
On Supporting University Communities in Indoor Wayfinding: An Inclusive Design Approach





Abstract
:1. Introduction
2. Related Work
2.1. Indoor Positioning
2.2. Indoor Navigation Systems for People with Disabilities
3. Design Issues
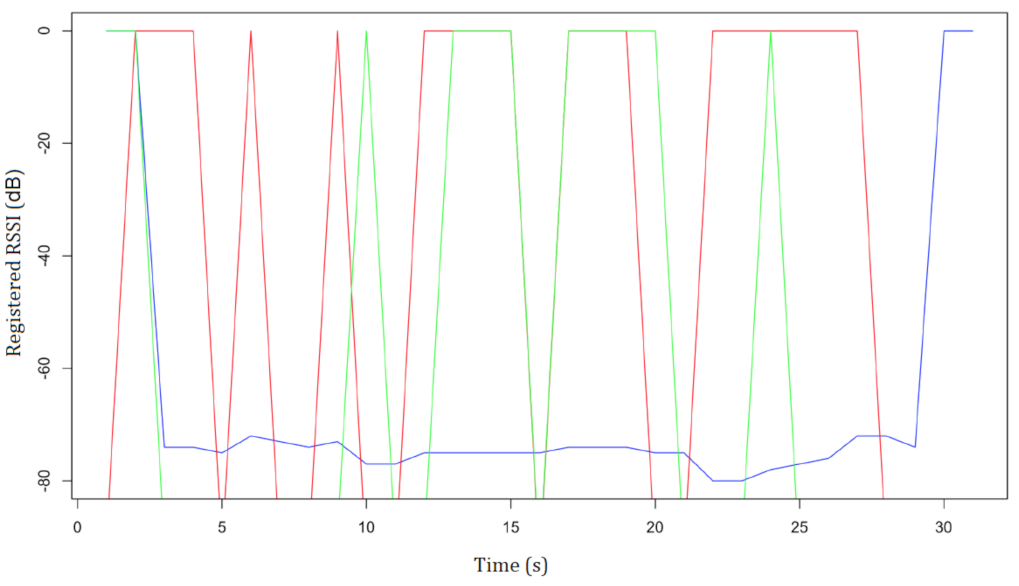
3.1. Localization Techniques
3.2. Universal and Inclusive Design vs. Design for a Specific Need
4. System Walkthrough
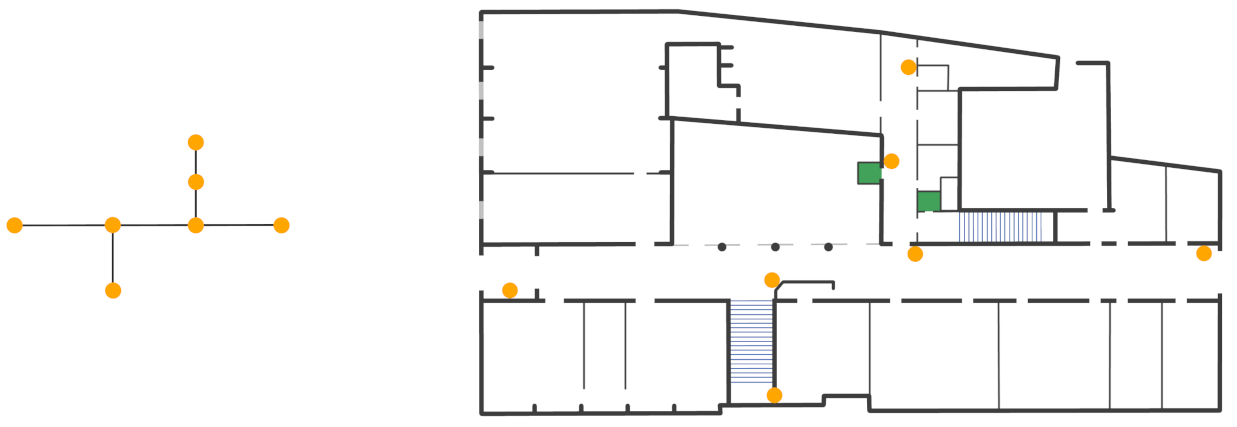
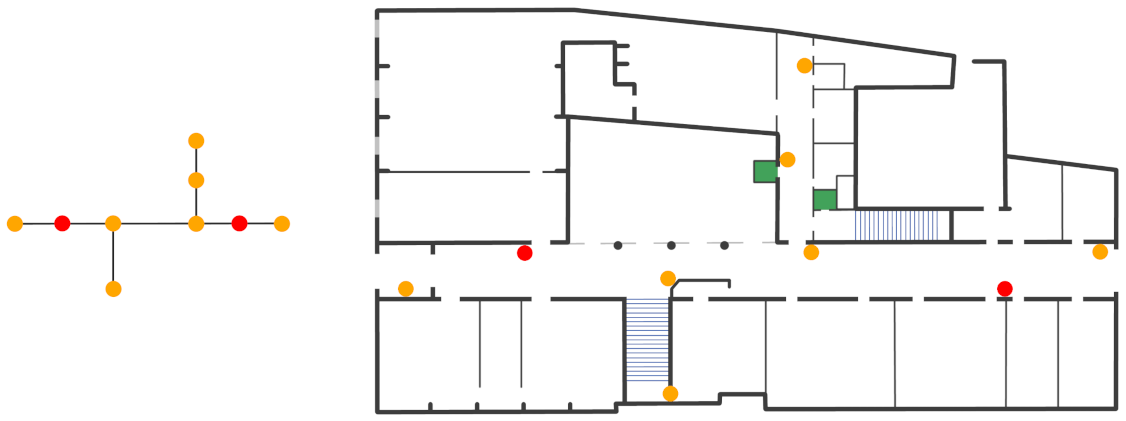
4.1. Localization Module and Beacons Deployment
4.2. Our Design Process
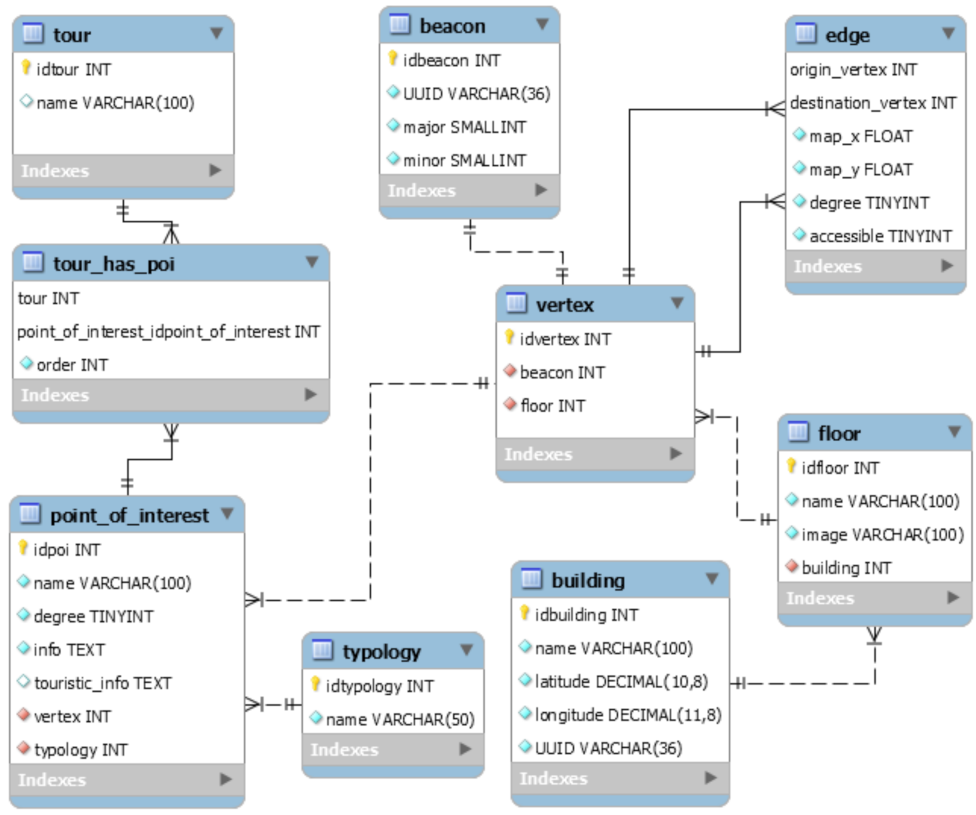
4.3. System Architecture and Data Model
4.4. Our System at a Glance
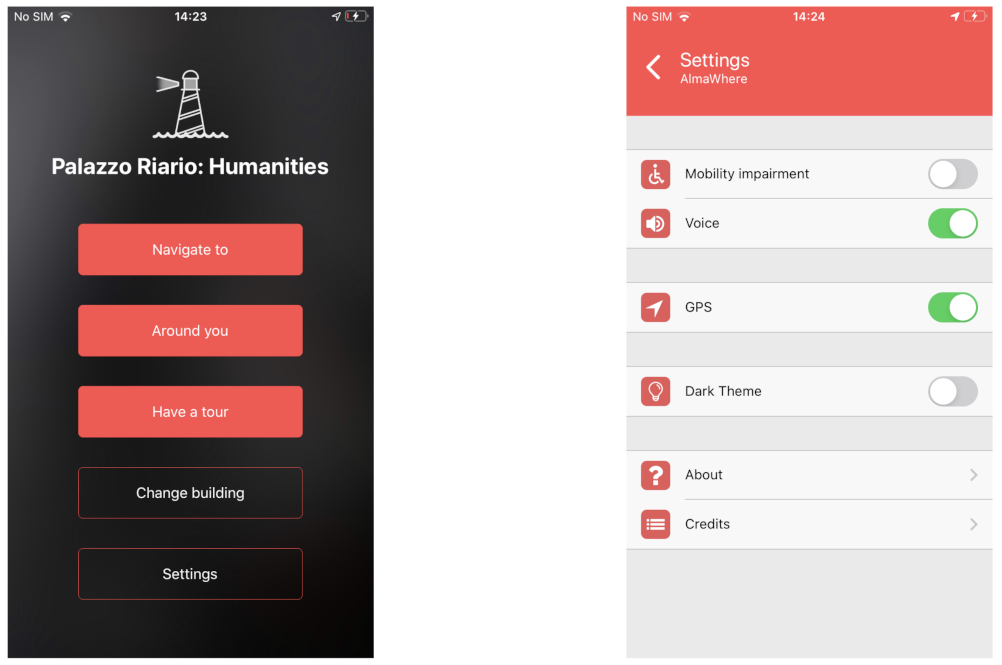
4.4.1. Home and Settings
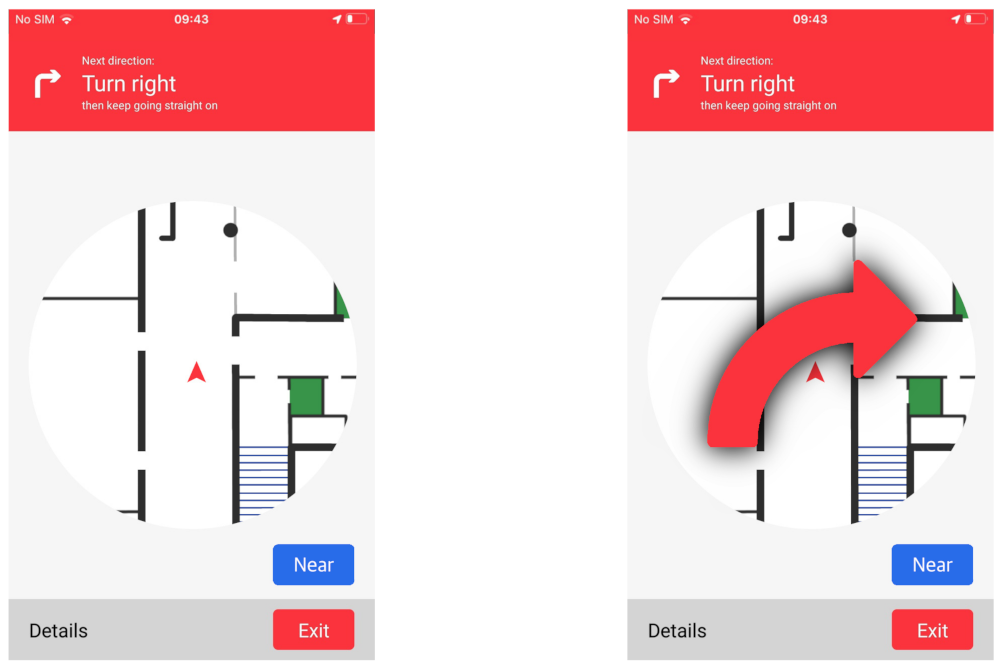
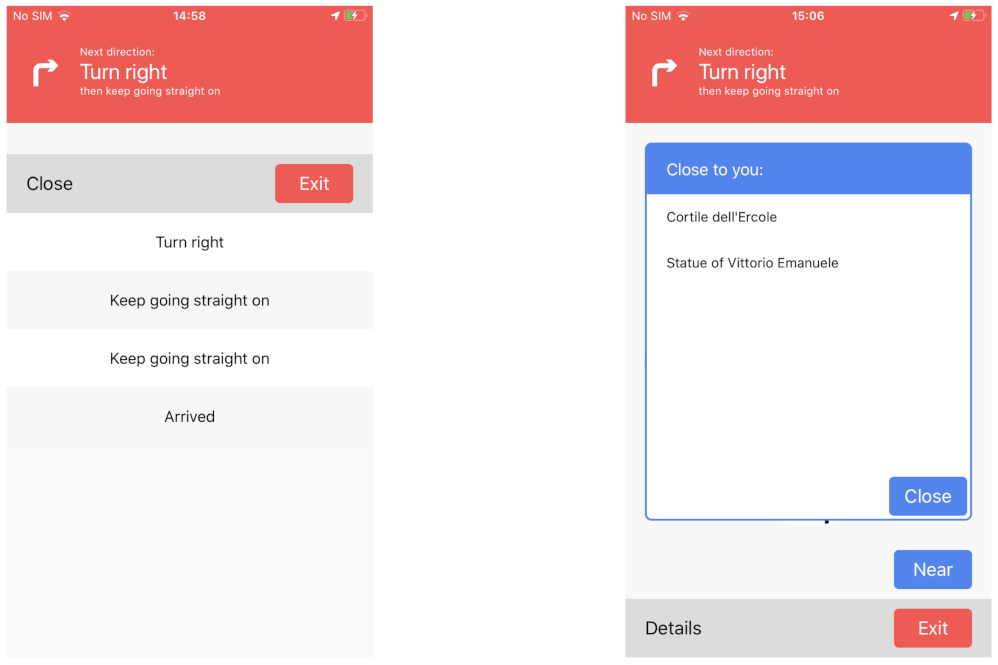
4.4.2. Navigate to
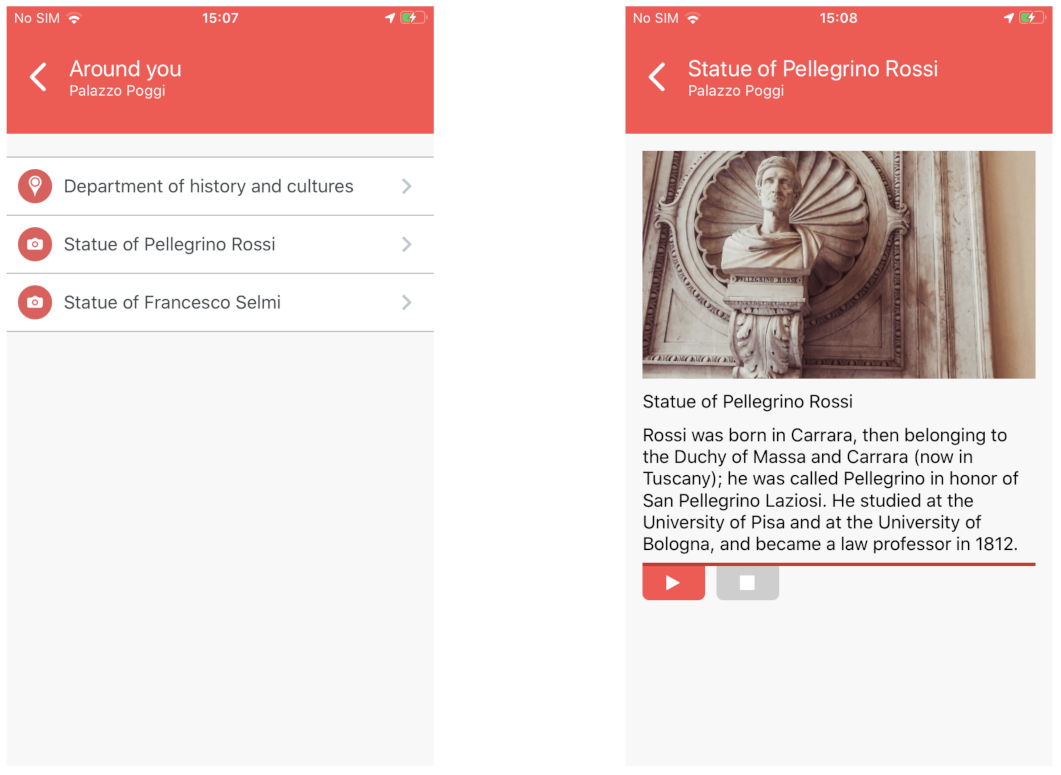
4.4.3. Around You
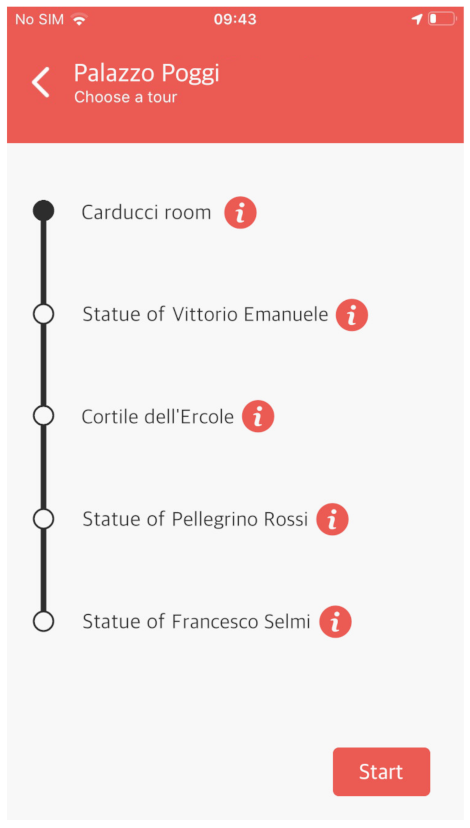
4.4.4. Have a Tour
5. Field Studies
5.1. Methodology
5.1.1. Evaluation with Students with Disabilities
5.1.2. Evaluation with Visitors and Tourists
5.1.3. Evaluation with Campus Students
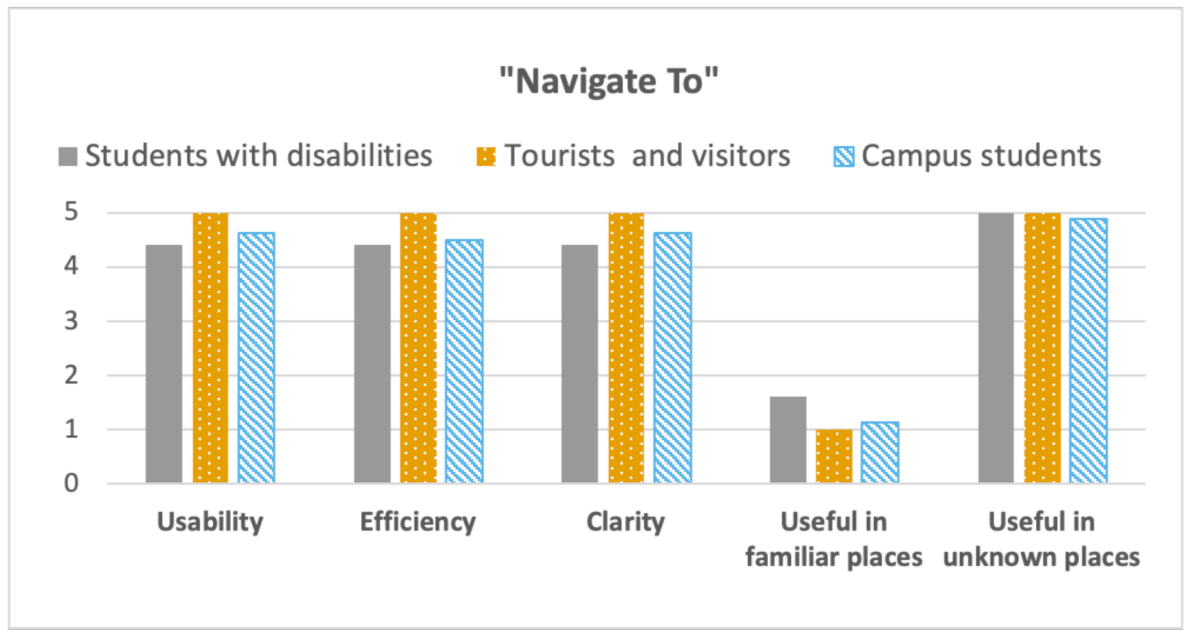
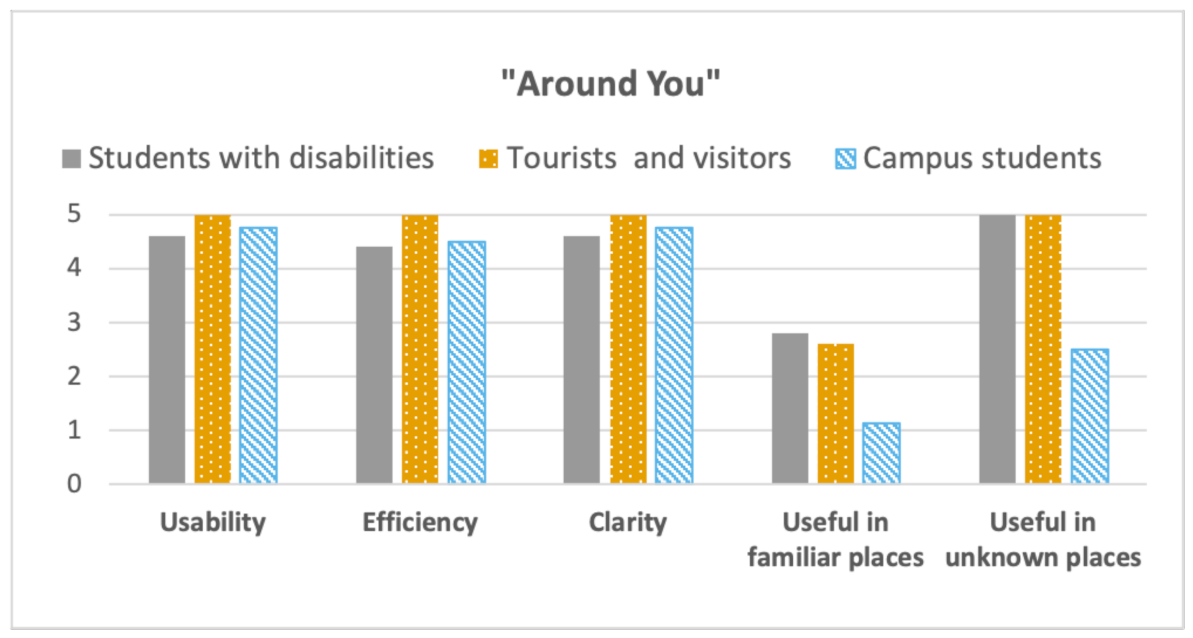
5.2. Results and Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PoI | Points of Interest |
| BLE | Bluetooth Low Energy |
| GPS | Global Positioning System |
| RSSI | Received Signal Strength Indicator |
| RFID | Radio-Frequency IDentification |
| IoT | Internet of Things |
| UUID | Universally Unique IDentifier |
| UI | User Interface |
References
- Mirri, S.; Prandi, C.; Salomoni, P. A context-aware system for personalized and accessible pedestrian paths. In Proceedings of the 2014 International Conference on High Performance Computing & Simulation (HPCS), Bologna, Italy, 21–25 July 2014; pp. 833–840. [Google Scholar]
- Bellini, G.; Cipriano, M.; Comai, S.; De Angeli, N.; Gargano, J.P.; Gianella, M.; Goi, G.; Ingrao, G.; Masciadri, A.; Rossi, G.; et al. Understanding Social Behaviour in a Health-Care Facility from Localization Data: A Case Study. Sensors 2021, 21, 2147. [Google Scholar] [PubMed]
- Kunhoth, J.; Karkar, A.; Al-Maadeed, S.; Al-Ali, A. Indoor positioning and wayfinding systems: A survey. Hum.-Centric Comput. Inf. Sci. 2020, 10, 1–41. [Google Scholar] [CrossRef]
- Kim, J.E.; Bessho, M.; Koshizuka, N.; Sakamura, K. Enhancing public transit accessibility for the visually impaired using IoT and open data infrastructures. In Proceedings of the First International Conference on IoT in Urban Space, Rome, Italy, 27–28 October 2014; pp. 80–86. [Google Scholar]
- Prandi, C.; Monti, L.; Ceccarini, C.; Salomoni, P. Smart campus: Fostering the community awareness through an intelligent environment. Mob. Netw. Appl. 2020, 25, 945–952. [Google Scholar]
- Treviranus, J. Leveraging the web as a platform for economic inclusion. Behav. Sci. Law 2014, 32, 94–103. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Tian, Y.; Yang, X.; Yi, C.; Arditi, A. Toward a computer vision-based wayfinding aid for blind persons to access unfamiliar indoor environments. Mach. Vis. Appl. 2013, 24, 521–535. [Google Scholar] [CrossRef] [Green Version]
- Lin, B.S.; Lee, C.C.; Chiang, P.Y. Simple smartphone-based guiding system for visually impaired people. Sensors 2017, 17, 1371. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Manduchi, R.; Coughlan, J. (Computer) Vision Without Sight. Commun. ACM 2012, 55, 96–104. [Google Scholar] [CrossRef]
- Tapu, R.; Mocanu, B.; Zaharia, T. A computer vision system that ensure the autonomous navigation of blind people. In Proceedings of the 2013 E-Health and Bioengineering Conference (EHB), Iasi, Romania, 21–23 November 2013. [Google Scholar]
- Kuo, Y.S.; Pannuto, P.; Hsiao, K.J.; Dutta, P. Luxapose: Indoor positioning with mobile phones and visible light. In Proceedings of the MobiCom ’14 Proceedings of the 20th Annual International Conference on Mobile Computing and Networking; Maui, HI, USA, 7–11 September 2014, pp. 447–458.
- Nakajima, M.; Haruyama, S. New indoor navigation system for visually impaired people using visible light communication. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 37. [Google Scholar] [CrossRef] [Green Version]
- Singh, V.; Aggarwal, G.; Ujwal, B. Ensemble based real-time indoor localization using stray WiFi signal. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; pp. 1–5. [Google Scholar]
- Chen, Z.; Zou, H.; Yang, J.; Jiang, H.; Xie, L. WiFi fingerprinting indoor localization using local feature-based deep LSTM. IEEE Syst. J. 2019, 14, 3001–3010. [Google Scholar] [CrossRef]
- Gallagher, T.; Wise, E.; Li, B.; Dempster, A.G.; Rizos, C.; Ramsey-Stewart, E. Indoor positioning system based on sensor fusion for the Blind and Visually Impaired. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation, Sydney, NSW, Australia, 13–15 November 2012. [Google Scholar]
- Roussos, G.; Kostakos, V. RFID in pervasive computing: State-of-the-art and outlook. Pervasive Mob. Comput. 2009, 5, 110–131. [Google Scholar] [CrossRef] [Green Version]
- Bianchi, F.; Masciadri, A.; Salice, F. ODINS: On-Demand Indoor Navigation System RFID Based. Stud. Health Technol. Inform. 2015, 217, 341–349. [Google Scholar]
- Biader Ceipidor, U.; D’Atri, E.; Medaglia, C.M.; Mei, M.; Serbanati, A.; Azzalin, G.; Rizzo, F.; Sironi, M.; Contenti, M.; D’Atri, A. A RFID System to Help Visually Impaired People in Mobility. In Proceedings of the EU RFID Forum 2007, Brussels, Belgium, 13–14 March 2007. [Google Scholar]
- Faria, J.; Lopes, S.; Fernandes, H.; Martins, P.; Barroso, J. Electronic white cane for blind people navigation assistance. In Proceedings of the 2010 World Automation Congress, Kobe, Japan, 19–23 September 2010. [Google Scholar]
- Chumkamon, S.; Tuvaphanthaphiphat, P.; Keeratiwintakorn, P. A Blind Navigation System Using RFID for Indoor Environments. In Proceedings of the 2008 5th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technolog, Krabi, Thailand, 14–17 May 2008. [Google Scholar]
- Jeon, K.E.; She, J.; Soonsawad, P.; Ng, P.C. BLE beacons for Internet of Things applications: Survey, challenges, and opportunities. IEEE Internet Things J. 2018, 5, 811–828. [Google Scholar] [CrossRef]
- Newman, N. Apple iBeacon technology briefing. J. Direct Data Digit. Mark. Pract. 2014, 15, 222–225. [Google Scholar] [CrossRef] [Green Version]
- Helms, D. Altbeacon Protocol Specification, v1.0. 2017. Available online: https://github.com/AltBeacon/spec (accessed on 28 April 2021).
- Amadeo, R. Meet Google’s ‘Eddystone’-a Flexible Open Source iBeacon Fighter. Ars Technica. 2015. Available online: https://arstechnica.com/gadgets/2015/07/meet-googles-eddystone-a-flexible-open-source-ibeacon-fighter/ (accessed on 28 April 2021).
- Oliveira, L.C.d.; Soares, A.B.; Cardoso, A.; Andrade, A.d.O.; Lamounier Júnior, E.A. Mobile Augmented Reality enhances indoor navigation for wheelchair users. Res. Biomed. Eng. 2016, 32, 111–122. [Google Scholar] [CrossRef]
- Abascal, J.; Lafuente, A.; Marco, A.; Falcó, J.M.; Casas, R.; Sevillano, J.L.; Cascado, D.; Lujan, C. An architecture for assisted navigation in intelligent environments. Int. J. Commun. Networks Distrib. Syst. 2010, 4, 49–69. [Google Scholar]
- Amaral, P.F.; García, J.C.G.; Bastos Filho, T.F.; Mazo, M. Ambient assisted route planner based on xml files with accessibility information. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 147–152. [Google Scholar]
- Pereira, C.; Sousa, A.; Filipe, V. Open-Source indoor navigation system adapted to users with motor disabilities. Procedia Comput. Sci. 2015, 67, 38–47. [Google Scholar] [CrossRef] [Green Version]
- Watanabe, C.; Minagawa, J. Event Venue Navigation for Visually Impaired People. In Proceedings of the 2019 IEEE International Conference on Big Data and Smart Computing (BigComp), Kyoto, Japan, 27 Februay–2 March 2019; pp. 1–6. [Google Scholar]
- Ahmetovic, D.; Gleason, C.; Ruan, C.; Kitani, K.; Takagi, H.; Asakawa, C. NavCog: A navigational cognitive assistant for the blind. In Proceedings of the MobileHCI ’16 18th International Conference on Human-Computer Interaction with Mobile Devices and Services, Florence, Italy, 6–9 September 2016; pp. 90–99. [Google Scholar]
- Chang, Y.J.; Wang, T.Y. Indoor wayfinding based on wireless sensor networks for individuals with multiple special needs. Cybern. Syst. Int. J. 2010, 41, 317–333. [Google Scholar] [CrossRef]
- García-Catalá, M.; Rodríguez-Sánchez, M.; Martín-Barroso, E. Survey of indoor location technologies and wayfinding systems for users with cognitive disabilities in emergencies. In Behaviour & Information Technology; Informa UK Limited: London, UK, 2020; pp. 1–25. [Google Scholar]
- Taylor, B.; Lee, D.J.; Zhang, D.; Xiong, G. Smart phone-based Indoor guidance system for the visually impaired. In Proceedings of the 2012 12th International Conference on Control Automation Robotics & Vision (ICARCV), Guangzhou, China, 5–7 December 2012; pp. 871–876. [Google Scholar]
- Al-Khalifa, S.; Al-Razgan, M. Ebsar: Indoor guidance for the visually impaired. Comput. Electr. Eng. 2016, 54, 26–39. [Google Scholar] [CrossRef]
- Yu, X.; Yang, G.; Jones, S.; Saniie, J. AR Marker Aided Obstacle Localization System for Assisting Visually Impaired. In Proceedings of the 2018 IEEE International Conference on Electro/Information Technology (EIT), Rochester, MI, USA, 3–5 May 2018; pp. 0271–0276. [Google Scholar]
- Lim, K.L.; Seng, K.P.; Yeong, L.S.; Ang, L.M. RFID and dead-reckoning-based indoor navigation for visually impaired pedestrians. In Smart Technologies: Breakthroughs in Research and Practice; IGI Global: Hershey, PA, USA, 2018; pp. 1–16. [Google Scholar]
- Perez-Jimenez, R.; Rabadan, J.; Guerra, V.; Aguiar, L.; Rufo, J. Fundamentals of Indoor VLP: Providing Autonomous Mobility for Visually Impaired People. In Proceedings of the 2017 International Conference and Workshop on Bioinspired Intelligence (IWOBI), Funchal, Portugal, 10–12 July 2017; pp. 1–6. [Google Scholar]
- Murata, M.; Ahmetovic, D.; Sato, D.; Takagi, H.; Kitani, K.M.; Asakawa, C. Smartphone-based localization for blind navigation in building-scale indoor environments. Pervasive Mob. Comput. 2019, 57, 14–32. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.E.; Bessho, M.; Kobayashi, S.; Koshizuka, N.; Sakamura, K. Navigating visually impaired travelers in a large train station using smartphone and bluetooth low energy. In Proceedings of the SAC’16 Proceedings of the 31st Annual ACM Symposium on Applied Computing; Fortaleza, Ceara, Brazil, 16–20 March 2016, pp. 604–616.
- Cheraghi, S.A.; Namboodiri, V.; Walker, L. GuideBeacon: Beacon-based indoor wayfinding for the blind, visually impaired, and disoriented. In Proceedings of the 2017 IEEE International Conference on Pervasive Computing and Communications (PerCom), Kona, HI, USA, 13–17 March 2017. [Google Scholar]
- Fogli, D.; Arenghi, A.; Gentilin, F. A universal design approach to wayfinding and navigation. In Multimedia Tools and Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 1–25. [Google Scholar]
- Clarkson, P.J.; Coleman, R.; Keates, S.; Lebbon, C. Inclusive Design: Design for the Whole Population; Springer: London, UK, 2013. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern.—Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Seco, F.; Jimenez, A.R.; Prieto, C.; Roa, J.; Koutsou, K. A survey of mathematical methods for indoor localization. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009. [Google Scholar]
- Jing, H.; Pinchin, J.; Hill, C.; Moore, T. Wi-Fi fingerprinting based on collaborative confidence level training. Pervasive Mobile Comput. 2016, 30, 32–44. [Google Scholar] [CrossRef] [Green Version]
- Beauregard, S.; Haas, H. Pedestrian Dead Reckoning: A Basis for Personal Positioning. In Proceedings of the 3rd Workshop on Positioning, Navigation and Communication, Hannover, Germany, 16 March 2006. [Google Scholar]
- Dong, Q.; Dargie, W. Evaluation of the reliability of RSSI for indoor localization. In Proceedings of the 2012 International Conference on Wireless Communications in Underground and Confined Areas, Clermont-Ferrand, France, 28–30 August 2012; pp. 1–6. [Google Scholar]
- Murata, M.; Ahmetovic, D.; Sato, D.; Takagi, H.; Kitani, K.M.; Asakawa, C. Smartphone-based indoor localization for blind navigation across building complexes. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications (PerCom), Athens, Greece, 19–23 March 2018; pp. 1–10. [Google Scholar]
- Zafari, F.; Papapanagiotou, I. Enhancing ibeacon based micro-location with particle filtering. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 1–7 December 2015; pp. 1–7. [Google Scholar]
- Chai, S.; An, R.; Du, Z. An indoor positioning algorithm using bluetooth low energy RSSI. In Proceedings of the 2016 International Conference on Advanced Materials Science and Environmental Engineering, Chiang Mai, Thailand, 26–27 June 2016. [Google Scholar]
- Lu, T.T.; Yeh, S.C.; Chen, C.Y. A study of indoor positioning systems using iBeacons with different transmission power levels. J. Chin. Inst. Eng. 2017, 40, 525–535. [Google Scholar] [CrossRef]
- Sun, W.; Liu, J.; Wu, C.; Yang, Z.; Zhang, X.; Liu, Y. MoLoc: On distinguishing fingerprint twins. In Proceedings of the 2013 IEEE 33rd International Conference on Distributed Computing Systems, Philadelphia, PA, USA, 8–11 July 2013; pp. 226–235. [Google Scholar]
- Fischer, G. Identifying and exploring design trade-offs in human-centered design. In Proceedings of the 2018 International Conference on Advanced Visual Interfaces, Castiglione della Pescaia, Italy, 29 May–1 June 2018; pp. 1–9. [Google Scholar]
- Rosson, M.B.; Carroll, J.M.; Hill, N. Usability Engineering: Scenario-Based Development of Human-Computer Interaction; Morgan Kaufmann, Elsevier: Burlington, MA, USA, 2001. [Google Scholar]
- Fogli, D.; Arenghi, A. ’Design for All’versus’ One-Size-Fits-All’: The Case of Cultural Heritage. In Proceedings of the 5th Workshop on Cultures of Participation in the Digital Age: Design Trade-offs for an Inclusive Society, Grosseto, Italy, 29 May–1 June 2018. [Google Scholar]
- Fischer, G. Exploring design trade-offs for quality of life in human-centered design. Interactions 2017, 25, 26–33. [Google Scholar] [CrossRef]
- Holmes, K. Mismatch: How Inclusion Shapes Design; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Story, M.F. Principles of universal design. In Universal Design Handbook; McGraw-Hill Professional: New York, NY, USA, 2001. [Google Scholar]
- Ayotte, D.; Vass, J.; Mitchell, J.; Treviranus, J. Personalizing interfaces using an inclusive design approach. In Proceedings of the International Conference on Universal Access in Human-Computer Interaction, Heraklion, Greece, 22–27 June 2014; pp. 191–202. [Google Scholar]
- Mitchell, J.; Treviranus, J. Inclusive Design in Ecosystems. In E-Health Two-Sided Markets; Elsevier: Amsterdam, The Netherlands, 2017; pp. 43–61. [Google Scholar]
- Newell, A. Inclusive design or assistive technology. In Inclusive Design; Springer: Berlin/Heidelberg, Germany, 2003; pp. 172–181. [Google Scholar]
- Persson, H.; Åhman, H.; Yngling, A.A.; Gulliksen, J. Universal design, inclusive design, accessible design, design for all: Different concepts—One goal? On the concept of accessibility—Historical, methodological and philosophical aspects. Univers. Access Inf. Soc. 2015, 14, 505–526. [Google Scholar] [CrossRef]
- Story, M.F. Maximizing usability: The principles of universal design. Assist. Technol. 1998, 10, 4–12. [Google Scholar] [CrossRef] [PubMed]
- Treviranus, J. The Value of Being Different. In Proceedings of the 16th Web for All 2019 Personalization-Personalizing the Web, Francisco, CA, USA, 13–14 May 2019; pp. 1–7. [Google Scholar]
- Mirri, S.; Roccetti, M.; Salomoni, P. Collaborative design of software applications: The role of users. Hum.-Centric Comput. Inf. Sci. 2018, 8, 6. [Google Scholar] [CrossRef] [Green Version]
- Ladner, R.E. Design for user empowerment. Interactions 2015, 22, 24–29. [Google Scholar] [CrossRef]
- Brewer, J. Exploring paths to a more accessible digital future. In Proceedings of the 20th International ACM SIGACCESS Conference on Computers and Accessibility, Galway, Ireland, 22–24 October 2018; pp. 1–2. [Google Scholar]
- Delnevo, G.; Monti, L.; Vignola, F.; Salomoni, P.; Mirri, S. AlmaWhere: A prototype of accessible indoor wayfinding and navigation system. In Proceedings of the 2018 15th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 January 2018; pp. 1–6. [Google Scholar]
- Faragher, R.; Harle, R. An analysis of the accuracy of bluetooth low energy for indoor positioning applications. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, Florida, USA, 8–12 September 2014; Volume 812, pp. 201–210. [Google Scholar]
- Mirri, S.; Prandi, C.; Salomoni, P.; Callegati, F.; Melis, A.; Prandini, M. A service-oriented approach to crowdsensing for accessible smart mobility scenarios. Mob. Inf. Syst. 2016, 2016, 2821680. [Google Scholar] [CrossRef] [Green Version]
- Mirri, S.; Prandi, C.; Salomoni, P. Personalizing Pedestrian Accessible way-finding with mPASS. In Proceedings of the 2016 13th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2016; pp. 1119–1124. [Google Scholar]
- Delnevo, G.; Mambelli, G.; Rubano, V.; Prandi, C.; Mirri, S. Almawhere 2.0: A pervasive system to facilitate indoor wayfinding. In Proceedings of the 2020 17th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Description | Number of Users | Target |
|---|---|---|---|
| Palazzo Riario | The headquarters of the Department of History and Cultures, Bologna. It includes the Tecnolab, a technological laboratory equipped with different assistive technologies, created to welcome students with disabilities. | 5 | Students with disabilities |
| Palazzo Poggi | Built in 1549, it is the headquarters of the University of Bologna and of the rector of the university. It also includes a museum, a library, some classrooms, and several administrative offices. | 5 | Visitors and Tourists |
| Cesena Campus | It is one of the new Multicampus structures of the University of Bologna build in the city of Cesena. The new campus building hosts different degree courses and department facilities. | 8 | Students |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prandi, C.; Delnevo, G.; Salomoni, P.; Mirri, S. On Supporting University Communities in Indoor Wayfinding: An Inclusive Design Approach. Sensors 2021, 21, 3134. https://doi.org/10.3390/s21093134
Prandi C, Delnevo G, Salomoni P, Mirri S. On Supporting University Communities in Indoor Wayfinding: An Inclusive Design Approach. Sensors. 2021; 21(9):3134. https://doi.org/10.3390/s21093134
Chicago/Turabian StylePrandi, Catia, Giovanni Delnevo, Paola Salomoni, and Silvia Mirri. 2021. "On Supporting University Communities in Indoor Wayfinding: An Inclusive Design Approach" Sensors 21, no. 9: 3134. https://doi.org/10.3390/s21093134