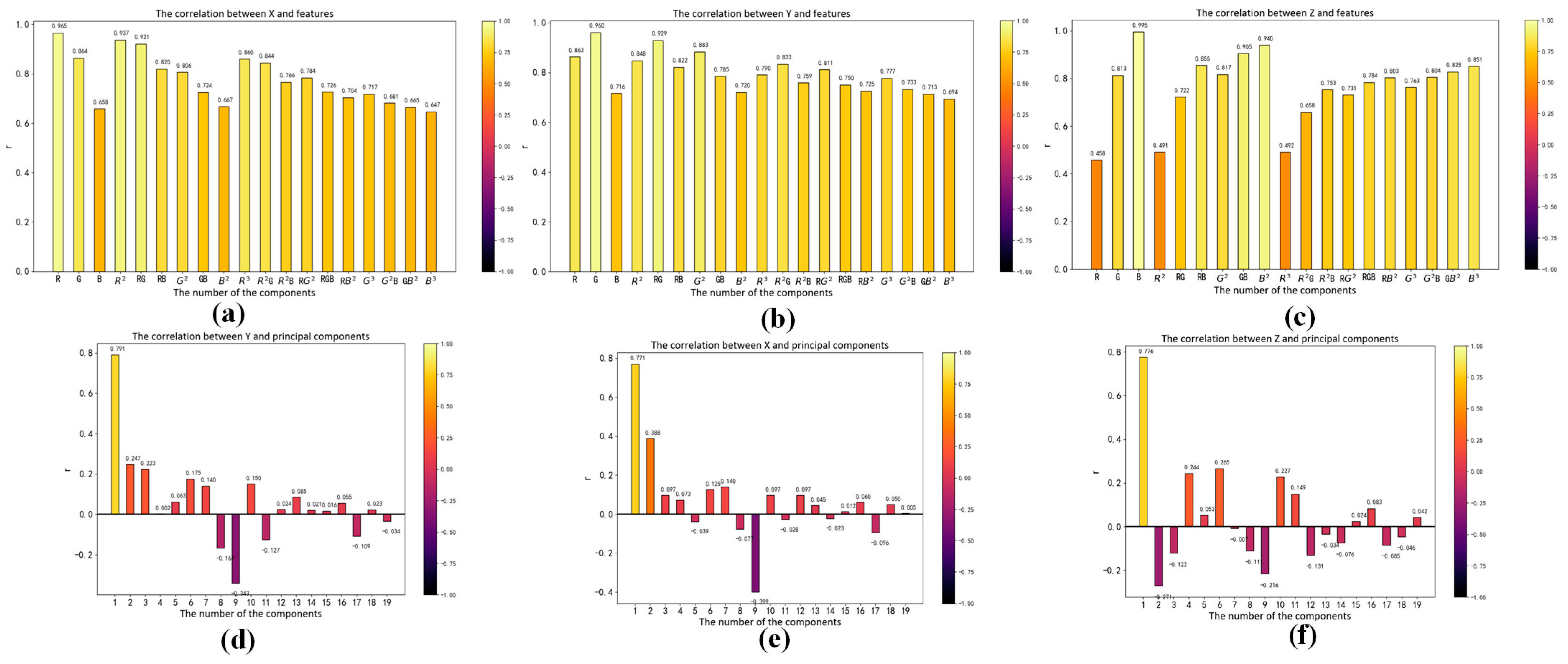
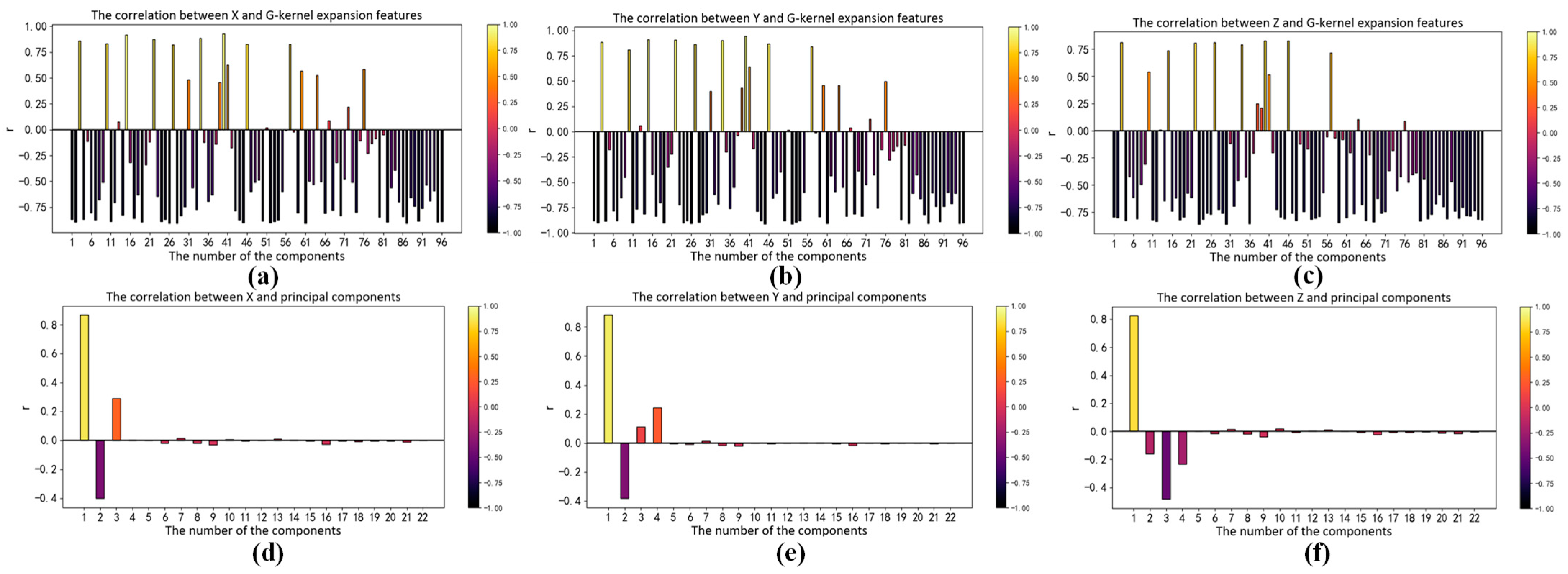
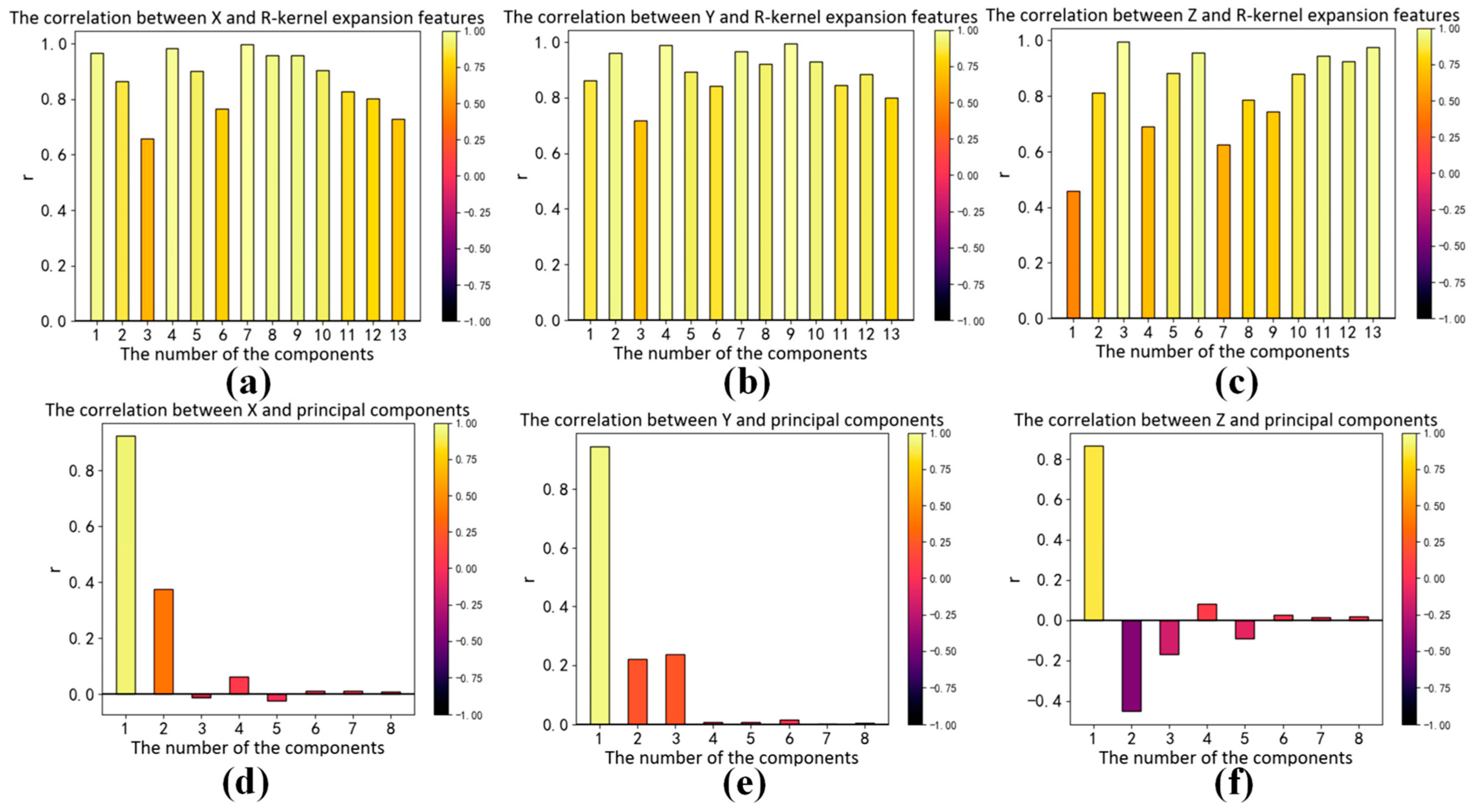
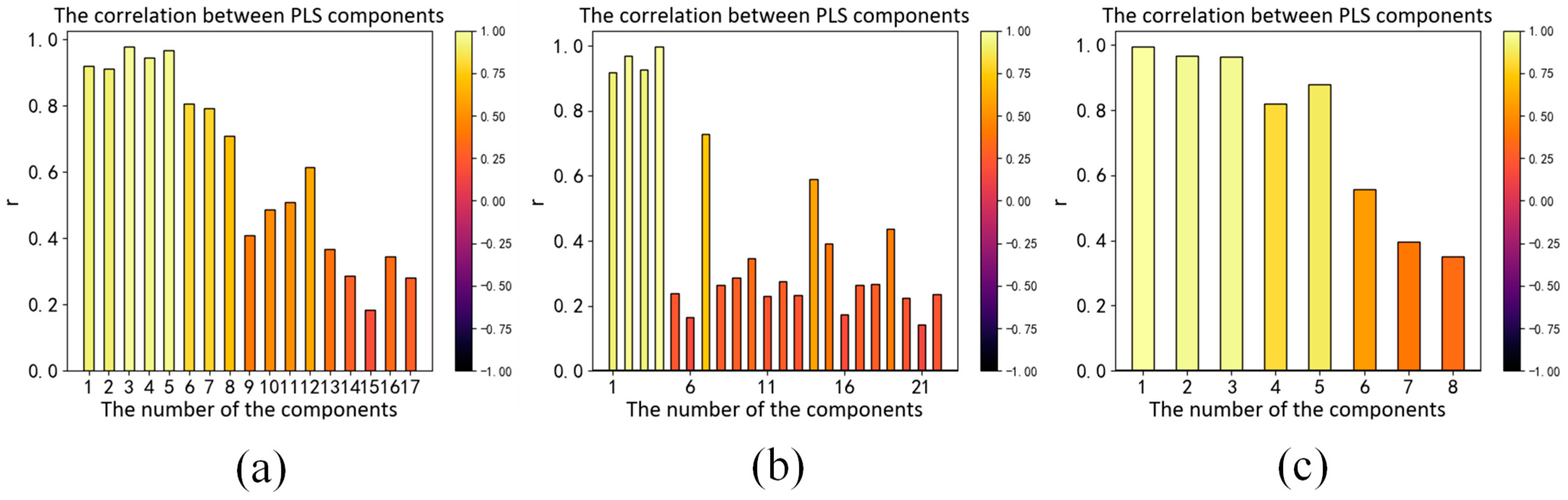
3.2. Correlation Analysis of Input and Output Vectors
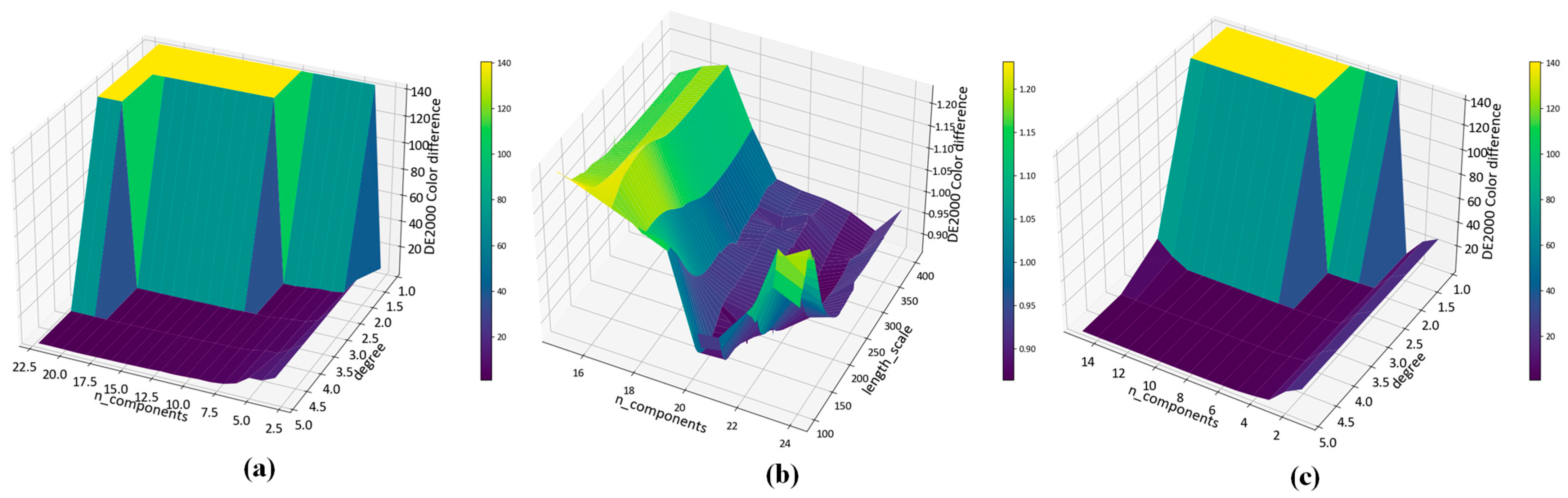
3.3. Hyperparameter Selection
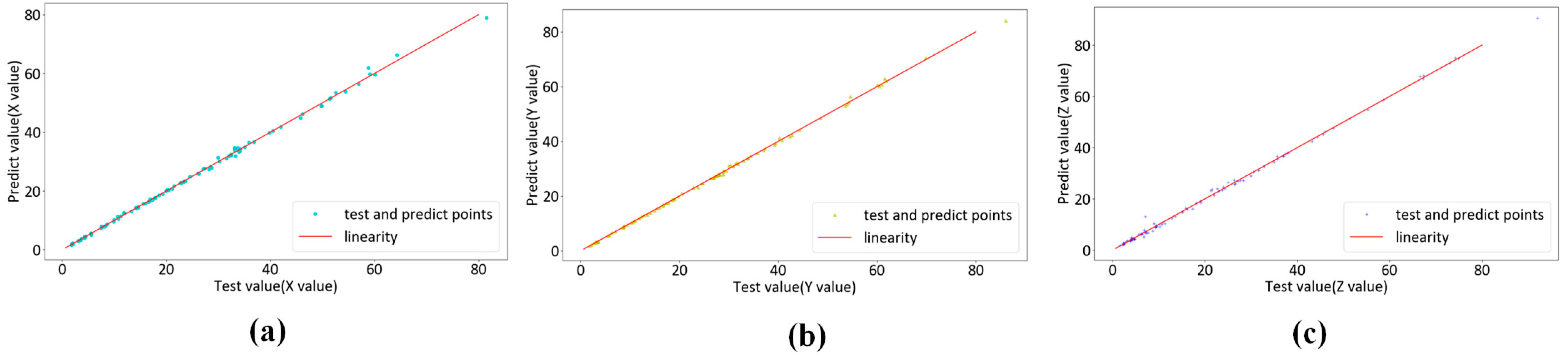
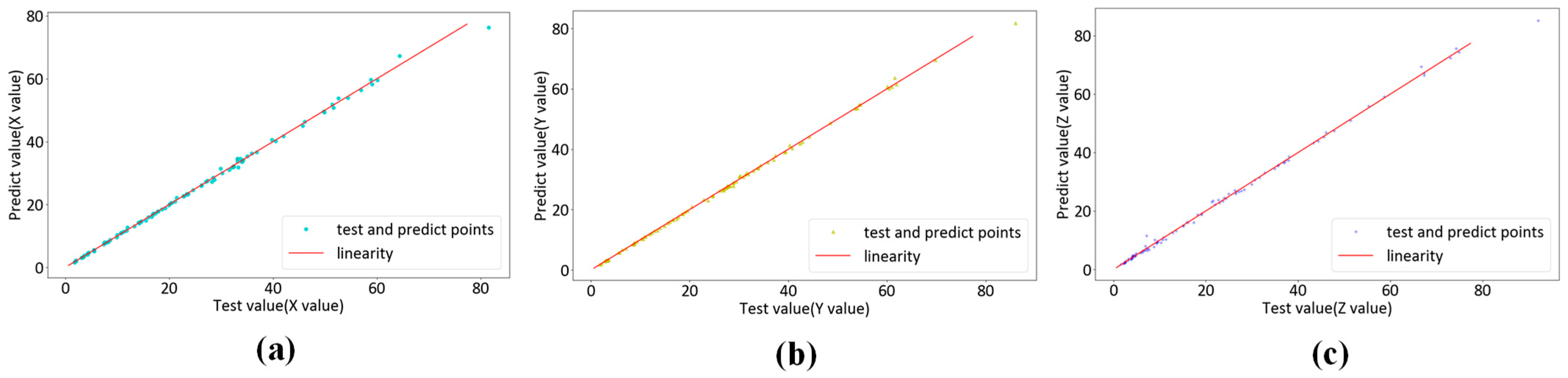
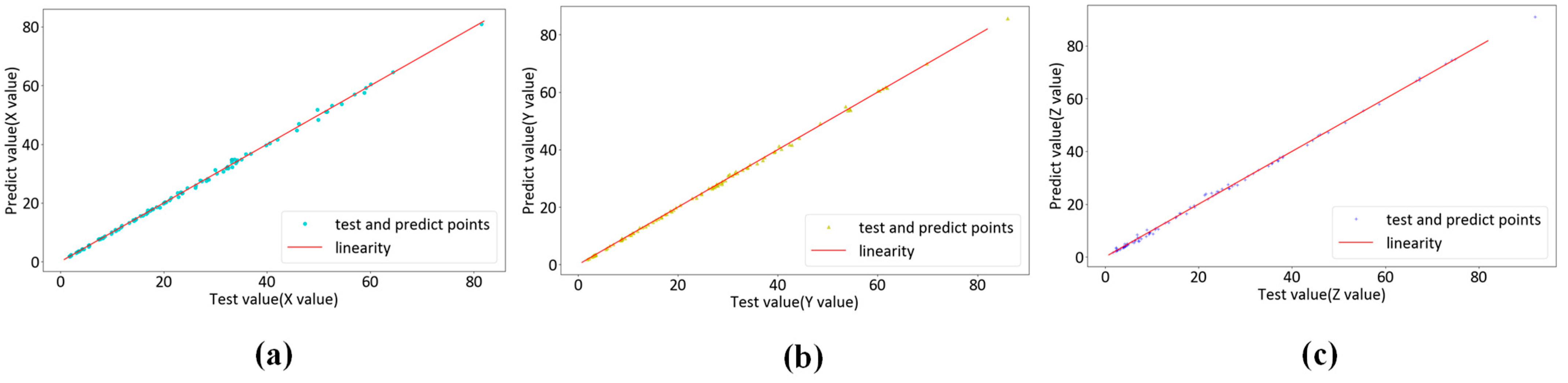
3.4. Experimental Results of This Paper
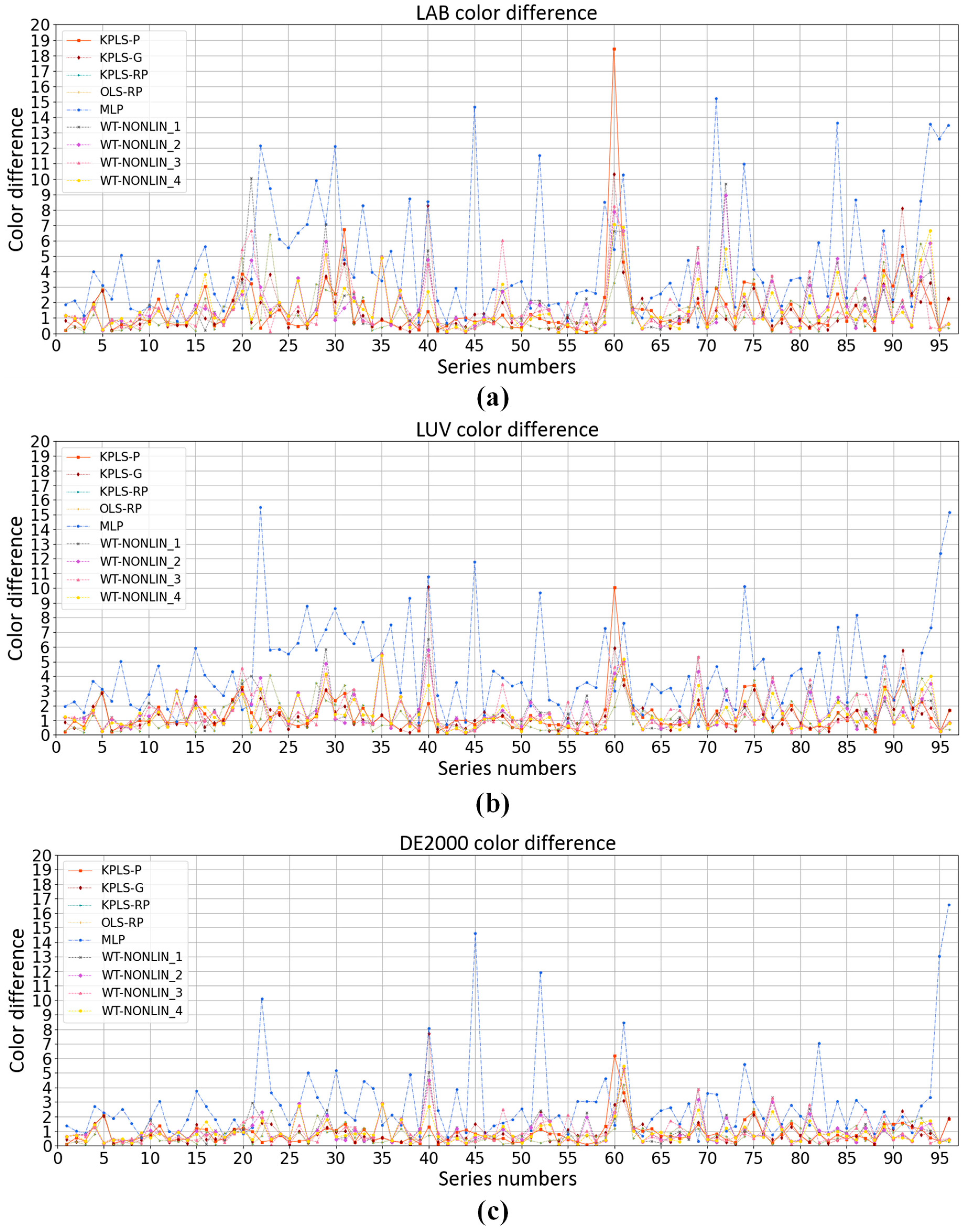
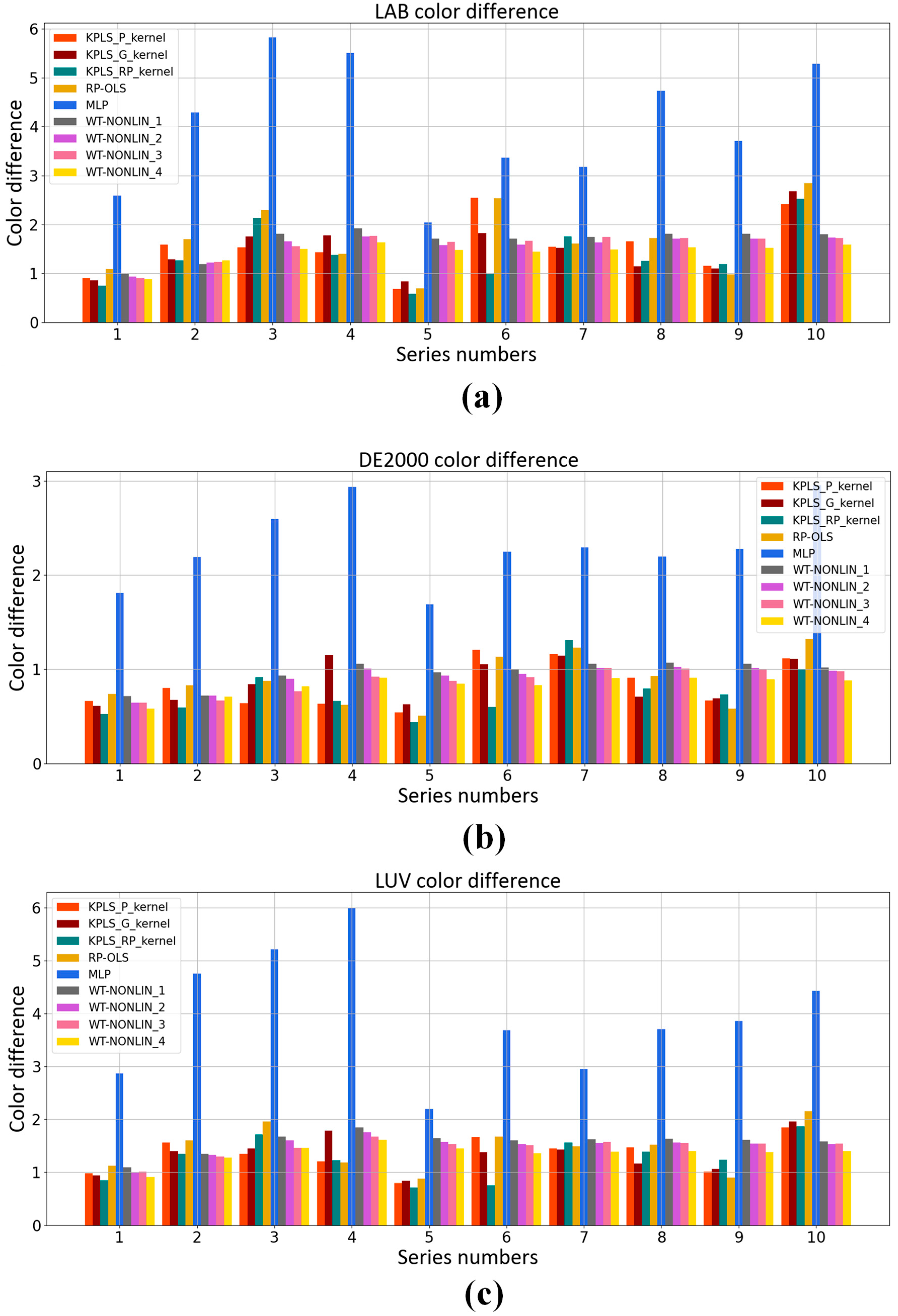
3.5. Comparison with Other Methods
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mou, T.; Shen, H. Colorimetric characterization of imaging device by total color difference minimization. J. Zhejiang Univ. Sci. A 2006, 7, 1041–1045. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, H.; Liu, X. A research on the color characterization of digital camera. J. Beijing Inst. Graph. Commun. 2006, 14, 9–12. [Google Scholar]
- Zhang, X. Study of Color Reproduction Theory and Method for Digital Image; Zhejiang University: Hangzhou, China, 2010. [Google Scholar]
- Fu, S.; Cui, C.; Zhang, R. Colorimetric characterization modeling software for digital imaging device. Opto. Electron. Eng. 2010, 37, 88–92. [Google Scholar]
- Green, P. Color Management: Understanding and Using ICC Profiles; Wiley: Hoboken, NJ, USA, 2010; pp. 20–34. [Google Scholar]
- Danny, C.R. Publication CIE 159: A colour appearance model for colour management systems: CIECAM02. Color Res. Appl. 2006, 31, 156–159. [Google Scholar]
- Charbaji, A.; Heidari-Bafroui, H.; Rahmani, N.; Anagnostopoulos, C.; Faghri, M. Colorimetric Determination of Nitrate after Reduction to Nitrite in a Paper-Based Dip Strip. Chem. Proc. 2021, 5, 9. [Google Scholar]
- Berlina, A.N.; Ragozina, M.Y.; Komova, N.S.; Serebrennikova, K.V.; Zherdev, A.V.; Dzantiev, B.B. Development of Lateral Flow Test-System for the Immunoassay of Dibutyl Phthalate in Natural Waters. Biosensors 2022, 12, 1002. [Google Scholar] [CrossRef]
- Kim, J.-H.; Lee, Y.-J.; Ahn, Y.-J.; Kim, M.; Lee, G.-J. In situ detection of hydrogen sulfide in 3D-cultured, live prostate cancer cells using a paper-integrated analytical device. Chemosensors 2022, 10, 27. [Google Scholar] [CrossRef]
- Pomili, T.; Gatto, F.; Pompa, P.P. A Lateral Flow Device for Point-of-Care Detection of Doxorubicin. Biosensors 2022, 12, 896. [Google Scholar] [CrossRef] [PubMed]
- ISO 17321-1:2012; Graphic Technology and Photography-Colour Characterisation of Digital Still Cameras (DSCs)—Part 1: Stimuli, Metrology, and Test Procedures. International Organization for Standardization: Geneva, Switzerland, 5 November 2012.
- ISO 17321-1:2012; Graphic Technology and Photography-Colour Characterization of Digital Still Cameras (DSCs)—Part 2: Methods for Determining Transforms from Raw Dsc to Scene-Referred. International Organization for Standardization: Geneva, Switzerland, 12 October 2012.
- IEC 61966-9:200; Colour Measurement and Management-Multimedia Systems and Equipment-Part 9: Digital Cameras. International Electrotechnical Commission: Geneva, Switzerland, November 2003.
- Verdu, F.M.; Pujol, J.; Capilla, P. Calculation of the color matching functions of digital cameras from their complete spectral sensitivities. J. Imaging Sci. Technol. 2002, 46, 15–25. [Google Scholar] [CrossRef]
- Chouikha, M.B.; Placais, B.; Pouleau, G. Benefits and drawbacks of two methods for characterizing digital cameras. In Proceedings of the IS&T CGIV 2006 3rd European Conference on Colour in Graphics, Imaging, and Vision, Leeds, UK, 19–22 June 2006; Society for Imaging Science and Technology: Springfield, VA, USA, 2006; pp. 185–188. [Google Scholar]
- Lee, S.H.; Choi, J.S. Design and implementation of color correction system for images captured by digital camera. IEEE Trans. Consum. Electron. 2008, 54, 268–276. [Google Scholar] [CrossRef]
- Rump, M.; Zinke, A.; Klein, R. Practical spectral characterization of trichromatic cameras. ACM Trans. Graph. 2011, 30, 170. [Google Scholar] [CrossRef]
- Hung, P.C. Colorimetric calibration in electronic imaging devices using a look-up-table model and interpolations. J. Electron. Imaging 1993, 2, 53–61. [Google Scholar] [CrossRef]
- Balasubramanian, R. Reducing the cost of look up table based color transformations. J. Imaging Sci. Technol. 2000, 44, 321–327. [Google Scholar] [CrossRef]
- Johnson, T. Methods for characterizing colour scanners and digital cameras. Displays 1996, 16, 183–191. [Google Scholar] [CrossRef]
- Rowlands, D.A. Color conversion matrices in digital cameras: A tutorial. Opt. Eng. 2020, 59, 110801. [Google Scholar] [CrossRef]
- Jing, J.; Fang, S.; Shi, Z.; Xia, Q.; Li, Y. An efficient nonlinear polynomial color characterization method based on interrelations of color spaces. Color Res. Appl. 2020, 45, 1023–1039. [Google Scholar]
- Liu, Y.; Yu, H.; Shi, J. Camera characterization using back-propagation artificial neutral network based on Munsell system. Proc. SPIE 2008, 6621, 66210A. [Google Scholar]
- Li, Y.; Liao, N.; Li, H.; Lv, N.; Wu, W. Colorimetric characterization of the wide-color-gamut camera using the multilayer artificial neural network. J. Opt. Soc. Am. 2023, 40, 629–636. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Xie, X.; Zhang, Y.; Cao, F.; Liang, J.; Liao, N. Colorimetric characterization of color imaging systems using a multi-input PSO-BP neural network. Color Res. Appl. 2022, 47, 855–865. [Google Scholar] [CrossRef]
- Miao, H.; Zhang, L. The color characteristic model based on optimized BP neural network. China Acad. Conf. Printing Packaging 2016, 369, 55–63. [Google Scholar]
- Wang, P.; Chou, J.; Tseng, C. Colorimetric characterization of color image sensors based on convolutional neural network modeling. Sens. Mater. 2019, 31, 1513–1522. [Google Scholar] [CrossRef]
- Yang, B.; Chou, H.; Yang, T. Color reproduction method by support vector regression for color computer vision. Optik 2013, 124, 5649–5656. [Google Scholar] [CrossRef]
- Gong, R.; Wang, Q.; Shao, X.; Liu, J.J. A color calibration method between different digital cameras. Optik 2016, 127, 3281–3285. [Google Scholar] [CrossRef]
- Wu, X.; Fang, J.; Xu, H.; Wang, Z. High dynamic range image reconstruction in device-independent color space based on camera colorimetric characterization. Optik 2017, 140, 776–785. [Google Scholar] [CrossRef]
- Molada-Tebar, A.; Lerma, J.L.; Marques-Mateu, Á. Camera characterization for improving color archaeological documentation. Color Res. Appl. 2018, 43, 47–57. [Google Scholar]
- Finlayson, G.; Mackiewicz, M.; Hurlbert, A. Color correction using root-polynomial regression. IEEE Trans. Image Process. 2015, 24, 1460–1470. [Google Scholar] [CrossRef] [Green Version]
- Yamakabe, R.; Monno, Y.; Tanaka, M. Tunable color correction for noisy images. J. Electron. Imaging 2020, 29, 033012. [Google Scholar] [CrossRef]
- Hong, G.; Luo, M.; Rhodes, P.A. A study of digital camera colorimetric characterization based on polynomial modeling. Color Res. Appl. 2015, 26, 76–84. [Google Scholar] [CrossRef]
- Bianco, S.; Gasparini, F.; Russo, A.; Schettini, R. A new method for RGB to XYZ transformation based on pattern search optimization. IEEE Trans. Consum. Electron. 2007, 53, 1020–1028. [Google Scholar] [CrossRef]
- Shen, H.; Wan, H.; Zhang, Z. Estimating reflectance from multispectral camera responses based on partial least-squares regression. J. Electron. Imaging 2010, 19, 020501. [Google Scholar] [CrossRef] [Green Version]
- Heikkinen, V.; Mirhashemi, A.; Alho, J. Link functions and matérn kernel in the estimation of reflectance spectra from rgb responses. J. Opt. Soc. Am. A 2013, 30, 2444–2454. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, G.; Wan, X.; Wang, L.; Liu, S. Reflectance spectra reconstruction from trichromatic camera based on kernel partial least square method. Opt. Express 2019, 27. [Google Scholar] [CrossRef] [PubMed]
- Amiri, M.M.; Fairchild, M.D. A strategy toward spectral and colorimetric color reproduction using ordinary digital cameras. Color Res. Appl. 2018, 43, 675–684. [Google Scholar] [CrossRef]
- Abdi, H.; Williams, L.J. Partial least squares methods: Partial least squares correlation and partial least square regression. In Computational Toxicology: Volume II; Springer: Berlin/Heidelberg, Germany, 2013; pp. 549–579. [Google Scholar]
- Georgoula, M. Assessing colour differences of lighting stimuli using a visual display. PhD Thesis, University of Leeds, Leeds, UK, 2015. [Google Scholar]
- Commission Internationale de l’Eclairage (CIE). Recommendations on Uniform Color Spaces—Color Difference Equations, Psychometric Color Terms; CIE Publication: Vienna, Austria, 1978. [Google Scholar]
- Liu, H.; Cui, G.; Huang, M. Color-difference threshold for printed images. Appl. Mech. Mater. 2013, 469, 236–239. [Google Scholar]
- Luo, M.; Cui, G.; Georgoula, M. Colour difference evaluation for white light sources. Light Res. Technol. 2015, 47, 360–369. [Google Scholar] [CrossRef]
- Wen, S. P-46: A color space derived from CIELUV for display color management. SID Symp. Dig. Tech. Pap. 2012, 42, 1269–1272. [Google Scholar] [CrossRef]
- Schanda, J. CIE u′, v′uniform chromaticity scale diagram and CIELUV color space. In Encyclopedia of Color Science and Technology; Luo, M.R., Ed.; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Hill, B.; Fw, V.; Roger, T. Comparative analysis of the quantization of color spaces on the basis of the CIELAB color difference formula. ACM Trans. Graph. 1997, 16, 109–154. [Google Scholar] [CrossRef]
- Melgosa, M.; Trémeau, A.; Cui, G. Colour Difference Evaluation; Springer: Berlin/Heidelberg, Germany, 2013; pp. 59–77. [Google Scholar]
- Zhang, X.; Qiang, W.; Li, J. Estimating spectral reflectance from camera responses based on CIE XYZ tristimulus values under multi-illuminants. Color Res. Appl. 2017, 42, 68–75. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Series of Fold | P-Kernel | G-Kernel | RP-Kernel | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Order | Components | DE2000 | Components | DE2000 | Order | Components | DE2000 | ||
| 1 | 3 | 17 | 0.862 | 176 | 21 | 0.863 | 3 | 8 | 0.752 |
| 2 | 3 | 18 | 0.895 | 285 | 22 | 0.858 | 3 | 8 | 0.756 |
| 3 | 3 | 17 | 0.897 | 196 | 21 | 0.880 | 3 | 8 | 0.742 |
| 4 | 3 | 18 | 0.947 | 400 | 20 | 0.940 | 5 | 11 | 0.759 |
| 5 | 3 | 17 | 0.941 | 267 | 22 | 0.896 | 5 | 12 | 0.764 |
| 6 | 3 | 17 | 0.794 | 236 | 23 | 0.882 | 5 | 8 | 0.769 |
| 7 | 4 | 18 | 0.825 | 230 | 22 | 0.773 | 3 | 8 | 0.670 |
| 8 | 3 | 18 | 0.838 | 226 | 22 | 0.749 | 3 | 9 | 0.699 |
| 9 | 3 | 18 | 0.898 | 225 | 22 | 0.861 | 5 | 11 | 0.720 |
| 10 | 4 | 17 | 0.840 | 245 | 23 | 0.738 | 5 | 8 | 0.707 |
| The Series of Fold | P-Kernel | G-Kernel | RP-Kernel | ||||||
|---|---|---|---|---|---|---|---|---|---|
| LAB | LUV | DE2000 | LAB | LUV | DE2000 | LAB | LUV | DE2000 | |
| 1 | 0.907 | 0.975 | 0.666 | 0.855 | 0.933 | 0.613 | 0.746 | 0.848 | 0.527 |
| 2 | 1.583 | 1.558 | 0.801 | 1.294 | 1.401 | 0.676 | 1.273 | 1.344 | 0.597 |
| 3 | 1.535 | 1.351 | 0.640 | 1.755 | 1.444 | 0.844 | 2.130 | 1.718 | 0.918 |
| 4 | 1.429 | 1.207 | 0.635 | 1.772 | 1.784 | 1.150 | 1.376 | 1.221 | 0.665 |
| 5 | 0.681 | 0.798 | 0.541 | 0.834 | 0.835 | 0.631 | 0.581 | 0.714 | 0.442 |
| 6 | 2.550 | 1.666 | 1.206 | 1.823 | 1.372 | 1.053 | 1.007 | 0.753 | 0.603 |
| 7 | 1.542 | 1.452 | 1.188 | 1.517 | 1.429 | 1.144 | 1.749 | 1.557 | 1.311 |
| 8 | 1.655 | 1.471 | 0.898 | 1.146 | 1.164 | 0.711 | 1.258 | 1.391 | 0.799 |
| 9 | 1.154 | 1.010 | 0.665 | 1.099 | 1.056 | 0.696 | 1.194 | 1.232 | 0.733 |
| 10 | 2.411 | 1.847 | 1.116 | 2.684 | 1.954 | 1.113 | 2.522 | 1.865 | 1.003 |
| Model | CIELAB Color Difference | CIELUV Color Difference | CIEDE2000 Color Difference | |
|---|---|---|---|---|
| KPLS | P-kernel | 1.5447 | 1.3335 | 0.8356 |
| KPLS | G-kernel | 1.4779 | 1.3372 | 0.8631 |
| KPLS | RP-kernel | 1.3836 | 1.2643 | 0.7598 |
| RP-OLS [32] | 1.4221 | 1.2933 | 0.7775 | |
| MLP | 4.052 | 4.4166 | 2.8895 | |
| WT-NONLIN formula 1 [39] | 1.7977 | 1.5839 | 1.0207 | |
| WT-NONLIN formula 2 [39] | 1.7272 | 1.5343 | 0.9858 | |
| WT-NONLIN formula 3 [39] | 1.7242 | 1.5429 | 0.9799 | |
| WT-NONLIN formula 4 [39] | 1.5878 | 1.4017 | 0.8847 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Liu, L.; Feng, Z.; Liao, N.; Liu, Q.; Xie, X. Colorimetric Characterization of Color Imaging System Based on Kernel Partial Least Squares. Sensors 2023, 23, 5706. https://doi.org/10.3390/s23125706
Zhao S, Liu L, Feng Z, Liao N, Liu Q, Xie X. Colorimetric Characterization of Color Imaging System Based on Kernel Partial Least Squares. Sensors. 2023; 23(12):5706. https://doi.org/10.3390/s23125706
Chicago/Turabian StyleZhao, Siyu, Lu Liu, Zibing Feng, Ningfang Liao, Qiang Liu, and Xufen Xie. 2023. "Colorimetric Characterization of Color Imaging System Based on Kernel Partial Least Squares" Sensors 23, no. 12: 5706. https://doi.org/10.3390/s23125706