

Waste Management with the Use of Heuristic Algorithms and Internet of Things Technology
 , , and
, , and
Abstract
:1. Introduction
2. Literature Review
- -
- programs and models used to determine the best locations of waste containers [6],
- -
- sensor technology where waste information is collected from the smart bin and transmitted to an online platform where citizens can access and check the availability of the compartments scattered around a city [21],
- -
- analysis of the technology used to support the transmission of the filling level of waste containers [22].
3. Materials and Methods
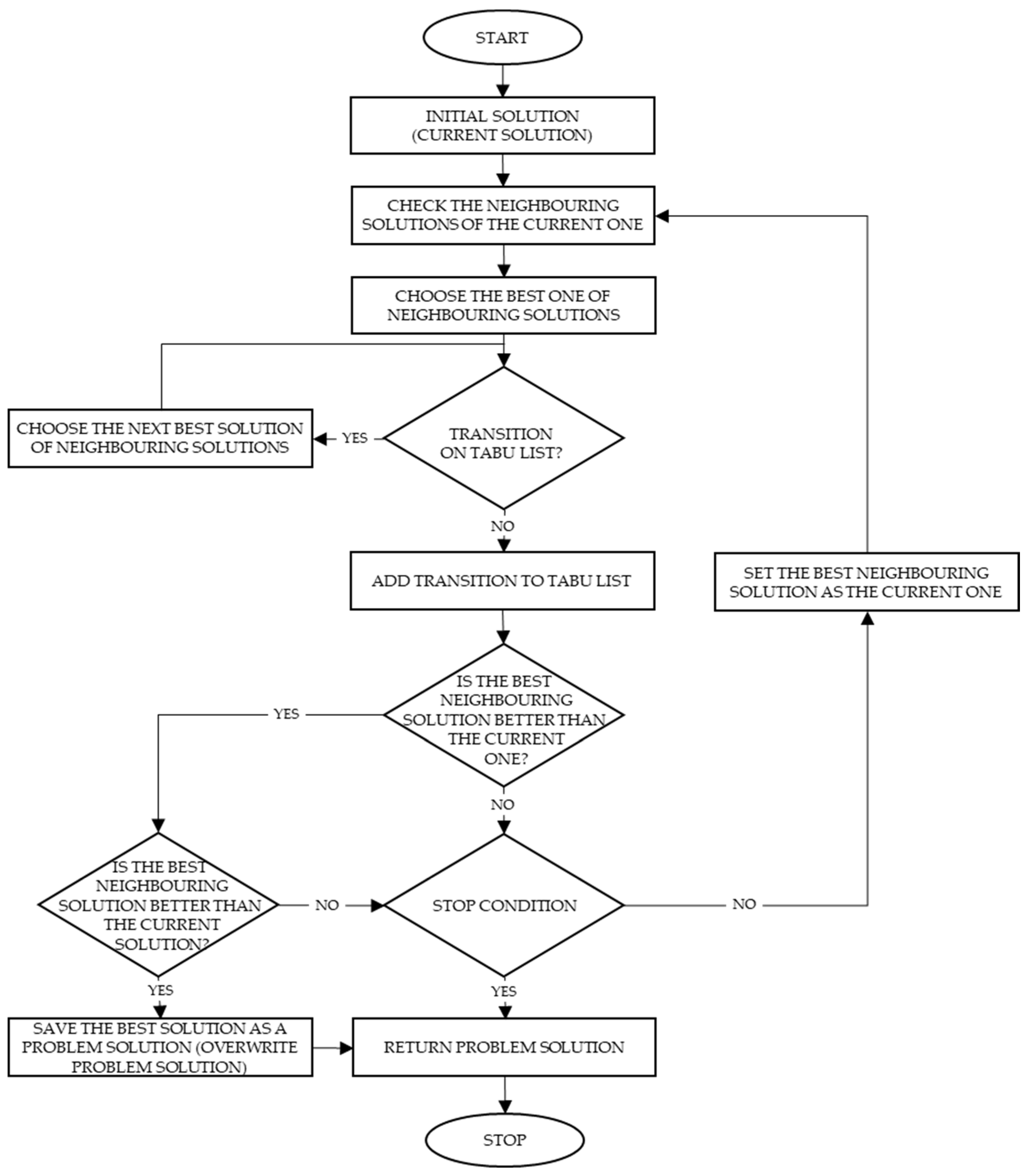
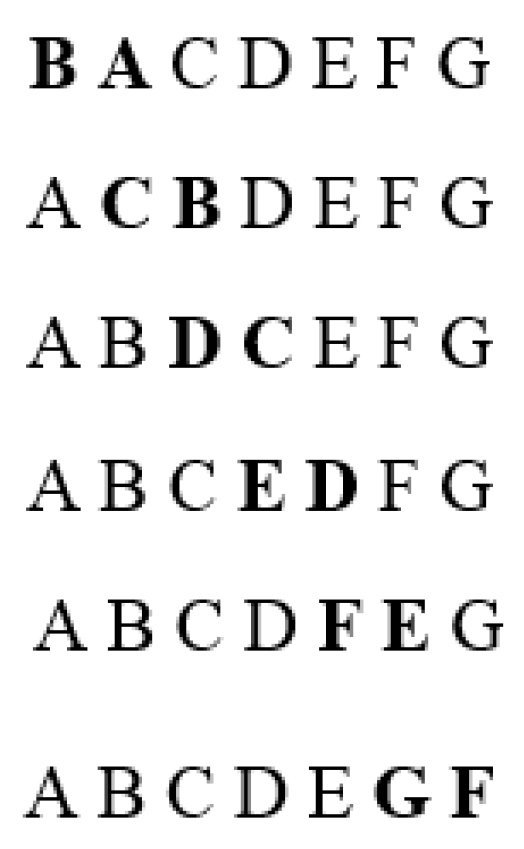
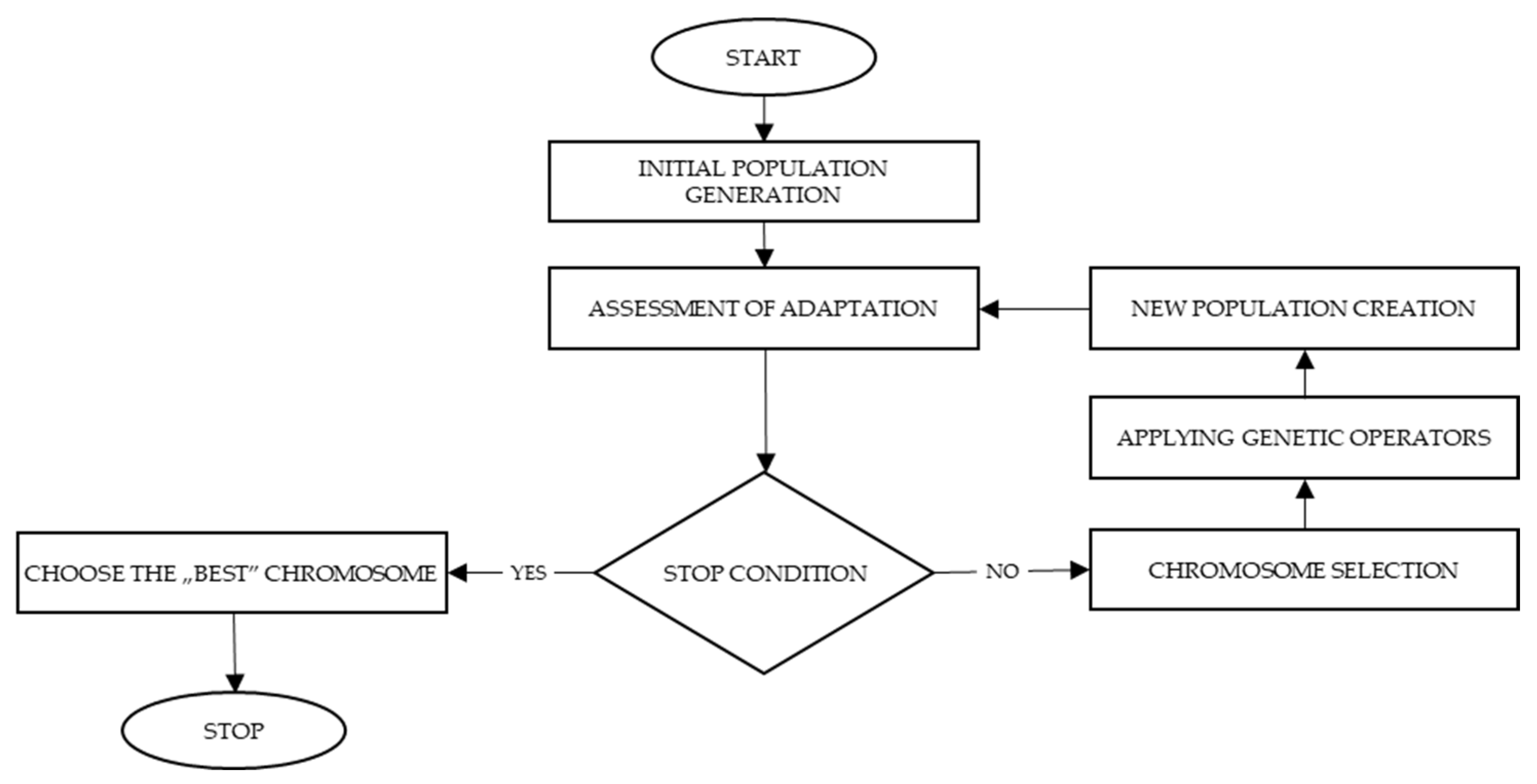
3.1. Heuristic Methods Used in Waste Management Improvement
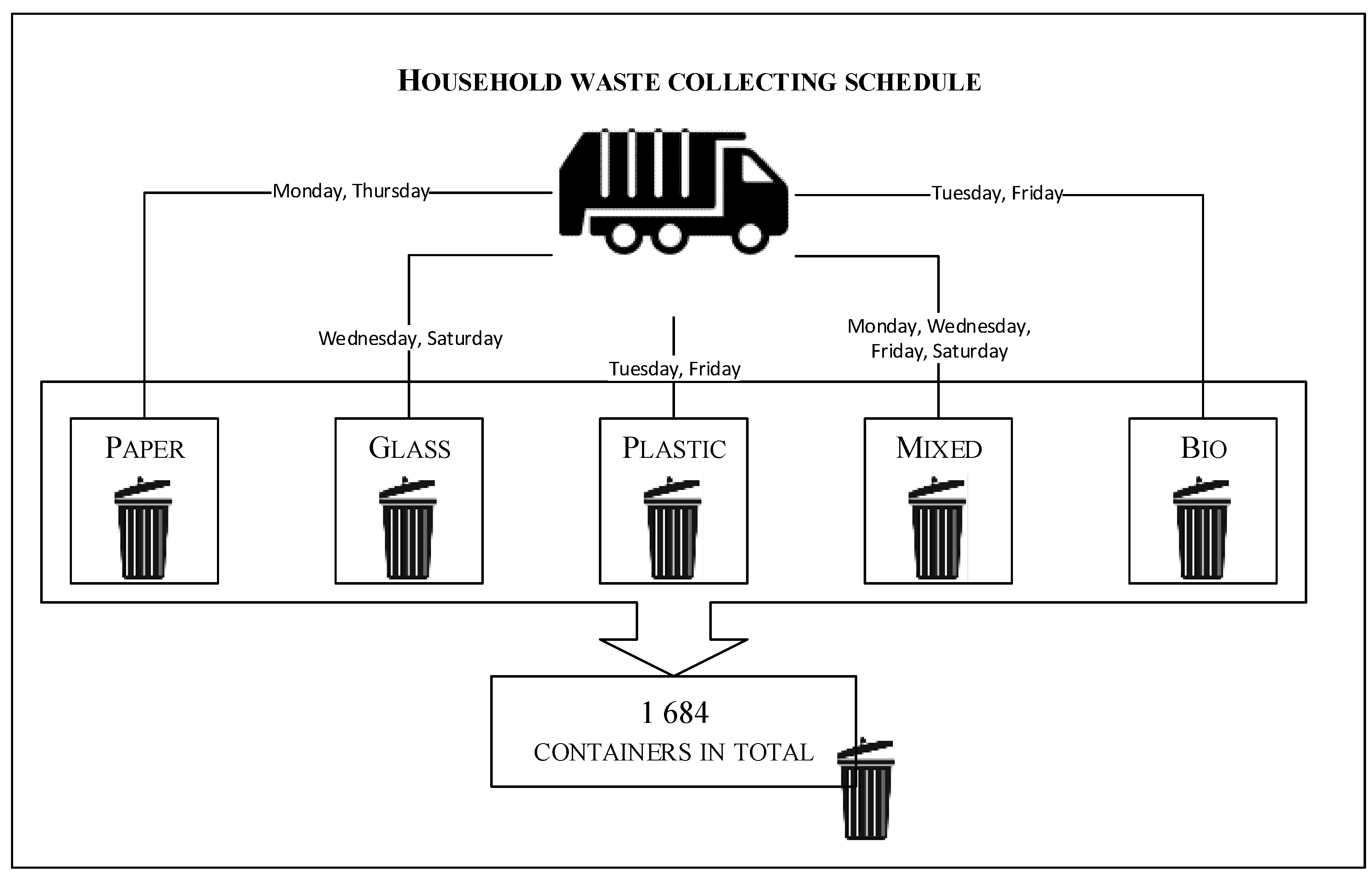
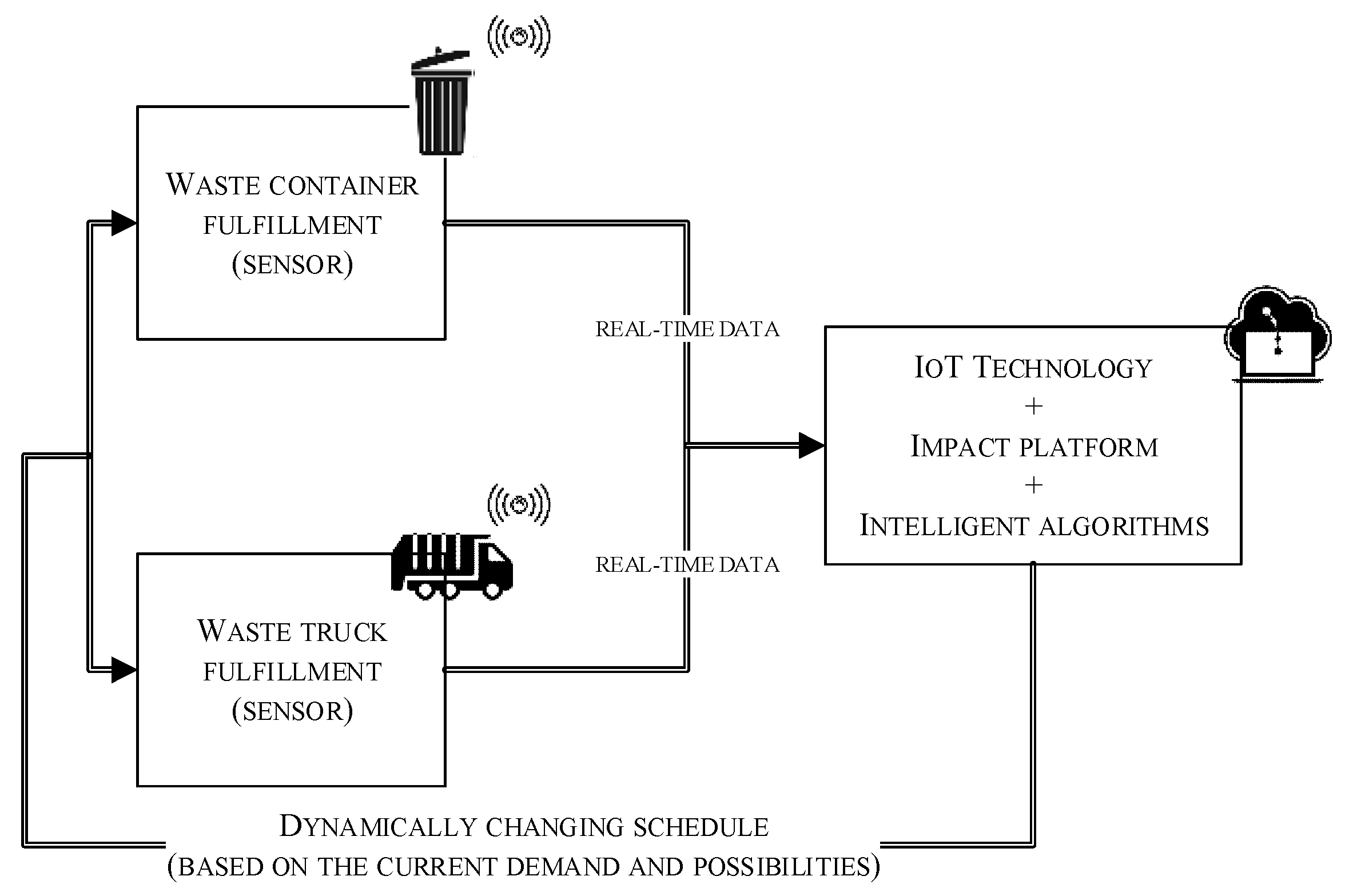
3.2. Waste Management Process
3.3. The Solution to the Problem
- A test M2M SIM card and private LTE network;
- A Wi-Fi module that the sensor is equipped into and a standard Wi-Fi network.
3.4. Waste-Container-Emptying System Prototype
4. Results and Discussion
- -
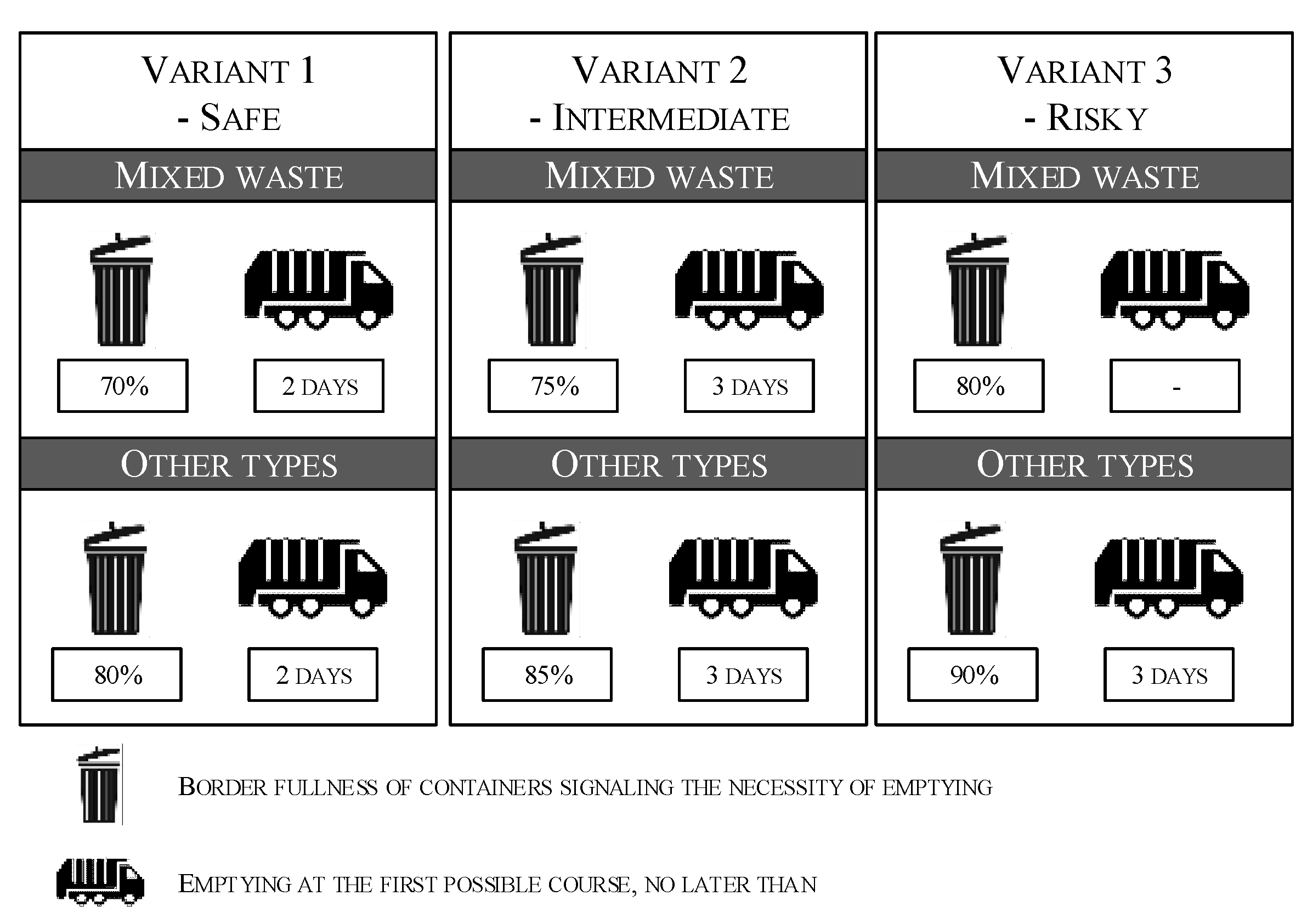
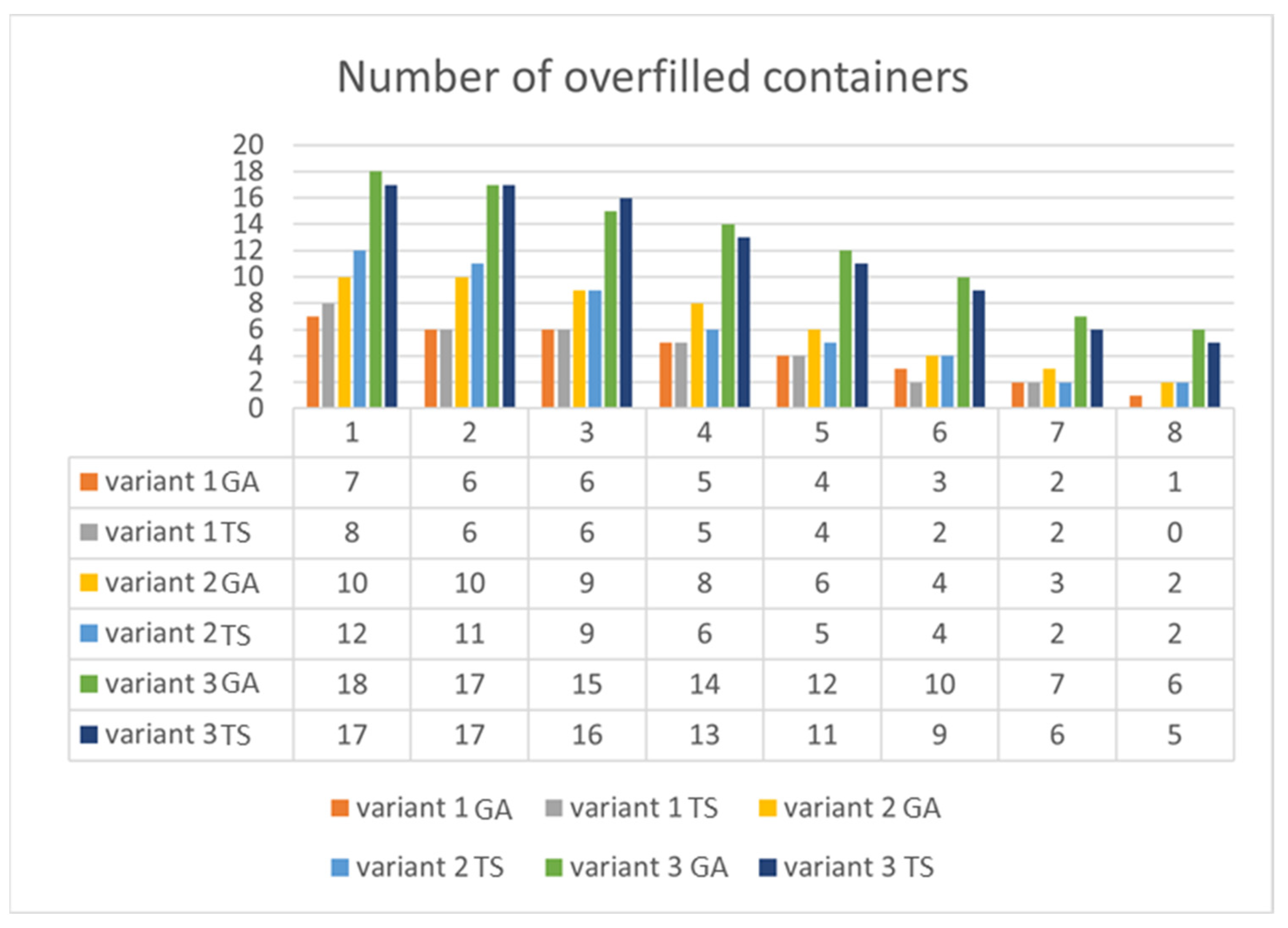
- Variant 1—safe, where each container is 80% filled (and the mixed container is 70% filled) and has to be emptied with the nearest route for a specific garbage type and not later than within 2 days.
- -
- Variant 2—average, where each container is 85% filled (and the mixed container is 75% filled) and has to be emptied with the nearest route for a specific garbage type and not later than within 2 days.
- -
- Variant 3—risky, where each container is 90% filled (and the mixed container is 80% filled) and must be emptied with the nearest route for a specific garbage type and not later than within 3 days.
5. Conclusions
- The optical sensor placed in the container can be susceptible to pollution. In a further investigation, a weight for each container can be taken into consideration.
- The company can propose that their customers adjust the container system: to use a different number of containers or different sizes of containers to reduce the number of overfilled ones.
- The company is going to replace two of their vehicles with newer models and gather new customers because new houses and flats are under construction. Vehicle capacity, adjusted to company needs, together with new route schedules, can bring additional savings.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Maity, S.K.; Bhattacharyay, B.K.; Bhattacharyya, B. A Case Study on Municipal Solid Waste Management in Salt Lake City. Int. J. Eng. Sci. Technol. (IJEST) 2011, 3, 6208–6211. [Google Scholar]
- Bahubalendruni, M.V.A.R.; Varupala, V.P. Disassembly Sequence Planning for Safe Disposal of End-of-Life Waste Electric and Electronic Equipment. Natl. Acad. Sci. Lett. 2021, 44, 243–247. [Google Scholar] [CrossRef]
- Demirbas, A. Waste management, waste resource facilities and waste conversion processes. Energy Convers. Manag. 2011, 52, 1280–1287. [Google Scholar] [CrossRef]
- Rees, W.E. Cities as Dissipative Structures: Global Change and the Vulnerability of Urban Civilization. In Sustainability Science; Weinstein, M., Turner, R., Eds.; Springer: New York, NY, USA, 2012; pp. 247–273. [Google Scholar] [CrossRef]
- O`Brien, M. A Crisis of Waste? Understanding the Rubbish Society; Taylor & Francis Group: New York, NY, USA, 2011. [Google Scholar] [CrossRef]
- Yu, H.; Sun, X.; Solvang, W.D.; Zhao, X. Reverse Logistics Network Design for Effective Management of Medical Waste in Epidemic Outbreaks: Insights from the Coronavirus Disease 2019 (COVID-19) Outbreak in Wuhan (China). Int. J. Environ. Res. Public Health 2020, 17, 1770. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Akhtar, M.; Hannan, M.A.; Begum, R.A.; Basri, H.; Scavino, E. Backtracking search algorithm in CVRP models for efficient solid waste collection and route optimization. Waste Manag. 2017, 61, 117–118. [Google Scholar] [CrossRef]
- Abdullah, N.; Al-wesabi, O.A.; Mohammed, B.A.; Al-Mekhlafi, Z.G.; Alazmi, M.; Alsaffar, M.S.; Aljaloud, A.S.; Baklizi, M.; Sumari, P. Improving Waste Management System Efficiency and Mobility with Efficient Path MANET. Appl. Sci. 2021, 11, 11039. [Google Scholar] [CrossRef]
- Razmjoo, A.; Gandomi, A.; Mahlooji, M.; Astiaso Garcia, D.; Mirjalili, S.; Rezvani, A.; Ahmadzadeh, S.; Memon, S. An Investigation of the Policies and Crucial Sectors of Smart Cities Based on IoT Application. Appl. Sci. 2022, 12, 2672. [Google Scholar] [CrossRef]
- Vishnu, S.; Ramson, S.R.J.; Rukmini, M.S.S.; Abu-Mahfouz, A.M. Sensor-Based Solid Waste Handling Systems: A Survey. Sensors 2022, 22, 2340. [Google Scholar] [CrossRef]
- Park, E.; Del Pobil, A.P.; Kwon, S.J. The Role of Internet of Things (IoT) in Smart Cities: Technology Roadmap-oriented Approaches. Sustainability 2018, 10, 1388. [Google Scholar] [CrossRef]
- Bhushan, B.; Sahoo, C.; Sinha, P.; Khamparia, A. Unification of Blockchain and Internet of Things (BIoT): Requirements, working model, challenges and future directions. Wirel. Netw. 2021, 27, 55–90. [Google Scholar] [CrossRef]
- Fan, K.; Luo, Q.; Zhang, K.; Yang, Y. Cloud-based lightweight secure RFID mutual authentication protocol in IoT. Inf. Sci. 2020, 527, 329–340. [Google Scholar] [CrossRef]
- Chi, T.; Chen, M. A frequency hopping method for spatial RFID/WiFi/Bluetooth scheduling in agricultural IoT. Wirel. Netw. 2017, 25, 805–817. [Google Scholar] [CrossRef]
- Chowdhury, A.; Raut, S.A. A survey study on internet of things resource management. J. Netw. Comput. Appl. 2018, 120, 42–60. [Google Scholar] [CrossRef]
- Tran-Dang, H.; Kim, D. An information framework for internet of things services in physical internet. IEEE Access 2018, 6, 43967–43977. [Google Scholar] [CrossRef]
- Choo, K.R.; Gritzalis, S.; Park, J.H. Cryptographic solutions for industrial internet-of-things: Research challenges and opportunities. IEEE Trans. Ind. Inform. 2018, 14, 3567–3569. [Google Scholar] [CrossRef]
- Mistry, I.; Tanwar, S.; Tyagi, S.; Kumar, N. Blockchain for 5G-enabled IoT for industrial automation: A systematic review, solutions, and challenges. Mech. Syst. Signal Processing 2020, 135, 106382. [Google Scholar] [CrossRef]
- Chettri, L.; Bera, R. A comprehensive survey on internet of things (IoT) toward 5G wireless systems. IEEE Internet Things J. 2020, 7, 16–32. [Google Scholar] [CrossRef]
- Corno, F.; Russis, L.D.; Saenz, J.P. How is open source software development different in popular IoT projects? IEEE Access 2020, 8, 28337–28348. [Google Scholar] [CrossRef]
- Pardini, K.; Rodrigues, J.J.; Diallo, O.; Das, A.K.; de Albuquerque, V.H.C.; Kozlov, S.A. A Smart Waste Management Solution Geared towards Citizens. Sensors 2020, 20, 2380. [Google Scholar] [CrossRef]
- Cruz, N.; Cota, N.; Tremoceiro, J. LoRaWAN and Urban Waste Management—A Trial. Sensors 2021, 21, 2142. [Google Scholar] [CrossRef]
- Del Pia, A.; Filippi, C. A variable neighborhood descent algorithm for a real waste collection problem with mobile depots. Int. Trans. Oper. Res. 2006, 13, 125–141. [Google Scholar] [CrossRef]
- Minh, T.T.; Van Hoai, T.; Nguyet, T.T.N. A Memetic Algorithm for Waste Collection Vehicle Routing Problem with Time Windows and Conflicts. In Computational Science and Its Applications; Murgante, B., Ed.; Springer: Berlin, Heidelberg, 2013; Volume 7971, pp. 485–499. [Google Scholar] [CrossRef]
- Gola, A.; Kłosowski, G. Application of fuzzy logic and genetic algorithms in automated works transport organization. In International Symposium on Distributed Computing and Artificial Intelligence; Omatu, S., Rodríguez, S., Villarrubia, G., Faria, P., Sitek, P., Prieto, J., Eds.; Springer: Cham, Switzerland, 2017; Volume 620, pp. 29–36. [Google Scholar] [CrossRef]
- Musiał, K.; Kotowska, J.; Górnicka, D.; Burduk, A. Tabu search and greedy algorithm adaptation to logistic task. In IFIP International Conference on Computer Information Systems and Industrial Management; Saeed, K., Homenda, W., Chaki, R., Eds.; Springer: Cham, Switzerland, 2017; Volume 10244, pp. 39–49. [Google Scholar] [CrossRef] [Green Version]
- Burduk, A.; Musiał, K.; Kochańska, J.; Górnicka, D.; Stetsenko, A. Tabu search and genetic algorithm for production process scheduling problem. LogForum 2019, 15, 181–189. [Google Scholar] [CrossRef]
- Bożejko, W.; Uchroński, M.; Wodecki, M. Parallel tabu search algorithm with uncertain data for the flexible job shop problem. In International Conference on Artificial Intelligence and Soft Computing; Rutkowski, L., Korytkowski, M., Scherer, R., Tadeusiewicz, R., Zadeh, L.A., Zurada, J.M., Eds.; Springer: Cham, Switzerland, 2016; Volume 9693, pp. 419–428. [Google Scholar] [CrossRef]
- Burduk, A.; Musiał, K.; Górnicka, D.; Kochańska, J. Production Effectiveness Improvement with the Use of Tabu Search. In IFIP International Conference on Computer Information Systems and Industrial Management; Saeed, K., Chaki, R., Janev, V., Eds.; Springer: Cham, Switzerland, 2019; Volume 11703, pp. 293–302. [Google Scholar] [CrossRef]
- Karadimas, N.V.; Doukas, N.; Kolokathi, M.; Defteraiou, G. Routing Optimization Heuristics Algorithms for Urban Solid Waste Transportation Management. WSEAS Trans. Comput. 2008, 7, 2022–2031. [Google Scholar]
- Hemmelmayr, V.C.; Doerner, K.F.; Hartl, R.F.; Vigo, D. Models and Algorithms for the Integrated Planning of Bin Allocation and Vehicle Routing in Solid Waste Management. Transp. Sci. 2013, 48, 103–120. [Google Scholar] [CrossRef] [Green Version]
- Caruso, C.; Colorni, A.; Paruccini, M. The regional urban solid waste management system: A modelling approach. Eur. J. Oper. Res. 1993, 70, 16–30. [Google Scholar] [CrossRef]
- Kim, B.I.; Kim, S.; Sahoo, S. Waste collection vehicle routing problem with time windows. Comput. Oper. Res. 2006, 33, 3624–3642. [Google Scholar] [CrossRef]
- Yeomans, J.S.; Huang, G.H.; Yoogalingam, R. Combining Simulation with Evolutionary Algorithms for Optimal Planning Under Uncertainty: An Application to Municipal Solid Waste Management Planning in the Reginonal Municipality of Hamilton-Wentworth. J. Environ. Inform. 2003, 2, 11–30. [Google Scholar] [CrossRef]
- Viotti, P.; Polettini, A.; Pomi, R.; Innocenti, C. Genetic algorithms as a promising tool for optimisation of the MSW collection routes. Waste Manag. Res. 2003, 21, 292–298. [Google Scholar] [CrossRef]
- Karadimas, N.V.; Papatzelou, K.; Loumos, V.G. Genetic Algorithms for Municipal Solid Waste Collection and Routing Optimization. In IFIP International Conference on Artificial Intelligence Applications and Innovations; Boukis, C., Pnevmatikakis, A., Polymenakos, L., Eds.; Springer: Boston, MA, USA, 2007; Volume 247, pp. 223–231. [Google Scholar] [CrossRef] [Green Version]
- Bautista, J.; Pereira, J. Ant Algorithms for Urban Waste Collection Routing. In International Workshop on Ant Colony Optimization and Swarm Intelligence; Dorigo, M., Birattari, M., Blum, C., Gambardella, L.M., Mondada, F., Stützle, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; Volume 3172, pp. 302–309. [Google Scholar] [CrossRef]
- Karadimas, N.V.; Papatzelou, K.; Loumos, V.G. Optimal solid waste collection routes identified by the ant colony system algorithm. Waste Manag. Res. 2007, 25, 139–147. [Google Scholar] [CrossRef]
- Brandão, J. A tabu search algorithm for the open vehicle routing problem. Eur. J. Oper. Res. 2004, 157, 552–564. [Google Scholar] [CrossRef]
- Cordeau, J.F.; Gendreau, M.; Laporte, G. A tabu search heuristic for periodic and multidepot vehicle routing problems. Networks 1997, 30, 105–119. [Google Scholar] [CrossRef]
- Grabowski, J.; Wodecki, M. A very fast tabu search algorithm for the permutation flow shop problem with makespan criterion. Comput. Oper. Res. 2004, 31, 1891–1909. [Google Scholar] [CrossRef]
- Glover, F.; Laguna, M. Tabu Search; Kluwer Academic Publishers: Amsterdam, The Netherlands, 1997. [Google Scholar] [CrossRef]
- Grabowski, J.; Pempera, J. New block properties for the permutation flow shop problem with application in tabu search. J. Oper. Res. Soc. 2001, 52, 210–220. [Google Scholar] [CrossRef]
- Hu, T.; Chen, L. Traffic signal optimization with greedy randomized tabu search algorithm. J. Transp. Eng. 2012, 138, 1040–1050. Available online: https://ascelibrary.org/journal/jtepbs (accessed on 20 March 2021). [CrossRef]
- Koza, J.R. Genetic Programming. In Encyclopedia of Computer Science and Technology; Kent, A., Williams, J.G., Eds.; Marcel-Dekker: New York, NY, USA, 1998; Volume 39, (Suppl. 24), pp. 29–43. [Google Scholar]
- Whitley, D. A genetic algorithm tutorial. Stat. Comput. 1994, 4, 65–85. [Google Scholar] [CrossRef]
- Harik, G.R.; Lobo, F.G.; Goldberg, D.E. The Compact Genetic Algorithm. IEEE Trans. Evol. Comput. 1999, 3, 287–297. [Google Scholar] [CrossRef] [Green Version]
- Kramer, O. Genetic Algorithm Essentials. Studies in Computational Intelligence; Springer: Cham, Switzerland, 2017; Volume 679, pp. 5–19. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| House Type | Houses No. | Container No. | ||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | ||
| House type 1 | 54 pcs | mixed | plastic | paper | glass | x | x | x |
| House type 2 | 269 pcs | mixed | plastic | paper | glass | bio | x | x |
| House type 3 | 17 pcs | mixed | plastic | plastic | paper | glass | bio | x |
| House type 4 | 3 pcs | mixed | mixed | mixed | plastic | paper | glass | bio |
| Total | 1684 containers | |||||||
| Parameter Type | Parameter Mark | Parameter Value |
|---|---|---|
| Container type | [c] | [c1, c2, …, c1684] |
| Fulfillment | [f] | [f1, f2, …, f1684] |
| Volume | [v] | [v1, v2, …, v1684] |
| Overfilling | [o] | [o1, o2, …, o1684] |
| Filling function | [fun] | [fun1, fun2, …, fun1684] |
| Distance matrix | [d] | [d1,1, d1,2, …, d1684,1684] |
| Truck capacity | [cap] | 8000 litters |
| Load time | [lt] | 120 s |
| Route number | [cn] | integer positive value |
| Route | [r] | [r1, r2, …, rcn] |
| No of Trips | Waste Type | Average Container Fill [%] | Overfilled Containers | Sum No. of Courses | ||||
|---|---|---|---|---|---|---|---|---|
| Mixed | Paper | Plastic | Glass | Bio | ||||
| company | 12 | 8 | 8 | 8 | 8 | 50–60 | 60–80 | 44 |
| variant 1—GA | 10 | 7 | 7 | 6 | 7 | 65.42 | 5 | 37 |
| variant 1—TS | 10 | 7 | 7 | 6 | 7 | 65.68 | 7 | 37 |
| variant 2—GA | 9 | 7 | 7 | 5 | 7 | 71.03 | 10 | 35 |
| variant 2—TS | 9 | 7 | 7 | 6 | 7 | 68.43 | 10 | 36 |
| variant 3—GA | 9 | 6 | 6 | 5 | 7 | 74.27 | 47 | 33 |
| variant 3—TS | 9 | 7 | 6 | 5 | 7 | 72.47 | 44 | 34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burduk, A.; Łapczyńska, D.; Kochańska, J.; Musiał, K.; Więcek, D.; Kuric, I. Waste Management with the Use of Heuristic Algorithms and Internet of Things Technology. Sensors 2022, 22, 8786. https://doi.org/10.3390/s22228786
Burduk A, Łapczyńska D, Kochańska J, Musiał K, Więcek D, Kuric I. Waste Management with the Use of Heuristic Algorithms and Internet of Things Technology. Sensors. 2022; 22(22):8786. https://doi.org/10.3390/s22228786
Chicago/Turabian StyleBurduk, Anna, Dagmara Łapczyńska, Joanna Kochańska, Kamil Musiał, Dorota Więcek, and Ivan Kuric. 2022. "Waste Management with the Use of Heuristic Algorithms and Internet of Things Technology" Sensors 22, no. 22: 8786. https://doi.org/10.3390/s22228786