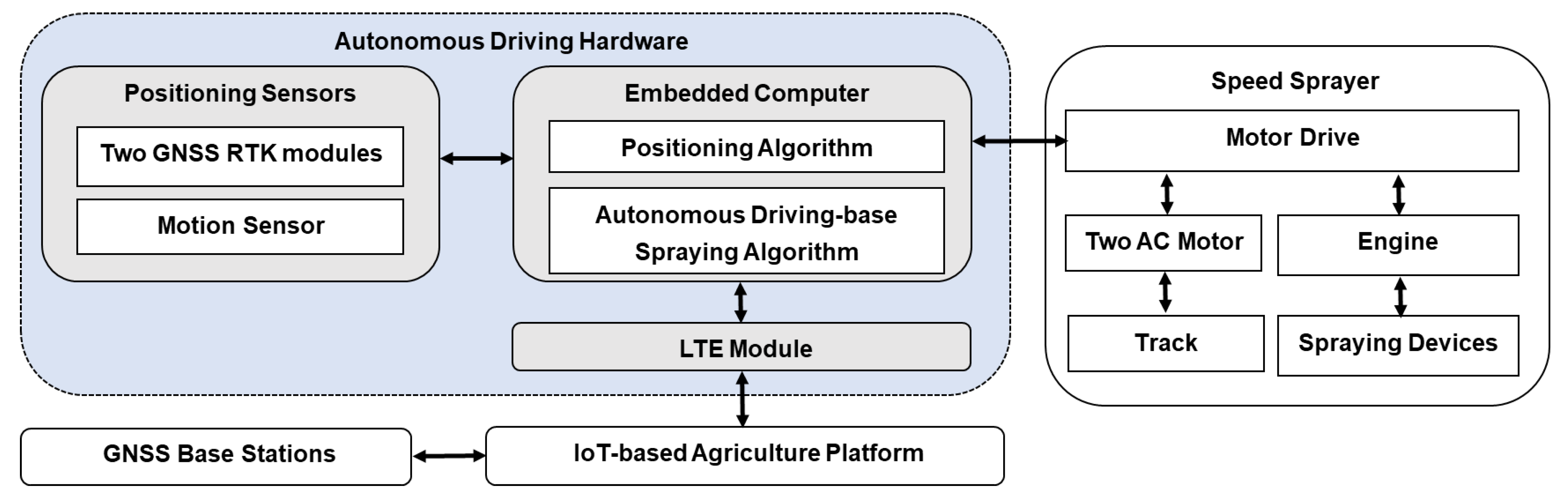
2.1. Overall Architectural Design of the Autonomous Driving-Based Spraying Work System
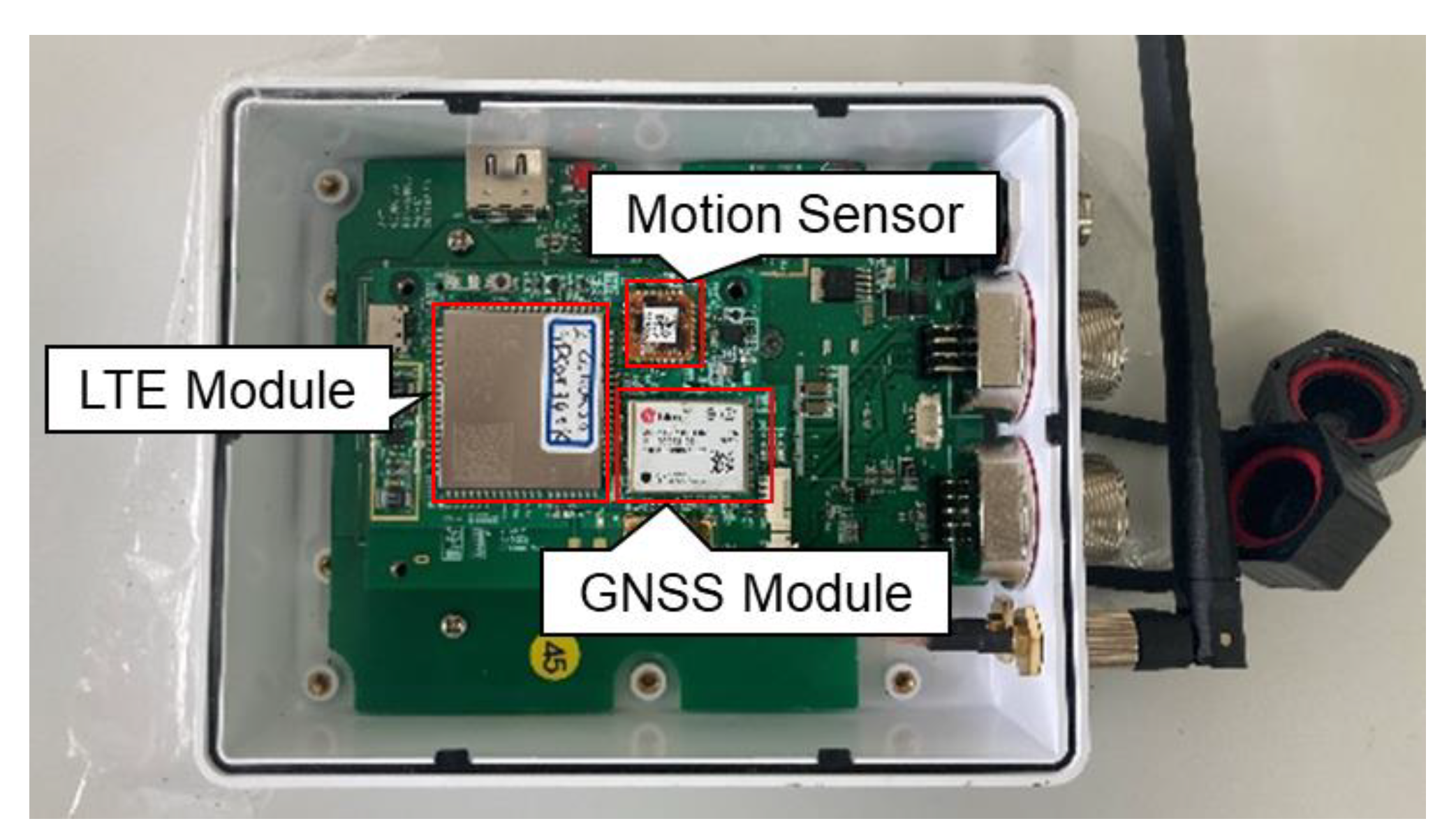
The overall architectural design of the autonomous driving-based speed sprayer system consists of five parts: autonomous driving hardware, a speed sprayer, an IoT-based agriculture platform and GNSS base stations, as shown in
Figure 1. The autonomous driving hardware part is composed of positioning sensors, an embedded computer and an LTE (long-term evolution) module. Positioning sensors are included in the two GNSS modules and a motion sensor, which are used to calculate real-time navigation information, such as the position, velocity and attitude of the speed sprayer. The embedded computer is loaded with core algorithms required to operate the autonomous driving-based sprayer, including a positioning algorithm and an autonomous driving-based spraying algorithm. The role of the positioning algorithm is to calculate and provide navigation information using positioning sensor data in real-time. The autonomous driving-based spraying algorithm calculates the vehicle driving and working control parameters in order to operate the autonomous driving-based spraying. The details of the positioning algorithm and the autonomous driving-based spraying algorithm are given in
Section 2.2 and
Section 2.3, respectively.
The speed sprayer can operate autonomous driving and spraying by receiving control parameters via the autonomous driving hardware. When the control parameters including the rpm of the left and right tracks, engine rpm, spraying direction (left and/or right), and whether to use the fan are received by the motor drive in the speed sprayer, the AC (alternating current) motor and engine operate the driving and spraying, respectively. In addition, information concerning the driving and spraying operation and sensors can be transmitted from the motor drive to the embedded computer to verify their statuses in real-time. To operate the RTK, the GNSS base stations comprise an antenna, a receiver and an internet communication module. These provide RTK correction signals to the GNSS RTK modules in the autonomous driving hardware via an IoT-based agricultural platform. The IoT-based agriculture platform is used to send commands related to the functional operations of the speed sprayer, manage the GNSS base stations and autonomous driving hardware, broadcast the RTK corrections, and collect and provide monitoring information from the speed sprayer.
2.2. MB RTK/Motion Sensor-Integrated Positioning Algorithm
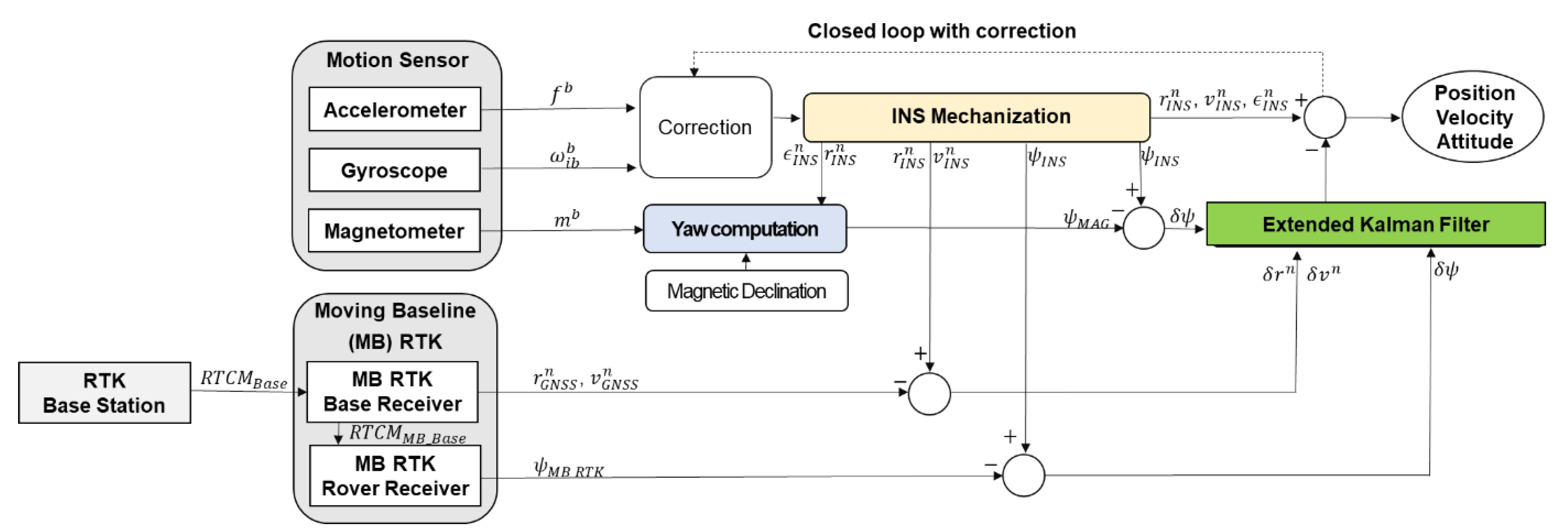
In order to perform stable autonomous driving and spraying work, it is necessary to determine the accurate and continuous position and the yaw of the speed sprayer at a high update rate in real-time. We propose a positioning algorithm based on two GNSS receivers and antennas, and a motion sensor containing a three-axis accelerometer, a three-axis gyroscope and a three-axis magnetometer. A block diagram of the MB RTK/motion sensor-integrated positioning algorithm is shown in
Figure 2.
In this study, the MB RTK/motion sensor-integrated positioning algorithm was implemented with a loosely coupled mode using an extended Kalman filter (EKF). A fifteen-state EKF was designed for the proposed algorithm, where the state vector is composed of a navigation part and a sensor part. The nine-error state vector of the navigation part is composed of position errors (
) expressed in the world geodetic system 1984 (WGS84), velocity errors (
) towards the north–east–down (NED) navigation frame and attitude errors (
). The six-error state vector of the sensor part consists of accelerometer bias (
) and gyro bias (
). The accelerometer bias and gyro bias are defined by the first-order Gauss–Markov processes. The dynamic model of the proposed algorithm is given in
where
,
,
,
,
,
,
,
, and
are system dynamic matrices, which represent the relationship between the position (
), velocity (
) and attitude (
) state errors;
is the transformation matrix from body frame to navigation frame;
is
n ×
m zero matrix;
and
are the time constant reciprocals of the first-order Gauss–Markov process model for the accelerometer and gyroscope biases, respectively;
is the error state vector;
is the error state vector of the position part consisting of latitude in units of
, longitude in units of
, and ellipsoidal height in units of m;
is the error state vector of the velocity part consisting of north, east and down velocity,
;
is the error state vector of the attitude part consisting of roll, pitch and yaw,
;
is the error state vector of accelerometer bias in the body frame,
;
is the error state vector of gyro bias in the body frame,
;
is the shaping matrix;
is the 3 × 3 identity matrix;
is the white noise vector;
is the white noises vector for the accelerometers,
;
is the white noise vector for the gyroscopes,
;
is the driving noise vector for the accelerometer biases,
; and
is the driving noise vector for the gyroscope biases,
. The full derivation and definition of the dynamic model’s elements can be found in [
9,
10].
The measurement model in EKF is generally written as
where
z is the measurement vector,
H is the design matrix,
δx is the error state vector, and
w is the measurement noise vector.
In this study, the measurement model was considered for the following three situations.
Magnetometers’ available measurements;
MB RTK base receiver’s available measurements;
MB RTK rover receiver’s available measurements.
When the magnetometers in the motion sensor measure the geomagnetic field, the yaw computation and EKF update are sequentially performed. The process of yaw computation using the magnetometers’ measurements is conducted as follows [
11]: first, to obtain the horizontal magnetic measurements, the magnetic measurements are converted into measurements in a horizontal plane using a coordinate transformation matrix taken from a sensor frame to a horizontal plane. Then, the ferrous distortion compensation is conducted by using the scale factor and offset of the measurements that had been previously estimated. Once the horizontal magnetic measurements are compensated for by using ferrous distortion, the magnetic yaw is calculated, and then the yaw based on true north is finally calculated through declination angle compensation. The measurement vector for yaw derived from the magnetometer (
) is as follows:
where
is the yaw estimated from the INS mechanization, rad;
is the yaw calculated by using the magnetometers’ measurements, rad; and
is the difference between the yaw calculated by using the magnetometers’ measurements and the yaw calculated from MB RTK, at the previous MB RTK update, rad.
The design matrix for yaw is derived from the magnetometer (
) and is expressed as
where
is the 1 × 3 zero matrix and
is the design matrix for the attitude part.
When the MB RTK base receiver provides position and velocity, and the measurement vector (
) and the design matrix (
) are as follows:
where the subscripts INS, MB_RTK, and BASE denote the value estimates from INS mechanization and the data acquisition of the MB RTK base receiver;
is the position vector consisting of latitude in units of
, longitude in units of
, and ellipsoidal height in units of m;
is the velocity vector consisting of north, east and down velocity,
;
is the 3 × 3 identity matrix; and
is the 3 × 3 zero matrix.
When the MB RTK rover receiver provides yaw and the baseline length between base and rover antenna, the difference between the baseline length calculated in MB RTK and the pre-measured baseline length is within a certain length is checked before performing a measurement update. If the difference between the baseline length calculated in the MB RTK rover receiver and the pre-measured baseline length is within a certain length, the measurement vector (
) and the design matrix (
) are as follows:
where
is the yaw estimated from the INS mechanization,
;
is the yaw provided by the MB RTK rover receiver,
;
is the 1 × 3 zero matrix; and
is the design matrix for the attitude part.
After performing the MB RTK yaw measurement update, the difference between the yaw calculated by using the magnetometers’ measurements and the yaw calculated from MB RTK is calculated as:
where
is the difference between the yaw calculated by using the magnetometers’ measurements and the yaw calculated from MB RTK,
;
is the yaw calculated by using the magnetometers’ measurement,
; and
is the yaw provided by the MB RTK rover receiver,
.
2.3. Autonomous Driving-Based Spaying Algorithm
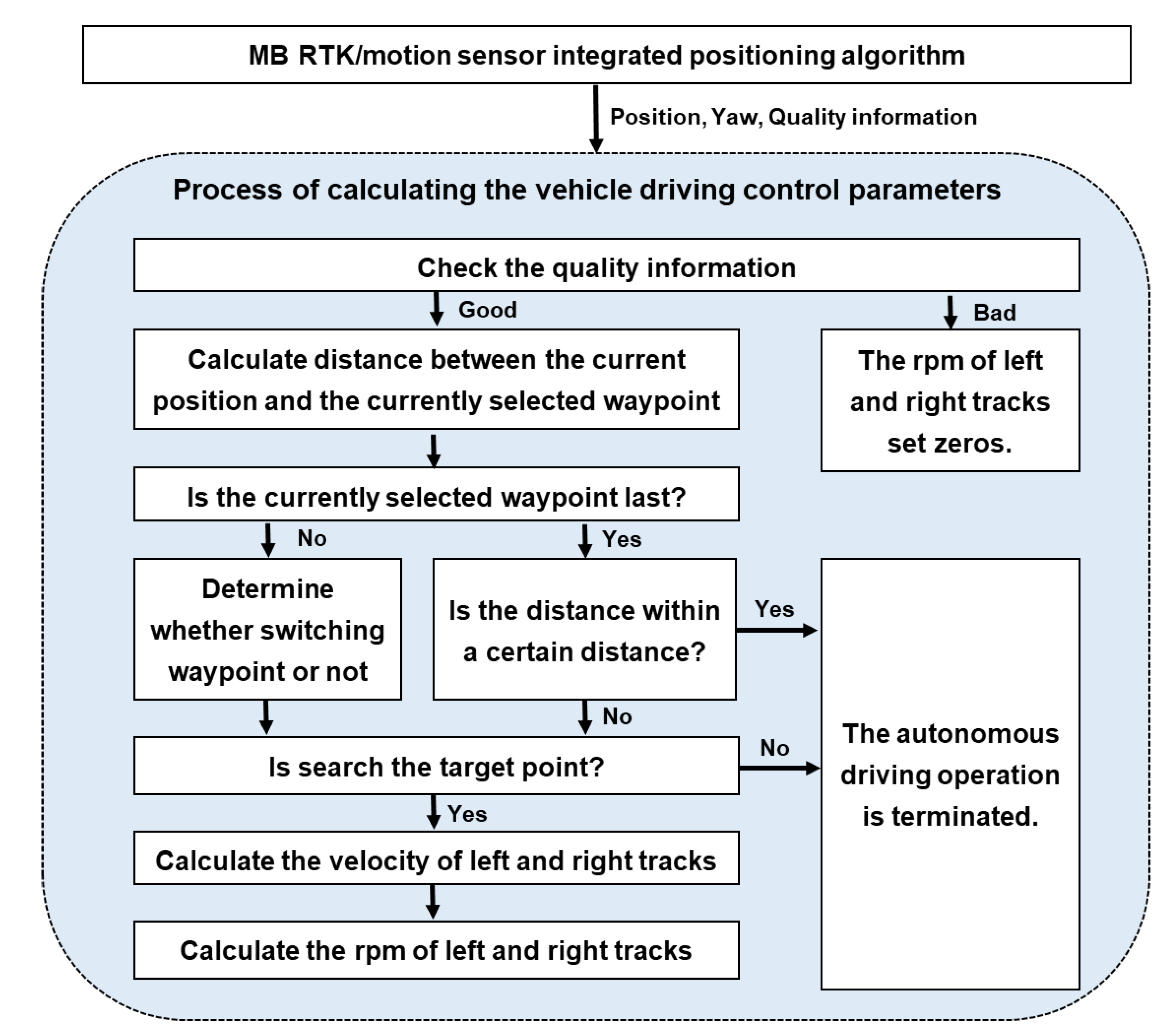
The autonomous driving-based spraying of the crawler-type speed sprayer requires the rpm of the left and right tracks as the vehicle driving control parameters, the engine rpm, the spraying direction, and whether to use the fan as the working control parameters. Therefore, the role of the autonomous driving-based spaying algorithm is to calculate vehicle driving and working control parameters using the current position and yaw based on the predefined waypoints and the spraying method data assigned to the waypoints. As shown in
Figure 3, the process of the autonomous driving-based spraying algorithm is divided into five steps.
The first step is to input and load the data of waypoints and spraying methods for the operation of the autonomous driving-based spraying algorithm. The waypoints data contain information about the autonomous driving route, including waypoint number, geodetic coordinates (latitude, longitude and ellipsoidal height), waypoint type (start point, work point, rotation point and finish point), the azimuth of a straight line created by adjacent waypoints, and angles between straight lines created by adjacent waypoints [
8]. The spraying methods data consist of a defined spraying method for each waypoint and include waypoint number, engine rpm, spraying direction (left and/or right), and whether to use the fan or not.
The second step is to prepare for the autonomous driving and the spraying before operating the autonomous driving-based sprayer. The preparation for autonomous driving begins by aligning the starting location to make sure the speed sprayer is near the starting point of the waypoints for safe autonomous driving. The user manually moves the speed sprayer until the distance between the location of the starting point and the location of the current speed sprayer location is within 0.5 m. When the autonomous driving preparation is complete, the engine rpm is raised to a predefined rpm to enable stable spraying.
When the preparation for the autonomous driving and the spraying is completed, Steps 3 to 5 of the process in the autonomous driving-based spraying algorithm are sequentially carried out using the position and yaw of the speed sprayer provided by the positioning algorithm. Steps 3 to 5 in the autonomous driving-base spraying algorithm will operate until the speed sprayer arrives at the finish point of the waypoint or deviates from the autonomous driving route.
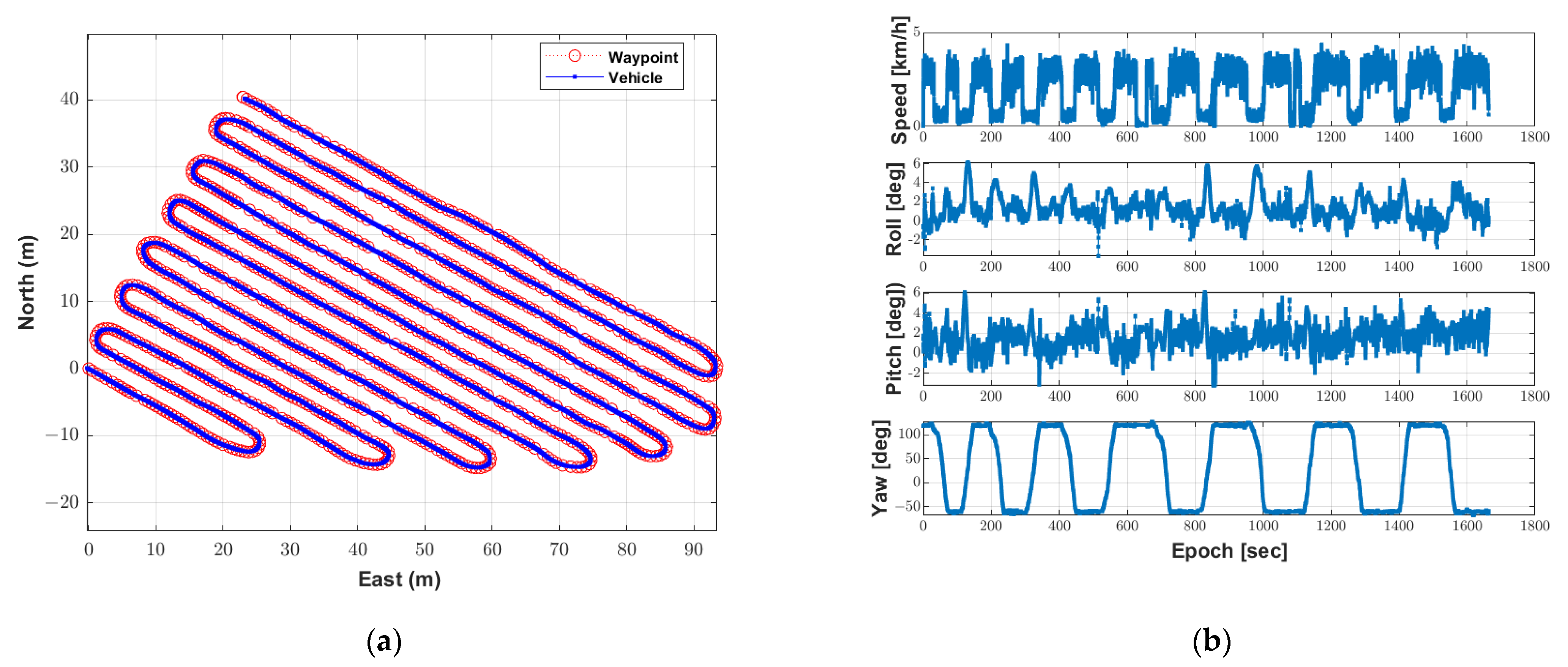
The third step is to calculate the vehicle driving control parameters (the rpm of the left and right tracks) along the desired vehicle course based on the waypoints and the speed sprayer’s current position and yaw. As shown in
Figure 4, the process for calculating the rpm of the left and right tracks as the vehicle driving control parameters are summarized as follows. First, when the MB RTK/motion sensor-integrated positioning algorithm provides position, yaw and quality information (the age of the GNSS measurement update with the resolved ambiguity and the precision of position), it determines whether or not to drive the speed sprayer, using the quality information. The conditions for quality information for autonomous driving are the age of the GNSS measurement update with a resolved ambiguity that does not exceed 2 s and the precision of position being lower than 0.5 m. Next, the distance between the current position and the currently selected waypoint is calculated, and based on this, whether to continue using the current waypoint or to switch to the next waypoint is determined. If the last waypoint is selected and the distance between the current position and the waypoint is within a certain distance, it is regarded as having arrived at the final destination and the autonomous driving operation is terminated.
If the speed sprayer does not arrive at the final destination, a target point, which is a location to be reached at the next epoch, is searched for. To search the target point, this paper applied the enclosed baseline of the sight guidance method [
12]. The enclosed baseline of the sight guidance method is used to calculate a target point as a point intersection between the straight line created between the current waypoint and the previous waypoint and within a circle with a radius enclosing the current position. If the target point cannot be calculated, it is regarded as out of the autonomous driving path and the autonomous driving is terminated. If the target point is successfully calculated, the velocity of the left and right tracks needed to reach the target point at the next epoch are calculated using the current position, yaw, and the location of the target point. Finally, the vehicle driving control parameters, the rpm of the left and right tracks, are calculated using a scale that converts the track speed into rpm. In order to calculate the vehicle driving control parameters, a detailed method and formula were described in [
7,
8].
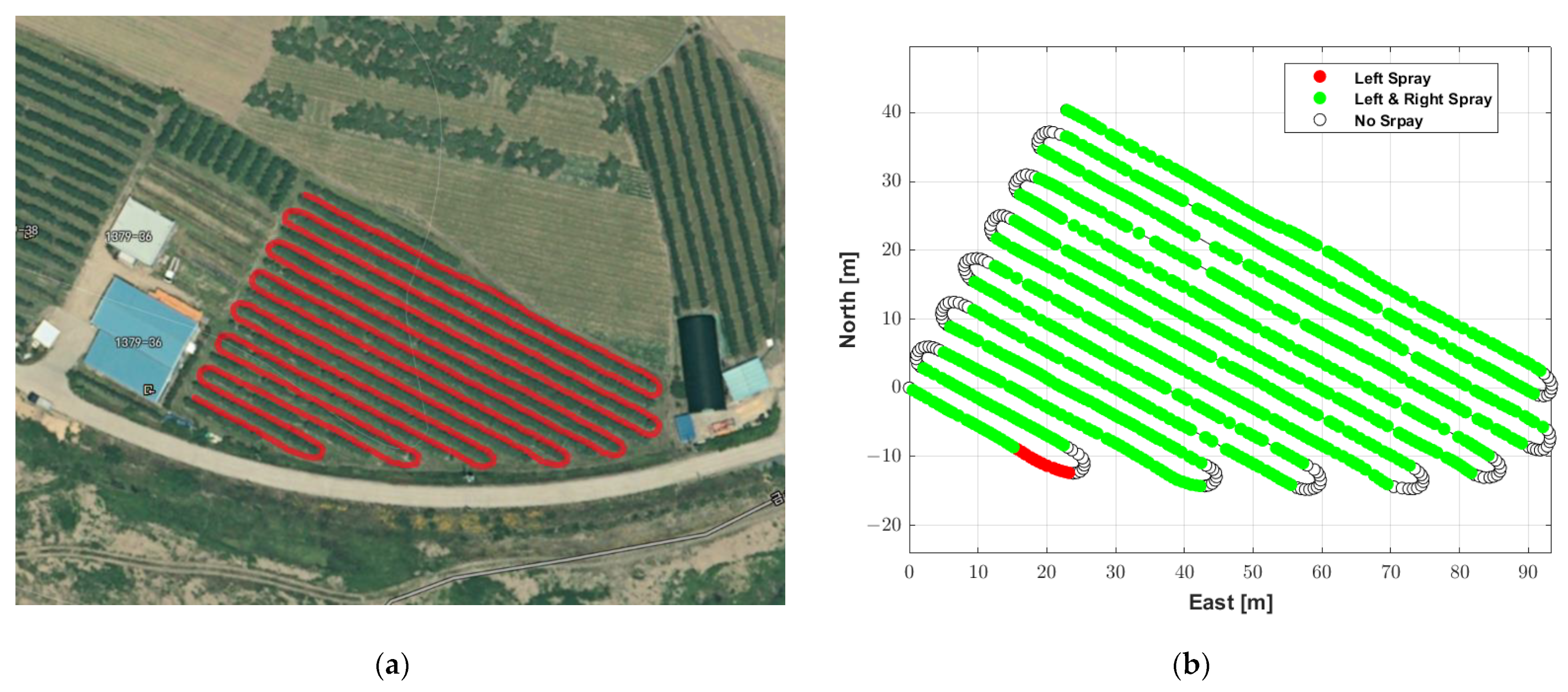
The fourth step is to choose the spraying method corresponding to the currently selected waypoint number in the data of spraying methods. If there is no spraying method for the currently selected waypoint or the autonomous driving is terminated, then the spraying control parameters (engine rpm, spraying direction and blowing) are generated for regions that have not been sprayed. In the last step, the rpm of the left and right tracks, engine rpm, spraying direction (left and/or right), and whether to use the fan are transmitted to the motor drive. In this way, the speed sprayer performs the spraying operation based on autonomous driving.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}