
Evaluation of Roadside LiDAR-Based and Vision-Based Multi-Model All-Traffic Trajectory Data

Abstract
:1. Introduction
2. Literature Review
2.1. Different Types of Traffic Trajectory Data
2.1.1. Vision-Based Trajectory Data
2.1.2. Radar-Based Trajectory Data
2.1.3. LiDAR-Based Trajectory Data
2.1.4. Other Types of Trajectory Data
2.2. Trajectory Data Processing
2.2.1. LiDAR-Based Data Processing
2.2.2. Vision-Based Data Processing
2.3. Applications on Trajectory Data
2.3.1. Smart City
2.3.2. Traffic Safety
2.3.3. Environmental Impacts
3. Comparison of Trajectory Output
3.1. Trajectory General Location Accuracy
3.2. Vehicle Volume Count Accuracy
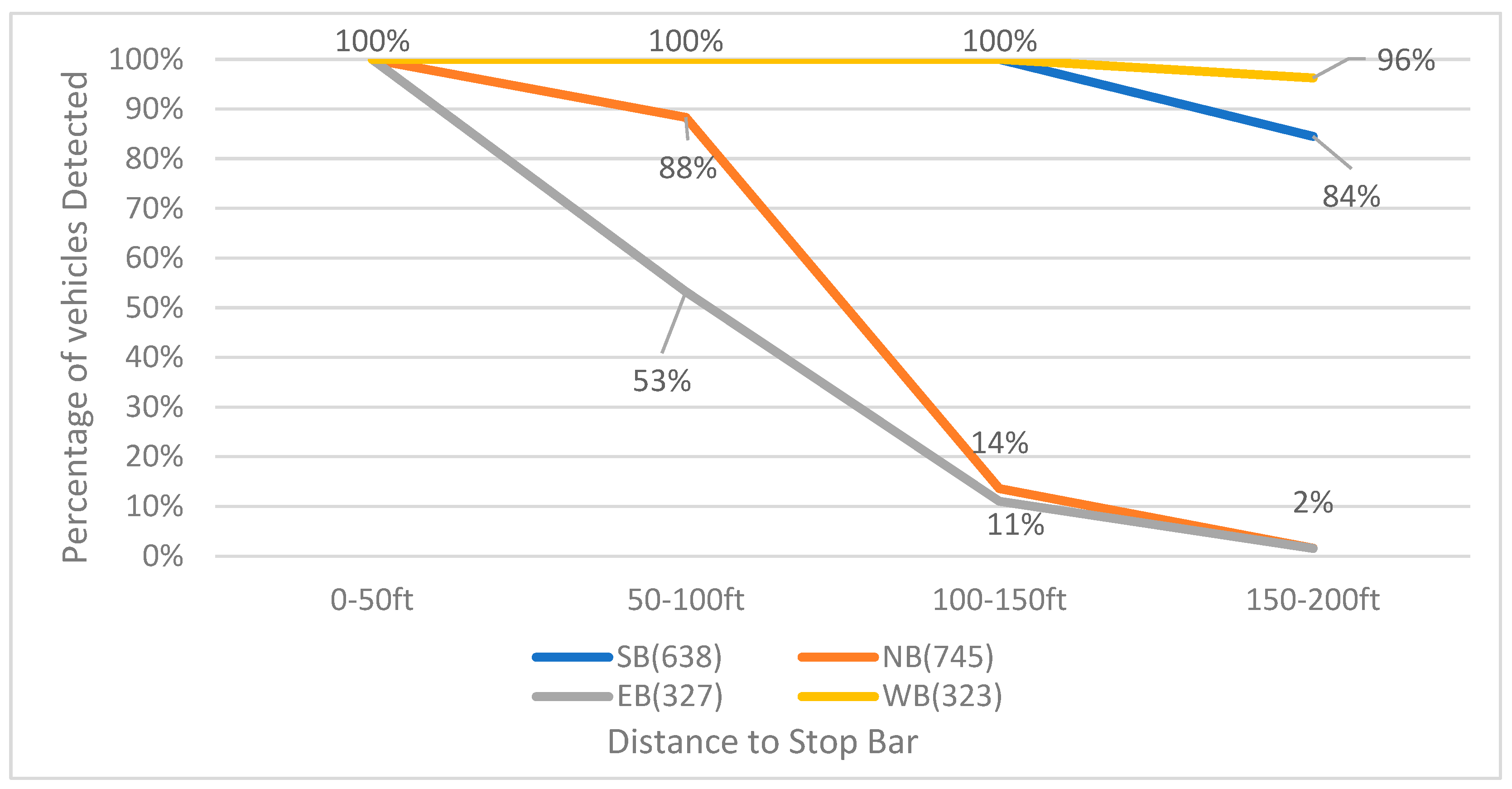
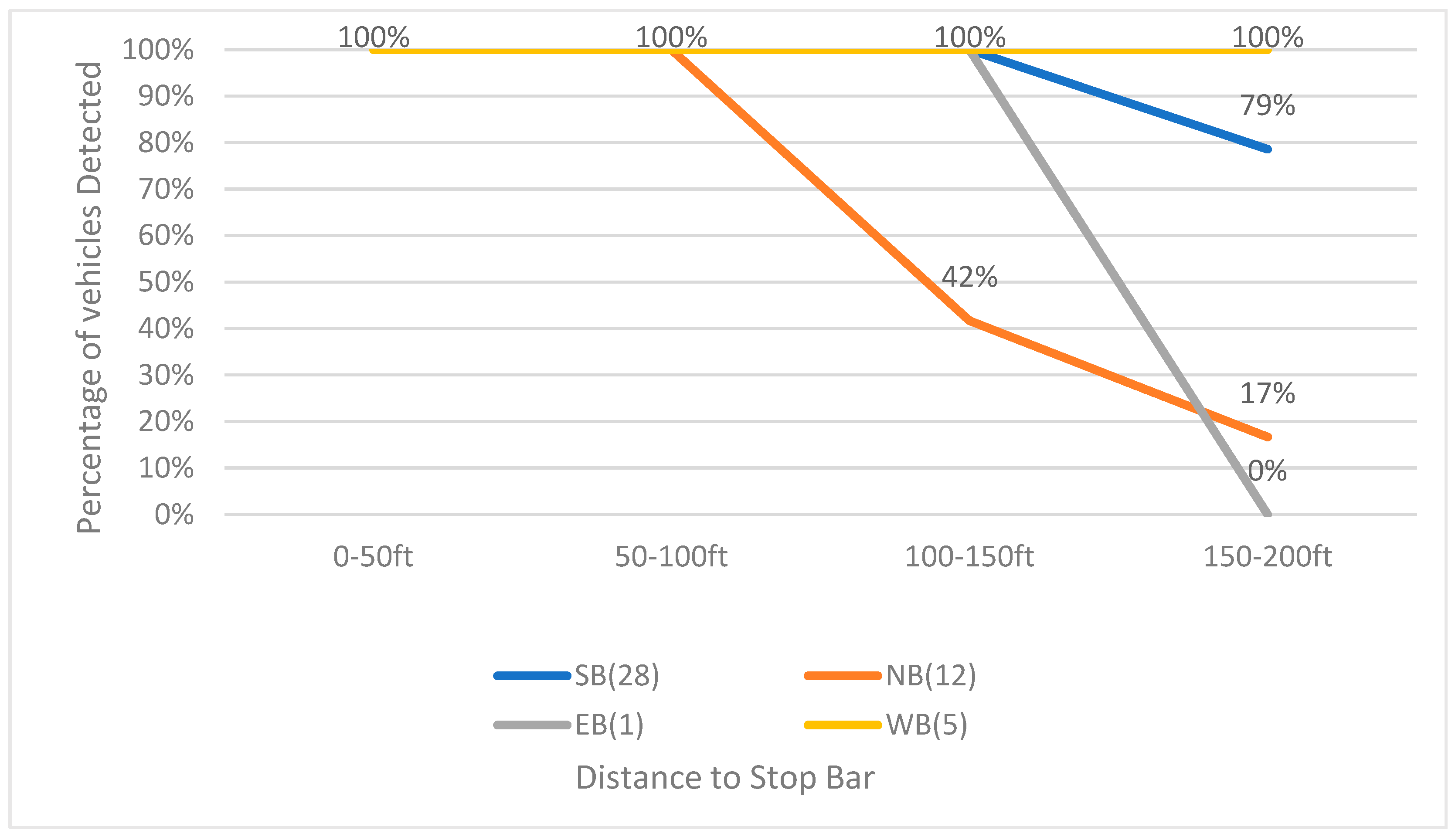
3.3. Detection Range
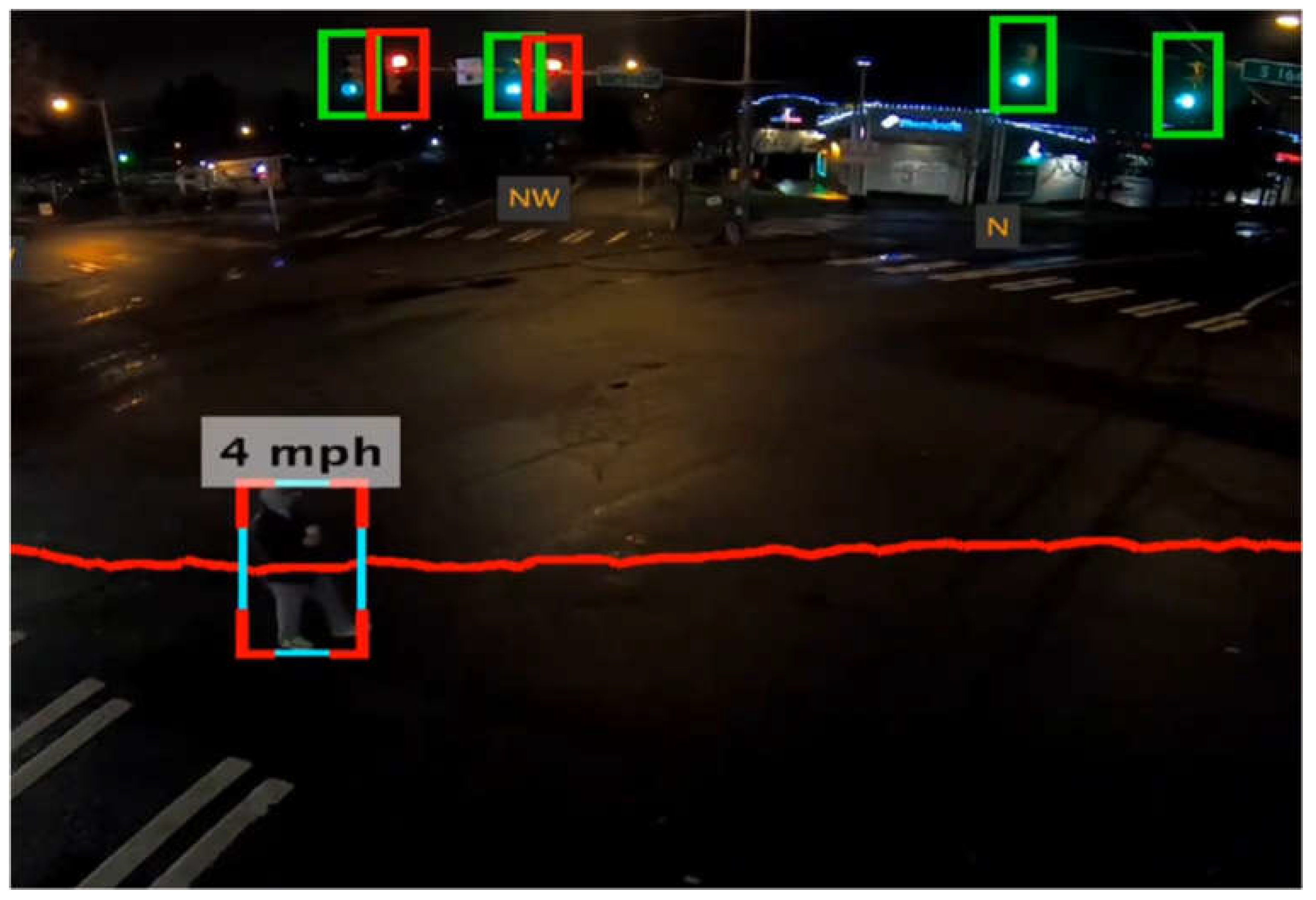
3.4. Pedestrian Detection
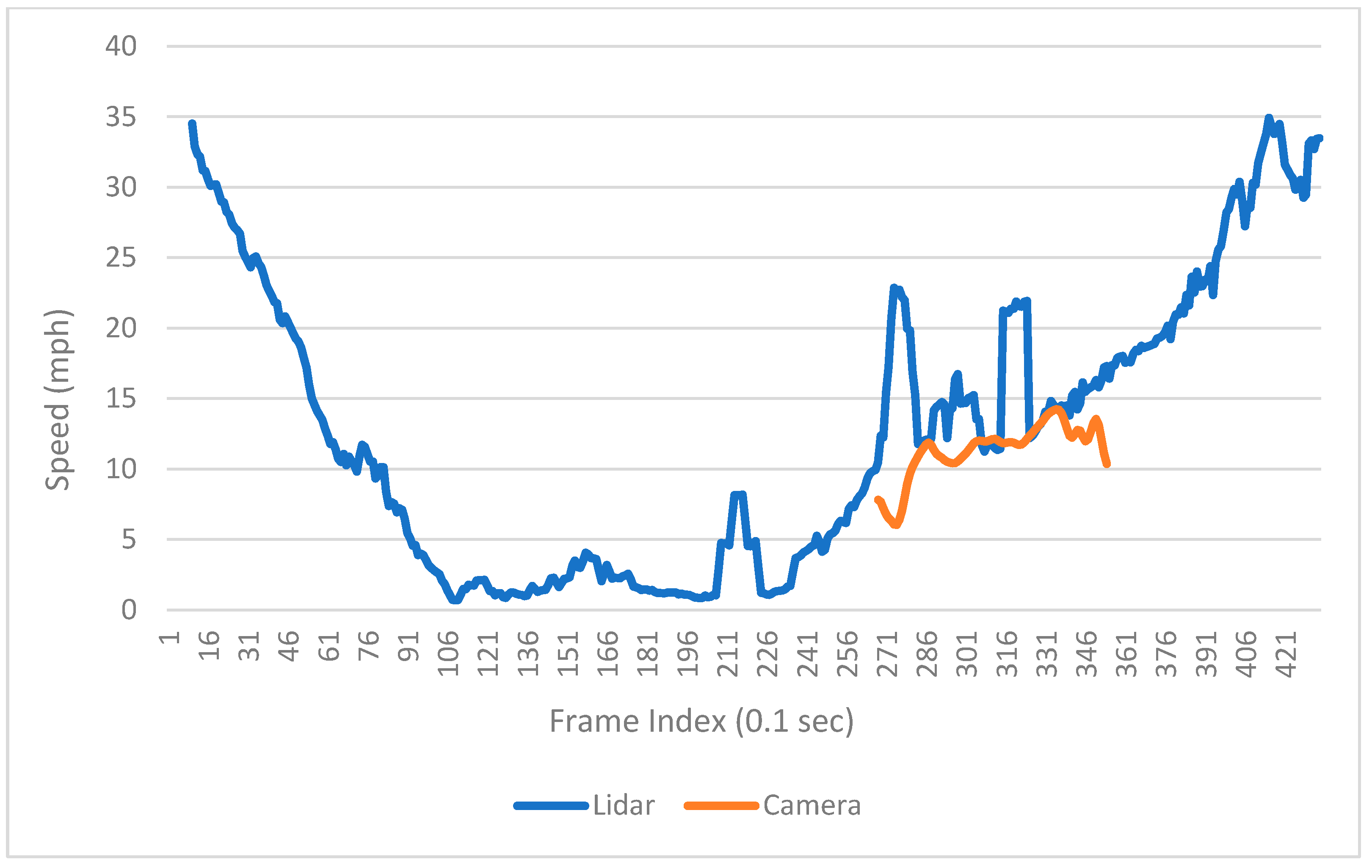
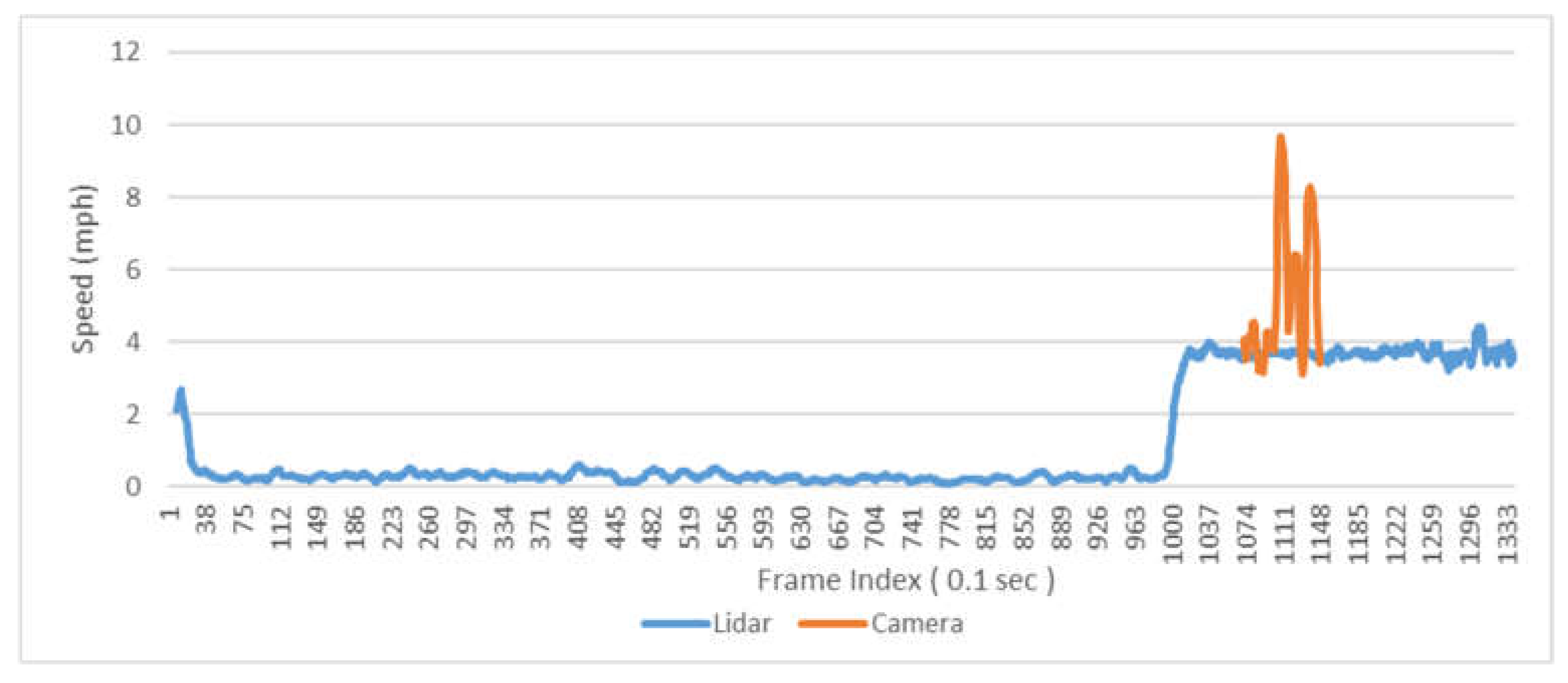
3.5. Speed
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Klein, L.A.; Mills, M.K.; Gibson, D.R. Traffic Detector Handbook: Volume I (No. FHWA-HRT-06-108); Turner-Fairbank Highway Research Center: McLean, VA, USA, 2006. [Google Scholar]
- Del Serrone, G.; Cantisani, G.; Peluso, P. Speed data collection methods: A review. Transp. Res. Procedia 2023, 69, 512–519. [Google Scholar] [CrossRef]
- Li, L.; Jiang, R.; He, Z.; Chen, X.; Zhou, X. Trajectory data-based traffic flow studies: A revisit. Transp. Res. Part C Emerg. Technol. 2020, 114, 225–240. [Google Scholar] [CrossRef]
- Bruno, S.; Loprencipe, G.; Marchetti, V. Proposal for a Low-Cost Monitoring System to Assess the Pavement Deterioration in Urban Roads. Eur. Transp./Trasp. Eur. 2023, 91, 1–10. [Google Scholar] [CrossRef]
- Kerner, B.; Demir, C.; Herrtwich, R.; Klenov, S.; Rehborn, H.; Aleksi, M.; Haug, A. Traffic state detection with floating car data in road networks. In Proceedings of the 2005 IEEE Intelligent Transportation Systems, Vienna, Austria, 16 September 2005; pp. 44–49. [Google Scholar]
- Guo, Q.; Li, L.; Ban, X.J. Urban traffic signal control with connected and automated vehicles: A survey. Transp. Res. Part C Emerg. Technol. 2019, 101, 313–334. [Google Scholar] [CrossRef]
- Toledo, T.; Koutsopoulos, H.N.; Ahmed, K.I. Estimation of vehicle trajectories with locally weighted regression. Transp. Res. Rec. J. Transp. Res. Board 2007, 1999, 161–169. [Google Scholar] [CrossRef] [Green Version]
- Sivaraman, S.; Trivedi, M.M. A general active-learning framework for on-road vehicle recognition and tracking. IEEE Trans. Intell. Transp. Syst. 2010, 11, 267–276. [Google Scholar] [CrossRef] [Green Version]
- Trivedi, M.M.; Gandhi, T.; McCall, J. Looking-in and looking-out of a vehicle: Computer-vision-based enhanced vehicle safety. IEEE Trans. Intell. Transp. Syst. 2007, 8, 108–120. [Google Scholar] [CrossRef] [Green Version]
- Street Simplified. Available online: https://www.streetsimplified.com (accessed on 4 June 2023).
- Hasirlioglu, S.; Riener, A. Introduction to rain and fog attenuation on automotive surround sensors. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar]
- Felguera-Martín, D.; González-Partida, J.T.; Almorox-González, P.; Burgos-García, M. Vehicular traffic surveillance and road lane detection using radar interferometry. IEEE Trans. Veh. Technol. 2012, 61, 959–970. [Google Scholar] [CrossRef] [Green Version]
- Munoz-Ferreras, J.M.; Perez-Martinez, F.; Calvo-Gallego, J.; Asensio-Lopez, A.; Dorta-Naranjo, B.P.; Blanco-del-Campo, A. Traffic surveillance system based on a high-resolution radar. IEEE Trans. Geosci. Remote. Sens. 2008, 46, 1624–1633. [Google Scholar] [CrossRef]
- Weil, C.M.; Camell, D.; Novotny, D.R.; Johnk, R.T. Across-the-road photo traffic radars: New calibration techniques. In Proceedings of the 15th International Conference on Microwaves, Radar and Wireless Communications (IEEE Cat. No. 04EX824), Warsaw, Poland, 17–19 May 2004; Volume 3, pp. 889–892. [Google Scholar]
- Roy, A.; Gale, N.; Hong, L. Automated traffic surveillance using fusion of Doppler radar and video information. Math. Comput. Model. 2011, 54, 531–543. [Google Scholar] [CrossRef]
- Wang, X.; Xu, L.; Sun, H.; Xin, J.; Zheng, N. On-road vehicle detection and tracking using MMW radar and monovision fusion. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2075–2084. [Google Scholar] [CrossRef]
- Xique, I.J.; Buller, W.; Fard, Z.B.; Dennis, E.; Hart, B. Evaluating complementary strengths and weaknesses of ADAS sensors. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- Chen, C.C.; Andrews, H.C. Target-motion-induced radar imaging. IEEE Trans. Aerosp. Electron. Syst. 1980, AES-16, 2–14. [Google Scholar] [CrossRef]
- Ausherman, D.A.; Kozma, A.; Walker, J.L.; Jones, H.M.; Poggio, E.C. Developments in radar imaging. IEEE Trans. Aerosp. Electron. Syst. 1984, AES-20, 363–400. [Google Scholar] [CrossRef]
- Del Campo, A.B.; Lopez, A.A.; Naranjo, B.P.D.; Menoyo, J.G.; Morán, D.R.; Duarte, C.C.; Martín, J.J. Millimeter-wave radar demonstrator for high resolution imaging. In Proceedings of the First European Radar Conference, 2004. EURAD, Amsterdam, The Netherlands, 11–15 October 2004; pp. 65–68. [Google Scholar]
- Liu, W.J.; Kasahara, T.; Yasugi, M.; Nakagawa, Y. Pedestrian recognition using 79GHz radars for intersection surveillance. In Proceedings of the 2016 European Radar Conference (EuRAD), London, UK, 5–7 October 2016; pp. 233–236. [Google Scholar]
- Zhao, J.; Xu, H.; Liu, H.; Wu, J.; Zheng, Y.; Wu, D. Detection and tracking of pedestrians and vehicles using roadside LiDAR sensors. Transp. Res. Part C Emerg. Technol. 2019, 100, 68–87. [Google Scholar] [CrossRef]
- Wagner, D.; Neumeister, D.; Murakami, E. Global positioning systems for personal travel surveys: Lexington area travel data collection test: Appendixes. In Proceedings of the National Traffic Data Acquisition Conference, Albuquerque, NM, USA, 5–7 May 1996. [Google Scholar]
- Gilani, H. Automatically Determining Route and Mode of Transport Using a GPS Enabled Phone. Master’s Thesis, University of South Florida, Tampa, FL, USA, 2005. [Google Scholar]
- Hudson, J.G.; Duthie, J.C.; Rathod, Y.K.; Larsen, K.A.; Meyer, J.L. Using Smartphones to Collect Bicycle Travel Data in Texas (No. UTCM 11-35-69); Texas Transportation Institute, University Transportation Center for Mobility: College Station, TX, USA, 2012. [Google Scholar]
- Bierlaire, M.; Chen, J.; Newman, J. A probabilistic map matching method for Smartphone GPS data. Transp. Res. Part C Emerg. Technol. 2013, 26, 78–98. [Google Scholar] [CrossRef]
- Wejo and CtrlShift. The Connected Car Data Market. In: The Growth of the Connected Vehicle Data Market—The Implications of Personal Data and Emerging US Legislation. 2020. Available online: https://www.wejo.com (accessed on 4 June 2023).
- Zhan, X.; Zheng, Y.; Yi, X.; Ukkusuri, S.V. Citywide traffic volume estimation using trajectory data. IEEE Trans. Knowl. Data Eng. 2016, 29, 272–285. [Google Scholar] [CrossRef]
- Duan, Z.; Yang, Y.; Zhang, K.; Ni, Y.; Bajgain, S. Improved deep hybrid networks for urban traffic flow prediction using trajectory data. IEEE Access 2018, 6, 31820–31827. [Google Scholar] [CrossRef]
- Sun, S.; Chen, J.; Sun, J. Traffic congestion prediction based on GPS trajectory data. Int. J. Distrib. Sens. Netw. 2019, 15, 1550147719847440. [Google Scholar] [CrossRef]
- Chen, Z.; Yang, Y.; Huang, L.; Wang, E.; Li, D. Discovering urban traffic congestion propagation patterns with taxi trajectory data. IEEE Access 2018, 6, 69481–69491. [Google Scholar] [CrossRef]
- Kong, X.; Xu, Z.; Shen, G.; Wang, J.; Yang, Q.; Zhang, B. Urban traffic congestion estimation and prediction based on floating car trajectory data. Futur. Gener. Comput. Syst. 2016, 61, 97–107. [Google Scholar] [CrossRef]
- Yue, Y.; Zhuang, Y.; Li, Q.; Mao, Q. Mining time-dependent attractive areas and movement patterns from taxi trajectory data. In Proceedings of the 2009 17th International Conference on Geoinformatics, Fairfax, VA, USA, 12–14 August 2009; pp. 1–6. [Google Scholar]
- Wang, Z.; Lu, M.; Yuan, X.; Zhang, J.; Van De Wetering, H. Visual traffic jam analysis based on trajectory data. IEEE Trans. Vis. Comput. Graph. 2013, 19, 2159–2168. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perkins, S.R.; Harris, J.L. Traffic conflict characteristics-accident potential at intersections. Highw. Res. Rec. 1968, 225, 35–43. [Google Scholar]
- Xue, Q.-w.; Jiang, Y.-m.; Jian, L.U. Risky driving behavior recognition based on trajectory data. China J. Highw. Transp. 2020, 33, 84. [Google Scholar]
- Park, H.; Oh, C.; Moon, J.; Kim, S. Development of a lane change risk index using vehicle trajectory data. Accid. Anal. Prev. 2018, 110, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.; Shi, X.; Wong, Y.D. Key feature selection and risk prediction for lane-changing behaviors based on vehicles’ trajectory data. Accid. Anal. Prev. 2019, 129, 156–169. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Peng, Y.; Cai, Y. Vision-based approach for predicting the probability of vehicle–pedestrian collisions at intersections. IET Intell. Transp. Syst. 2020, 14, 1447–1455. [Google Scholar] [CrossRef]
- Li, P.; Abdel-Aty, M.; Yuan, J. Using bus critical driving events as surrogate safety measures for pedestrian and bicycle crashes based on GPS trajectory data. Accid. Anal. Prev. 2021, 150, 105924. [Google Scholar] [CrossRef]
- Hunter, M.; Saldivar-Carranza, E.; Desai, J.; Mathew, J.K.; Li, H.; Bullock, D.M. A Proactive Approach to Evaluating Intersection Safety Using Hard-Braking Data. J. Big Data Anal. Transp. 2021, 3, 81–94. [Google Scholar] [CrossRef]
- Tarko, A.P. Traffic conflicts as crash surrogates. In Measuring Road Safety Using Surrogate Events; Elsevier: Amsterdam, The Netherlands, 2020; pp. 31–45. [Google Scholar]
- Liu, T.; Li, Z.; Liu, P.; Xu, C.; Noyce, D.A. Using empirical traffic trajectory data for crash risk evaluation under three-phase traffic theory framework. Accid. Anal. Prev. 2021, 157, 106191. [Google Scholar] [CrossRef]
- Wang, C.; Xu, C.; Dai, Y. A crash prediction method based on bivariate extreme value theory and video-based vehicle trajectory data. Accid. Anal. Prev. 2019, 123, 365–373. [Google Scholar] [CrossRef]
- Wang, J.; Luo, T.; Fu, T. Crash prediction based on traffic platoon characteristics using floating car trajectory data and the machine learning approach. Accid. Anal. Prev. 2019, 133, 105320. [Google Scholar] [CrossRef] [PubMed]
- Oh, C.; Kim, T. Estimation of rear-end crash potential using vehicle trajectory data. Accid. Anal. Prev. 2010, 42, 1888–1893. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Meng, H.; Chen, S.; Zhao, J.; Li, S.; Xiang, Q. Predicting traffic conflicts for expressway diverging areas using vehicle trajectory data. J. Transp. Eng. Part A Syst. 2020, 146, 04020003. [Google Scholar] [CrossRef]
- Yu, R.; Han, L.; Zhang, H. Trajectory data based freeway high-risk events prediction and its influencing factors analyses. Accid. Anal. Prev. 2021, 154, 106085. [Google Scholar] [CrossRef]
- Hu, Y.; Li, Y.; Huang, H.; Lee, J.; Yuan, C.; Zou, G. A high-resolution trajectory data driven method for real-time evaluation of traffic safety. Accid. Anal. Prev. 2022, 165, 106503. [Google Scholar] [CrossRef] [PubMed]
- National Research Council (NRC). Expanding Metropolitan Highways: Implication for Air Quality and Energy Use—Special Report 245; National Academy Press: Washington, DC, USA, 1995. [Google Scholar]
- De Vlieger, I.; De Keukeleere, D.; Kretzschmar, J. Environmental effects of driving behaviour and congestion related to passenger cars. Atmos. Environ. 2000, 34, 4649–4655. [Google Scholar] [CrossRef]
- Ahn, K.; Rakha, H.; Trani, A.; Van Aerde, M. Estimating vehicle fuel consumption and emissions based on instantaneous speed and acceleration levels. J. Transp. Eng. 2002, 128, 182–190. [Google Scholar] [CrossRef]
- Zhou, X.; Tanvir, S.; Lei, H.; Taylor, J.; Liu, B.; Rouphail, N.M.; Frey, H.C. Integrating a simplified emission estimation model and mesoscopic dynamic traffic simulator to efficiently evaluate emission impacts of traffic management strategies. Transp. Res. Part D: Transp. Environ. 2015, 37, 123–136. [Google Scholar] [CrossRef]
- Frey, H.C.; Liu, B. Development and evaluation of simplified version of moves for coupling with traffic simulation model. In Proceedings of the Transportation Research Board 92nd Annual Meeting, Washington, DC, USA, 13–17 January 2013; p. 13. [Google Scholar]
- Kraschl-Hirschmann, K.; Zallinger, M.; Luz, R.; Fellendorf, M.; Hausberger, S. A method for emission estimation for microscopic traffic flow simulation. In Proceedings of the 2011 IEEE Forum on Integrated and Sustainable Transportation Systems, Vienna, Austria, 29 June–1 July 2011; pp. 300–305. [Google Scholar]
- Treiber, M.; Kesting, A.; Thiemann, C. How much does traffic congestion increase fuel consumption and emissions? Applying a fuel consumption model to the NGSIM trajectory data. In Proceedings of the 87th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 13–17 January 2008; Volume 71, pp. 1–18. [Google Scholar]
- Chen, Z.; Yang, C.; Chen, A. Estimating fuel consumption and emissions based on reconstructed vehicle trajectories. J. Adv. Transp. 2014, 48, 627–641. [Google Scholar] [CrossRef]
- Wang, S.; Li, Z.; Tan, J.; Guo, W.; Li, L. A method for estimating carbon dioxide emissions based on low frequency GPS trajectories. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 1960–1964. [Google Scholar]
- Song, G.; Yu, L. Estimation of fuel efficiency of road traffic by characterization of vehicle-specific power and speed based on floating car data. Transp. Res. Rec. J. Transp. Res. Board 2009, 2139, 11–20. [Google Scholar] [CrossRef]
- Sun, Z.; Hao, P.; Ban, X.J.; Yang, D. Trajectory-based vehicle energy/emissions estimation for signalized arterials using mobile sensing data. Transp. Res. Part D Transp. Environ. 2015, 34, 27–40. [Google Scholar] [CrossRef]
- Alsabaan, M.; Naik, K.; Khalifa, T. Optimization of fuel cost and emissions using V2V communications. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1449–1461. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, X.; Ouyang, Y.; Li, M. Emission mitigation via longitudinal control of intelligent vehicles in a congested platoon. Comput. Aided Civ. Infrastruct. Eng. 2015, 30, 490–506. [Google Scholar] [CrossRef]
- Lemos, L.L.; Pasin, M. Intersection control in transportation networks: Opportunities to minimize air pollution emissions. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1616–1621. [Google Scholar]
- Wu, F.; Stern, R.E.; Cui, S.; Monache, M.L.D.; Bhadani, R.; Bunting, M.; Churchill, M.; Hamilton, N.; Haulcy, R.; Piccoli, B.; et al. Tracking vehicle trajectories and fuel rates in phantom traffic jams: Methodology and data. Transp. Res. Part C Emerg. Technol. 2019, 99, 82–109. [Google Scholar] [CrossRef] [Green Version]
- ArcGIS [GIS software], Version 10.0; Environmental Systems Research Institute, Inc.: Redlands, CA, USA, 2010.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aspect | LiDAR-Based | Vision-Based | Comments |
|---|---|---|---|
| Hardware Cost | ● | Cameras are currently much cheaper than LiDAR | |
| Maintenance Cost | ● | Video Camera is relatively easier to install and maintain than LiDAR; once a LiDAR is broken, it must be sent back to the manufacturer. | |
| Software (data processing) Cost | The data processing costs for LiDAR and cameras are similar; both are expensive. | ||
| Data storage | ● | Video needs much more storage space for the same time period than LiDAR data. | |
| Detection Range | ● | LiDAR shows a longer detection range. | |
| Daytime Vehicle Volume | ● | ● | Both sensors show good daytime vehicle counting capability. |
| Nighttime Vehicle Volume | ● | Cameras may miss some vehicles at night. | |
| Daytime Pedestrian Volume | ● | ● | Both sensors show good daytime pedestrian counting performance. |
| Nighttime Pedestrian Volume | ● | The camera barely recognizes pedestrians in poor-lighting conditions. | |
| Vehicle Speed | ● | ● | Both sensors generate decent vehicle speed information. |
| Pedestrian Speed | ● | LiDAR shows brilliant speed detection for relatively small objects, such as pedestrians/bicyclists. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, F.; Xu, H.; Tian, Y. Evaluation of Roadside LiDAR-Based and Vision-Based Multi-Model All-Traffic Trajectory Data. Sensors 2023, 23, 5377. https://doi.org/10.3390/s23125377
Guan F, Xu H, Tian Y. Evaluation of Roadside LiDAR-Based and Vision-Based Multi-Model All-Traffic Trajectory Data. Sensors. 2023; 23(12):5377. https://doi.org/10.3390/s23125377
Chicago/Turabian StyleGuan, Fei, Hao Xu, and Yuan Tian. 2023. "Evaluation of Roadside LiDAR-Based and Vision-Based Multi-Model All-Traffic Trajectory Data" Sensors 23, no. 12: 5377. https://doi.org/10.3390/s23125377