

Evaluation of a CNN-Based Modular Precision Sprayer in Broadcast-Seeded Field

Abstract
:1. Introduction
2. Materials and Methods
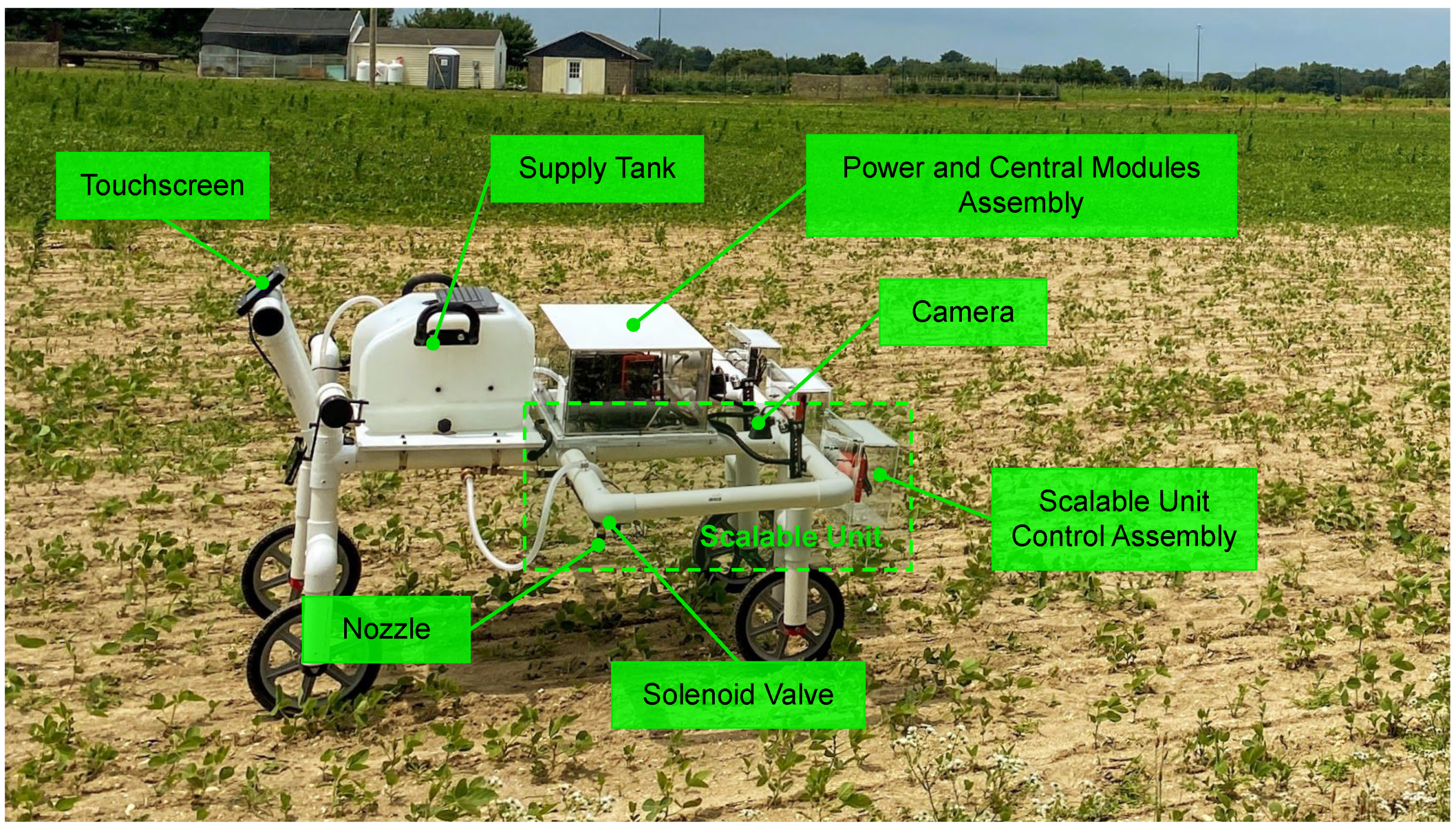
2.1. Precision Sprayer
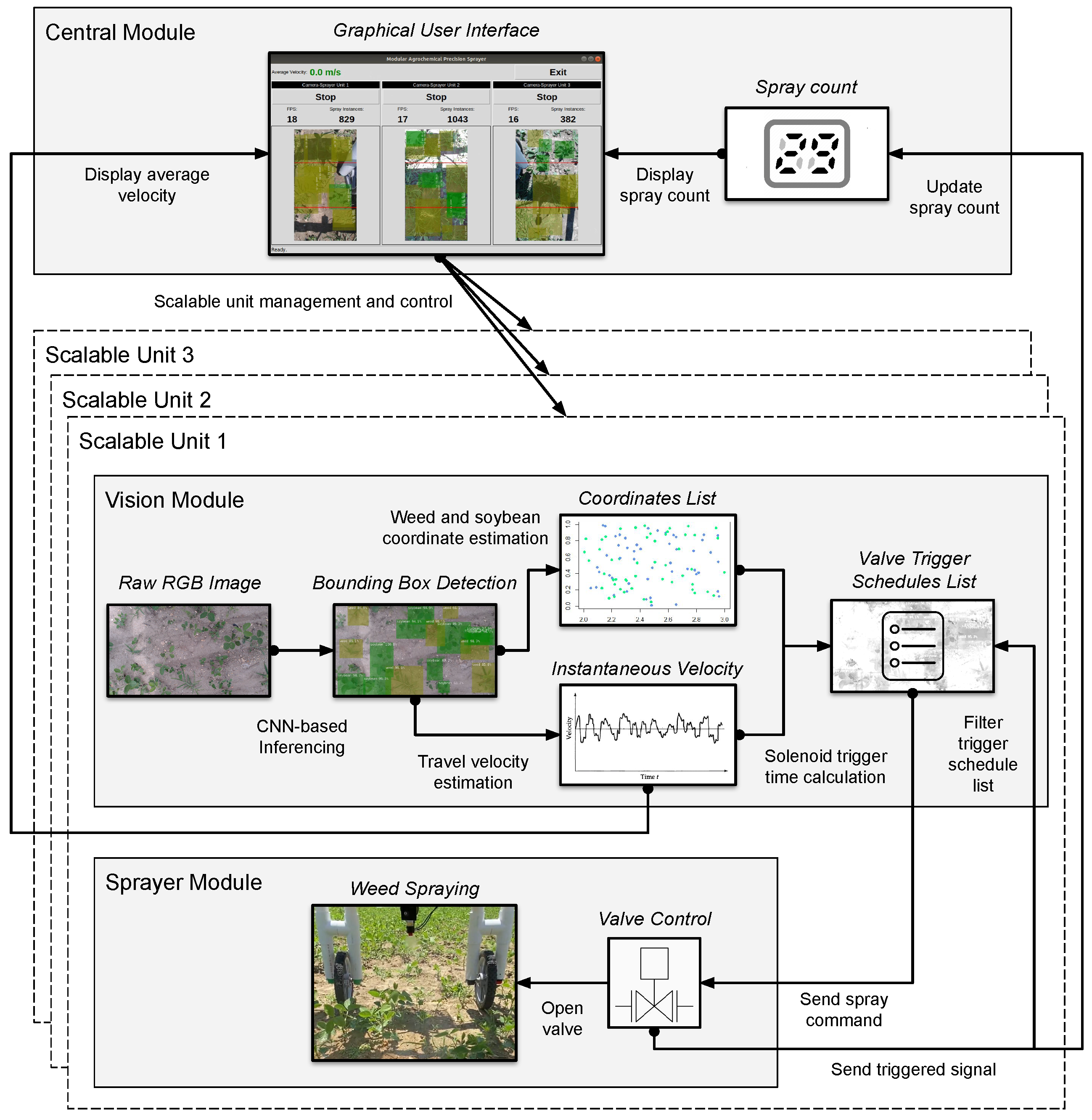
- The sprayer utilized a modular hardware and software architecture, making the design scalable and reconfigurable. The manually pushed prototype in the test was limited to three modules with the consideration of human power. The same design can be easily expanded to unlimited modules as long as the power and maneuverability are allowed by the prime mover, such as a tractor or unmanned vehicle.
- The vision modules used the virtual crop and weed detection bounding box to estimate the travel velocity in a local coordinate system. In this “what you see is what you detect” approach, the vision module can combine plant detection and velocity estimation. It can also easily correct any error with real-time feedback from the incoming video streams. Compared with wheel encoders [10] or global positioning systems with real-time kinematics [25], the vision module could be potentially more accurate, faster to obtain feedback, and more capable to accommodate uneven terrain.
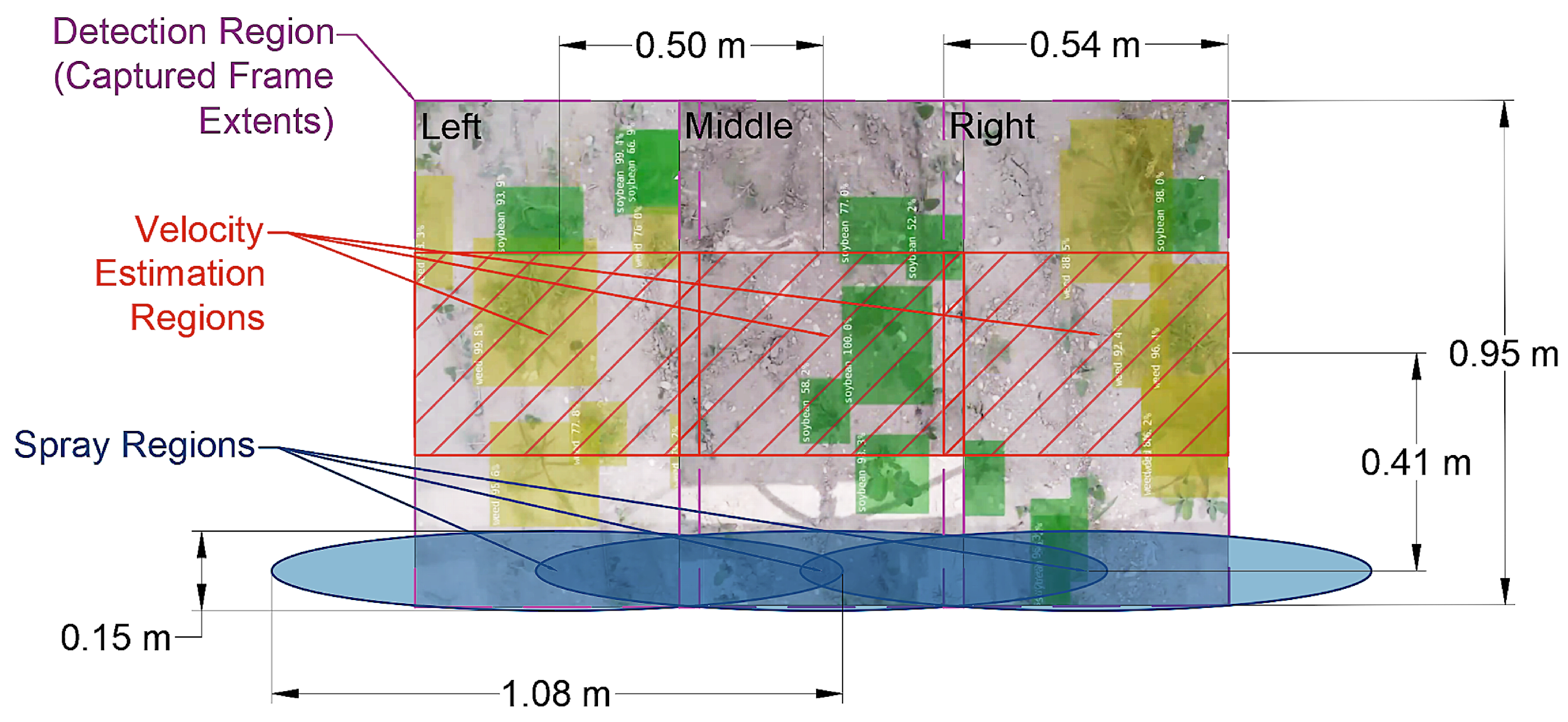
- The effective spray regions covered by the nozzles were positioned away from the velocity estimation region, as illustrated in Figure 3. This approach will decrease the need for computing power while increasing the permissible time delay between detection and spraying to allow for a higher sprayer moving speed than when the detection, velocity estimation, and sprayer regions coincide.
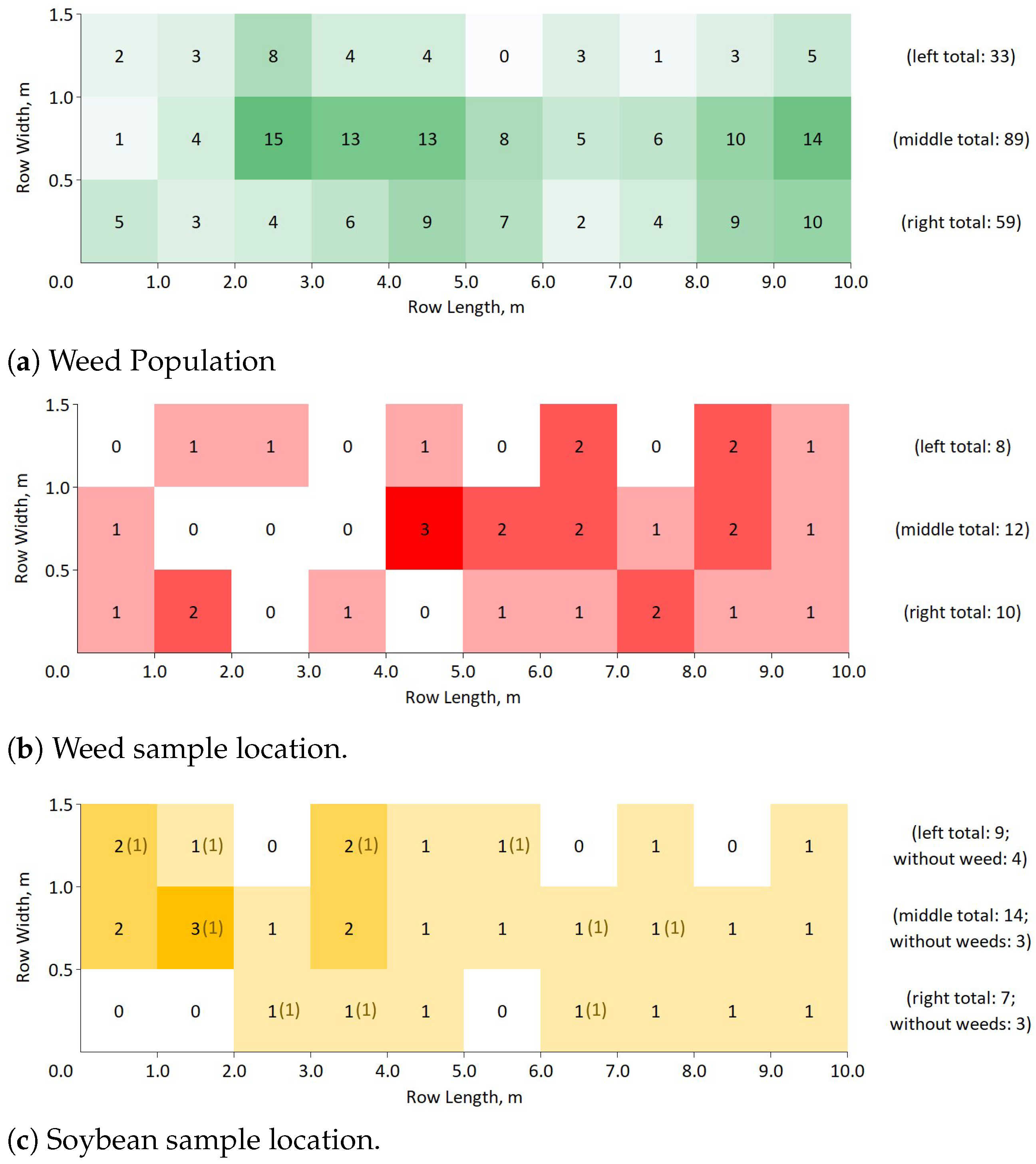
2.2. Experimental Field
2.3. SSD-MobileNetV1 Training and Validation
2.4. Field Testing
2.4.1. Targeting Performance
2.4.2. Spray Volume Reduction
3. Results and Discussion
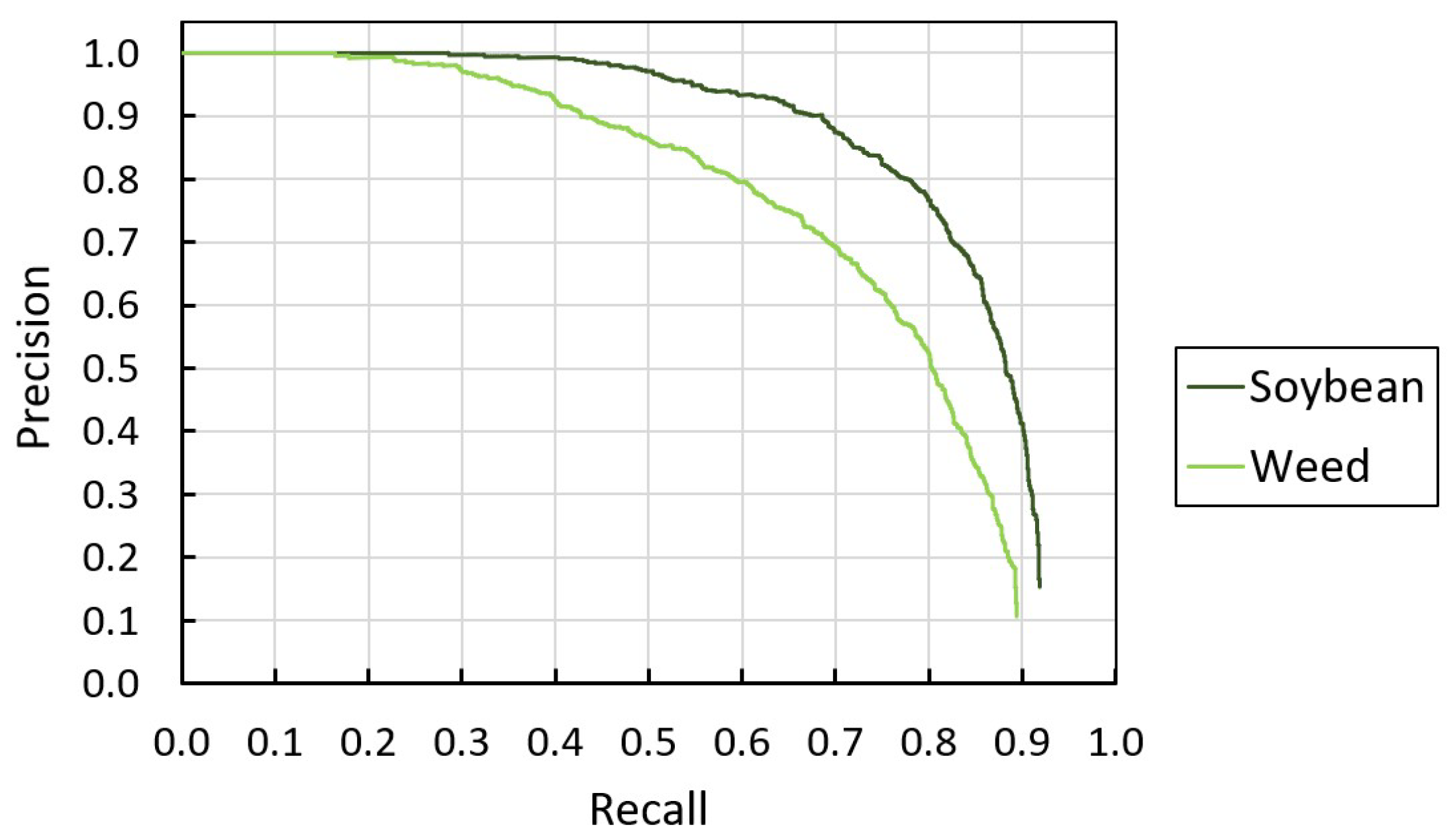
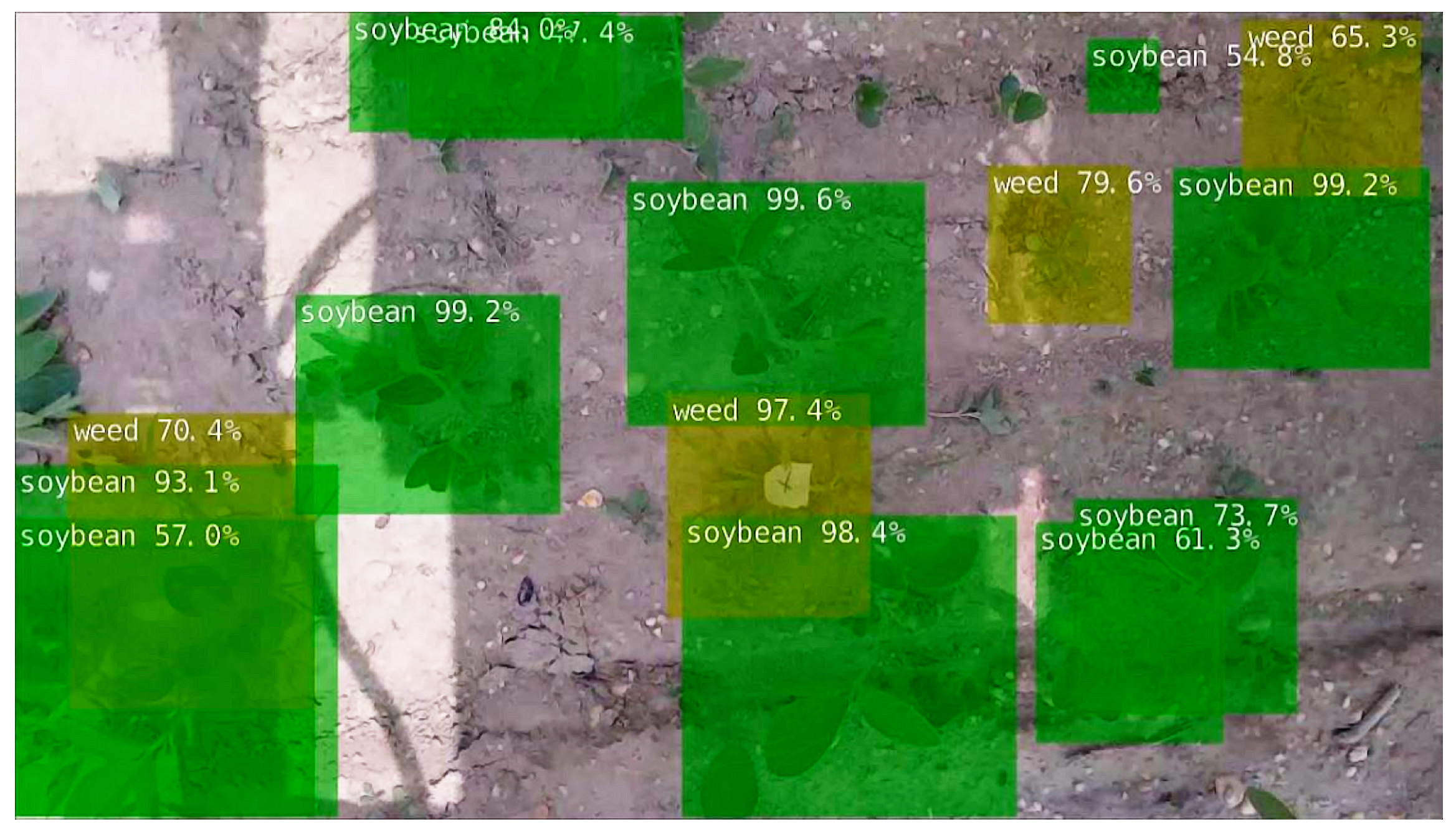
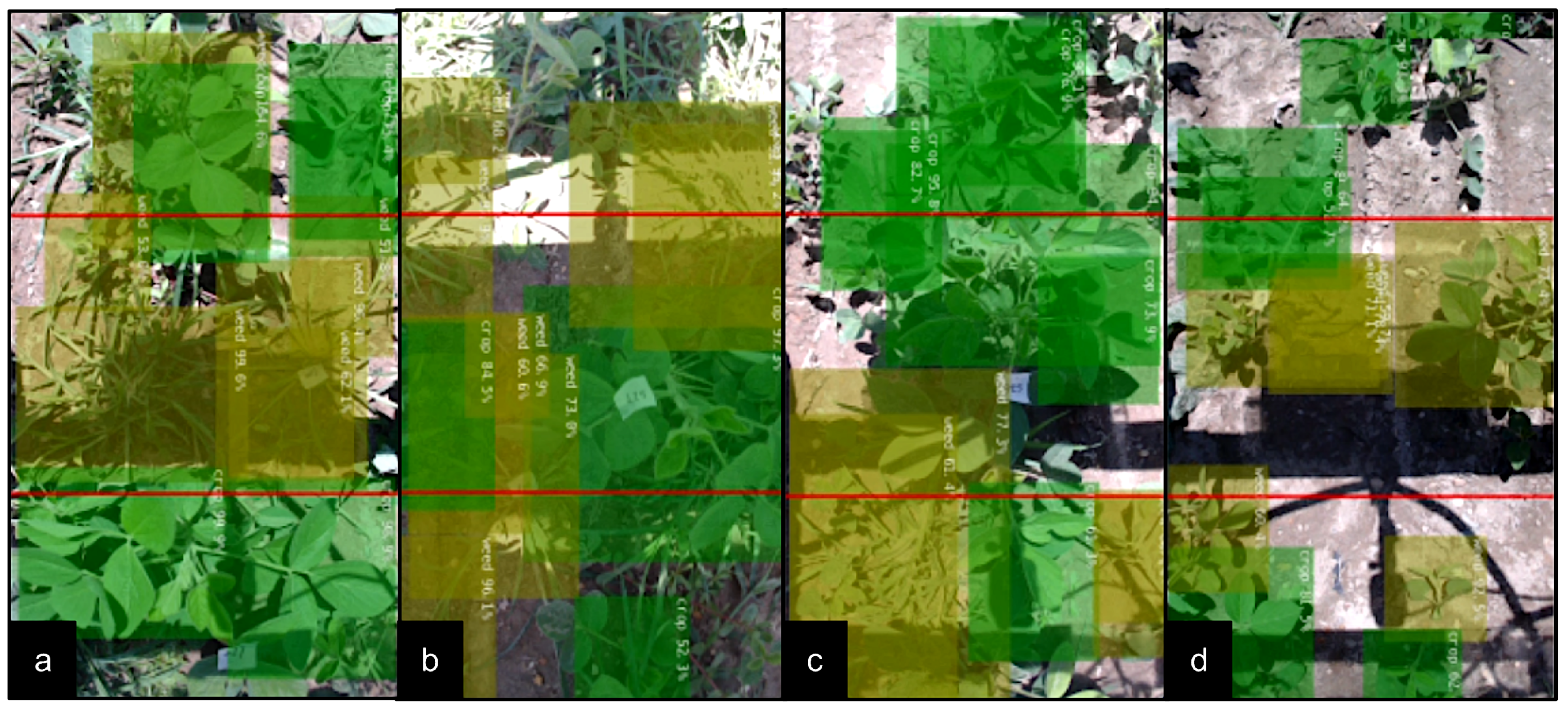
3.1. CNN Model Performance
3.2. Targeting Performance
3.3. Spray Volume Reduction
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Voora, V.; Larrea, C.; Bermudez, S. Global Market Report: Soybeans; Technical Report; International Institute for Sustainable Development (IISD): Winnipeg, MB, Canada, 2020. [Google Scholar]
- Ene, C.; Anyim, A.; Chukwudi, U.; Okechukwu, E.; Ikeogu, U. Growth and Yield Response of Selected Improved Soybean (Glycine max [L.] Merrill) Varieties to Varying Weeding Regimes Under a Tropical Condition. J. Cent. Eur. Agric. 2019, 20, 157–178. [Google Scholar] [CrossRef]
- Mohammed, Y.A.; Matthees, H.L.; Gesch, R.W.; Patel, S.; Forcella, F.; Aasand, K.; Steffl, N.; Johnson, B.L.; Wells, M.S.; Lenssen, A.W. Establishing winter annual cover crops by interseeding into Maize and Soybean. Agron. J. 2020, 112, 719–732. [Google Scholar] [CrossRef] [Green Version]
- Singh, G.; Thilakarathne, A.D.G.M.; Williard, K.W.J.; Schoonover, J.E.; Cook, R.L.; Gage, K.L.; McElroy, R. Tillage and legume non-legume cover cropping effects on corn–soybean production. Agron. J. 2020, 112, 2636–2648. [Google Scholar] [CrossRef]
- Whaley, R.; Uddin, K. The Effects of Different Planting Methods on Kharif Soybean [Bangladesh]; Technical Report; Bangladesh Agricultural Research Institute-Agronomy Research: Gazipur, Bangladesh, 1981. [Google Scholar]
- Vandeplas, I.; Vanlauwe, B.; Driessens, L.; Merckx, R.; Deckers, J. Reducing labour and input costs in soybean production by smallholder farmers in south-western Kenya. Field Crops Res. 2010, 117, 70–80. [Google Scholar] [CrossRef]
- Clapp, J. Explaining Growing Glyphosate Use: The Political Economy of Herbicide-Dependent Agriculture. Glob. Environ. Change 2021, 67, 102239. [Google Scholar] [CrossRef]
- Bruggen, A.V.; He, M.; Shin, K.; Mai, V.; Jeong, K.; Finckh, M.; Morris, J. Environmental and health effects of the herbicide glyphosate. Sci. Total Environ. 2018, 616–617, 255–268. [Google Scholar] [CrossRef]
- Swinton, S.M.; Deynze, B.V. Hoes to Herbicides: Economics of Evolving Weed Management in the United States. Eur. J. Dev. Res. 2017, 29, 560–574. [Google Scholar] [CrossRef]
- Utstumo, T.; Urdal, F.; Brevik, A.; Dørum, J.; Netland, J.; Overskeid, Ø.; Berge, T.W.; Gravdahl, J.T. Robotic in-row weed control in vegetables. Comput. Electron. Agric. 2018, 154, 36–45. [Google Scholar] [CrossRef]
- Schryver, M.G.; Soltani, N.; Hooker, D.C.; Robinson, D.E.; Tranel, P.J.; Sikkema, P.H. Control of Glyphosate-Resistant Common waterhemp (Amaranthus rudis) in Three New Herbicide-Resistant Soybean Varieties in Ontario. Weed Technol. 2017, 31, 828–837. [Google Scholar] [CrossRef]
- Ferreira, P.H.U.; Ferguson, J.C.; Reynolds, D.B.; Kruger, G.R.; Irby, J.T. Droplet size and physicochemical property effects on herbicide efficacy of pre-emergence herbicides in soybean (Glycine max (L.) Merr). Pest Manag. Sci. 2020, 76, 737–746. [Google Scholar] [CrossRef]
- Calegari, F.; Tassi, D.; Vincini, M. Economic and environmental benefits of using a spray control system for the distribution of pesticides. J. Agric. Eng. 2013, 44. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, W.; Wei, X. A review on weed detection using ground-based machine vision and image processing techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
- Tian, L.; Reid, J.; Hummel, J. Development of a Precision Sprayer for Site-Specific Weed Management. Trans. ASAE 1999, 42, 893–900. [Google Scholar] [CrossRef]
- Zanin, A.R.A.; Neves, D.C.; Teodoro, L.P.R.; da Silva, C.A., Jr.; da Silva, S.P.; Teodoro, P.E.; Baio, F.H.R. Reduction of pesticide application via real-time precision spraying. Sci. Rep. 2022, 12, 5638. [Google Scholar] [CrossRef] [PubMed]
- Peteinatos, G.G.; Weis, M.; Andújar, D.; Ayala, V.R.; Gerhards, R. Potential use of ground-based sensor technologies for weed detection. Pest Manag. Sci. 2014, 70, 190–199. [Google Scholar] [CrossRef] [PubMed]
- Scotford, I.; Miller, P. Applications of Spectral Reflectance Techniques in Northern European Cereal Production: A Review. Biosyst. Eng. 2005, 90, 235–250. [Google Scholar] [CrossRef]
- Dammer, K.H. Real-time variable-rate herbicide application for weed control in carrots. Weed Res. 2016, 56, 237–246. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, Y.; Gong, C.; Chen, Y.; Yu, H. Applications of Deep Learning for Dense Scenes Analysis in Agriculture: A Review. Sensors 2020, 20, 1520. [Google Scholar] [CrossRef] [Green Version]
- Sivakumar, A.N.V.; Li, J.; Scott, S.; Psota, E.; Jhala, A.J.; Luck, J.D.; Shi, Y. Comparison of object detection and patch-based classification deep learning models on mid-to late-season weed detection in UAV imagery. Remote. Sens. 2020, 12, 2136. [Google Scholar] [CrossRef]
- Ferreira, A.D.S.; Freitas, D.M.; da Silva, G.G.; Pistori, H.; Folhes, M.T. Weed detection in soybean crops using ConvNets. Comput. Electron. Agric. 2017, 143, 314–324. [Google Scholar] [CrossRef]
- Sabóia, H.D.S.; Mion, R.L.; de O. Silveira, A.; Mamiya, A.A. Real-Time Selective Spraying for Viola Rope Control in Soybean and Cotton Crops Using Deep Learning. Eng. Agric. 2022, 42. [Google Scholar] [CrossRef]
- Farooque, A.A.; Hussain, N.; Schumann, A.W.; Abbas, F.; Afzaal, H.; McKenzie-Gopsill, A.; Esau, T.; Zaman, Q.; Wang, X. Field evaluation of a deep learning-based smart variable-rate sprayer for targeted application of agrochemicals. Smart Agric. Technol. 2023, 3, 100073. [Google Scholar] [CrossRef]
- Partel, V.; Kakarla, S.C.; Ampatzidis, Y. Development and evaluation of a low-cost and smart technology for precision weed management utilizing artificial intelligence. Comput. Electron. Agric. 2019, 157, 339–350. [Google Scholar] [CrossRef]
- Liu, J.; Abbas, I.; Noor, R.S. Development of Deep Learning-Based Variable Rate Agrochemical Spraying System for Targeted Weeds Control in Strawberry Crop. Agronomy 2021, 11, 1480. [Google Scholar] [CrossRef]
- Ruigrok, T.; van Henten, E.; Booij, J.; van Boheemen, K.; Kootstra, G. Application-Specific Evaluation of a Weed-Detection Algorithm for Plant-Specific Spraying. Sensors 2020, 20, 7262. [Google Scholar] [CrossRef]
- Sanchez, P.R.; Zhang, H. Simulation-Aided Development of a CNN-Based Vision Module for Plant Detection: Effect of Travel Velocity, Inferencing Speed, and Camera Configurations. Appl. Sci. 2022, 12, 1260. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. ECCV 2016, 9905, 21–37. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. arXiv 2015, arXiv:1506.02640. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Winoto, A.S.; Kristianus, M.; Premachandra, C. Small and Slim Deep Convolutional Neural Network for Mobile Device. IEEE Access 2020, 8, 125210–125222. [Google Scholar] [CrossRef]
- Baozhou, Z.; Al-Ars, Z.; Hofstee, H.P. REAF: Reducing Approximation of Channels by Reducing Feature Reuse Within Convolution. IEEE Access 2020, 8, 169957–169965. [Google Scholar] [CrossRef]
- Liu, Z.; Ding, D. TensorRT acceleration based on deep learning OFDM channel compensation. J. Phys. Conf. Ser. 2022, 2303, 012047. [Google Scholar] [CrossRef]
- Tzutalin. LabelImg. 2015. Available online: https://github.com/tzutalin/labelImg (accessed on 25 June 2022).
- Dusty-NV. SSD-Based Object Detection in Pytorch. 2021. Available online: https://github.com/dusty-nv/pytorch-ssd (accessed on 28 June 2022).
- ASABE Standards. ASAE EP367.2 MAR1991 (R2017): Guide for Preparing Field Sprayer Calibration Procedures; American Society of Biological Engineers: St. Joseph, MI, USA, 2017. [Google Scholar]
- Sanchez, P.R.; Zhang, H.; Ho, S.S.; Padua, E.D. Comparison of One-Stage Object Detection Models for Weed Detection in Mulched Onions. In Proceedings of the 2021 IEEE International Conference on Imaging Systems and Techniques (IST), Kaohsiung, Taiwan, 24–26 August 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Tian, L. Development of a sensor-based precision herbicide application system. Comput. Electron. Agric. 2002, 36, 133–149. [Google Scholar] [CrossRef]
- Datta, A.; Ullah, H.; Tursun, N.; Pornprom, T.; Knezevic, S.Z.; Chauhan, B.S. Managing Weeds Using Crop Competition in Soybean [Glycine max (L.) Merr.]. Crop Prot. 2017, 95, 60–68. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value | Unit |
|---|---|---|
| Fluid Pressure | 550 | kPa |
| Nozzle Delivery Rate | 1.6 | L/min |
| Nozzle Spraying Time | 0.2 | s |
| Nozzle Spray Pattern Width | 1.08 | m |
| Nozzle Height | 0.45 | m |
| Nozzle Spacing | 0.5 | m |
| Effective Spray Width @ 50% Overlap | 2.08 | m |
| Max. Operating Ground Speed | 3.54 | m/s |
| Max. Theoretical Field Capacity | 2.65 | ha/h |
| Camera Resolution | 1280 × 720 | px |
| Average Inference Speed | 19 | fps |
| Power Consumption | 160 | W |
| Min. Operating Time | 1.85 | h |
| Class | , % | , % | Inference Speed , fps |
|---|---|---|---|
| Soybean | 81.4 | 76.0 | 19.0 |
| Weed | 70.6 |
| Trial | , % | , % | , % | , % | |||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 30 | 7 | 23 | 0 | 10 | 56.66 | 100.00 | 76.67 | 70.00 |
| 2 | 30 | 7 | 23 | 0 | 10 | 56.66 | 100.00 | 76.67 | 70.00 |
| 3 | 30 | 9 | 21 | 0 | 10 | 58.82 | 100.00 | 70.00 | 90.00 |
| Average | 30 | 7.67 | 22.33 | 0 | 10 | 57.32 | 100.00 | 74.44 | 76.67 |
| Row | , L | , % | |||
|---|---|---|---|---|---|
| Left | 33 | 38.33 | 1.16 | 0.204 | 48.89 |
| Middle | 89 | 57.33 | 0.64 | 0.306 | 23.56 |
| Right | 59 | 41.67 | 0.71 | 0.222 | 44.44 |
| All | 181 | 137.33 | 0.76 | 0.732 | 38.96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanchez, P.R.; Zhang, H. Evaluation of a CNN-Based Modular Precision Sprayer in Broadcast-Seeded Field. Sensors 2022, 22, 9723. https://doi.org/10.3390/s22249723
Sanchez PR, Zhang H. Evaluation of a CNN-Based Modular Precision Sprayer in Broadcast-Seeded Field. Sensors. 2022; 22(24):9723. https://doi.org/10.3390/s22249723
Chicago/Turabian StyleSanchez, Paolo Rommel, and Hong Zhang. 2022. "Evaluation of a CNN-Based Modular Precision Sprayer in Broadcast-Seeded Field" Sensors 22, no. 24: 9723. https://doi.org/10.3390/s22249723