
Electronic Tunability and Cancellation of Serial Losses in Wire Coils


Abstract
:1. Introduction
2. Circuits Suitable for Inductance Adjustment
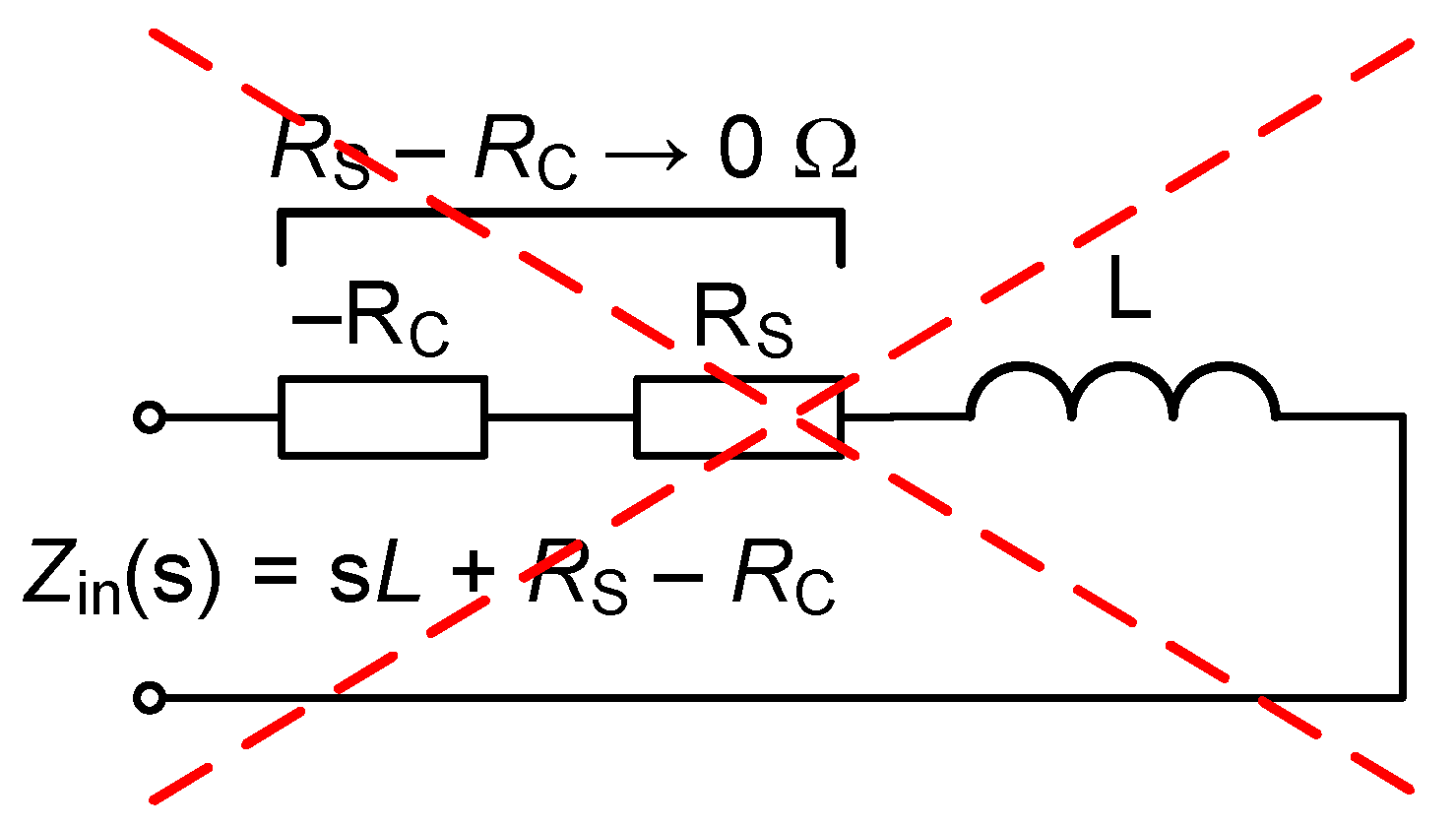
2.1. Cancellation of Serial Resistance by Passive Element
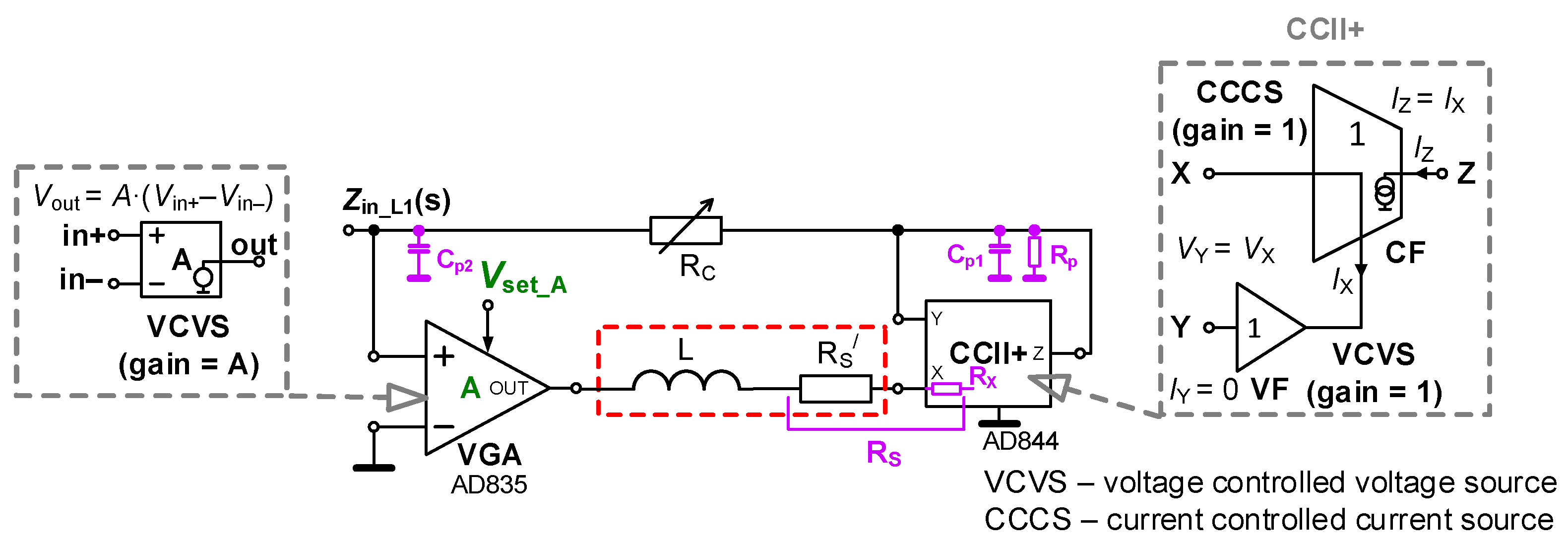
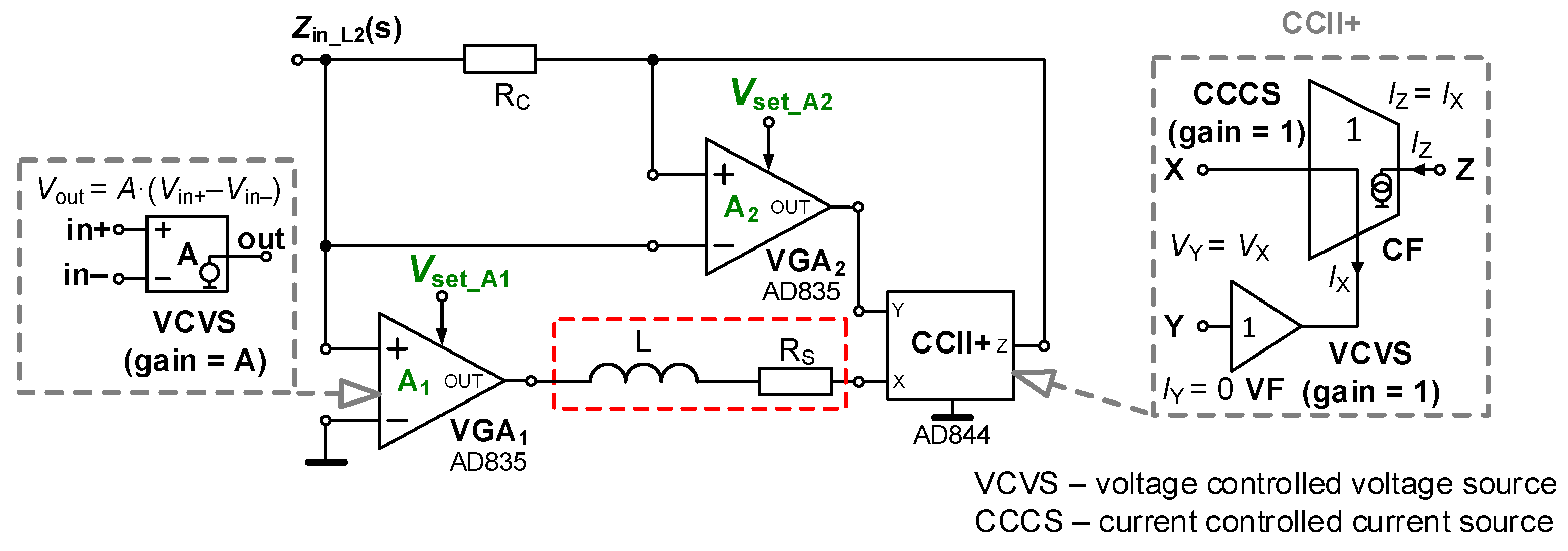
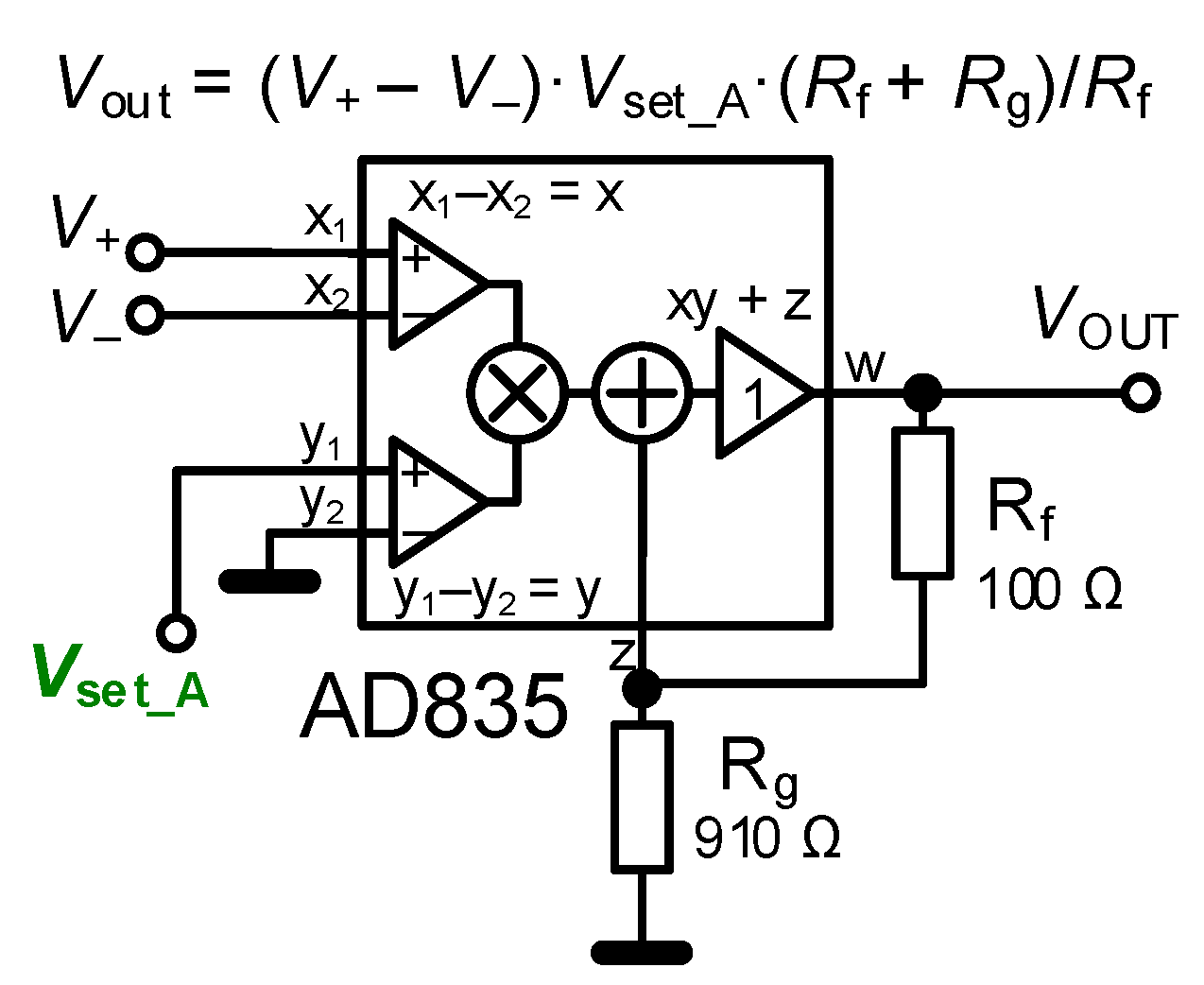
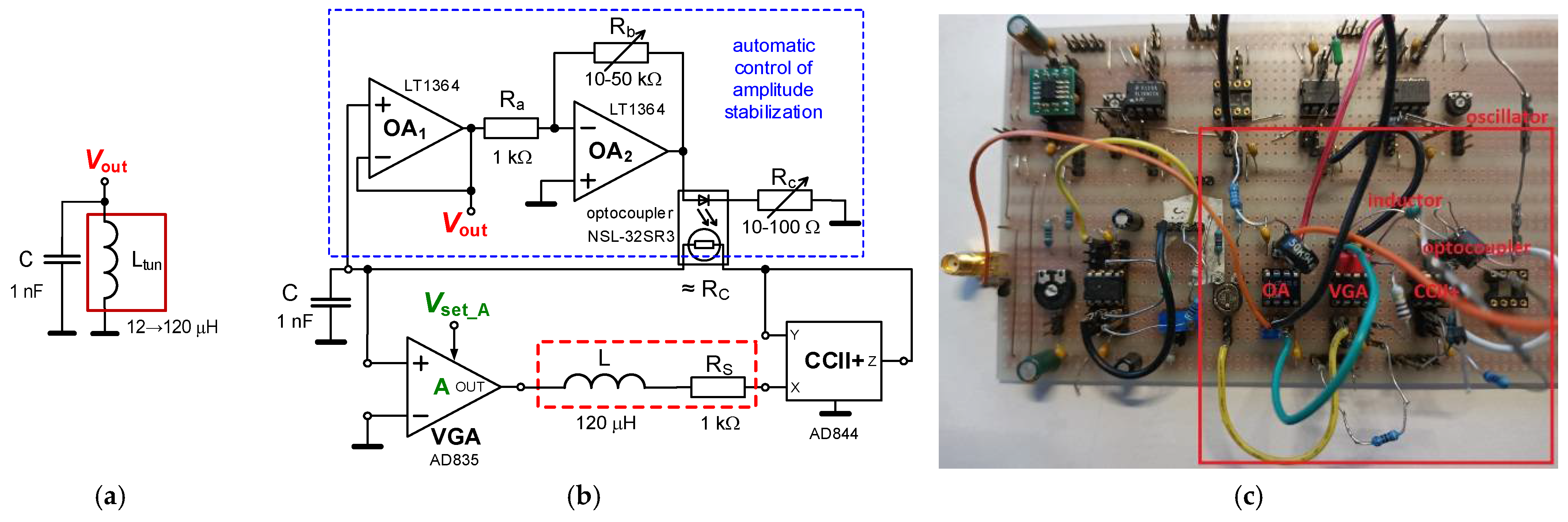
2.2. Electronic Cancellation of Serial Resistance and Electronic Control of Inductance Value
3. Simulation and Experimental Results
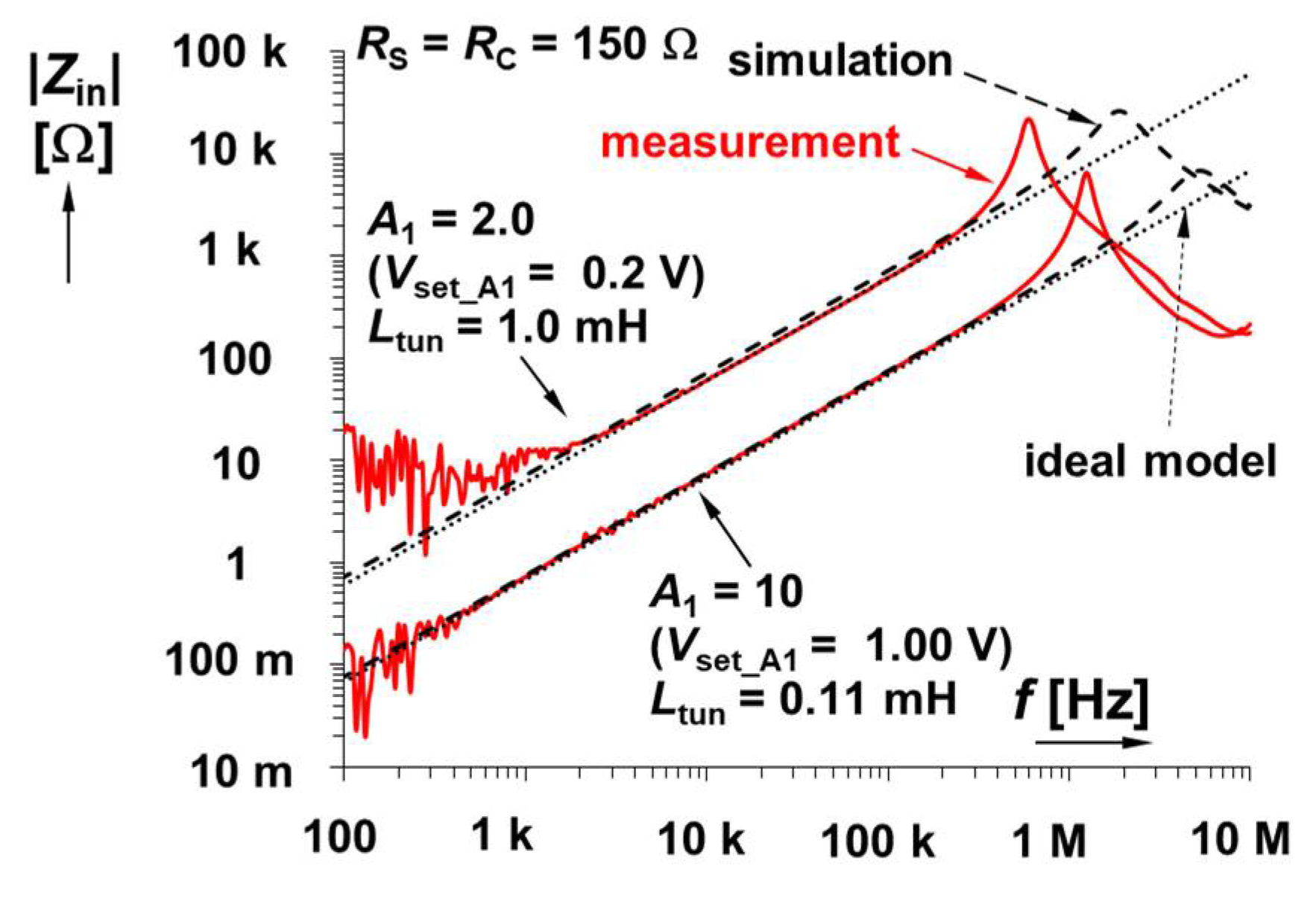
3.1. Cancellation of Serial Resistance by Passive Element—Experimental Verification
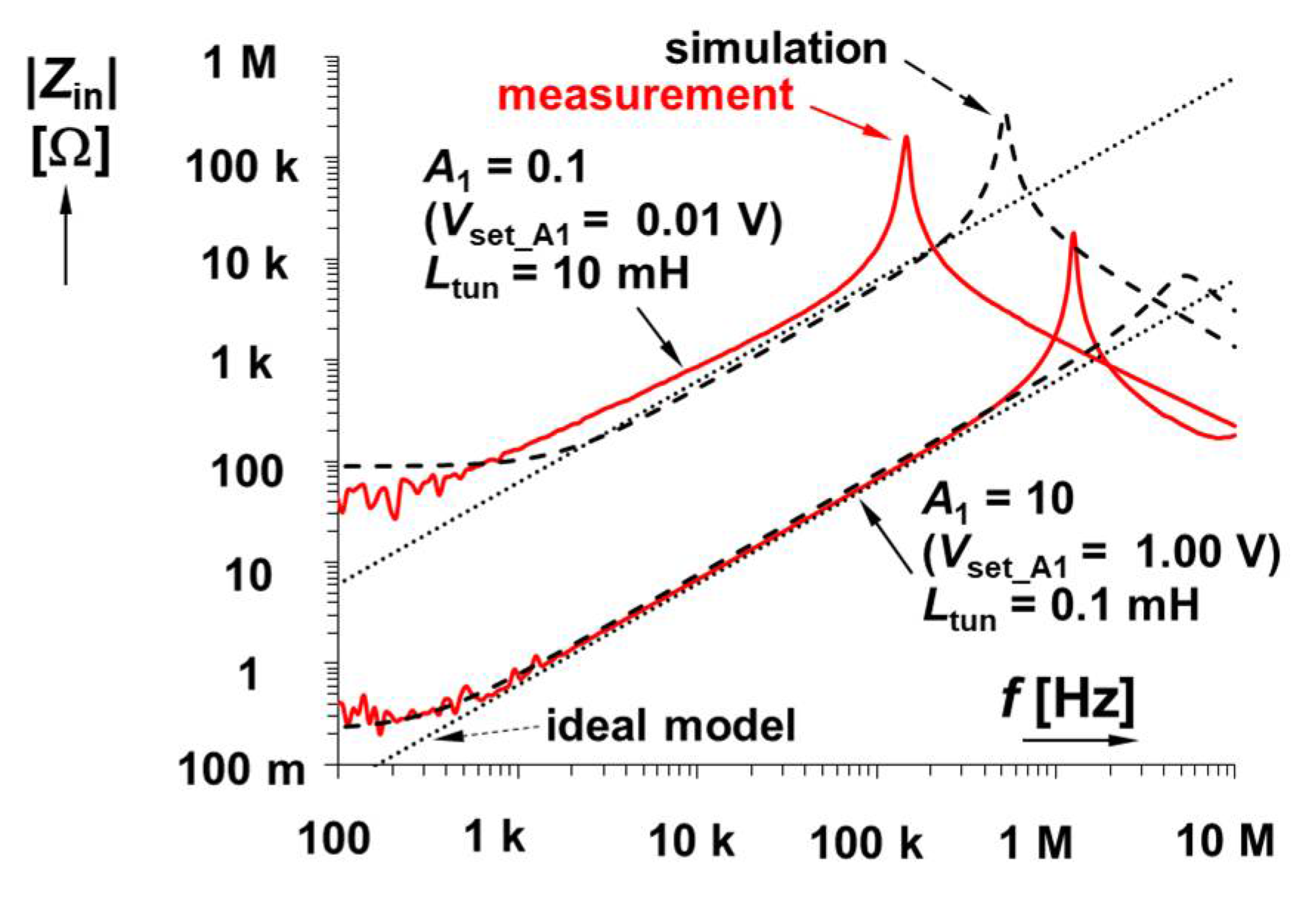
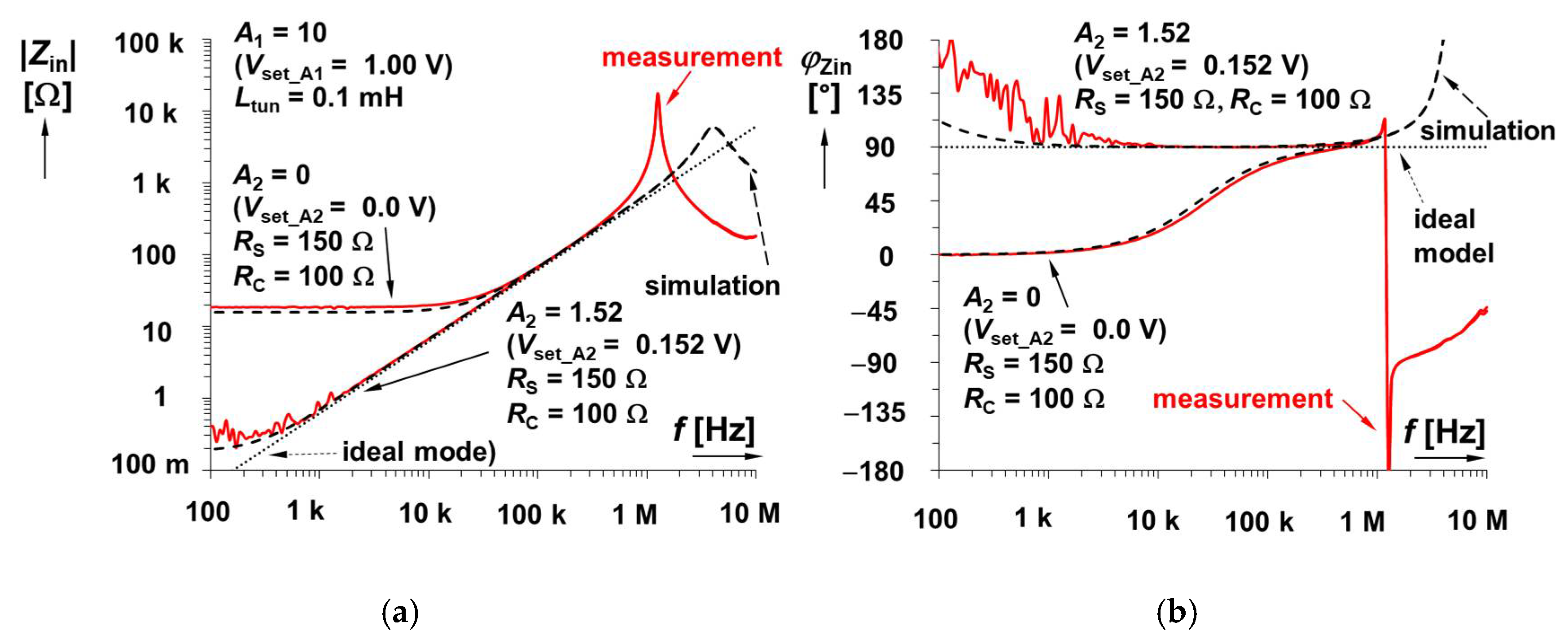
3.2. Electronic Cancellation of Serial Resistance and Electronic Control of Inductance Value—Experimental Verification
4. Application Examples
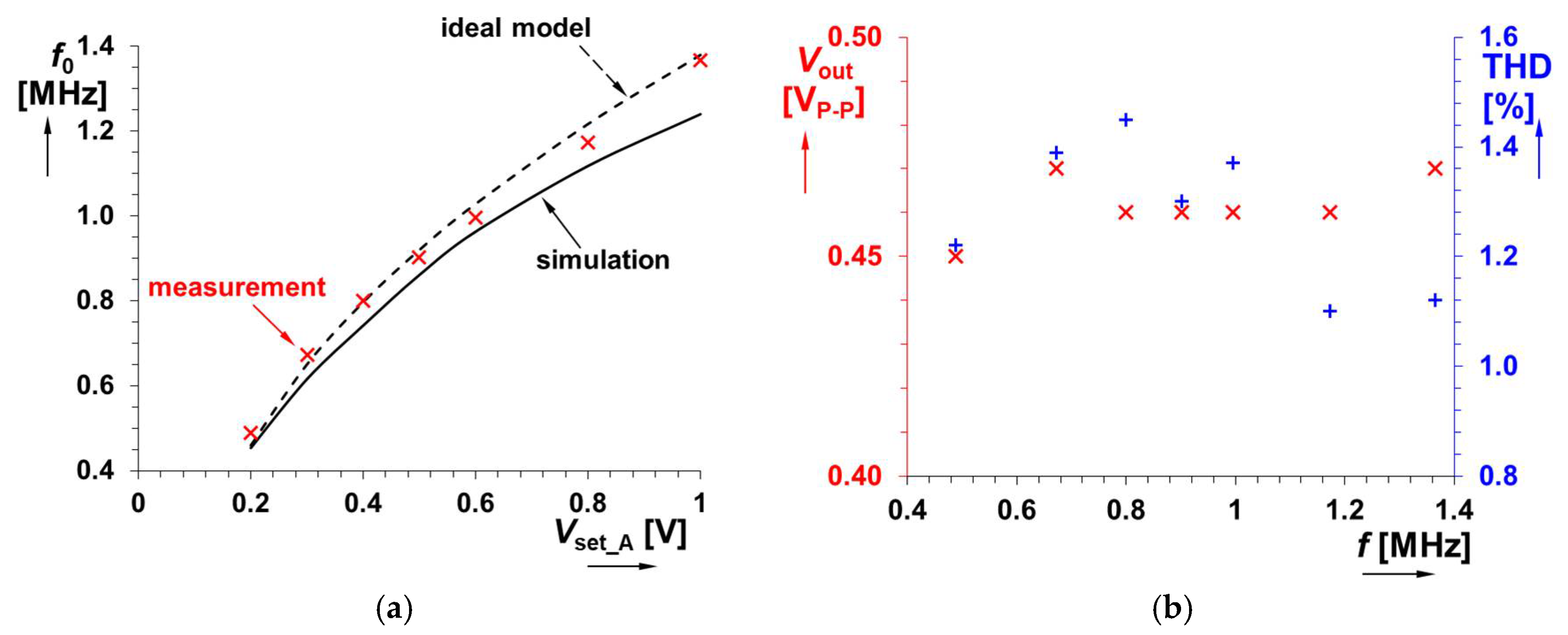
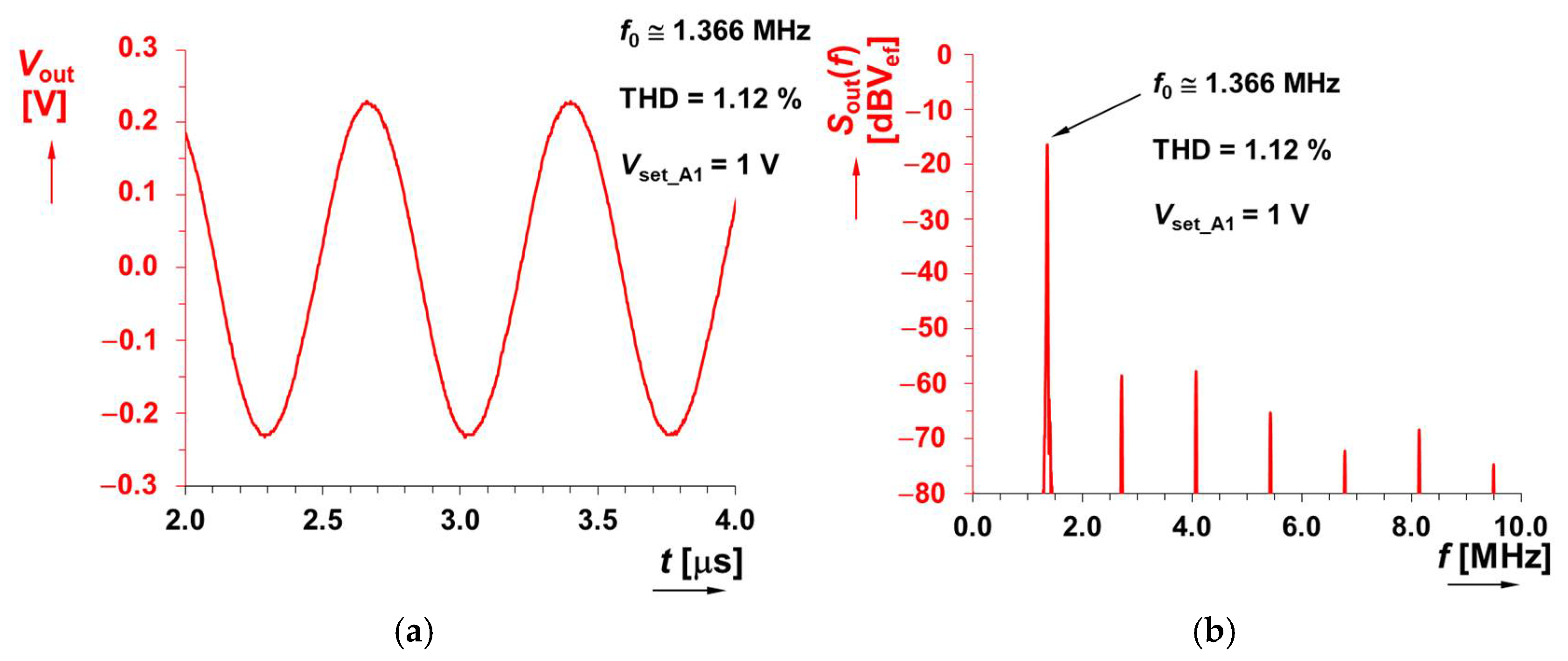
4.1. Electronically Adjustable LC Oscillator
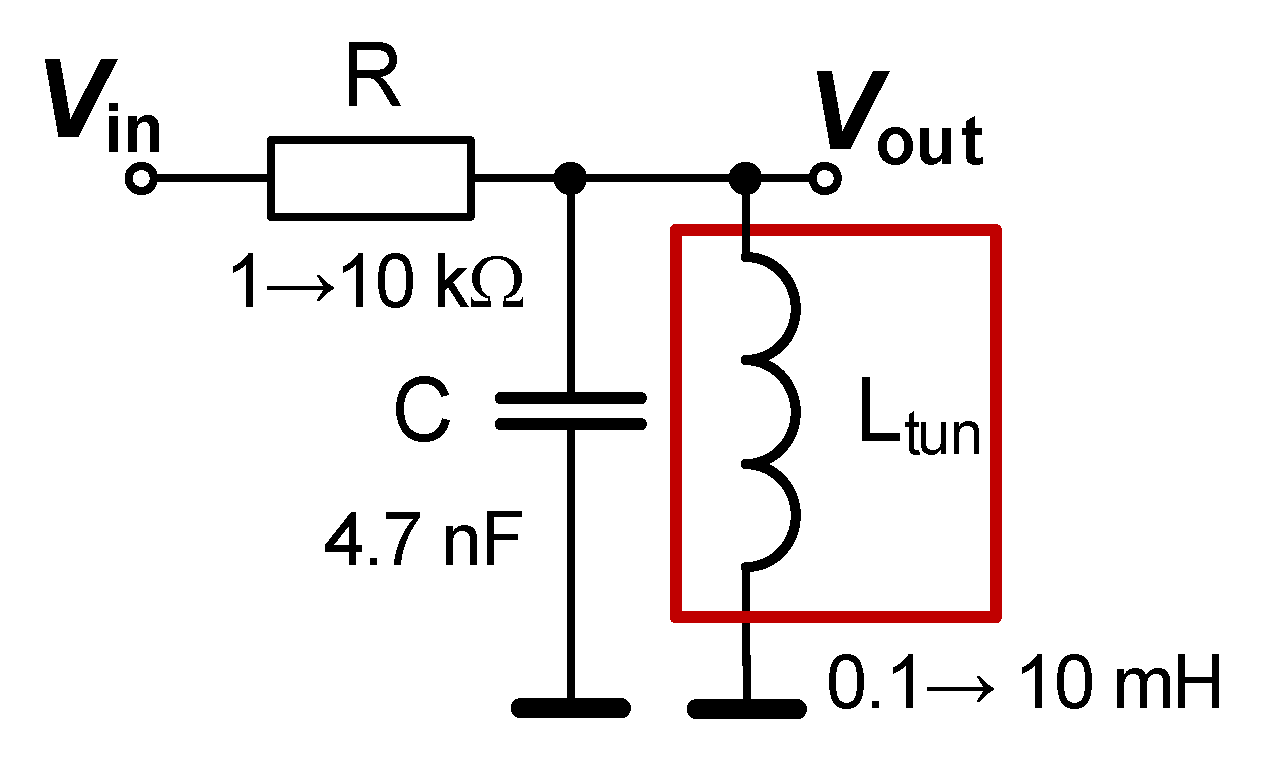
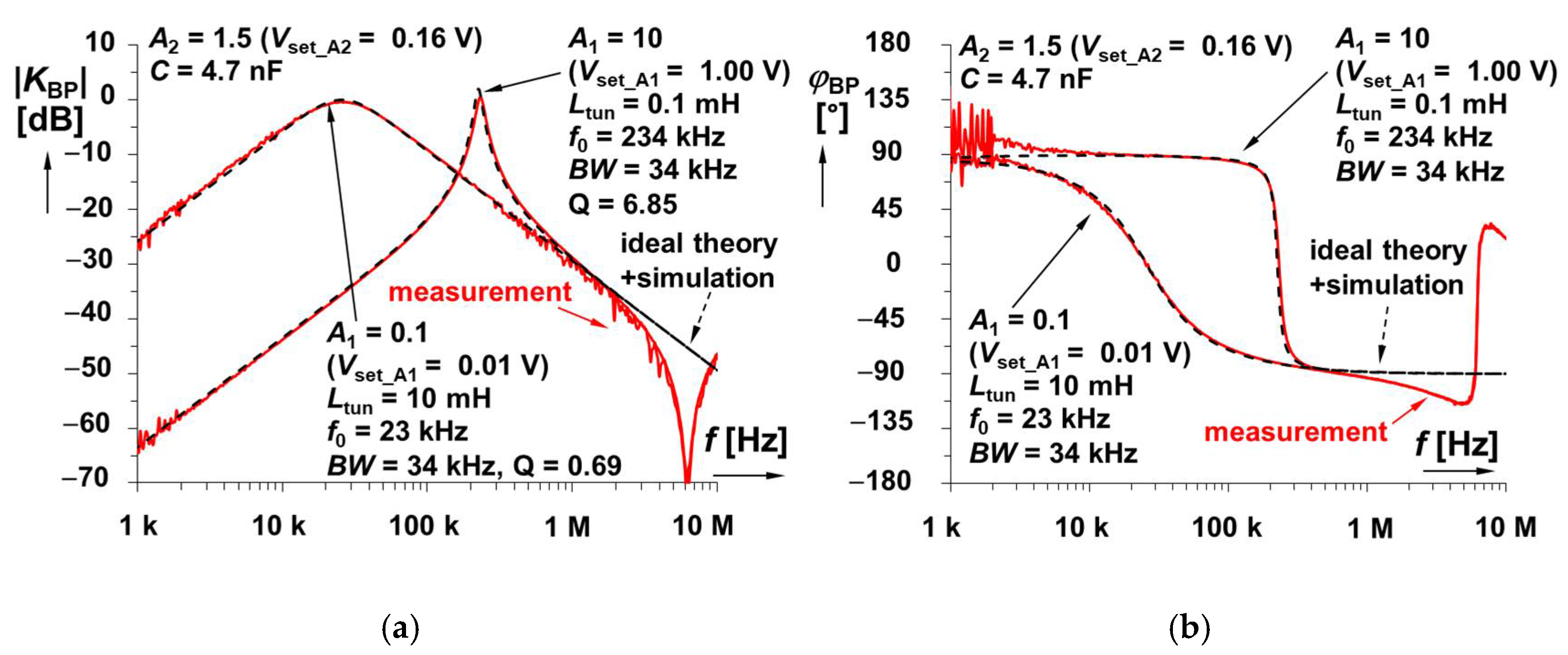
4.2. Electronically Tunable LC Band-Pass Filter
5. Importance of the Proposed Method for Sensing, Instrumentation and Measurement
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Biolek, D.; Senani, R.; Biolkova, V.; Kolka, Z. Active elements for analog signal processing: Classification, review, and new proposals. Radioengineering 2008, 17, 15–32. [Google Scholar]
- Senani, R.; Bhaskar, D.R.; Singh, A.K. Current Conveyors: Variants, Applications and Hardware Implementations; Springer: Berlin, Germany, 2015. [Google Scholar]
- Chen, W.K. The Circuits and Filters Handbook; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Raut, R.; Swamy, M.N.S. Modern Analog Filter Analysis and Design: A Practical Approach; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Yesil, A.; Yuce, E.; Minaei, S. Grounded capacitance multipliers based on active elements. AEU-Int. J. Electron. Commun. 2017, 79, 243–249. [Google Scholar] [CrossRef]
- Al-Absi, M.A.; Abuelma’atti, M.T. A novel tunable grounded positive and negative impedance multiplier. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 924–927. [Google Scholar] [CrossRef]
- Al-Absi, M.A.; Al-Khulaifi, A.A. A new floating and tunable capacitance multiplier with large multiplication factor. IEEE Access 2019, 7, 120076–120081. [Google Scholar] [CrossRef]
- Tangsrirat, W.; Channumsin, O. Tunable floating capacitance multiplier using single fully balanced voltage differencing buffered amplifier. J. Commun. Technol. Electron. 2019, 64, 797–803. [Google Scholar] [CrossRef]
- Biolek, D.; Vavra, J.; Keskin, A.Ü. CDTA-based capacitance multipliers. Circuits Syst. Signal Process. 2019, 38, 1466–1481. [Google Scholar] [CrossRef]
- Sotner, R.; Jerabek, J.; Polak, L.; Petrzela, J. Capacitance multiplier using small values of multiplication factors for adjustability extension and parasitic resistance cancellation technique. IEEE Access 2020, 8, 144382–144392. [Google Scholar] [CrossRef]
- Sagbas, M.; Ayten, U.E.; Sedef, H.; Koksal, M. Electronically tunable floating inductance simulator. AEU-Int. J. Electron. Commun. 2009, 63, 423–427. [Google Scholar] [CrossRef]
- Ayten, U.E.; Sagbas, M.; Herencsar, N.; Koton, J. Novel floating general element simulators using CBTA. Radioengineering 2012, 21, 11–19. [Google Scholar]
- Kaçar, F.; Yeşil, A.; Minaei, S.; Kuntman, H. Positive/negative lossy/lossless grounded inductance simulators employing single VDCC and only two passive elements. AEU-Int. J. Electron. Commun. 2014, 68, 73–78. [Google Scholar] [CrossRef]
- Yeşil, A.; Kaçar, F.; Gürkan, K. Lossless grounded inductance simulator employing single VDBA and its experimental band-pass filter application. AEU-Int. J. Electron. Commun. 2014, 68, 143–150. [Google Scholar] [CrossRef]
- Prasad, D.; Ahmad, J. New electronically-controllable lossless synthetic floating inductance circuit using single VDCC. Circuits Syst. 2014, 5, 13–17. [Google Scholar] [CrossRef] [Green Version]
- Metin, B.; Atasoyu, M.; Arslan, E.; Herencsar, N.; Cicekoglu, O. A tunable immitance simulator with a voltage differential current conveyor. In Proceedings of the 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 739–742. [Google Scholar] [CrossRef]
- Sotner, R.; Herencsar, N.; Jerabek, J.; Kartci, A.; Koton, J.; Dostal, T. Pseudo-differential filter design using novel adjustable floating inductance simulator with electronically controllable current conveyors. Elektron. Elektrotechnika 2017, 23, 31–35. [Google Scholar] [CrossRef]
- Sotner, R.; Jerabek, J.; Herencsar, N.; Langhammer, L.; Petrzela, J.; Dostal, T. Methods for Extension of Tunability Range in Synthetic Inductance Simulators. Elektron. Elektrotechnika 2018, 24, 41–45. [Google Scholar] [CrossRef]
- Faseehuddin, M.; Sampe, J.; Shireen, S.; Ali, S.H.M. Lossy and lossless inductance simulators and universal filters employing a new versatile active block. Inf. MIDEM 2018, 48, 97–114. [Google Scholar]
- Tangsrirat, W. Synthetic grounded lossy inductance simulators using single VDIBA. IETE J. Res. 2017, 63, 134–141. [Google Scholar] [CrossRef]
- Faseehuddin, M.; Sampe, J.; Ali, S.H.M. Grounded impedance simulator topologies employing minimum passive elements. Int. J. Eng. Technol. 2018, 7, 1–5. [Google Scholar] [CrossRef]
- Srivastava, M.; Bhardwaj, K. Compact lossy inductance simulators with electronic control. Iran. J. Electr. Electron. Eng. 2019, 15, 343–351. [Google Scholar] [CrossRef]
- Al-Absi, M.A. Realization of a large values floating and tunable active inductor. IEEE Access 2019, 7, 42609–42613. [Google Scholar] [CrossRef]
- Jaikla, W.; Sotner, R.; Khateb, F. Design and analysis of floating inductance simulators using VDDDAs and their applications. AEU-Int. J. Electron. Commun. 2019, 112, 152937. [Google Scholar] [CrossRef]
- Sotner, R.; Jerabek, J.; Polak, L.; Prokop, R.; Jaikla, W. A Single Parameter Voltage Adjustable Immittance Topology for Integer-and Fractional-Order Design Using Modular Active CMOS Devices. IEEE Access 2021, 9, 73713–73727. [Google Scholar] [CrossRef]
- Antoniou, A. Gyrators using operational amplifiers. Electron. Lett. 1967, 3, 350–352. [Google Scholar] [CrossRef]
- Antoniou, A. Novel RC-active-network synthesis using generalized-immittance converters. IEEE Trans. Circuit Theory 1970, 17, 212–217. [Google Scholar] [CrossRef]
- Geiger, R.L.; Sanchez-Sinencio, E. Active filter design using operational transconductance amplifiers: A tutorial. IEEE Circuits Devices Mag. 1985, 1, 20–32. [Google Scholar] [CrossRef]
- Yuan, F. CMOS Active Inductors and Transformers Principle Implementation and Applications; Springer: Berlin, Germany, 2008. [Google Scholar]
- Senani, R.; Bhaskar, D.R.; Singh, V.K.; Sharma, R.K. Sinusoidal Oscillators and Waveform Generators Using Modern Electronic Circuit Building Blocks; Springer: Berlin, Germany, 2016. [Google Scholar]
- Larky, A. Negative-impedance converters. IRE Trans. Circuit Theory 1957, 4, 124–131. [Google Scholar] [CrossRef]
- Analog Devices. AD844 60 MHz, 2000 V/us, Monolithic Op Amp with Quad Low Noise, Datasheet. 2017. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/AD844.pdf (accessed on 23 July 2022).
- Analog Devices. AD835 250 MHz, Voltage Output, 4-Quadrant Multiplier, Datasheet. 2014. Available online: http://www.analog.com/media/en/technical-documentation/data-sheets/AD835.pdf (accessed on 23 July 2022).
- Kolka, Z.; Biolkova, V.; Biolek, D. New version of SNAP simulator. In Proceedings of the 2017 Communication and Information Technologies (KIT), Vysoke Tatry, Slovakia, 4–6 October 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Luna Optoelectronics. NSL-32SR3 Optocoupler, Datasheet. 2016. Available online: https://pdf1.alldatasheet.com/datasheet-pdf/view/1122438/LUNA/NSL-32SR3.html (accessed on 23 July 2022).
- Sotner, R.; Jerabek, J.; Langhammer, L.; Dvorak, J. Design and analysis of CCII-based oscillator with amplitude stabilization employing optocouplers for linear voltage control of the output frequency. Electronics 2018, 7, 157. [Google Scholar] [CrossRef]
- Kennedy, M.P. Chaos in the Colpitts oscillator. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1994, 41, 771–774. [Google Scholar] [CrossRef]
- Manetakis, K.; Jessie, D.; Narathong, C. A CMOS VCO with 48% tuning range for modern broadband systems. In Proceedings of the IEEE 2004 Custom Integrated Circuits Conference (IEEE Cat. No.04CH37571), Orlando, FL, USA, 6 October 2004; pp. 265–268. [Google Scholar] [CrossRef]
- Hauspie, D.; Park, E.C.; Craninckx, J. Wideband VCO With Simultaneous Switching of Frequency Band, Active Core, and Varactor Size. IEEE J. Solid-State Circuits 2007, 42, 1472–1480. [Google Scholar] [CrossRef]
- Broussev, S.S.; Lehtonen, T.A.; Tchamov, N.T. A Wideband Low Phase-Noise LC-VCO with Programmable KVCO. IEEE Microw. Wirel. Compon. Lett. 2007, 17, 274–276. [Google Scholar] [CrossRef]
- Kim, J.; Shin, J.; Kim, S.; Shin, H. A Wide-Band CMOS LC VCO with Linearized Coarse Tuning Characteristics. IEEE Trans. Circuits Syst. II Express Briefs 2008, 55, 399–403. [Google Scholar] [CrossRef]
- Cordeau, D.; Paillot, J.M. Minimum phase noise of an LC oscillator: Determination of the optimal operating point of the active part. AEU-Int. J. Electron. Commun. 2010, 64, 795–805. [Google Scholar] [CrossRef]
- Azadmousavi, T.; Aghdam, E.N. A low power current-reuse LC-VCO with an adaptive body-biasing technique. AEU-Int. J. Electron. Commun. 2018, 89, 56–61. [Google Scholar] [CrossRef]
- Azadmehr, M.; Paprotny, I.; Marchetti, L. 100 years of Colpitts Oscillators: Ontology Review of Common Oscillator Circuit Topologies. IEEE Circuits Syst. Mag. 2020, 20, 8–27. [Google Scholar] [CrossRef]
- Kizmaz, M.M.; Herencsar, N.; Cicekoglu, O. Wide-tunable LC-VCO design with a novel active inductor. AEU-Int. J. Electron. Commun. 2022, 153, 154266. [Google Scholar] [CrossRef]
- El Matbouly, H.; Nikbakhtnasrabadi, F.; Dahiya, R. RFID Near-field Communication (NFC)-Based Sensing Technology in Food Quality Control. In Biosensing and Micro-Nano Devices; Springer: Berlin, Germany, 2022. [Google Scholar] [CrossRef]
- Pfeffer, D.; Hatzfeld, C.; Werthschützky, R. Development of an electrodynamic velocity sensor for active mounting structures. Procedia Eng. 2011, 25, 547–550. [Google Scholar] [CrossRef]
- Kim, Y.; Kye, S.; Hwang, Y.; Jung, H.-J. Experimental investigation on energy harvesting performance of regenerative hybrid electrodynamic damper. Sens. Actuators A Phys. 2022, 334, 113317. [Google Scholar] [CrossRef]
- Mahmood, A.I.; Gharghan, S.K.; Eldosoky, M.A.; Soliman, A.M. Near-Field Wireless Power Transfer used in biomedical implants: A comprehensive review. IET Power Electron. 2022; First Online. [Google Scholar] [CrossRef]
- Sotner, R.; Jerabek, J.; Polak, L.; Prokop, R.; Kledrowetz, V. Integrated Building Cells for a Simple Modular Design of Electronic Circuits with Reduced External Complexity: Performance, Active Element Assembly, and an Application Example. Electronics 2019, 8, 568. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solution | Use of Real Inductor | Number of Active/Passive Elements (Including Serial Resistance) | Driving Force | Controlled Parameter | Reported as Lossless | Cancellation of Losses (in Lossy Operation) Possible | Electronic Cancellation of Losses | Power Consumption * | FOM |
|---|---|---|---|---|---|---|---|---|---|
| [11] | No | 2/1(0) | DC current | gm | N/A | No | No | N/A | 0.33 |
| [12] | No | 2/3(0) | DC current | gm | N/A | No | No | up 41 mW | 0.20 |
| [13] | No | 1/2(0) | DC current | gm | partially a | No | No | 0.9 mW | 0.33 |
| [14] | No | 1/2(0) | - | gm | Yes | No | No | N/A | 0.33 |
| [15] | No | 1/2(0) | DC current | gm | Yes | No | No | N/A | 0.33 |
| [16] | No | 1/2(0) | DC current | gm | Yes | No | No | N/A | 0.33 |
| [17] | No | 4/4(0) | DC voltage | B | No | Yes | Yes | N/A | 0.38 |
| [18] | No | 4/3(0) | DC voltage | A | Yes | No | No | N/A | 0.14 |
| [19] | No | 1/2–3(0) | DC current | gm | partially a | No | No | N/A | 0.33 |
| [20] | No | 1/2(0) | DC current | gm | No | No | No | 5.7 mW | 0.33 |
| [21] | No | 1/2(0) | DC current | gm | N/A | No | No | N/A | 0.33 |
| [22] | No | 1/2(0) | DC current | gm | No | No | No | 63 mW | 0.33 |
| [23] | No | 2/2(0) | DC current | gm | No | No | No | N/A | 0.25 |
| [24] | No | 2/1–2(0) | DC current | gm | partially a | No | No | N/A | 0.33 |
| [25] | No | 2/2(0) | DC voltage | gm | Yes | No | No | 20 mW | 0.25 |
| Figure 2 | Yes | 2/2(3) | DC voltage | A | Yes | Yes | No | 113 mW | 0.50 |
| Figure 3 | Yes | 3/2(3) | DC voltage | A | Yes | Yes | Yes | 162 mW | 0.60 |
| Solution | Colpitts Type | Number and Type of Active/Passive Elements (Including Serial Resistance and Amplitude Stabilization) | Bias Point Setting Not Required | Continuous Electronic Tuning Allowed (in Full Range) | Switching of Capacitor/Inductor Banks Not Required for Full Range | Driving Force | Amplitude Stabilization (Almost Constant Output Level at All Frequencies) | Tunability Range Ratio (fmax/fmin in Single Band without Switching) | Application Bands | Suitable for Low Frequency Bands |
|---|---|---|---|---|---|---|---|---|---|---|
| [37] | Yes | 1 BJT/4 | No | N/A | N/A | N/A | N/A (N/A) | N/A | N/A | N/A |
| [38] | No | 2 CMOS/8+ | No | Yes (No) | No | Voltage (0.4 → 2.3 V) | No (N/A) | ≅1.3–1.5 | GHz | No |
| [39] | No | 5+ CMOS/3+ | No | Yes (No) | No | Voltage (0 → 1.2 V) | No (N/A) | ≅1.02 | GHz | No |
| [40] | No | 5+ CMOS/5+ | No | Yes (No) | No | Voltage (0 → 1.2 V) | N/A (N/A) | ≅1.02 | GHz | No |
| [41] | No | 5+ CMOS/5+ | No | Yes (No) | No | Voltage (0 → 1.8 V) | N/A (N/A) | ≅1.06 | GHz | No |
| [42] | No | 1–2 BJT, 2 CMOS/8+ | No | Yes (No) | No | Voltage (0 → 3.0 V) | No (N/A) | ≅1.2 | GHz | No |
| [43] | No | 4 CMOS/5 | Yes | Yes (No) | Yes | Voltage (0 → 0.9 V) | N/A (Yes) | ≅1.1 | GHz | No |
| [44] | Yes | 1 amplifier, 2+ CMOS/3 or more | No | N/A | N/A | N/A | N/A (N/A) | N/A | N/A | N/A |
| [45] | No | 2 CMOS/3 | No | No | No | Voltage (0.7 → 1.2 V | N/A (N/A) | ≅1.2 | GHz | No |
| Figure 8 | No | 2 OA, VGA, CCII/6 | Yes | Yes (Yes) | Yes | Voltage (0.2 → 1 V) | Yes | ≅2.8 | kHz, MHz | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sotner, R.; Jerabek, J.; Polak, L.; Theumer, R.; Langhammer, L. Electronic Tunability and Cancellation of Serial Losses in Wire Coils. Sensors 2022, 22, 7373. https://doi.org/10.3390/s22197373
Sotner R, Jerabek J, Polak L, Theumer R, Langhammer L. Electronic Tunability and Cancellation of Serial Losses in Wire Coils. Sensors. 2022; 22(19):7373. https://doi.org/10.3390/s22197373
Chicago/Turabian StyleSotner, Roman, Jan Jerabek, Ladislav Polak, Radek Theumer, and Lukas Langhammer. 2022. "Electronic Tunability and Cancellation of Serial Losses in Wire Coils" Sensors 22, no. 19: 7373. https://doi.org/10.3390/s22197373