
Development of a 3D Relative Motion Method for Human–Robot Interaction Assessment

 , , , ,
, , , ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
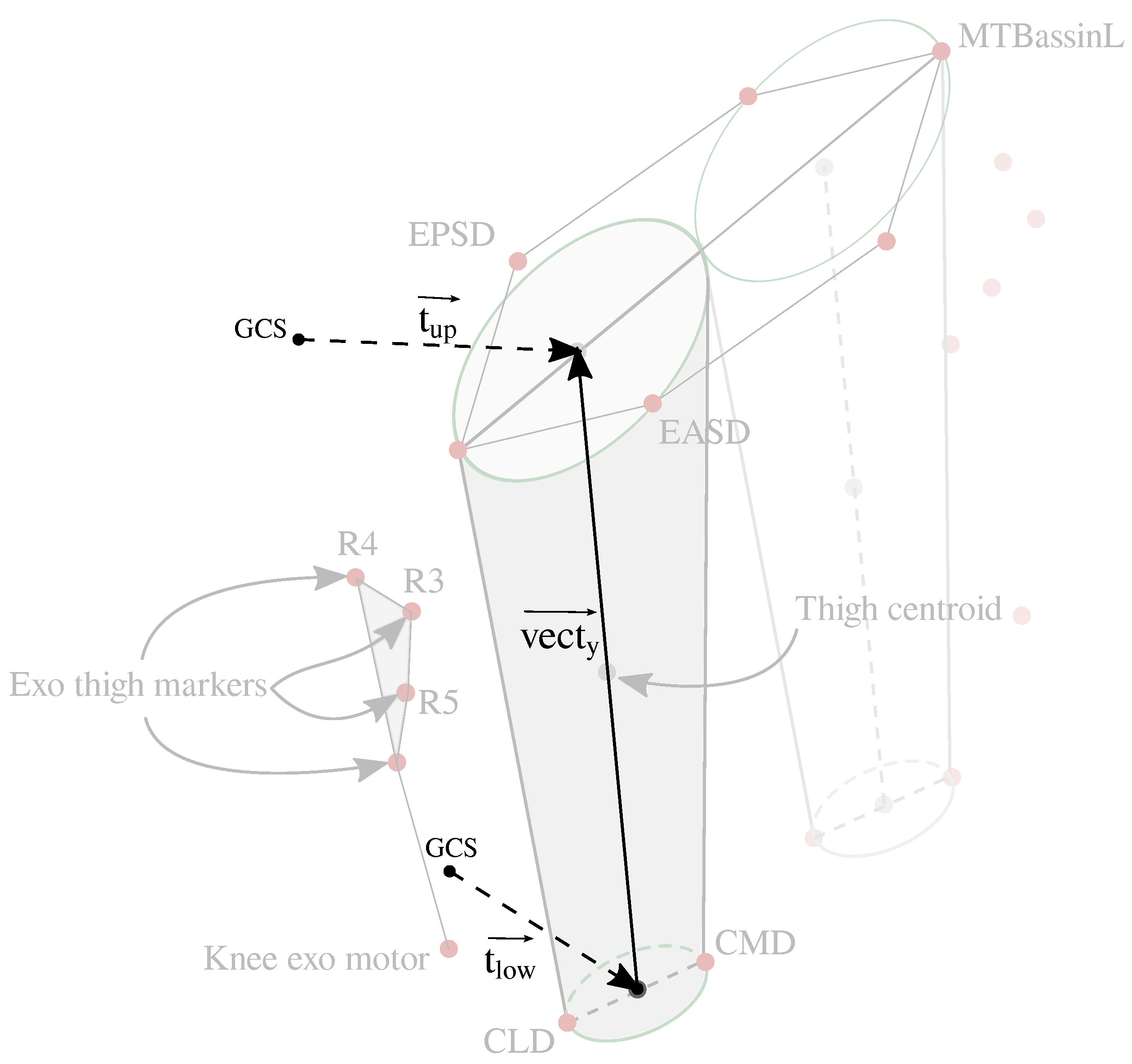
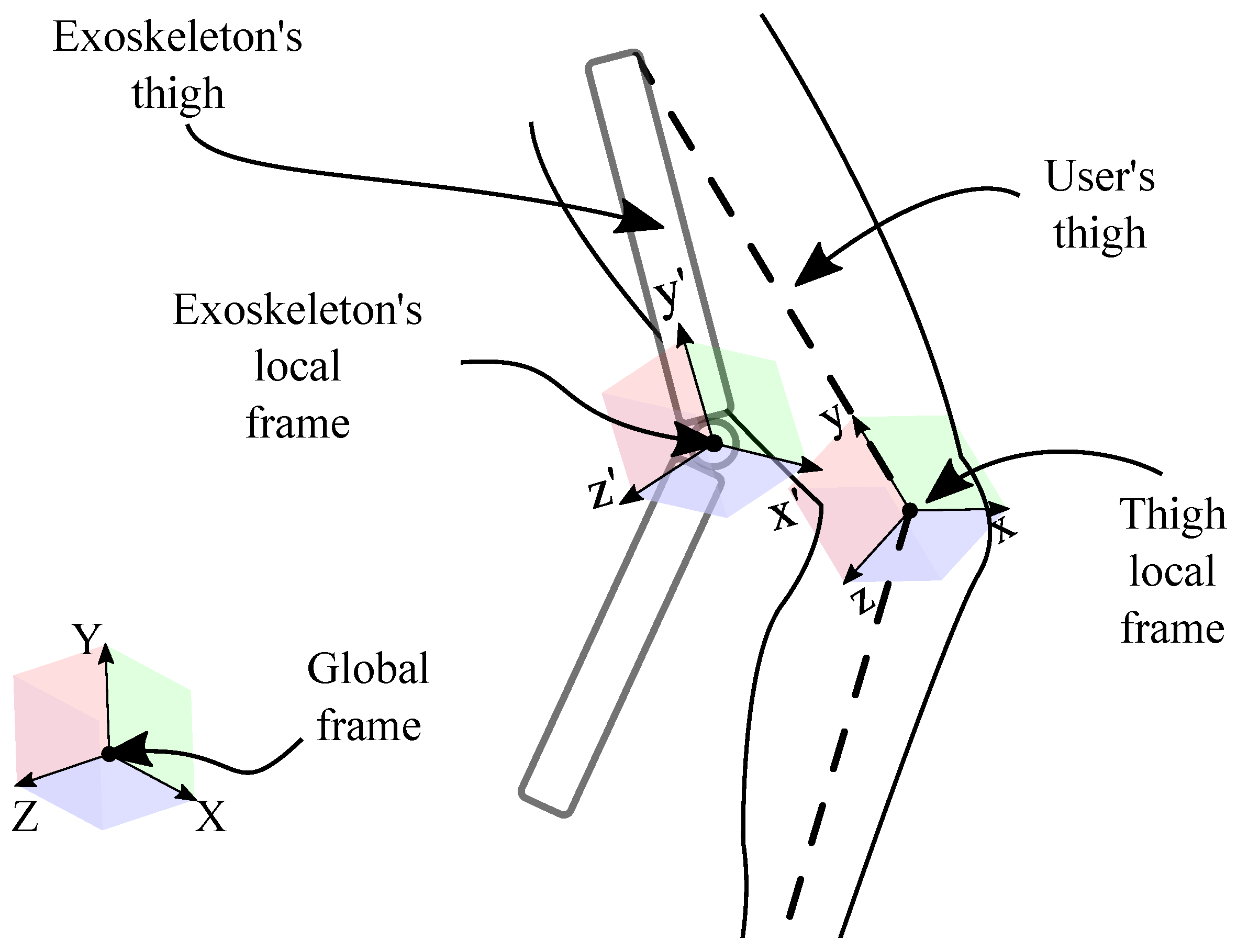
2.1. Three-Dimensional Relative Motion Method
2.2. Experimental Protocol
2.2.1. Subjects
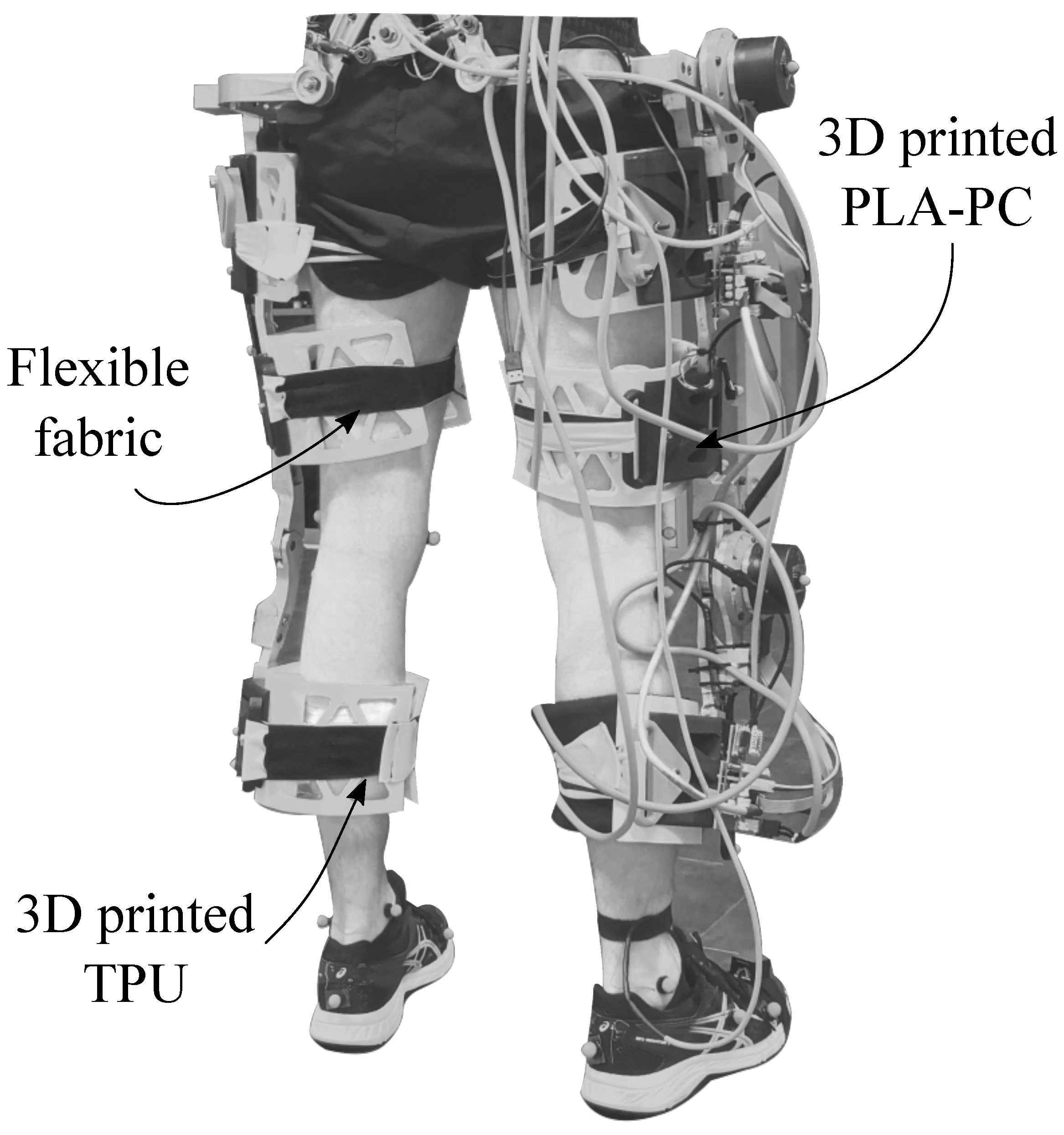
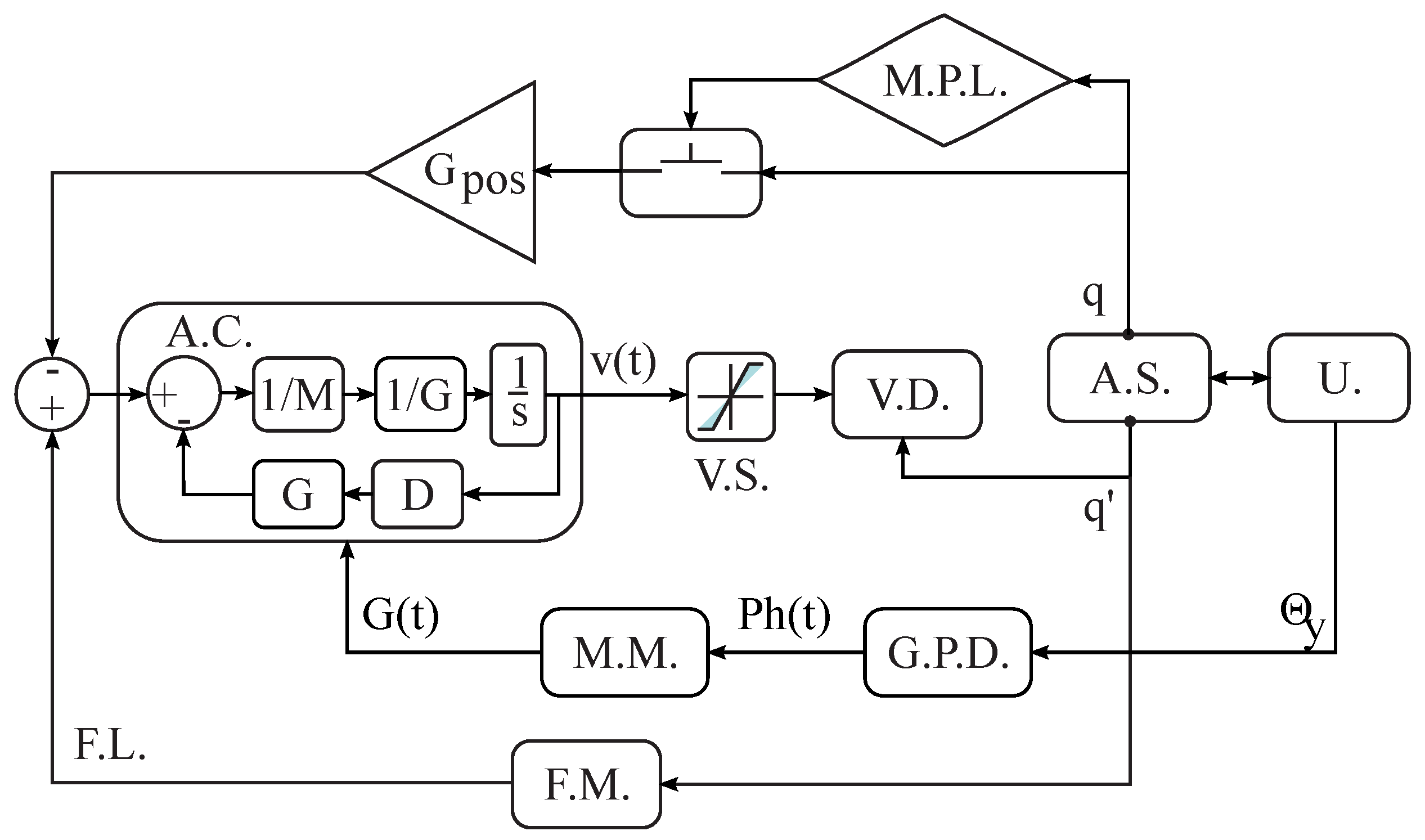
2.2.2. AGoRA Lower-Limb Exoskeleton
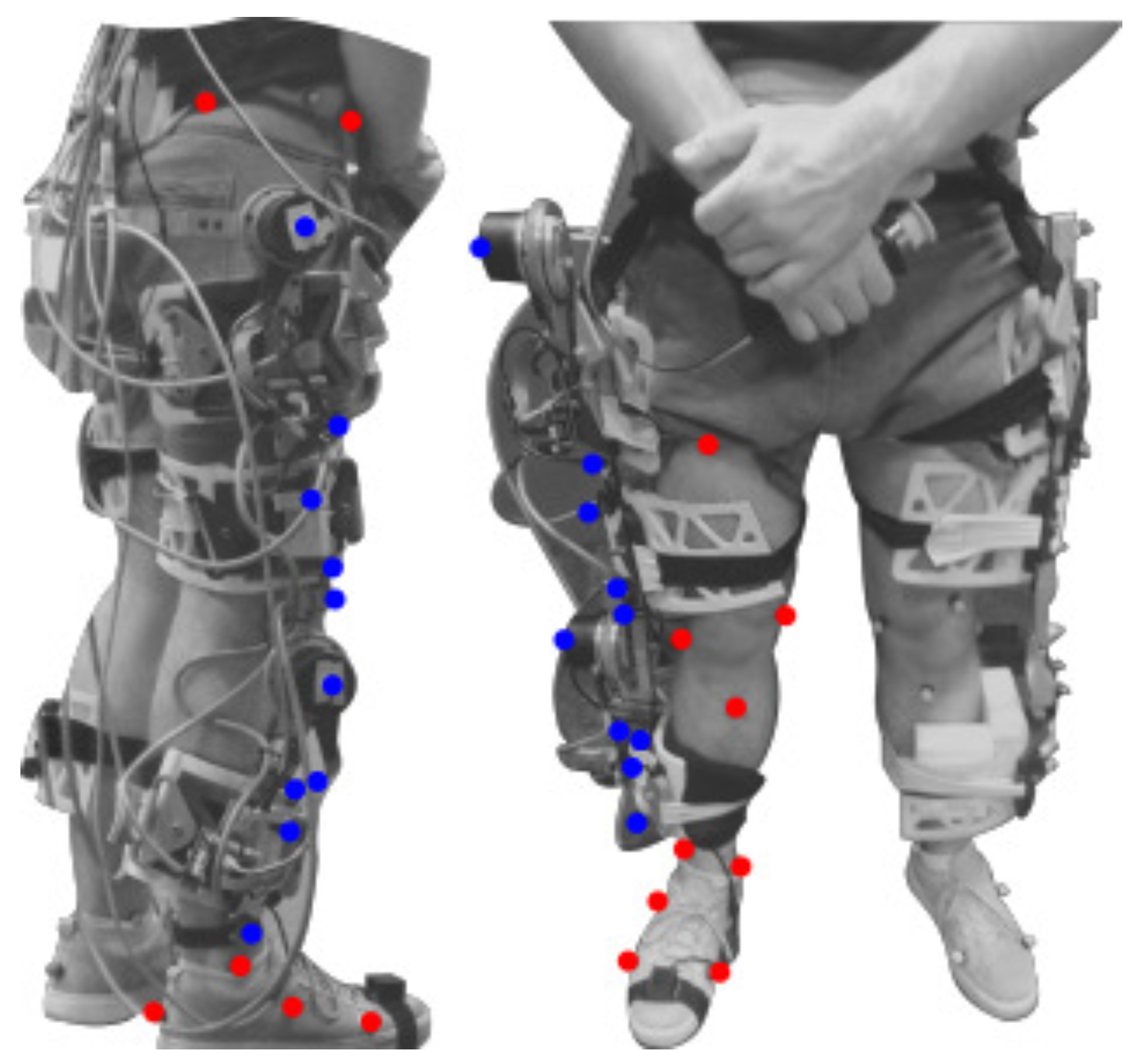
2.2.3. Experimental Setup
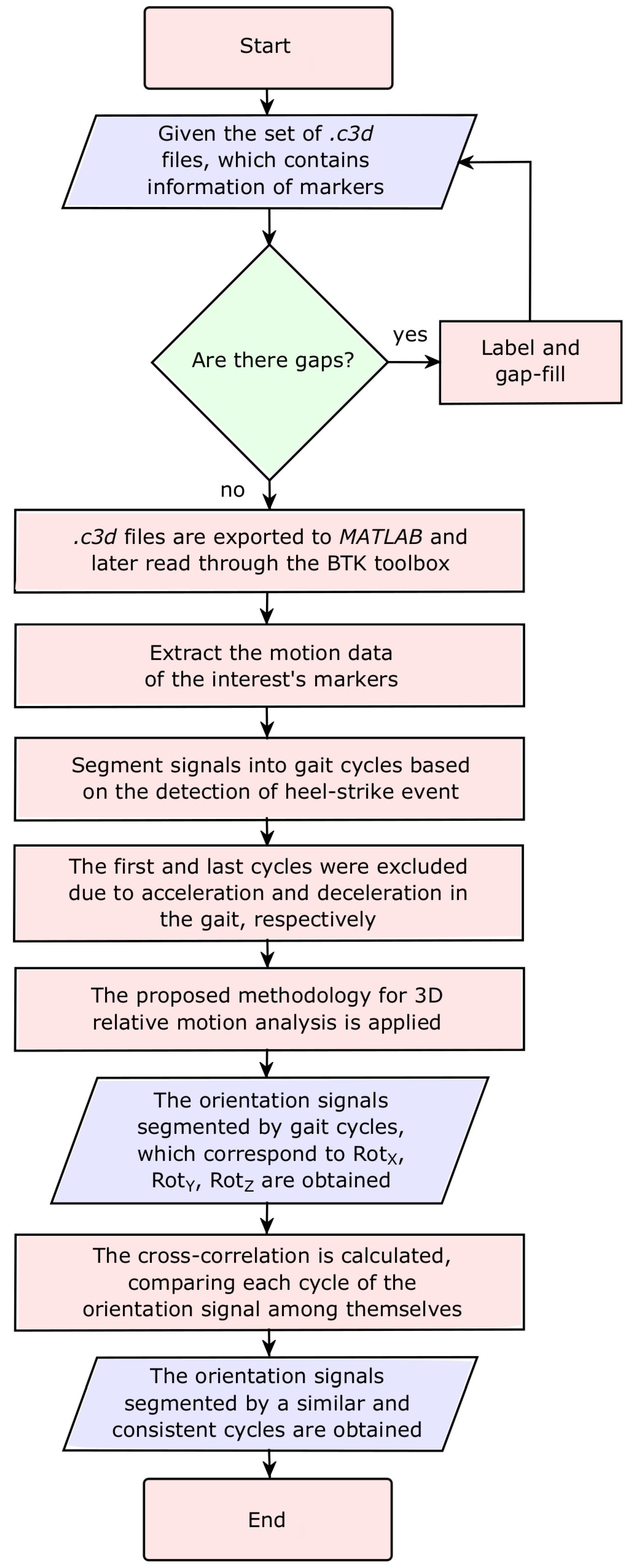
2.2.4. Data Processing and Consistency Analysis
3. Results
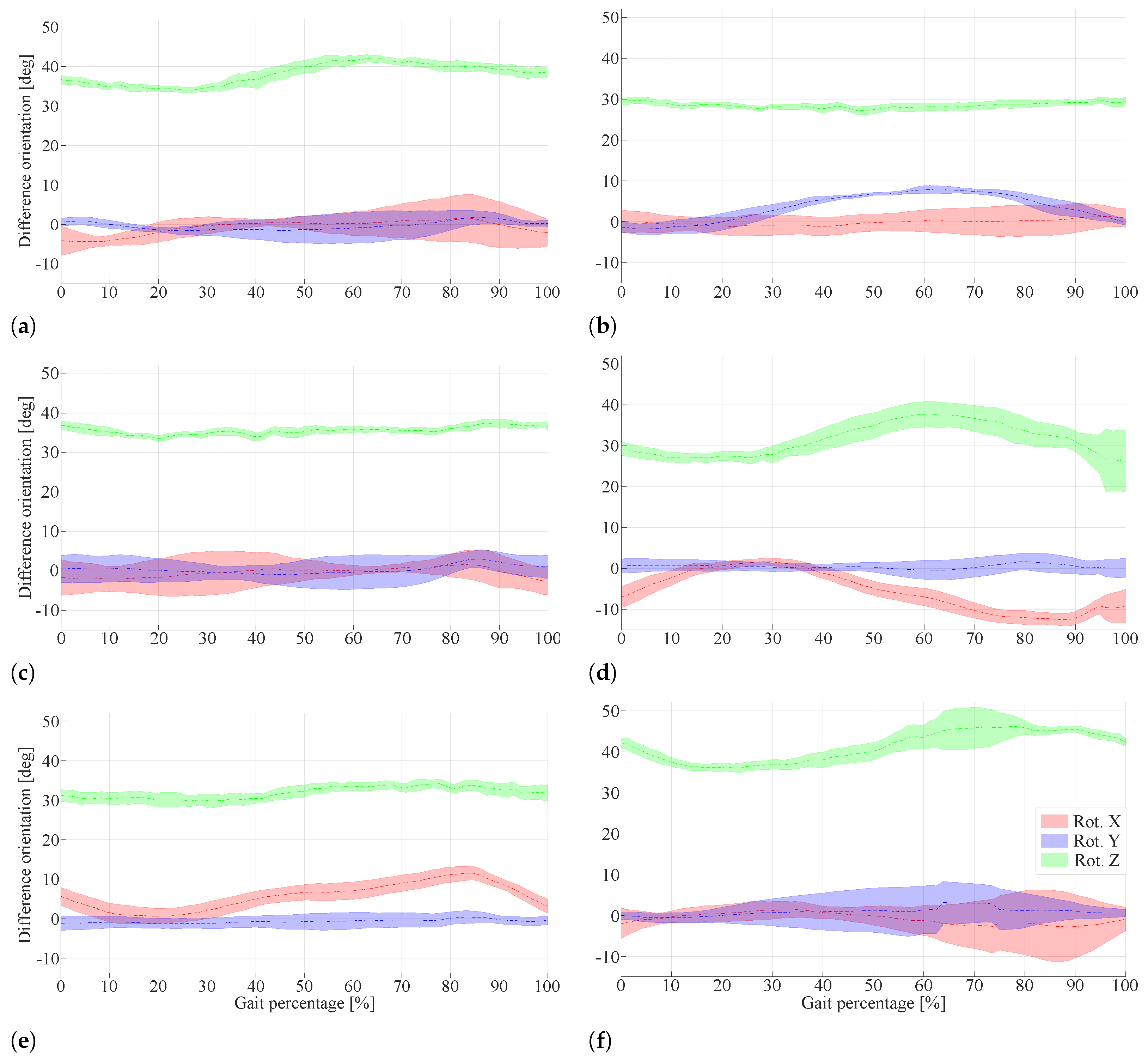
3.1. User’s Interaction
3.2. Methodology’s Consistency
4. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X. A Review on Lower Limb Rehabilitation Exoskeleton Robots. Chin. J. Mech. Eng. 2019, 32, 74. [Google Scholar] [CrossRef] [Green Version]
- Koceska, N.; Koceski, S. Review: Robot Devices for Gait Rehabilitation. Int. J. Comput. Appl. 2013, 62, 1–8. [Google Scholar] [CrossRef]
- Pons, J.L. Wearable Robots; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2008. [Google Scholar]
- Viteckova, S.; Kutilek, P.; Jirina, M. Wearable lower limb robotics: A review. Biocybern. Biomed. Eng. 2013, 33, 96–105. [Google Scholar] [CrossRef]
- Pekna, M.; Pekny, M.; Nilsson, M. Modulation of Neural Plasticity as a Basis for Stroke Rehabilitation. Stroke 2012, 43, 2819–2828. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Simonetti, D.; Tagliamonte, N.L.; Zollo, L.; Accoto, D.; Guglielmelli, E. Biomechatronic Design Criteria of Systems for Robot-Mediated Rehabilitation Therapy; Elsevier Ltd.: Amsterdam, The Netherlands, 2018; pp. 29–46. [Google Scholar] [CrossRef]
- Naf, M.B.; Junius, K.; Rossini, M.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Misalignment Compensation for Full Human-Exoskeleton Kinematic Compatibility: State of the Art and Evaluation. Appl. Mech. Rev. 2018, 70, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Postol, N.; Marquez, J.; Spartalis, S.; Bivard, A.; Spratt, N.J. Do powered over-ground lower limb robotic exoskeletons affect outcomes in the rehabilitation of people with acquired brain injury? Disabil. Rehabil. Assist. Technol. 2019, 14, 764–775. [Google Scholar] [CrossRef]
- Hobbs, B.; Artemiadis, P. A Review of Robot-Assisted Lower-Limb Stroke Therapy: Unexplored Paths and Future Directions in Gait Rehabilitation. Front. Neurorobot. 2020, 14, 19. [Google Scholar] [CrossRef] [Green Version]
- Logan, S.W.; Ross, S.M.; Chee, K.; Stodden, D.F.; Robinson, L.E. Fundamental motor skills: A systematic review of terminology. J. Sport. Sci. 2018, 36, 781–796. [Google Scholar] [CrossRef]
- Asselin, P.K.; Avedissian, M.; Knezevic, S.; Kornfeld, S.; Spungen, A.M. Training persons with spinal cord injury to ambulate using a powered exoskeleton. J. Vis. Exp. 2016, 2016, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Pinto-Fernandez, D.; Torricelli, D.; Sanchez-Villamanan, M.d.C.; Aller, F.; Mombaur, K.; Conti, R.; Vitiello, N.; Moreno, J.C.; Pons, J.L. Performance Evaluation of Lower Limb Exoskeletons: A Systematic Review. IEEE Transact. Neural Syst. Rehabil. Eng. 2020, 28, 1573–1583. [Google Scholar] [CrossRef]
- Geroin, C.; Mazzoleni, S.; Smania, N.; Gandolfi, M.; Bonaiuti, D.; Gasperini, G.; Sale, P.; Munari, D.; Waldner, A.; Spidalieri, R.; et al. Systematic review of outcome measures of walking training using electromechanical and robotic devices in patients with stroke. J. Rehabil. Med. 2013, 45, 987–996. [Google Scholar] [CrossRef] [Green Version]
- Tefertiller, C.; Hays, K.; Jones, J.; Jayaraman, A.; Hartigan, C.; Bushnik, T.; Forrest, G.F. Initial Outcomes from a Multicenter Study Utilizing the Indego Powered Exoskeleton in Spinal Cord Injury. Top. Spinal Cord Inj. Rehabil. 2018, 24, 78–85. [Google Scholar] [CrossRef] [PubMed]
- Bortole, M.; Venkatakrishnan, A.; Zhu, F.; Moreno, J.C.; Francisco, G.E.; Pons, J.L.; Contreras-vidal, J.L. The H2 robotic exoskeleton for gait rehabilitation after stroke: Early findings from a clinical study. J. NeuroEng. Rehab. 2015, 12, 54. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, J.; Zuo, S.; Xu, C.; Zhang, L.; Dong, M.; Tao, C.; Ji, R. Influence of a Compatible Design on Physical Human-Robot Interaction Force: A Case Study of a Self-Adapting Lower-Limb Exoskeleton Mechanism. J. Intell. Robot. Syst. Theory Appl. 2020, 98, 525–538. [Google Scholar] [CrossRef]
- Chen, G.; Chan, C.K.; Guo, Z.; Yu, H. A Review of Lower Extremity Assistive Robotic Exoskeletons in Rehabilitation Therapy. Crit. Rev. Biomed. Eng. 2013, 41, 343–363. [Google Scholar] [CrossRef]
- Kazerooni, H.; Steger, R. The Berkeley lower extremity exoskeleton. J. Dyn. Syst. Meas. Control. Trans. ASME 2006, 128, 14–25. [Google Scholar] [CrossRef]
- Ding, Y.; Panizzolo, F.A.; Siviy, C.; Malcolm, P.; Galiana, I.; Holt, K.G.; Walsh, C.J. Effect of timing of hip extension assistance during loaded walking with a soft exosuit. J. Neuroeng. Rehabil. 2016, 13, 87. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zanotto, D.; Akiyama, Y.; Stegall, P.; Agrawal, S.K. Knee Joint Misalignment in Exoskeletons for the Lower Extremities: Effects on User’s Gait. IEEE Trans. Robot. 2015, 31, 978–987. [Google Scholar] [CrossRef]
- D’Elia, N.; Vanetti, F.; Cempini, M.; Pasquini, G.; Parri, A.; Rabuffetti, M.; Ferrarin, M.; Molino Lova, R.; Vitiello, N. Physical human-robot interaction of an active pelvis orthosis: Toward ergonomic assessment of wearable robots. J. NeuroEng. Rehabil. 2017, 14, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Sanchez-Villamañan, M.D.C.; Gonzalez-Vargas, J.; Torricelli, D.; Moreno, J.C.; Pons, J.L. Compliant lower limb exoskeletons: A comprehensive review on mechanical design principles. J. NeuroEng. Rehabil. 2019, 16, 55. [Google Scholar] [CrossRef]
- Sierra, S.; Arciniegas, L.; Ballen-Moreno, F.; Gomez-Vargas, D.; Munera, M.; Cifuentes, C.A. Adaptable Robotic Platform for Gait Rehabilitation and Assistance: Design Concepts and Applications. In Exoskeleton Robots for Rehabilitation and Healthcare Devices; Springer: Singapore, 2020; pp. 67–93. [Google Scholar] [CrossRef]
- Langlois, K.; Moltedo, M.; Bacek, T.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Design and Development of Customized Physical Interfaces to Reduce Relative Motion Between the User and a Powered Ankle Foot Exoskeleton. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 1083–1088. [Google Scholar] [CrossRef]
- Akiyama, Y.; Okamoto, S.; Yamada, Y.; Ishiguro, K. Measurement of contact behavior including slippage of cuff when using wearable physical assistant robot. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 784–793. [Google Scholar] [CrossRef] [PubMed]
- Leal-Junior, A.; Theodosiou, A.; Díaz, C.; Marques, C.; Pontes, M.J.; Kalli, K.; Frizera-Neto, A. Fiber Bragg gratings in CYTOP fibers embedded in a 3D-printed flexible support for assessment of human-robot interaction forces. Materials 2018, 11, 2305. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rathore, A.; Wilcox, M.; Ramirez, D.Z.M.; Loureiro, R.; Carlson, T. Quantifying the human-robot interaction forces between a lower limb exoskeleton and healthy users. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, Orlando, FL, USA, 16–20 August 2016; pp. 586–589. [Google Scholar] [CrossRef] [Green Version]
- Yandell, M.B.; Quinlivan, B.T.; Popov, D.; Walsh, C.; Zelik, K.E. Physical interface dynamics alter how robotic exosuits augment human movement: Implications for optimizing wearable assistive devices. J. NeuroEng. Rehabil. 2017, 14, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Sanchez-Manchola, M.; Gomez-Vargas, D.; Casas-Bocanegra, D.; Munera, M.; Cifuentes, C.A. Development of a Robotic Lower-Limb Exoskeleton for Gait Rehabilitation: AGoRA Exoskeleton; IEEE: Piscatway, NJ, USA, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Hibbeler, R. Engineering Mechanics: Dynamics; Pearson Education: London, UK, 2011. [Google Scholar]
- Manchola, M.D.S.; Bernal, M.J.P.P.; Munera, M.; Cifuentes, C.A. Gait Phase Detection for Lower-Limb Exoskeletons using Foot Motion Data from a Single Inertial Measurement Unit in Hemiparetic Individuals. Sensors 2019, 19, 2988. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arciniegas-Mayag, L.J.; Munera, M.; Cifuentes, C.A. Human-in-the-Loop Control for AGoRA Unilateral Lower-Limb Exoskeleton. J. Intel. Robot. Syst. 2022, 104, 3. [Google Scholar] [CrossRef]
- Opensource. BTK Matlab Wrapper: BTK Matlab Wrapper Documentation. 2013. Available online: http://biomechanical-toolkit.github.io/docs/Wrapping/Matlab/ (accessed on 10 September 2020).
- Kawalec, J. 12—Mechanical testing of foot and ankle implants. In Mechanical Testing of Orthopaedic Implants; Friis, E., Ed.; Woodhead Publishing: Sawston, UK, 2017; pp. 231–253. [Google Scholar] [CrossRef]
- Schmeltzpfenning, T.; Brauner, T. 2—Foot biomechanics and gait. In Handbook of Footwear Design and Manufacture; Luximon, A., Ed.; Woodhead Publishing Series in Textiles; Woodhead Publishing: Sawston, UK, 2013; pp. 27–48. [Google Scholar] [CrossRef]
- Perry, J. Gait Analysis; Slack Incorporated: West Deptford, NJ, USA, 1992; p. 524. [Google Scholar]
- Morelli, M.S.; Giannoni, A.; Passino, C.; Landini, L.; Emdin, M.; Vanello, N. A Cross-Correlational Analysis between Electroencephalographic and End-Tidal Carbon Dioxide Signals: Methodological Issues in the Presence of Missing Data and Real Data Results. Sensors 2016, 16, 1828. [Google Scholar] [CrossRef] [Green Version]
- Simpson, D.M.; Catelli Infantosi, A.F.; Botero-Rosas, D. Estimation and significance testing of cross-correlation between cerebral blood flow velocity and background electro-encephalograph activity in signals with missing samples. Med. Biol. Eng. Comput. 2001, 39, 428–433. [Google Scholar] [CrossRef]
- Sanchez-Manchola, M. Development of Control Straetgies in a Robotic Lower-limb Exoskeleton for Patientes with Mobility Impairments. Master’s Thesis, Colombian School of Engineering Julio Garavito, Bogotá, Colombia, 2019. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Device | Task | Variable | Plane of Study | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| D | R | F | T | P | S | F | T | |||
| D’Elia et al. [21] | Pelvis orthosis | G | X | - | - | - | - | X | - | - |
| Langlois et al. [24] | Ankle-foot orthosis | G | X | - | - | - | - | X | - | X |
| Akiyama et al. [25] | Lower-limb exoskeleton | StS | X | X | - | - | - | X | - | - |
| Leal-Junior et al. [26] | Knee exoskeleton | MT | - | - | X | - | - | X | - | - |
| Rathore et al. [27] | REX | G | - | - | X | - | - | X | - | - |
| Li et al. [16] | Lower-limb exoskeleton | G | - | - | X | X | - | X | X | X |
| Yandell et al. [28] | Ankle-foot orthosis | G | - | - | - | - | X | X | - | - |
| Subject | Weight [kg] | Height [m] | Age [y.o.] |
|---|---|---|---|
| 1 | 70 | 1.82 | 29 |
| 2 | 65 | 1.77 | 22 |
| 3 | 80 | 1.82 | 38 |
| 4 | 64 | 1.78 | 21 |
| 5 | 70 | 1.85 | 21 |
| 6 | 90 | 1.79 | 29 |
| M. ± S.D. | 73.17 ± 10.01 | 1.81 ± 0.03 | 26.67 ± 6.71 |
| Subj. | Rot. | Range of Rotation | |||
|---|---|---|---|---|---|
| O.M. | M. | S.D. | C.V. | ||
| Z | 38.15 | 8.12 | 2.81 | 34.58 | |
| 1 | X | −0.72 | 5.34 | 3.26 | 61.04 |
| Y | 1.11 | 3.55 | 1.76 | 49.60 | |
| Z | 28.45 | 2.57 | 1.57 | 61.08 | |
| 2 | X | −0.12 | 2.52 | 1.90 | 75.17 |
| Y | 3.63 | 9.64 | 2.03 | 21.14 | |
| Z | 35.55 | 4.02 | 1.91 | 47.45 | |
| 3 | X | −0.32 | 4.26 | 2.87 | 67.47 |
| Y | 0.22 | 5.96 | 2.10 | 35.29 | |
| Z | 31.52 | 11.50 | 8.79 | 76.07 | |
| 4 | X | −5.50 | 14.18 | 4.53 | 31.78 |
| Y | 0.44 | 2.12 | 1.66 | 78.06 | |
| Z | 31.79 | 4.39 | 2.94 | 67.00 | |
| 5 | X | 5.60 | 10.92 | 3.42 | 31.50 |
| Y | −0.67 | 1.73 | 1.90 | 110.12 | |
| Z | 41.10 | 10.17 | 5.83 | 57.34 | |
| 6 | X | −0.81 | 4.16 | 2.86 | 68.84 |
| Y | 0.87 | 3.64 | 1.85 | 60.00 | |
| Subject | Rotation | Difference of Rotation [deg] | |||
|---|---|---|---|---|---|
| Gait Percentage [%] | |||||
| Flat Foot 0–10 | Heel Off 10–50 | Toe Off 50–73 | Heel Strike 73–100 | ||
| Z | 1.71 | 4.80 | 1.13 | 2.61 | |
| 1 | X | 0.38 | 3.87 | 0.45 | 2.99 |
| Y | 0.21 | 2.56 | 0.71 | 3.13 | |
| Z | 0.65 | 1.15 | 1.14 | 0.80 | |
| 2 | X | 0.60 | 0.25 | 0.32 | 0.77 |
| Y | 0.08 | 8.02 | 0.39 | 7.25 | |
| Z | 1.72 | 0.43 | 0.09 | 1.01 | |
| 3 | X | 0.40 | 2.28 | 0.80 | 3.64 |
| Y | 0.19 | 4.46 | 1.05 | 4.68 | |
| Z | 2.01 | 7.97 | 0.79 | 9.71 | |
| 4 | X | 4.95 | 3.04 | 6.40 | 2.27 |
| Y | 0.14 | 0.54 | 0.65 | 0.80 | |
| Z | 0.84 | 1.96 | 1.55 | 2.11 | |
| 5 | X | 4.30 | 5.33 | 2.91 | 6.36 |
| Y | 0.32 | 0.11 | 0.33 | 0.02 | |
| Z | 5.05 | 3.01 | 5.76 | 3.58 | |
| 6 | X | 1.90 | 0.03 | 2.55 | 1.81 |
| Y | 0.53 | 1.81 | 1.47 | 2.01 | |
| Z | 1.99 | 3.22 | 1.74 | 3.30 | |
| M | X | 2.08 | 2.46 | 2.23 | 2.97 |
| Y | 0.24 | 2.91 | 0.76 | 2.98 | |
| Subject | Rotation | ||
|---|---|---|---|
| Z | X | Y | |
| 1 | 0.9969 | 0.0707 | 0.1108 |
| 2 | 0.9975 | 0.0172 | 0.8057 |
| 3 | 0.9977 | 0.0353 | 0.1251 |
| 4 | 0.9773 | 0.8482 | 0.0293 |
| 5 | 0.9946 | 0.8003 | 0.0521 |
| 6 | 0.9938 | 0.0305 | 0.0237 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ballen-Moreno, F.; Bautista, M.; Provot, T.; Bourgain, M.; Cifuentes, C.A.; Múnera, M. Development of a 3D Relative Motion Method for Human–Robot Interaction Assessment. Sensors 2022, 22, 2411. https://doi.org/10.3390/s22062411
Ballen-Moreno F, Bautista M, Provot T, Bourgain M, Cifuentes CA, Múnera M. Development of a 3D Relative Motion Method for Human–Robot Interaction Assessment. Sensors. 2022; 22(6):2411. https://doi.org/10.3390/s22062411
Chicago/Turabian StyleBallen-Moreno, Felipe, Margarita Bautista, Thomas Provot, Maxime Bourgain, Carlos A. Cifuentes, and Marcela Múnera. 2022. "Development of a 3D Relative Motion Method for Human–Robot Interaction Assessment" Sensors 22, no. 6: 2411. https://doi.org/10.3390/s22062411