
A Versatile Model for Describing Energy Harvesting Characteristics of Composite-Laminated Piezoelectric Cantilever Patches

Abstract
:1. Introduction
2. Energy Harvesting Experiment
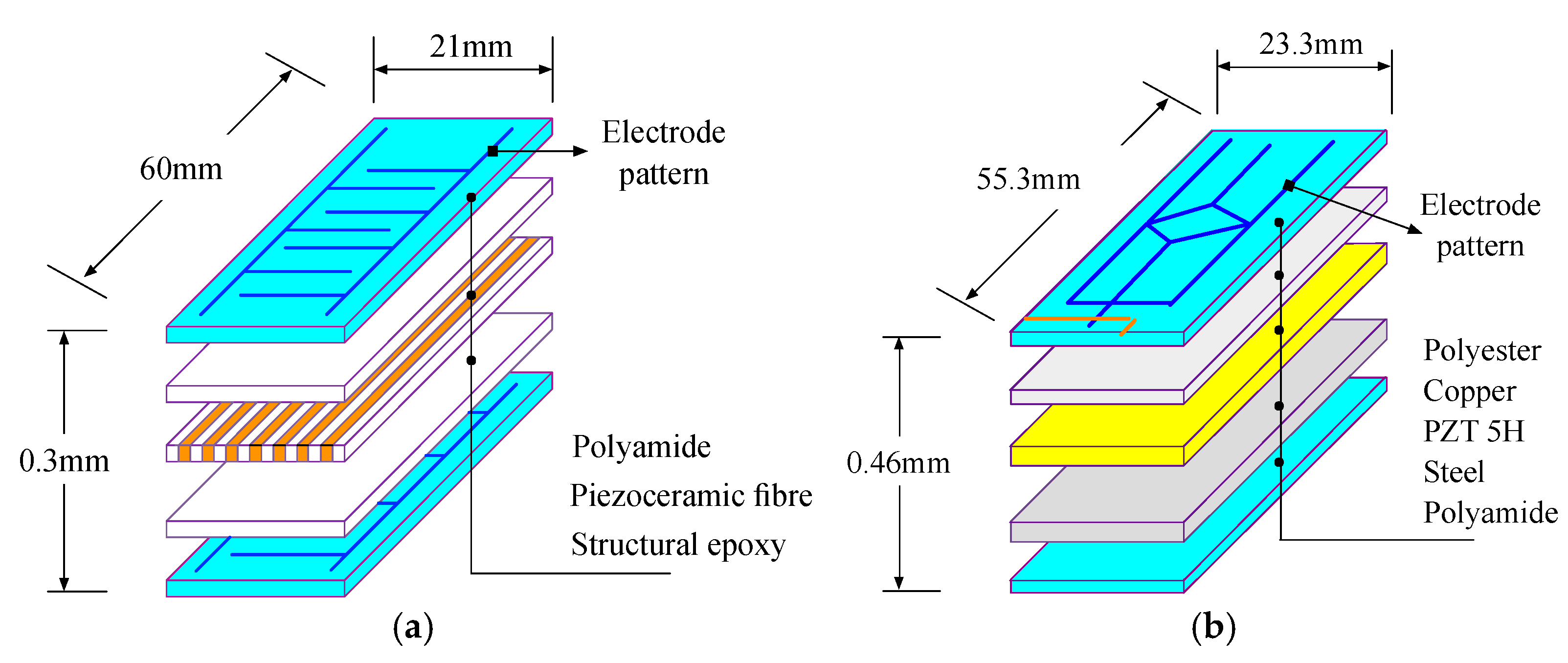
2.1. Harvester Samples
- (1)
- MFC patch
- (2)
- PPA patch
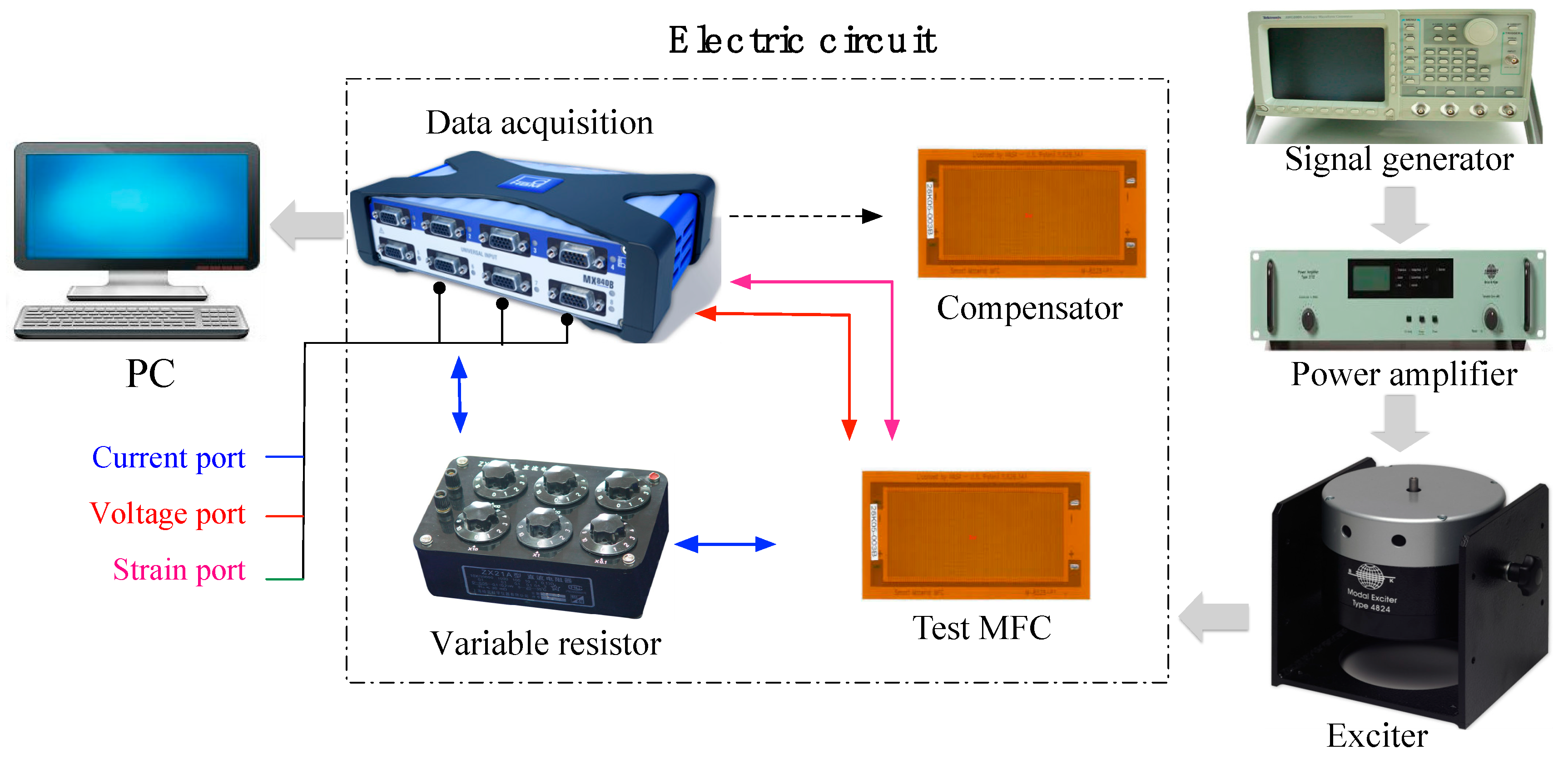
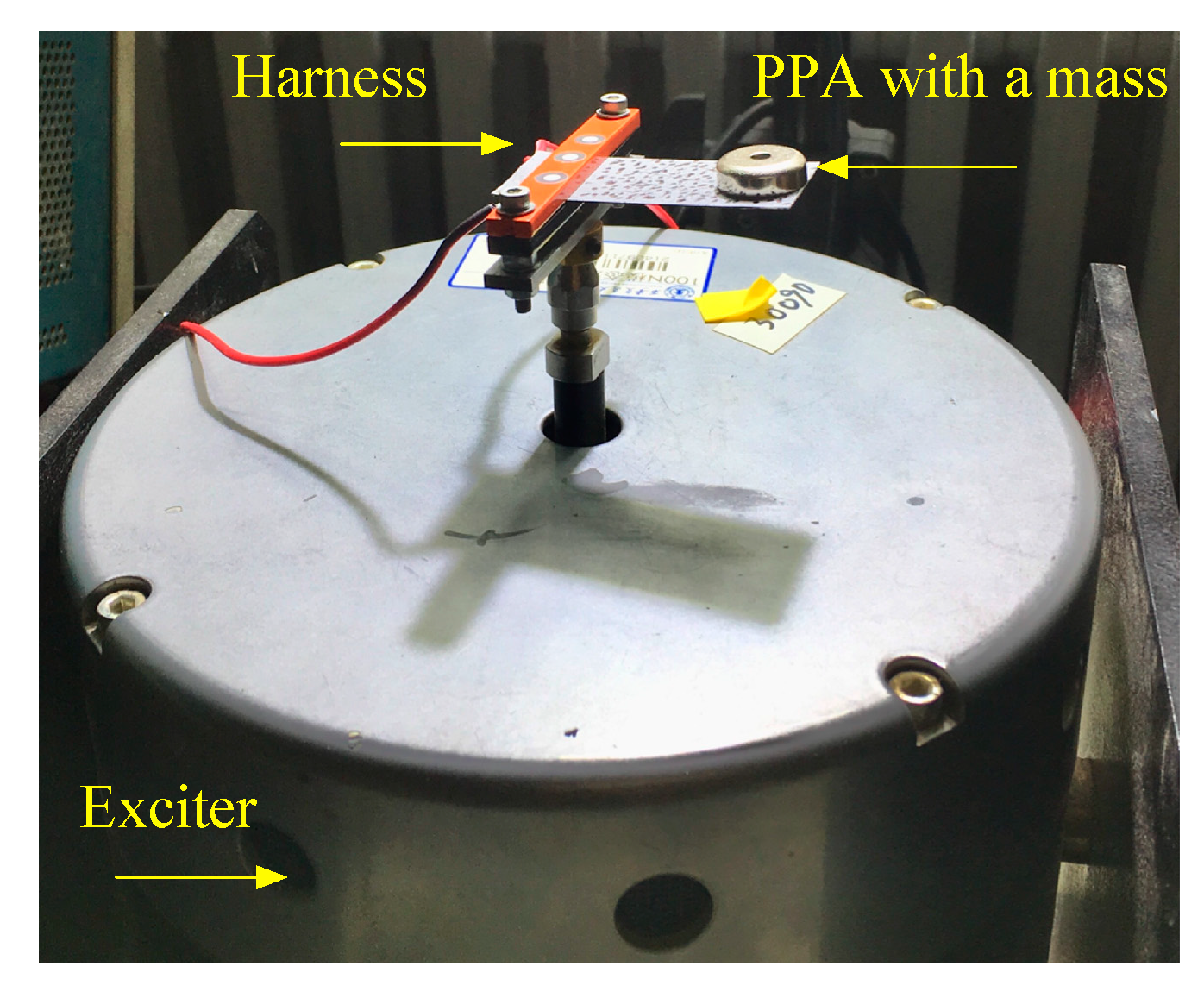
2.2. Experimental Procedure
2.3. Experimental Investigation
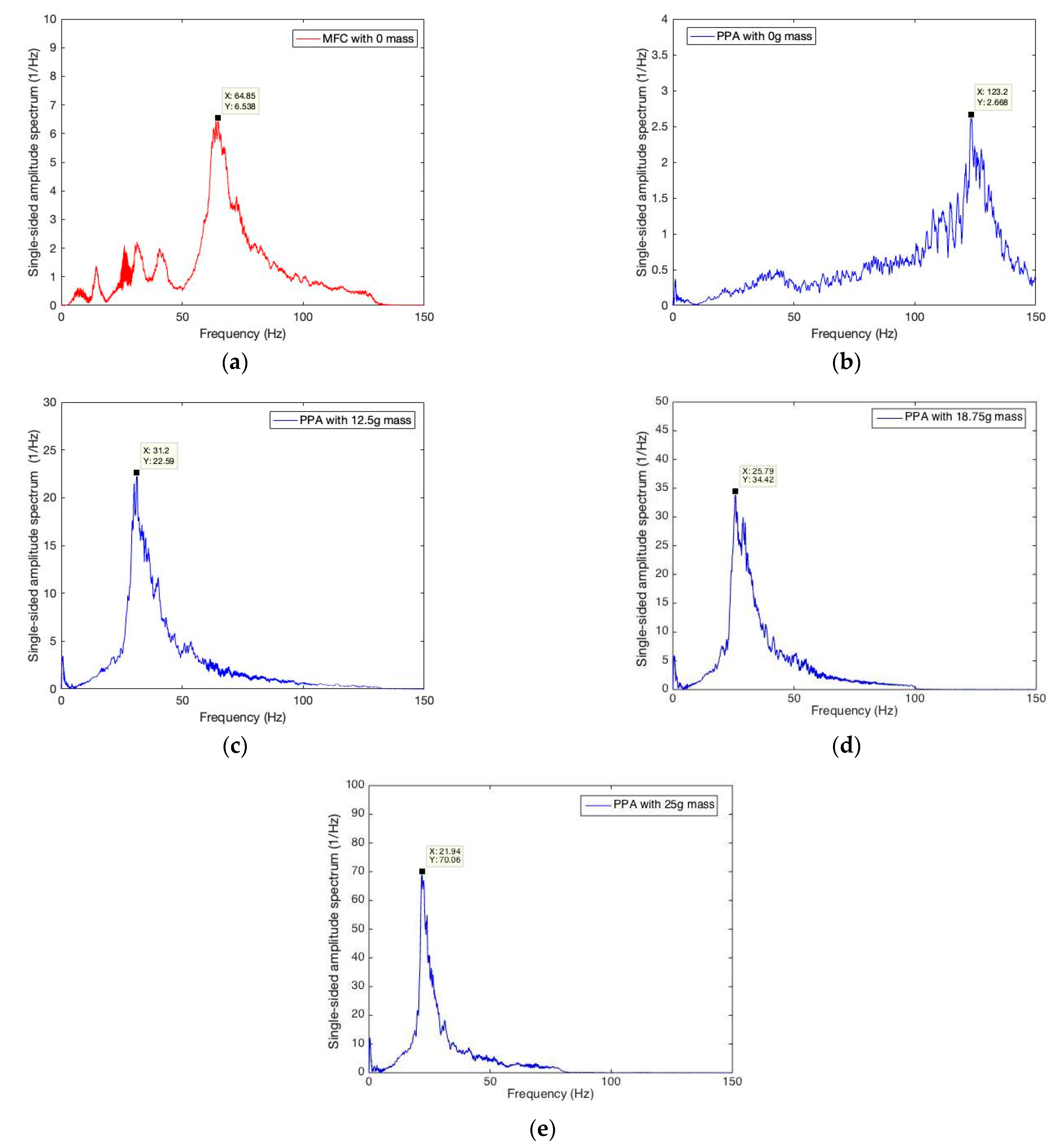
2.3.1. Resonant Frequency Determination
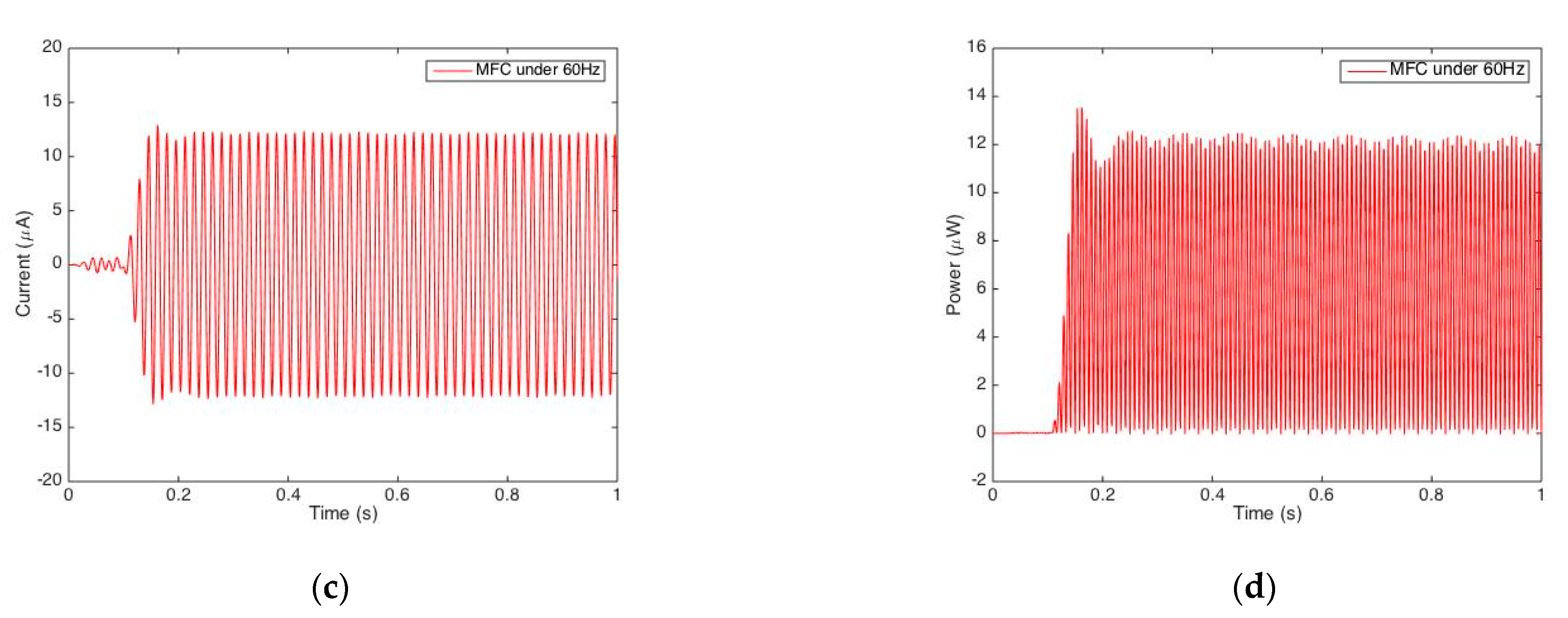
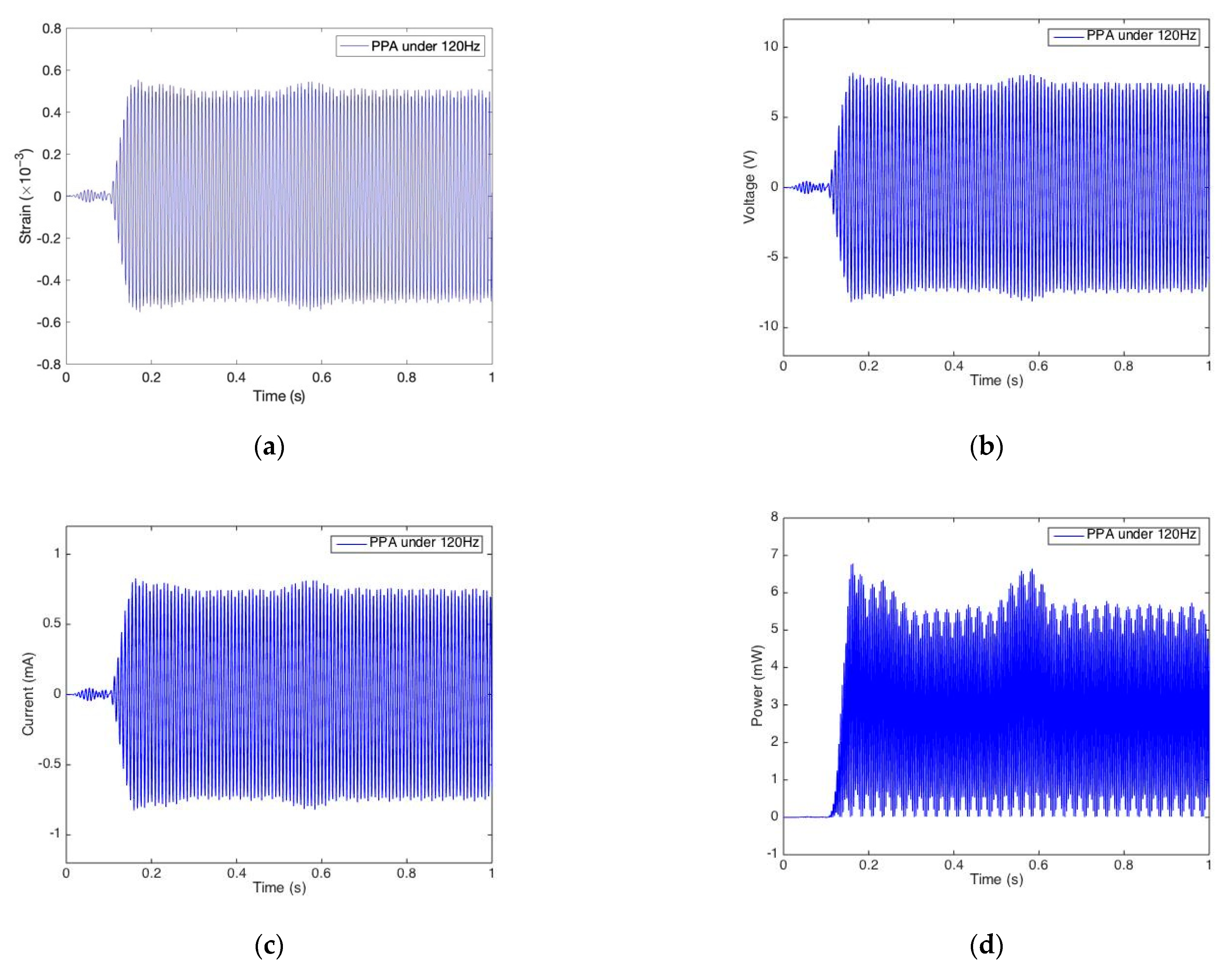
2.3.2. Harvesting Capability Comparison
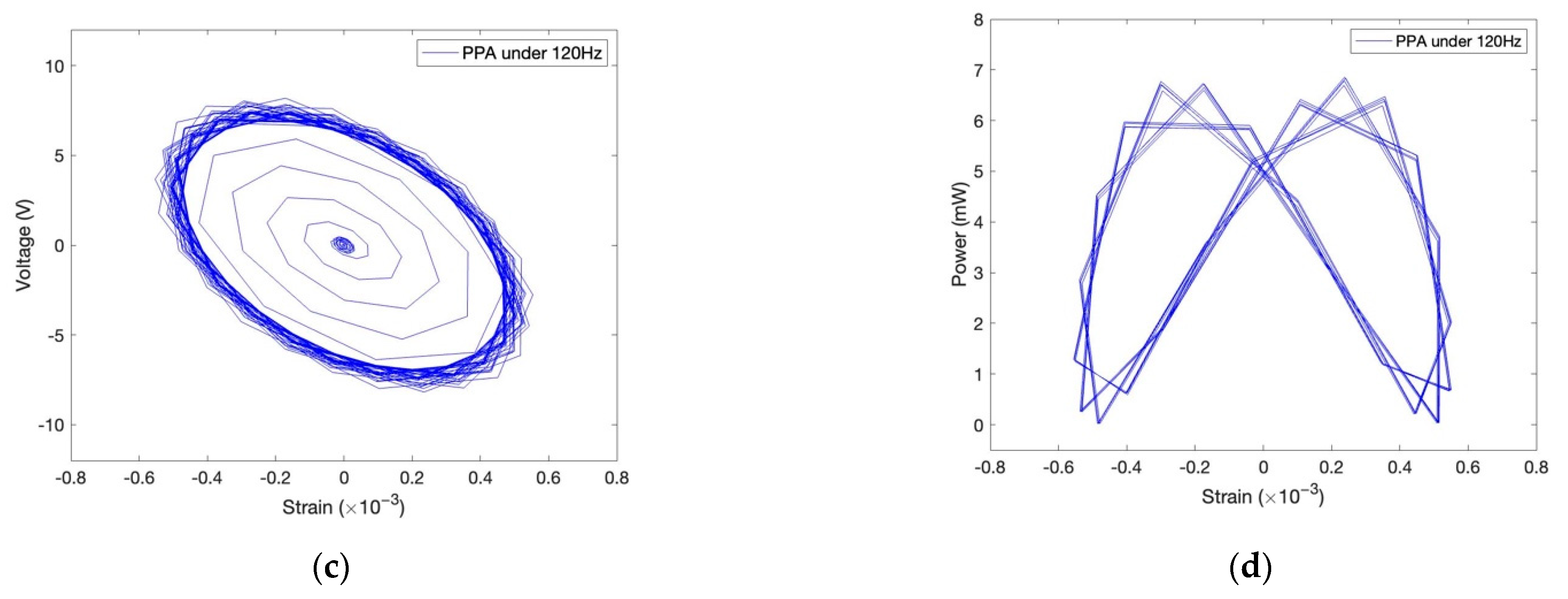
2.3.3. Harvesting Characteristic Investigation
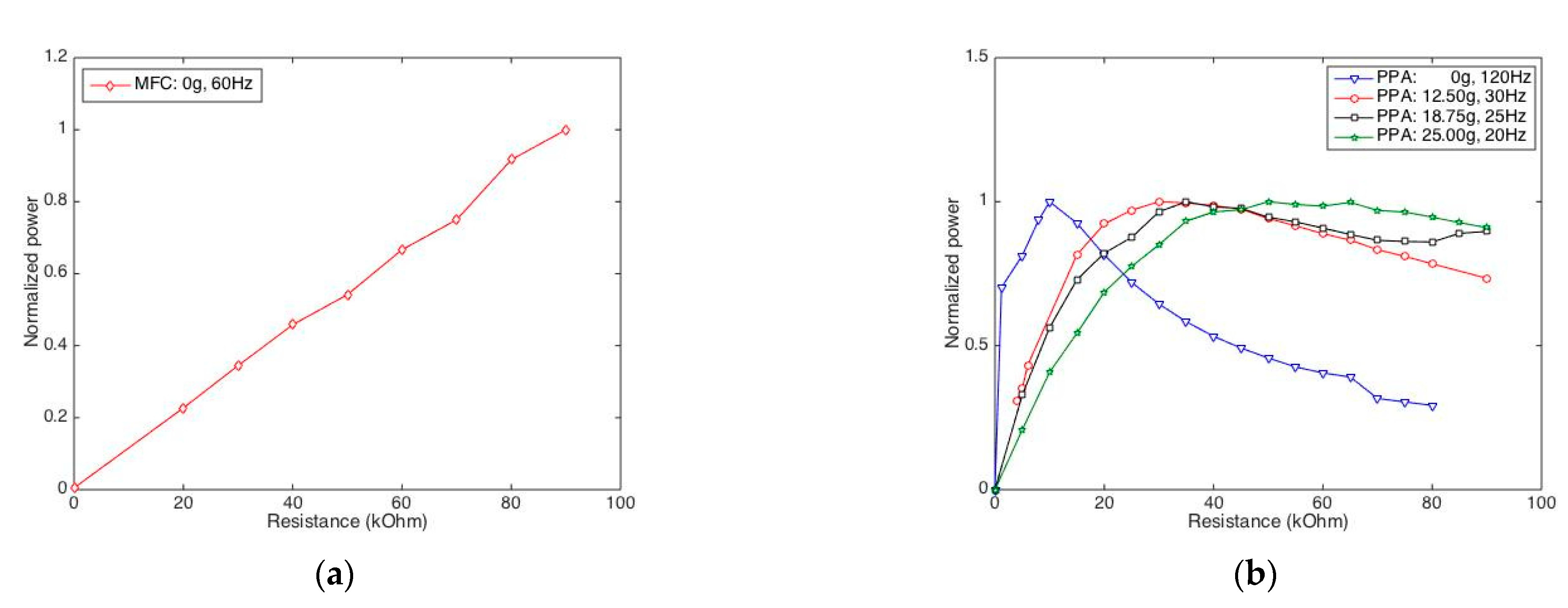
2.3.4. Rational Resistance Determination
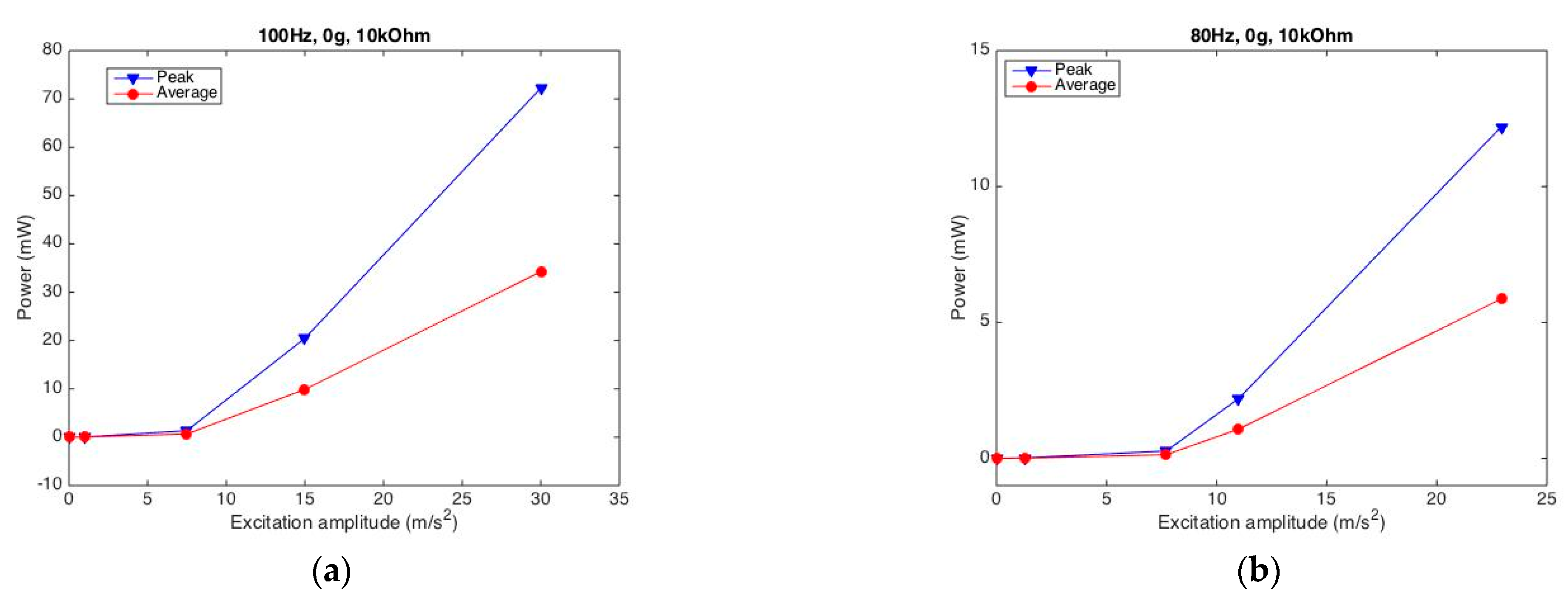
2.3.5. Appropriate Excitation Amplitude Determination
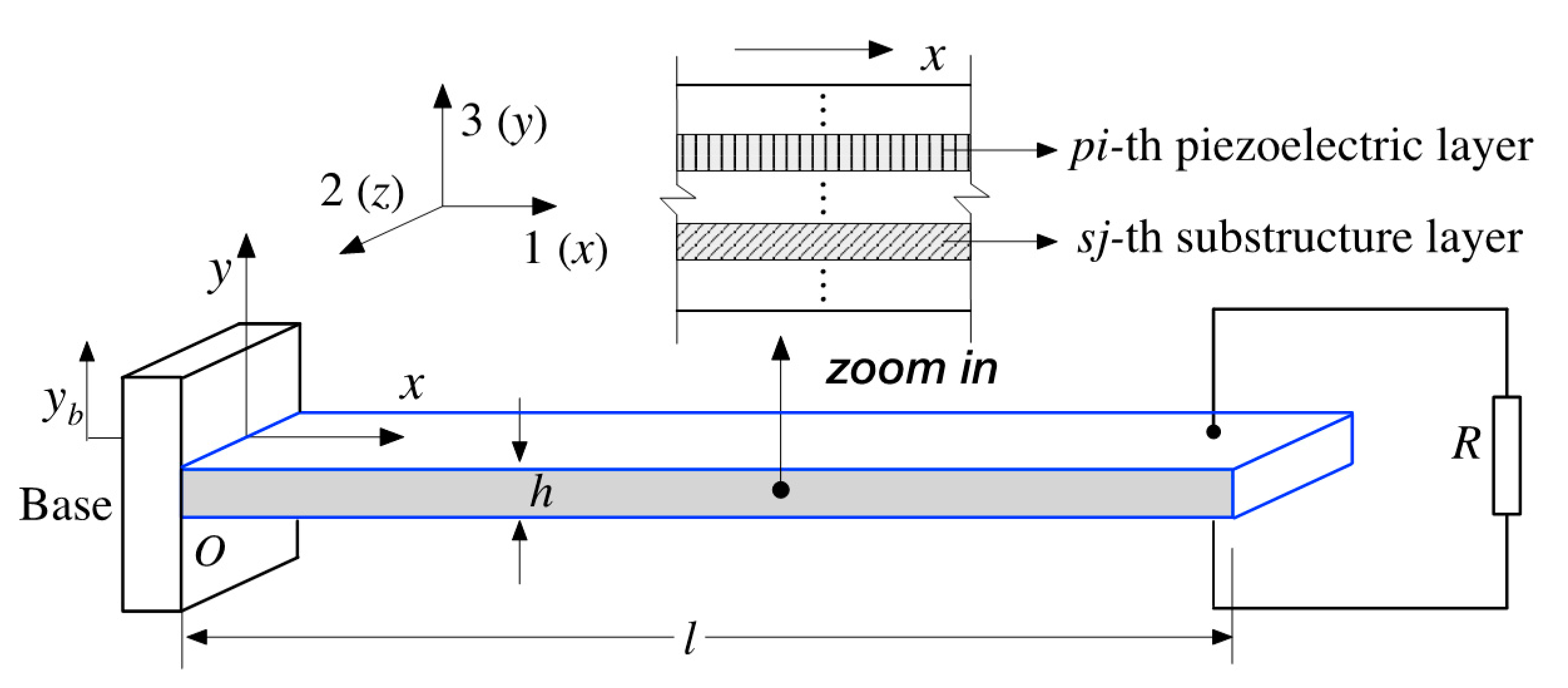
3. Coupled Electromechanical Modeling
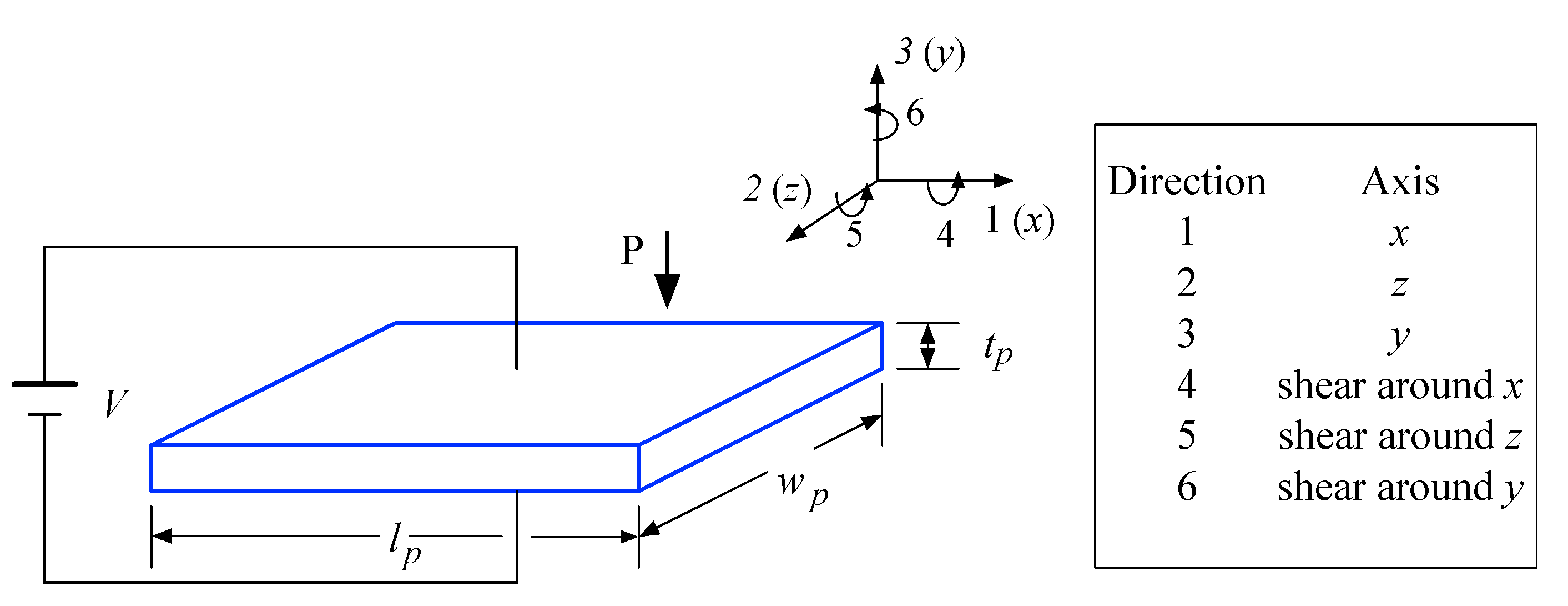
3.1. Piezoelectric Basic Equation
3.2. Coupled Electromechanical Model
3.2.1. Coupled Mechanical Equations
3.2.2. Coupled Electric Equations
3.2.3. Coupled Electromechanical Equations
3.3. Coupled Equations’ Solutions
4. Coupled Electromechanical Modeling by Using Identified Parameters
4.1. Model Parameters
- (1)
- Parameter represents the center-to-center interdigitated electrode spacing (assumed as the thickness) of the -th piezoelectric layer. It is simplified on the assumption that identical and electric fields at each layer are equally distracted, which may cause the model’s result to be not accurate enough.
- (2)
- Parameter represents (equivalent) the distance from the neutral axis of the structural cross section to the center of the piezoelectric layer. Similar to , it is simplified on the assumptions that identical electric fields at each layer are equally distracted. In addition, it could be even harder to assign when the harvester has multiple piezoelectric layers, and how to propose its proper equivalent value is another issue.
- (3)
- Parameter represents the equivalent bending stiffness of the composite cross section for the constant electric field condition. In order to obtain its value, simplified relations (referred in Equation (10)) are commonly proposed based on some inevitable assumptions by ignoring non-uniformity field and coupling effect within layers.
- (4)
- Parameter represents the coupling geometric coefficient that is comprehensively dependent on the thickness of every layer in the harvester, and also dependents on the circuit connection method. In general, it is a complicated coefficient that is not direct and easy to obtain accurately.
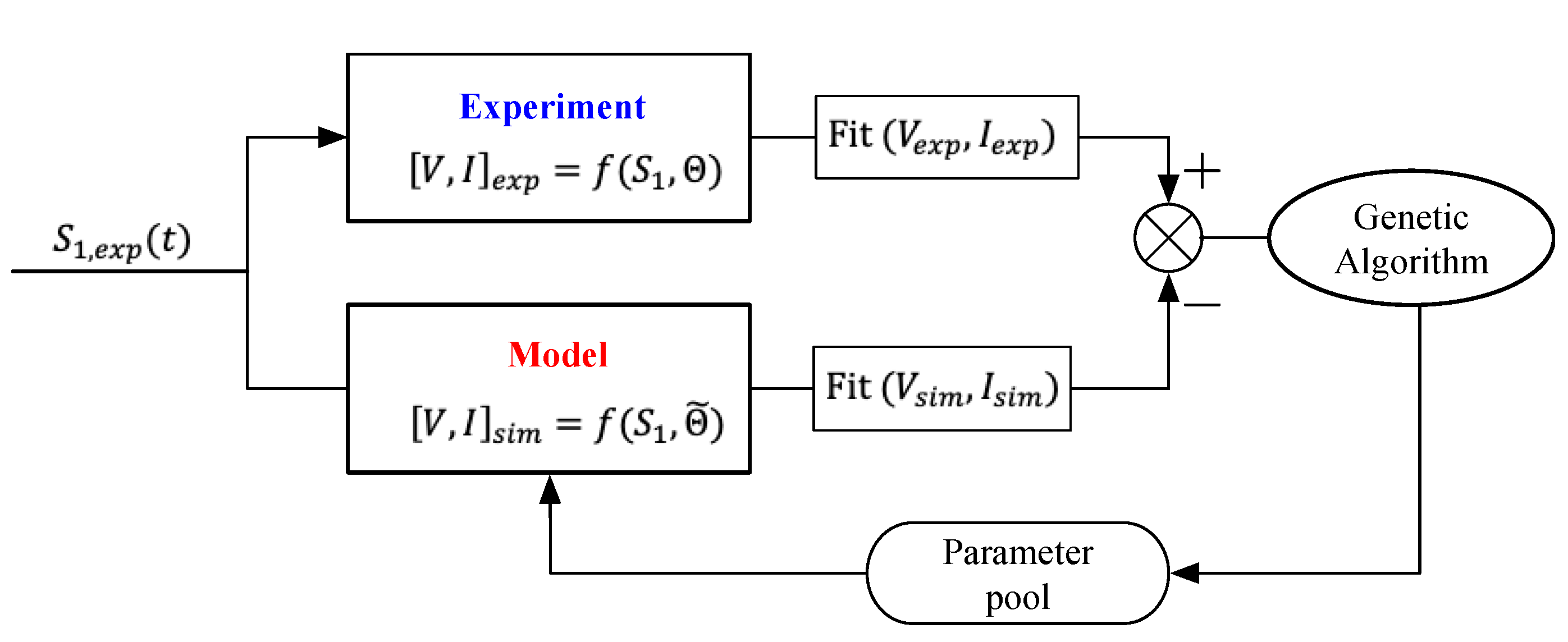
4.2. Parameter Identification Procedure
4.3. Genetic Algorithm (GA) Detail
- (1)
- Chromosome representation
- (2)
- Fitness function
- (3)
- Termination strategy
5. Model Validation with Experimental Data
5.1. Comparison of Model and Experimental Data
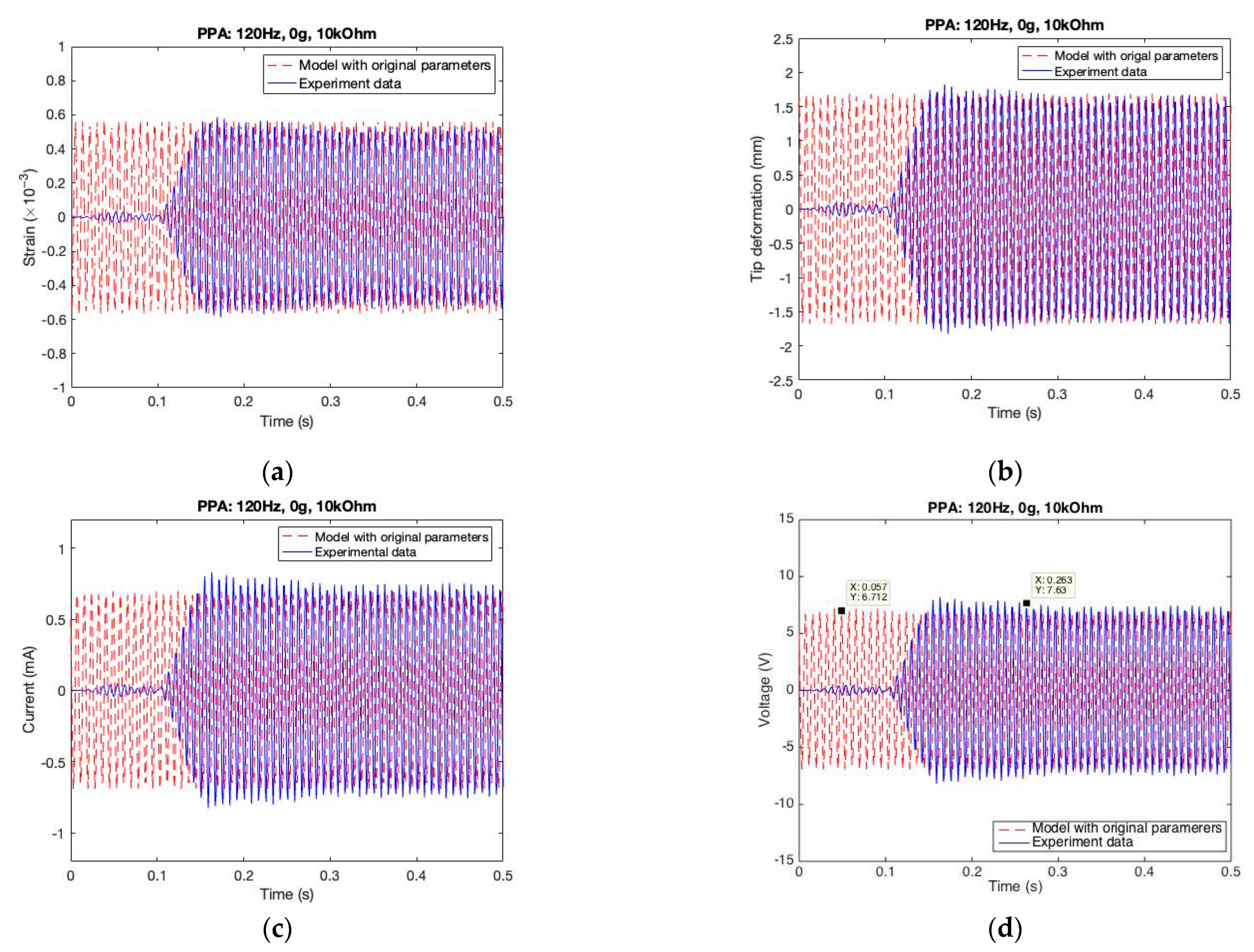
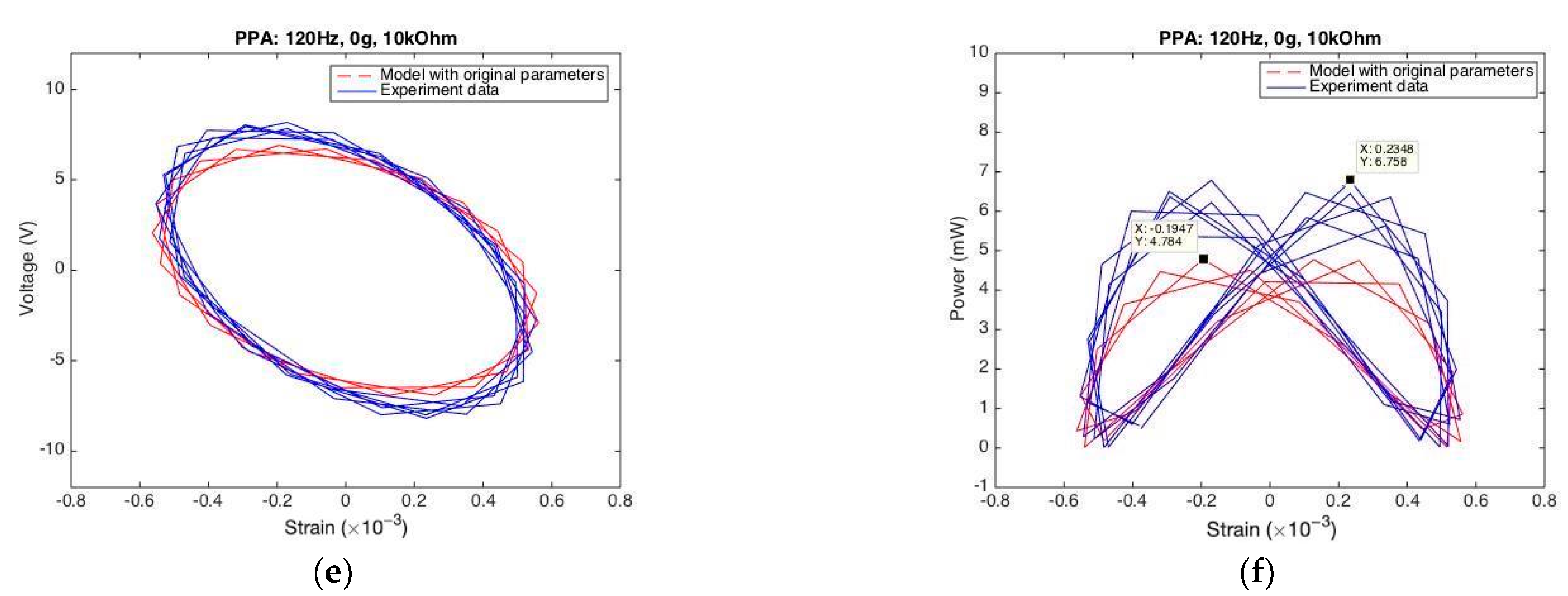
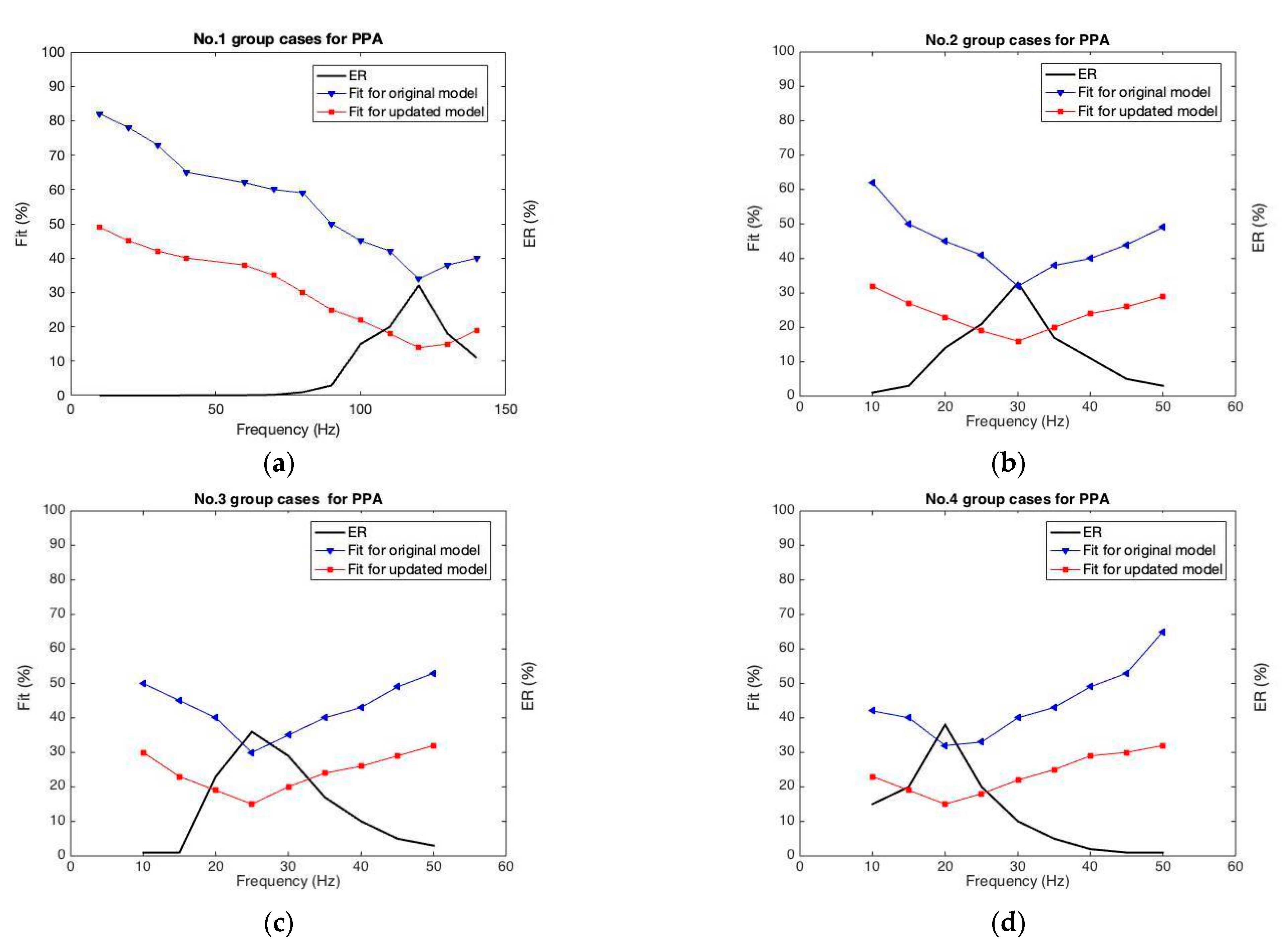
5.1.1. Original Model (without Original Parameters)
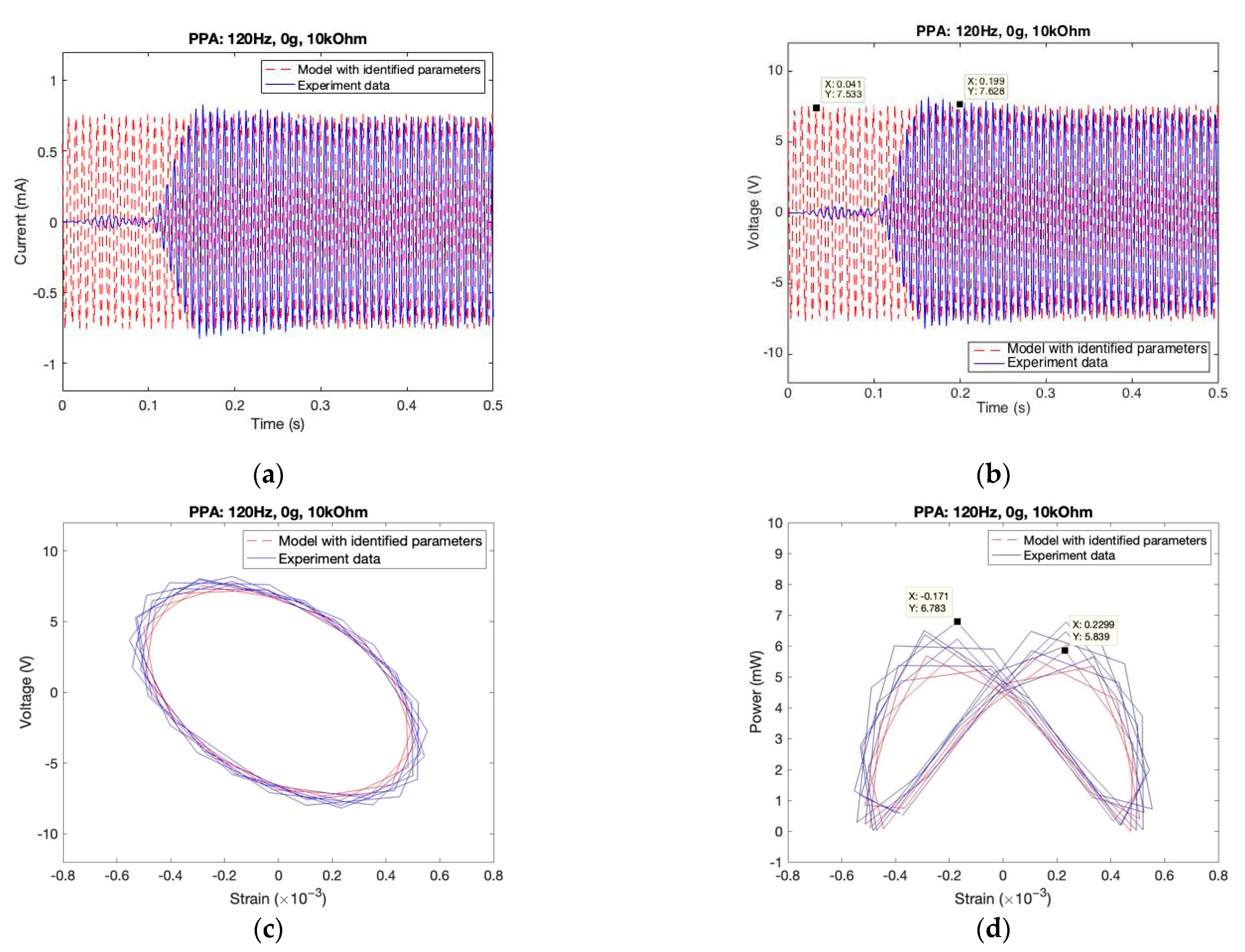
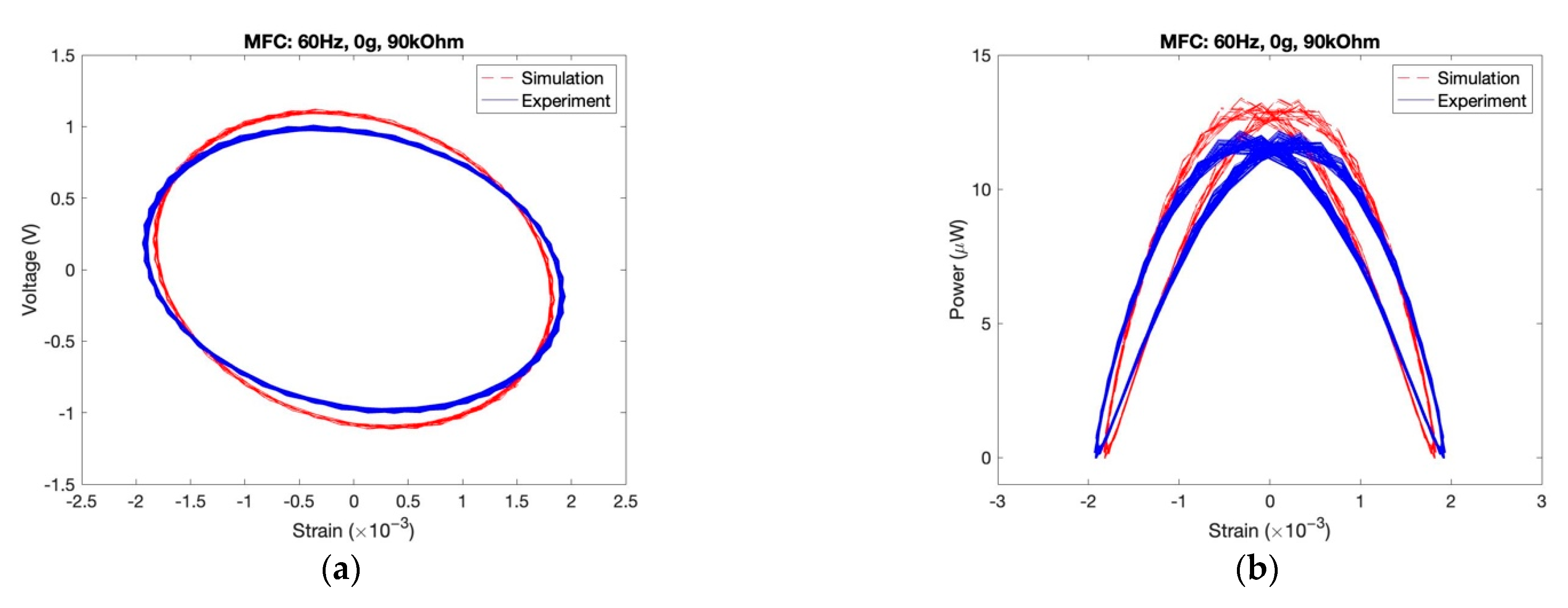
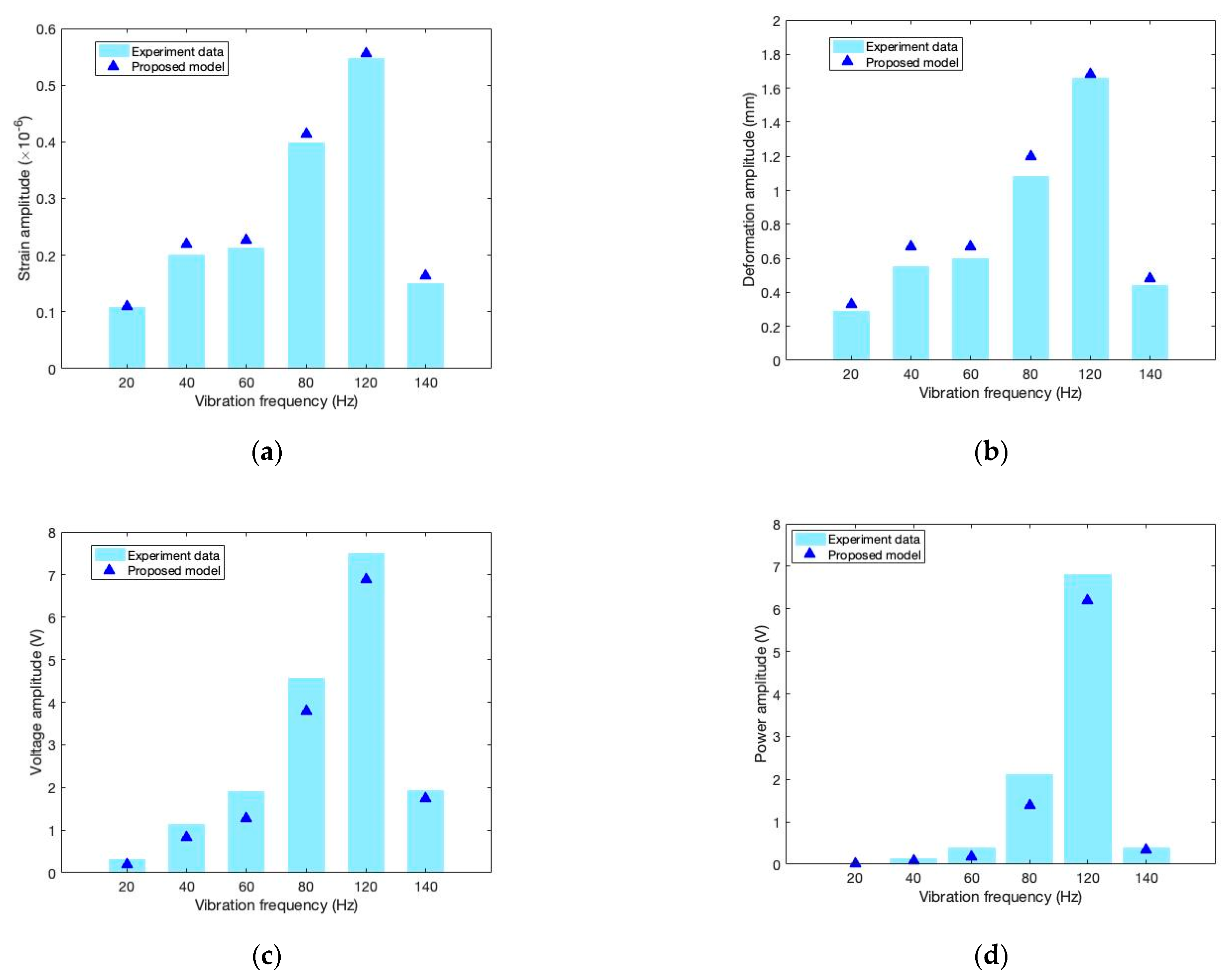
5.1.2. Proposed Model (with Updated Parameters)
5.2. Error Analysis
5.3. Change Analysis of Responses with Vibration Frequency
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aridogan, U.; Basdogan, I.; Erturk, A. Analytical modeling and experimental validation of a structurally integrated piezoelectric energy harvester on a thin plate. Smart Mater. Struct. 2014, 23, 045039. [Google Scholar] [CrossRef]
- Safaei, M.; Sodano, H.A.; Anton, S.R. A review of energy harvesting using piezoelectric materials: State-of-the-art a decade later (2008–2018). Smart Mater. Struct. 2019, 28, 113001. [Google Scholar] [CrossRef]
- Anton, S.R.; Sodano, H.A. A review of power harvesting using piezoelectric materials (2003–2006). Smart Mater. Struct. 2007, 16, R1. [Google Scholar] [CrossRef]
- Khan, F.U.; Qadir, M.U. State-of-the-art in vibration-based electrostatic energy harvesting. J. Micromechanics Microengineer. 2016, 26, 103001. [Google Scholar] [CrossRef]
- Boisseau, S.; Despesse, G.; Seddik, B.A. Electrostatic conversion for vibration energy harvesting. Small-Scale Energy Harvest. 2012, 31, 1–39. [Google Scholar]
- Moss, S.D.; Payne, O.R.; Hart, G.A.; Ung, C. Scaling and power density metrics of electromagnetic vibration energy harvesting devices. Smart Mater. Struct. 2015, 24, 023001. [Google Scholar] [CrossRef]
- Spreemann, D.; Manoli, Y. Electromagnetic Vibration Energy Harvesting Devices: Architectures, Design, Modeling and Optimization; Springer: Berlin, Germany, 2012; Volume 35. [Google Scholar]
- Mohammadi, S.; Esfandiari, A. Magnetostrictive vibration energy harvesting using strain energy method. Energy 2015, 81, 519–525. [Google Scholar] [CrossRef]
- Narita, F.; Fox, M. A review on piezoelectric, magnetostrictive, and magnetoelectric materials and device technologies for energy harvesting applications. Adv. Eng. Mater. 2018, 20, 1700743. [Google Scholar] [CrossRef] [Green Version]
- Yuan, X.; Changgeng, S.; Yan, G.; Zhenghong, Z. Application review of dielectric electroactive polymers (DEAPs) and piezoelectric materials for vibration energy harvesting. J. Phys. Conf. Ser. 2016, 744, 012077. [Google Scholar] [CrossRef] [Green Version]
- Chandrasekaran, S.; Bowen, C.; Roscow, J.; Zhang, Y.; Dang, D.K.; Kim, E.J.; Misra, R.D.; Deng, L.; Chung, J.S.; Hur, S.H. Micro-scale to nano-scale generators for energy harvesting: Self powered piezoelectric, triboelectric and hybrid devices. Phys. Rep. 2019, 792, 1–33. [Google Scholar] [CrossRef]
- Liu, H.; Quan, C.; Tay, C.J.; Kobayashi, T.; Lee, C. A MEMS-based piezoelectric cantilever patterned with PZT thin film array for harvesting energy from low frequency vibrations. Phys. Procedia 2011, 19, 129–133. [Google Scholar] [CrossRef] [Green Version]
- Montanini, R.; Quattrocchi, A. Experimental characterization of cantilever-type piezoelectric generator operating at resonance for vibration energy harvesting. In Proceedings of the AIP Conference, Ancona, Italy, 29 June–1 July 2016; Volume 1740, p. 060003. [Google Scholar]
- Aramaki, M.; Yoshimura, T.; Murakami, S.; Kanda, K.; Fujimura, N. Electromechanical characteristics of piezoelectric vibration energy harvester with 2-degree-of-freedom system. Appl. Phys. Lett. 2019, 114, 133902. [Google Scholar] [CrossRef]
- Usharani, R.; Uma, G.; Umapathy, M.; Choi, S.B. A new piezoelectric-patched cantilever beam with a step section for high performance of energy harvesting. Sens. Actuators A Phys. 2017, 265, 47–61. [Google Scholar] [CrossRef]
- Morimoto, K.; Kanno, I.; Wasa, K.; Kotera, H. High-efficiency piezoelectric energy harvesters of c-axis-oriented epitaxial PZT films transferred onto stainless steel cantilevers. Sens. Actuators A Phys. 2010, 163, 428–432. [Google Scholar] [CrossRef]
- Roundy, S.; Wright, P.K.; Rabaey, J. A Study of Low Level Vibrations as a Power Source for Wireless Sonsor Nodes. Comput. Commun. 2003, 26, 1131–1144. [Google Scholar] [CrossRef]
- Dutoit, N.E.; Wardle, B.L.; Kim, S.G. Design considerations for MEMS-scale piezoelectric mechanical vibration energy harvesters. Integr. Ferroelectr. 2005, 71, 121–160. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. A Distributed Parameter Electromechanical Model for Cantilevered Piezoelectric Energy Harvesters. J. Vib. Acoust. 2008, 130, 1257–1261. [Google Scholar] [CrossRef]
- Sodano, H.A.; Park, G.; Inman, D.J. Estimation of Electric Charge Output for Piezoelectric Energy Harvesting. Strain 2004, 40, 49–58. [Google Scholar] [CrossRef]
- Chen, S.-N.; Wang, G.-J.; Chien, M.-C. Analytical modeling of piezoelectric vibration-induced micro power generator. Mechatronics 2006, 16, 379–387. [Google Scholar] [CrossRef]
- Hagood, N.W.; Chung, W.H.; Von Flotow, A. Modelling of piezoelectric actuator dynamics for active structural control. J. Intell. Mater. Syst. Struct. 1990, 1, 327–354. [Google Scholar] [CrossRef]
- Ajitsaria, J.; Choe, S.Y.; Shen, D.; Kim, D.J. Modeling and analysis of a bimorph piezoelectric cantilever beam for voltage generation. Smart Mater. Struct. 2007, 16, 447. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. An experimentally validated bimorph cantilever model for piezoelectric energy harvesting from base excitations. Smart Mater. Struct. 2009, 18, 25009–25018. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Type | Harmonic Frequency | Optimal Resistance | Normalized Max/Mean Power |
|---|---|---|---|
| (Hz) | (kOhm) | ||
| MFC | 64.85 | - | |
| PPA with 0 g mass | 123.20 | 10 | 12.83/5.31 |
| PPA with 12.5 g mass | 31.20 | 30 | 7.16/2.94 |
| PPA with 18.75 g mass | 25.79 | 35 | 3.69/1.70 |
| PPA with 25 g mass | 21.94 | 50 | 2.32/0.98 |
| Parameter | Unit | PPA | MFC | ||
|---|---|---|---|---|---|
| Original | Optimized | Original | Optimized | ||
| 50 | 49.63 | - | 23.32 | ||
| 150 | 129.74 | - | 0.5458 | ||
| 107 | 106.2 | - | 1.558 | ||
| 10 | 11.88 | - | 0. 8994 | ||
| Equivalent Error (EE) (%) | |||||
|---|---|---|---|---|---|
| No. 1 Group | No. 2 Group | No. 3 Group | No. 4 Group | Average | |
| Model with original parameters | 38.77 | 42.12 | 46.24 | 41.37 | 42.04 |
| Model with optimized parameters | 16.92 | 21.83 | 25.19 | 21.2 | 21.85 |
| EE improved by | 56.36 | 48.17 | 45.52 | 48.76 | 48.03 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, X.; Sun, Q.; Ma, Q.; Wang, J. A Versatile Model for Describing Energy Harvesting Characteristics of Composite-Laminated Piezoelectric Cantilever Patches. Sensors 2022, 22, 4457. https://doi.org/10.3390/s22124457
Xue X, Sun Q, Ma Q, Wang J. A Versatile Model for Describing Energy Harvesting Characteristics of Composite-Laminated Piezoelectric Cantilever Patches. Sensors. 2022; 22(12):4457. https://doi.org/10.3390/s22124457
Chicago/Turabian StyleXue, Xiaomin, Qing Sun, Qiangli Ma, and Jiajia Wang. 2022. "A Versatile Model for Describing Energy Harvesting Characteristics of Composite-Laminated Piezoelectric Cantilever Patches" Sensors 22, no. 12: 4457. https://doi.org/10.3390/s22124457