
Top-Down System for Multi-Person 3D Absolute Pose Estimation from Monocular Videos




Abstract
:1. Introduction
- The proposal of an integrated top-down framework based on a modified GAST-Net and RootNet networks for multi-person 3D pose estimation from a monocular RGB video in a short execution time.
- Outperforming existing 3D multi-person absolute pose estimation methods in a MuPoTS-3D dataset by more than 8.8 percentage points on 3D-PCKabs and by more than 12.6 percentage points on AP.
2. Related Works
2.1. Two-Stage Pose Estimation
2.2. Video Pose Estimation
2.3. Spatial–Temporal Graph Convolution Network
2.4. Multi-Person 3D Pose Estimation
3. Framework Overview
3.1. Basic Models Architectures
3.2. Taxonomy of the Framework
3.3. 3D Absolute Pose Estimator
4. Experimentation and Results Discussion
4.1. Datasets and Evaluation Metrics
4.2. Implementation Details
4.3. Results
4.3.1. Evaluation of Multi-Person Dataset MuPoTS

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Year | PCK | AUC | 3D-PCK | AP |
|---|---|---|---|---|---|
| 3D MPPE PoseNet [31] | 2019 | 81.8 | 39.8 | 31.5 | 31.0 |
| HDNet [32] | 2020 | 83.7 | - | 35.2 | 39.4 |
| SMAP [33] | 2020 | 80.5 | 45.5 | 38.7 | 45.5 |
| HMOR [69] | 2020 | 82.0 | 43.5 | 43.8 | - |
| GnTCN [35] | 2021 | 87.5 | 48.9 | 45.7 | 45.2 |
| TDBU_Net [36] | 2021 | 89.6 | 50.6 | 48.0 | 46.3 |
| DAS [74] | 2022 | 82.7 | - | 39.2 | - |
| Root-GAST with GR | - | 63.8 | 30.6 | 54.7 | 58.4 |
| Root-GAST with GA | - | 82.5 | 45.3 | 56.1 | 56.8 |
| Root-GAST with GAR | - | 82.5 | 45.3 | 56.8 | 58.9 |
| Method | S1 | S2 | S3 | S4 | S5 | S6 | S7 |
| 3D MPPE PoseNet (*) [31] | 59.5 | 45.3 | 51.4 | 46.2 | 53.0 | 27.4 | 23.7 |
| HDNet [32] | 21.4 | 22.7 | 58.3 | 27.5 | 37.3 | 12.2 | 49.2 |
| SMAP (*) [33] | 42.1 | 41.4 | 46.5 | 16.3 | 53.0 | 26.4 | 47.5 |
| GnTCN (*) [35] | 64.7 | 59.3 | 59.4 | 63.1 | 52.6 | 42.7 | 31.9 |
| TDBU_Net [36] | 69.2 | 57.1 | 49.3 | 68.9 | 55.1 | 36.1 | 49.4 |
| Root-GAST with GAR (*) | 89.8 | 77.0 | 73.4 | 77.0 | 81.0 | 54.3 | 68.4 |
| Method | S8 | S9 | S10 | S11 | S12 | S13 | S14 |
| 3D MPPE PoseNet (*) [31] | 26.4 | 39.1 | 23.6 | 8.3 | 14.9 | 38.2 | 29.5 |
| HDNet [32] | 40.8 | 53.1 | 43.9 | 43.2 | 43.6 | 39.7 | 28.3 |
| SMAP (*) [33] | 18.7 | 36.7 | 73.5 | 46.0 | 22.7 | 24.3 | 38.9 |
| GnTCN (*) [35] | 35.2 | 53.0 | 28.3 | 37.6 | 26.7 | 46.3 | 44.5 |
| TDBU_Net [36] | 33.0 | 43.5 | 52.8 | 48.8 | 36.5 | 51.2 | 37.1 |
| Root-GAST with GAR (*) | 60.5 | 71.3 | 65.4 | 33.5 | 26.1 | 67.3 | 46.9 |
| Method | S15 | S16 | S17 | S18 | S19 | S20 | Avg |
| 3D MPPE PoseNet (*) [31] | 36.8 | 23.6 | 14.4 | 20.0 | 18.8 | 25.4 | 31.8 |
| HDNet [32] | 49.5 | 23.8 | 18.0 | 26.9 | 25.0 | 38.8 | 35.2 |
| SMAP (*) [33] | 47.5 | 34.2 | 35.0 | 20.0 | 38.7 | 64.8 | 38.7 |
| GnTCN (*) [35] | 50.2 | 47.9 | 39.4 | 23.5 | 61.0 | 56.1 | 46.3 |
| TDBU_Net [36] | 47.3 | 52.0 | 20.3 | 43.7 | 57.5 | 50.4 | 48.0 |
| Root-GAST with GAR (*) | 66.9 | 35.7 | 40.1 | 38.5 | 26.0 | 35.3 | 56.8 |
4.3.2. Evaluation on Single-Person Dataset Human3.6M
4.3.3. Response Time
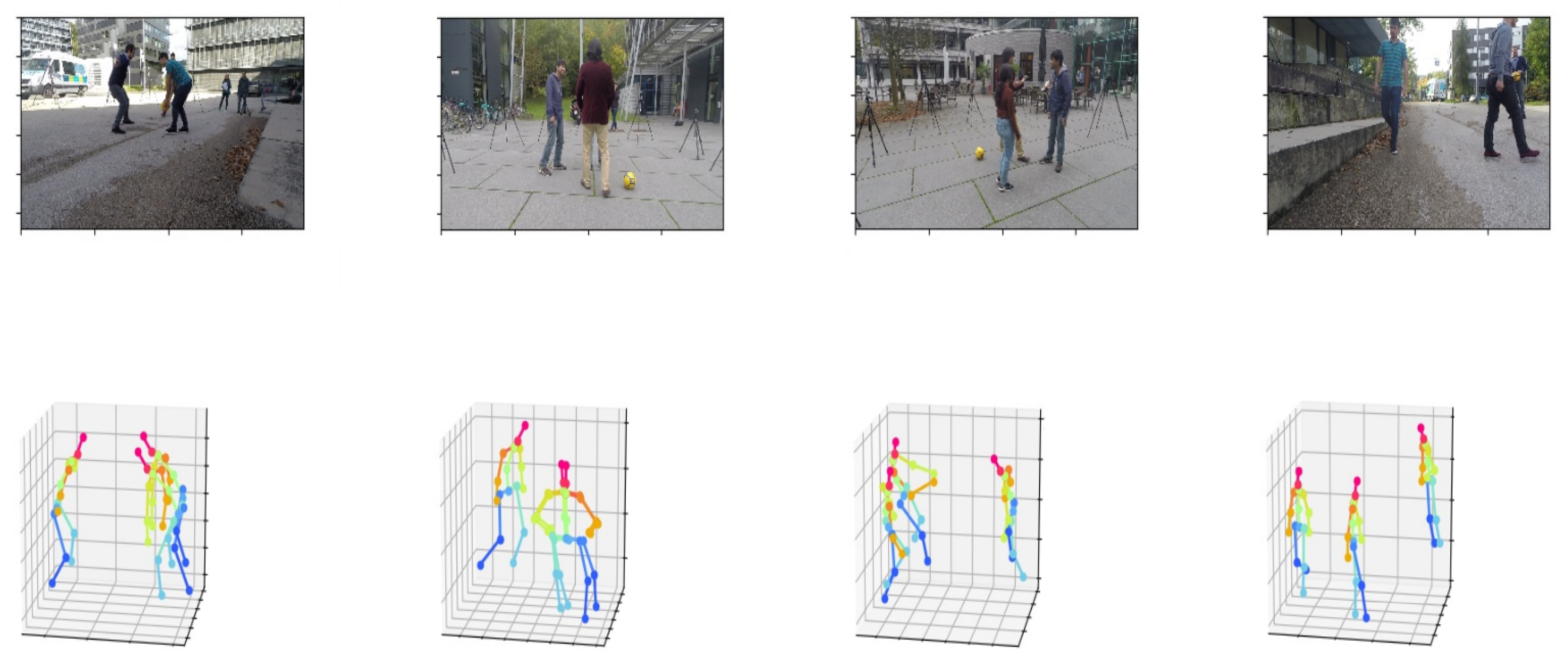
4.3.4. Qualitative Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| HPE | human pose estimation |
| LSTM | long short-term memory |
| GNN | graph neural network |
| GCN | graph convolution network |
| TCN | temporal convolutional network |
| RNN | recurrent neural network |
| MPJPE | mean per joint position error |
| MRPE | mean of the root position error |
| AUC | area under the curve |
| 3D-PCK | percentage of correct key-points in 3D space |
| AP | average precision of the root keypoint |
| GPU | graphics processing unit |
| GR | first 3D absolute pose methodology: GAST-Net + RootNet |
| GA | second 3D absolute pose methodology: GAST-Net trained on MuCo-Temp |
| GAR | third 3D absolute pose methodology: GAST-Net trained on MuCo-Temp + RootNet |
| Root-GAST | the whole pipeline: human detector + 2D pose estimator + 3D absolute pose estimator |
References
- Treleaven, P.; Wells, J. 3D body scanning and healthcare applications. Computer 2007, 40, 28–34. [Google Scholar] [CrossRef] [Green Version]
- Grazioso, S.; Selvaggio, M.; Di Gironimo, G. Design and development of a novel body scanning system for healthcare applications. Int. J. Interact. Des. Manuf. 2018, 12, 611–620. [Google Scholar] [CrossRef]
- Chromy, A.; Zalud, L. The RoScan thermal 3D body scanning system: Medical applicability and benefits for unobtrusive sensing and objective diagnosis. Sensors 2020, 20, 6656. [Google Scholar] [CrossRef] [PubMed]
- Liberadzki, P.; Adamczyk, M.; Witkowski, M.; Sitnik, R. Structured-light-based system for shape measurement of the human body in motion. Sensors 2018, 18, 2827. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nezami, F.N.; Wächter, M.A.; Maleki, N.; Spaniol, P.; Kühne, L.M.; Haas, A.; Pingel, J.M.; Tiemann, L.; Nienhaus, F.; Keller, L.; et al. Westdrive X LoopAR: An Open-Access Virtual Reality Project in Unity for Evaluating User Interaction Methods during Takeover Requests. Sensors 2021, 21, 1879. [Google Scholar] [CrossRef]
- Ku Abd. Rahim, K.N.; Elamvazuthi, I.; Izhar, L.I.; Capi, G. Classification of human daily activities using ensemble methods based on smartphone inertial sensors. Sensors 2018, 18, 4132. [Google Scholar] [CrossRef] [Green Version]
- Michonski, J.; Witkowski, M.; Sitnik, R.; Glinkowski, W.M. Automatic recognition of surface landmarks of anatomical structures of back and posture. J. Biomed. Opt. 2012, 17, 056015. [Google Scholar] [CrossRef] [Green Version]
- Čibiraitė-Lukenskienė, D.; Ikamas, K.; Lisauskas, T.; Krozer, V.; Roskos, H.G.; Lisauskas, A. Passive detection and imaging of human body radiation using an uncooled field-effect transistor-based THz detector. Sensors 2020, 20, 4087. [Google Scholar] [CrossRef]
- Reddy, N.D.; Guigues, L.; Pishchulin, L.; Eledath, J.; Narasimhan, S.G. TesseTrack: End-to-End Learnable Multi-Person Articulated 3D Pose Tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 15190–15200. [Google Scholar]
- He, Y.; Yan, R.; Fragkiadaki, K.; Yu, S.I. Epipolar transformers. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 7779–7788. [Google Scholar]
- Iskakov, K.; Burkov, E.; Lempitsky, V.; Malkov, Y. Learnable triangulation of human pose. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 7718–7727. [Google Scholar]
- Qiu, H.; Wang, C.; Wang, J.; Wang, N.; Zeng, W. Cross view fusion for 3d human pose estimation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 4342–4351. [Google Scholar]
- Gordon, B.; Raab, S.; Azov, G.; Giryes, R.; Cohen-Or, D. FLEX: Parameter-free Multi-view 3D Human Motion Reconstruction. arXiv 2021, arXiv:2105.01937. [Google Scholar]
- Zhang, Y.; Wang, C.; Wang, X.; Liu, W.; Zeng, W. Voxeltrack: Multi-person 3d human pose estimation and tracking in the wild. IEEE Trans. Pattern Anal. Mach. Intell. 2022. [Google Scholar] [CrossRef]
- Tekin, B.; Márquez-Neila, P.; Salzmann, M.; Fua, P. Learning to fuse 2d and 3d image cues for monocular body pose estimation. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 3941–3950. [Google Scholar]
- Moreno-Noguer, F. 3d human pose estimation from a single image via distance matrix regression. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2823–2832. [Google Scholar]
- Lee, H.J.; Chen, Z. Determination of 3D human body postures from a single view. Comput. Vision Graph. Image Process. 1985, 30, 148–168. [Google Scholar] [CrossRef]
- Zhou, X.; Zhu, M.; Pavlakos, G.; Leonardos, S.; Derpanis, K.G.; Daniilidis, K. Monocap: Monocular human motion capture using a cnn coupled with a geometric prior. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 41, 901–914. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ghezelghieh, M.F.; Kasturi, R.; Sarkar, S. Learning camera viewpoint using CNN to improve 3D body pose estimation. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 685–693. [Google Scholar]
- Wu, J.; Xue, T.; Lim, J.J.; Tian, Y.; Tenenbaum, J.B.; Torralba, A.; Freeman, W.T. Single image 3d interpreter network. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 365–382. [Google Scholar]
- Sun, X.; Xiao, B.; Wei, F.; Liang, S.; Wei, Y. Integral human pose regression. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 529–545. [Google Scholar]
- Zhao, L.; Peng, X.; Tian, Y.; Kapadia, M.; Metaxas, D.N. Semantic graph convolutional networks for 3D human pose regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3425–3435. [Google Scholar]
- Sun, K.; Xiao, B.; Liu, D.; Wang, J. Deep high-resolution representation learning for human pose estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 5693–5703. [Google Scholar]
- Li, J.; Su, W.; Wang, Z. Simple Pose: Rethinking and Improving a Bottom-up Approach for Multi-Person Pose Estimation. arXiv 2019, arXiv:1911.10529. [Google Scholar] [CrossRef]
- Newell, A.; Yang, K.; Deng, J. Stacked hourglass networks for human pose estimation. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 483–499. [Google Scholar]
- Chen, Y.; Wang, Z.; Peng, Y.; Zhang, Z.; Yu, G.; Sun, J. Cascaded pyramid network for multi-person pose estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7103–7112. [Google Scholar]
- Cao, Z.; Simon, T.; Wei, S.E.; Sheikh, Y. Realtime multi-person 2d pose estimation using part affinity fields. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7291–7299. [Google Scholar]
- Zhang, F.; Zhu, X.; Dai, H.; Ye, M.; Zhu, C. Distribution-aware coordinate representation for human pose estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 7093–7102. [Google Scholar]
- Ionescu, C.; Papava, D.; Olaru, V.; Sminchisescu, C. Human3. 6m: Large scale datasets and predictive methods for 3d human sensing in natural environments. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 36, 1325–1339. [Google Scholar] [CrossRef] [PubMed]
- Sigal, L.; Balan, A.O.; Black, M.J. Humaneva: Synchronized video and motion capture dataset and baseline algorithm for evaluation of articulated human motion. Int. J. Comput. Vis. 2010, 87, 4. [Google Scholar] [CrossRef]
- Moon, G.; Chang, J.Y.; Lee, K.M. Camera distance-aware top-down approach for 3d multi-person pose estimation from a single rgb image. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 10133–10142. [Google Scholar]
- Lin, J.; Lee, G.H. Hdnet: Human depth estimation for multi-person camera-space localization. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 633–648. [Google Scholar]
- Zhen, J.; Fang, Q.; Sun, J.; Liu, W.; Jiang, W.; Bao, H.; Zhou, X. Smap: Single-shot multi-person absolute 3d pose estimation. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 550–566. [Google Scholar]
- Mehta, D.; Sotnychenko, O.; Mueller, F.; Xu, W.; Sridhar, S.; Pons-Moll, G.; Theobalt, C. Single-shot multi-person 3d pose estimation from monocular rgb. In Proceedings of the 2018 International Conference on 3D Vision (3DV), Verona, Italy, 5–8 September 2018; pp. 120–130. [Google Scholar]
- Cheng, Y.; Wang, B.; Yang, B.; Tan, R.T. Graph and temporal convolutional networks for 3d multi-person pose estimation in monocular videos. Proc. AAAI Conf. Artif. Intell. 2021, 4, 12. [Google Scholar]
- Cheng, Y.; Wang, B.; Yang, B.; Tan, R.T. Monocular 3D multi-person pose estimation by integrating top-down and bottom-up networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 7649–7659. [Google Scholar]
- Cheng, Y.; Yang, B.; Wang, B.; Yan, W.; Tan, R.T. Occlusion-aware networks for 3d human pose estimation in video. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 723–732. [Google Scholar]
- Cheng, Y.; Yang, B.; Wang, B.; Tan, R.T. 3d human pose estimation using spatio-temporal networks with explicit occlusion training. Proc. AAAI Conf. Artif. Intell. 2020, 34, 10631–10638. [Google Scholar] [CrossRef]
- Pavllo, D.; Feichtenhofer, C.; Grangier, D.; Auli, M. 3d human pose estimation in video with temporal convolutions and semi-supervised training. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 7753–7762. [Google Scholar]
- Chen, H.; Wang, Y.; Zheng, K.; Li, W.; Chang, C.T.; Harrison, A.P.; Xiao, J.; Hager, G.D.; Lu, L.; Liao, C.H.; et al. Anatomy-aware siamese network: Exploiting semantic asymmetry for accurate pelvic fracture detection in x-ray images. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 239–255. [Google Scholar]
- Lin, J.; Lee, G.H. Trajectory space factorization for deep video-based 3d human pose estimation. arXiv 2019, arXiv:1908.08289. [Google Scholar]
- Li, W.; Zhao, Y.; Liu, Y.; Sun, M.; Waterhouse, G.I.; Huang, B.; Zhang, K.; Zhang, T.; Lu, S. Exploiting Ru-induced lattice strain in CoRu nanoalloys for robust bifunctional hydrogen production. Angew. Chem. 2021, 133, 3327–3335. [Google Scholar] [CrossRef]
- Shan, W.; Lu, H.; Wang, S.; Zhang, X.; Gao, W. Improving Robustness and Accuracy via Relative Information Encoding in 3D Human Pose Estimation. In Proceedings of the 29th ACM International Conference on Multimedia, Nice, France, 21–25 October 2021; pp. 3446–3454. [Google Scholar]
- Martinez, J.; Hossain, R.; Romero, J.; Little, J.J. A simple yet effective baseline for 3d human pose estimation. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2640–2649. [Google Scholar]
- Fang, H.S.; Xu, Y.; Wang, W.; Liu, X.; Zhu, S.C. Learning pose grammar to encode human body configuration for 3d pose estimation. Proc. AAAI Conf. Artif. Intell. 2018, 32, 1. [Google Scholar]
- Gong, K.; Zhang, J.; Feng, J. Poseaug: A differentiable pose augmentation framework for 3d human pose estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 8575–8584. [Google Scholar]
- Zhou, X.; Zhu, M.; Leonardos, S.; Daniilidis, K. Sparse representation for 3D shape estimation: A convex relaxation approach. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1648–1661. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, X.; Zhu, M.; Leonardos, S.; Derpanis, K.G.; Daniilidis, K. Sparseness meets deepness: 3D human pose estimation from monocular video. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4966–4975. [Google Scholar]
- Chen, C.H.; Ramanan, D. 3d human pose estimation= 2d pose estimation+ matching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7035–7043. [Google Scholar]
- Hossain, M.R.I.; Little, J.J. Exploiting temporal information for 3d human pose estimation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 68–84. [Google Scholar]
- Lee, K.; Lee, I.; Lee, S. Propagating lstm: 3d pose estimation based on joint interdependency. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 119–135. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Shen, C.; Li, Y.; Cao, Y.; Liu, Y.; Yan, Y. Exploiting temporal consistency for real-time video depth estimation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 1725–1734. [Google Scholar]
- Kumarapu, L.; Mukherjee, P. AnimePose: Multi-person 3D pose estimation and animation. arXiv 2020, arXiv:2002.02792. [Google Scholar] [CrossRef]
- Lea, C.; Vidal, R.; Reiter, A.; Hager, G.D. Temporal convolutional networks: A unified approach to action segmentation. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 47–54. [Google Scholar]
- Veges, M.; Lorincz, A. Temporal Smoothing for 3D Human Pose Estimation and Localization for Occluded People. In Proceedings of the International Conference on Neural Information Processing, Bangkok, Thailand, 18–22 November 2020; pp. 557–568. [Google Scholar]
- Liu, J.; Guang, Y.; Rojas, J. Gast-net: Graph attention spatio-temporal convolutional networks for 3d human pose estimation in video. arXiv 2020, arXiv:2003.14179. [Google Scholar]
- Mehta, D.; Sridhar, S.; Sotnychenko, O.; Rhodin, H.; Shafiei, M.; Seidel, H.P.; Xu, W.; Casas, D.; Theobalt, C. Vnect: Real-time 3d human pose estimation with a single rgb camera. ACM Trans. Graph. 2017, 36, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Cheema, N.; Hosseini, S.; Sprenger, J.; Herrmann, E.; Du, H.; Fischer, K.; Slusallek, P. Dilated temporal fully-convolutional network for semantic segmentation of motion capture data. arXiv 2018, arXiv:1806.09174. [Google Scholar]
- Li, W.; Liu, H.; Ding, R.; Liu, M.; Wang, P.; Yang, W. Exploiting temporal contexts with strided transformer for 3d human pose estimation. IEEE Trans. Multimed. 2022. [Google Scholar] [CrossRef]
- Yan, S.; Xiong, Y.; Lin, D. Spatial temporal graph convolutional networks for skeleton-based action recognition. In Proceedings of the Thirty-Second AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Cai, Y.; Ge, L.; Liu, J.; Cai, J.; Cham, T.J.; Yuan, J.; Thalmann, N.M. Exploiting spatial-temporal relationships for 3d pose estimation via graph convolutional networks. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 2272–2281. [Google Scholar]
- Qiu, Z.; Qiu, K.; Fu, J.; Fu, D. Dgcn: Dynamic graph convolutional network for efficient multi-person pose estimation. Proc. AAAI Conf. Artif. Intell. 2020, 34, 11924–11931. [Google Scholar] [CrossRef]
- Zanfir, A.; Marinoiu, E.; Sminchisescu, C. Monocular 3d pose and shape estimation of multiple people in natural scenes-the importance of multiple scene constraints. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2148–2157. [Google Scholar]
- Rogez, G.; Weinzaepfel, P.; Schmid, C. Lcr-net++: Multi-person 2d and 3d pose detection in natural images. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 42, 1146–1161. [Google Scholar] [CrossRef] [Green Version]
- Pavlakos, G.; Zhou, X.; Derpanis, K.G.; Daniilidis, K. Coarse-to-fine volumetric prediction for single-image 3D human pose. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7025–7034. [Google Scholar]
- Rogez, G.; Weinzaepfel, P.; Schmid, C. Lcr-net: Localization-classification-regression for human pose. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3433–3441. [Google Scholar]
- Benzine, A.; Chabot, F.; Luvison, B.; Pham, Q.C.; Achard, C. Pandanet: Anchor-based single-shot multi-person 3d pose estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 6856–6865. [Google Scholar]
- Li, J.; Wang, C.; Liu, W.; Qian, C.; Lu, C. Hmor: Hierarchical multi-person ordinal relations for monocular multi-person 3d pose estimation. arXiv 2020, arXiv:2008.00206. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Fabbri, M.; Lanzi, F.; Calderara, S.; Alletto, S.; Cucchiara, R. Compressed volumetric heatmaps for multi-person 3d pose estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7204–7213. [Google Scholar]
- Zhang, C.; Zhan, F.; Chang, Y. Deep monocular 3d human pose estimation via cascaded dimension-lifting. arXiv 2021, arXiv:2104.03520. [Google Scholar]
- Zanfir, A.; Marinoiu, E.; Zanfir, M.; Popa, A.I.; Sminchisescu, C. Deep network for the integrated 3d sensing of multiple people in natural images. In Proceedings of the Advances in Neural Information Processing Systems 31 (NeurIPS 2018), Montréal, QC, Canada, 3–8 December 2018. [Google Scholar]
- Wang, Z.; Nie, X.; Qu, X.; Chen, Y.; Liu, S. Distribution-Aware Single-Stage Models for Multi-Person 3D Pose Estimation. arXiv 2022, arXiv:2203.07697. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Liu, J.; Rojas, J.; Li, Y.; Liang, Z.; Guan, Y.; Xi, N.; Zhu, H. A graph attention spatio-temporal convolutional network for 3D human pose estimation in video. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 3374–3380. [Google Scholar]
- Liu, R.; Shen, J.; Wang, H.; Chen, C.; Cheung, S.c.; Asari, V. Attention mechanism exploits temporal contexts: Real-time 3d human pose reconstruction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 5064–5073. [Google Scholar]
- Chen, T.; Fang, C.; Shen, X.; Zhu, Y.; Chen, Z.; Luo, J. Anatomy-aware 3d human pose estimation with bone-based pose decomposition. IEEE Trans. Circuits Syst. Video Technol. 2021, 32, 198–209. [Google Scholar] [CrossRef]
- Kocabas, M.; Athanasiou, N.; Black, M.J. Vibe: Video inference for human body pose and shape estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 5253–5263. [Google Scholar]
- Dabral, R.; Mundhada, A.; Kusupati, U.; Afaque, S.; Sharma, A.; Jain, A. Learning 3d human pose from structure and motion. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 668–683. [Google Scholar]
- Mehta, D.; Rhodin, H.; Casas, D.; Fua, P.; Sotnychenko, O.; Xu, W.; Theobalt, C. Monocular 3d human pose estimation in the wild using improved cnn supervision. In Proceedings of the 2017 International Conference on 3D Vision, Qingdao, China, 10–12 October 2017; pp. 506–516. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Galčík, F.; Gargalík, R. Real-time depth map based people counting. In Proceedings of the International Conference on Advanced Concepts for Intelligent Vision Systems, Poznań, Poland, 28–31 October 2013; pp. 330–341. [Google Scholar]
- Véges, M.; Lorincz, A. Absolute human pose estimation with depth prediction network. In Proceedings of the 2019 International Joint Conference on Neural Networks, Budapest, Hungary, 14–19 July 2019; pp. 1–7. [Google Scholar]





| Method | AP | AP | AP | AP |
|---|---|---|---|---|
| 3D MPPE PoseNet [31] | 31.0 | 21.5 | 10.2 | 2.3 |
| HDNet [32] | 39.4 | 28.0 | 14.6 | 4.1 |
| Root-GAST with GA | 56.8 | 47.1 | 36.8 | 22.4 |
| Method | Year | MPJPE (mm) |
|---|---|---|
| Temporal smoothing [56] | 2020 | 107 |
| Temporal smoothing + Pose refinement [56] | 2020 | 103 |
| Depth Prediction Network [84] | 2019 | 120 |
| LCR-Net [67] | 2017 | 146 |
| Mehta et al. [34] | 2018 | 132 |
| GAST-Net | - | 101.9 |
| Method | MRPE (mm) | MRPE (mm) | MRPE (mm) | MRPE (mm) |
|---|---|---|---|---|
| 3D MPPE PoseNet [31] | 289.28 | 35.95 | 58.65 | 268.49 |
| Root-GAST with GA | 178 | 33 | 41.9 | 158 |
| Model | Min Response Time (ms) | Max Response Time (ms) | Average Response Time (ms) |
|---|---|---|---|
| Yolo-v3 | 24 | 30 | 28 |
| HrNet | 9 | 12 | 10 |
| GAST-Net | 27 | 33 | 29 |
| GAST-Net | 23 | 29 | 26 |
| RootNet | 4 | 8 | 5 |
| Strategy | Average Frame Rate (fps) |
|---|---|
| Root-GAST with GR | 13 |
| Root-GAST with GA | 16 |
| Root-GAST with GAR | 15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Kaid, A.; Brazey, D.; Barra, V.; Baïna, K. Top-Down System for Multi-Person 3D Absolute Pose Estimation from Monocular Videos. Sensors 2022, 22, 4109. https://doi.org/10.3390/s22114109
El Kaid A, Brazey D, Barra V, Baïna K. Top-Down System for Multi-Person 3D Absolute Pose Estimation from Monocular Videos. Sensors. 2022; 22(11):4109. https://doi.org/10.3390/s22114109
Chicago/Turabian StyleEl Kaid, Amal, Denis Brazey, Vincent Barra, and Karim Baïna. 2022. "Top-Down System for Multi-Person 3D Absolute Pose Estimation from Monocular Videos" Sensors 22, no. 11: 4109. https://doi.org/10.3390/s22114109