
An Unsupervised Tunnel Damage Identification Method Based on Convolutional Variational Auto-Encoder and Wavelet Packet Analysis


Abstract
:1. Introduction
2. Methodology
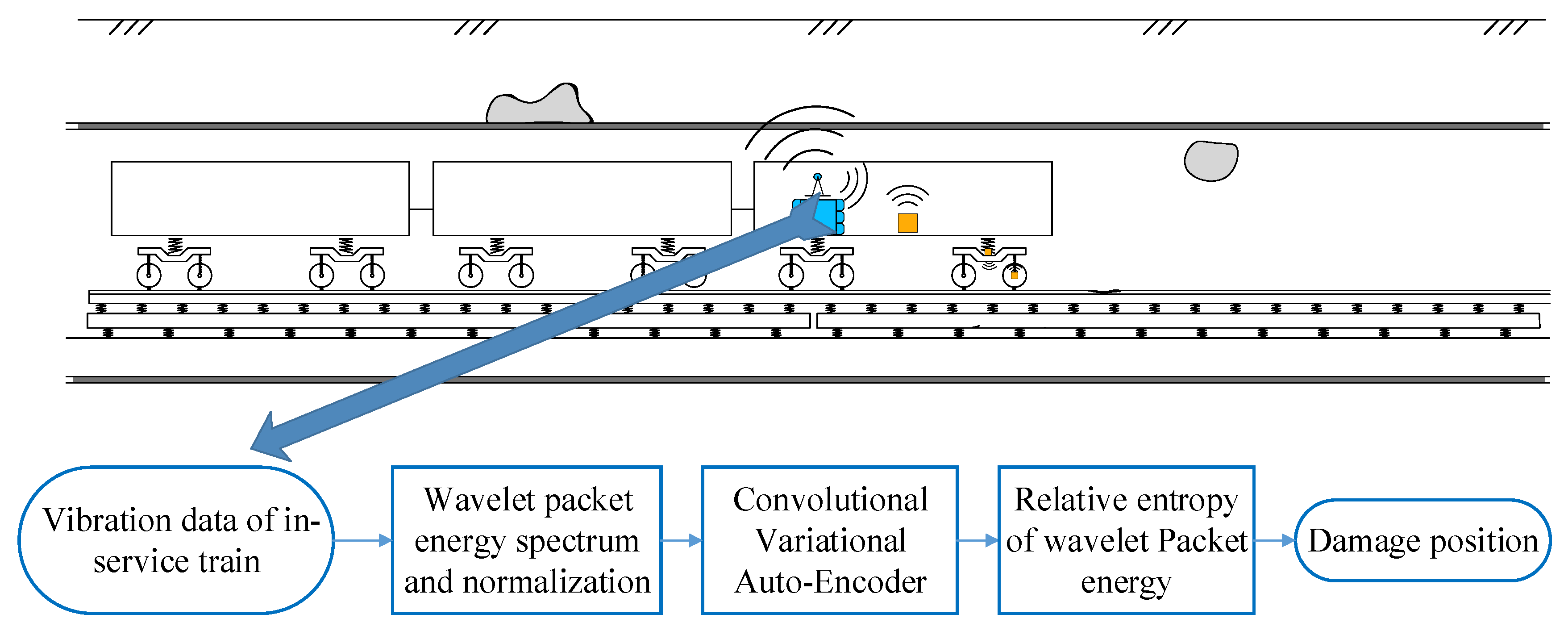
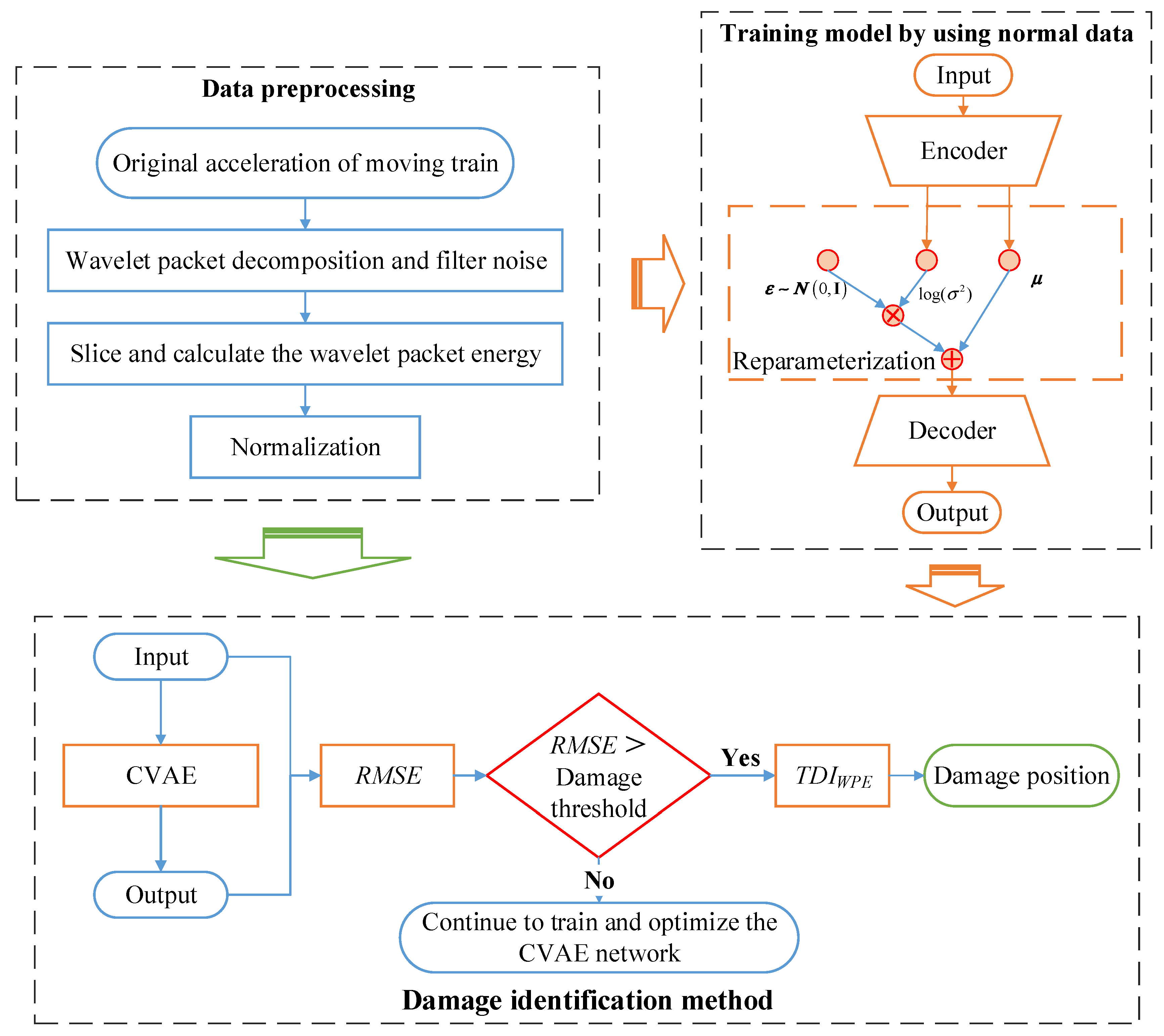
2.1. Method Overview
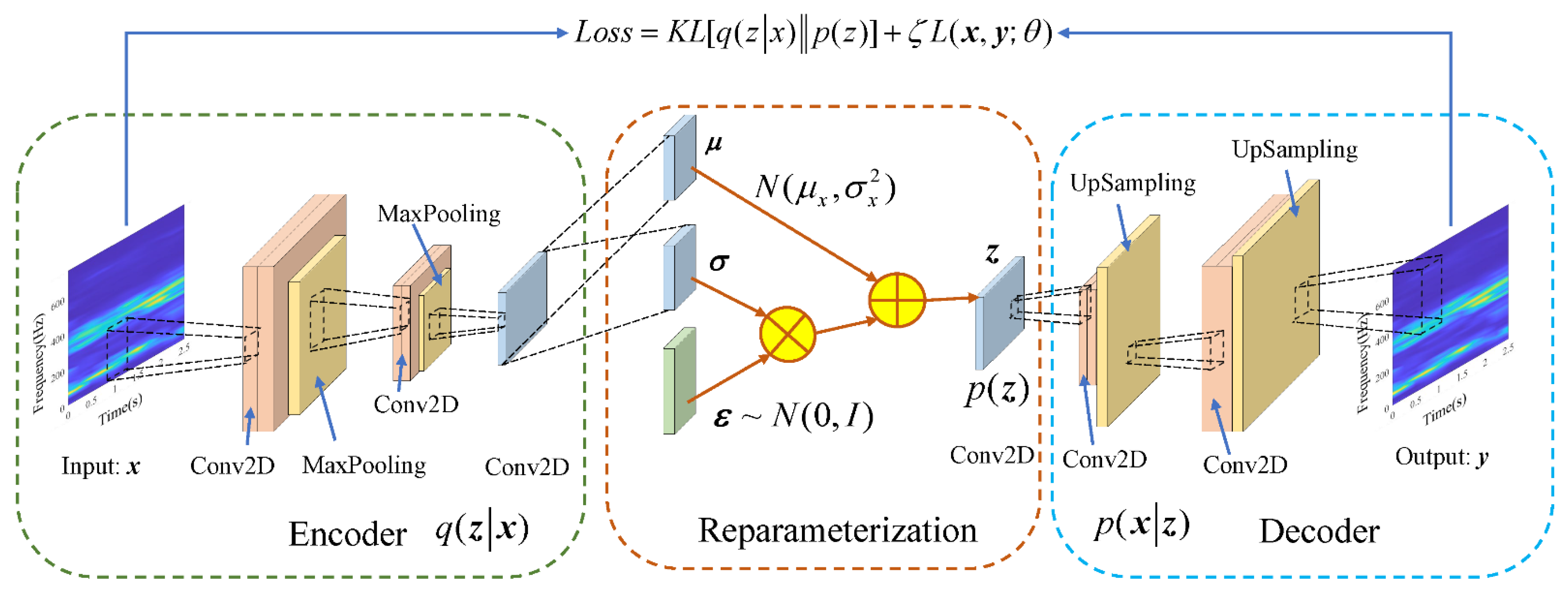
2.2. CVAE
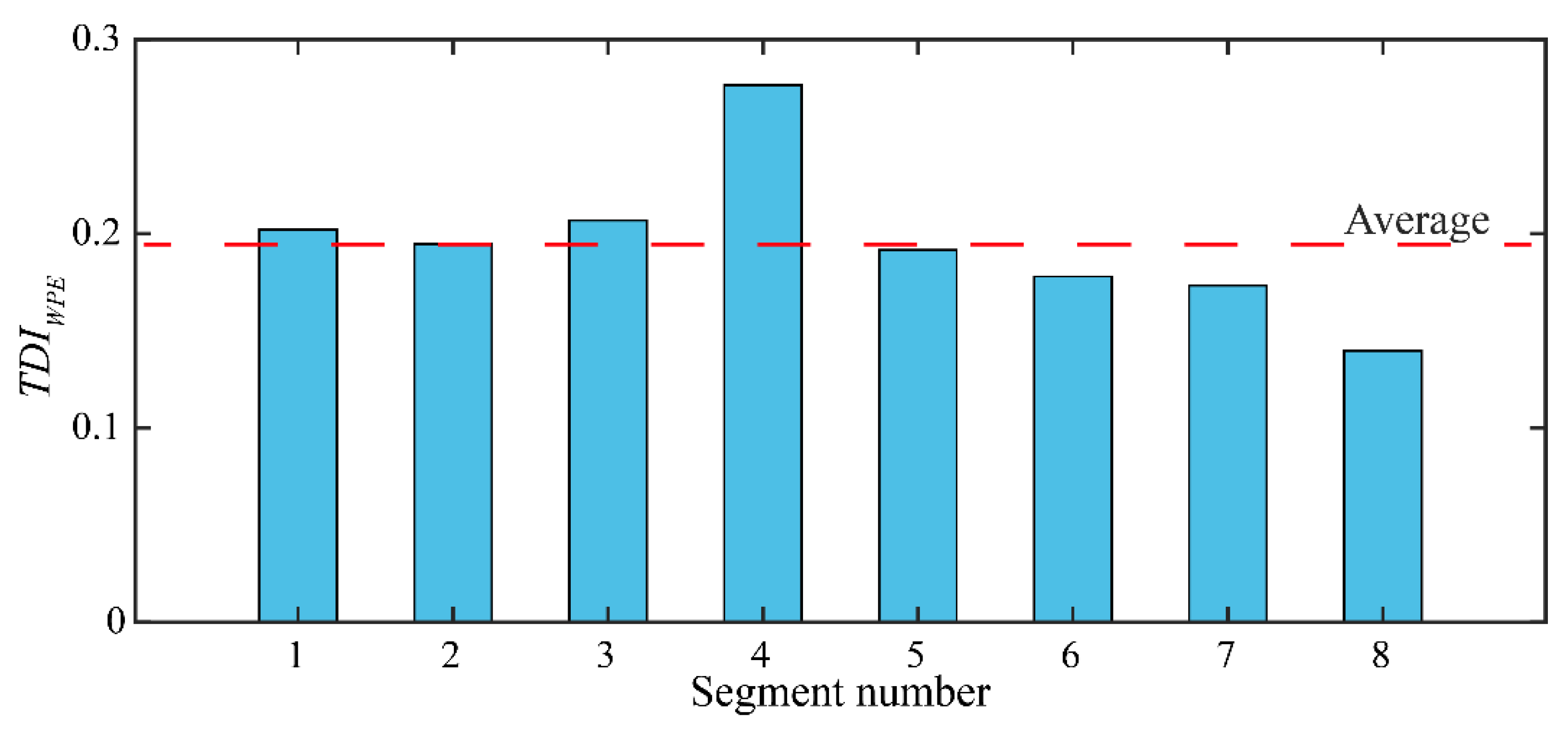
2.3. Relative Entropy of Wavelet Packet Energy
3. Experimental Validations
3.1. Experimental Test
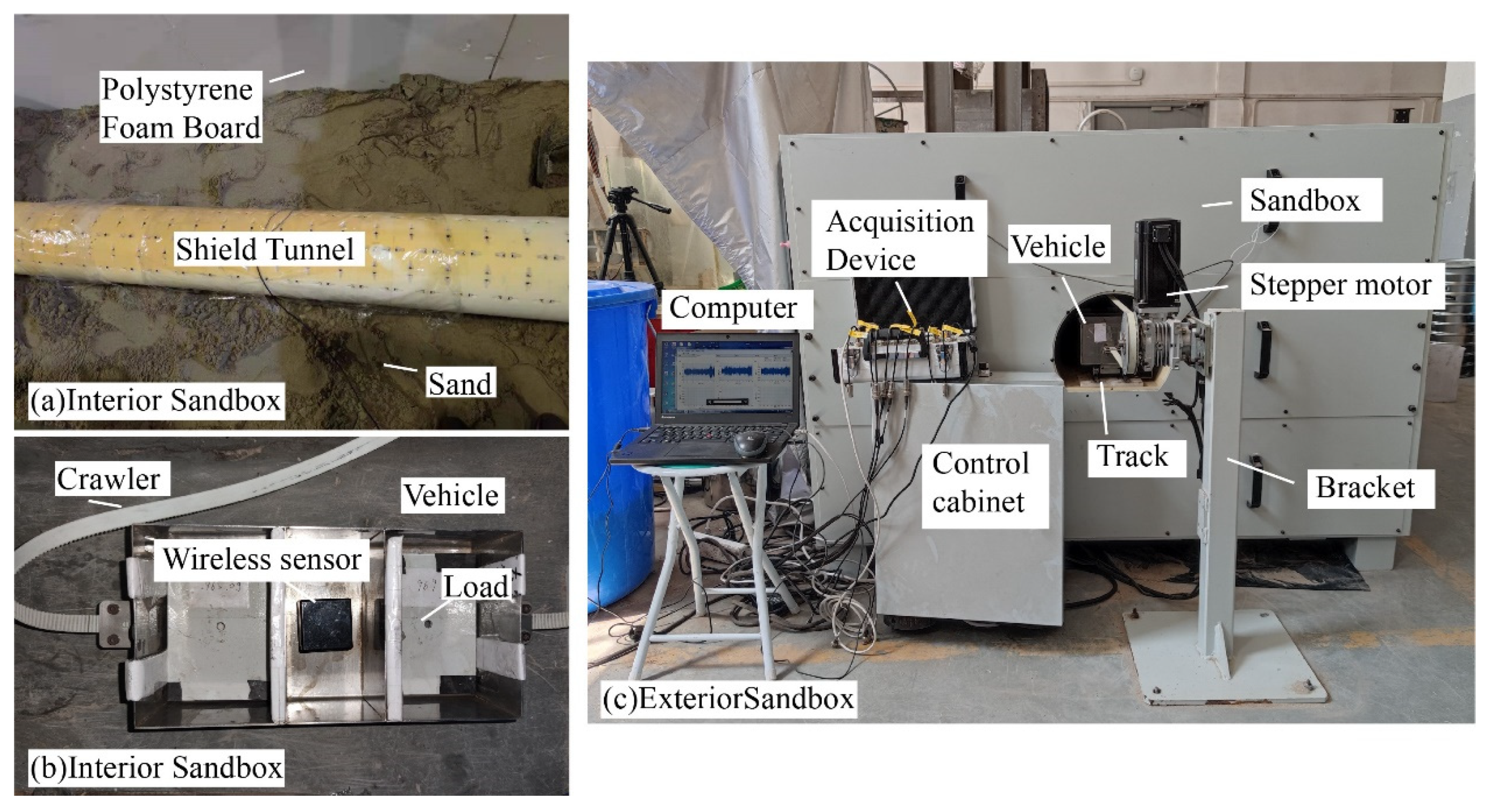
3.1.1. Laboratory Physical Modeling System
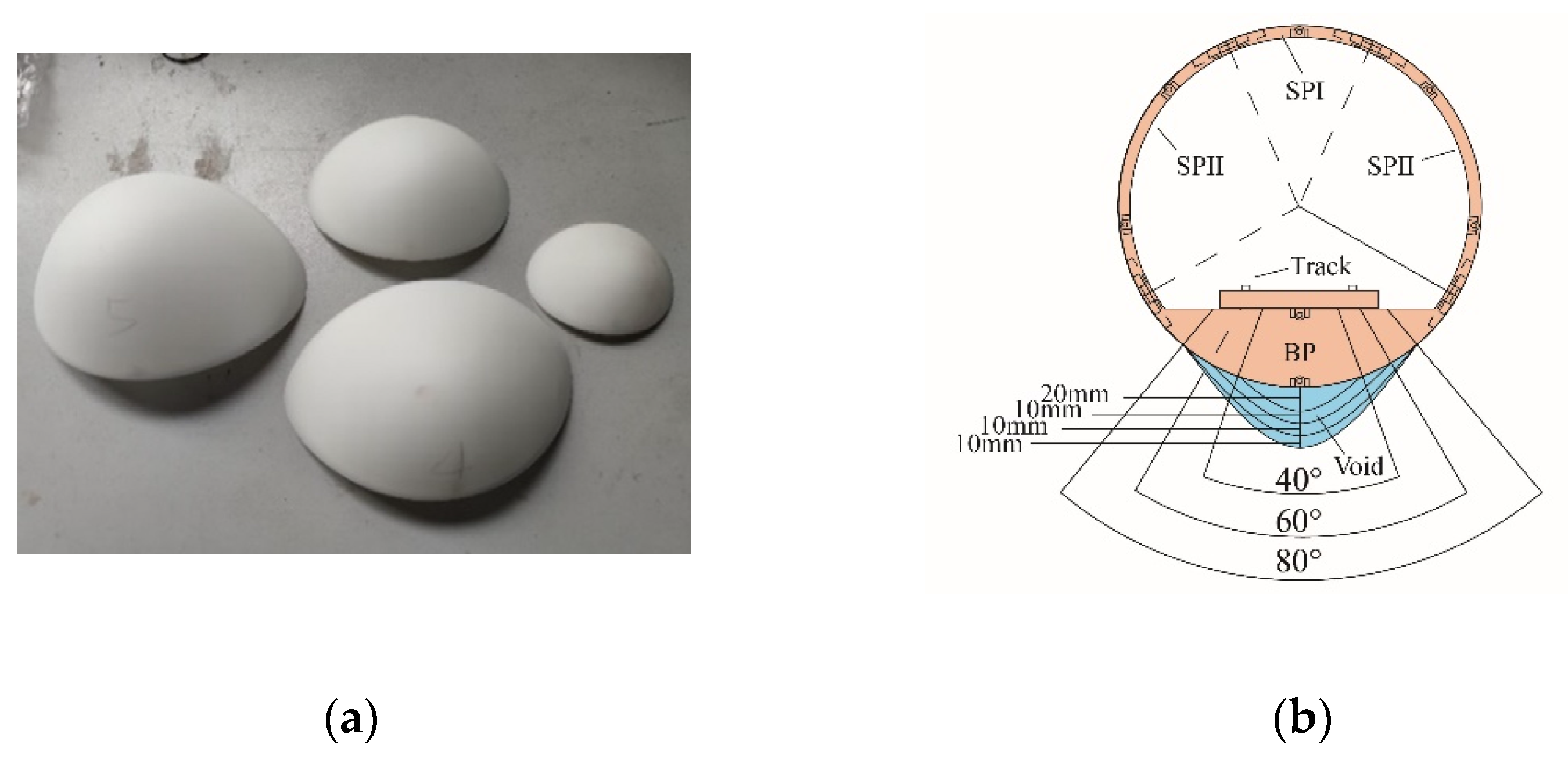
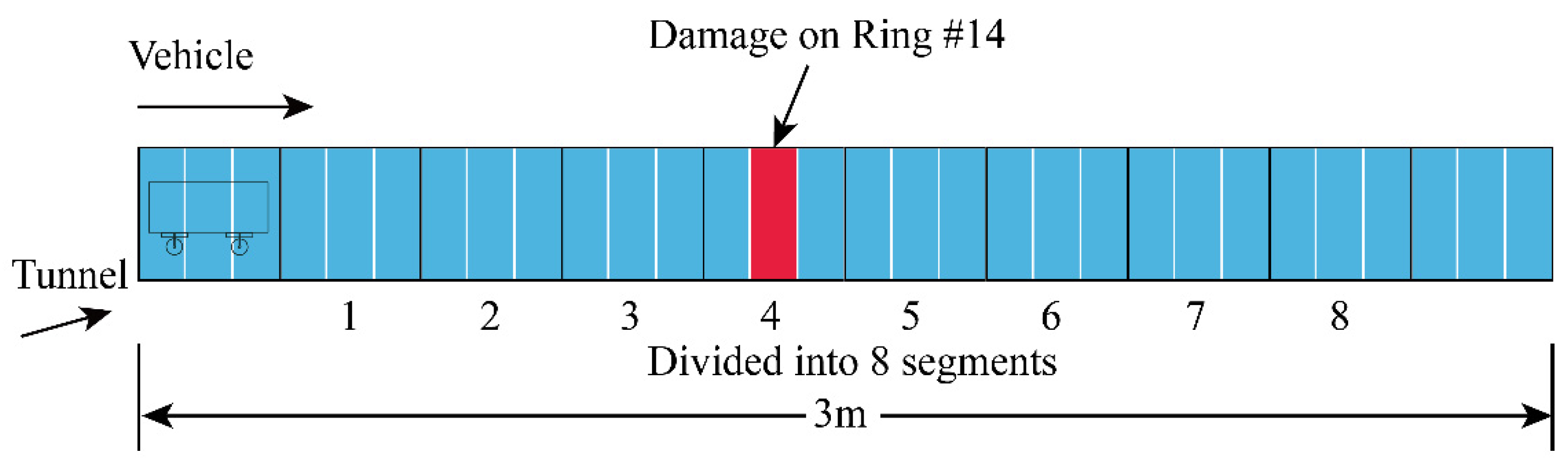
3.1.2. Damage Setup
3.1.3. Test Conditions
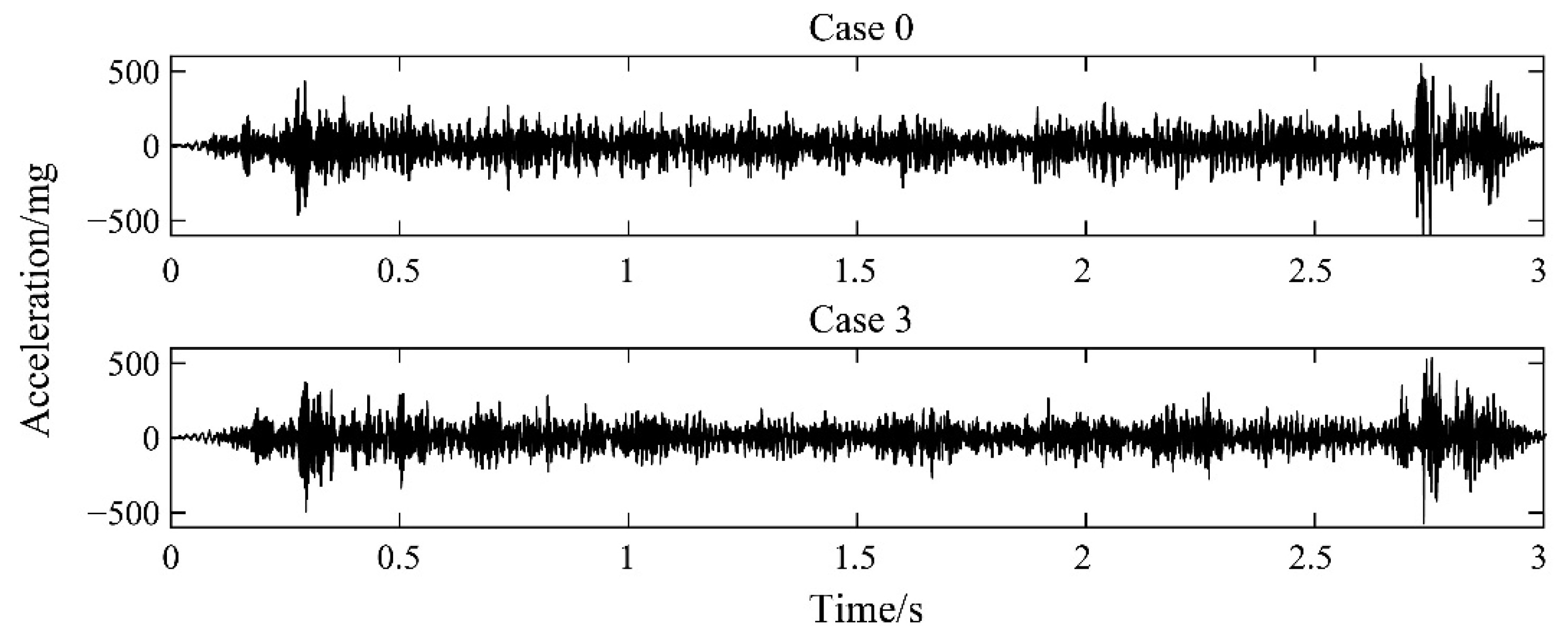
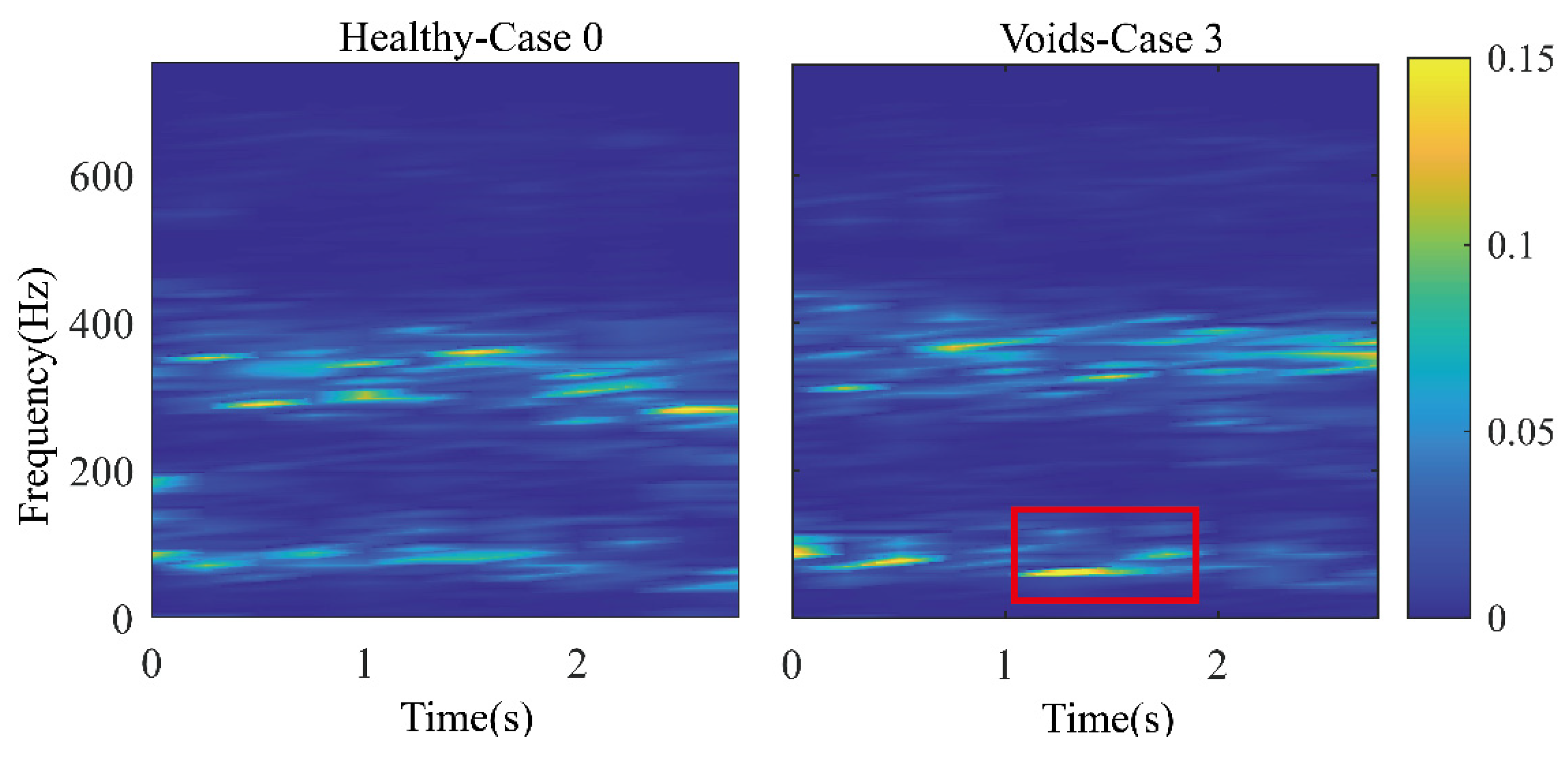
3.2. Data Preprocessing
3.3. CVAE Model Establishing and Training
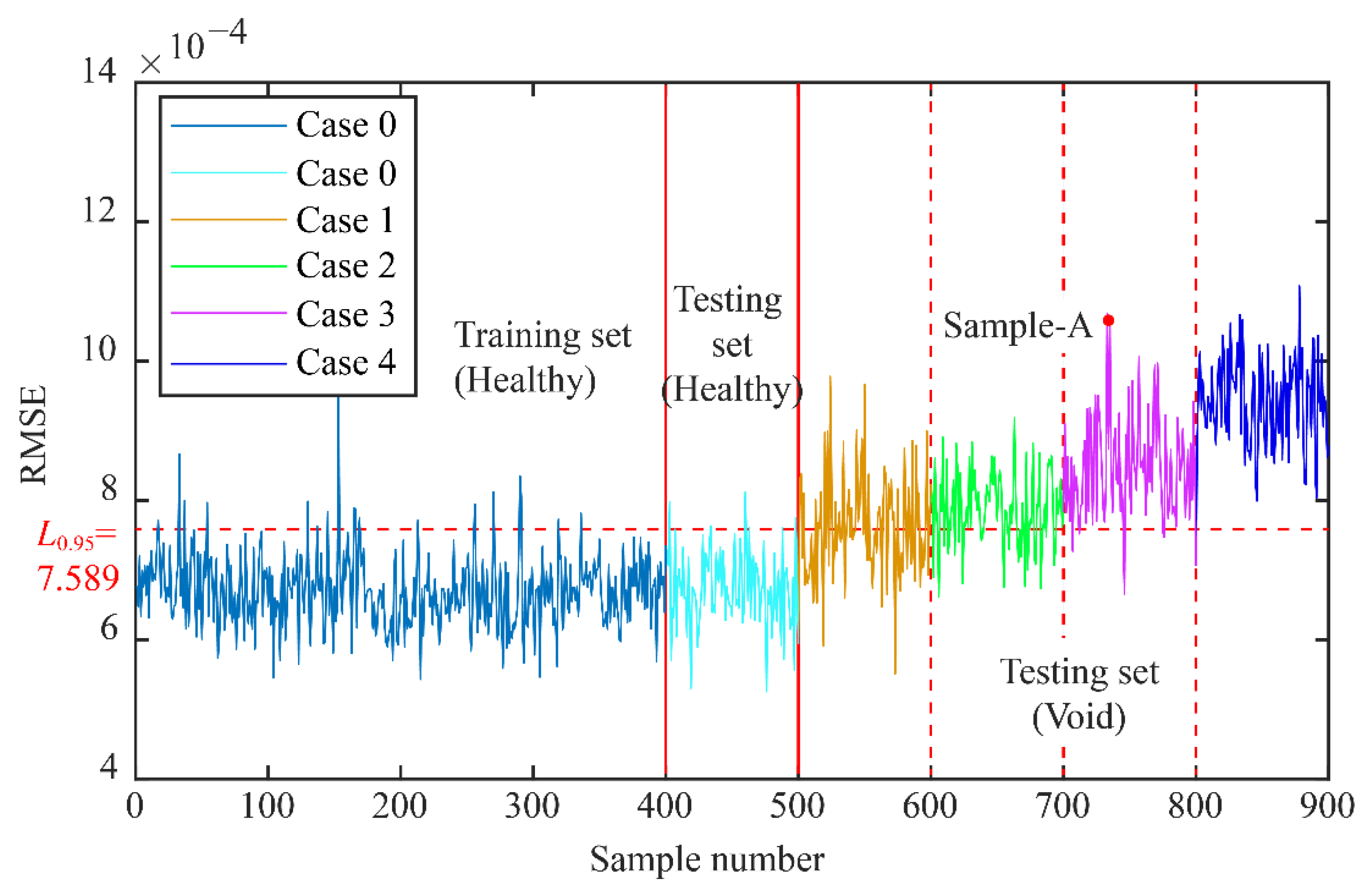
3.4. Damage Identification
3.4.1. Performance Evaluation Metric
3.4.2. Void Identification
4. Discussion
4.1. Compared with Other Unsupervised Methods
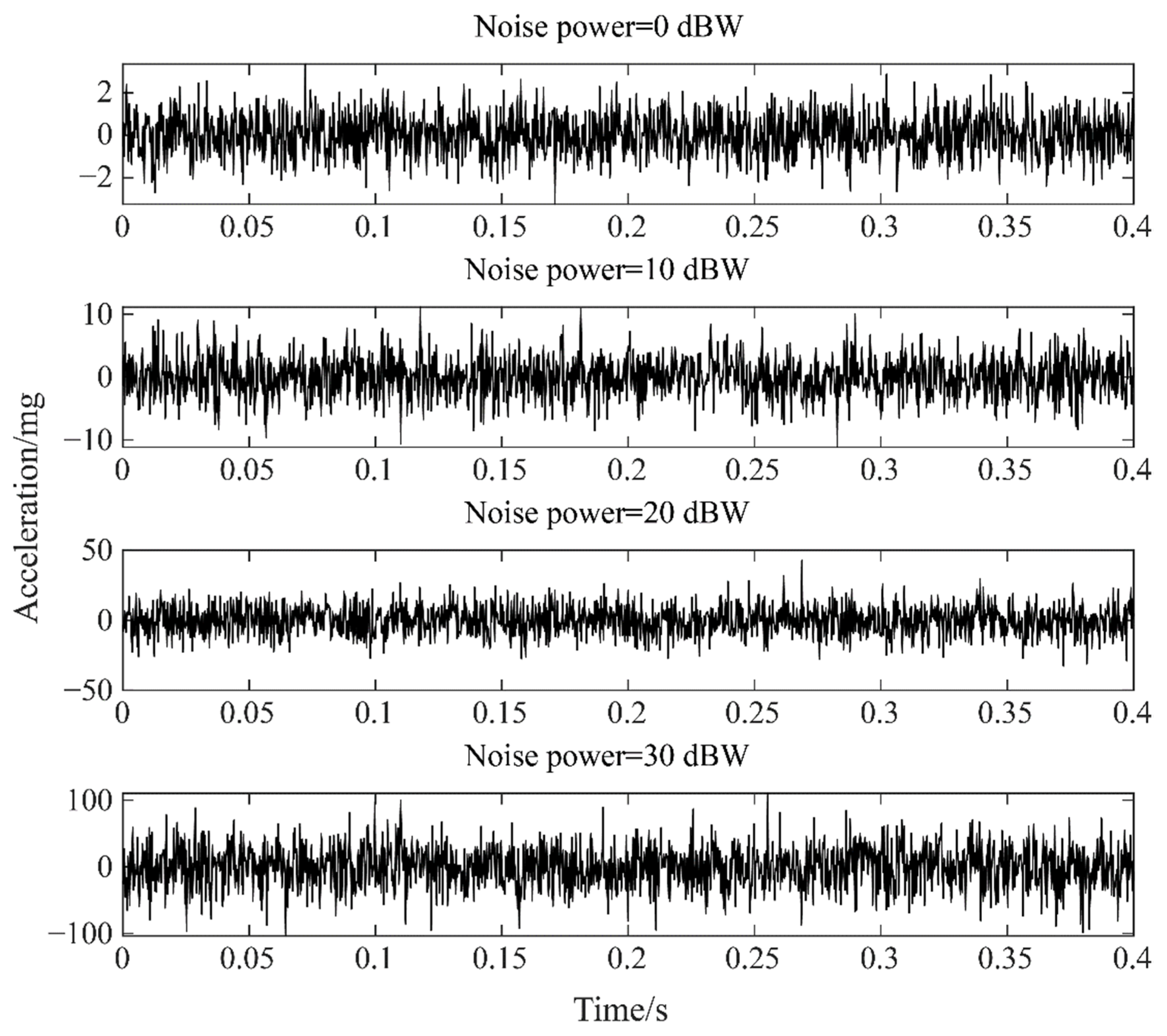
4.2. Noise Immunity
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ou, J. Research and practice of smart sensor networks and health monitoring systems for civil infrastructures in mainland China. Bull. Natl. Nat. Sci. Found. China 2005, 19, 8–12. [Google Scholar]
- Bao, Y.; Chen, Z.; Wei, S.; Xu, Y.; Tang, Z.; Li, H. The state of the art of data science and engineering in structural health monitoring. Engineering 2019, 5, 234–242. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, P.; Zhou, C.; Huang, Y.; Zhang, L. Structural Health Monitoring of Underground Structures in Reclamation Area Using Fiber Bragg Grating Sensors. Sensors 2019, 19, 2849. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, H.; Xie, X.; Zhang, Y.; Wang, Q. Theoretical, Numerical, and Experimental Study on the Identification of Subway Tunnel Structural Damage Based on the Moving Train Dynamic Response. Sensors 2021, 21, 7197. [Google Scholar] [CrossRef]
- Xie, X.; Zhang, D.; Huang, H. Data Analysis of Shield Tunnel Deformation from Real-Time Monitoring with Wireless Sensing Network. In Geoshanghai International Conference; Springer: Singapore, 2018; pp. 392–401. [Google Scholar]
- Yang, Y.; Yau, J. Vehicle-Bridge Interaction Element for Dynamic Analysis. J. Struct. Eng. 1997, 123, 1512–1518. [Google Scholar] [CrossRef]
- Yang, Y.B.; Chen, W.F. Extraction of Bridge Frequencies from a Moving Test Vehicle by Stochastic Subspace Identification. J. Bridge Eng. 2016, 21, 04015053. [Google Scholar] [CrossRef]
- Yang, Y.; Peng, Z.; Zhang, W.; Meng, G. Parameterised time-frequency analysis methods and their engineering applications: A review of recent advances. Mech. Syst. Signal Pr. 2019, 119, 182–221. [Google Scholar] [CrossRef]
- Yeong-bin, Y.; Zhi-lu, W.; Kang, S.; Hao, X. Research Progress on Bridge Indirect Measurement and Monitoring from Moving Vehicle Response. China J. Highw. Transp. 2021, 34, 1–12. [Google Scholar]
- Berggren, E. Railway Track Stiffness: Dynamic Measurements and Evaluation for Efficient Maintenance. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2009. [Google Scholar]
- Quirke, P.; Cantero, D.; OBrien, E.J.; Bowe, C. Drive-by detection of railway track stiffness variation using in-service vehicles. Proc. Inst. Mech. Engineers. Part F J. Rail Rapid Transit 2017, 231, 498–514. [Google Scholar] [CrossRef] [Green Version]
- Kratochwille, R. ICE-S Vehicle reaction measurement and track geometry measurement on the same measuring train Results of the comparison of the two different track inspection methods. In Proceedings of the IMechE Stephenson Conference for Railways, London, UK, 21-23 April 2015; p. C1408/068. [Google Scholar]
- Zhang, Y.L.; Xie, X.Y.; Li, H.Q.; Zhou, B. Tunnel damage identification method based on relative entropy of wavelet packet energy: An experimental verification. IOP Conf. Ser. Earth Environ. Sci. 2020, 570, 032034. [Google Scholar] [CrossRef]
- Azimi, M.; Eslamlou, A.D.; Pekcan, G. Data-driven structural health monitoring and damage detection through deep learning: State-of-the-art review. Sensors 2020, 20, 2778. [Google Scholar] [CrossRef] [PubMed]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R.X. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Pr. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Salehi, H.; Burgueño, R. Emerging artificial intelligence methods in structural engineering. Eng. Struct. 2018, 171, 170–189. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Suh, G.; Mahmoudkhani, S.; Büyüköztürk, O. Autonomous structural visual inspection using region-based deep learning for detecting multiple damage types. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 731–747. [Google Scholar] [CrossRef]
- Hung, D.V.; Hung, H.M.; Anh, P.H.; Thang, N.T. Structural damage detection using hybrid deep learning algorithm. J. Sci. Technol. Civ. Eng. STCE-NUCE 2020, 14, 53–64. [Google Scholar] [CrossRef] [Green Version]
- Atha, D.J.; Jahanshahi, M.R. Evaluation of deep learning approaches based on convolutional neural networks for corrosion detection. Struct. Health Monit. 2018, 17, 1110–1128. [Google Scholar] [CrossRef]
- Sony, S.; Gamage, S.; Sadhu, A.; Samarabandu, J. Vibration-Based Multiclass Damage Detection and Localization Using Long Short-Term Memory Networks. In Structures; Elsevier: Amsterdam, The Netherlands, 2022; Volume 35, pp. 436–451. [Google Scholar]
- Chen, C.; Seo, H.; Zhao, Y. A novel pavement transverse cracks detection model using WT-CNN and STFT-CNN for smartphone data analysis. Int. J. Pavement Eng. 2021, 1–13. [Google Scholar] [CrossRef]
- Chalapathy, R.; Menon, A.K.; Chawla, S. Robust, deep and inductive anomaly detection. In Joint European Conference on Machine Learning and Knowledge Discovery in Databases; Springer: Cham, Switzerland, 2017; pp. 36–51. [Google Scholar]
- Ma, X.; Lin, Y.; Nie, Z.; Ma, H. Structural damage identification based on unsupervised feature-extraction via Variational Auto-encoder. Measurement 2020, 160, 107811. [Google Scholar] [CrossRef]
- Lee, K.; Jeong, S.; Sim, S.; Shin, D.H. Field experiment on a PSC-I bridge for convolutional autoencoder-based damage detection. Struct. Health Monit. 2021, 20, 1627–1643. [Google Scholar] [CrossRef]
- Wang, Z.; Cha, Y. Automated damage-sensitive feature extraction using unsupervised convolutional neural networks. In Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems; International Society for Optics and Photonics: Denver, CO, USA, 2018; p. 105981J. [Google Scholar]
- Cha, Y.; Wang, Z. Unsupervised novelty detection–based structural damage localization using a density peaks-based fast clustering algorithm. Struct. Health Monit. 2018, 17, 313–324. [Google Scholar] [CrossRef]
- Wang, Z.; Cha, Y. Unsupervised deep learning approach using a deep auto-encoder with a one-class support vector machine to detect damage. Struct. Health Monit. 2021, 20, 406–425. [Google Scholar] [CrossRef]
- Kingma, D.P.; Welling, M. Auto-encoding variational bayes. arXiv 2013, arXiv:1312.6114. [Google Scholar]
- Xu, H.; Chen, W.; Zhao, N.; Li, Z.; Bu, J.; Li, Z.; Liu, Y.; Zhao, Y.; Pei, D.; Feng, Y. Unsupervised anomaly detection via variational auto-encoder for seasonal kpis in web applications. In Proceedings of the 2018 World Wide Web Conference, Geneva, Switzerland, 23–27 April 2018; pp. 187–196. [Google Scholar]
- Jia, H.; Zhang, Z.; Liu, H.; Dai, F.; Liu, Y.; Leng, J. An approach based on expectation-maximization algorithm for parameter estimation of Lamb wave signals. Mech. Syst. Signal Pr. 2019, 120, 341–355. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Parameters | Value |
|---|---|---|
| Sand | Depth (m) | 0.9 |
| Density () | 1510 | |
| Tunnel | External diameter (m) | 0.3 |
| Length (m) | 3 | |
| Depth of tunnel (m) | 0.2 | |
| Ring width (m) | 0.1 | |
| Lining thickness (m) | 0.01 | |
| Density of photosensitive resin () | 1150 | |
| Tensile modulus (MPa) | 2779 | |
| Poisson’s ratio | 0.42 | |
| Sandbox | Length × width × height (m) | 3 × 1.5 × 1 |
| Polystyrene foam board | Thickness (m) | 0.25 |
| Vehicle | Length × width × height (m) | 0.3 × 0.15 × 0.12 |
| Speed () | 0.9 | |
| Weight (kg) | 5.08 | |
| Track | Length × width × height (m) | 3 × 0.004 × 0.004 |
| Sensor | Length × width × height (m) | 0.04 × 0.04 × 0.05 |
| Measuring range (g) | 2 | |
| Sampling frequency (Hz) | 4000 | |
| Weight (kg) | 0.136 | |
| Resolution (μg) | 0.2 |
| Case | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| Void/cm3 | - | 166.4 | 331.7 | 447 | 566 |
| Datasets | Condition | Case | Number of Testing Sets |
|---|---|---|---|
| Training | Healthy | 0 | 1280 |
| Validation | Healthy | 0 | 320 |
| Test | Healthy | 0 | 400 |
| Voids | 1 | 100 | |
| Voids | 2 | 100 | |
| Voids | 3 | 100 | |
| Voids | 4 | 100 |
| Blocks | Layers | Parameters | Output |
|---|---|---|---|
| Encoder | Input | 1@18 × 96 | 1@18 × 96 |
| Conv2D | 32@3 × 3 | 32@18 × 96 | |
| Conv2D | 32@3 × 3 | 32@18 × 96 | |
| MaxPooling | 3 × 3 | 3 × 3 | |
| Conv2D | 16@3 × 3 | 16@6 × 32 | |
| Parameter resampling | σ (Conv2D) | 4@3 × 3 | 4@6 × 32 |
| μ (Conv2D) | 4@3 × 3 | 4@6 × 32 | |
| Hidden = μ + σ × ε | σε = 0.01 | σε = 0.01 | |
| Decoder | Conv2D | 16@3 × 3 | 16@6 × 32 |
| UpSampling | 3 × 3 | 3 × 3 | |
| Conv2D | 4@3 × 3 | 4@18 × 96 | |
| Conv2D | 4@3 × 3 | 4@18 × 96 | |
| Output (Conv2D) | 1@3 × 3 | 1@18 × 96 | |
| Regularization | L2 (1 × 10−6) | ||
| Optimizer | Nadam | ||
| Batchs | 24 | ||
| Epochs | 150 |
| Sample Number | Prediction | ||
|---|---|---|---|
| Normal | Void | ||
| Ground truth | Normal | True normal (TN) | False hit (FH) |
| Void | False normal (FN) | True hit (TH) | |
| Data Decomposition Methods in Preprocessing | Machine Learning Methods | Recall Rate | Hit Rate | Accuracy |
|---|---|---|---|---|
| WPD | CVAE | 96.25 | 86.75 | 91.5 |
| VMD | CVAE | 92.75 | 84.25 | 89 |
| CVAE | 88.75 | 81.5 | 85.13 | |
| WPD | VAE | 90.5 | 82.25 | 86.38 |
| WPD | CAE | 85.25 | 80.75 | 83 |
| WPD | K-means | 78 | 78.75 | 78.38 |
| WPD | GMM | 82.25 | 79.5 | 80.88 |
| Noise Power (dBW) | WPD-CVAE | VMD-CVAE | ||||
|---|---|---|---|---|---|---|
| Recall Rate | Hit Rate | Accuracy | Recall Rate | Hit Rate | Accuracy | |
| 0 | 95.75 | 84.5 | 90.13 | 91.5 | 83 | 87.25 |
| 10 | 95.25 | 83.25 | 89.25 | 90.75 | 81.75 | 86.25 |
| 20 | 93.75 | 82.75 | 88.25 | 89.5 | 80.5 | 85 |
| 30 | 92.25 | 82 | 87.13 | 88 | 79.25 | 83.63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Xie, X.; Li, H.; Zhou, B. An Unsupervised Tunnel Damage Identification Method Based on Convolutional Variational Auto-Encoder and Wavelet Packet Analysis. Sensors 2022, 22, 2412. https://doi.org/10.3390/s22062412
Zhang Y, Xie X, Li H, Zhou B. An Unsupervised Tunnel Damage Identification Method Based on Convolutional Variational Auto-Encoder and Wavelet Packet Analysis. Sensors. 2022; 22(6):2412. https://doi.org/10.3390/s22062412
Chicago/Turabian StyleZhang, Yonglai, Xiongyao Xie, Hongqiao Li, and Biao Zhou. 2022. "An Unsupervised Tunnel Damage Identification Method Based on Convolutional Variational Auto-Encoder and Wavelet Packet Analysis" Sensors 22, no. 6: 2412. https://doi.org/10.3390/s22062412