
An Experimental Assessment of People’s Location Efficiency Using Low-Energy Communications-Based Movement Tracking


Abstract
:1. Introduction
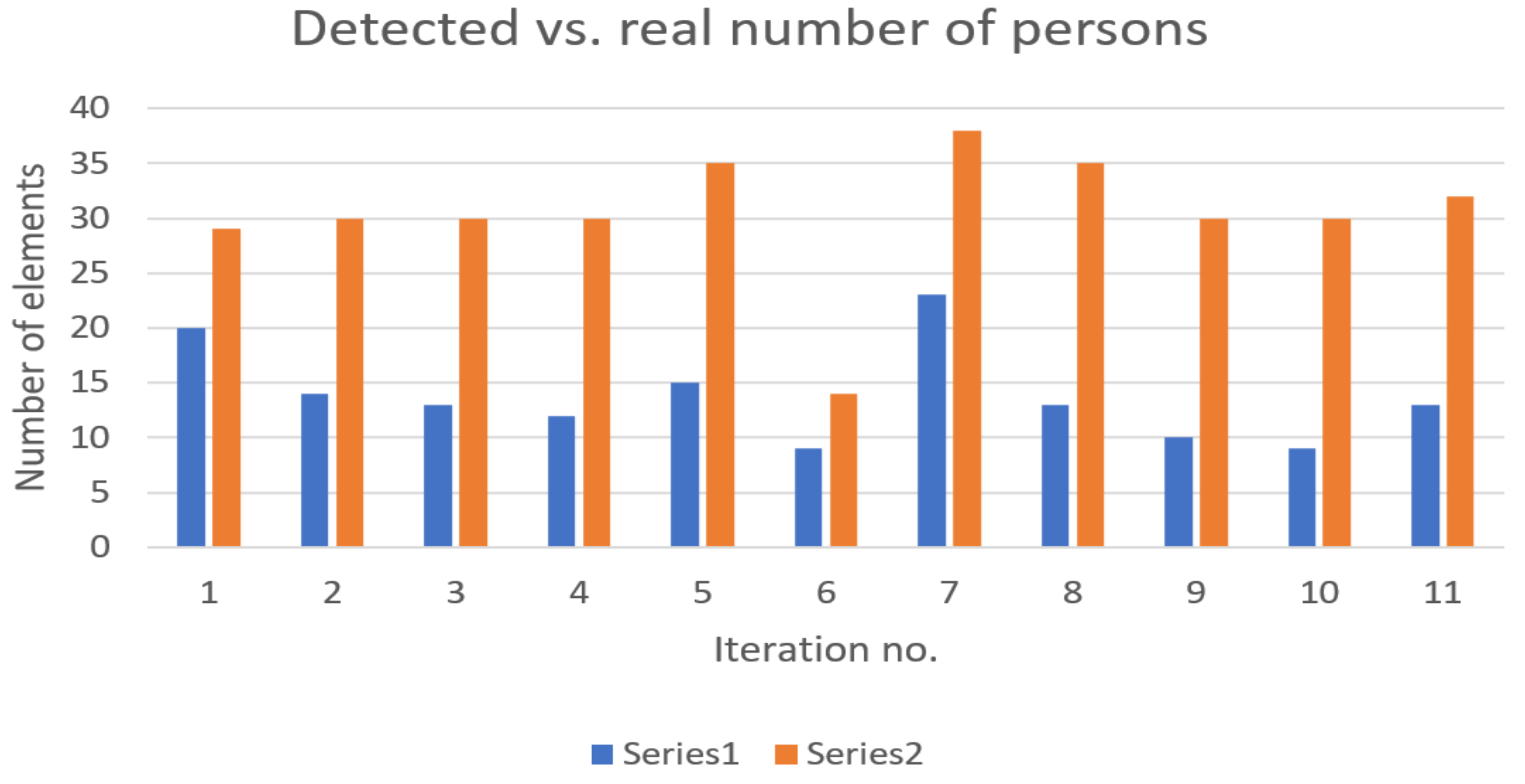
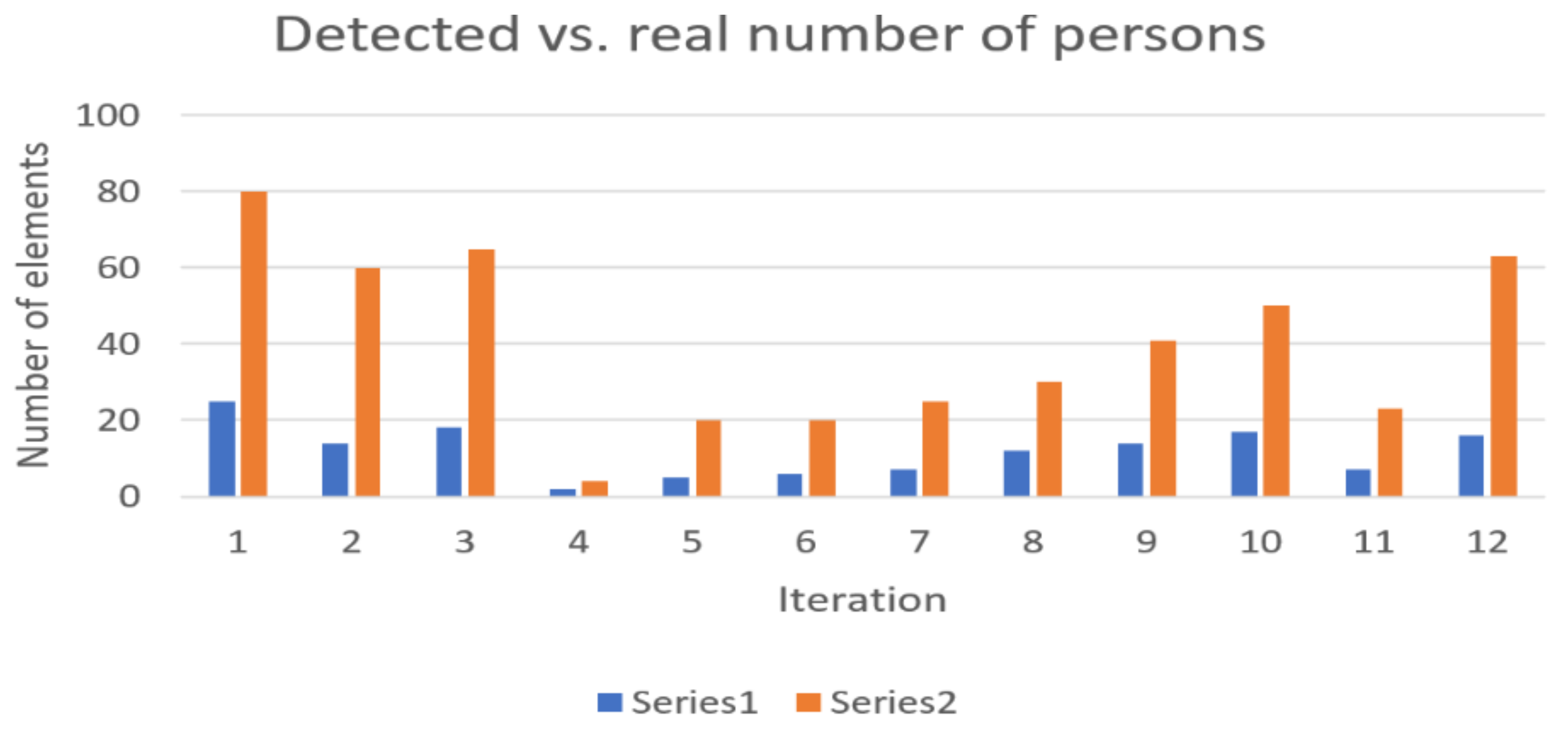
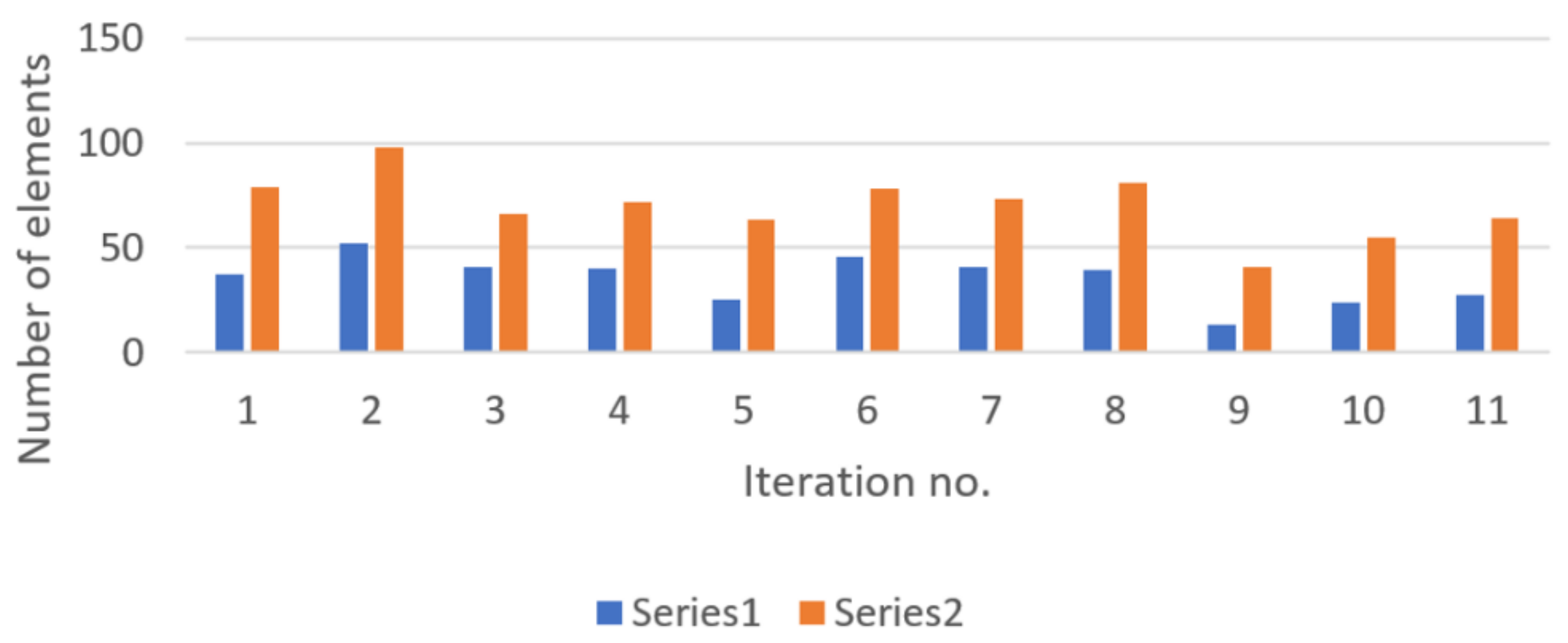
- Field measurements proved that representativity of discoverable devices in relation to the real number of persons allows for a convenient estimation of real-world traffic behavior.
- Experiments on received signal strength and other transmission parameters for different scenarios have emphasized the main influencing factors that affect precision.
- Proposal of adequate models and solutions to improve the accuracy of location and tracking.
- In present developed urban environments exist enough devices with enabled Bluetooth, owned by travelers and capable of being detected and/or tracked,
- BT has a low consumption of energy,
- Precise enough indoor localization based on RSSI, signal strength and/or other parameters is also suitable for the movement tracking of people, passenger flow evaluation, or origin–destination estimation.
2. Materials and Methods
2.1. Field Tests for Determining the Representativity of Detectable Devices among People and/or Vehicles
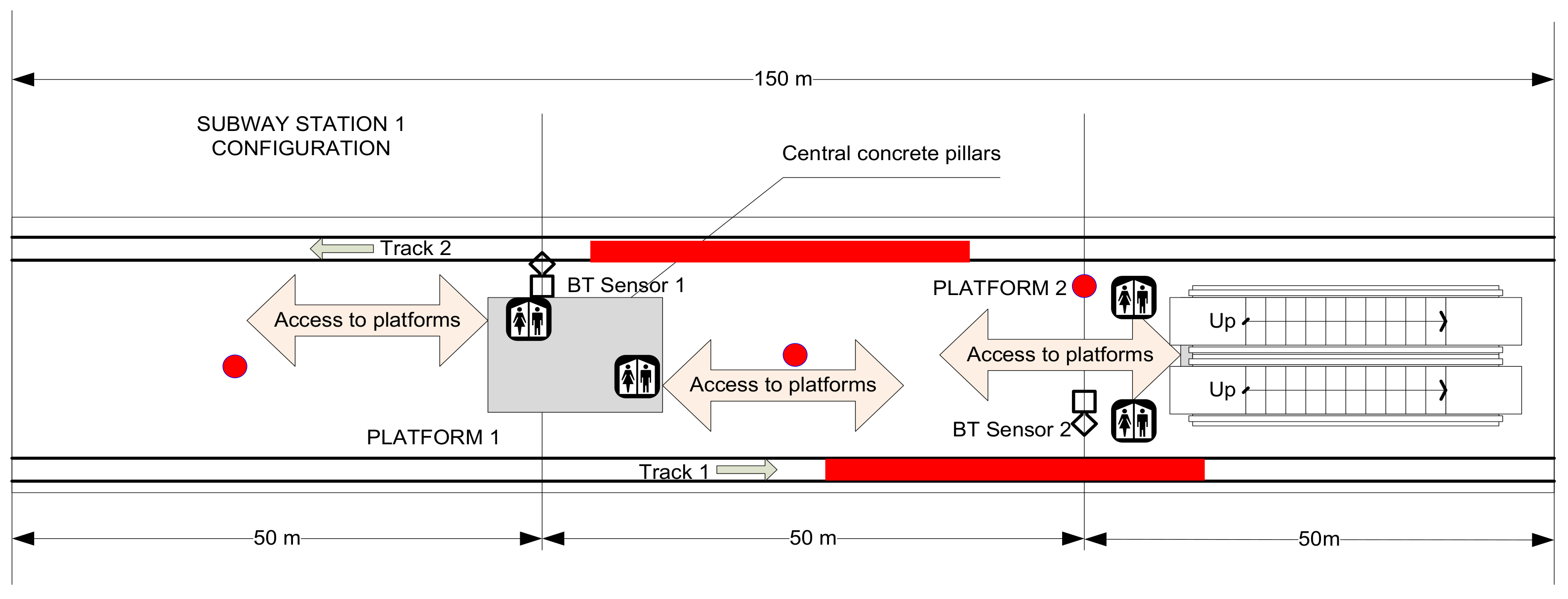
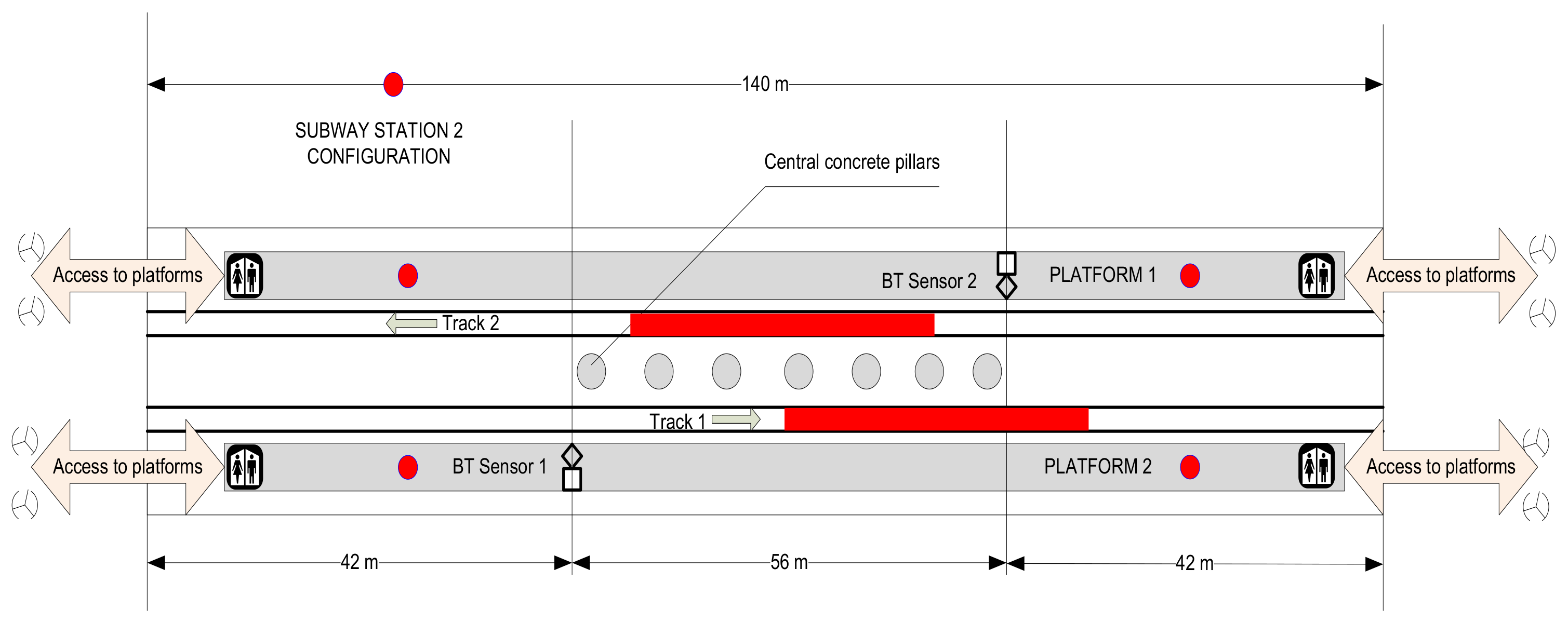
2.1.1. Setups of Subway Testing Environment
- Hardware: Mobile phones Realme RMX3511 (C35)—Android 11, Xiaomi Redmi Note 9Pro—Android 11/MIUI 12.5.8, Samsung SM-A505FN/DS (A50)—Android 11/UI 3.1,
- Software: Bluepixel Technologies LLP/BLE Scanner version 3.21, BLE Analyzer version 1.1 /June 10,2020, BLE Radar V1.0.
- Methods for counting people: direct observation and recording.
2.1.2. Purpose of Tests
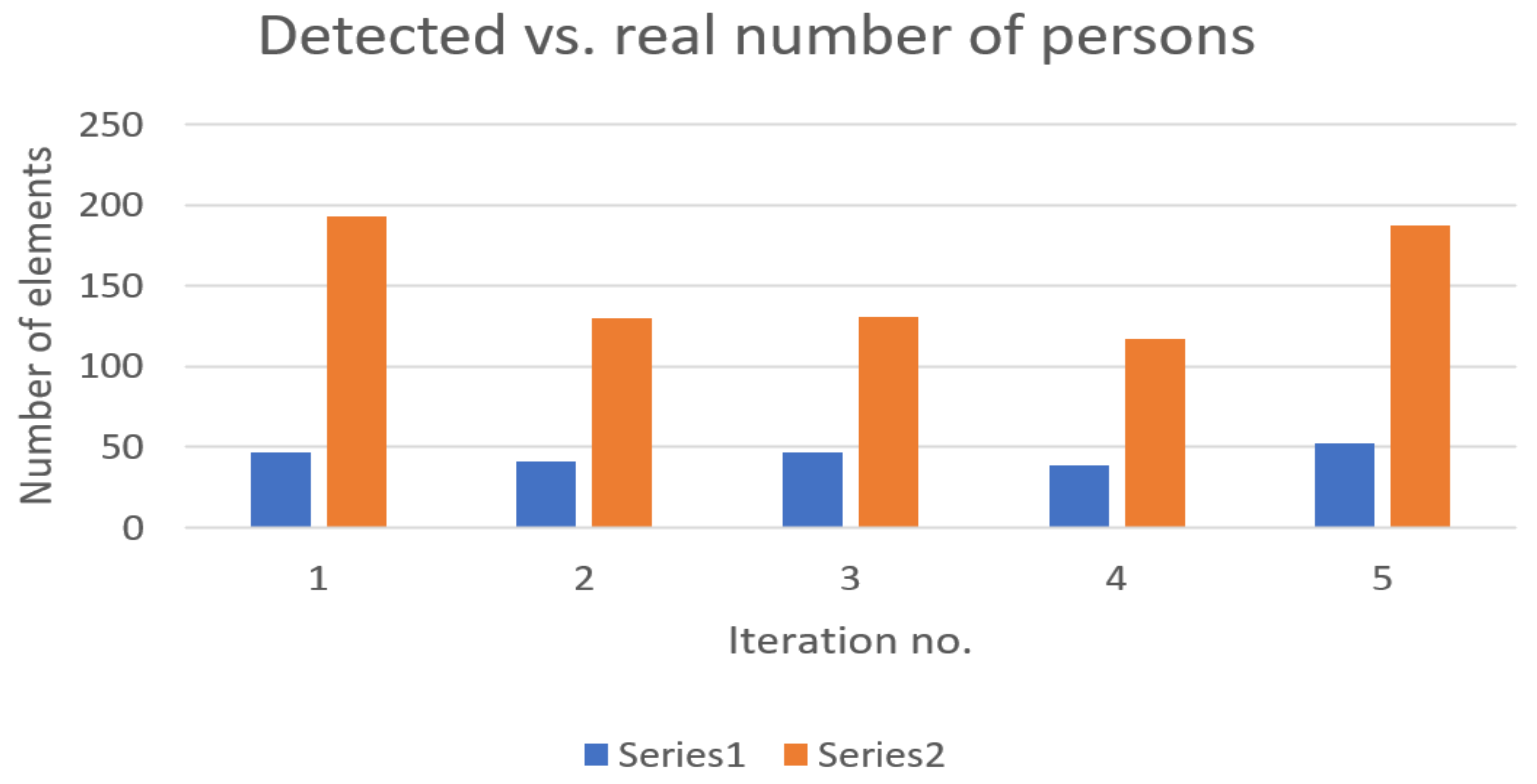
- On the platforms of the subway, with no trains in station.
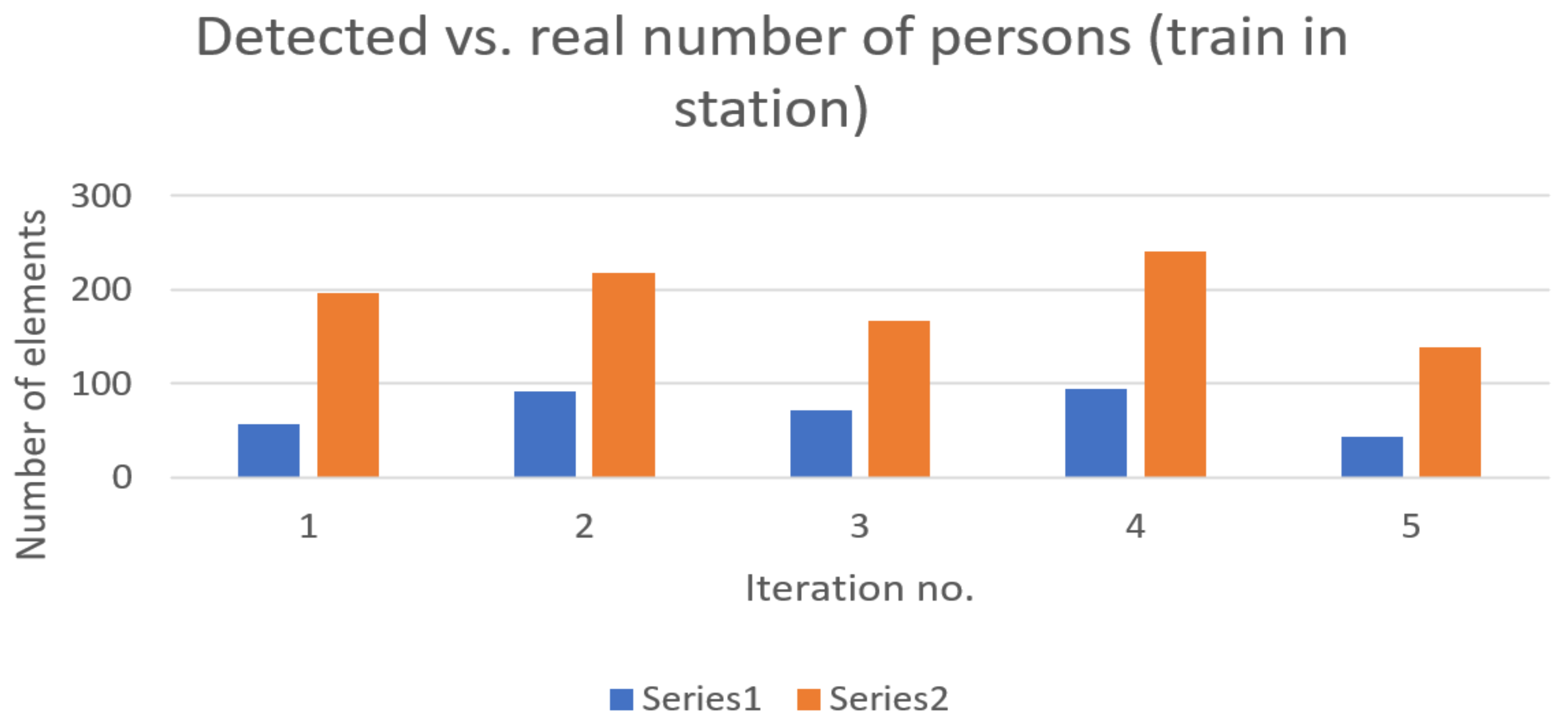
- On the platforms of the subway either with one or two trains in station.
- In trains, in movement, in tunnels.
2.1.3. Results of Field Measurements
- Conditions of first test: weekend day—station not busy.
2.2. Wireless and Unconventional Sensing Technologies—A Basis for Smart Mobility
RX—Based Location of Travelers
3. Results
3.1. Setups for Experimental Analysis on Signal Strength Usability for Travelers’ Tracking Purposes
3.2. Results of Experiments
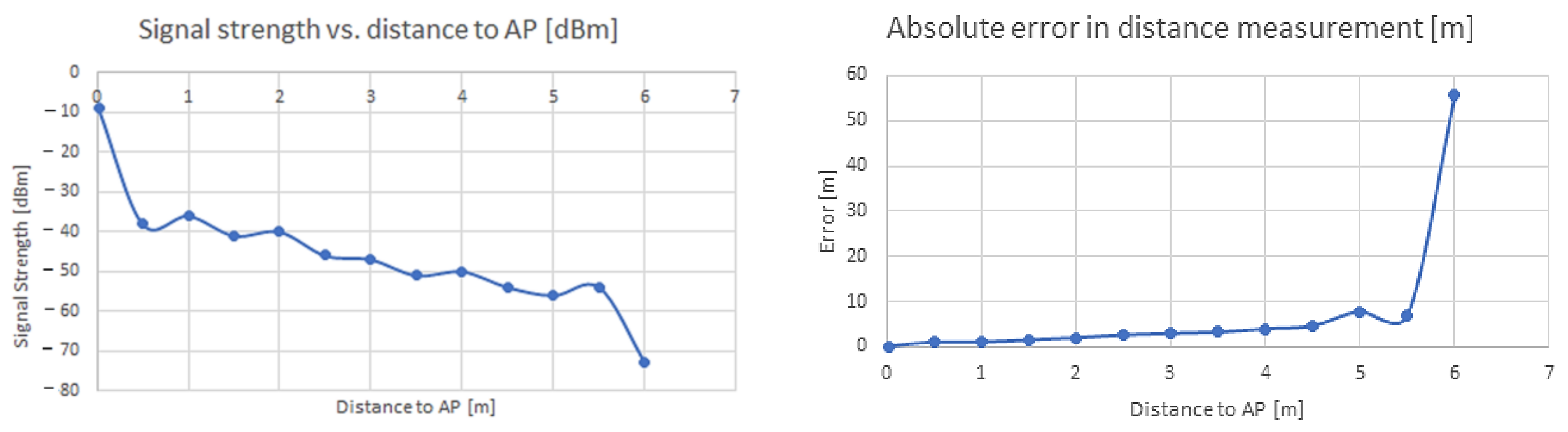
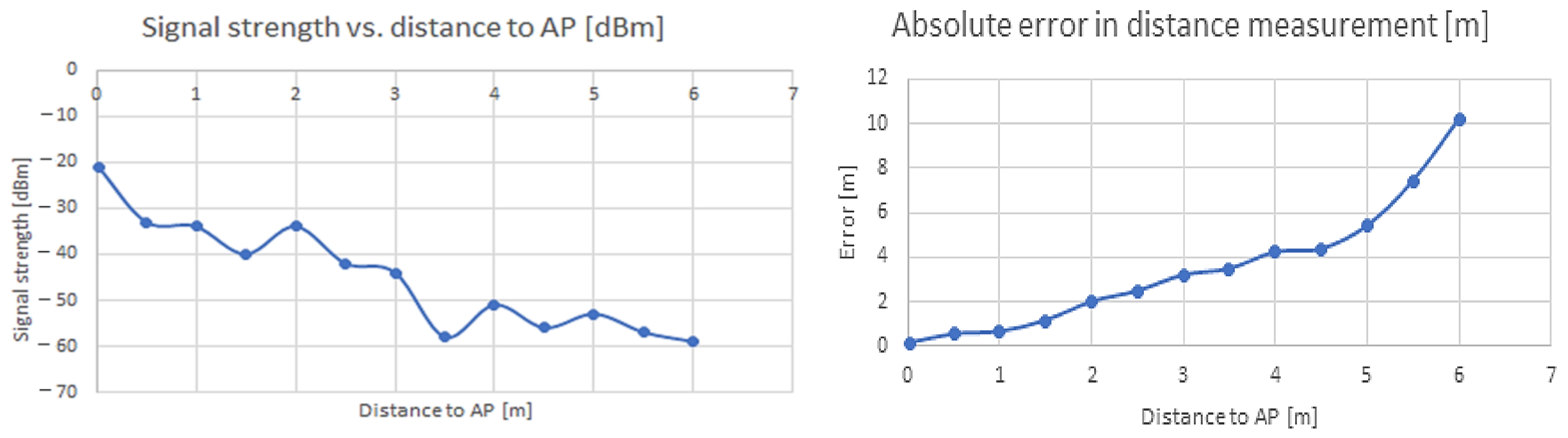
- The variations of signals strength indications after certain distances to access points are increasing.
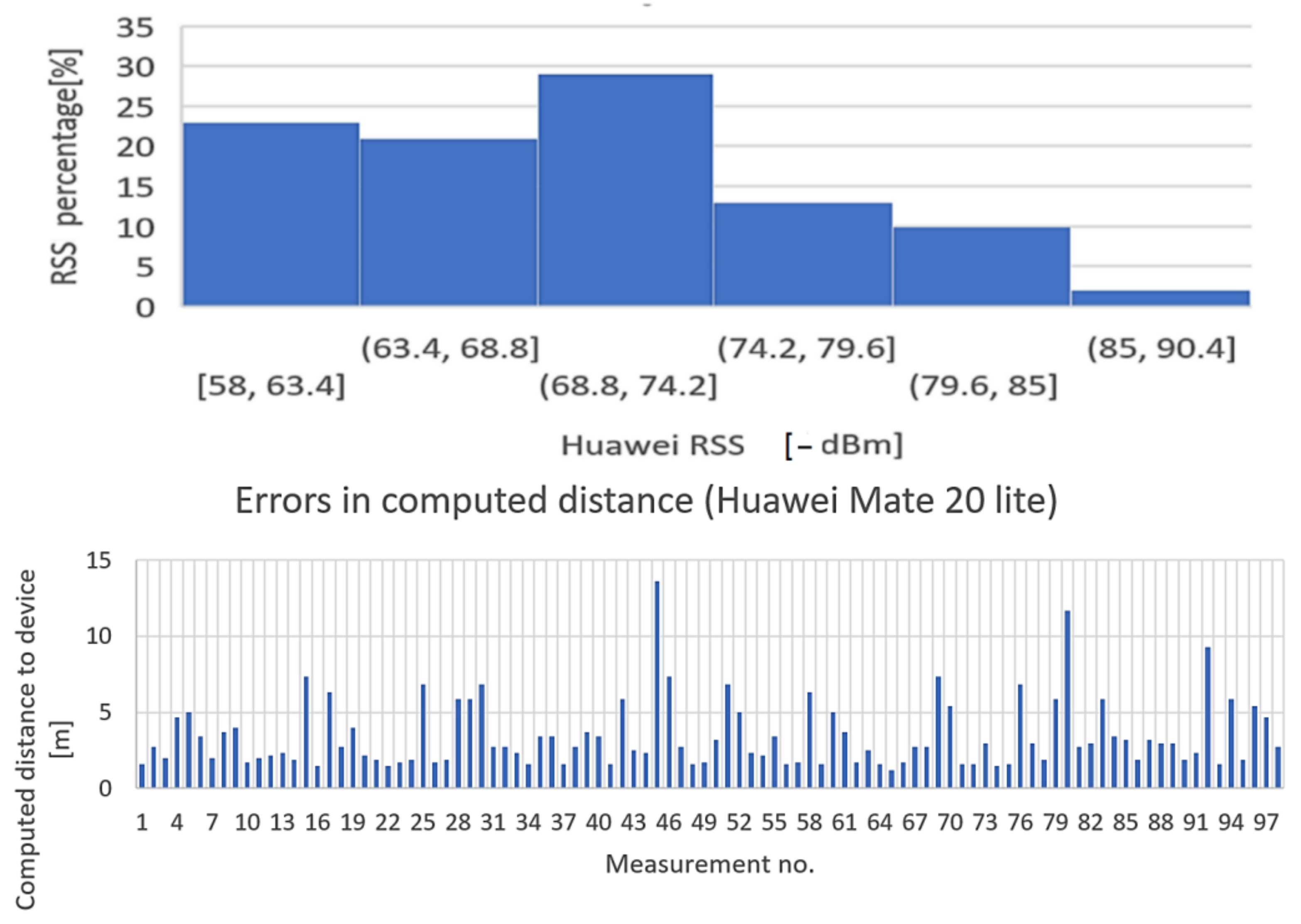
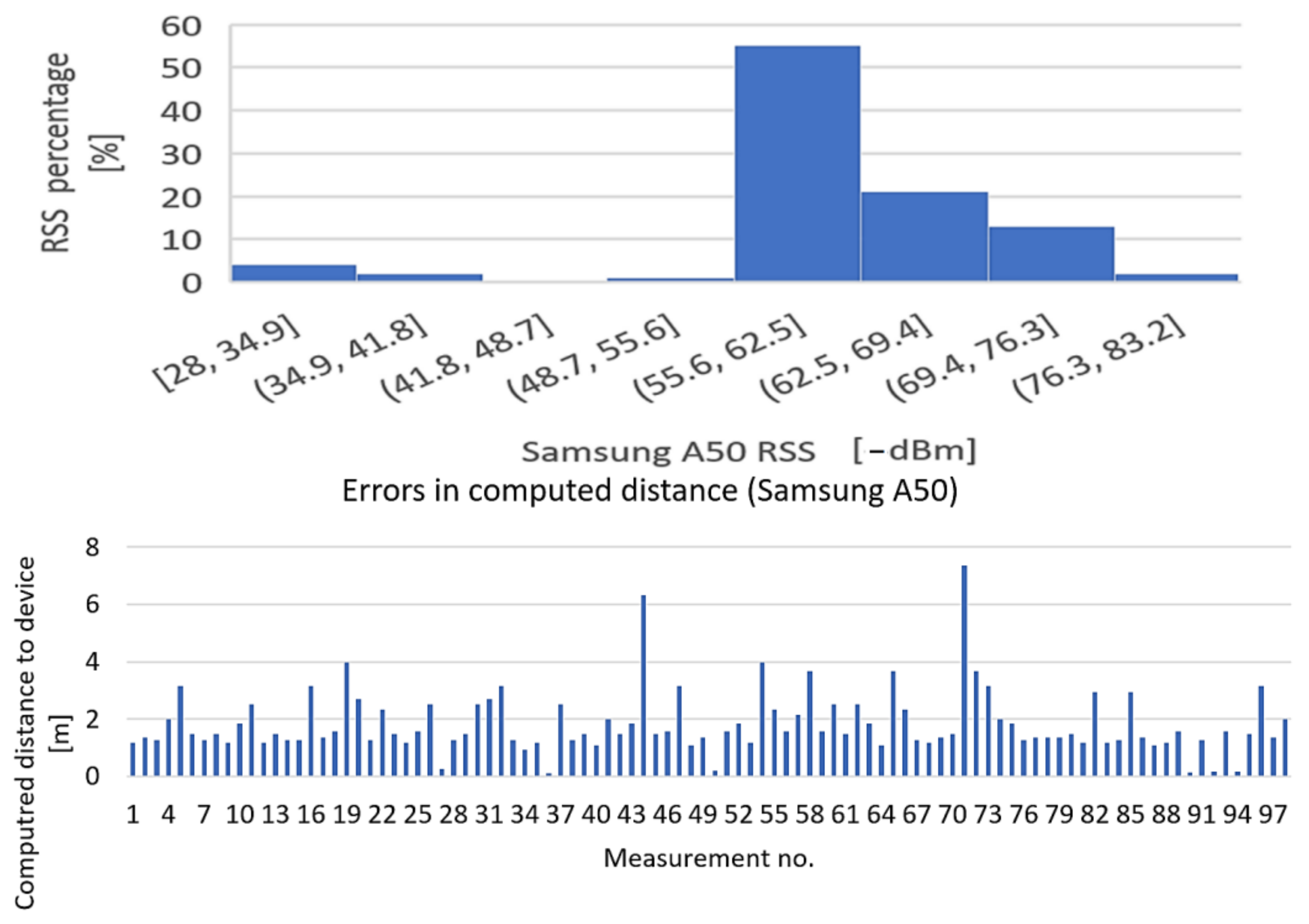
- Hardware diversity may also induce variations in distance measurements based on Wi-Fi technology.
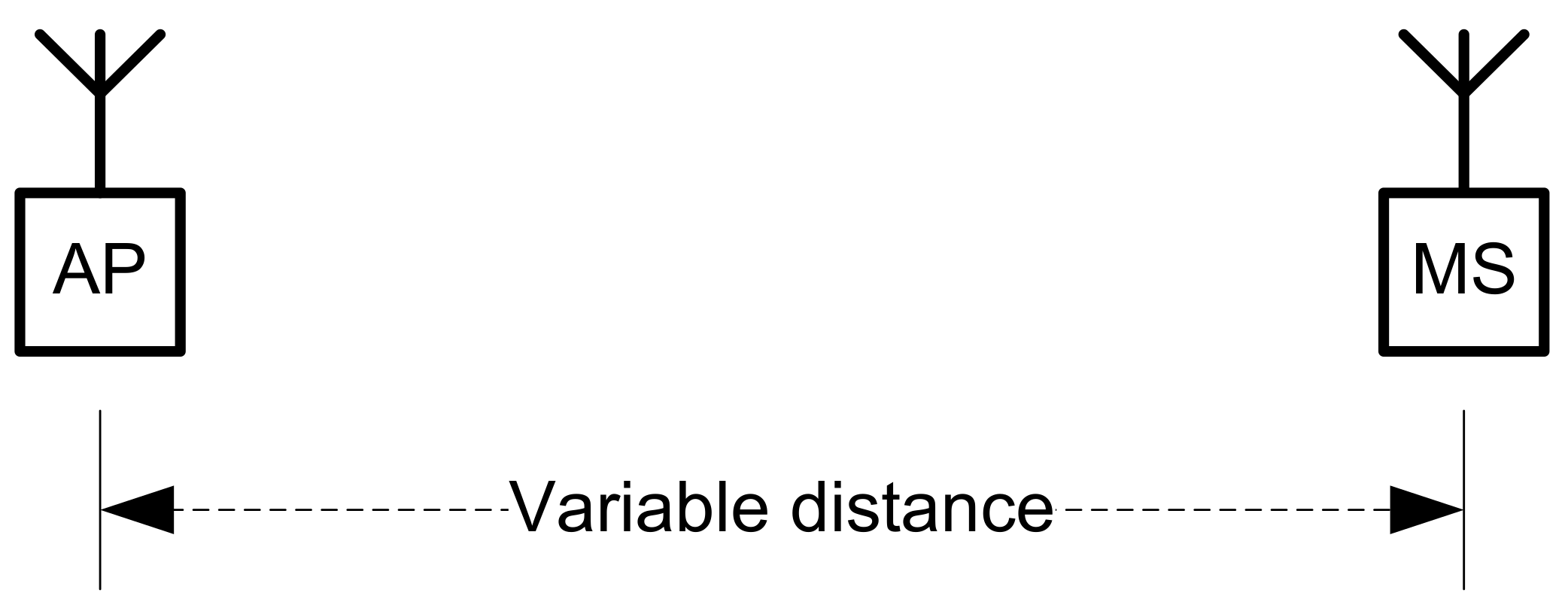
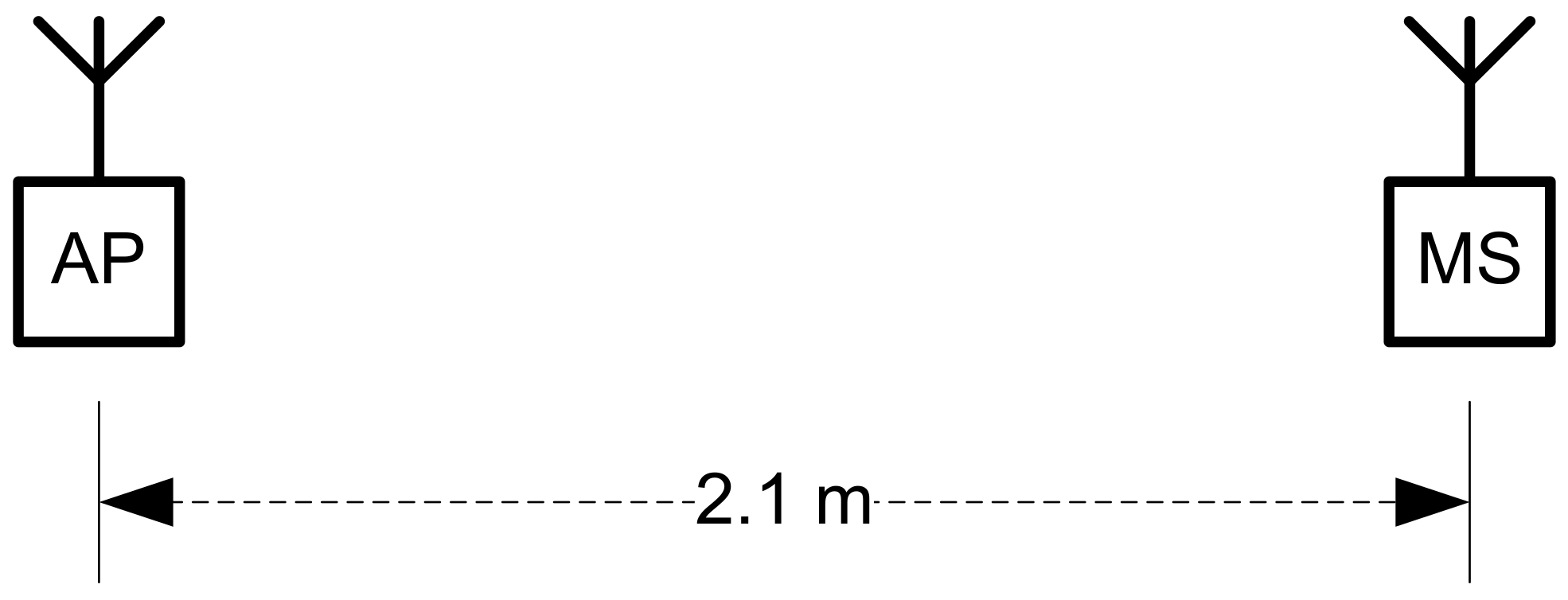
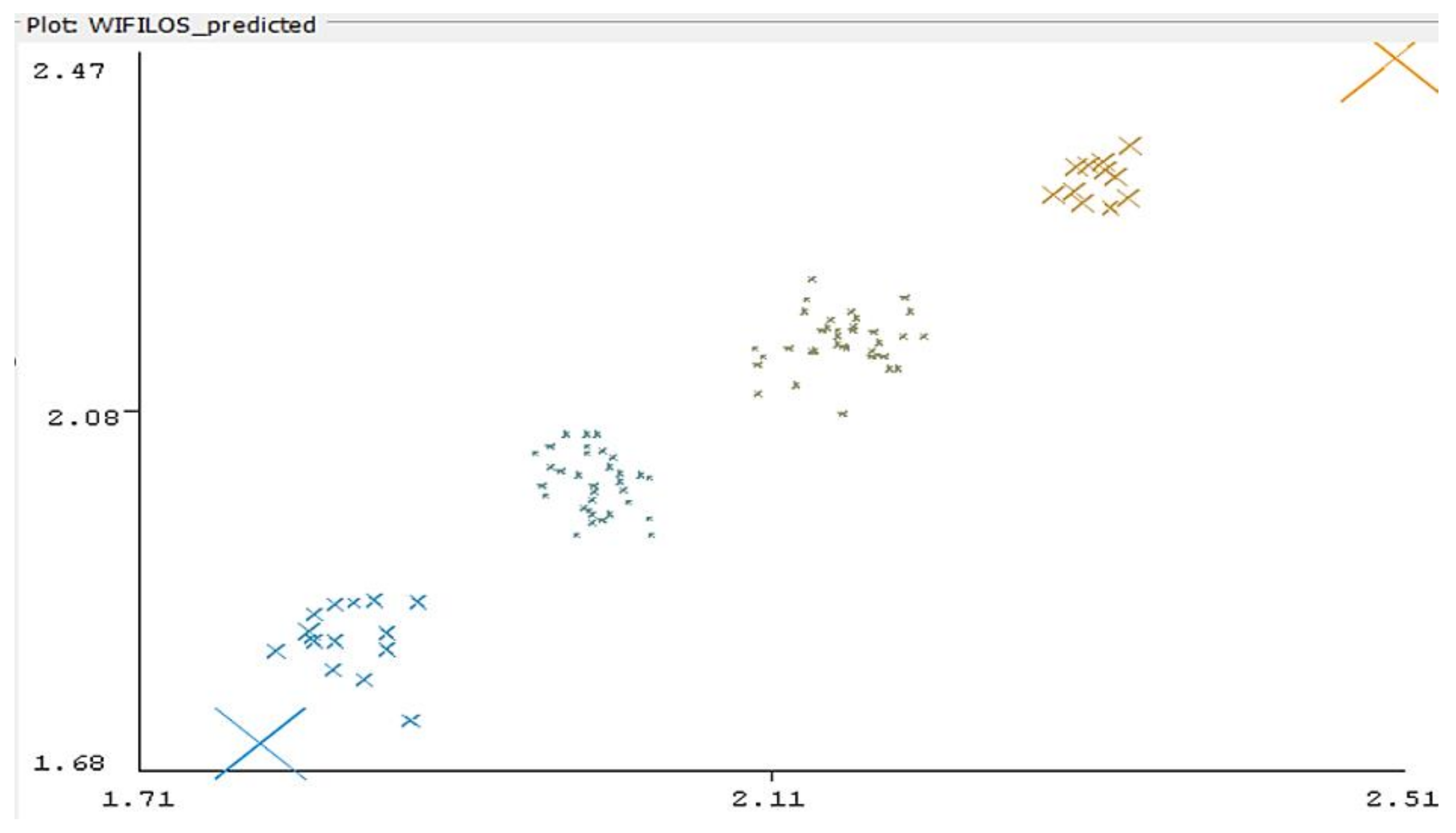
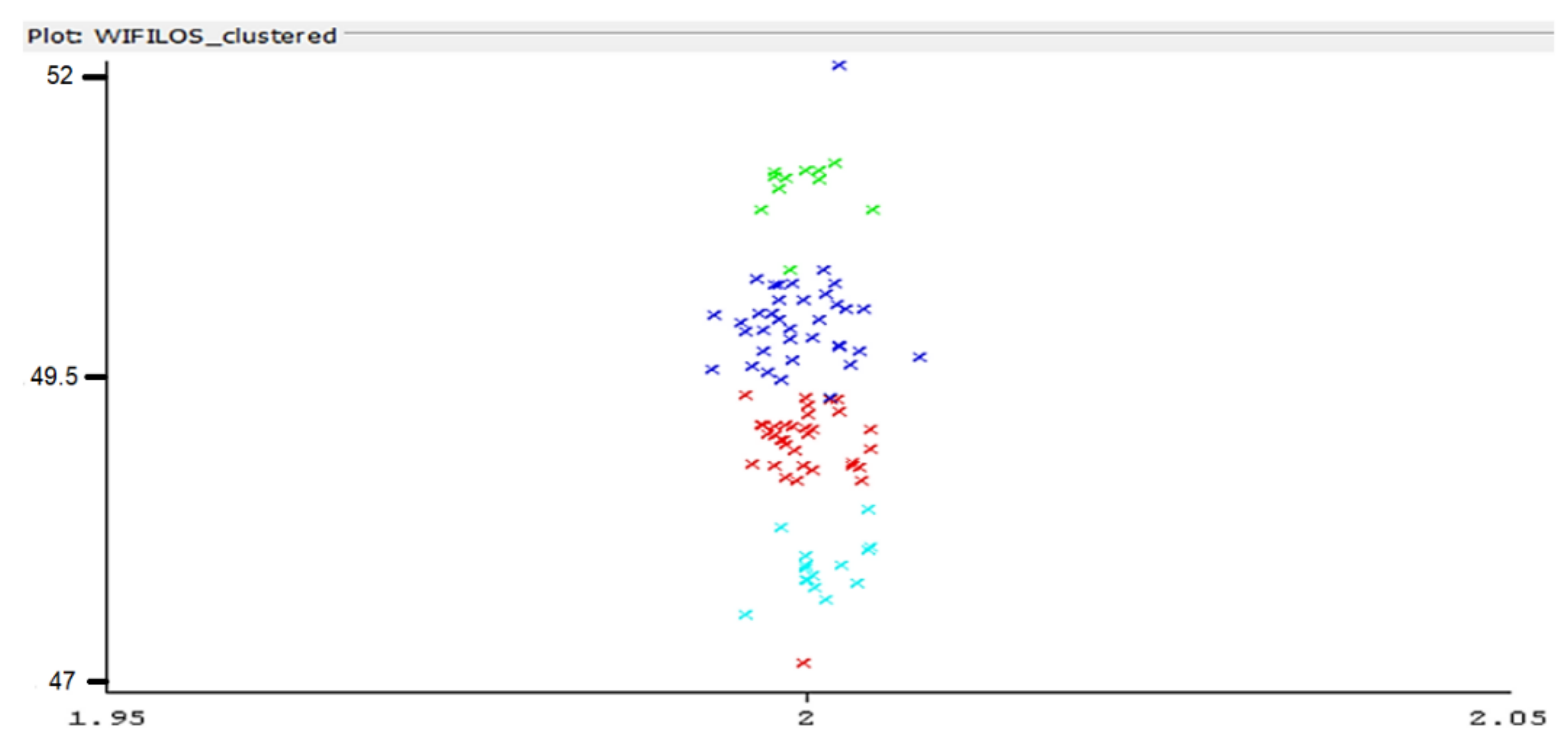
3.3. Experimental Analysis on Wi-Fi Signal Strength Variation in Stationary Conditions—LoS Connection
- AP: Huawei Technologies, MAC 58:20:59:71:B4:FD, WPA2,Wi-Fi channel 1, f = 2412 MHz, channel width 20 MHz, Link speed 65 Mbps
- MS Device: Xiaomi Redmi Note 8 Pro, MIUI Global 12.0.5, Android 10 QP1A
- Software: Measurement: Network Signal Info version 5.74.03, Ping Tools 4.64 Free, Wi-Fi Analyzer V1.0.4, Signal Strength V26.1.1. Data processing: Excel version 2211 (Build 15831.20122), Weka 3.8.6 (Weka Environment for Knowledge Analysis).
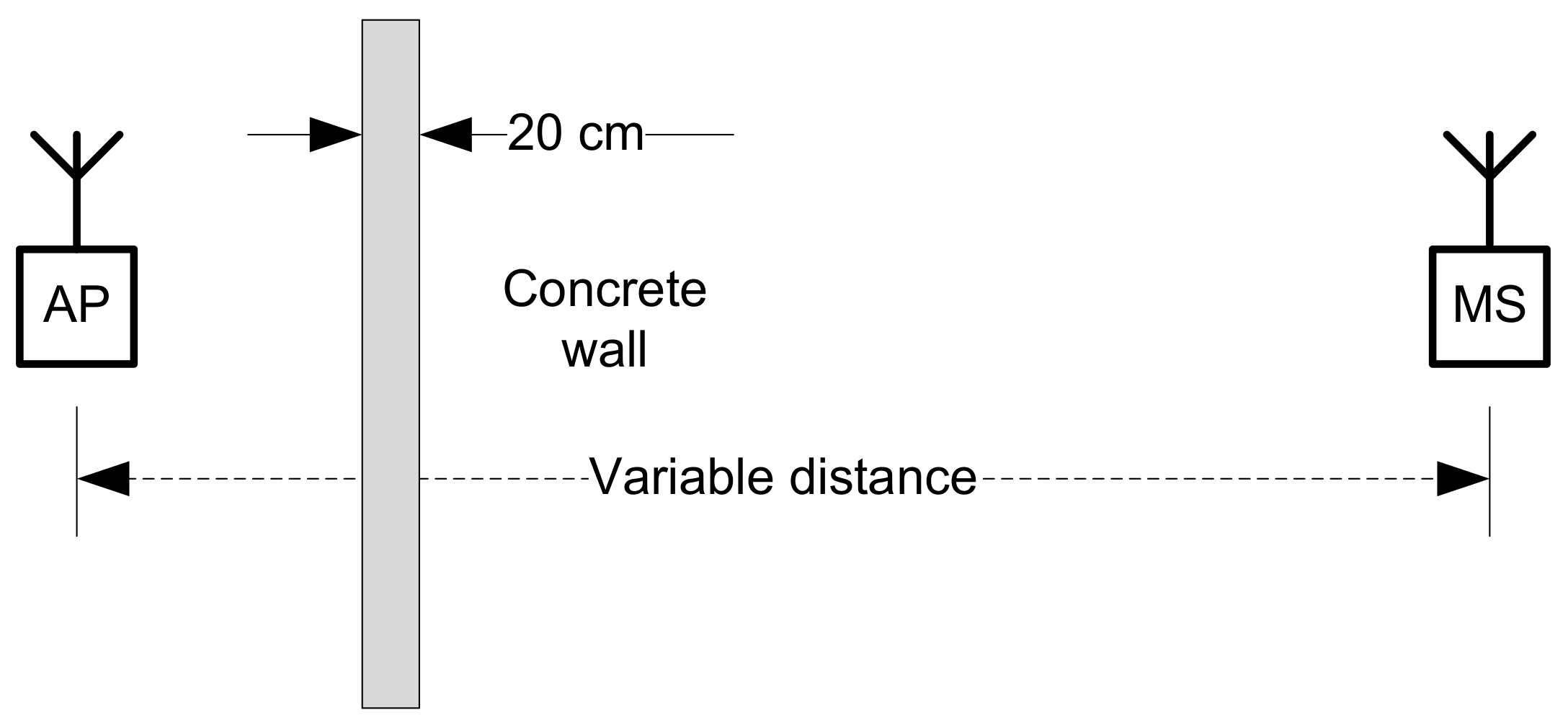
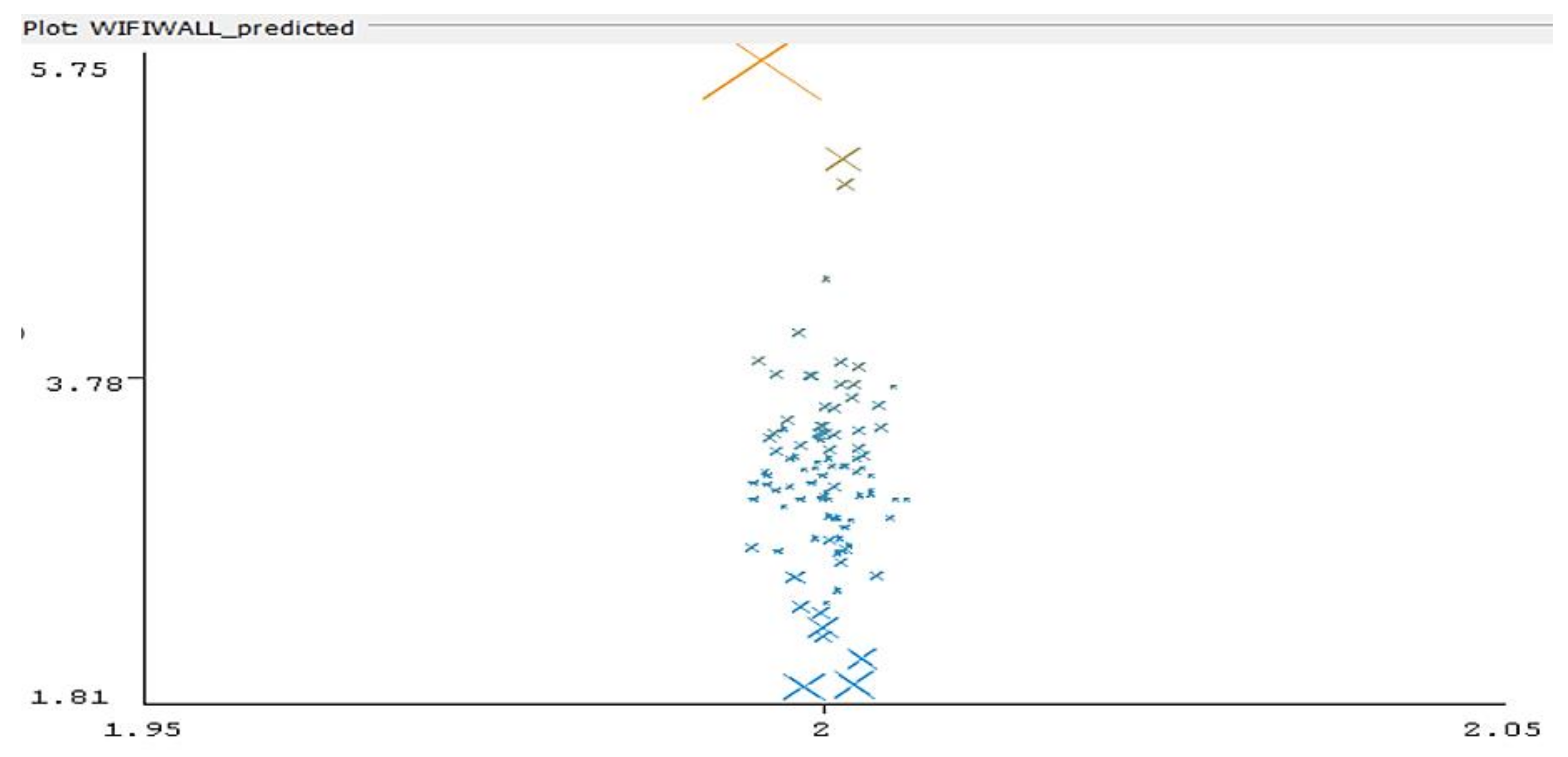
3.4. Experimental Analysis on Wi-Fi and BT Signal Strength Variation in Stationary Conditions—NLoS Connection
- BT devices: Amazfit Bip Watch,
- Xiaomi Redmi Note 8 Pro, MIUI Global 12.0.5, Android 10 QP1A
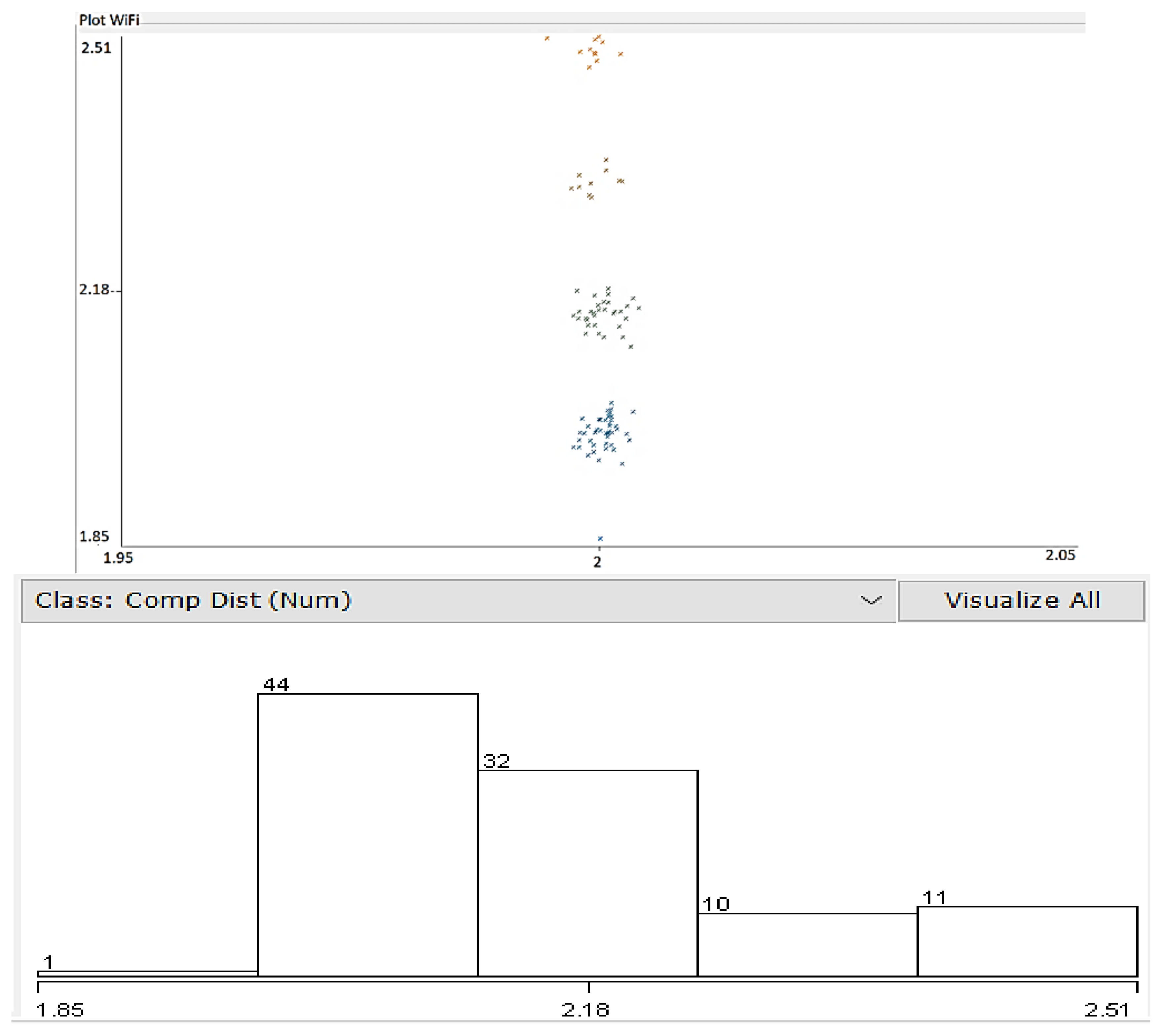
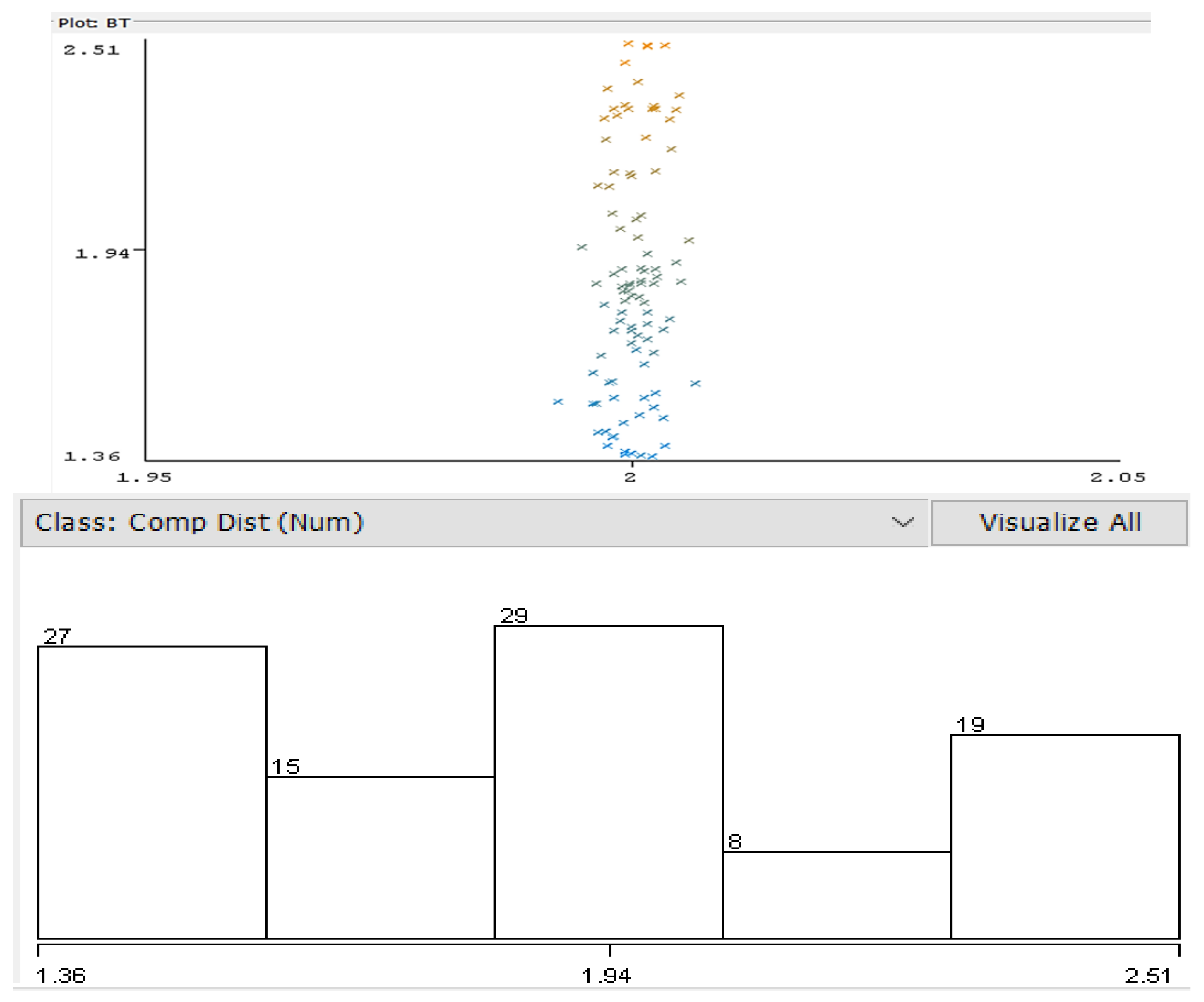
- Software: Measurement: BLE Analyzer. Data processing: Excel, Weka 3.8.6 (Weka Environment for Knowledge Analysis). Weka Environment analysis (with Linear Regression classifier)—Figure 17:
- Correlation coefficient 0.9961
- Mean absolute error 0.0255
- Root-mean-squared error 0.0291
- Relative absolute error 9.6277%
- Root relative squared error 8.8569%
- Total Number of Instances 98.
3.5. Influence of Travelers’ Density in Signals Propagation
3.6. Enhancing Indoors Location Accuracy with Additional RTT Computing
- TWGRM—Two-Way Ground-Reflection Model, which is applicable to situations where the two (transmitting and receiving) antennas are in line of sight (LoS). The model assumes that the detected device antenna receives both a direct line of propagation signal and a ground-reflected (delayed) signal. This model may be used for computing the expected distance in specific outdoors environments.
- LDPLM—Log Distance Path Loss Model, which is the most suitable model for densely populated areas and industrial environments (as is the real situation in crowded cities)
- WINNER II Indoor Model—for indoor scenarios:
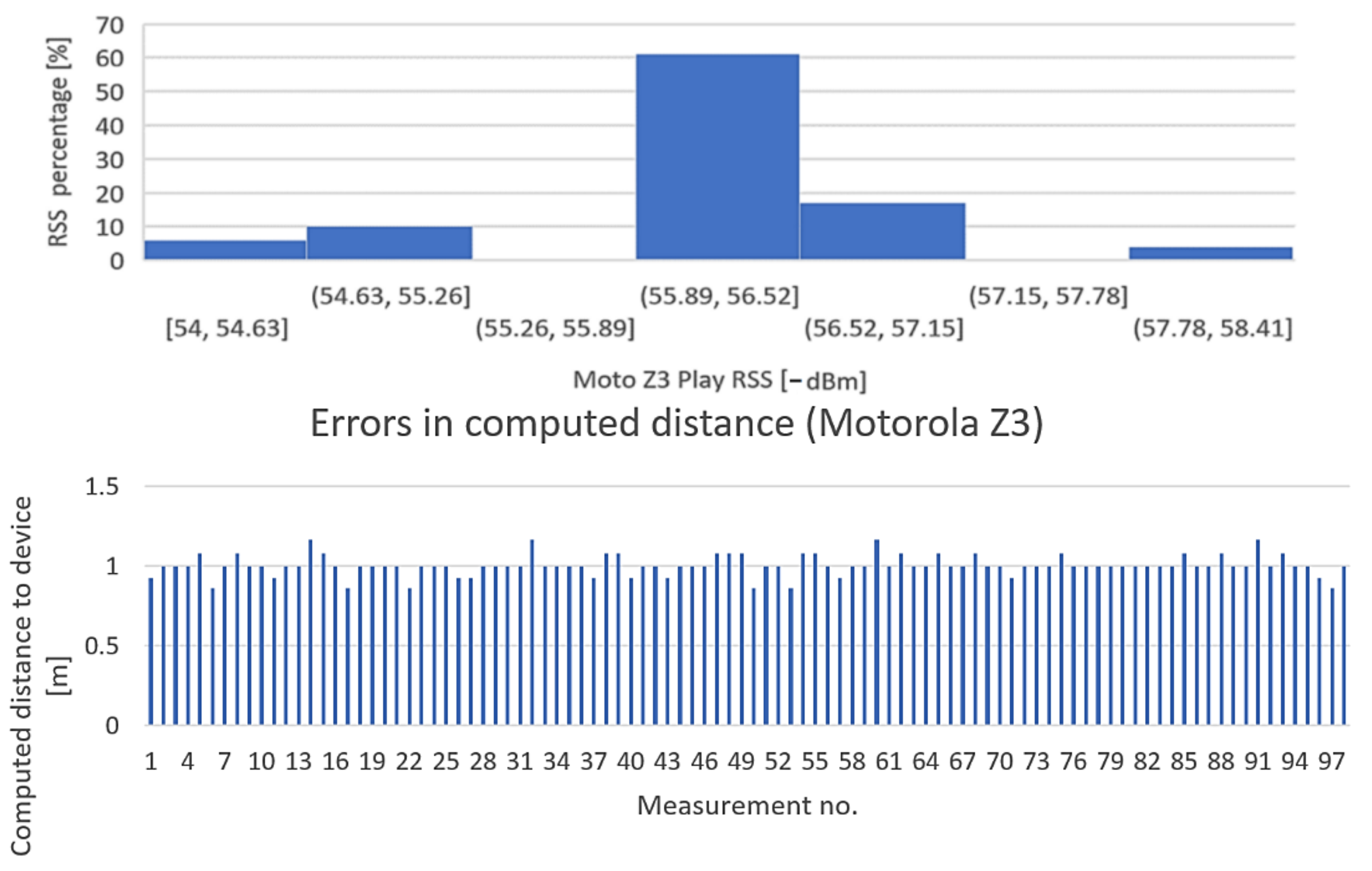
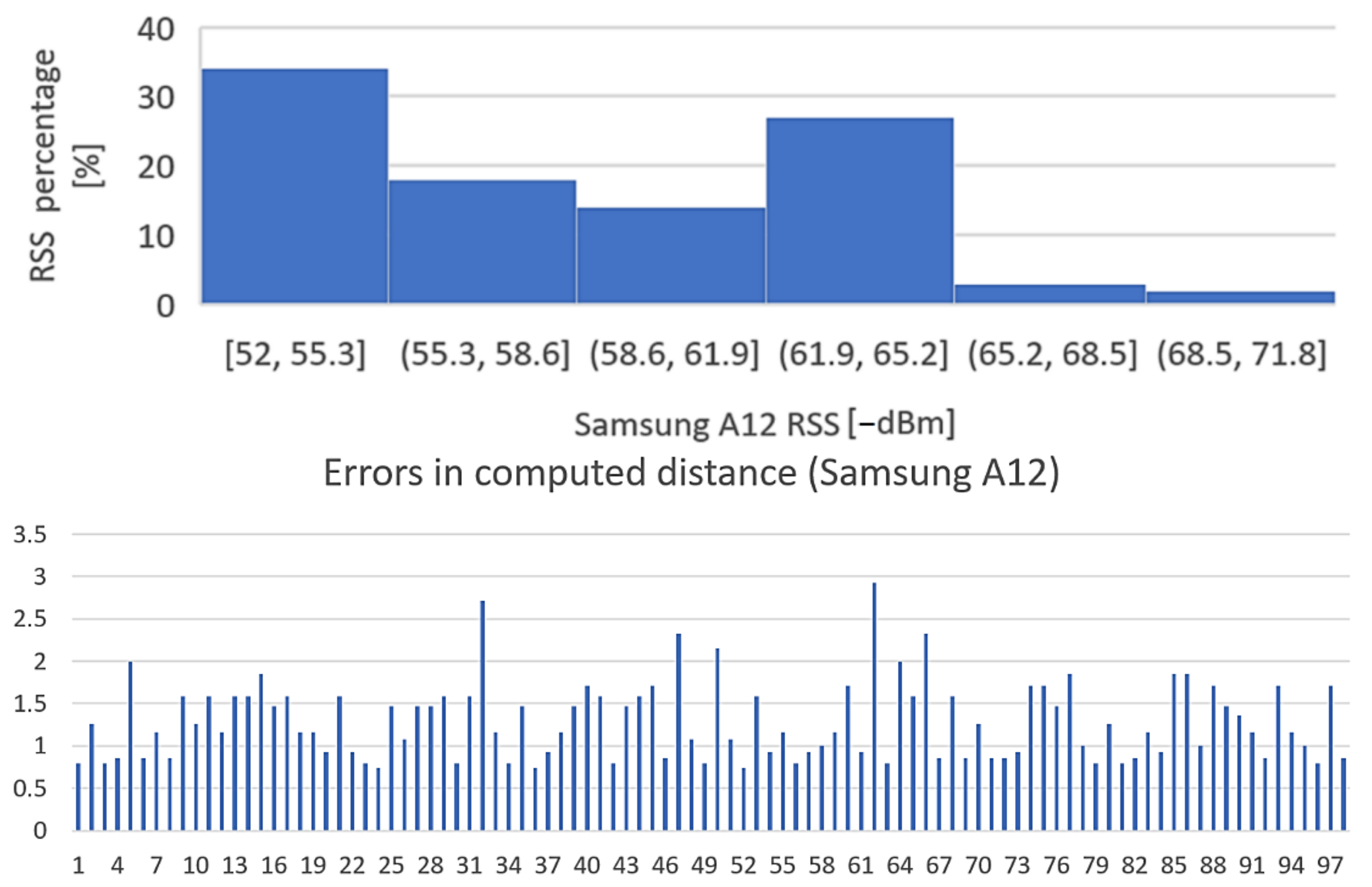
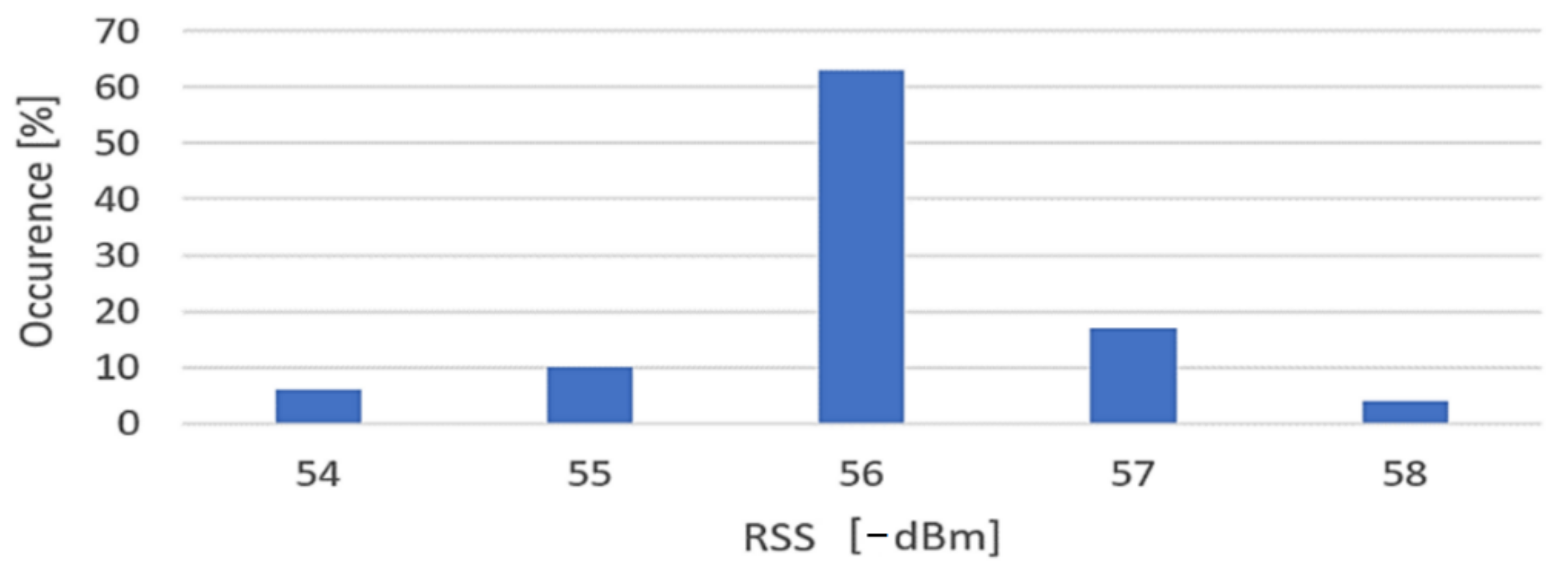
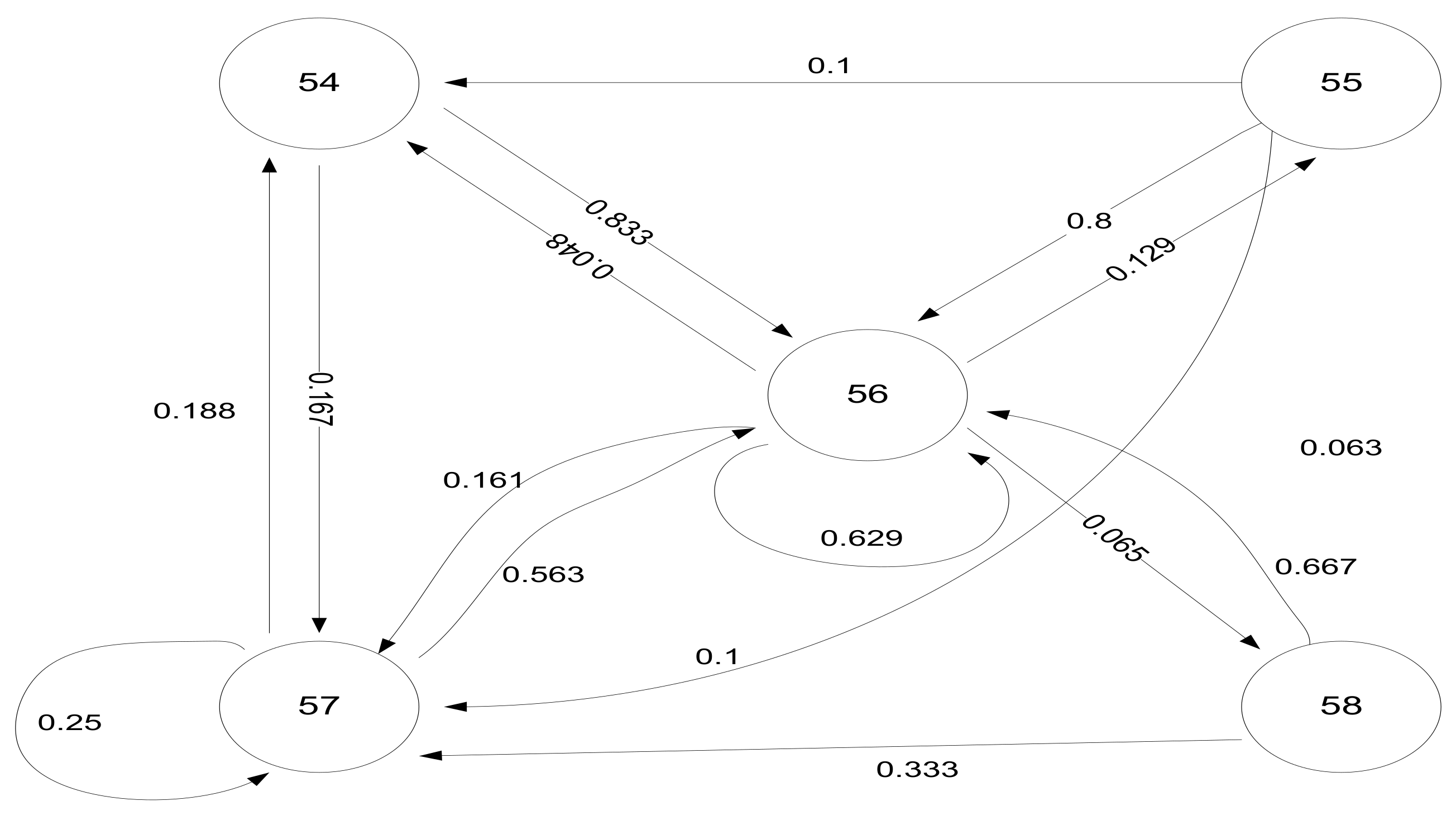
3.7. Analyzing the Influence of Hardware Diversity in Indoors Localization Based on RSSI//RTT Technologies
4. Discussion
- Representativity of discoverable devices in the mass of physical persons present in the region of interest.
- Analysis of different scenarios that may influence the accuracy of the collected data: behavior of received signal strength under LoS and NLoS conditions of propagation, influence of concrete walls on signal strength, influence of positions of terminals and density of people on signal strength (presented in [30]), influence of travelers’ ages on representativity, and influence of hardware diversity.
- Possibility to determine data correction solutions and behavior models for specific hardware to improve the accuracy of data.
- Variability in time and space.
- Variability in representativity in comparison to the whole set of individuals, due to the data collection methodology employed.
- Non-uniformity in the density and shape of collected data points.
- Variability of interest parameters associated with the collected data.
5. Conclusions
6. Patents
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybernet. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Farid, Z.; Nordin, R.; Ismail, M. Recent Advances in Wireless Indoor Localization Techniques and System. J. Comput. Networks Commun. 2013, 2013, 185138. [Google Scholar] [CrossRef]
- Sun, Y.; He, Y.; Meng, W.; Zhang, X. Voronoi Diagram and Crowdsourcing-Based Radio Map Interpolation for GRNN Fingerprinting Localization Using WLAN. Sensors 2018, 18, 3579. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A Hybrid Smartphone Indoor Positioning Solution for Mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Ye, Q.; Cheng, J.; Wang, L. RSSI-Based Bluetooth Indoor Localization. In Proceedings of the 2015 11th International Conference on Mobile Ad-hoc and Sensor Networks (MSN), Shenzhen, China, 16–18 December 2015; pp. 165–171. [Google Scholar] [CrossRef]
- Chan, S.; Sohn, G. Indoor Localization using Wi-Fi Based Fingerprinting and Trilateration Techiques for Lbs Applications. ISPRS—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-4/C26, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Ying, S.; Xu, G.; Li, C.; Mao, Z. Point Cluster Analysis Using a 3D Voronoi Diagram with Applications in Point Cloud Segmentation. ISPRS Int. J. Geo-Inf. 2015, 4, 1480–1499. [Google Scholar] [CrossRef] [Green Version]
- Hossain, A.K.M.M.; Soh, W.-S. A Comprehensive Study of Bluetooth Signal Parameters for Localization. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, PIMRC, Athens, Greece, 3–7 September 2007; pp. 1–5. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-Building RF-Based User Location and Tracking System. In Proceedings of the Proceedings IEEE INFOCOM 2000. Conference on Computer Communications. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No.00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Gwon, Y.; Jain, R.; Kawahara, T. Robust indoor location estimation of stationary and mobile users. In Proceedings of the IEEE INFOCOM 2004, Hong Kong, China, 7–11 March 2004; Volume 2, pp. 1032–1043. [Google Scholar] [CrossRef]
- Castaňo, J.G.; Svensson, M.; Ekström, M. Local positioning for wireless sensors based on Bluetooth/spl trade/. In Proceedings of the 2004 IEEE Radio and Wireless Conference (IEEE Cat. No.04TH8746), Atlanta, GA, USA, 22 September 2004; pp. 195–198. [Google Scholar] [CrossRef]
- Wen, Y.; Tian, X.; Wang, X.; Lu, S. Fundamental limits of RSS fingerprinting based indoor localization. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 25 April–1 May 2015; pp. 2479–2487. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor Localization via Channel Response. ACM Comput. Surv. 2013, 46, 1–32. [Google Scholar] [CrossRef]
- Elnahrawy, E.; Li, X.; Martin, R. The limits of localization using signal strength: A comparative study. In Proceedings of the 2004 First Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks, IEEE SECON 2004, Santa Clara, CA, USA, 4–7 October 2004. [Google Scholar] [CrossRef] [Green Version]
- Zou, D.; Meng, W.; Han, S.; He, K.; Zhang, Z. Toward Ubiquitous LBS: Multi-Radio Localization and Seamless Positioning. IEEE Wirel. Commun. 2016, 23, 2–8. [Google Scholar] [CrossRef]
- Fang, S.-H.; Lin, T.-N. Cooperative multi-radio localization in heterogeneous wireless networks. IEEE Trans. Wirel. Commun. 2010, 9, 1547–1551. [Google Scholar] [CrossRef]
- LaMance, J.; Small, D. Locata correlator-based beam forming antenna technology for precise indoor positioning and attitude. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation 2011, ION GNSS 2011, Portland, OR, USA, 20–23 September 2011; Volume 4. [Google Scholar]
- Sun, G.; Chen, J.; Guo, W.; Liu, K.R. Signal processing techniques in network-aided positioning: A survey of state-of-the-art positioning designs. IEEE Signal Process. Mag. 2005, 22, 12–23. [Google Scholar] [CrossRef]
- Zhao, Y. Standardization of mobile phone positioning for 3G systems. IEEE Commun. Mag. 2002, 40, 108–116. [Google Scholar] [CrossRef]
- Zhao, Y. Mobile phone location determination and its impact on intelligent transportation systems. IEEE Trans. Intell. Transp. Syst. 2000, 1, 55–64. [Google Scholar] [CrossRef]
- Hazas, M.; Ward, A. A high performance privacy-oriented location system. In Proceedings of the 1st IEEE International Conference on Pervasive Computing and Communications, Fort Worth, TX, USA, 26 March 2003. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Lymberopoulos, D.; Liu, J.; Priyantha, B. FM-based indoor localization. In Proceedings of the 10th international conference on Mobile systems, applications, and services-MobiSys ‘12, Lake District, UK, 25–29 June 2012; pp. 169–182. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, Fort Worth, Texas, USA, 26 March 2003; pp. 407–415. [Google Scholar]
- Sun, Z.; Purohit, A.; De Wagter, P.; Brinster, I.; Hamm, C.; Zhang, P. PANDAA. In Proceedings of the ACM SIGCOMM 2011 conference on SIGCOMM-SIGCOMM ‘11, Toronto, ON, Canada, 15–19 August 2011; p. 442. [Google Scholar] [CrossRef]
- Huang, W.; Xiong, Y.; Li, X.-Y.; Lin, H.; Mao, X.; Yang, P.; Liu, Y. Shake and walk: Acoustic direction finding and fine-grained indoor localization using smartphones. In Proceedings of the IEEE INFOCOM 2014-IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 370–378. [Google Scholar] [CrossRef] [Green Version]
- Gharebaghi, A.; Mostafavi, M.A.; Larouche, C.; Esmaeili, K.; Genon, M. Precise indoor localization and mapping using mobile laser scanners: A scoping review. Geomatica 2022, 1–13. [Google Scholar] [CrossRef]
- Baatar, G.; Eichhorn, M.; Ament, C. Precise indoor localization of multiple mobile robots with adaptive sensor fusion using odometry and vision data. IFAC Proc. Vol. 2014, 47, 7182–7189. [Google Scholar] [CrossRef] [Green Version]
- Bischoff, B.; Nguyen-Tuong, D.; Streichert, F.; Ewert, M.; Knoll, A. Fusing vision and odometry for accurate indoor robot localization. In Proceedings of the 2012 12th International Conference on Control Automation Robotics & Vision (ICARCV), Guangzhou, China, 5–7 December 2012; pp. 347–352. [Google Scholar] [CrossRef] [Green Version]
- Se, S.; Lowe, D.; Little, J. Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks. Int. J. Robot. Res. 2002, 21, 735–758. [Google Scholar] [CrossRef]
- Minea, M.; Dumitrescu, C.; Costea, I.M.; Chiva, I.C.; Semenescu, A. Developing a Solution for Mobility and Distribution Analysis Based on Bluetooth and Artificial Intelligence. Sensors 2020, 20, 7327. [Google Scholar] [CrossRef] [PubMed]
- Chiva, I.-C.; Minea, M.; Minea, V.-L.; Semenescu, A. Anonymous Detection of Traveler Flows Employing Bluetooth Technologies. In Proceedings of the 14th International Conference on Interdisciplinarity in Engineering—INTER-ENG 2020, Targu Mures, Romania, 8–9 October 2020; p. 61. [Google Scholar] [CrossRef]
- Minea, M. An Experimental Survey on Wi-Fi Efficiency for Smart Subway Applications. In Proceedings of the International Conference on Traffic and Transport Engineering (ICTTE 2018), Belgrade, Serbia, 27–28 September 2018; pp. 1032–1041. [Google Scholar]
- Minea, M.; Gheorghiu, R.A.; Iordache, V.; Surugiu, M.C.; Dima, M. A Survey on ZigBee Communications Efficiency for Subway Additional Services. In Proceedings of the 2018 41st International Conference on Telecommunications and Signal Processing (TSP), Athens, Greece, 4–6 July 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Mao, G.; Fidan, B. Localization Algorithms and Strategies for Wireless Sensor Networks; IGI Global: Pennsylvania, PA, USA, 2009. [Google Scholar] [CrossRef]
- Subedi, S.; Pyun, J.-Y. A Survey of Smartphone-Based Indoor Positioning System Using RF-Based Wireless Technologies. Sensors 2020, 20, 7230. [Google Scholar] [CrossRef] [PubMed]
- Mao, W.; Shen, R.; Wang, K.; Gong, G.; Xiao, Y.; Lu, H. Research on RSS Data Optimization and DFL Localization for Non-Empty Environments. Sensors 2018, 18, 4419. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, Y.; Huang, K.; Jiang, N.; Guo, X.; Li, Y.; Wang, G. An Exponential-Rayleigh Model for RSS-Based Device-Free Localization and Tracking. IEEE Trans. Mob. Comput. 2015, 14, 484–494. [Google Scholar] [CrossRef]
- Hostettler, R.; Kaltiokallio, O.; Yigitler, H.; Sarkka, S.; Jantti, R. RSS-based respiratory rate monitoring using periodic Gaussian processes and Kalman filtering. In Proceedings of the 25th European Signal Processing Conference, EUSIPCO 2017, Kos, Greece, 28 August–2 September 2017. [Google Scholar] [CrossRef] [Green Version]
- Torkamandi, P.; Kärkkäinen, L.; Ott, J. An Online Method for Estimating the Wireless Device Count via Privacy-Preserving Wi-Fi Fingerprinting. In Proceedings of the International Conference on Passive and Active Network Measurement, Virtual, 28–30 March 2021; p. 12671. [Google Scholar] [CrossRef]
- Dyo, V.; Ali, J. Privacy-preserving Identity Broadcast for Contact Tracing Applications. In Proceedings of the IFIP Wireless Days, Paris, France, 30 June–2 July 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Akiyama, S.; Morimoto, R.; Taniguchi, Y. A Study on Device Identification from BLE Advertising Packets with Randomized MAC Addresses. In Proceedings of the 2021 IEEE International Conference on Consumer Electronics-Asia, ICCE-Asia, Gangwon, Republic of Korea, 1–3 November 2021; pp. 1–4. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard | Frequency [GHz] | Range Indoors [m] | Range Outdoors [m] | Transmission Power [mW] |
|---|---|---|---|---|
| Bluetooth | 2.4–2.5 | 1–10 | 1–1000 | −20 dBm (0.01 mW) to +20 dBm (100 mW) |
| BLE | 2.4–2.5 | 1–10 | 1–100 | 10 |
| ZigBee | 2.4 | 20 | 1500 | 1 |
| nRF | 2.4–2.5 | 1–50 | 1–1000 | 1 |
| IEEE 802.11 b/g/n (Wi-Fi) | 2.4, 5 | 70 | 230 | 100 mW (20 dBm) on 2.4 GHz and 200 mW (23 dBm) on 5 GHz |
| LTE | Band 2: 1.9 Band 5: 0.85 Band 4: 1.7/2.1 | Cell | Cell | Variable |
| 5G (C-V2X) | FR1: <6 FR2: 24.25 to 71.0 | Cell | Cell | Variable |
| BT Discovered Devices (Far Located—FL) | BT Discovered Devices (Near Located—NL *) | Counted Number of Persons in Station | Percentage of Discoverable Persons [%] |
|---|---|---|---|
| 14 | 6 | 29 | 68.97 |
| 9 | 5 | 30 | 46.67 |
| 8 | 5 | 30 | 43.33 |
| 8 | 4 | 30 | 40.00 |
| 7 | 8 | 35 | 42.86 |
| 5 | 4 | 14 | 64.29 |
| 18 | 5 | 38 | 60.53 |
| 4 | 9 | 35 | 37.14 |
| 4 | 6 | 30 | 33.33 |
| 3 | 6 | 30 | 30.00 |
| 5 | 8 | 32 | 40.63 |
| BT Discovered Devices | Counted Number of Persons in Station | Percentage of Discoverable Persons [%] |
|---|---|---|
| 25 | 80 | 31.25 |
| 14 | 60 | 23.33 |
| 18 | 65 | 27.69 |
| 2 | 4 | 50.00 |
| 5 | 20 | 25.00 |
| 6 | 20 | 30.00 |
| 7 | 25 | 28.00 |
| 12 | 30 | 40.00 |
| 14 | 41 | 34.15 |
| 17 | 50 | 34.00 |
| 7 | 23 | 30.44 |
| 16 | 63 | 25.39 |
| Distance to AP [m] | Measured Distance to AP [m] | Signal Strength [−dBm] | Wi-Fi Speed [Mbps] | Observations |
|---|---|---|---|---|
| 0.02 | 0.04 | 9 | 65 | LoS |
| 0.5 | 0.99 | 38 | 65 | LoS |
| 1 | 1 | 36 | 65 | LoS |
| 1.5 | 1.48 | 41 | 65 | LoS |
| 2 | 1.94 | 40 | 65 | LoS |
| 2.5 | 2.58 | 46 | 65 | LoS |
| 3 | 2.92 | 47 | 65 | LoS |
| 3.5 | 3.22 | 51 | 65 | LoS |
| 4 | 3.94 | 50 | 65 | LoS |
| 4.5 | 4.59 | 54 | 65 | LoS |
| 5 | 7.85 | 56 | 65 | LoS |
| 5.5 | 7 | 54 | 65 | LoS |
| 6 | 55.61 | 63 | 65 | NLoS |
| Distance to AP [m] | Measured Distance to AP [m] | Signal Strength [−dBm] | Wi-Fi Speed [Mbps] | Observations |
|---|---|---|---|---|
| 0.02 | 0.14 | 21 | 86 | LoS |
| 0.5 | 0.54 | 33 | 86 | LoS |
| 1 | 0.65 | 34 | 86 | LoS |
| 1.5 | 1.15 | 40 | 86 | LoS |
| 2 | 2 | 44 | 86 | LoS |
| 2.5 | 2.48 | 42 | 86 | LoS |
| 3 | 3.2 | 44 | 86 | LoS |
| 3.5 | 3.48 | 58 | 86 | LoS |
| 4 | 4.24 | 51 | 86 | LoS |
| 4.5 | 4.38 | 56 | 86 | LoS |
| 5 | 5.43 | 53 | 86 | LoS |
| 5.5 | 7.45 | 57 | 86 | LoS |
| 6 | 10.24 | 59 | 86 | NLoS |
| Distance to AP [m] | Time [ms] | Avg. RTT [ms] | Maxdev RTT [ms] | Observations |
|---|---|---|---|---|
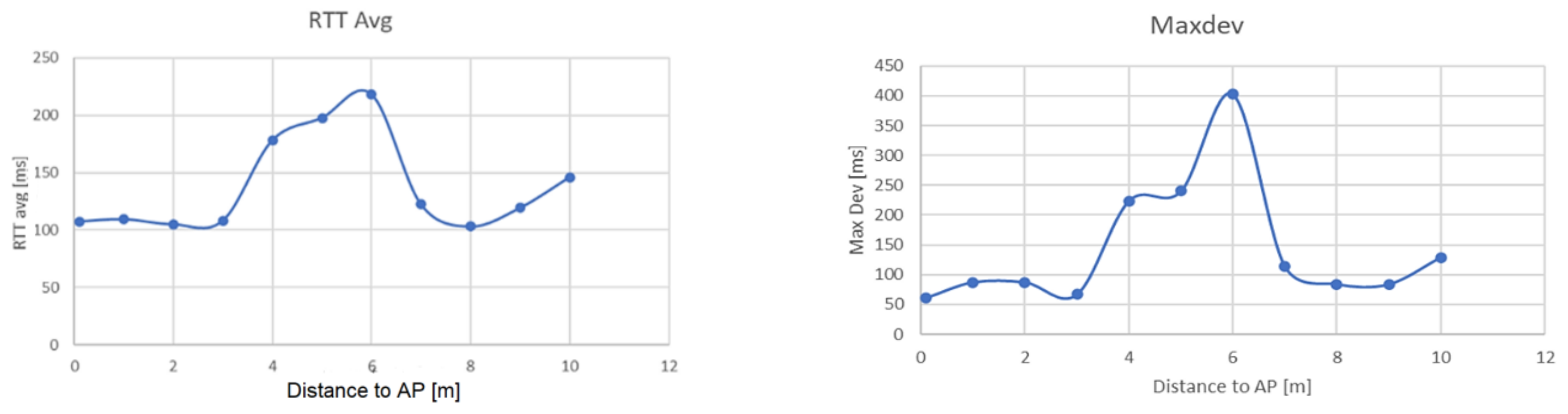
| 1 | 58,999 | 107.545 | 61.204 | LoS |
| 2 | 59,917 | 109.593 | 87.345 | LoS |
| 3 | 59,074 | 105.076 | 87.154 | LoS |
| 4 | 59,972 | 108.297 | 66.909 | LoS |
| 5 | 58,948 | 178.239 | 223.895 | LoS |
| 6 | 59,920 | 197.794 | 240.098 | LoS |
| 7 | 59,912 | 218.362 | 402.759 | LoS |
| 8 | 59,839 | 122.5 | 114.177 | NLoS |
| 9 | 59,883 | 103.148 | 84.001 | NLoS |
| 10 | 60,079 | 119.444 | 83.826 | NLoS |
| 11 | 59,974 | 146.09 | 128.769 | NLoS |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Minea, M. An Experimental Assessment of People’s Location Efficiency Using Low-Energy Communications-Based Movement Tracking. Sensors 2022, 22, 9025. https://doi.org/10.3390/s22229025
Minea M. An Experimental Assessment of People’s Location Efficiency Using Low-Energy Communications-Based Movement Tracking. Sensors. 2022; 22(22):9025. https://doi.org/10.3390/s22229025
Chicago/Turabian StyleMinea, Marius. 2022. "An Experimental Assessment of People’s Location Efficiency Using Low-Energy Communications-Based Movement Tracking" Sensors 22, no. 22: 9025. https://doi.org/10.3390/s22229025