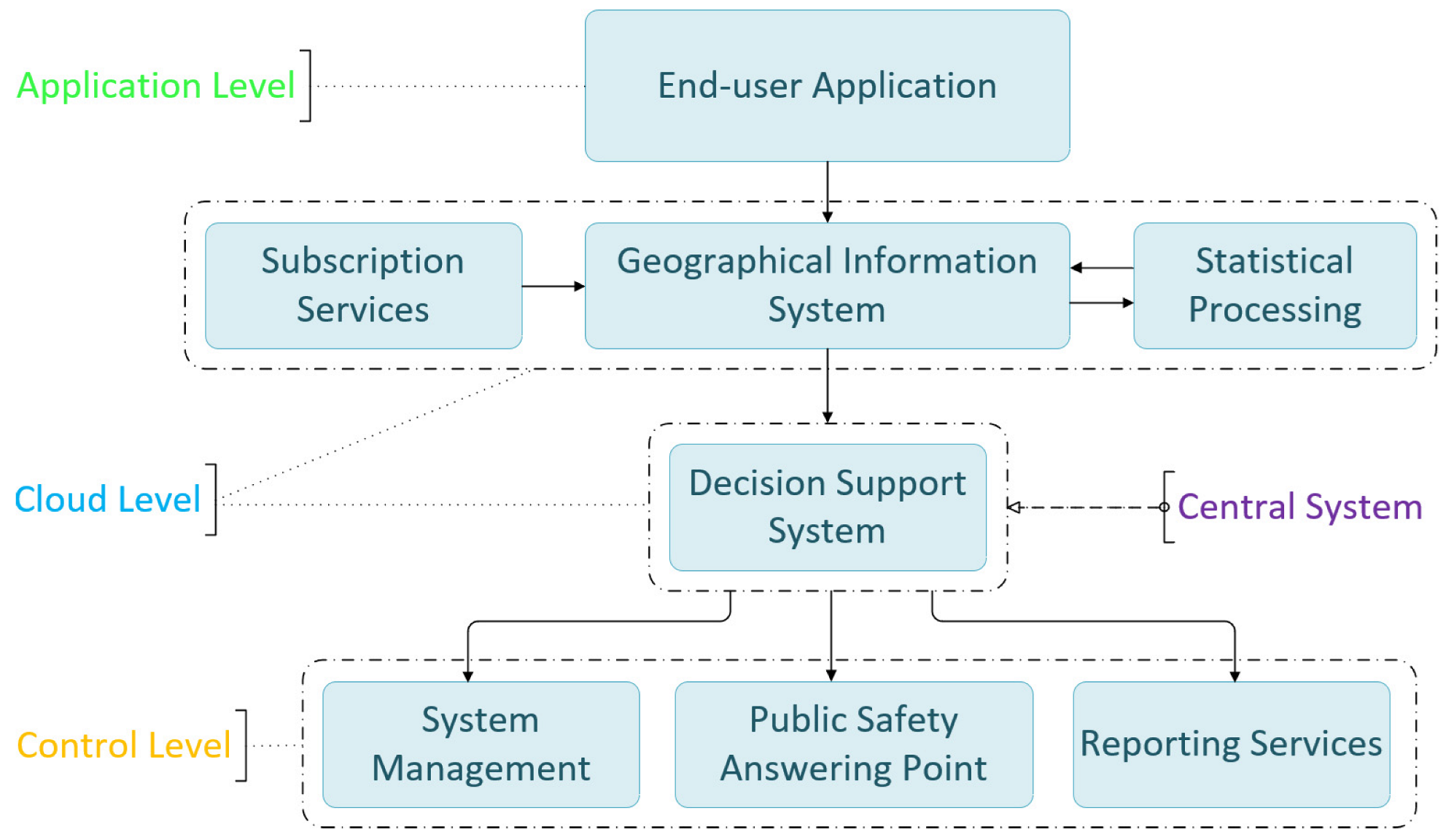
The interlinked levels consist of the following interconnected subsystems: The end user application installed on mobile devices regularly sends predefined content messages and emergency messages when special conditions are met; the Geographical Information System, which stores dynamic data coming from mobile devices and subscription services, as well as static data. It cooperates in tandem with the statistical processing subsystem; the central information processing system, which hosts the decision support system; the system management and the reporting services subsystems. The public safety answering point is not part of the interconnected systems, per se, but rather a significant contributor to the safety operations, since it is the crucial establishment that mobilizes medical assistance services in case of an emergency. Data from smartphone sensors, geolocation, driver notifications, and third-party information are transmitted and received via the 3G/4G/5G cellular network. The process is transparent on the air interface. The mobile device uses the 3G/4G/5G communication protocol, depending on compatibility and local availability. The mobile application is light on resources and keeps battery levels normal during operation.
4.1. Application Level
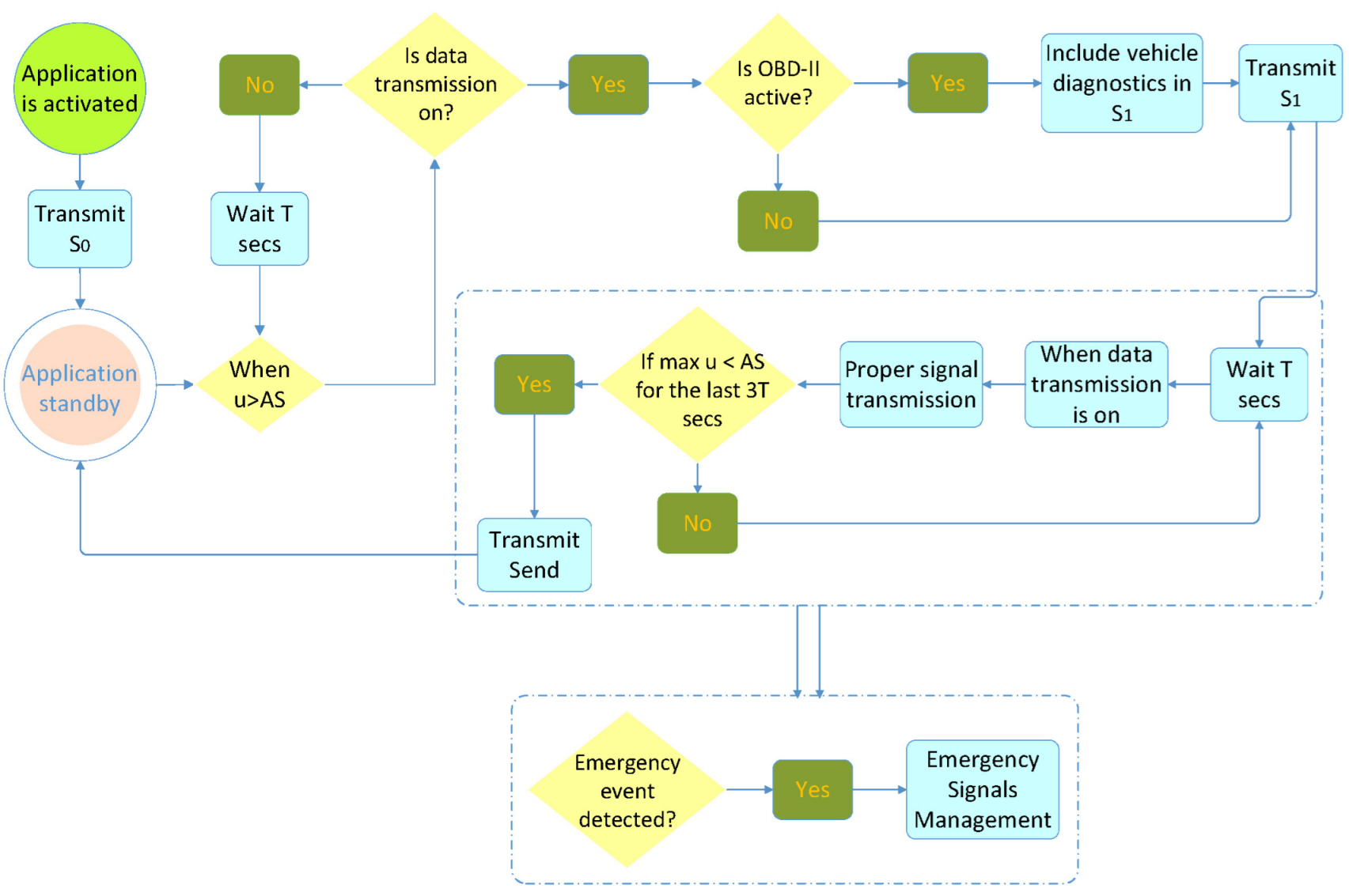
When the application is activated, it sends the
signal, alerting the system that it is currently in standby mode. The process is described in
Figure 3.
After transmission, when the speed of the MD exceeds AS, the OBD-II interface is pinged. If it is active, , with which the application is placed into operating mode, is transmitted, including diagnostics from the OBD-II interface, and a new session begins. If the signal cannot be sent (lack of data transmission), it awaits T s and rechecks the maximum speed of the mobile device for the last T s. If, during this time, the maximum speed of the mobile device exceeds AS, then it sends with updated data. If the signal cannot be sent again, the same procedure is repeated every T s.
After sending
, the application is programmed to send each signal with a time deviation of
T s from the previous signal. When
cannot be sent (e.g., because of lack of mobile network coverage), the signal is sent as soon as it becomes possible. When the application operates, it transmits a data packet every
T s. If, after
, the mobile device is in an area where there is no network coverage, no signal can be transmitted. In this case, the application withholds the data packet, which was next in line for transmission, updates it, and transmits the signal
immediately after the mobile device enters an area with mobile network coverage. In this case, (
) is greater than
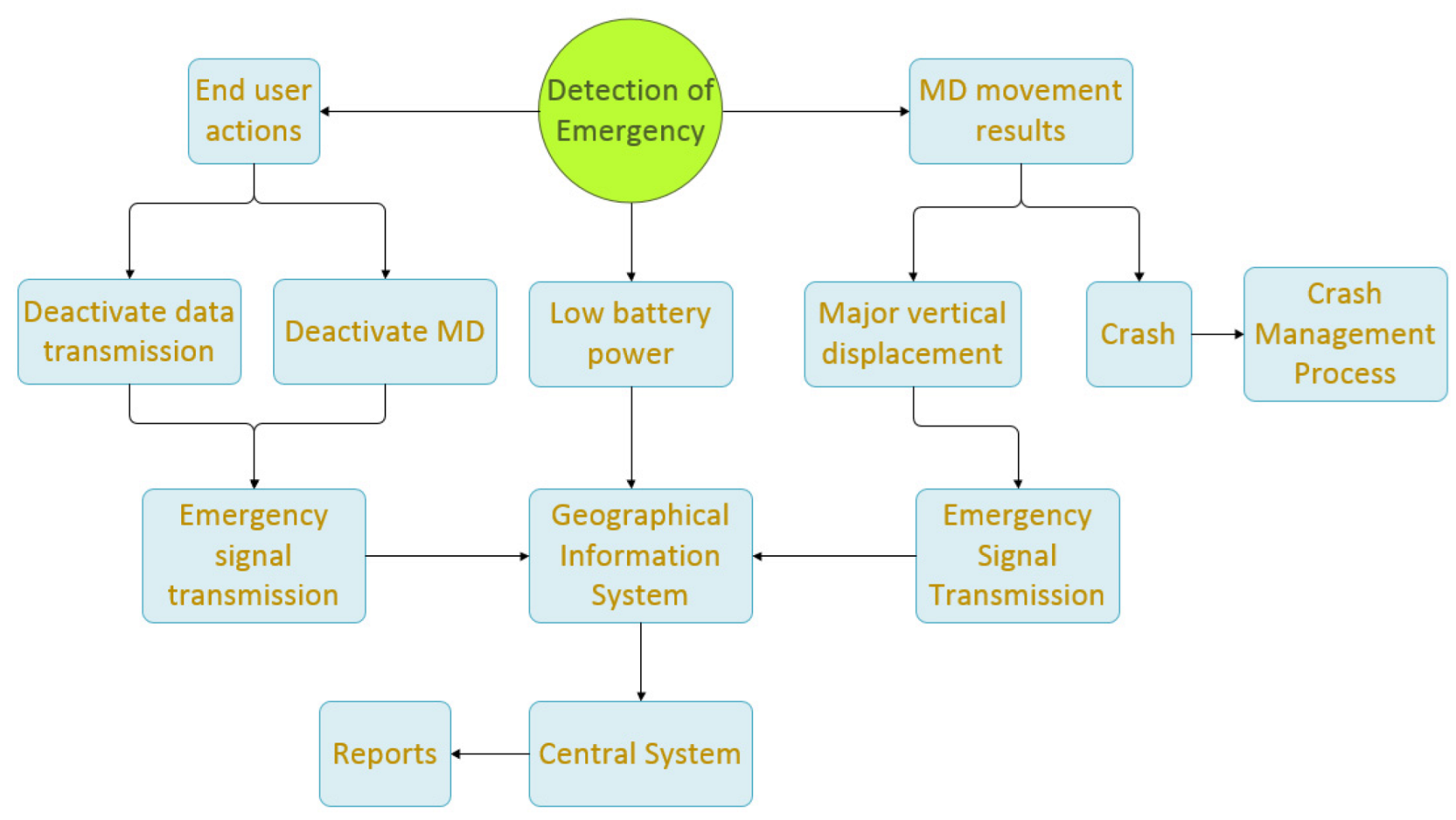
T s. During operation, the application is in constant alert to detect emergencies (explained in
Figure 4) that are either due to battery power falling below a predetermined threshold on the mobile device or to end user actions (device switch-off, data transmission deactivation), or, in extreme conditions, resulting from a possible crash or a large vertical displacement.
In these cases, the following actions are taken:
If the application detects a battery power level of the mobile device below a predetermined threshold, then it immediately sends an signal. If the signal cannot be sent, it tries again at intervals. The mobile device sends a proper signal to the DSS.
If the application detects end user action to disable the data transmission, it immediately alerts the DSS by sending before the process is completed. Then, the application enters standby mode.
If the application detects the end user turning their device off, it immediately alerts the DSS by sending before the process is completed. Then, the application enters standby mode.
If the application detects a sudden major decrease in the speed of the mobile device (such as in the event of a crash), it immediately transmits to the DSS. Then, the application continuously sends to the central system the position and the speed of the mobile device for a period of . After the end of that period, signals are sent every for a period of , unless the central system sends a different notification. During the period, the application does not enter standby mode. The central system supplies when communication with the application is available. In case of communication inability with the central system, is set to be 15 s.
If the application detects a sudden major vertical displacement exceeding a predetermined threshold, it immediately sends to the DSS. If it cannot send the signal, it does so as soon as it finds an active data transmission. The signal also conveys the coordinates of the point at which the event occurred. , along with regular signals from the same region, periodically (e.g., once a week) undergo statistical analysis from statistical processing, producing results regarding the road network surface quality, forming a separate GIS layer.
If, during the period which starts at and ends at , the maximum values of the accelerometer and/or the gyroscope exceed predetermined thresholds, then includes these values in its data payload. These data also undergo statistical analysis, producing results pertinent to the road network surface quality. If the application is operating and the speed of the mobile device falls below AS for more than s, then the application enters standby mode and immediately transmits the signal, indicating termination of the current session. The application supports interfacing with the OBD-II protocol to collect vehicle telemetry and provide real-time data on vehicle subsystems’ functionality (tire pressure, temperatures, hydraulics, electrical systems, etc.). The application has the ability to send notifications at the user’s request directly to a PSAP concerning medical need, safety issues, and fire risks. It also provides the ability to alert the appropriate call center for car problems. The application displays to the end user useful, personalized information coming from the system.
4.2. Cloud Level
At this level, subscription services are third party providers (weather data, etc.), whereas the DSS shapes the central system.
4.2.1. Geographical Information System
GIS is the central database of the system that contains three data categories, obtained from subscription services or aggregated from end users:
Static data, including the design of the road network, road topology, etc.
Dynamic data, such as cellular network coverage, meteorological data, etc.
Incoming data from the mobile device.
All the above data have a common feature: they contain geographical information, which links these heterogeneous data together.
4.2.2. Statistical Processing System
Statistical results are extracted from the statistical processing system:
From gyroscope recordings and mapping of dangerous road points (e.g., potholes, road pits): If a statistically significant probability shows large fluctuations with respect to the vertical axis, the central system registers a relevant GIS record for that session of the road network.
From potential bottlenecks that may be encountered in the vehicle’s traveling direction during the next few minutes: If a statistically significant probability shows on different sections of the road different mobile devices that run with less than the AS, the central system registers to the GIS an indication of a possible congestion.
From the creation of a model that associates the average speed of traffic in a section of the road network with visibility and weather conditions.
From the creation of maps per mobile operator that reflect the poor signal and blank spots related to the network coverage: By statistical analysis of the signals not sent to the cloud, we can delineate the areas where cellular coverage is spotty or absent altogether.
4.2.3. Decision Support System
The subsystem includes decision support and multi-criteria decision-making algorithms. The subsystem issues decisions on issues such as:
Predicting the potential of accident involvement, accounting for the current MD movement behavior and the road section hazard risk the user will reach soon. The exported individualized result, under certain conditions, leads to the creation of an appropriate report that can be forwarded to the user to prevent an accident.
The proposed maximum driving speed in a section of a roadway based on current conditions (meteorological phenomena, road condition, time and daylight, road network topology risk, etc.).
Visualization of end user profiles by combining historical and current data.
Notification of potentially dangerous situations encountered by the end user shortly on their route with regard to current traffic behavior, such as:
- (a)
Traffic jams—immobilized cars they will soon encounter and are likely to create hazards on the road.
- (b)
Crashes they will encounter in their direction.
- (c)
Dangerous road ahead, which is characterized by a combination of factors (road topology, MD movement behavior, meteorological phenomena).
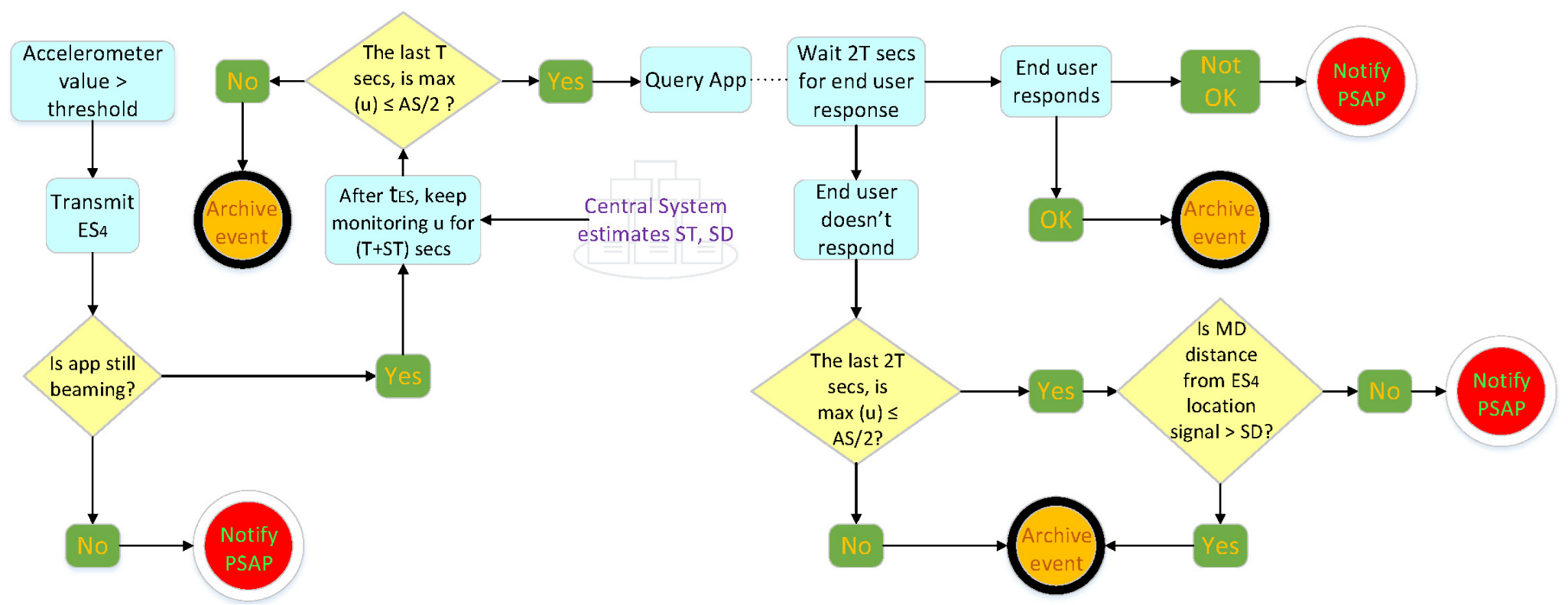
The central system, upon receiving
, initiates a crash management process (
Figure 5), where it dynamically calculates parameters
&
and sends
to the application.
This step supports two different cases:
- (a)
If, for () s and after transmission, the central system will not receive anything from the application, it alerts the PSAP.
- (b)
If, for () s and after transmission, the central system receives signals from the application and detects motion of the mobile device from () until (), the speed of which is larger than , then the emergency is archived. In case no movement of the MD greater than is detected during this particular time segment, the central system queries the application and expects an answer for s. If an answer is indeed received, the system archives the event or alerts the PSAP, depending on the end user’s feedback. If no answer is received during this particular time segment, the system monitors the MD’s maximum speed during this time segment and any displacement from the location was last transmitted. If MD’s moving speed was still less than and the displacement less than SD, the system alerts the PSAP. This way, notifications after transmission and before PSAP alert are filtered on three different levels: the MD moving speed, the MD displacement, and the end user application confirmation (three-way accident verification).
If, after time (), for a period of , reasons for cancellation of are in effect (retaining , MD displacement from the location was last transmitted greater than SD or end user response to the special query that they are OK), the central system sends PSAP a new signal canceling the alert.
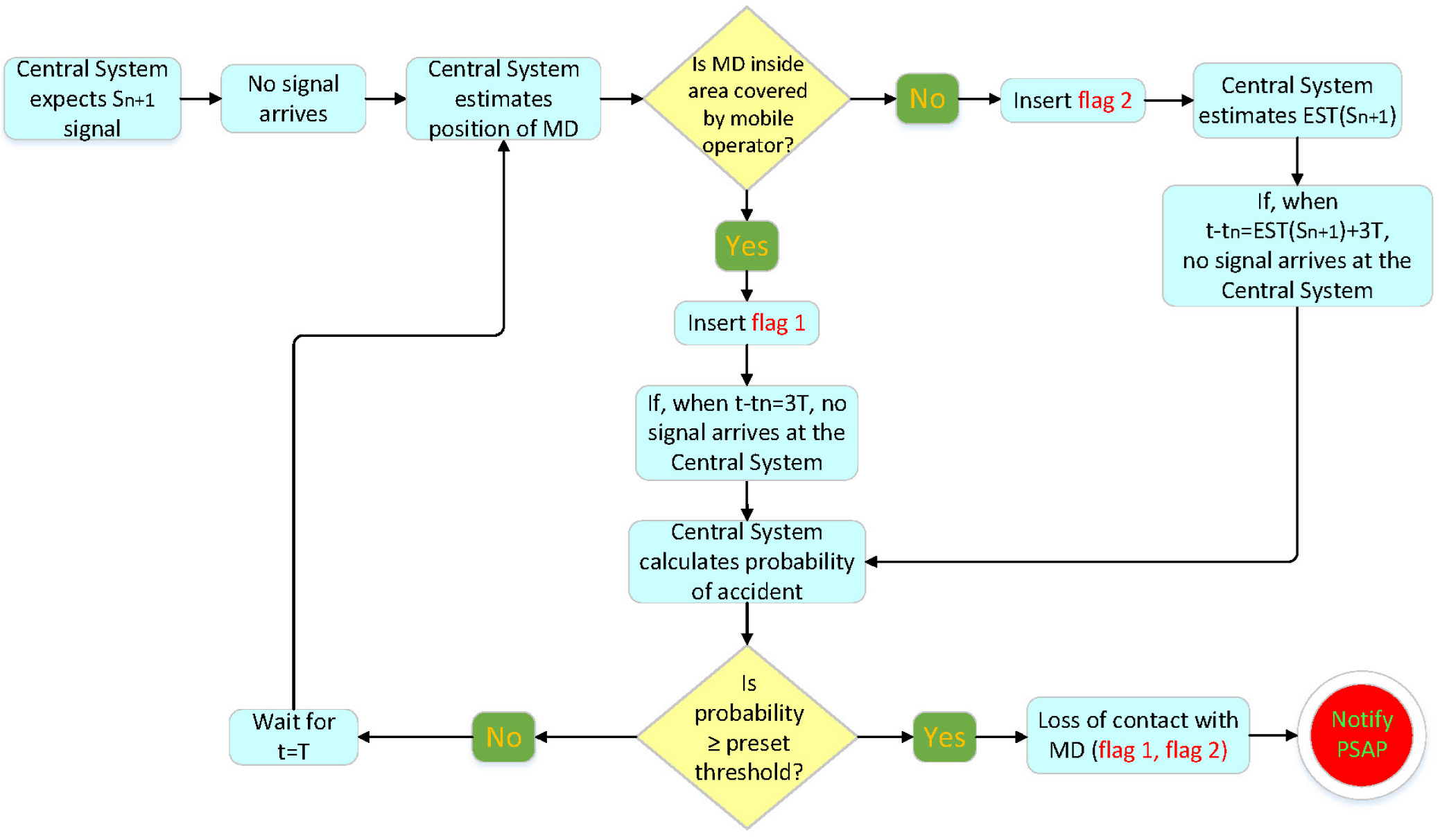
In the event of communication failure with the mobile device, the DSS assesses relevant factors and decides to update the PSAP for a possible accident in the area. This is achieved by estimating the expected time the mobile device will take to send the next signal. This calculation shall be made taking into account the following:
- (a)
The mobile network coverage map.
- (b)
Since the mobile device has entered an area not covered by a cellular network, by calculating the expected time at which the device will exit from that area, based on driving behavior, the degree of road network topology risk, the meteorological data of the area, the distance to travel.
In case of a significant delay when sending a signal in relation to the expected time of sending that signal, the decision support system considers all the factors and makes the decision on whether to update the PSAP or not.
The decision support system also includes:
An expert system, XS1, of hazard assessment of the road the end user is currently on that time. To calculate the degree of risk (dynamic estimation), all parameters mentioned in the GIS are taken into account. XS1 dynamically calculates the road risk from GIS data provided by third parties. These include traffic bottlenecks, road accidents in the direction of mobility, the general condition of the road network, road works, objects on the road (roadkill, landslides, boulders), and extreme weather phenomena. When an assessment of these conditions surpasses a particular safety threshold, drivers receive notifications and warnings towards speed reduction with justified explanation.
An expert system, XS2, which, acknowledging information from XS1, estimates the maximum safe speed for that road segment. XS2 monitors speed, GPS coordinates, and localized weather conditions. It also derives the road type, visibility, and brightness of day. Combining these data with XS1 and national standards for maximum safe driving speeds, XS2 produces a dynamic assessment of a real-time safe speed and notifies the driver about it.
An expert system, XS3, from which the current MD movement behavior profile is derived, acknowledging information from XS2, the vehicle speed, and the maximum accelerometer values. XS3 exploits mobile device sensors to create a driving profile, based on the driver’s mobility behavior. Taking into account information from XS2, the system monitors speed and accelerometer spikes, angular velocity, braking and turning behavior, frequent acceleration and deceleration, overtaking, and smoothness in order to classify driving behavior according to specific types.
An expert system, XS4, from which the likelihood of an accident involving a mobile device is derived. XS4 evaluates the likelihood of a vehicle becoming involved in an accident. It does so as a result of real-time processing from all parameters stored in GIS, the valuable contribution of expert systems XS1–XS3, and historical data for road accidents from national and international repositories. XS4 then acts on the output of information processing, alerting the driver for an imminent danger that might develop into an accident. XS4 plays a critical role in initiating the communication protocol with EMS when the likelihood of an accident breaches a safety threshold.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}