1. Introduction
Integrated sensing and communications (ISAC) has attracted extensive attention in the radar and communications community [
1,
2,
3,
4,
5,
6,
7,
8]. A key benefit of ISAC is that it can greatly improve cost, energy, and spectral efficiency of wireless systems that require both sensing and communications functions [
9]. While there are several ways of realizing ISAC, as reviewed in [
10,
11], a relatively easy way is to add a sensing receiver to an existing communication system and perform sensing by reusing the communication waveforms. We refer to this ISAC methodology as the communications-enabled sensing (CES) and focus on it in this work. Interested readers are referred to [
12] for a review of CES.
Orthogonal frequency-division multiplexing (OFDM) and its variants, e.g., DFT-spread OFDM (DFT-S-OFDM), have been widely studied for CES. In [
13], OFDM CES is considered, with a focus on evaluating the impact of radar antenna setups on common communication metrics. Before the work of [
13], OFDM radar was extensively studied without considering data communications in general [
14]. The ambiguity functions of OFDM radars were intensively studied as well [
15,
16,
17,
18,
19,
20].
A milestone CES method was developed in [
21], referred to as the classical OFDM sensing (COS). Using a coherent synchronised transceiver, COS removes the cyclic prefix (CP) of each OFDM symbol in the echo signal. Then, it transforms the symbols into the frequency domain, where the communication data symbols modulated onto sub-carriers are removed through point-wise division (PWD). Afterwards, COS performs inverse discrete Fourier transforms (IDFTs) along the sub-carrier dimension and discrete Fourier transforms (DFTs) over the symbol dimension, resulting in a range-Doppler map (RDM).
COS has been widely used in the past decade and has become a mainstream for OFDM sensing, particularly in automotive applications [
7,
8,
22,
23,
24,
25,
26,
27,
28,
29,
30]. Recent OFDM sensing works, which are based on COS, mainly seek to develop new techniques for improving the RDM quality, such as noise level. The work in [
23] increased the overall baseband bandwidth of the OFDM by introducing the stepped carrier techniques. This, hence, improves the range resolution. The work in [
24] employed random stepped carriers and the compressed sensing methods to obtain high-resolution RDMs. The works reviewed above typically ignore the intercarrier interference (ICI). In contrast, the work in [
25] considered the impact of ICI on OFDM sensing and developed a novel signalling, which repeats the same OFDM symbol over (slow-)time, to facilitate the estimation and suppression of ICI.
The phase shift keying was considered in [
21], and hence PWD does not have a noise enhancement issue. However, this issue can be prominent when DFT-S-OFDM is performed. This is because signals modulated onto sub-carriers in DFT-S-OFDM can be noise-like and centred around zero. To relieve noise enhancement, the work in [
31] proposed to replace PWD with the point-wise product (PWP) and followed the other steps of COS. While COS and PWP-COS fully comply with the underlying communication system, their ranging capability is known to be restricted by the CP duration.
Such restriction is relieved by a unified sensing framework (USF) developed in [
32] (the unification is based on the feature that the sensing framework can be applied to OFDM, DFT-S-OFDM, and other OFDM-like waveforms, e.g., the orthogonal time-frequency space (OTFS), even with reduced CP (RCP). RCP-OTFS adds a single CP for the signal block that may be equivalent to multiple OFDM symbols. COS and many of its variants cannot work for RCP waveforms). USF segments a block of sensing echo signal as per sensing needs and employs virtual CPs to establish a deterministic relation between the transmitted signal and each segmentation of echo signals. A notable feature of USF is that it can sense a target with the sample delay much greater than CP length (provided there is a sufficient link budget). More details of USF will be presented in
Section 2.
However, as illustrated in [
12,
32], USF suffers from a false target issue. Specifically, obvious peaks (much stronger than background noises) are observed at locations different from that of the true target. In a previous work [
33], we intuitively explained the reasons for false targets employing some special cases, and developed a simple expedient solution that can cause a decrease of use signal power and, hence, the detecting probability. In this work, we perform an in-depth investigation to more rigorously unveil the reasons for the false target issue in the USF. Moreover, we will develop more effective solutions to removing false targets without losing the power of useful signals.
Our main contributions are summarised below. We introduce a concise matrix format of USF, which conveniently enables the investigation into the false target issue. We unveil that false targets are mainly caused by the periodic CP signals in the CP-OFDM waveform. We also derive the properties of false targets, including positions and strengths. Accordingly, we develop novel methods, removing the false targets without decreasing the detecting probability of true targets. Simulations are provided to confirm the validity of our analysis and the effectiveness of the proposed solution.
The rest of the paper is arranged as follows.
Section 2 establishes the signal model.
Section 3 first reviews USF and another classical OFDM sensing method and then illustrates the false target problem.
Section 4 investigates the reasons for and features of false targets.
Section 5 develops two novel methods for handling false targets. Simulation results are presented in
Section 6, and conclusions are given in
Section 7.
2. Signal Model
This section presents the signal model of OFDM-ISAC. Consider that a communication node is turned into an ISAC node by adding a sensing receiver. Sensing is performed using the echo signals resulted from the communication-transmitted signals. Being co-located, the communication transmitter and sensing receiver are assumed to be fully synchronised. It is also reasonable to assume that the sensing receiver has a copy to the time-domain communication-transmitted signals. It is further assumed that some proper full-duplex techniques are applied such that self-interference, i.e., the signal leaking from the transmitter to receiver, can be ignored. As for waveform, we employ OFDM with regular CP (i.e., one per symbol), which is widely used in modern communication systems.
We consider
M consecutive OFDM symbols, each having
N sub-carriers. Let
Q denote the CP length. After CP is added, the time-domain signal matrix can be given by [
34]
where each column of
represents an OFDM symbol,
denotes CP, and
is often referred to as the essential signal part of each OFDM symbol.
Reshaping
into a vector by stacking its columns, we obtain
At the communication transmitter,
is transmitted after being processed by a radio frequency (RF) chain. The RF signal will hit some targets and partially return to the sensing receiver. After some RF processing, the digital signal at the receiver can be given by [
11]
where
denotes the scattering coefficient, ⊙ denotes the point-wise product, and
denotes a noise vector with independent entries conforming to the same centred complex Gaussian distribution. Moreover,
L denotes the sample delay,
is the total number of samples in a block,
denotes the first
rows of the
I-dimensional identity matrix,
accounts for the Doppler impact,
takes the
i-th entry of the enclosed vector,
denotes the Doppler frequency, and
the sampling time. A single target is modelled here for clarity. The multitarget case will be considered in later algorithm development and simulation.
We emphasise that, in the considered ISAC, sensing is performed based on the echo signal at the receiver, i.e.,
, and the known copy of the communication-transmitted signals, i.e.,
. That is, the ISAC scheme discussed here does not make any changes to the communication waveform. Moreover, we perform ISAC based on the predominant OFDM communication system that is widely under use in WiFi, LTE, and 5G. ISAC employing more advancing OFDM systems, such as the real-signal DHT-OFDM [
35], NOMA-TDS-OFDM [
36,
37], and the precoded IM-OFDM-SS [
38], can be an interesting future work.
3. Problem Statement
In this section, we briefly review USF [
32] and then illustrate the false target issue. Unlike in the original work using the scalar form for developing the algorithm, we introduce a more concise matrix form here. The new matrix form will also benefit the analysis to be performed in
Section 4. To start with, we define the following operator, reshaping a vector into a matrix.
Definition 1. The operator reshapes the vector into a matrix of size , where each column has x number of entries and starts from the -th entry in . Here, takes flooring, C denotes the dimension of , x is a positive integer (PI), and y can be a PI or zero.
Note that, if
y is nonzero, adjacent columns of the resulted matrix have overlapping entries. To help understand the operator, let us look at an example. Given
,
and
, respectively, result in
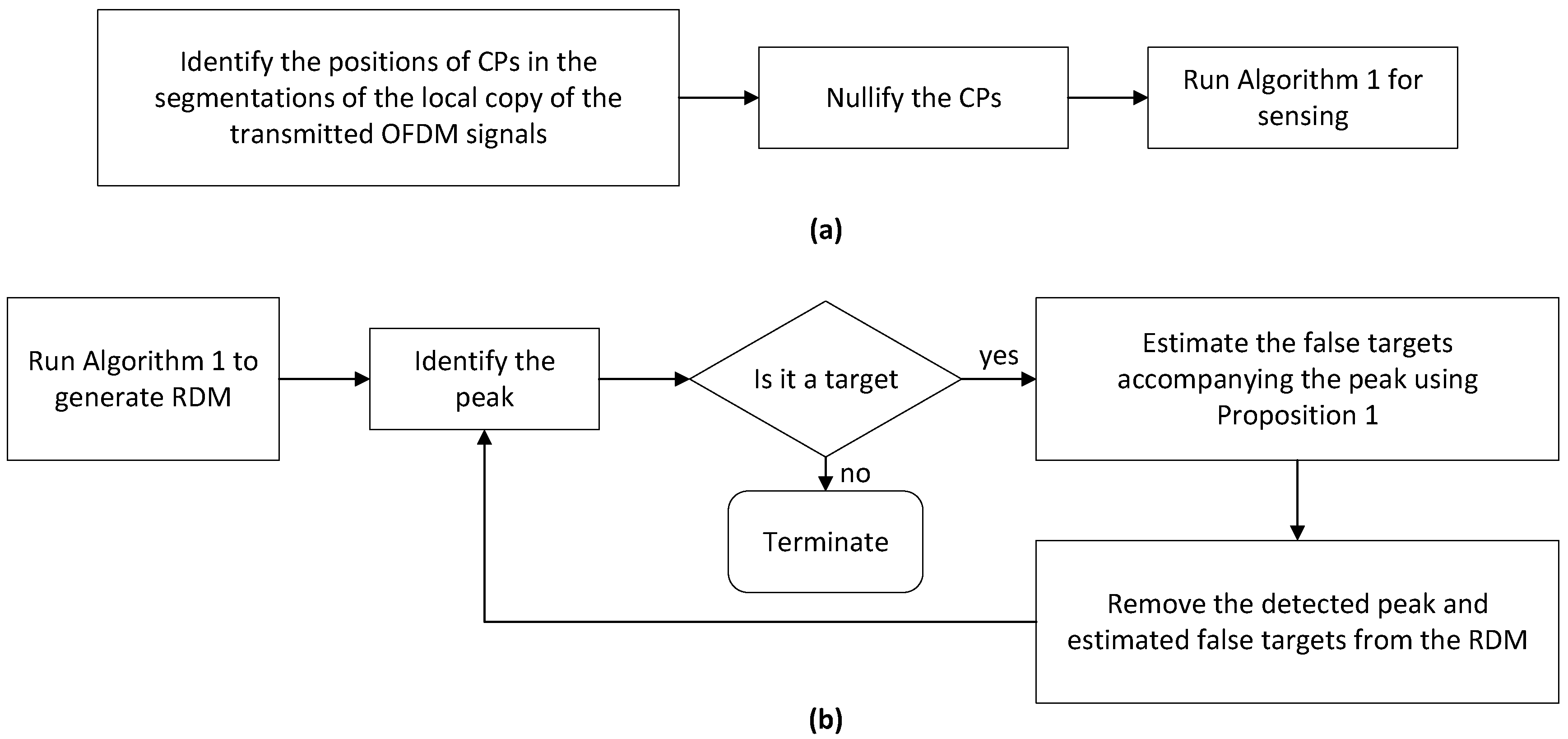
Based on the signal model given in
Section 2, USF [
32] is summarised in Algorithm 1. As performed in Step 1, the echo signal vector
is reshaped into a matrix by
, where each symbol has
samples and adjacent symbols are overlapped by
samples. Note that
here can be different from
, the length of the original OFDM symbol (with CP). In Step 2, the communication-transmitted signal,
given in (
2), is reshaped into a matrix by
. We refer interested readers to Figure 5 in [
12] for an intuitive illustration of the reshaping performed above. As a result of Steps 1 and 2, each column of
, as obtained in Step 3, contains a cyclically shifted version of the corresponding column in
, as obtained in Step 2. The shifting amount is linked with the target delay. Therefore, each column of
, as obtained in Step 4, is the point-wise product (PWP) between the same column of
, as obtained in Step 5, and the range steering vector of the target.
| Algorithm 1 Unified sensing framework (USF) [32]. |
| 1. Reshape by , leading to ;
|
|
2. Reshape by , leading to ; |
| 3. Add the last rows of onto its first ones and remove the last rows, leading to ; |
| 4. Take the DFT of the columns of , giving ; |
| 5. Take the DFT of the columns of , giving ; |
| 6. Calculate the point-wise product (PWP) between and , yielding , where denotes conjugate; |
| 7. Take the IDFT of the columns of and then the DFT of the rows, yielding an RDM . |
A point-wise division (PWD) between
and
can remove the communications information, making the extraction of sensing target parameters independent of communications information. However, when the entries of
approach zero, the division can lead to the noise enhancement issue. To relieve the issue, it was proposed in [
31] to replace PWD with PWP. As proved in our previous work [
32], PWP theoretically achieves higher signal-to-interference-plus-noise ratio (SINR) than PWD, given high to medium noise power; the threshold for determining the noise level is also derived therein. This makes PWP more desirable in practice. Hence, we mainly consider PWP here.
Step 7 of Algorithm 1 performs a two-dimensional Fourier transform of the PWP result, leading to the so-called range-Doppler map (RDM). Here, the discrete Fourier transform (DFT) along the symbol domain turns a Doppler steering vector into a discrete Doppler spectrum. The inverse DFT (IDFT) over sub-carriers turns an amplitude-weighted range steering vector into a discrete range spectrum. As a result of PWP in Step 6, the amplitude weights are the squared amplitudes of communications signals over sub-carriers.
If a constant-modulus constellation, such as phase shift keying (PSK), is used, the amplitude weights become all ones. The discrete range spectrum can be depicted using a discrete sinc function. In contrast, if signals carried by sub-carriers have nonconstant amplitudes, the amplitude weighting on the range steering vector can make the discrete range spectrum different from a sinc function in shape. However, the impact of the weighting is not deterministic, as signals on sub-carriers are generally random in actual communications. It is also this randomness that prevents the sidelobe level in the RDM being constructively accumulated. We refer interested readers to [
32] for a more elaborate analysis on the impact of the above amplitude weighting.
The classical OFDM sensing (COS) can be seen as a special case of USF and is summarised in Algorithm 2. COS fully complies with the underlying data communications. The echo signal vector
is reshaped first in Step 1. However, different from Step 1 of Algorithm 1, the length of each segmentation is
, identical to the length of an OFDM symbol (with CP). Different from Step 3 of Algorithm 1 creating virtual CPs, Step 2 of Algorithm 2 removes the first
Q samples per symbol, as performed in OFDM communication receivers. Note that
in Step 4 is the original frequency-domain communication signals. Thus, COS need not reshape communication-transmitted signals, as required in USF.
| Algorithm 2 Classical OFDM sensing (COS) [21]. |
| 1. Reshape by , leading to ; |
| 2. Remove the first Q rows of , leading to ; |
| 3. Take the DFTs of the columns of , giving ; |
| 4. Calculate the PWP between and , yielding ; |
| 5. Take the IDFT of the columns of and then the DFT of the rows, yielding an RDM . |
Without fully complying with the communications system, USF can achieve more flexible sensing than COS, through configuring
,
, and
in Algorithm 1. Note that
is the length of a virtual CP created by the sensing receiver and can be configured based on sensing needs. More specifically, if the maximum sample delay is
L, we can set
to satisfy this requirement. In contrast,
is generally required in COS [
21] and its variant [
31], where
Q is the original CP length for communications. We remark that the value of
can affect the signal-to-interference-plus-noise ratio (SINR) in the obtained RDM. This is detailedly analysed in [
32]. Here, we shall mainly focus on the false target issue that has not been effectively solved.
Given the maximum measurable Doppler frequency requirement , we can set such that . In contrast, COS and many of its variants have their maximum measurable Doppler frequency limited to , and hence they will suffer from Doppler ambiguity if .
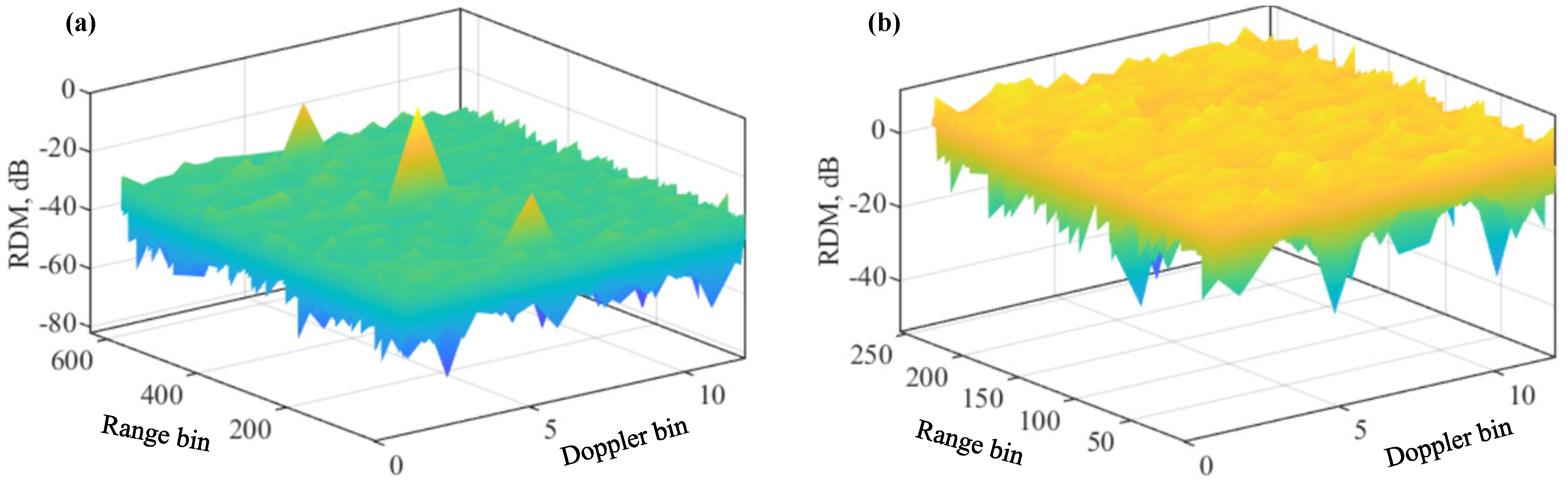
Next, we provide a set of simulation results to demonstrate the superiority of USF over COS in extended sensing capability, meanwhile illustrating the false target issue of USF. Simulation parameters are summarised in
Table 1. The target delay is much larger than the CP length, which is purposely set to show the extended sensing capability of USF over COS.
Figure 1a,b illustrate the RDMs of USF and COS, as obtained by running Algorithms 1 and 2, respectively. We see that COS fails to generate a normal RDM for target detection and estimation, while USF yields a typical RDM with a peak at the true target location. Note that the two algorithms are performed employing the same communication signals and echo signals. We note that all steps in the two algorithms are solely performed at the sensing receiver side without making changes to the communication transmitter.
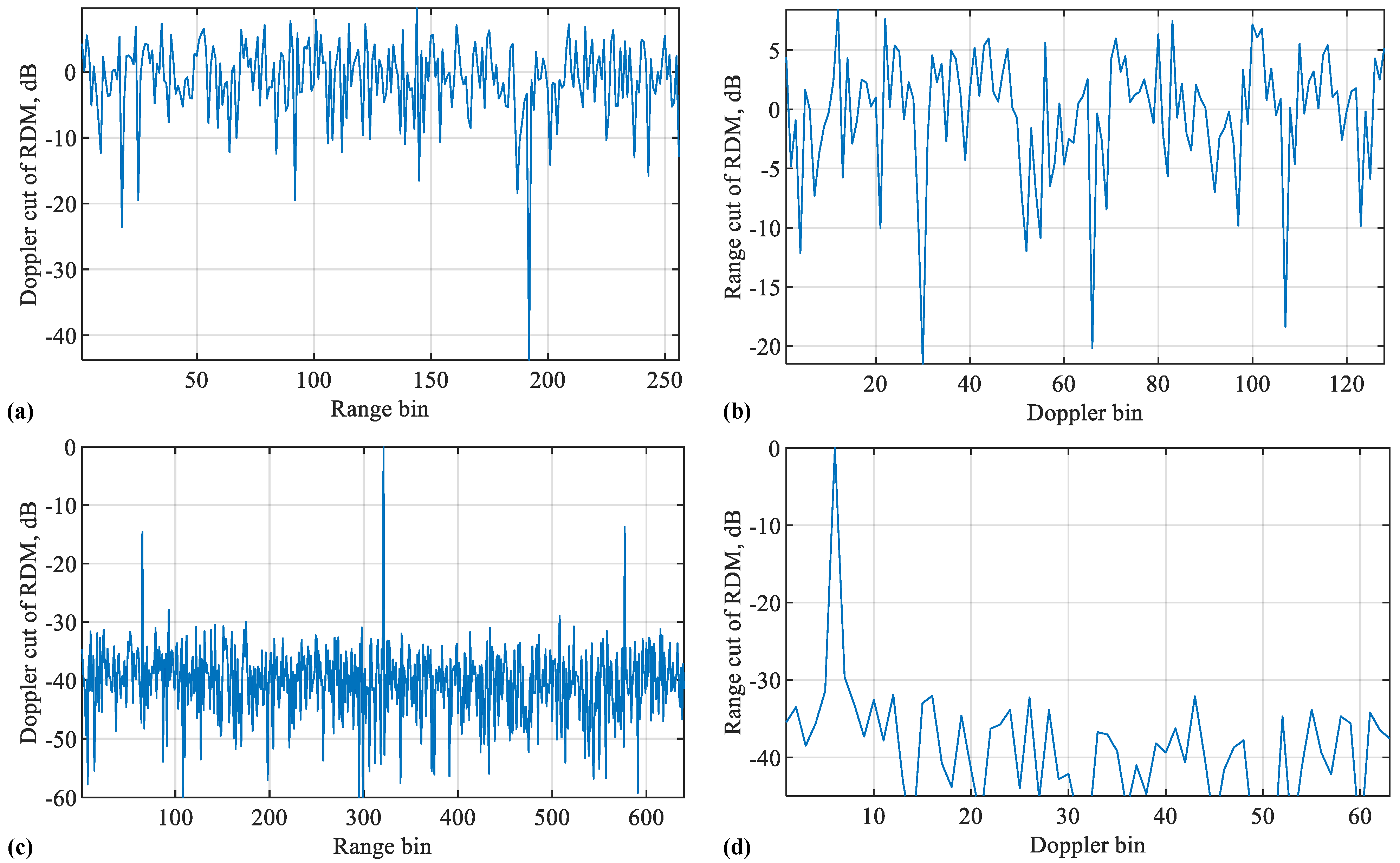
Figure 2 plots the range and Doppler cuts of the RDMs obtained in
Figure 1. Given the sample delay
, the range bin (in the sensing receiver, each OFDM symbol is uniformly sampled. Each of the sampling times represents a different range increment and is often referred to as a range bin [
39]) index for USF is
L (starting from one here to comply with MATLAB). For COS, since the overall number of samples along the range bin is
N, smaller than
L, a modulo-
N of
L, i.e.,
here, is taken as the range bin index for COS. The Doppler bin (similar to the range bin, the DFT of OFDM symbols at the same range bin leads to the Doppler domain. Each discretisation grid in the Doppler domain is termed as a Doppler bin) index can be calculated as
, where
rounds the enclosed term, “
” is because the index starts from one,
for COS, and
. Here,
is the number of columns of
obtained in Step 1 of Algorithm 1. According to Definition 1, we have
.
From
Figure 2, we see strong peaks in the range and Doppler cuts of the USF-RDM. In contrast, we see noise-like signals over the whole range and Doppler bins in the cuts of the COS-RDM. Given the high peak-to-sidelobe ratio at the true target location, the target can be readily detected employing common detecting algorithms, e.g., the constant false alarm rate (CFAR) detector [
40]. However, from
Figure 2, we also see two false targets around the true one along the range dimension. This problem was noticed in [
32], yet is unsolved. Below, we first investigate the reasons for the false targets and then develop new methods to solve the problem.
6. Simulation Results
In this section, simulation results are provided to validate the effectiveness of the proposed method. First, we continue the scenario given in
Table 1 to illustrate how the proposed methods impact RDMs.
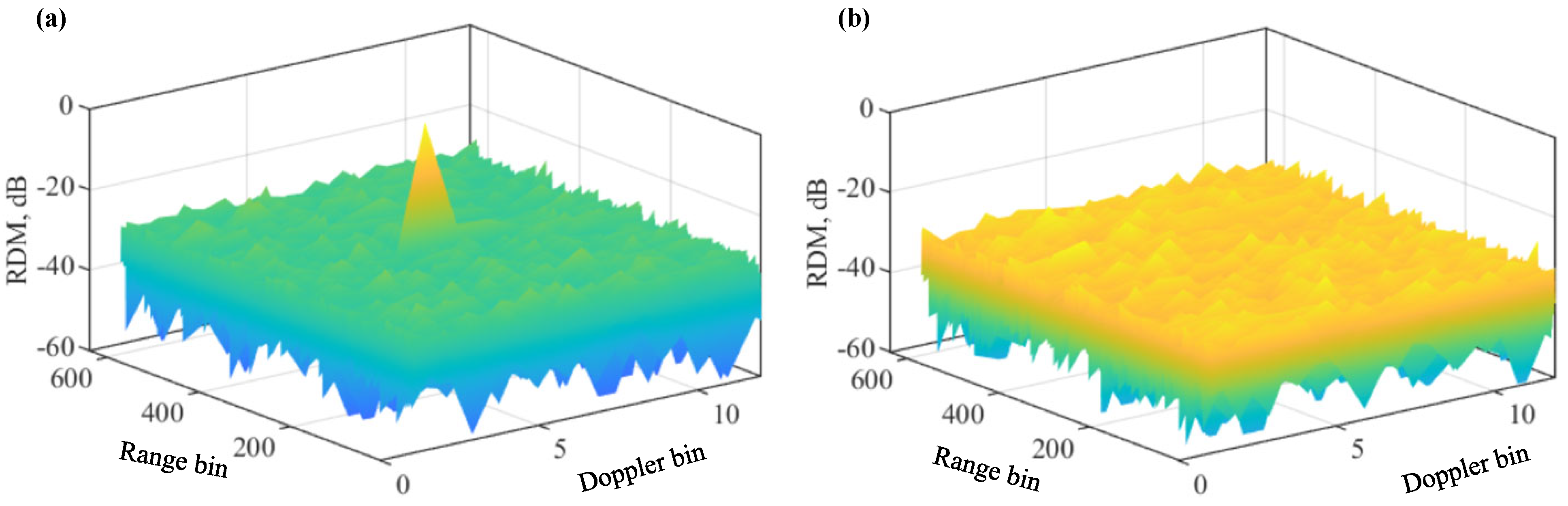
Figure 4a plots the RDM of MUSF given in Algorithm 3, where parameters given in
Table 1 are reused here. We see that, substantially different from USF-RDM in
Figure 1a, the false targets are removed in MUSF-RDM.
Figure 4b plots the RDM after running Algorithm 4. Since the algorithm removes the strongest target sequentially, the residual RDM would be target-free, if the number of targets is known. This is validated by
Figure 4b. We see that the residual RDM is noise-like without obvious target peaks.
Figure 4b also confirms the features of false targets derived in Proposition 1, as false targets are reconstructed based on those features.
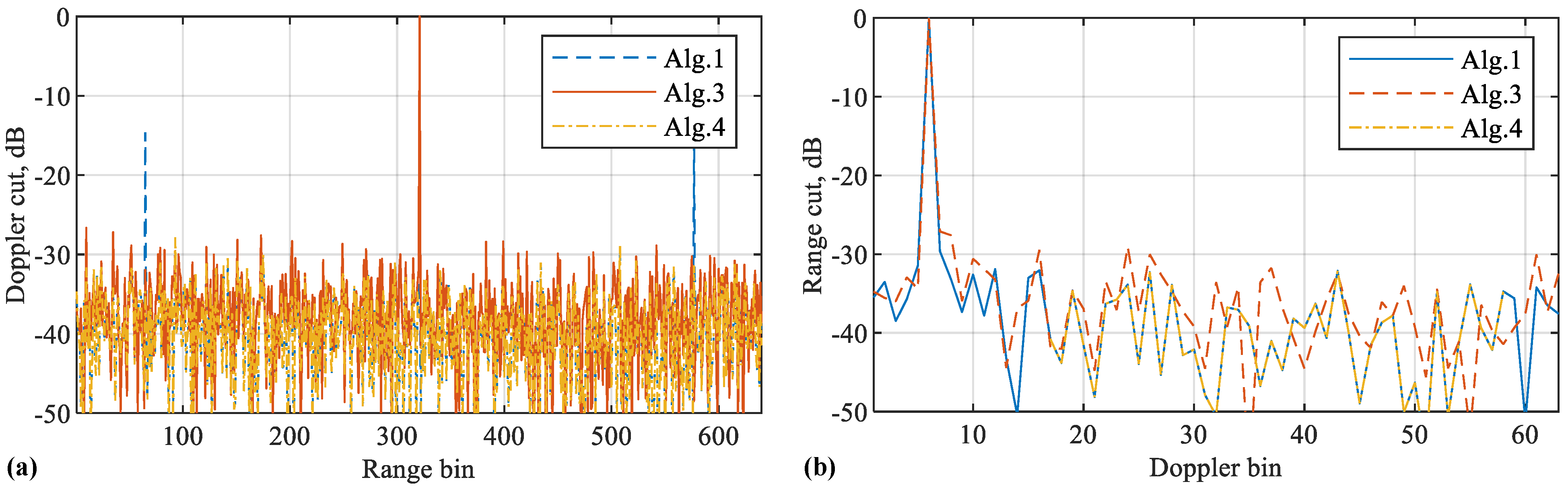
Figure 5 further compares the range and Doppler cuts of different algorithms. From
Figure 5a, we see that the proposed Algorithms 3 and 4 can both remove the false targets. From
Figure 5b, we see that the two algorithms have negligible impacts on the Doppler spectrum. This is consistent with our analysis in
Section 4. Moreover, we can see from
Figure 5a that Algorithm 3 has slightly larger sidelobes than the other two algorithms overall. This is actually caused by the reduced peak magnitude of Algorithm 3. Since the peak magnitude is normalised to one in the figure, the sidelobe level is raised as a result.
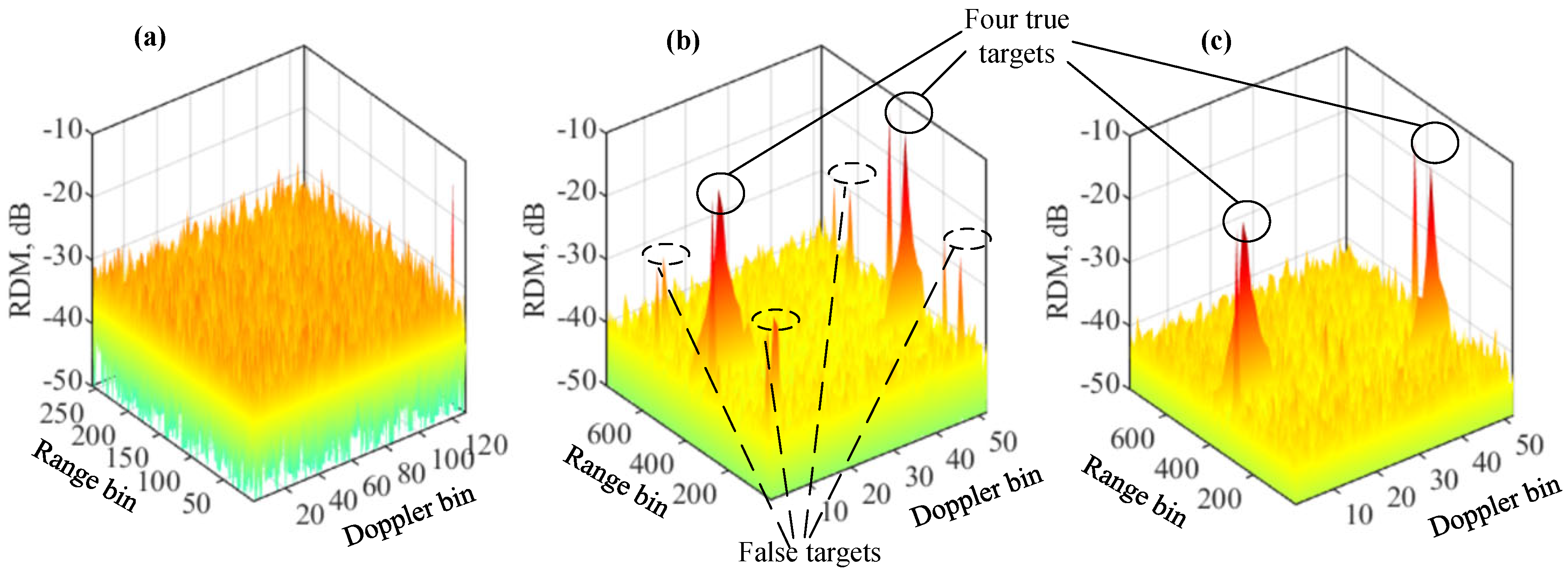
Next, we increase the number of targets to four to validate the proposed methods. With other parameters in
Table 1 fixed, the target delays of the four targets are set as
, and 382. Moreover, their respective Doppler frequencies are
Hz,
Hz,
Hz, and
Hz. These are randomly generated without any special implications.
Figure 6a plots the RDM obtained by COS, as given in Algorithm 2. We see that the classical COS, as fully complied with the underlying communication system, fails to generate a normal RDM with peaks at the target locations.
Figure 6b plots the RDM of USF, as given in Algorithm 1. Other than the four true targets highlighted, we also see eight false targets (two associated with each true target).
Figure 6c presents the RDM of the modified USF given in Algorithm 3. We see that the false targets are effectively removed.
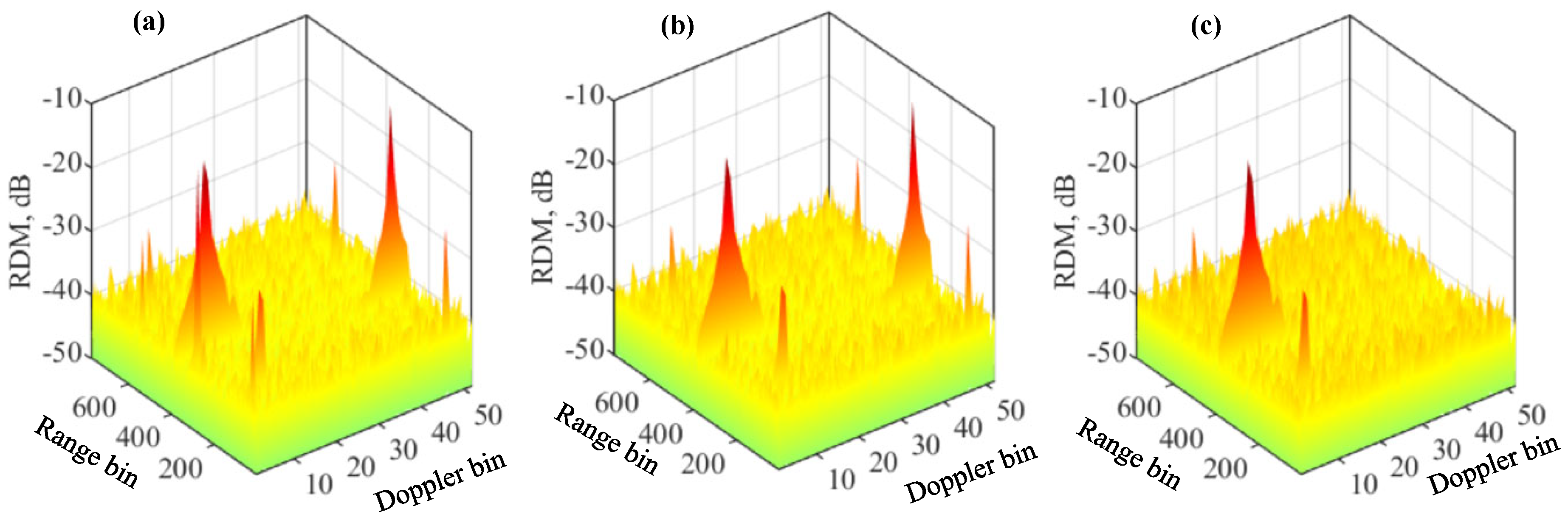
Figure 7 plots the updated RDMs in the first three iterations of Algorithm 4. Note that with four targets set, the algorithm has four iterations in total. From the three RDMs, we can see that each iteration is able to remove one true target along with its associated false targets. This again validates the correctness of our analysis of the features of the false targets. Moreover, this manifests the effectiveness of Algorithm 4 in constructing the RDM of a target and removing it from the overall RDM.
Next, we employ the common metrics to further highlight the impacts of false targets and the proposed methods on sensing. In particular, we perform CA-CFAR based on the RDM obtained under different methods, and observe the detecting probability as well as the false alarm rate (when there is no target but the radar detection reports a target, a false alarm happens. The average number of false alarms per unit time is defined as the false alarm rate [
39]) against the signal-to-noise ratio (SNR). We also consider single- and multitarget cases. In both cases, target delay, velocities, and amplitudes are randomly generated over
independent trials. Moreover, the target delay is in the range of
, where
is the original OFDM length. The target speed is in the range of
m/s. Further, the target amplitude conforms to a complex Gaussian distribution with the mean of one and the variance of
.
A key parameter of CA-CFAR is the expected false alarm rate. It is used in computing the detecting threshold. Here, we set the expected false alarm rates for Algorithms 1–4 as , , , and , respectively. In general, the smaller the value, the greater the detecting threshold would be. As a result, the detecting probability would be reduced.
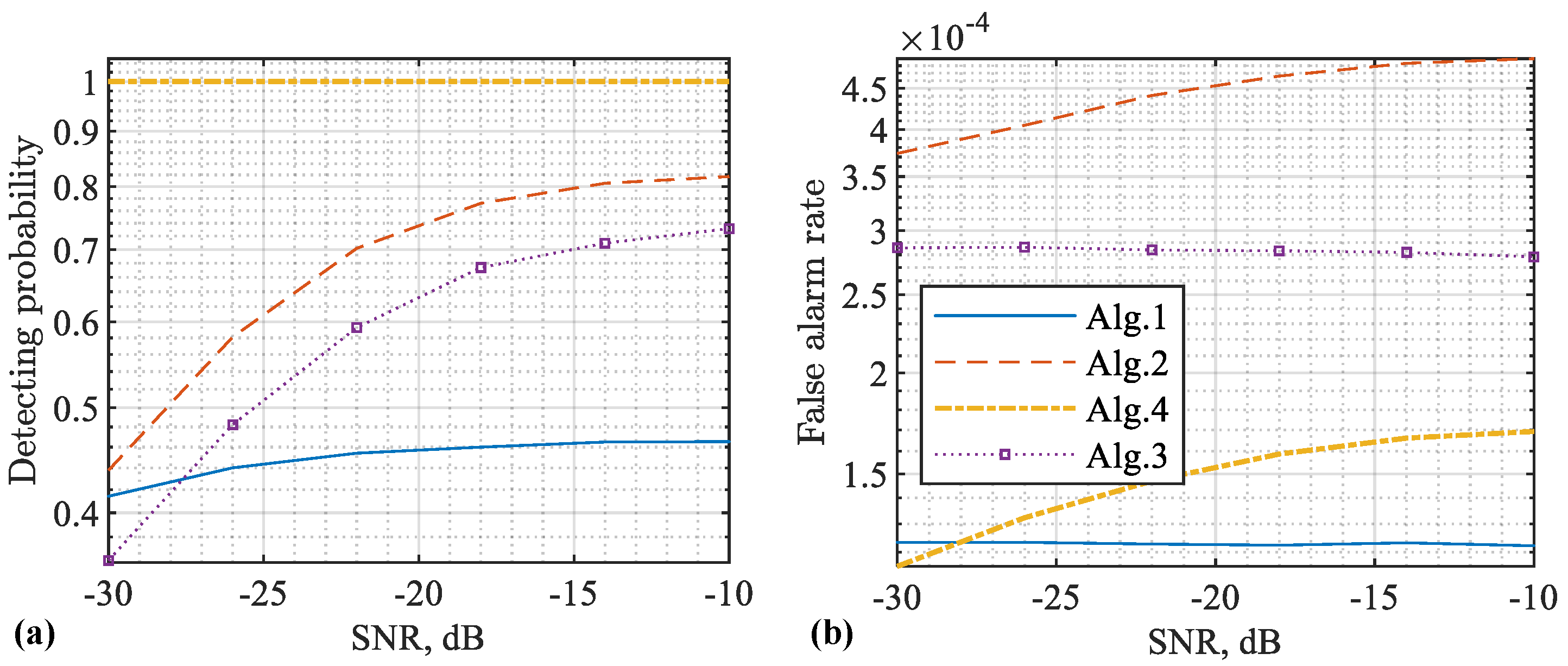
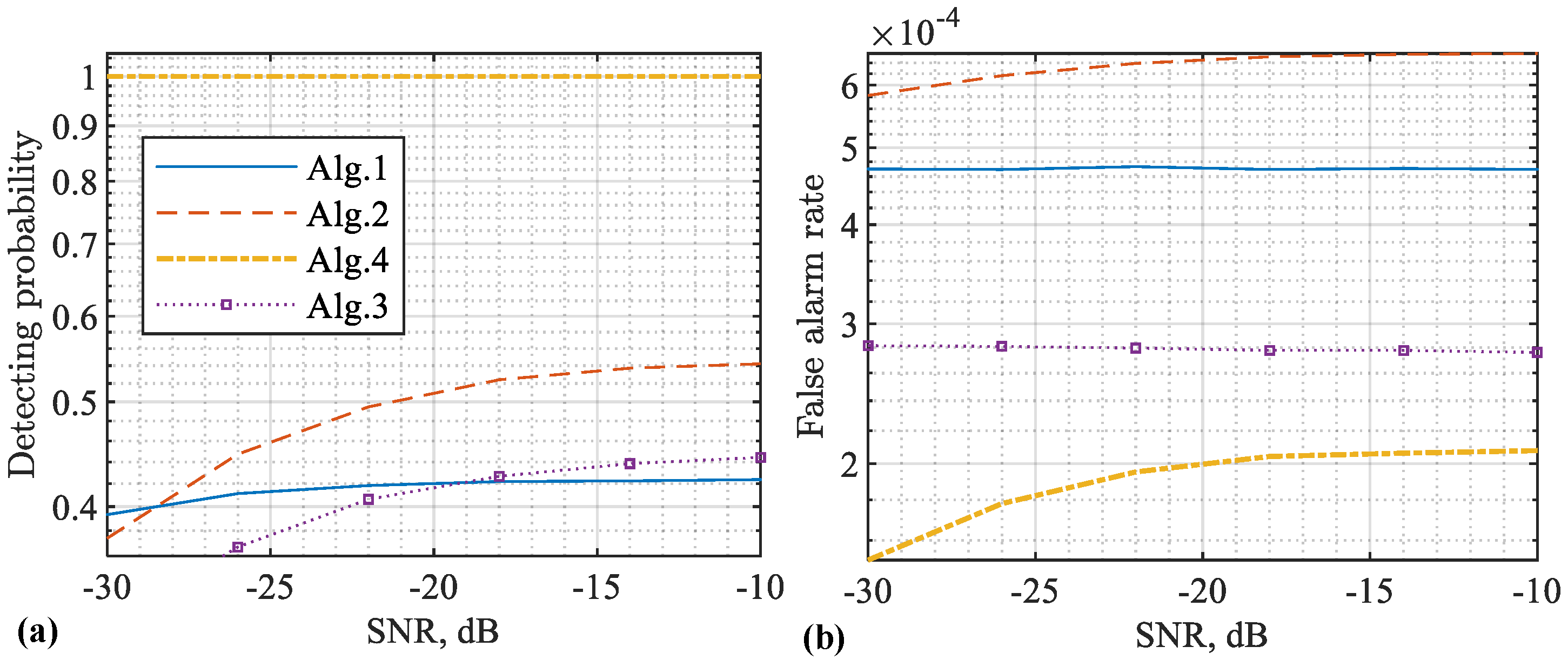
Figure 8 plots the detecting performance achieved based on the RDMs obtained using different methods. From
Figure 8a, we see that Algorithm 4 achieves the maximum detecting probability. This is mainly because we simply detect the maximum peaks as targets without applying threshold detection, as do the other three algorithms. However, identifying the maximum peak as target is enabled by our proposed Algorithm 4. It effectively remove the impacts of stronger targets and their associated false targets on weaker ones.
From
Figure 8a, we also see that COS basically fails to detect targets in the whole SNR region. Moreover, we see that Algorithm 1 always achieves higher detecting probabilities than Algorithm 3. This reveals a disadvantage of Algorithm 3. It indeed prevents the false targets from being generated by nullifying CPs, but it also reduces the processing gains on the true targets due to the signal nullification.
From
Figure 8b, we see that Algorithms 3 and 4, as developed in this work, can reduce the false alarm rate, compared with Algorithm 1, which suffers from false targets. This validates that the proposed algorithms can effectively counteract the impacts of false targets. Moreover, Algorithms 1 and 3 have higher false alarm rate than Algorithm 2, although the former two algorithms actually use a smaller theoretical false alarm rate to calculate the detecting threshold than the third one. This is a consequence of not only false targets but also the virtual CPs introduced in the sensing framework of Algorithm 1. As analysed in [
32], the background noise level can be slightly raised by Algorithm 1 compared with the classical COS given in Algorithm 2. Moreover, there can be a fixed noise floor even when the receiver noise is negligibly weak. All these consequences contribute to the slightly increased false alarm rate of Algorithm 1 and its variants Algorithms 3 and 4.
In parallel,
Figure 8 and
Figure 9 presentthe detecting performance achieved based on different RDMs. From
Figure 9a, we see that Algorithm 4 substantially outperforms the other three algorithms. This is because Algorithm 4 has the mechanism to reduce interference of strong targets on weaker ones. Again, the feasibility of doing so is enabled by our discovery on false target features in this work. From
Figure 9b, we further see that the proposed Algorithms 3 and 4 can effectively reduce the false alarm rate.
Table 2 compares the four algorithms simulated above by highlighting their key features/results. We see that the proposed Algorithms 3 and 4 are able to sense longer distances than the benchmark Algorithm 2 [
21]. We also see that the proposed Algorithms 3 and 4 can remove false targets with lower false alarm rates achieved, as compared with the benchmark Algorithm 1 [
32]. Moreover, we see that the proposed Algorithm 4 not only reduces false alarm rate but also maintains a high detecting probability, while Algorithm 3 reduces the false alarm rate at the cost of decreasing its detecting probability. In addition, comparing the first and last rows in the table, we see that Algorithm 4 is able to reduce the false alarm rate by over 50% of that achieved by Algorithm 1.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}