
Downlink Performance Modeling and Evaluation of Batteryless Low Power BLE Node




Abstract
:1. Introduction
2. Related Work
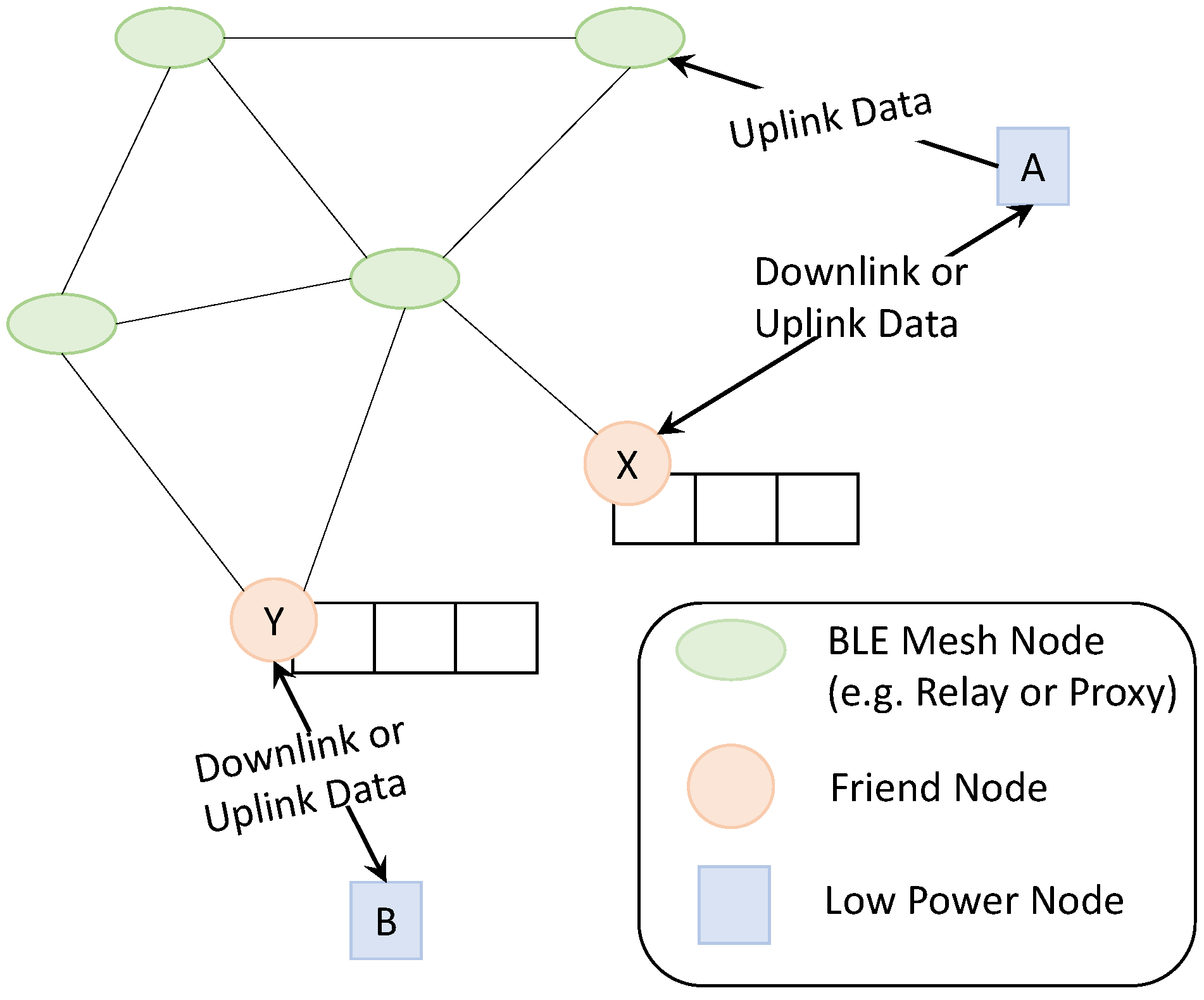
3. BLE Friendship Feature
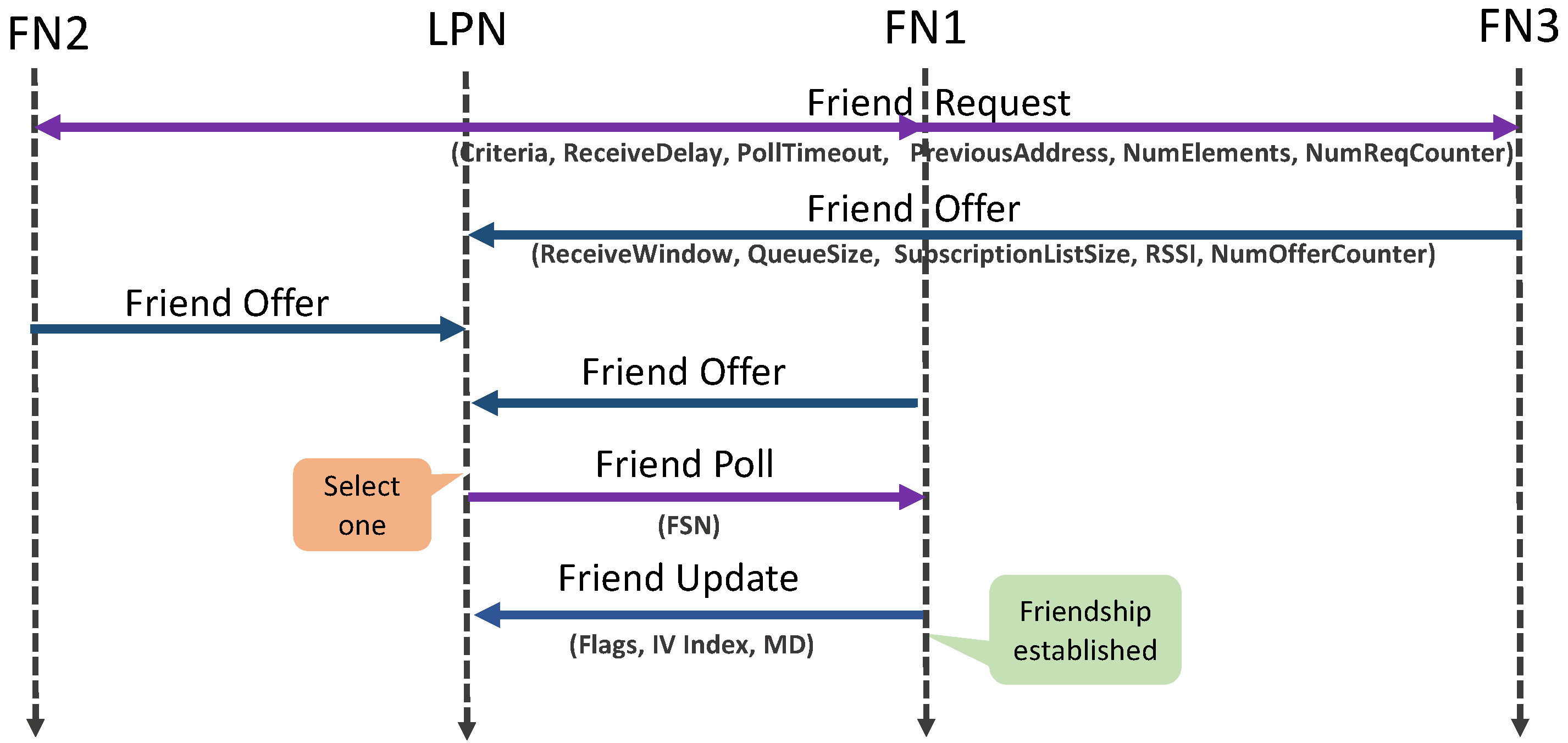
3.1. Friendship Establishment
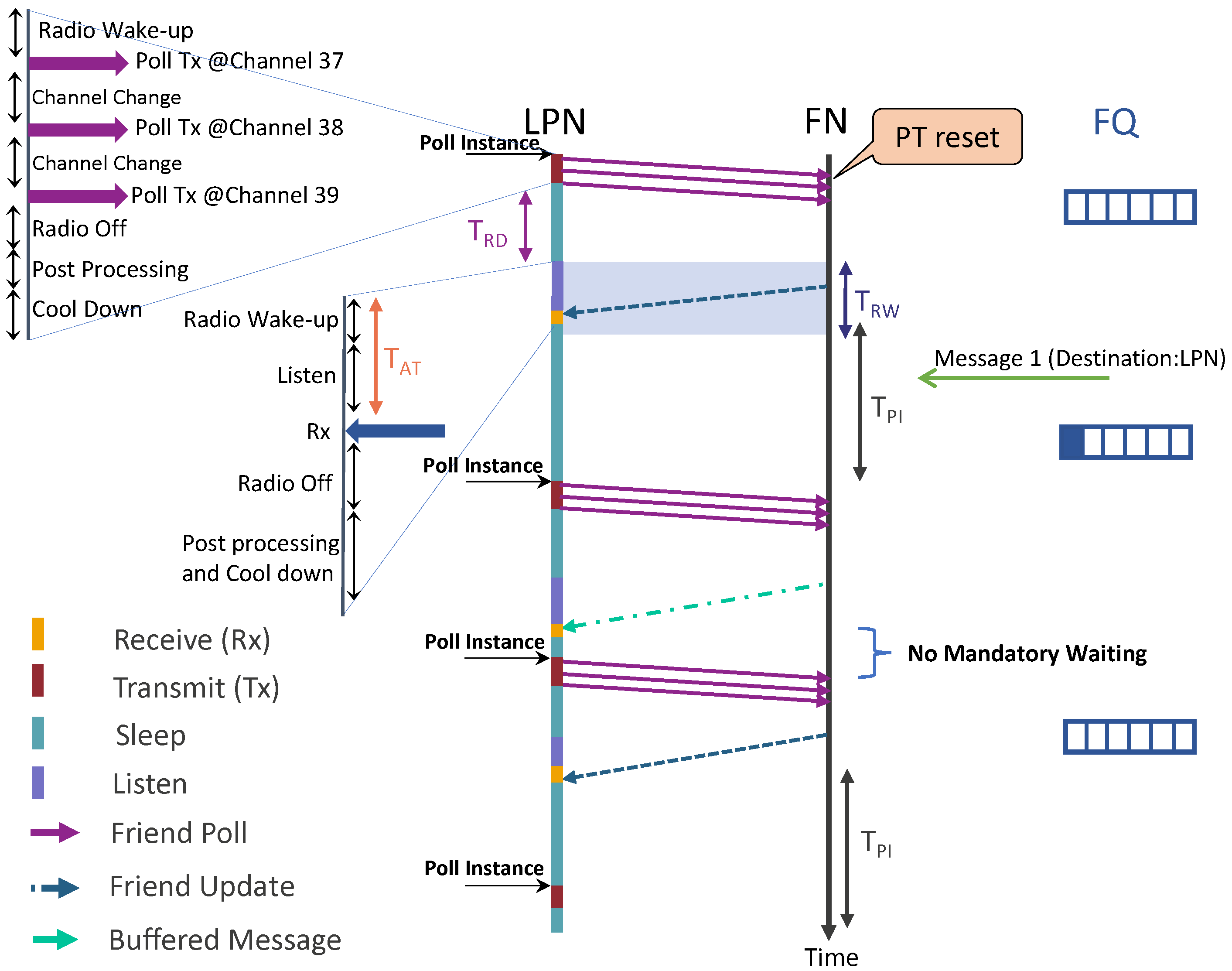
3.2. Receiving Downlink Data
4. Batteryless BLE LPN
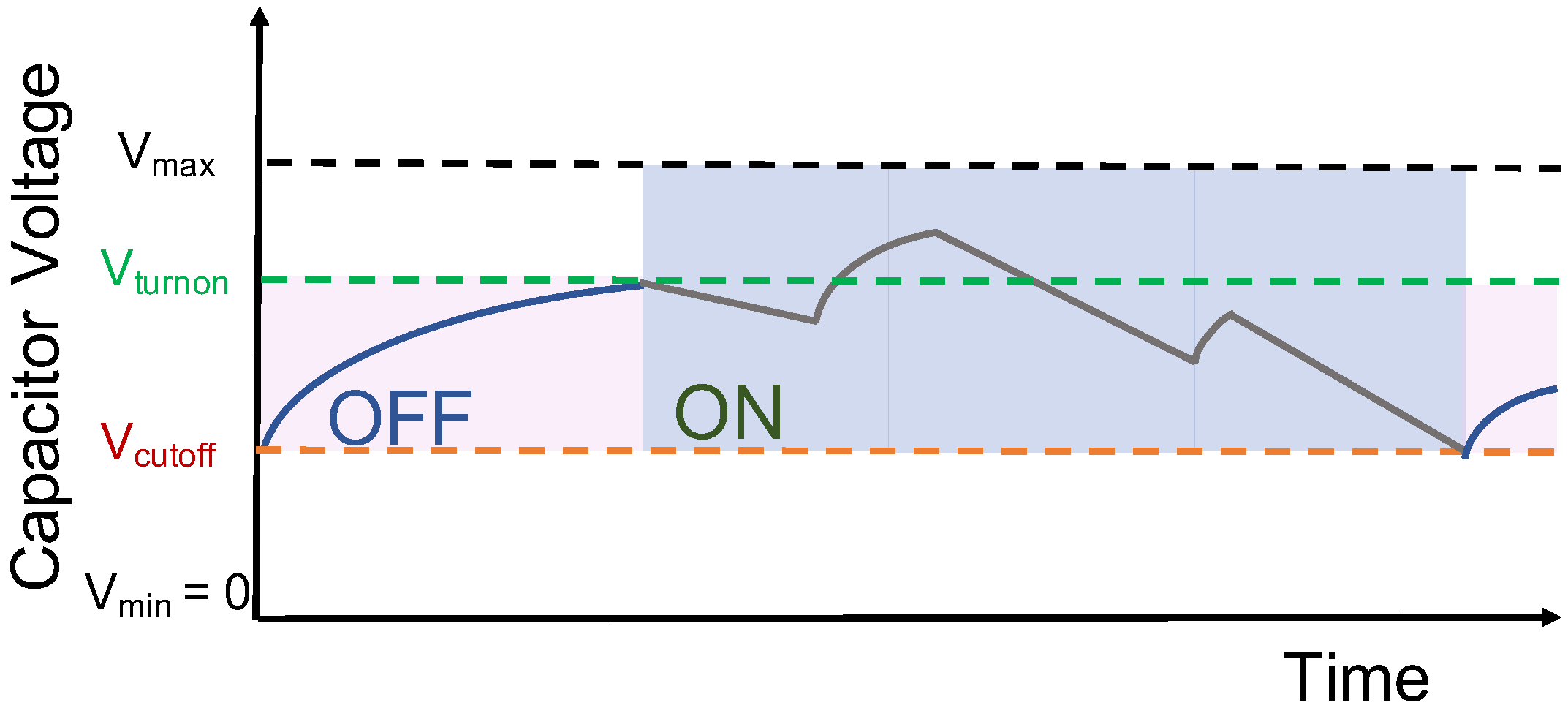
4.1. Capacitor Voltage
4.2. Time to Next Poll
4.2.1. FQ Is Not Empty
- : As is less than the required voltage to poll, the device needs to switch to SLEEP mode to charge the capacitor and avoid its voltage from reaching . Let the node sleep for the time which can be deduced using Equation (1). Therefore, the time between two FPs has an extra wait time of in addition to all the FP state’s timings and is calculated in Equation (3).The capacitor voltage at the start of the next poll instance will be (after the capacitor is charged while the LPN is in SLEEP mode).
4.2.2. FQ Is Empty
- : The time to poll has an extra delay of in addition to all the FP state’s timings.The capacitor voltage at the start of the next poll instance will be .
- : Similar to above, the node needs to switch to SLEEP mode to provide enough time to charge the capacitor. Therefore, the time between two FPs has an additional time and in addition to all the FP state’s timings.The capacitor voltage at the start of the next poll instance is .
5. System Model
5.1. The Queueing Model
5.2. Embedded Markov Chain
5.3. Performance Metrics
- Average FQ occupancy: The FN uses a push-out strategy to manage its FQ, which means when a packet arrives at a full FQ, the oldest packet in the FQ would be dropped. However, the number of packets in the push-out system is the same even if the arriving packet is dropped (drop-tail). Since the probability that an arriving packet finds a full FQ is equal to , the average system occupancy in a ‘drop-tail’ system is given by Equation (17).Now, the average system occupancy in a ‘push-out’ system () is equal to the .
- Average DL latency: The actual arrival rate in a drop-tail system is given by and, applying Little’s well-known formula [21], the average response time in a drop-tail system is given by Equation (18).However, the waiting time of a packet in the system using push-out is quite different from the waiting time in a system using drop-tail. In a drop-tail system, the packets behind a tagged packet do not impact the delay of that packet. However, in a push-out system, packets arriving after the tagged packet may, in case they arrive at a full queue, push out the first packet in the queue and hence influence the delay experienced by the tagged packet. The waiting time in the push-out system consists of two parts: firstly, the time interval between the packet arrival instant (at FQ) and the next inspection instant (i.e., until the end of the vacation if it arrives during a vacation or until the end of a service if it arrives during a service); secondly, the time interval between this inspection instant and the start of the transmission of the packet.
- -
- Between arrival instant and the next inspection instant: There are two scenarios, either the packet arrives during the vacation period or during the service period.
- *
- An arbitrary time instant falls in a vacation: Let be the probability that an arbitrary time instant falls in a vacation period, that there are packets (maximum ) present in the system at time t, and that the remaining vacation time is that satisfies . The LST of this probability has already been determined by Blondia [20]. Hence, the inverse LST can provide us the value of and , as defined in Equation (19).where, n = [0, N − 1] and (t) is a Heaviside function that outputs (0) if t ≤ and (1) if t > .represents the probability that an arbitrary time instant falls in a vacation period, that there are packets (maximum ) present in the system at time , and there are packet arrivals (maximum ) during the remaining vacation time . This probability is given by Equation (20).The probability that at an arbitrary time instant there are packets (maximum ) in the system and that, during the remaining time of the vacation , packets (maximum ) have arrived is given in Equation (21).The average waiting time until the next inspection instant of a packet that arrives at an arbitrary time instant in a vacation period is then given by Equation (22).
- *
- An arbitrary time instant falls in a service: Let be the probability that an arbitrary time instant falls in a service period, that there are packets (maximum ) present in the system at time , and that the remaining service time satisfies . Based on the Laplace transform, [20] can be calculated as Equation (23).The probability that a packet arrives in a service period and packets are present in the FQ at time and packets arrive in the remaining service time is given by Equation (24).Similar to Equation (21), the probability () that, at an arbitrary time instant, there are packets in the system and that during the remaining time of the service packets have arrived can be calculated as Equation (25).The average waiting time of a packet that arrives at an arbitrary time instant in a service period is then given by Equation (26).
- -
- Between this inspection instant and the start of the transmission of the packet: Let be the mean waiting time of a packet in the FQ at the end of a service that will be served and that has packets (maximum ) ahead and packets (maximum ) behind is given by Equation (27).Similar to Equation (27), the mean waiting time of a packet in the FQ at the end of a vacation period that will be served and has packets ahead (maximum and packets (maximum ) behind can be calculated.
The total waiting time of a packet arriving at an arbitrary instant at the FN or average DL latency, served eventually in a system using the push-out strategy, is given by Equation (28).
6. Evaluation
6.1. Simulation Setup
- Packet delivery ratio (PDR): The ratio of packets successfully received by the LPN compared to the total reaching the FQ.
- Downlink packet latency: The average latency to receive a packet by the LPN from the time it arrives at the FQ.
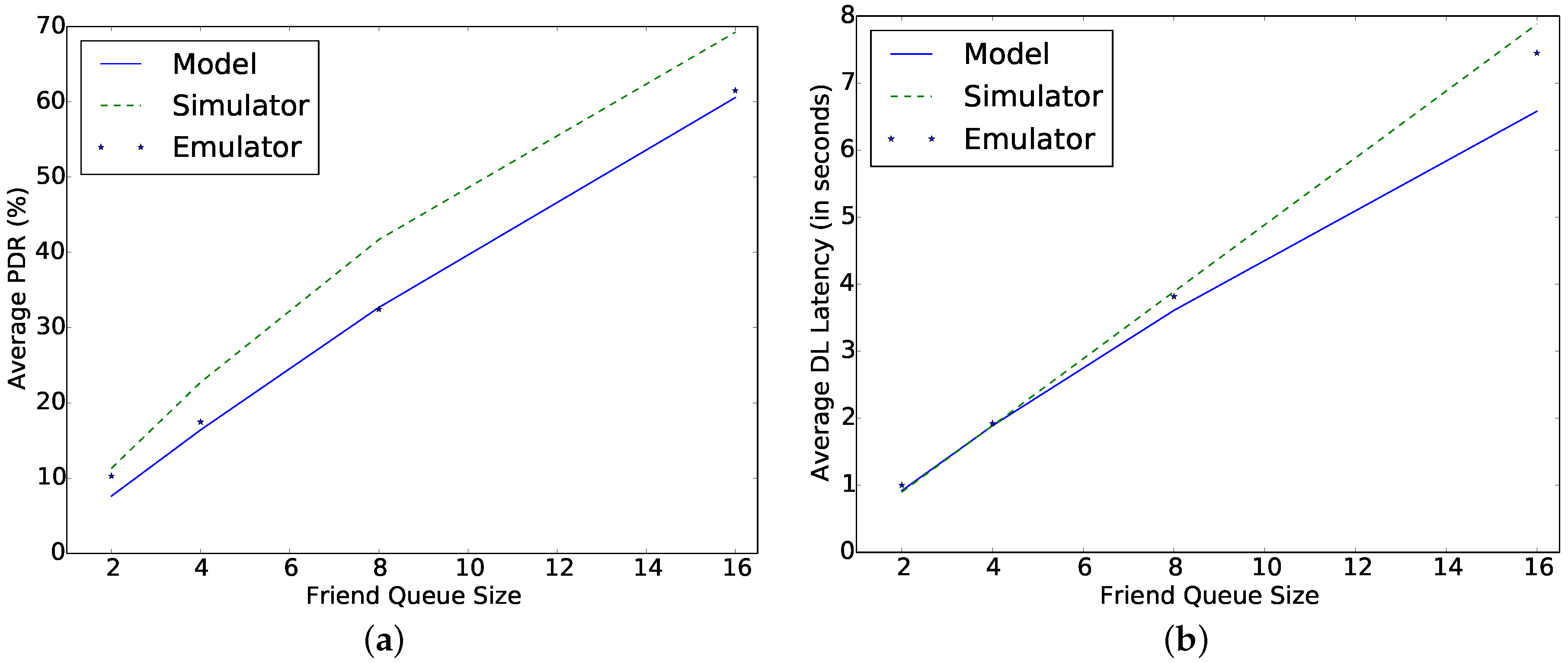
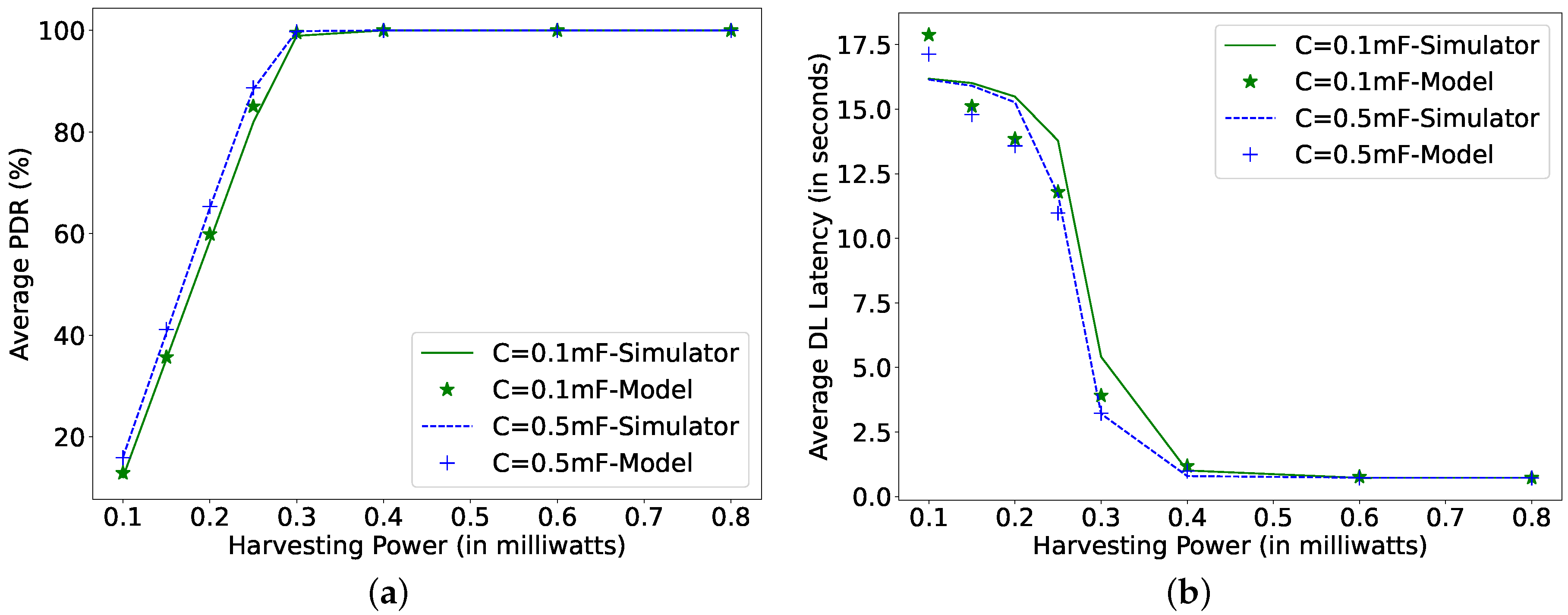
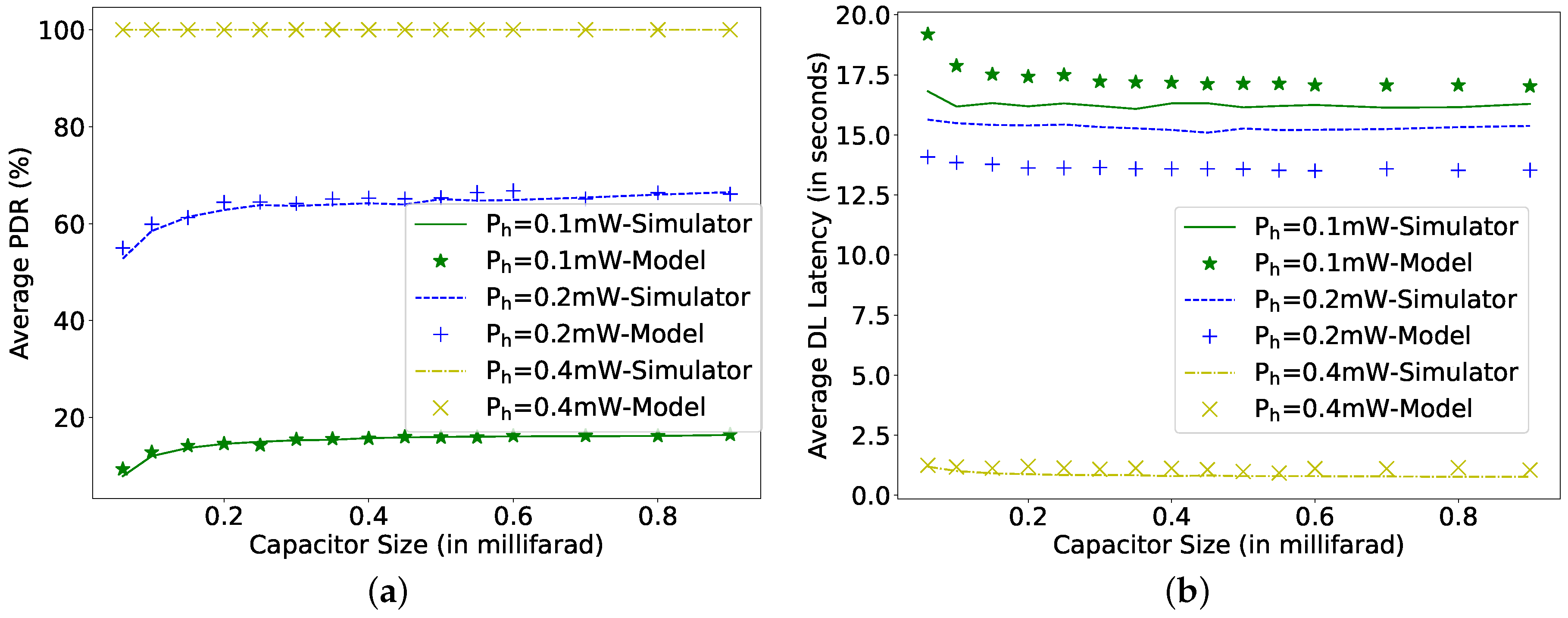
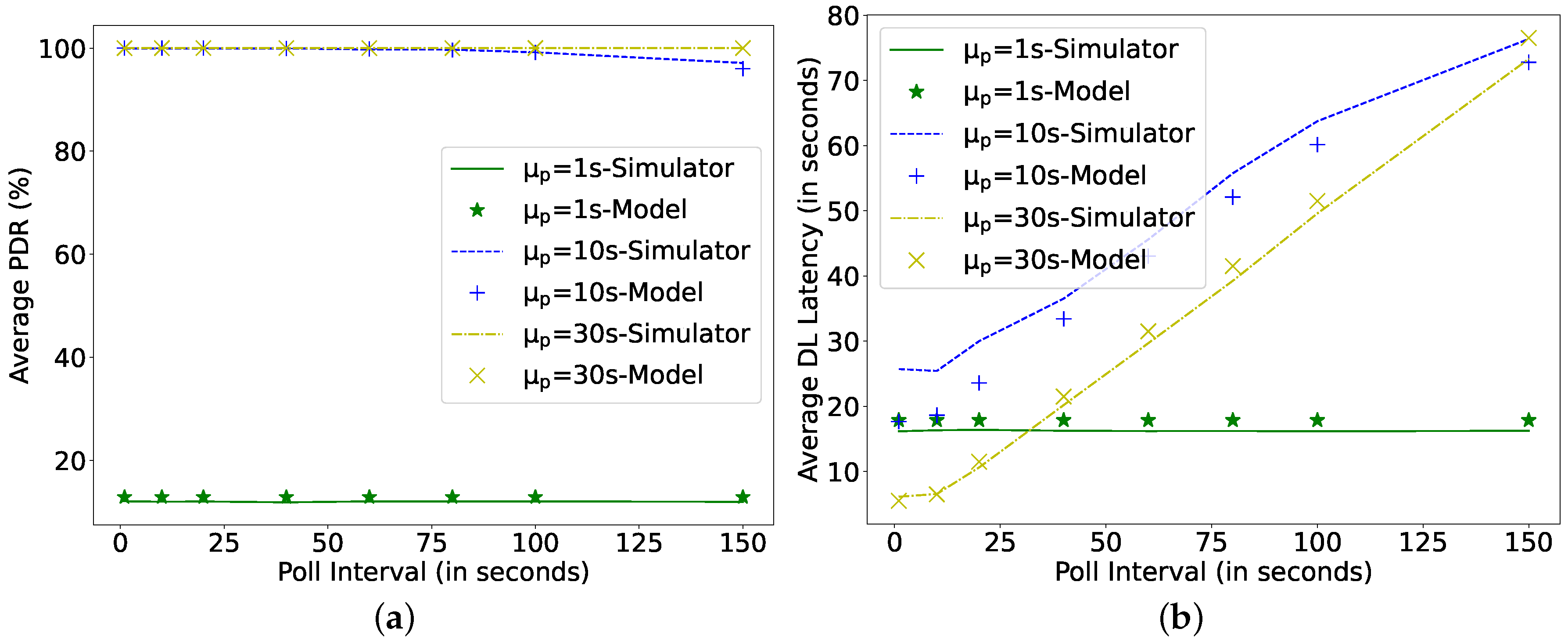
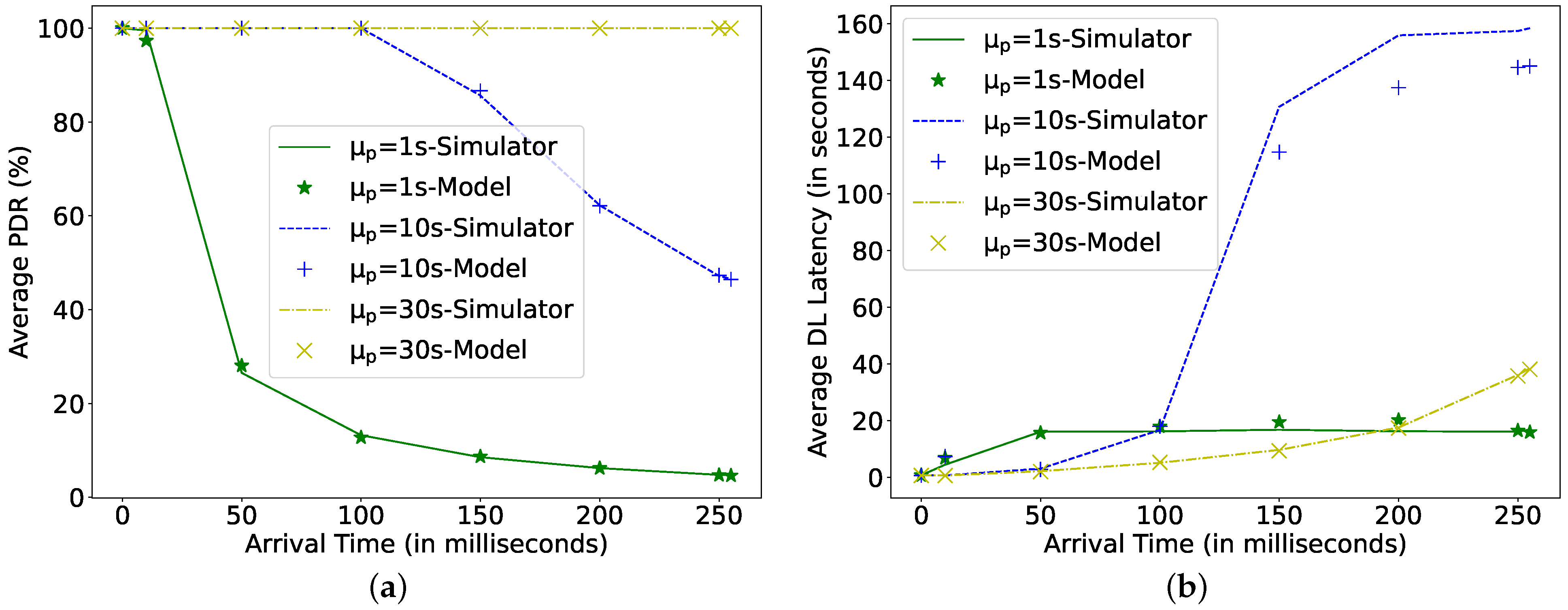
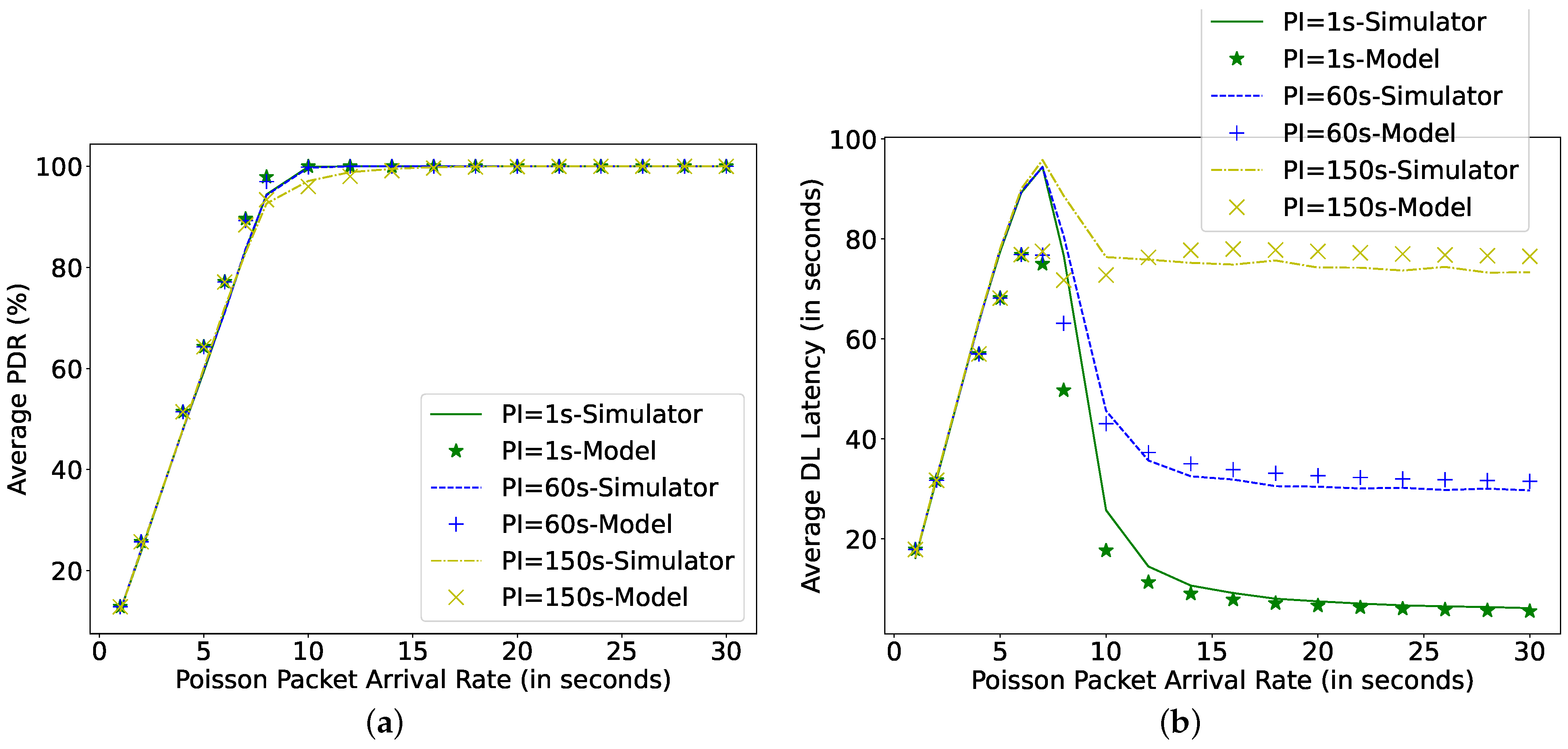
6.2. Model Validation
6.2.1. Using Simulation
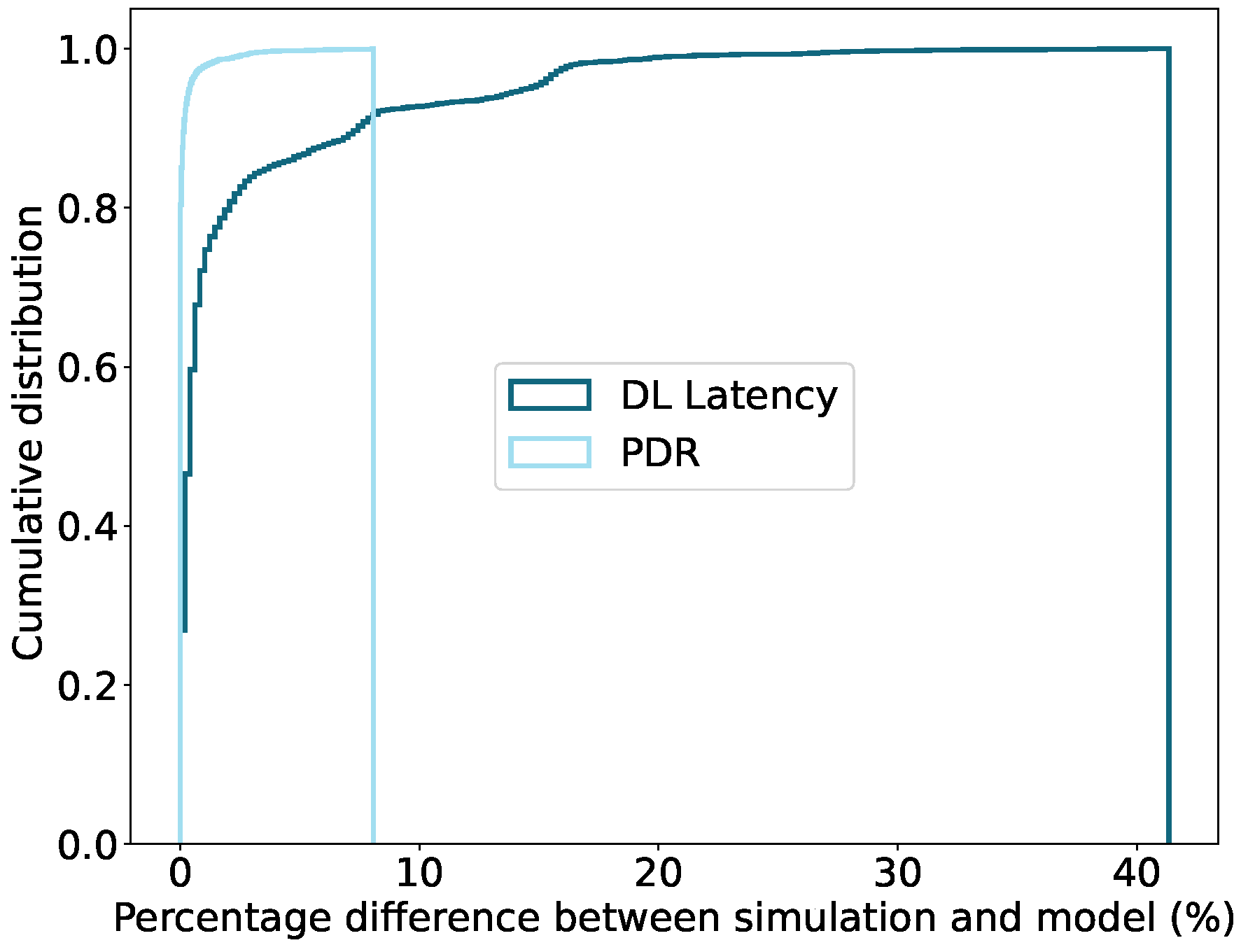
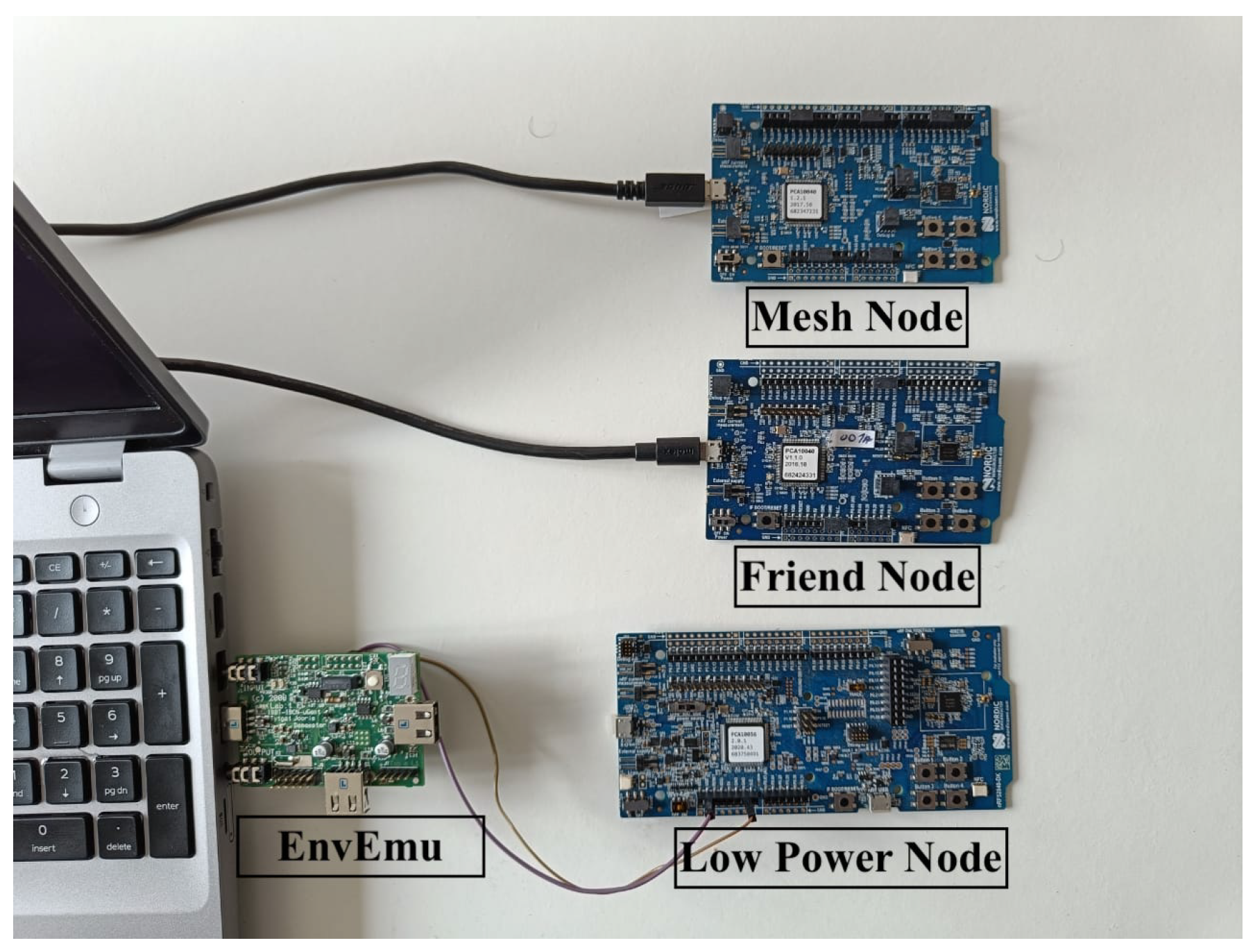
6.2.2. Using Emulator
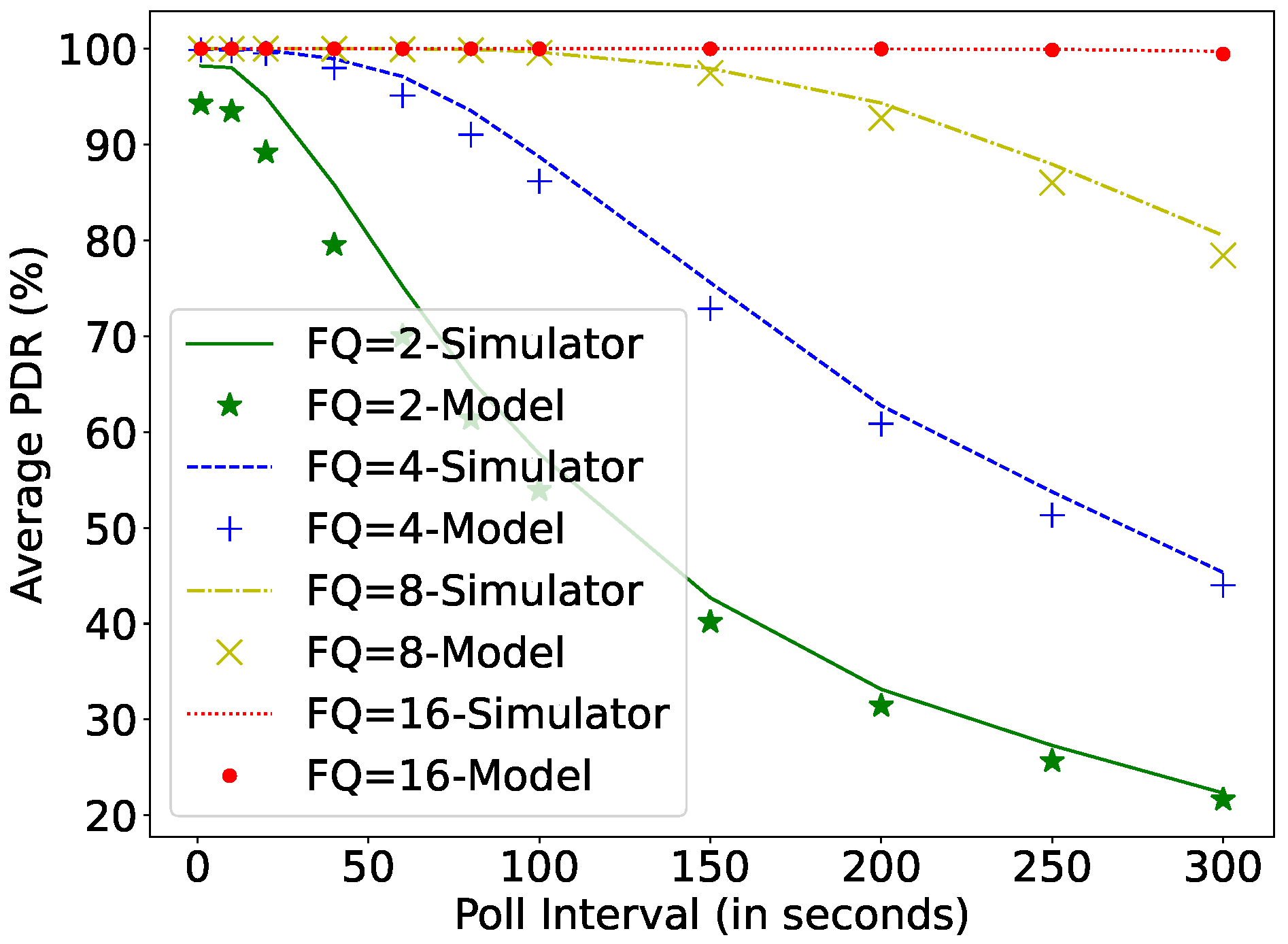
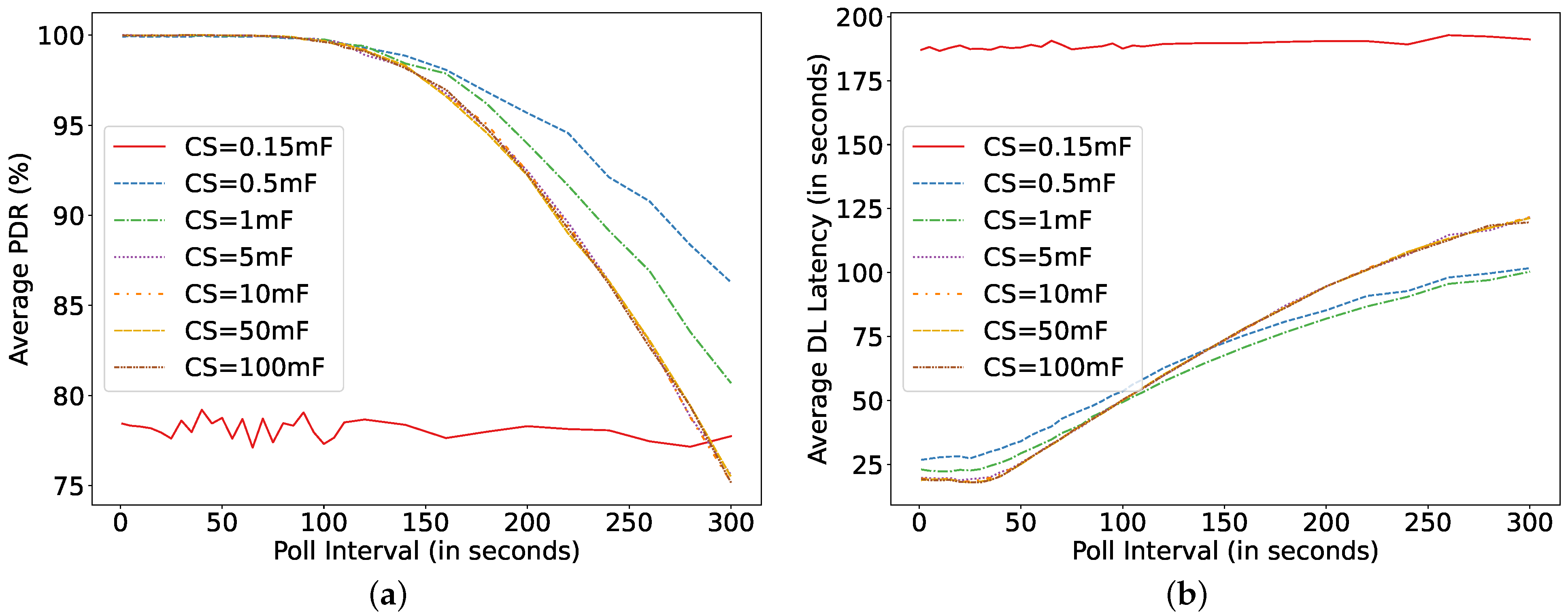
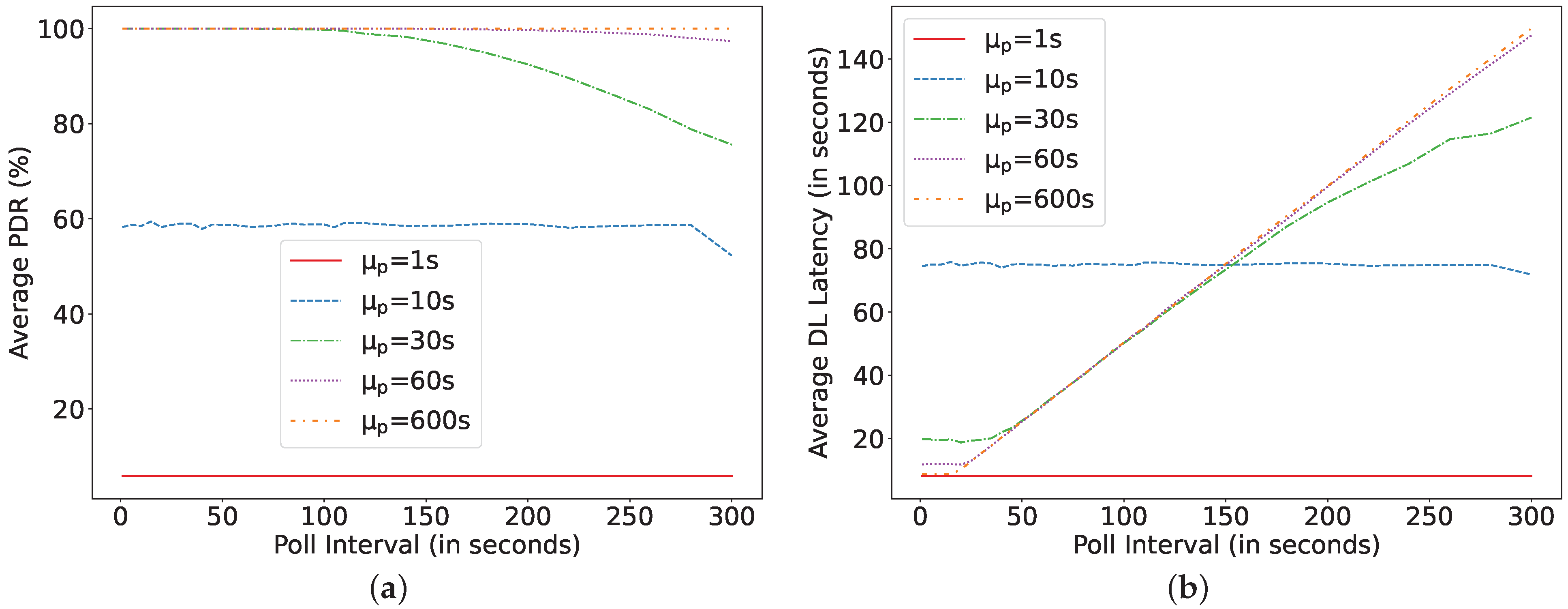
6.3. Result Analysis Based on Analytical Model and Simulation
7. Use-Case: Logistic Management
8. Conclusions
9. Discussion and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Parameters Used in the Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| Poisson data arrival rate | |
| N | FQ size |
| Voltage Vector | |
| Duration of service when = i | |
| Duration of vacation when = i | |
| Voltage at next poll instance when = i at the start of a service | |
| Voltage at next poll instance when = i at the start of a vacation | |
| Average duration of | |
| Average duration of | |
| Probability distribution vector of Markov Chain | |
| Probability distribution of the voltage equals | |
| ( | Probability distribution of the voltage equals if the queue length is |
| Transitions starting from an empty system and ending up with i packets in FQ at the next FP | |
| Transitions starting from a non-empty system and ending up with i packets in FQ at the next FP | |
| System occupancy when number of packets are present in FQ | |
| Average system occupancy in drop-tail system | |
| Average system occupancy in push-out system | |
| Probability that packets arrive at service time starting from = i | |
| Probability that packets arrive at vacation time starting from = i | |
| Probability that the packet arrives in a vacation period and packets are present in the FQ at time | |
| Probability that there are packet arrives in a vacation period and packets are present in the FQ at time and packets arrive in the remaining vacation time | |
| Probability that the packet arrives in a vacation period and packets are present in the FQ and packets arrive in the remaining vacation time | |
| Probability that the packet arrives in a service period and packets are present in the FQ at time | |
| Probability that the packet arrives in a service period and packets are present in the FQ at time and packets arrive in the remaining service time | |
| Probability that the packet arrives in a service period and packets are present in the FQ and packets arrive in the remaining service time | |
| Heaviside function for | |
| Heaviside function for | |
| Average Time between two consecutive FPs | |
| DL latency in drop-tail system | |
| DL latency in push-out system | |
| Average waiting time of a packet that arrives in a vacation period | |
| Average waiting time of a packet that arrives in a service period | |
| Mean waiting time of a future served packet in the FQ at the end of a service period that has packets ahead and packets behind it | |
| Mean waiting time of a future served packet in the FQ at the end of a vacation period that has packets ahead and packets behind it |
References
- Buchmann, I. Batteries in a Portable World: A Handbook on Rechargeable Batteries for Non-Engineers; Cadex Electronics Inc.: Richmond, BC, Canada, 2001. [Google Scholar]
- Batteries vs. Ultracapacitors? The Answer Is Both. Available online: https://batteryindustry.tech/batteries-vs-ultracapacitors-the-answer-is-both/ (accessed on 22 January 2022).
- Wang, Z.L.; Lin, L.; Chen, J.; Niu, S.; Zi, Y. Triboelectric Nanogenerators Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Enterprise Bluetooth Applications, Rigado. Available online: https://www.rigado.com/enterprise-bluetooth-applications/ (accessed on 22 January 2022).
- RC Charging Circuit, Electronics Tutorials. Available online: https://www.electronics-tutorials.ws/rc/rc_1.html (accessed on 22 January 2022).
- Mesh Profile Bluetooth Specifications. Available online: https://www.bluetooth.com/specifications/mesh-specifications/ (accessed on 22 January 2022).
- Sultania, A.K.; Delgado, C.; Famaey, J. Enabling Low-Latency Bluetooth Low Energy on Energy Harvesting Batteryless Devices Using Wake-Up Radios. Sensors 2020, 20, 5196. [Google Scholar] [CrossRef] [PubMed]
- Silva, S.; Martins, H.; Valente, A.; Soares, S. A Bluetooth Approach to Diabetes Sensing on Ambient Assisted Living systems. Procedia Comput. Sci. 2012, 14, 181–188. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; IJntema, W.; Drif, A.; Pawełczak, P.; Zuniga, M.; Yıldırım, K.S. Perpetual Bluetooth Communications for the IoT. IEEE Sens. J. 2021, 21, 829–837. [Google Scholar] [CrossRef]
- Fraternali, F.; Balaji, B.; Agarwal, Y.; Benini, L.; Gupta, R. Pible: Battery-free mote for perpetual indoor ble applications: Demo abstract. In Proceedings of the 5th Conference on Systems for Built Environments (BuildSys ’18), Shenzen, China, 7–8 November 2018; pp. 168–171. [Google Scholar]
- Nilsson, M.; Deknache, H. Investigation of Bluetooth Mesh and Long Range for IoT Wearables. Ph.D. Thesis, Malmo Universitet/Teknik och Samhälle, Malmö, Sweden, 2018. [Google Scholar]
- Álvarez, F.; Almon, L.; Hahn, A.; Hollick, M. Toxic Friends in Your Network: Breaking the Bluetooth Mesh Friendship Concept. In Proceedings of the 5th ACM Workshop on Security Standardisation Research Workshop (SSR’19), London, UK, 11 November 2019; pp. 1–12. [Google Scholar]
- Darroudi, S.; Caldera-Sànchez, R.; Gomez, C. Bluetooth Mesh Energy Consumption: A Model. Sensors 2019, 19, 1238. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Álvarez, F.; Almon, L.; Radtki, H.; Hollick, M. Bluemergency: Mediating Post-disaster Communication Systems using the Internet of Things and Bluetooth Mesh. In Proceedings of the 9th IEEE Global Humanitarian Technology Conference, Seattle, WA, USA, 17–20 October 2019. [Google Scholar]
- Designing with Bluetooth Mesh: Nodes and Feature Types. Available online: https://www.embedded.com/designing-with-bluetooth-mesh-nodes-and-feature-types/ (accessed on 22 January 2022).
- Hortelano, D.; Olivares, T.; Carmen Ruiz, M. Reducing the energy consumption of the friendship mechanism in Bluetooth mesh. Comput. Netw. 2021, 195, 108172. [Google Scholar] [CrossRef]
- Aijaz, A. Infrastructure-less Wireless Connectivity for Mobile Robotic Systems in Logistics: Why Bluetooth Mesh Networking is Important? arXiv 2021, arXiv:2107.05563. [Google Scholar]
- Delgado, C.; Sanz, J.M.; Famaey, J. On the Feasibility of Batteryless LoRaWAN Communications using Energy Harvesting. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Gawhare, S.B.; Gaikwad, A. Area and Power efficient High Speed Voltage Comparator. In Proceedings of the International Conference on Automatic Control and Dynamic Optimization Techniques, Pune, India, 9–10 September 2016; pp. 198–201. [Google Scholar]
- Blondia, C. A queueing model for a wireless sensor node using energy harvesting. Telecommun. Syst. 2021, 77, 335–349. [Google Scholar] [CrossRef]
- Stochastic, Karl Sigman. Available online: http://www.columbia.edu/~ks20/stochastic-I/stochastic-I-LL.pdf (accessed on 4 January 2022).
- nRF52840 DK, Nordic Semiconductor. Available online: https://www.nordicsemi.com/Software-and-tools/Development-Kits/nRF52840-DK (accessed on 22 January 2022).
- Power Profiler Kit II, Nordic Semiconductor. Available online: https://www.nordicsemi.com/Software-and-tools/Development-Tools/Power-Profiler-Kit-2 (accessed on 22 January 2022).
- User Guide Evaluation Board for AEM10941, Epeas. Available online: https://e-peas.com/wp-content/uploads/2020/06/epeas_Solar_Energy_Harvesting_User_Guide_AEM10941.pdf (accessed on 22 January 2022).
- w-iLab.1 Hardware. Available online: https://doc.ilabt.imec.be/ilabt/wilab/hardware.html (accessed on 4 March 2022).
- Using the Sensor Nodes. Available online: https://doc.ilabt.imec.be/ilabt/wilab/tutorials/sensor.html (accessed on 21 March 2022).
- Dekimpe, R.; Xu, P.; Schramme, M.; Gerard, P.; Flandre, D.; Bol, D. A batteryless ble smart sensor for room occupancy tracking supplied by 2.45 ghz wireless power transfer. Integration 2019, 67, 8–18. [Google Scholar] [CrossRef]
- Gleonec, P.; Ardouin, J.; Gautier, M.; Berder, O. Poster: Multi-source Energy Harvesting for IoT nodes. In Proceedings of the Conference on Design and Architectures for Signal and Image Processing (DASIP), Rennes, France, 12–14 October 2016. [Google Scholar]
- Ahn, J.I.; Kim, D.; Ha, R.; Cha, H. State-of-Charge Estimation of Supercapacitors in Transiently-powered Sensor Nodes. IEEE Trans. Comput. -Aided Des. Integr. Circuits Syst. 2021, 41, 225–237. [Google Scholar] [CrossRef]
- Gleonec, P.; Ardouin, J.; Gautier, M.; Berder, O. Architecture exploration of multi-source energy harvester for IoT nodes. In Proceedings of the IEEE Online Conference on Green Communications (OnlineGreenComm), Piscataway, NJ, USA, 14 November–17 December 2016; pp. 27–32. [Google Scholar]
- Naresh, B.; Singh, V.K.; Sharma, V.K. Flexible Hybrid Energy Harvesting System to Power Wearable Electronics. In Proceedings of the Fourth International Conference on Advances in Electrical, Electronics, Information, Communication and Bio-Informatics (AEEICB), Chennai, India, 27–28 February 2018; pp. 1–5. [Google Scholar]
- Hester, J.; Tobias, N.; Rahmati, A.; Sitanayah, L.; Holcomb, D.; Fu, K.; Burleson, W.P.; Sorber, J. Persistent Clocks for Batteryless Sensing Devices. ACM Trans. Embed. Comput. Syst. 2016, 15, 4. [Google Scholar] [CrossRef]
- Anagnostou, P.; Gomez, A.; Hager, P.A.; Fatemi, H.; Gyvez, J.P.; Thiele, L.; Benini, L. Torpor: A Power-Aware HW Scheduler for Energy Harvesting IoT SoCs. In Proceedings of the 28th International Symposium on Power and Timing Modeling, Optimization and Simulation (PATMOS), Platja d’Aro, Spain, 2–4 July 2018; pp. 54–61. [Google Scholar]
- Elahi, H.; Munir, K.; Eugeni, M.; Atek, S.; Gaudenzi, P. Energy Harvesting towards Self-Powered IoT Devices. Energies 2020, 13, 5528. [Google Scholar] [CrossRef]
- Lee, H.G.; Chang, N. Powering the IoT: Storage-less and converter-less energy harvesting. In Proceedings of the 20th Asia and South Pacific Design Automation Conference, Chiba, Japan, 19–22 January 2015; pp. 124–129. [Google Scholar]
- Zhou, H.; Jiang, T.; Gong, C.; Zhou, Y. Optimal Estimation in Wireless Sensor Networks With Energy Harvesting. IEEE Trans. Veh. Technol. 2016, 65, 9386–9396. [Google Scholar] [CrossRef]
- Patil, K.; Fiems, D. The value of information in energy harvesting sensor networks. Oper. Res. Lett. 2018, 46, 362–366. [Google Scholar] [CrossRef] [Green Version]
- Kumar, A.; Saad, W. On the tradeoff between energy harvesting and caching in wireless networks. In Proceedings of the IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; pp. 1976–1981. [Google Scholar]
- Cho, K.; Park, W.; Hong, M.; Park, G.; Cho, W.; Seo, J.; Han, K. Analysis of Latency Performance of Bluetooth Low Energy (BLE) Networks. Sensors 2014, 15, 59–78. [Google Scholar] [CrossRef] [PubMed]
- Treurniet, J.J.; Sarkar, C.; Prasad, R.V.; De Boer, W. Energy Consumption and Latency in BLE Devices under Mutual Interference: An Experimental Study. In Proceedings of the 3rd International Conference on Future Internet of Things and Cloud, Rome, Italy, 24–26 August 2015; pp. 333–340. [Google Scholar]
















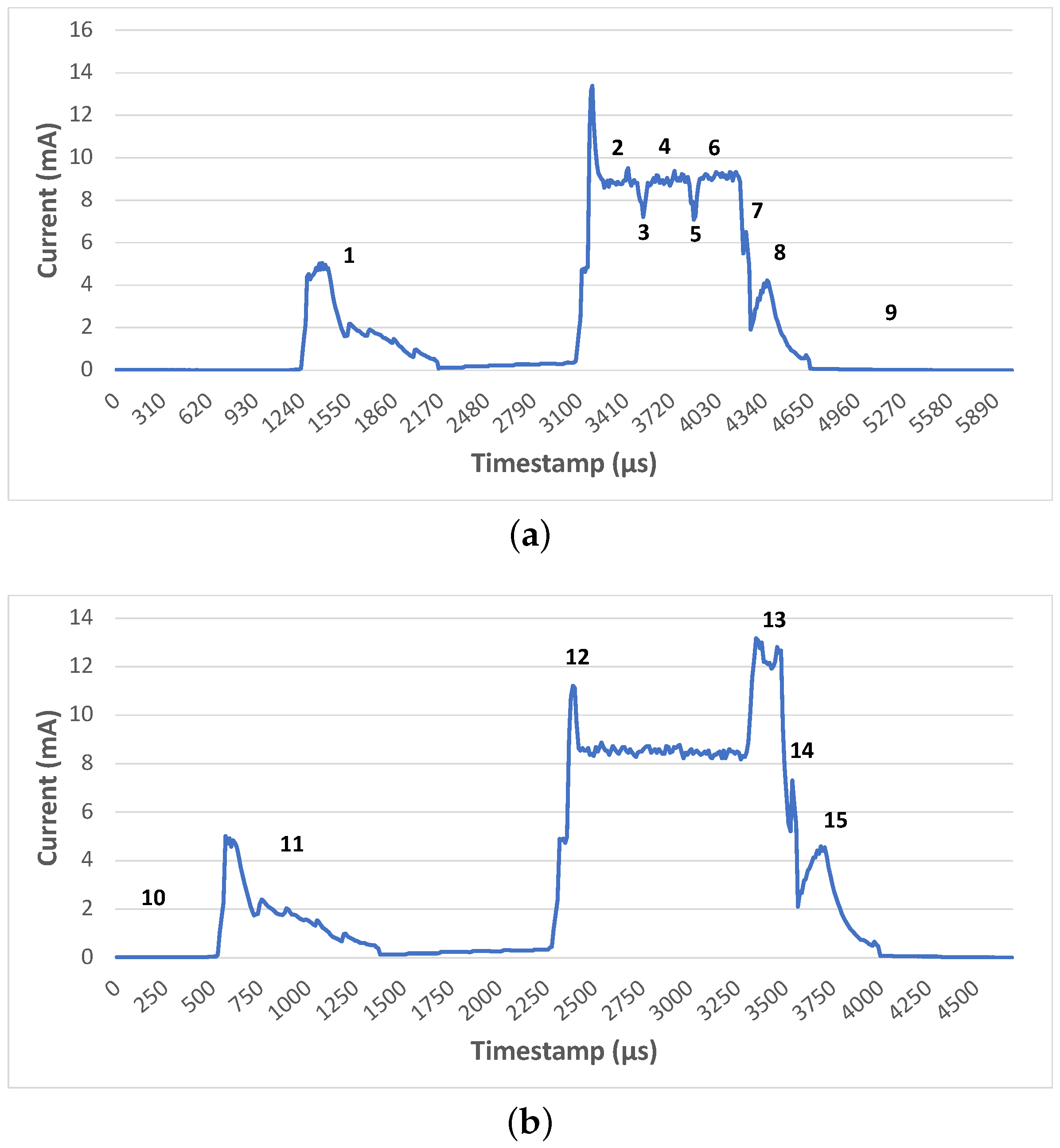
| Identifier | Radio State | Time [μs] of the LPN [mA] | Current Cons. | Comments |
|---|---|---|---|---|
| 1 | Radio wake-up | 2940 | 0.587 | Prepare for poll transmission |
| 2 | TX (at 4 dBm) | 471 | 9.09 | Tx advertisement packet on channel 37 |
| 3 | Change channel | 29 | 7.78 | Change radio frequency |
| 4 | TX (at 4 dBm) | 380 | 9.15 | Tx advertisement packet on channel 38 |
| 5 | Change channel | 29 | 7.57 | Change again the radio frequency |
| 6 | TX (at 4 dBm) | 384 | 9.16 | Tx advertisement packet on channel 39 |
| 7 | Radio off | 34 | 6.60 | Main radio in OFF state |
| 8 | Post processing | 420 | 2.17 | |
| 9 | Cool down | 20,820 | 0.00653 | Prepare to switch to the SLEEP state |
| 10 | Sleep | RD | 0.00896 | Node in SLEEP mode |
| 11 | Wake-up prescan | 1910 | 1.13 | Wake-up for Rx |
| 12 | Listen | AT | 8.68 | Actively Listen for incoming DL packet |
| 13 | Scan message | 1160 (or 900) | 9.64 | Rx 24 B FQ data (or 22 B FU) |
| 14 | Radio off | 389 | 4.69 | Main radio in OFF state |
| 15 | Post-processing and Cool down | 23,410 | 0.00619 | Set up the sleep timer for the next state and switch to SLEEP state |
| Parameters | Symbol | Values/Range |
|---|---|---|
| Poisson packet arrival rate | [1, 10, 30, 60, 120] s | |
| Harvesting power | [0.1, 0.15, 0.25, 0.3, 0.35, 0.2, 0.4, 0.6, 0.8, 1] mW | |
| Capacitor size | C | [0.1, 0.2, 0.3, 0.4, 0.5, 1] mF |
| Poll interval | [1, 10, 20, 40, 60, 80, 100, 150, 200, 250, 300, 400, 500, 600, 800, 1000] s | |
| Turn-off voltage | 2.8 V | |
| Max operating voltage | 4.5 V | |
| Friend Queue size | N | [8, 16] packets |
| Receive Delay | 255 ms | |
| Arrival time (max up to ) | 0 ms | |
| Tx power level | 0 dBm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sultania, A.K.; Delgado, C.; Blondia, C.; Famaey, J. Downlink Performance Modeling and Evaluation of Batteryless Low Power BLE Node. Sensors 2022, 22, 2841. https://doi.org/10.3390/s22082841
Sultania AK, Delgado C, Blondia C, Famaey J. Downlink Performance Modeling and Evaluation of Batteryless Low Power BLE Node. Sensors. 2022; 22(8):2841. https://doi.org/10.3390/s22082841
Chicago/Turabian StyleSultania, Ashish Kumar, Carmen Delgado, Chris Blondia, and Jeroen Famaey. 2022. "Downlink Performance Modeling and Evaluation of Batteryless Low Power BLE Node" Sensors 22, no. 8: 2841. https://doi.org/10.3390/s22082841