
Correction Model for Metal Oxide Sensor Drift Caused by Ambient Temperature and Humidity

 , ,
, ,  , and
, and
Abstract
:1. Introduction
2. Experimental
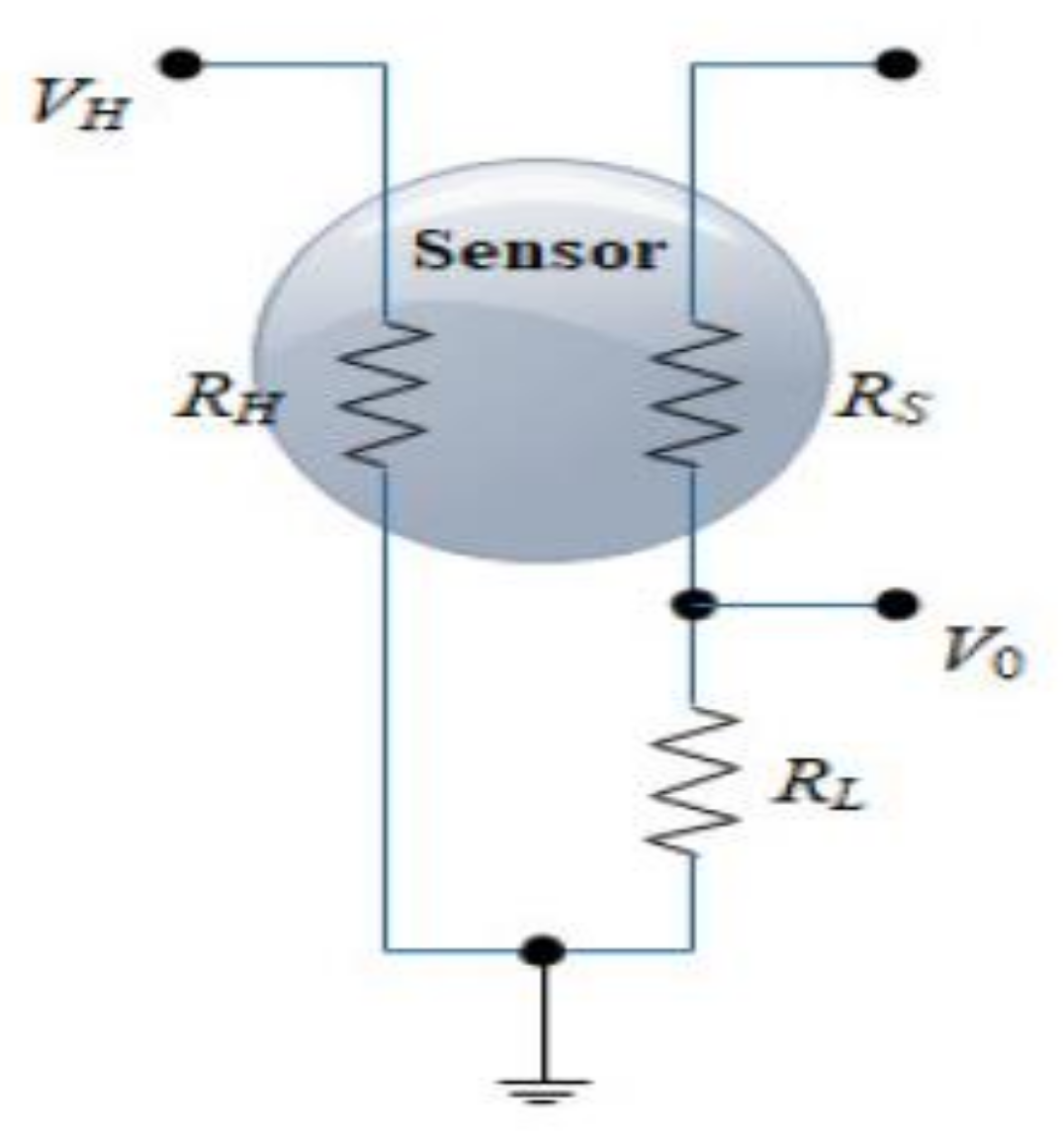
2.1. Metal Oxide Gas Sensor
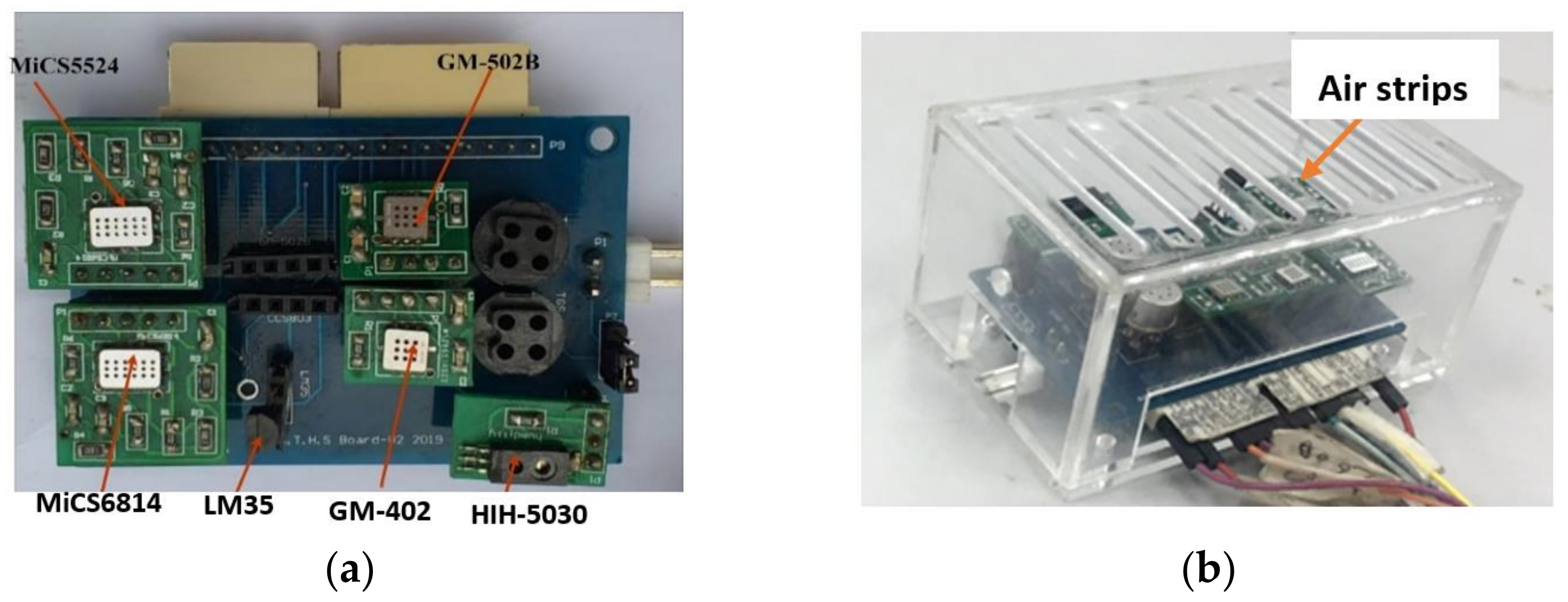
2.2. Sensor Array Module and Partially Closed Chamber
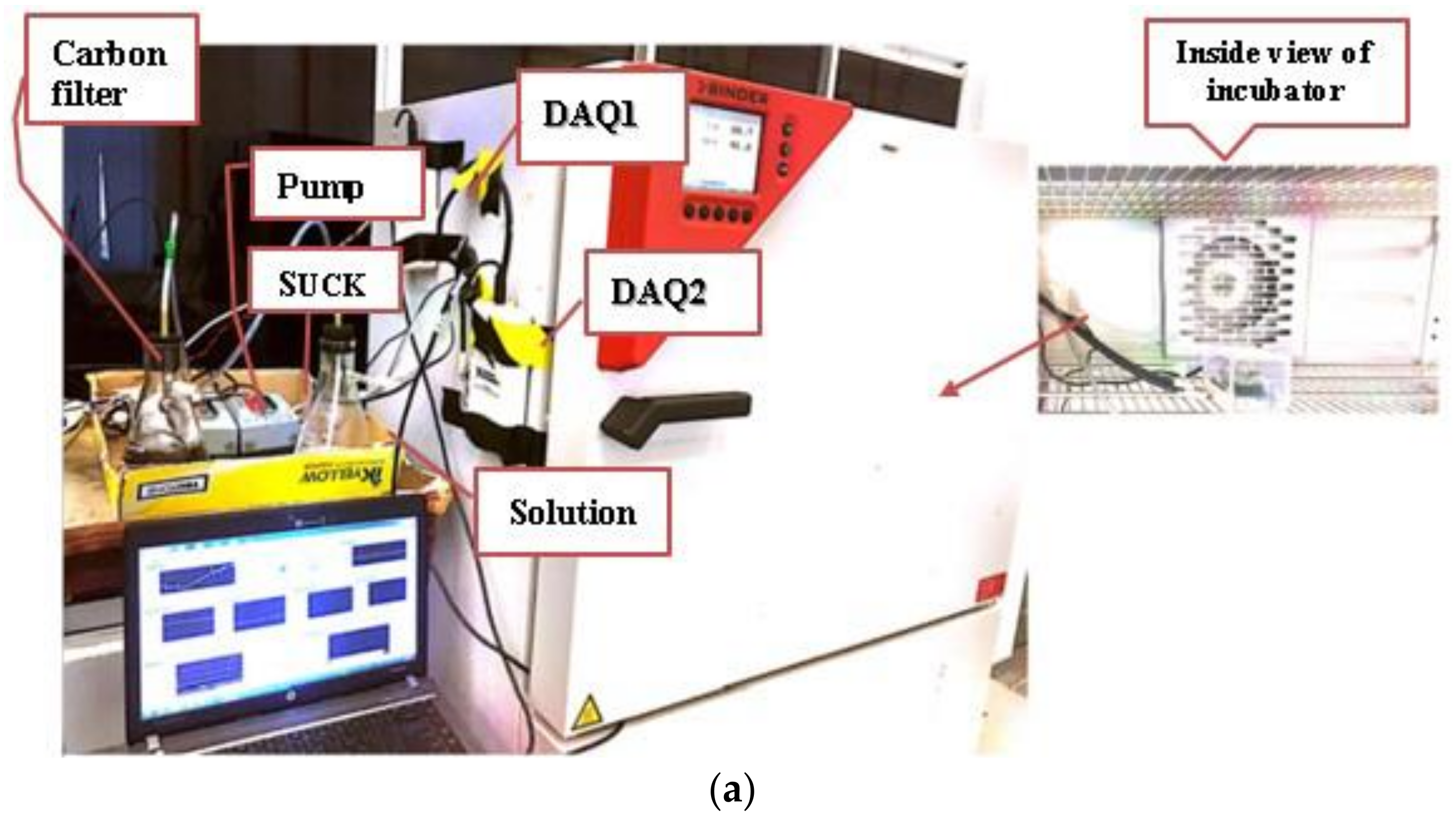
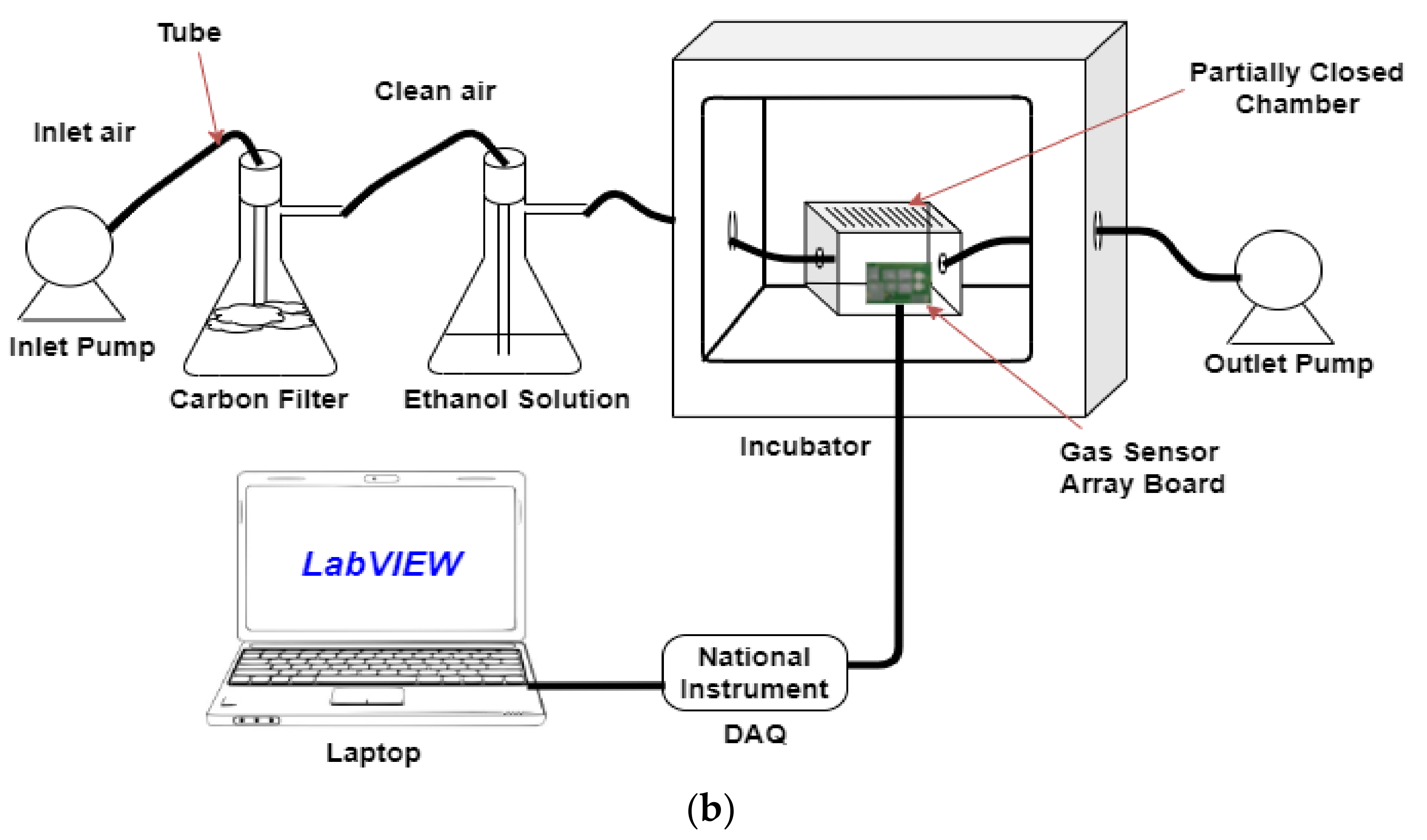
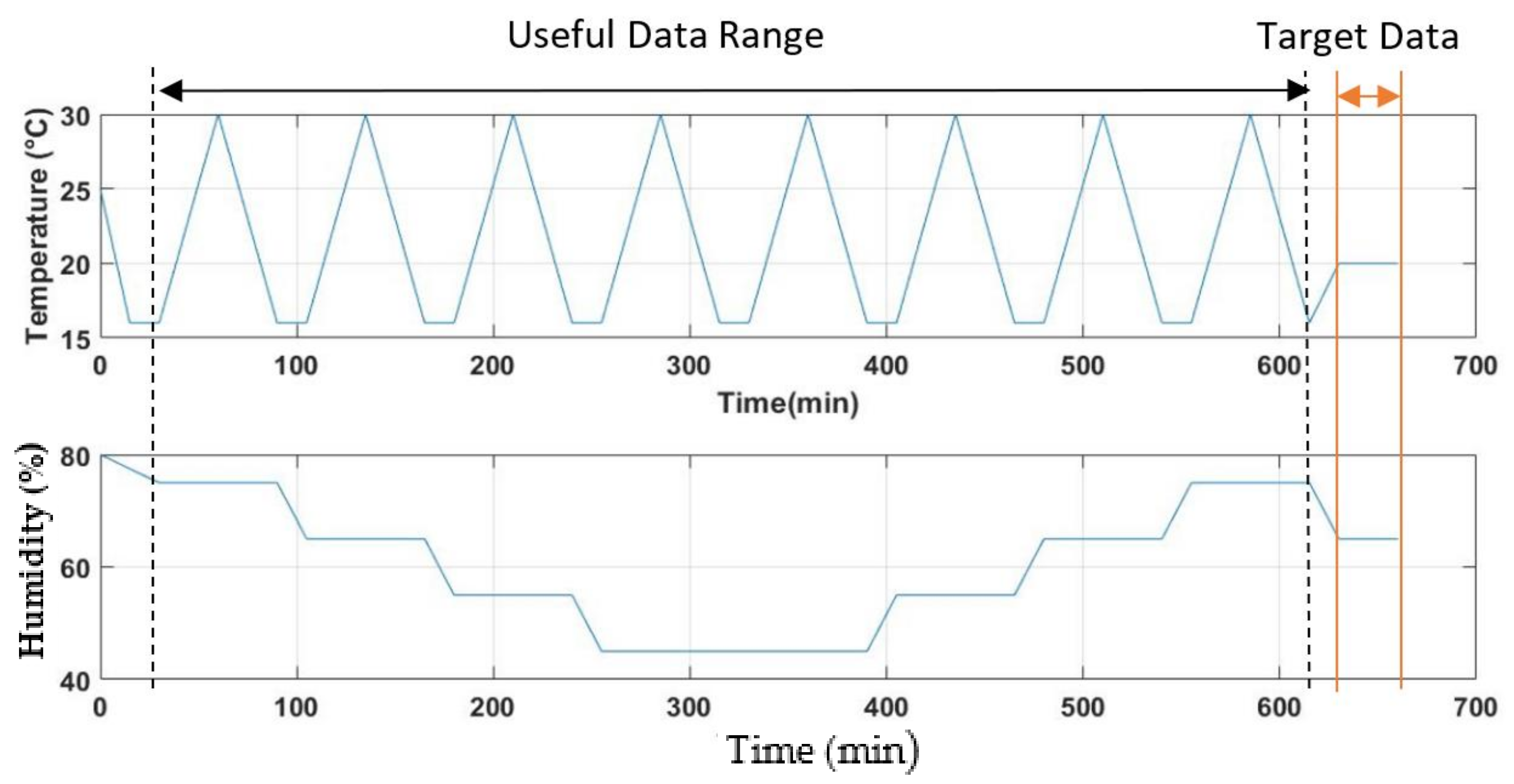
2.3. Experimental Setup and Data Collection
2.4. Data Analysis
3. Results and Discussion
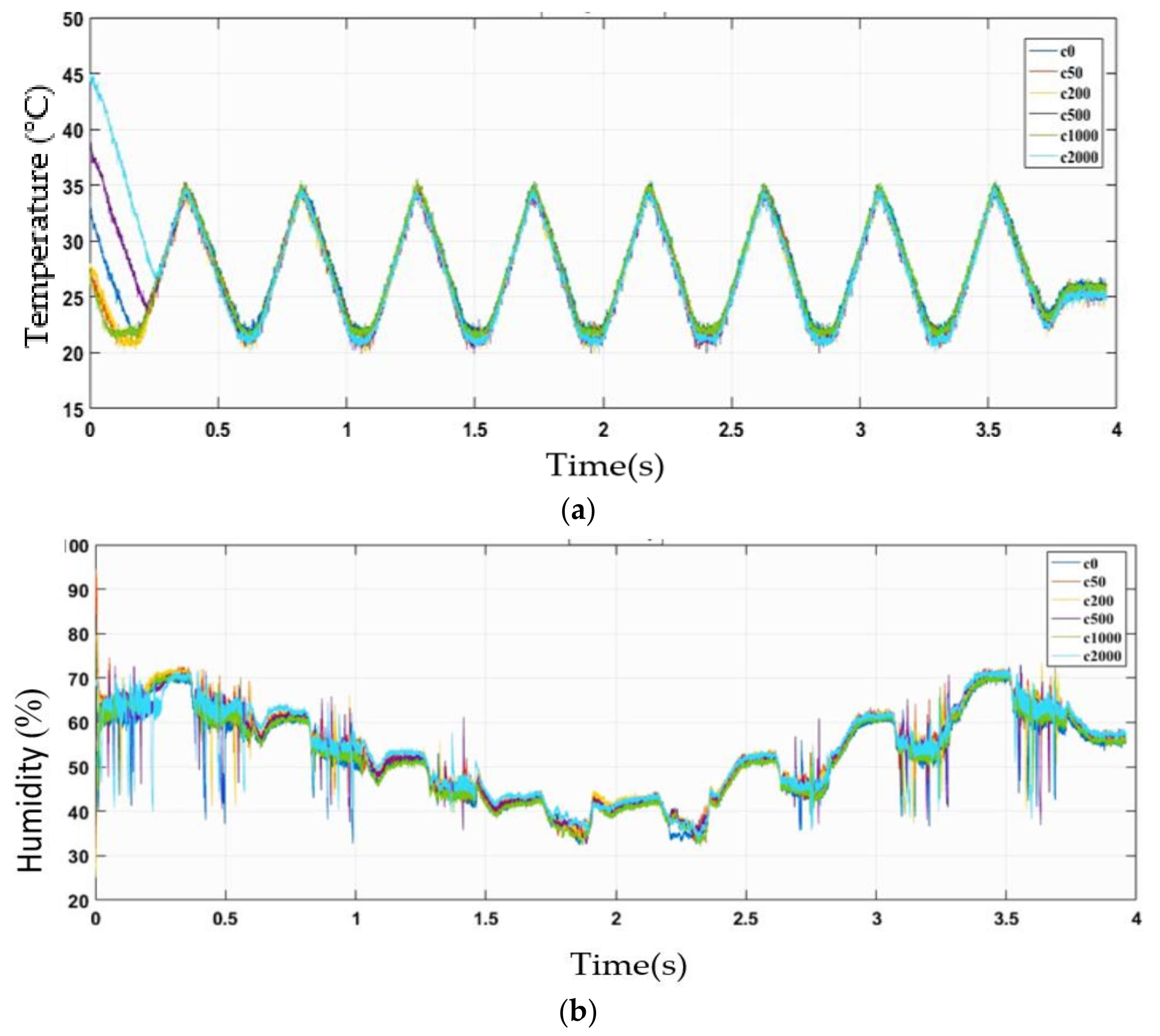
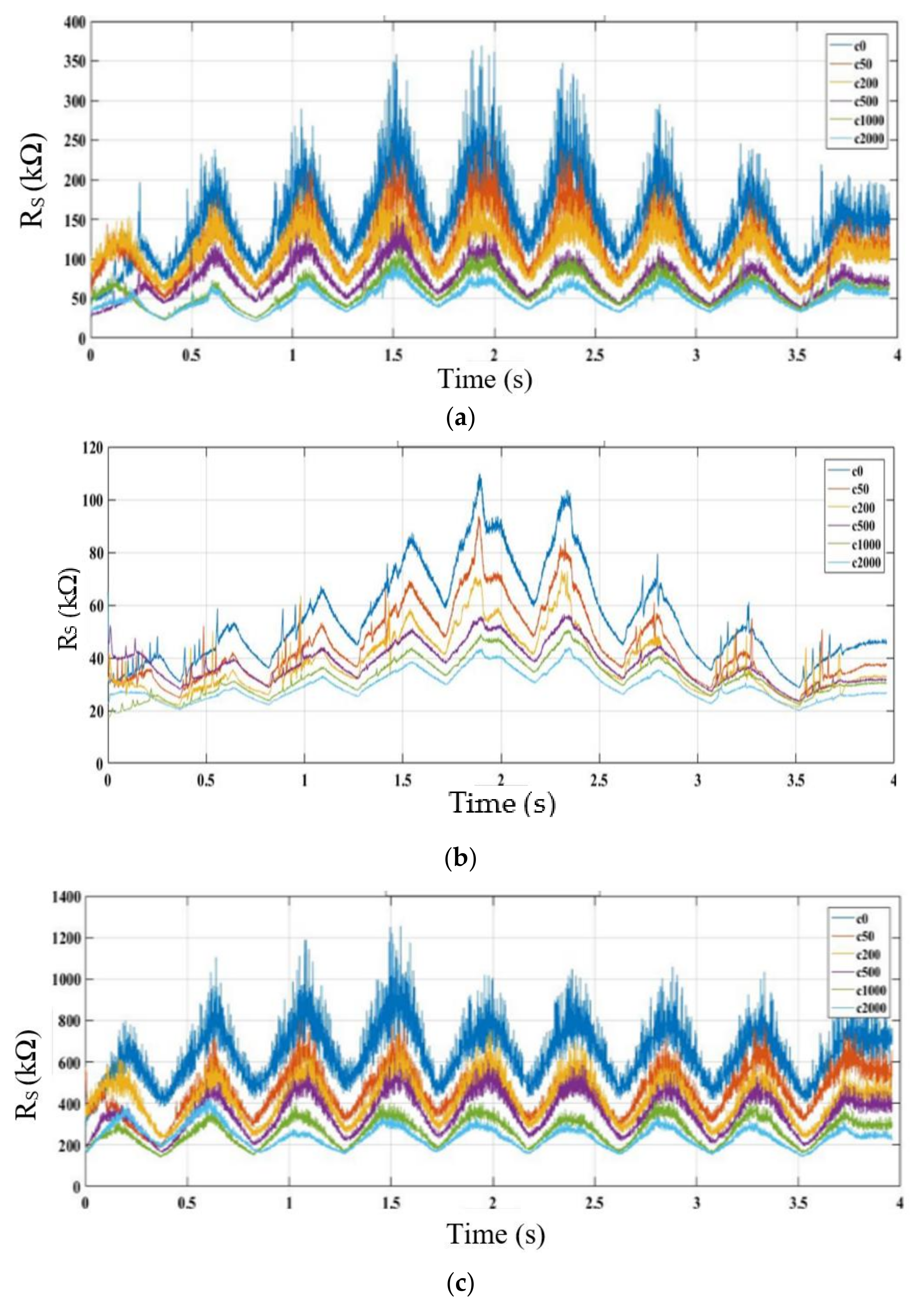
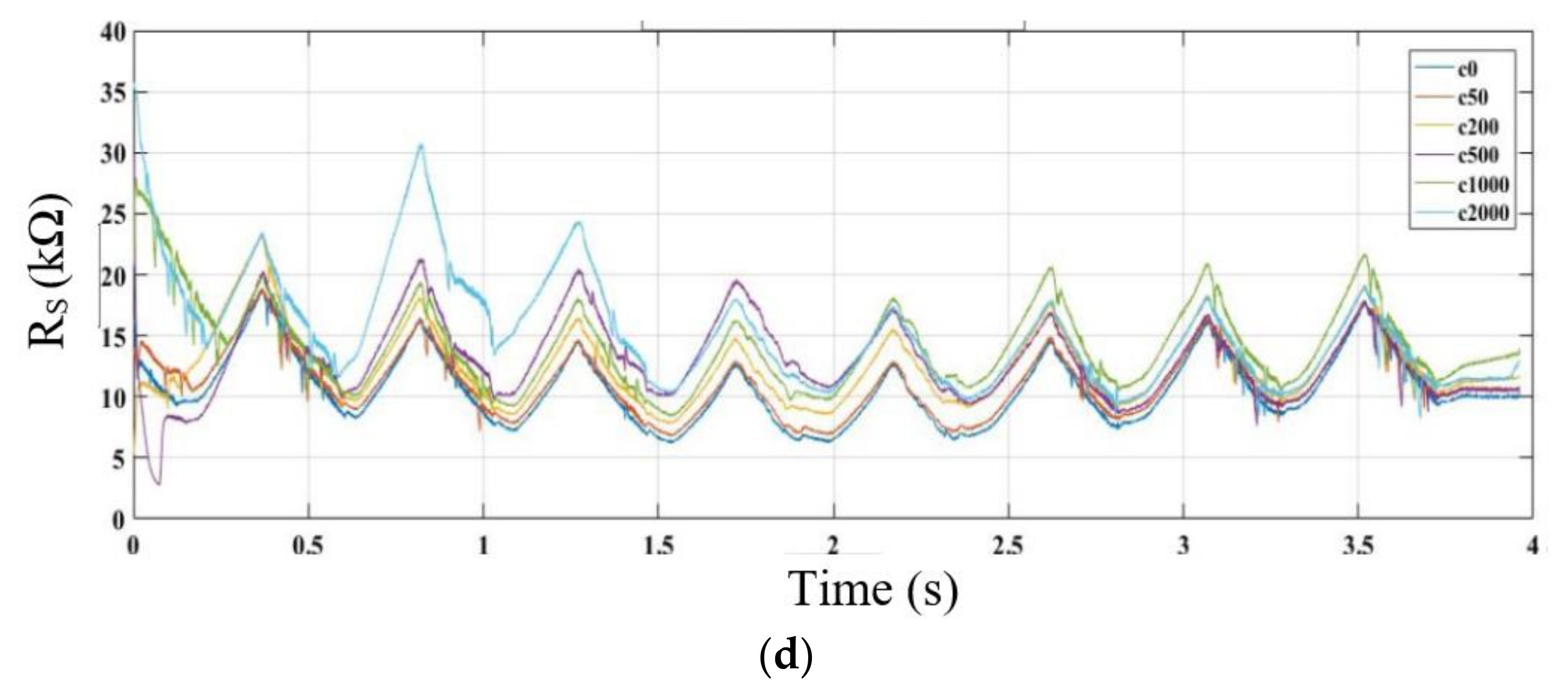
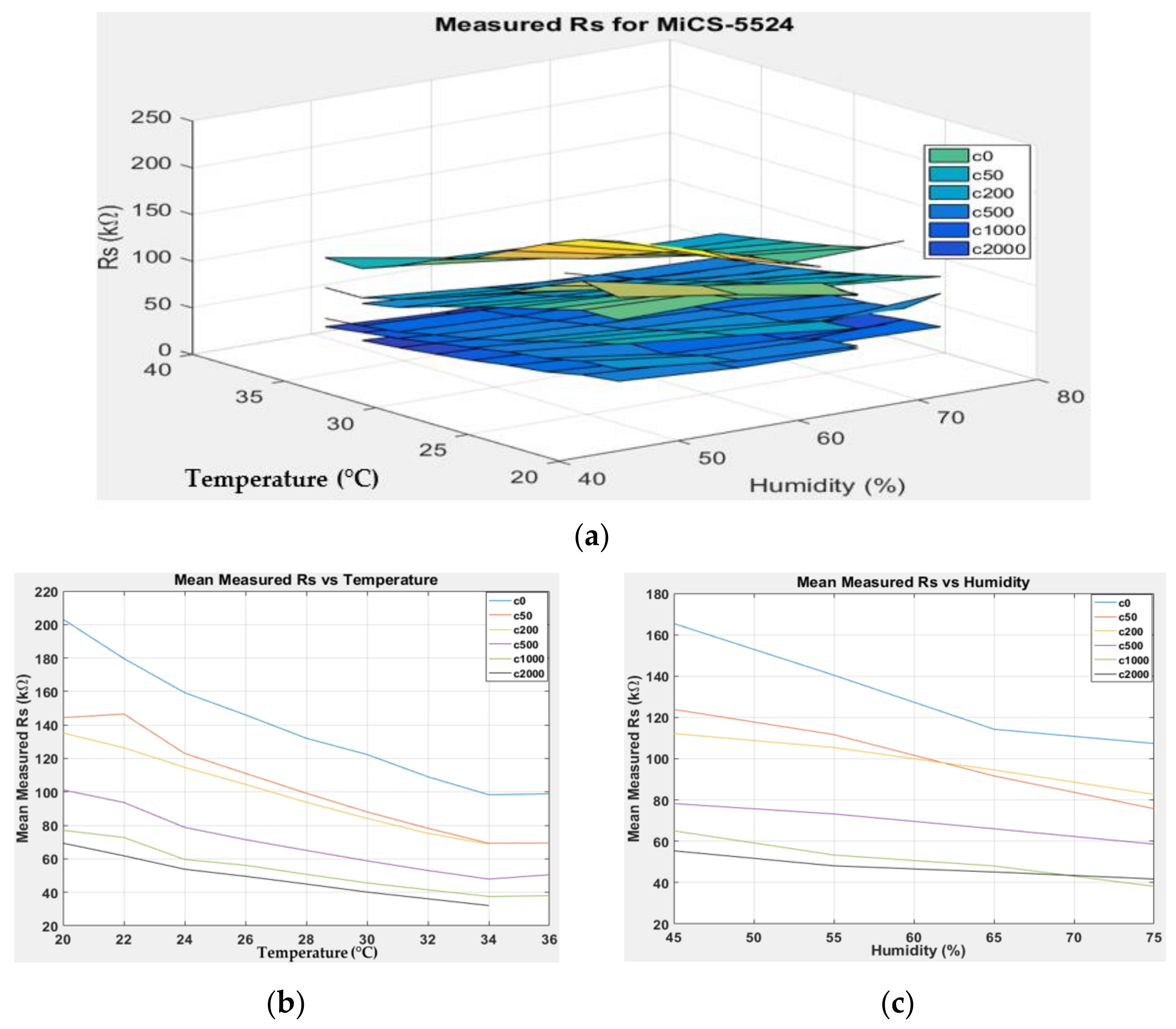
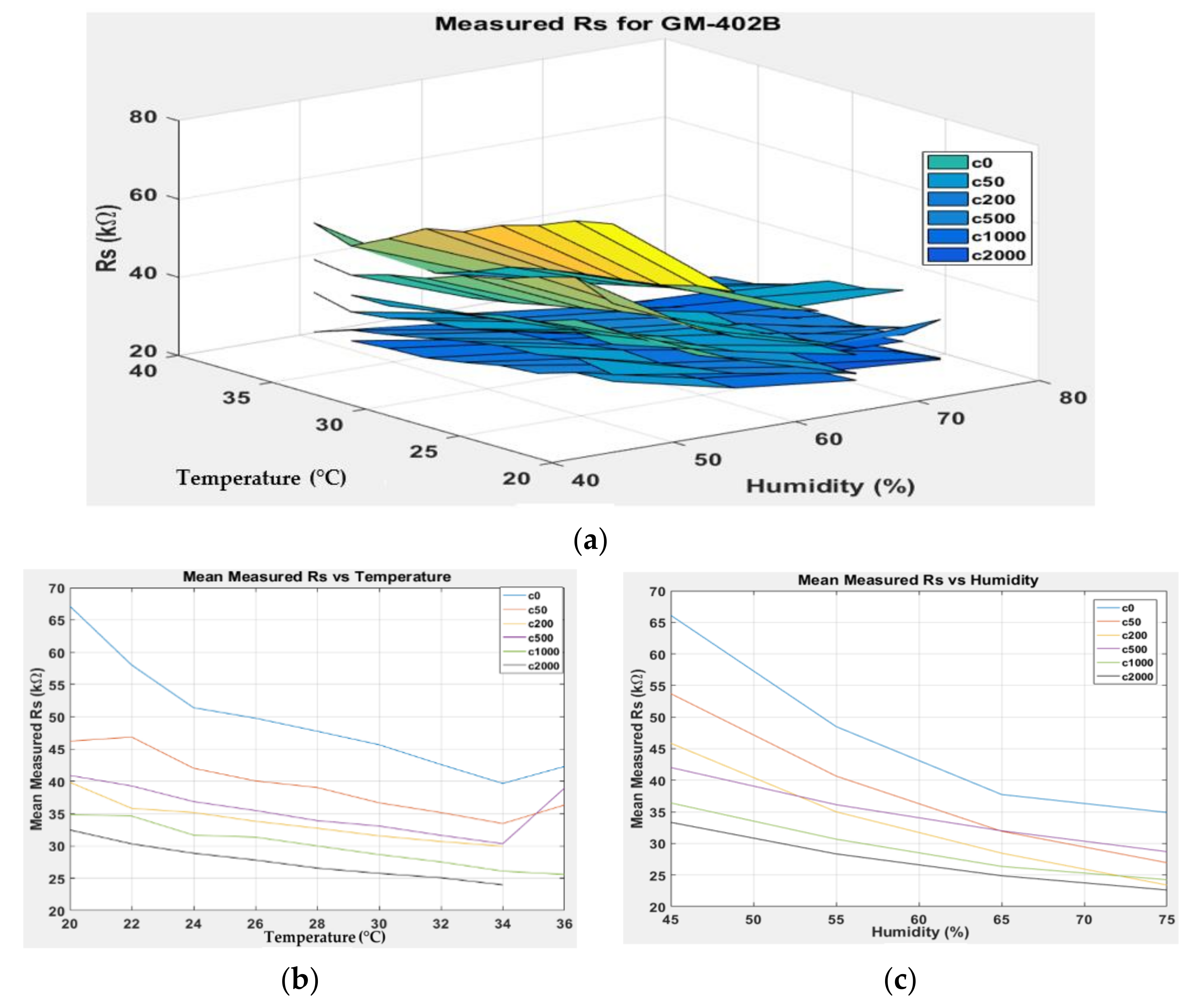
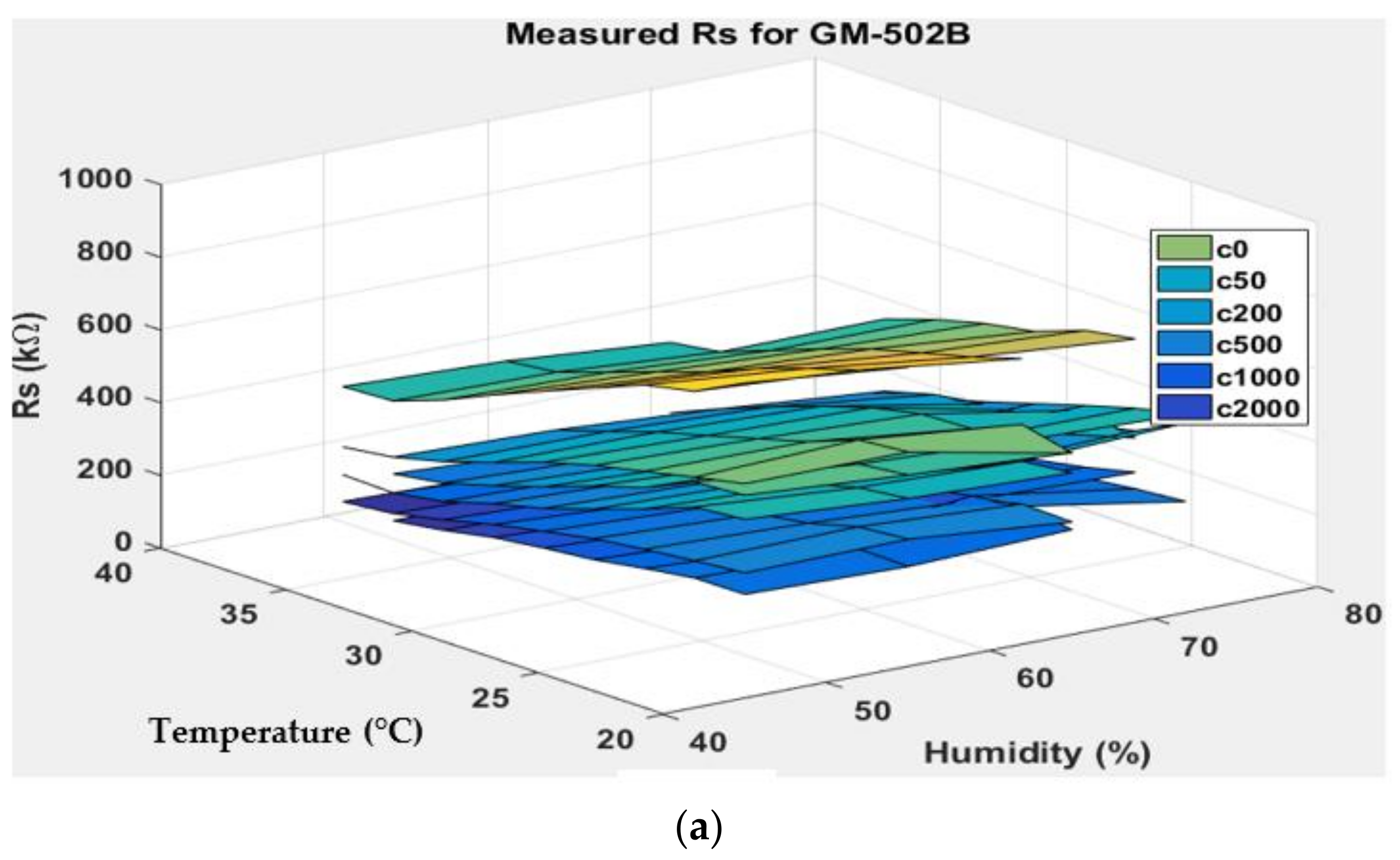
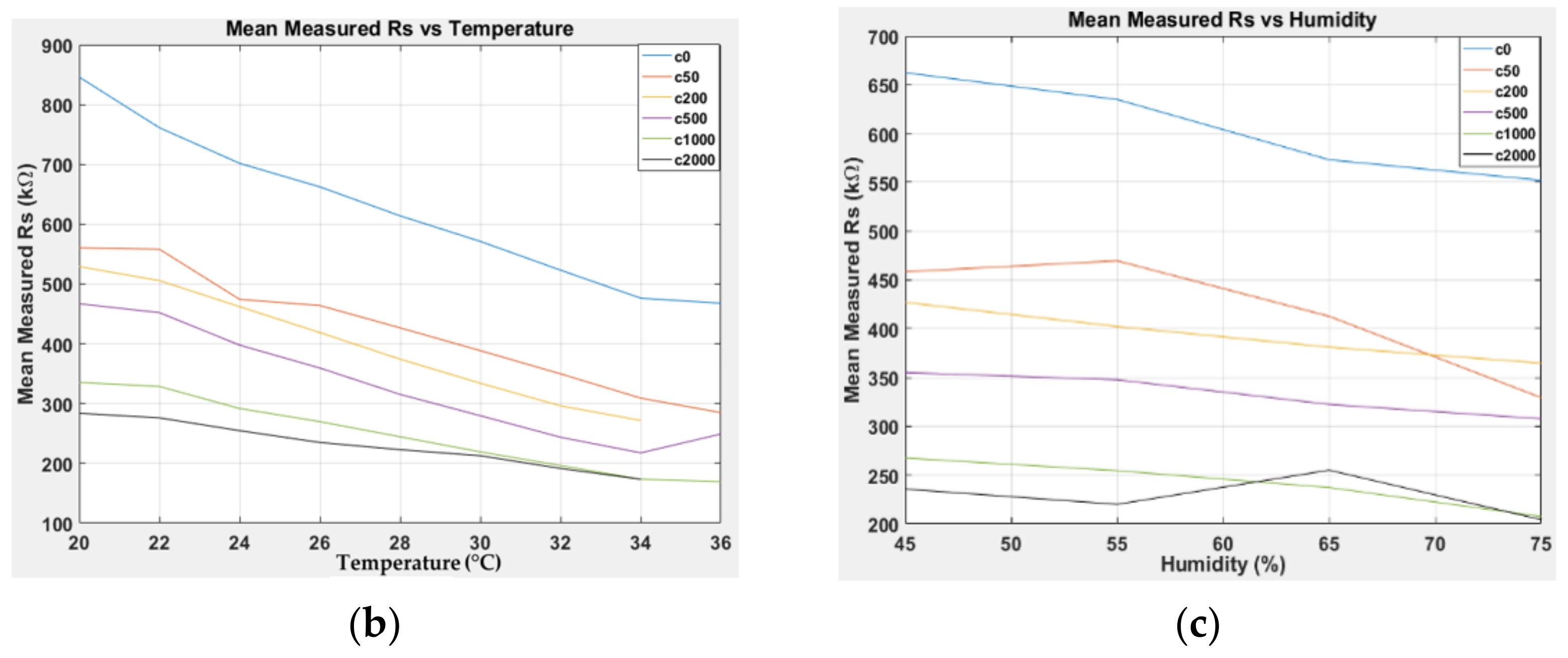
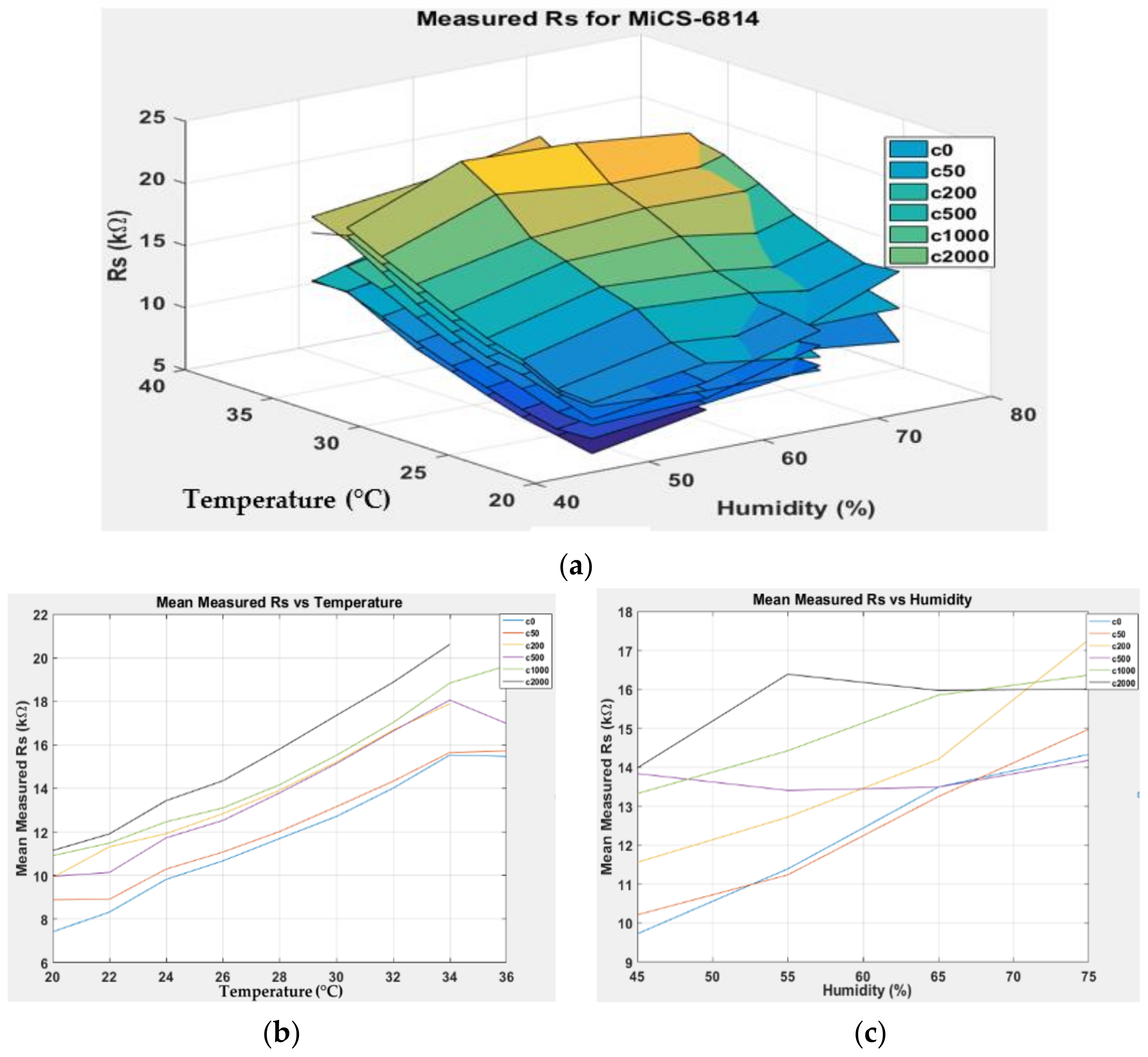
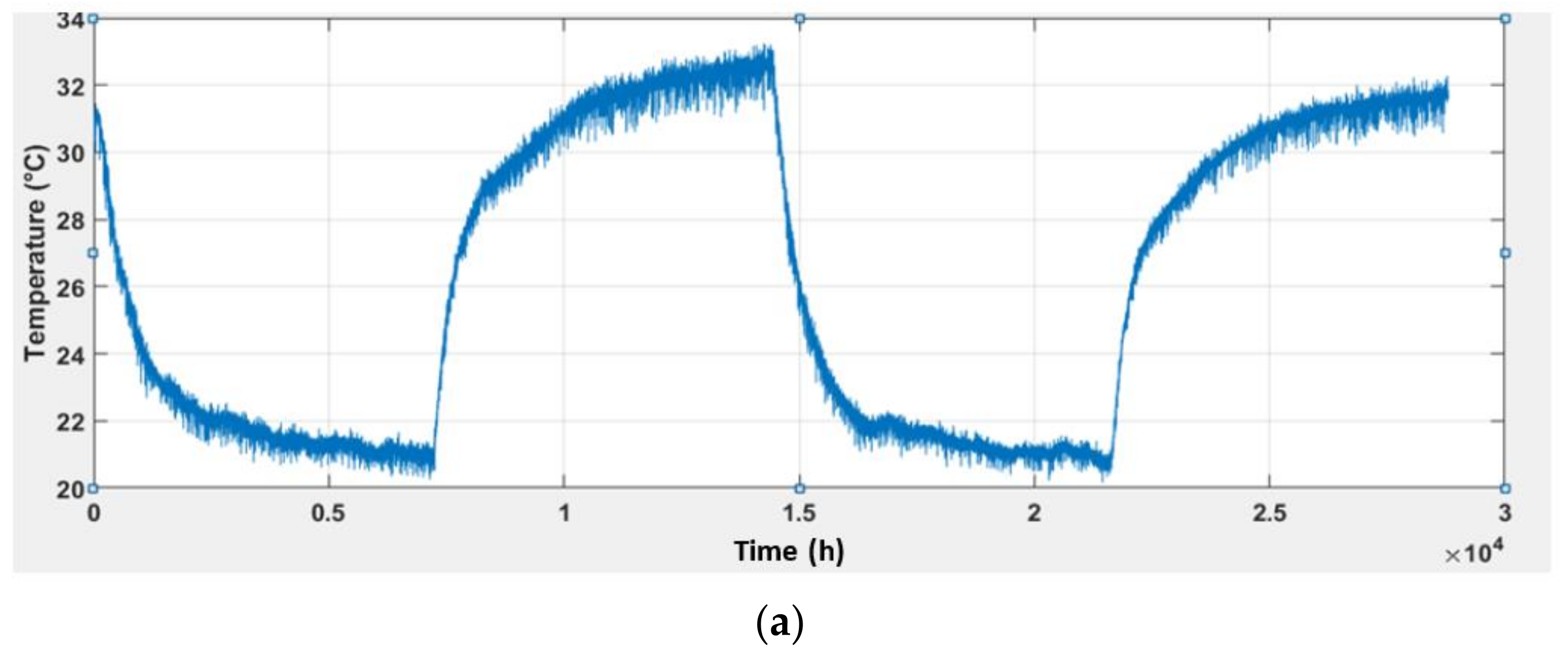
3.1. Effect of Temperature and Humidity on Gas Sensor Response
- The sensor responses decrease almost linearly with increasing temperature.
- The sensor responses decrease almost linearly with increasing humidity.
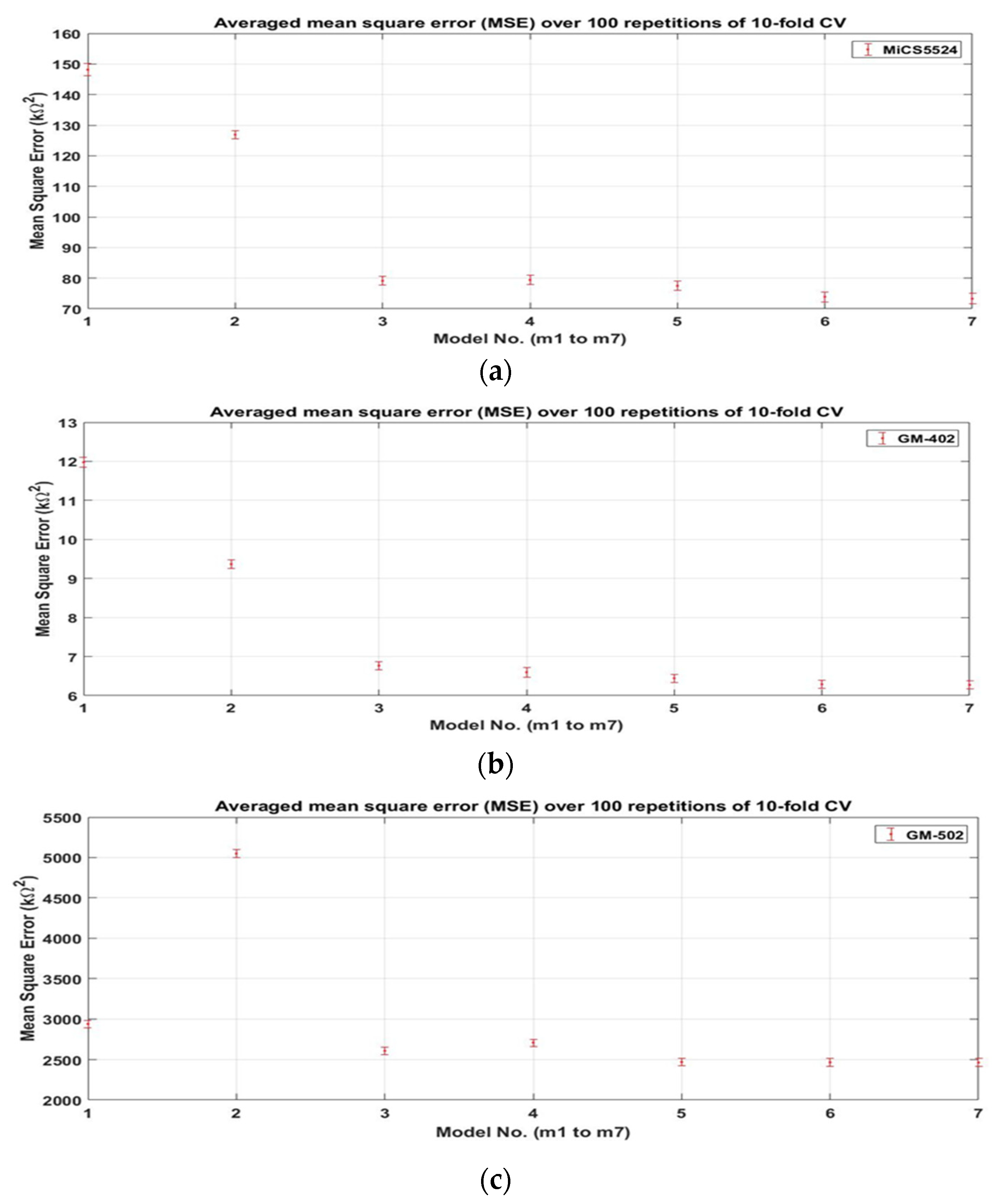
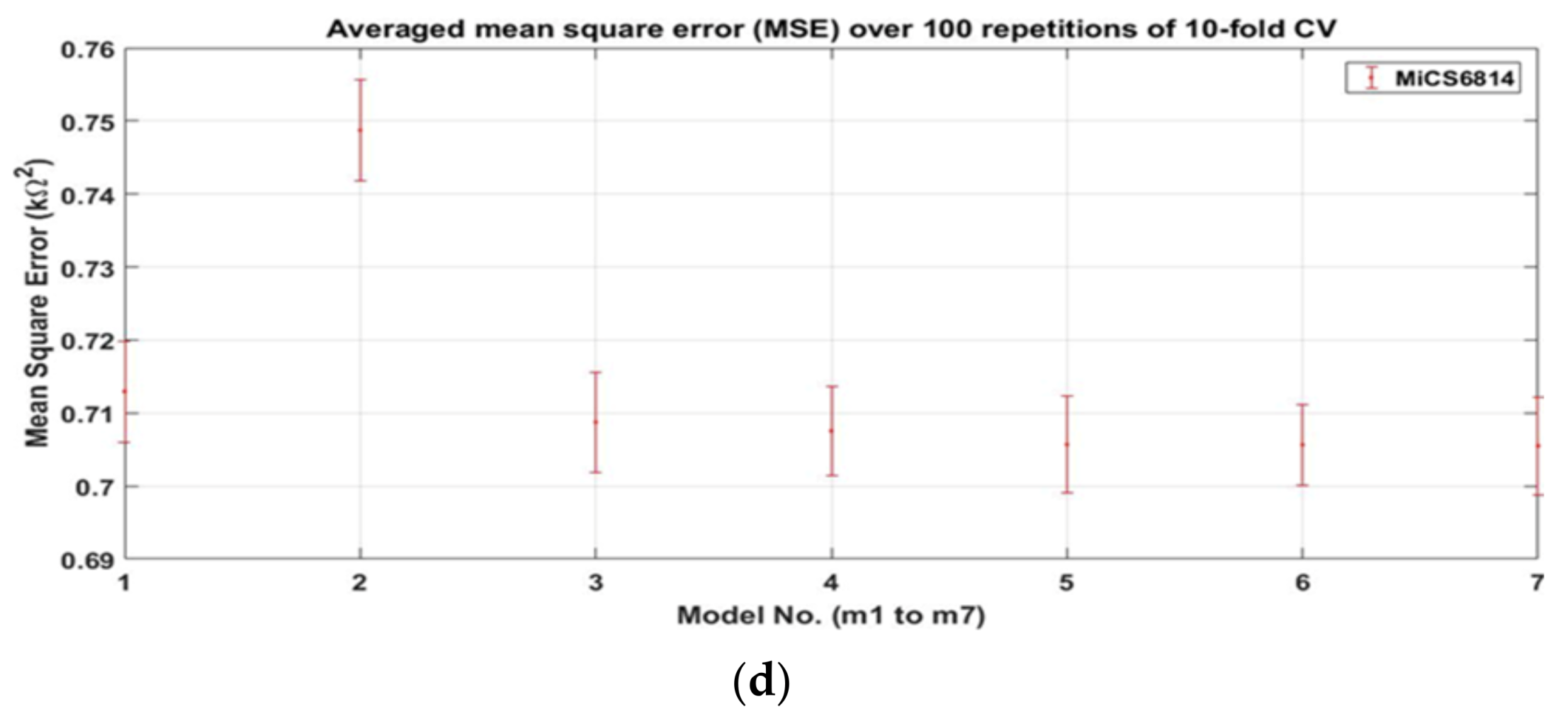
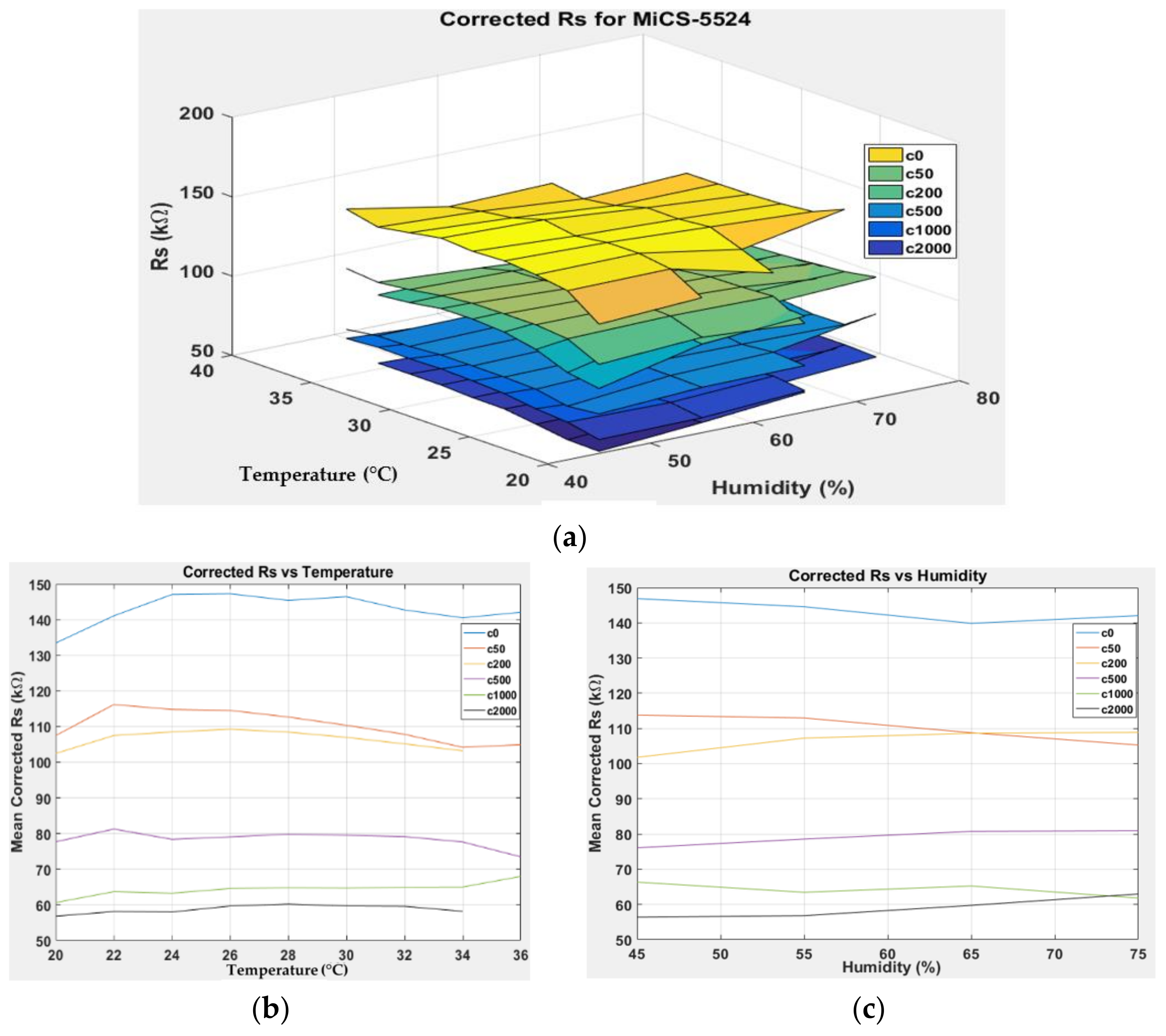
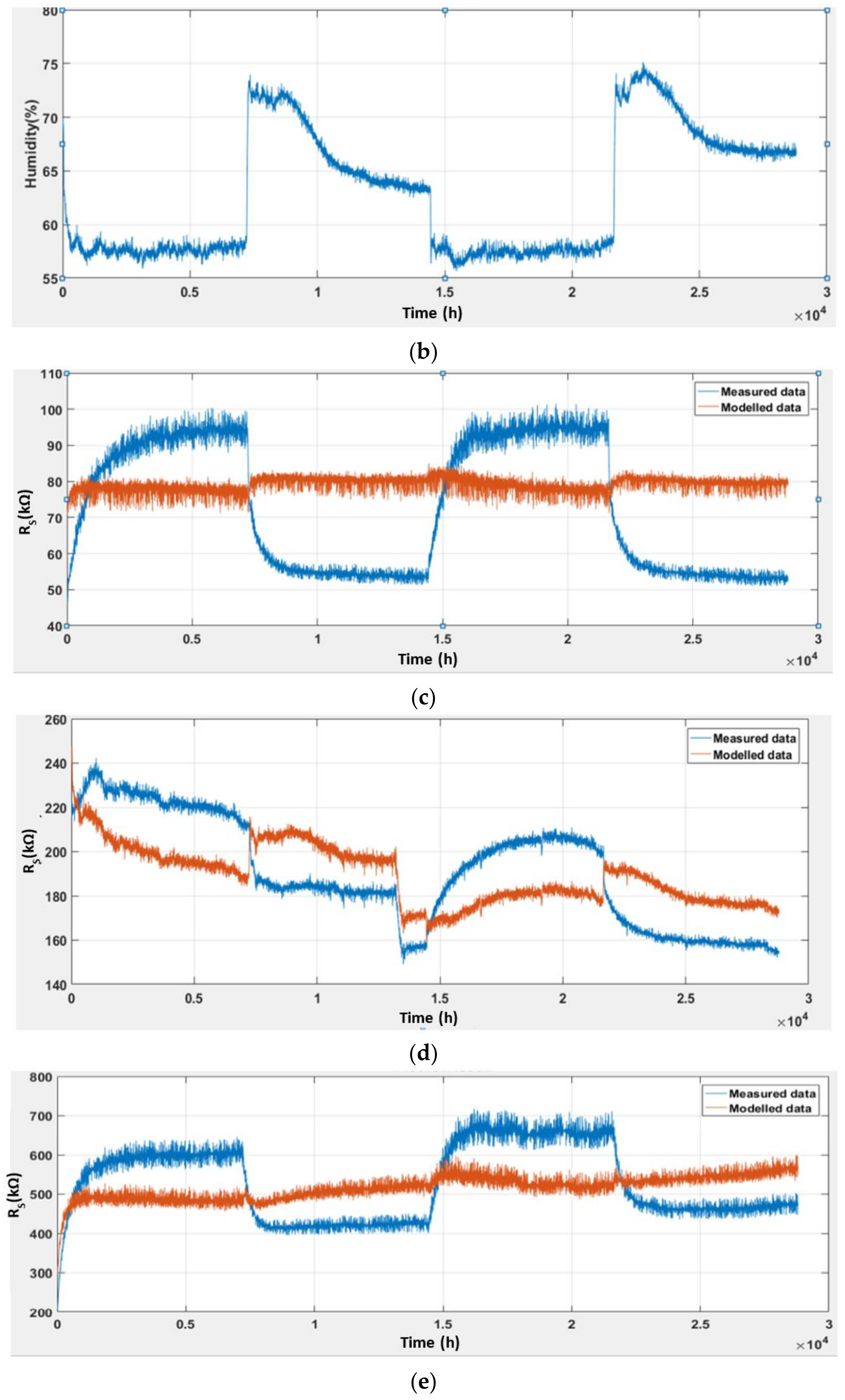
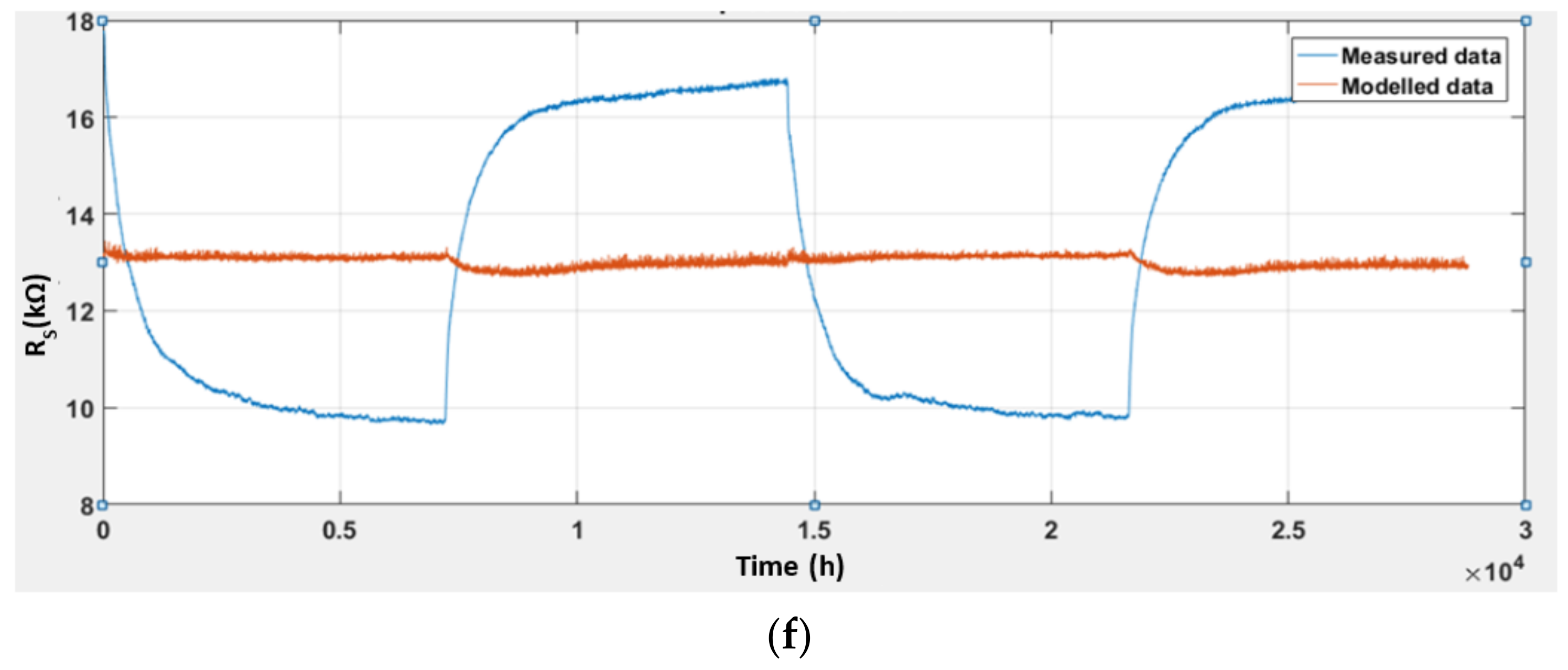
3.2. Correction Model for Sensor Drift Caused by Ambient Temperature and Humidity
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Arroyo, P.; Lozano, J.; Suárez, J.I. Evolution of wireless sensor network for air quality measurements. Electronics 2018, 7, 342. [Google Scholar] [CrossRef] [Green Version]
- Korotcenkov, G.; Cho, B.K. Metal oxide composites in conductometric gas sensors: Achievements and challenges. Sens. Actuators B Chem. 2017, 244, 182–210. [Google Scholar] [CrossRef]
- Nair, S.S.; Illyaskutty, N.; Tam, B.; Yazaydin, A.O.; Emmerich, K.; Steudel, A.; Hashem, T.; Schöttner, L.; Wöll, C.; Kohler, H.; et al. ZnO@ZIF-8: Gas sensitive core-shell hetero-structures show reduced cross-sensitivity to humidity. Sens. Actuators B Chem. 2020, 304, 127184. [Google Scholar] [CrossRef]
- Burgués, J.; Marco, S. Low power operation of temperature-modulated metal oxide semiconductor gas sensors. Sensors 2018, 18, 339. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yamaguchi, Y.; Imamura, S.; Nishio, K.; Fujimoto, K. Influence of temperature and humidity on the electrical sensing of Pt/WO3 thin film hydrogen gas sensor. J. Ceram. Soc. Jpn. 2016, 124, 629–633. [Google Scholar] [CrossRef] [Green Version]
- Burgmair, M.; Zimmer, M.; Eisele, I. Humidity and temperature compensation in work function gas sensor FETs. Sens. Actuators B Chem. 2003, 93, 271–275. [Google Scholar] [CrossRef]
- Hirobayashi, S.; Kimura, H.; Oyabu, T. Dynamic model to estimate the dependence of gas sensor characteristics on temperature and humidity in environment. Sens. Actuators B Chem. 1999, 60, 78–82. [Google Scholar] [CrossRef]
- Wozniak, L.; Kalinowski, P.; Jasinski, G.; Jasinski, P. FFT analysis of temperature modulated semiconductor gas sensor response for the prediction of ammonia concentration under humidity interference. Microelectron. Reliab. 2018, 84, 163–169. [Google Scholar] [CrossRef]
- Ponzoni, A.; Baratto, C.; Cattabiani, N.; Falasconi, M.; Galstyan, V.; Nunez-Carmona, E.; Rigoni, F.; Sberveglieri, V.; Zambotti, G.; Zappa, D. Smetal oxide gas sensors, a survey of selectivity issues addressed at the SENSOR lab, Brescia (Italy). Sensors 2017, 17, 714. [Google Scholar] [CrossRef] [Green Version]
- Kadir, R.A.; Li, Z.; Sadek, A.Z.; Abdul Rani, R.; Zoolfakar, A.S.; Field, M.R.; Ou, J.Z.; Chrimes, A.F.; Kalantar-zadeh, K. Electrospun granular hollow SnO2 nanofibers hydrogen gas sensors operating at low temperatures. J. Phys. Chem. C 2014, 118, 3129–3139. [Google Scholar] [CrossRef]
- Potyrailo, R.A.; Surman, C. A passive radio-frequency identification (RFID) gas sensor with self-correction against fluctuations of ambient temperature. Sens. Actuators B Chem. 2013, 185, 587–593. [Google Scholar] [CrossRef] [Green Version]
- Boon-Brett, L.; Bousek, J.; Moretto, P. Reliability of commercially available hydrogen sensors for detection of hydrogen at critical concentrations: Part II—Selected sensor test results. Int. J. Hydrogen Energy 2009, 34, 562–571. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, L.; Li, K.H.H.; Tan, O.K. Microhotplates for metal oxide semiconductor gas sensor applications—Towards the CMOS-MEMS monolithic approach. Micromachines 2018, 9, 557. [Google Scholar] [CrossRef] [Green Version]
- Qi, Q.; Zhang, T.; Zheng, X.; Fan, H.; Liu, L.; Wang, R.; Zeng, Y. Electrical response of Sm2O3-doped SnO2 to C2H2 and effect of humidity interference. Sens. Actuators B Chem. 2008, 134, 36–42. [Google Scholar] [CrossRef]
- Wang, C.; Yin, L.; Zhang, L.; Xiang, D.; Gao, R. Metal oxide gas sensors: Sensitivity and influencing factors. Sensors 2010, 10, 2088–2106. [Google Scholar] [CrossRef] [Green Version]
- Chauhan, M.; Singh, V.K. Fiber optic pH sensor using TiO2-SiO2 composite layer with a temperature cross-sensitivity feature. Optik 2020, 212, 164709. [Google Scholar] [CrossRef]
- Ghosh, A.; Maity, A.; Banerjee, R.; Majumder, S.B. Volatile organic compound sensing using copper oxide thin films: Addressing the cross sensitivity issue. J. Alloys Compd. 2017, 692, 108–118. [Google Scholar] [CrossRef]
- Heinisch, M.; Reichel, E.K.; Dufour, I.; Jakoby, B. Modeling and experimental investigation of resonant viscosity and mass density sensors considering their cross-sensitivity to temperature. Procedia Eng. 2014, 87, 472–475. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Ni, X.; Wu, Y.; Zhang, W. Study on effect of temperature and humidity on the CO2 concentration measurement. IOP Conf. Ser. Earth Environ. Sci. 2017, 81, 012083. [Google Scholar] [CrossRef] [Green Version]
- Padilla, M.; Perera, A.; Montoliu, I.; Chaudry, A.; Persaud, K.; Marco, S. Drift compensation of gas sensor array data by Orthogonal Signal Correction. Chemom. Intell. Lab. Syst. 2010, 100, 28–35. [Google Scholar] [CrossRef]
- Liang, Z.; Tian, F.; Yang, S.X.; Zhang, C.; Sun, H.; Liu, T. Study on interference suppression algorithms for electronic noses: A review. Sensors 2018, 18, 1179. [Google Scholar] [CrossRef] [Green Version]
- Badura, M.; Batog, P.; Drzeniecka-Osiadacz, A.; Modzel, P. Regression methods in the calibration of low-cost sensors for ambient particulate matter measurements. SN Appl. Sci. 2019, 1, 622. [Google Scholar] [CrossRef] [Green Version]
- Sohn, J.H.; Atzeni, M.; Zeller, L.; Pioggia, G. Characterisation of humidity dependence of a metal oxide semiconductor sensor array using partial least squares. Sens. Actuators B Chem. 2008, 131, 230–235. [Google Scholar] [CrossRef]
- Ojha, V.K.; Dutta, P.; Saha, H.; Ghosh, S. Linear regression based statistical approach for detecting proportion of component gases in manhole gas mixture. In Proceedings of the 2012 1st International Symposium on Physics and Technology of Sensors (ISPTS-1), Pune, India, 7–10 March 2012; pp. 17–20. [Google Scholar]
- Kamarudin, K.B. An Improved Mobile Robot Based Gas Source Localization with Temperature and Humidity Compensation via SLAM and Gas Distribution Mapping. Ph.D. Thesis, School of Mechatronic Engineering, Arau, Malaysia, 2016. [Google Scholar]
- Kamarudin, K.; Bennetts, V.H.; Mamduh, S.M.; Visvanathan, R.; Yeon, A.S.A.; Shakaff, A.Y.M.; Zakaria, A.; Abdullah, A.H.; Kamarudin, L.M. Cross-sensitivity of metal oxide gas sensor to ambient temperature and humidity: Effects on gas distribution mapping. AIP Conf. Proc. 2017, 1808, 020025. [Google Scholar] [CrossRef]
- Abdullah, A.N.; Kamarudin, K.; Mamduh, S.M.; Adom, A.H. Development of MOX Gas Sensors Module for Indoor Air Contaminant Measurement. IOP Conf. Ser. Mater. Sci. Eng. 2019, 705, 12029. [Google Scholar] [CrossRef]
- Abdullah, A.N.; Kamarudin, K.; Mamduh, S.M.; Adom, A.H.; Juffry, Z.H.M. Effect of environmental temperature and humidity on different metal oxide gas sensors at various gas concentration levels. IOP Conf. Ser. Mater. Sci. Eng. 2020, 864, 12152. [Google Scholar] [CrossRef]
- SGX Sensortech. The MiCS-5524 Is a Compact MOS Sensor; SGX Sensortech: Neuchatel, Switzerland, 2017; pp. 1–5. [Google Scholar]
- Winsen. MEMS Combustible Gas Sensor (GM: 402B); Winsen: Singapore, 2015. [Google Scholar]
- Winsen. MEMS VOC Gas Sensor (Model No.: GM 502B); Winsen: Singapore, 2017. [Google Scholar]
- SGX Sensortech. MiCS-6814 Data Sheet, 1143 rev 8; SGX Sensortech: Corcelles-Cormondrèche, Switzerland, 2017; pp. 1–5. Available online: https://www.sgxsensortech.com/content/uploads/2015/02/1143_Datasheet-MiCS-6814-rev-8.pdf (accessed on 21 July 2021).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Target Gases | Detection Range | Features |
|---|---|---|---|
| MiCS-5524 [29] | Carbon monoxide Ethanol Hydrogen Methane | 1–1000 ppm 10–500 ppm 1–1000 ppm >1000 ppm | Smallest footprint for compact design. Robust MEMS sensor for harsh environments. High-volume manufacturing for low-cost applications. |
| GM-402B [30] | Methane Propane | 1–1000 ppm 1–5000 ppm | Low power consumption. High sensitivity. Fast response. Simple drive circuit. |
| GM-502B [31] | Carbon monoxide Nitrogen dioxide Ethanol Hydrogen Propane Methane | 1–1000 ppm 0.005–10 ppm 10–500 ppm 1–1000 ppm >1000 ppm >1000 ppm | Low power consumption. High sensitivity. Fast response. Simple drive circuit. |
| MiCS-6814 [32] | Carbon monoxide Ethanol Hydrogen Methane Propane | 1–1000 ppm 10–500 ppm 1–1000 ppm 1–500 ppm >1000 ppm | Smallest footprint for compact design. Robust MEMS sensor for harsh environments. High-volume manufacturing for low-cost applications. |
| Sensor | Mean of Measured Data (kΩ) | Standard Deviation of Measured Data (kΩ) | Mean of Corrected Data (kΩ) | Standard Deviation of Corrected Data (kΩ) |
|---|---|---|---|---|
| MiCS-5524V2 | 72.59 | 18.22 | 79.30 | 1.66 |
| GM-402BV2 | 190.71 | 24.33 | 189.29 | 13.17 |
| GM-502V2 | 528.92 | 95.18 | 515.77 | 29.67 |
| MiCS-6814V2 | 13.26 | 2.99 | 13.00 | 0.12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdullah, A.N.; Kamarudin, K.; Kamarudin, L.M.; Adom, A.H.; Mamduh, S.M.; Mohd Juffry, Z.H.; Bennetts, V.H. Correction Model for Metal Oxide Sensor Drift Caused by Ambient Temperature and Humidity. Sensors 2022, 22, 3301. https://doi.org/10.3390/s22093301
Abdullah AN, Kamarudin K, Kamarudin LM, Adom AH, Mamduh SM, Mohd Juffry ZH, Bennetts VH. Correction Model for Metal Oxide Sensor Drift Caused by Ambient Temperature and Humidity. Sensors. 2022; 22(9):3301. https://doi.org/10.3390/s22093301
Chicago/Turabian StyleAbdullah, Abdulnasser Nabil, Kamarulzaman Kamarudin, Latifah Munirah Kamarudin, Abdul Hamid Adom, Syed Muhammad Mamduh, Zaffry Hadi Mohd Juffry, and Victor Hernandez Bennetts. 2022. "Correction Model for Metal Oxide Sensor Drift Caused by Ambient Temperature and Humidity" Sensors 22, no. 9: 3301. https://doi.org/10.3390/s22093301