
High-Efficiency Multi-Sensor System for Chair Usage Detection


Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
3.1. Requirements Specifications
- Functionality:The system should have the ability to detect a sitting person with a very low rate of false-positive cases (e.g., a bag that is placed on the seat should generate no alert).
- Modularity:Due to the presence of multiple chairs in a house, the detecting device should be modular and a single storing/transmitting unit per home should be used.
- Connectivity:Chairs are highly volatile objects in the house; the presence of cables to transmit data would render chairs dysfunctional, unpleasant to look at and may even enhance the risk of fall.
- Power management:As in the previous point, the use of power cables is not recommended; the use of batteries is required. However, for the system to be effective in fall detection, it must always be active and maintenance operations such as battery charging should be minimized. A battery life of more than one year is considered acceptable.
- Non intrusiveness:The system should not interfere with the daily habits of the person. In particular, it should not require a substantial modification to the commodities.
- Non-disruptiveness:The system should not require a radical change in the routine of the user (for instance, a wearable device).
3.2. Sensor Analysis
- Visible light sensing may be installed under the seat or on the backrest in order to detect the shadow of a person that is sitting down. However, this solution could be affected by the overall light condition of the room or the presence of non-human objects blocking the light impinging on the sensor. Moreover, the energy consumption of this type of device strongly relies on the amount of light detected.
- Infrared light sensing has similar issues to the light-sensing described above, especially referring to passive infrared detectors. Another choice could be the usage of a proximity detector in combination with an IR LED, these sensors offer great accuracy in detecting whether an object is approaching the chair but are not able to distinguish human beings from objects. Moreover, the IR LED increases significantly the energy consumption of these devices and they may infringe the sense of privacy of the user.
- Sound detectors could be both microphones or ultrasonic detectors. In the first case, one could decide to detect humans sitting by the sound generated. As in the visible light sensors, this type of detection is really affected by environmental noise and requires a specific circuit in order to obtain the correct amplification of the signal. Ultrasonic detectors behave in the same way as IR proximity sensors so they inherit the same issues regarding high energy consumption and the impossibility to unequivocally detect whether the measurement involves a human being or not.
- Weight sensors installed under the legs of the chair, could very precisely detect the sitting of a person and could possibly distinguish input given by bags that are much less heavy than a human being with an optimal calibration. The main drawback is the modification to the chair could be disliked by the user, and the high degradation under its legs caused by the usage will destroy the sensor in a very short amount of time.
- Accelerometers could be potentially installed nearly everywhere on the chair and will detect the sitting behaviour of the user measuring the natural vibration induced by the presence of a person on a chair with an appropriate resolution. Object detection can be avoided noting that they do not produce any vibration while resting on a chair. Energy consumption can be very low and it is generally possible to enable a trigger in order to run the system mainly in sleep mode.
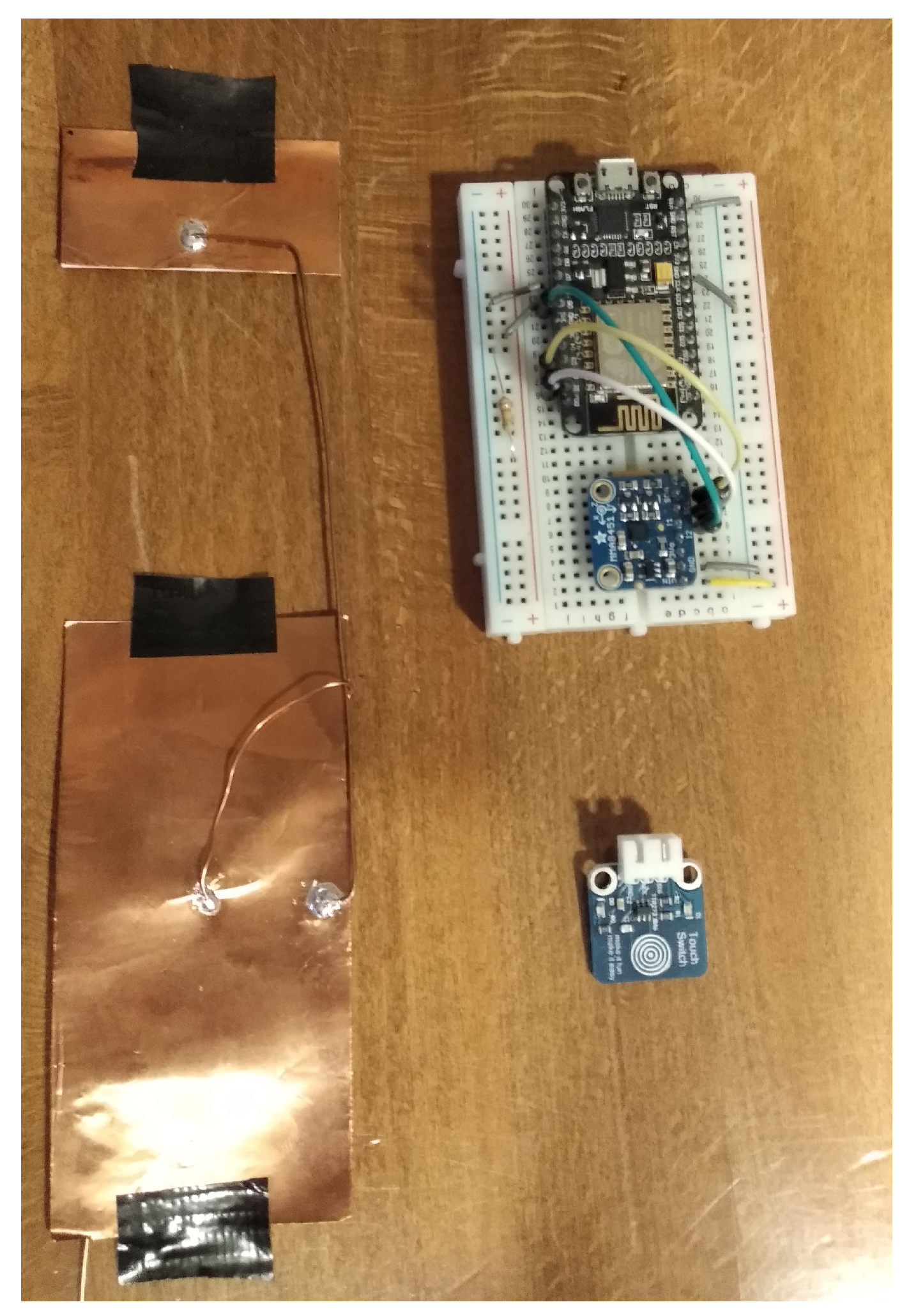
- Capacitive sensing exploits the change in charge density induced by the presence of a person near the sensor, which could be placed under the seat or in the backrest. False-positive cases could arise with objects with high quantities of water, caused to their similarity with a human body in terms of dielectric properties. Detection can be achieved by microcontrollers or specific low energy chips capable of generating interrupt signals.
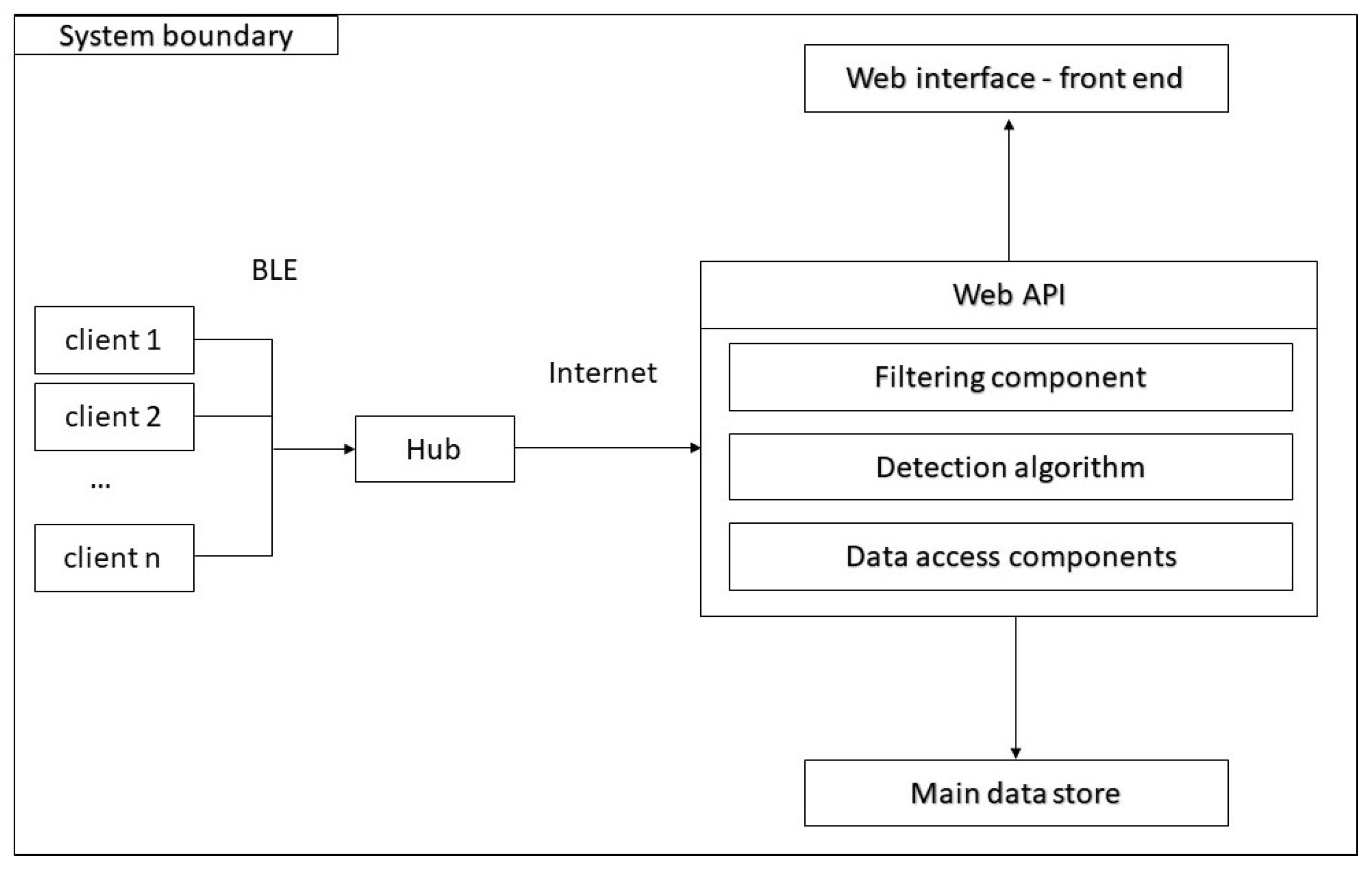
3.3. General Architecture and Power Save Features
3.4. Power Consumption Considerations
3.5. Algorithm and Calibration
4. Results and Discussion
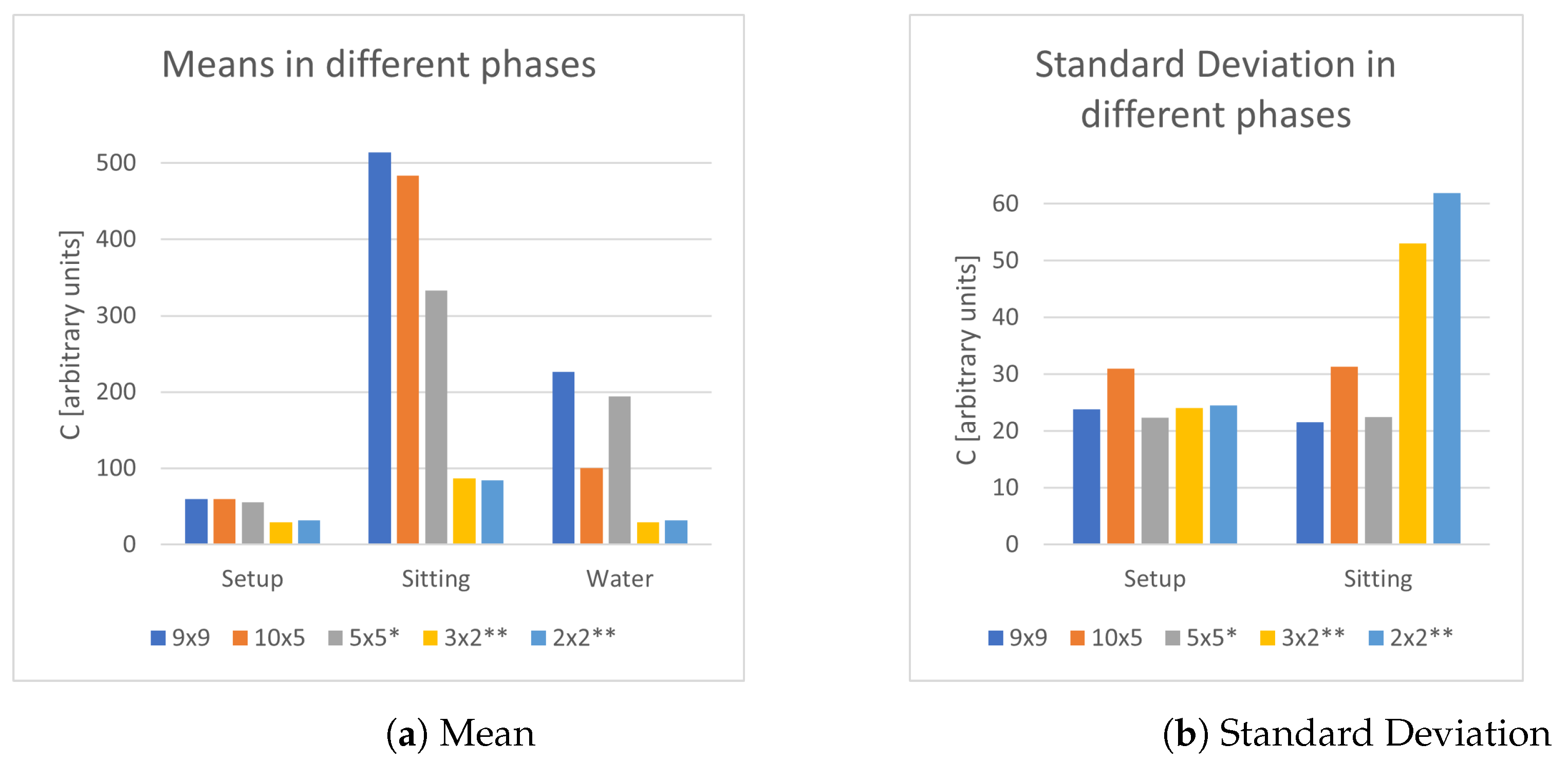
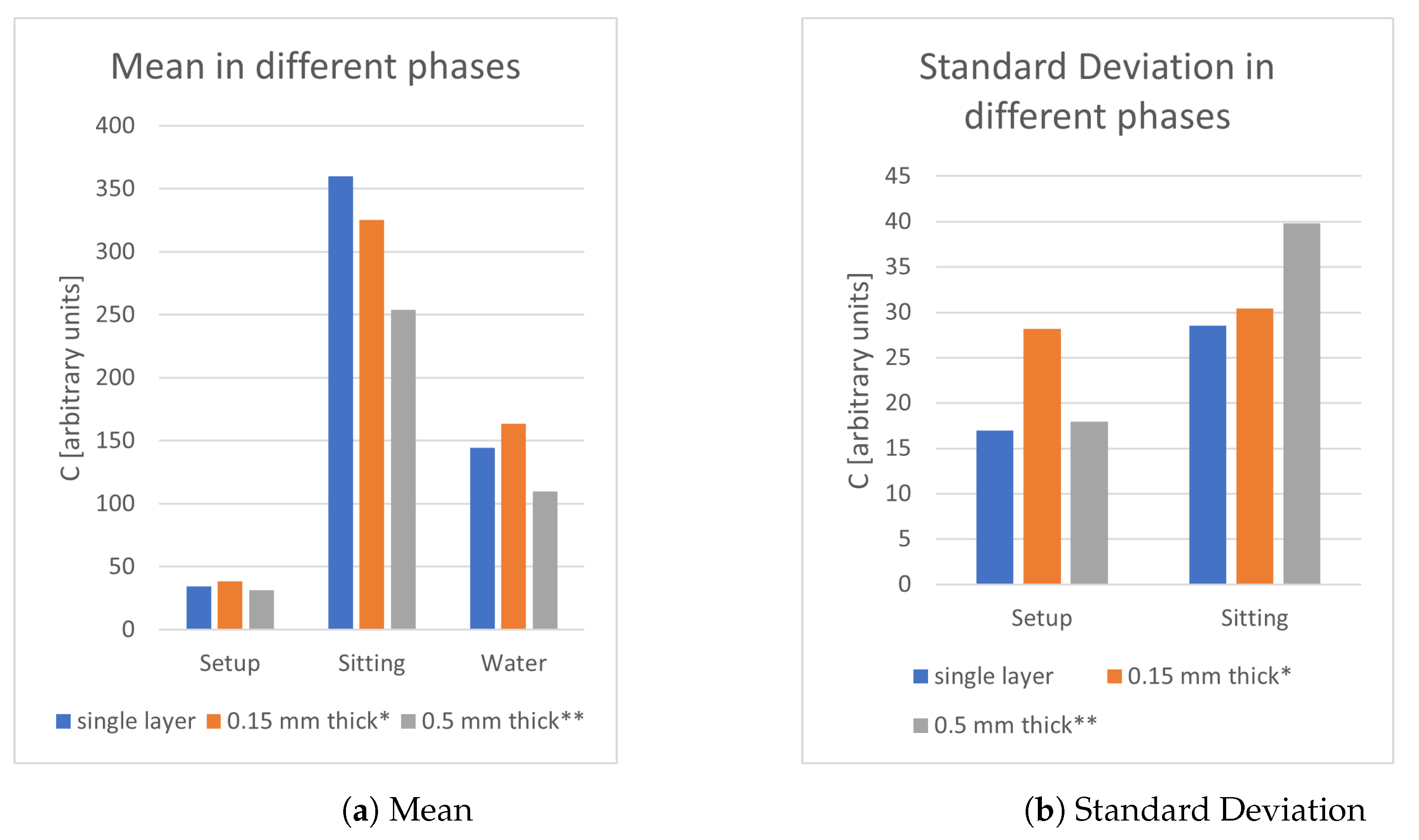
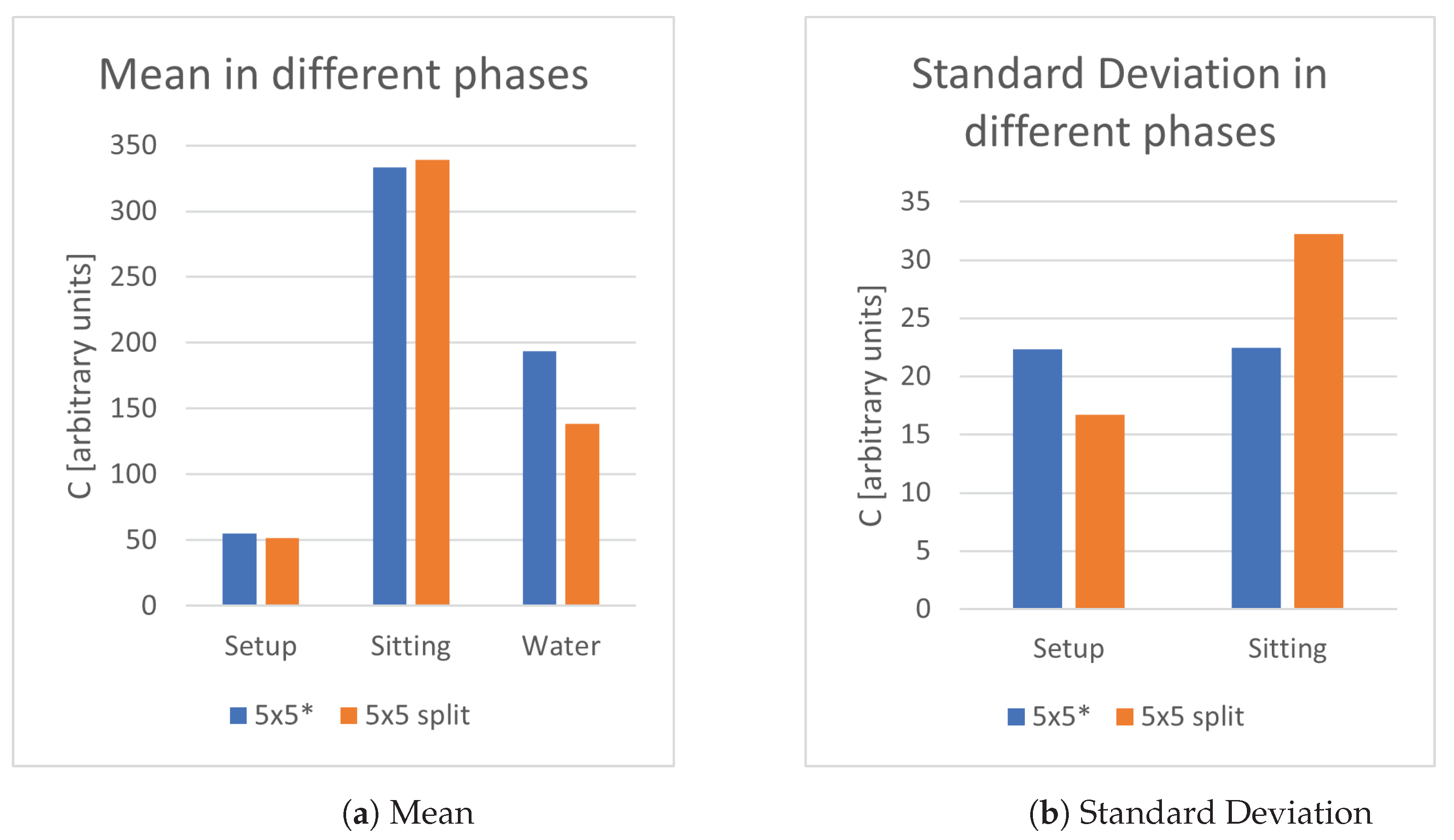
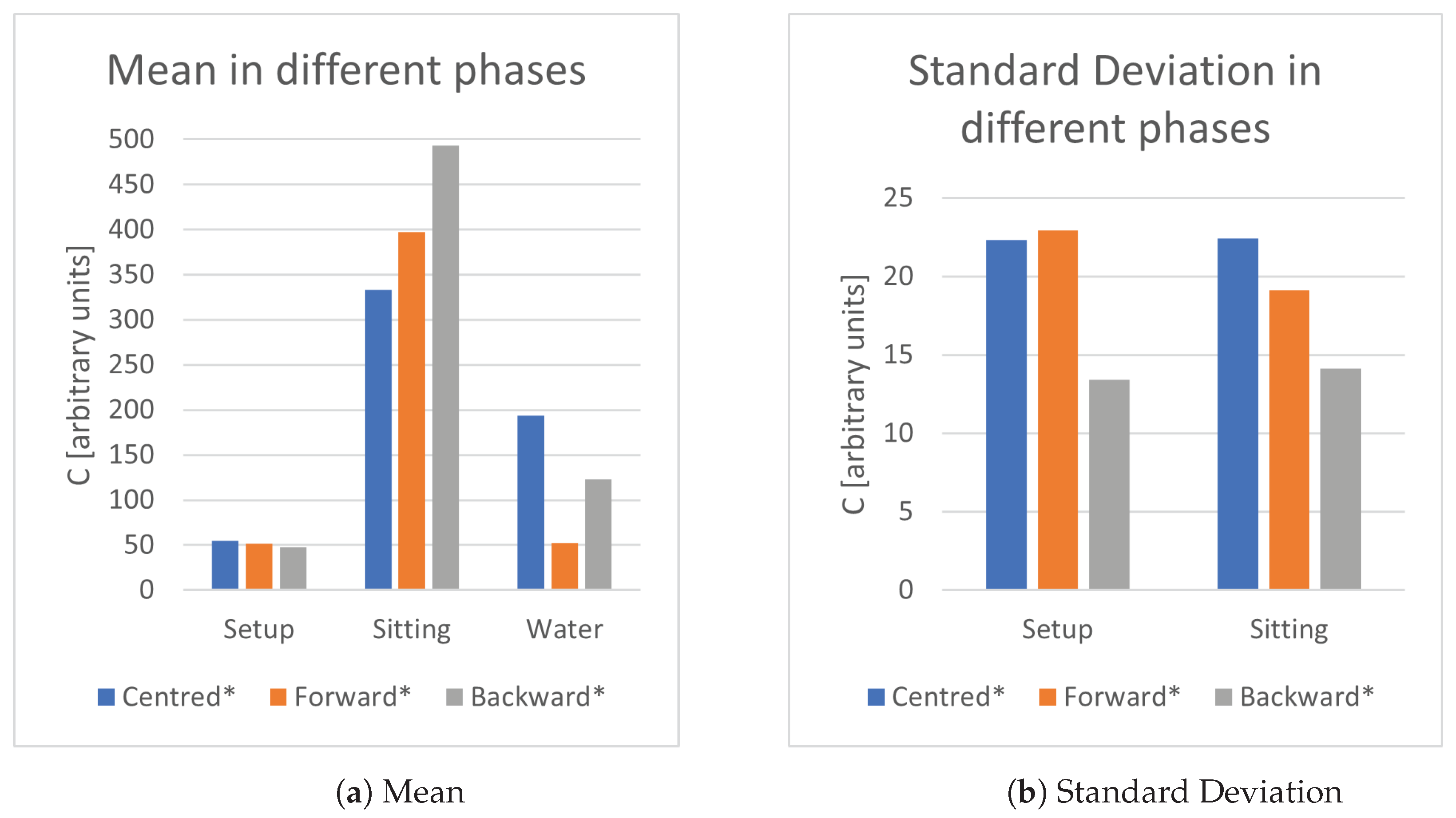
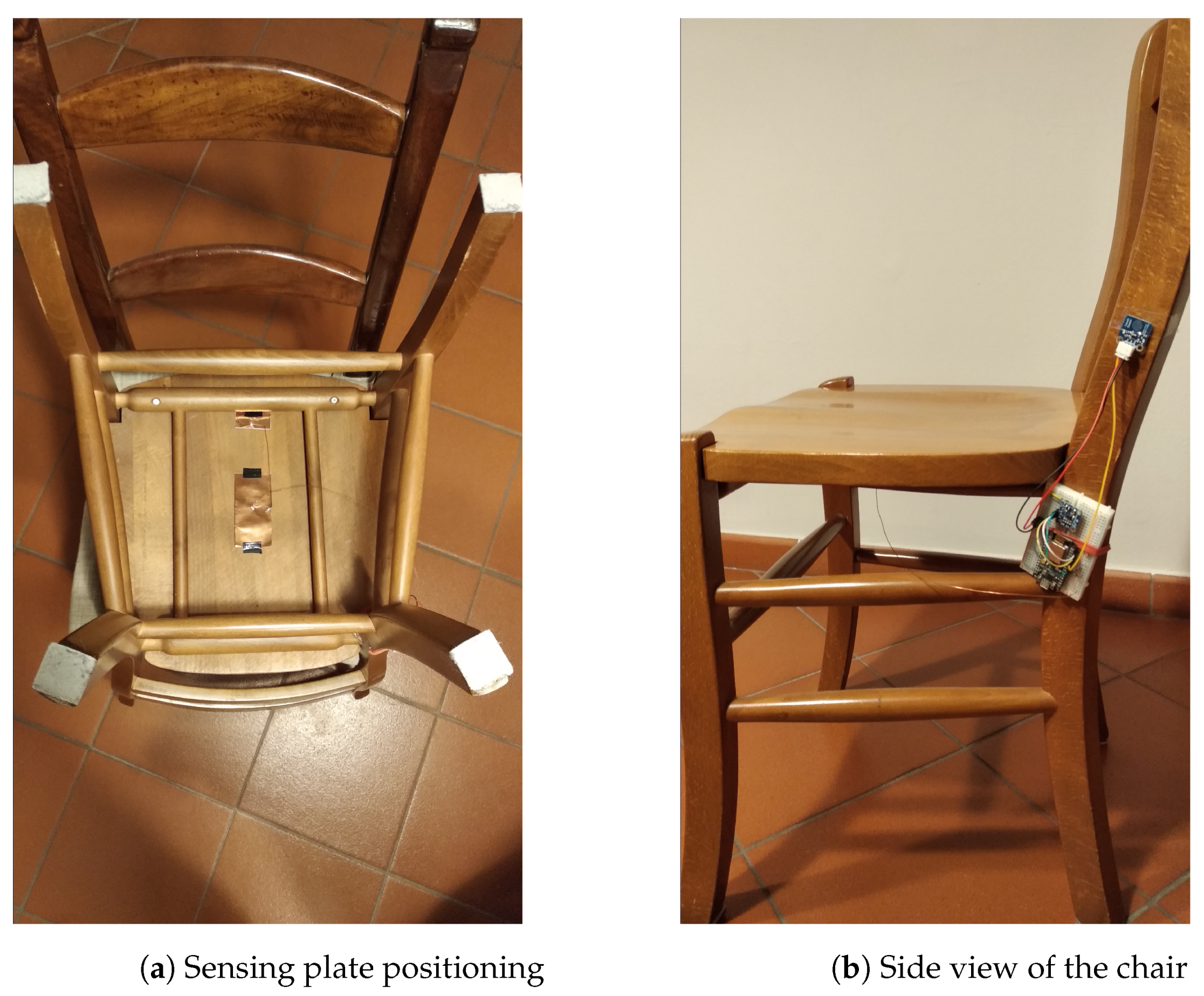
4.1. Sensing Plate Geometry
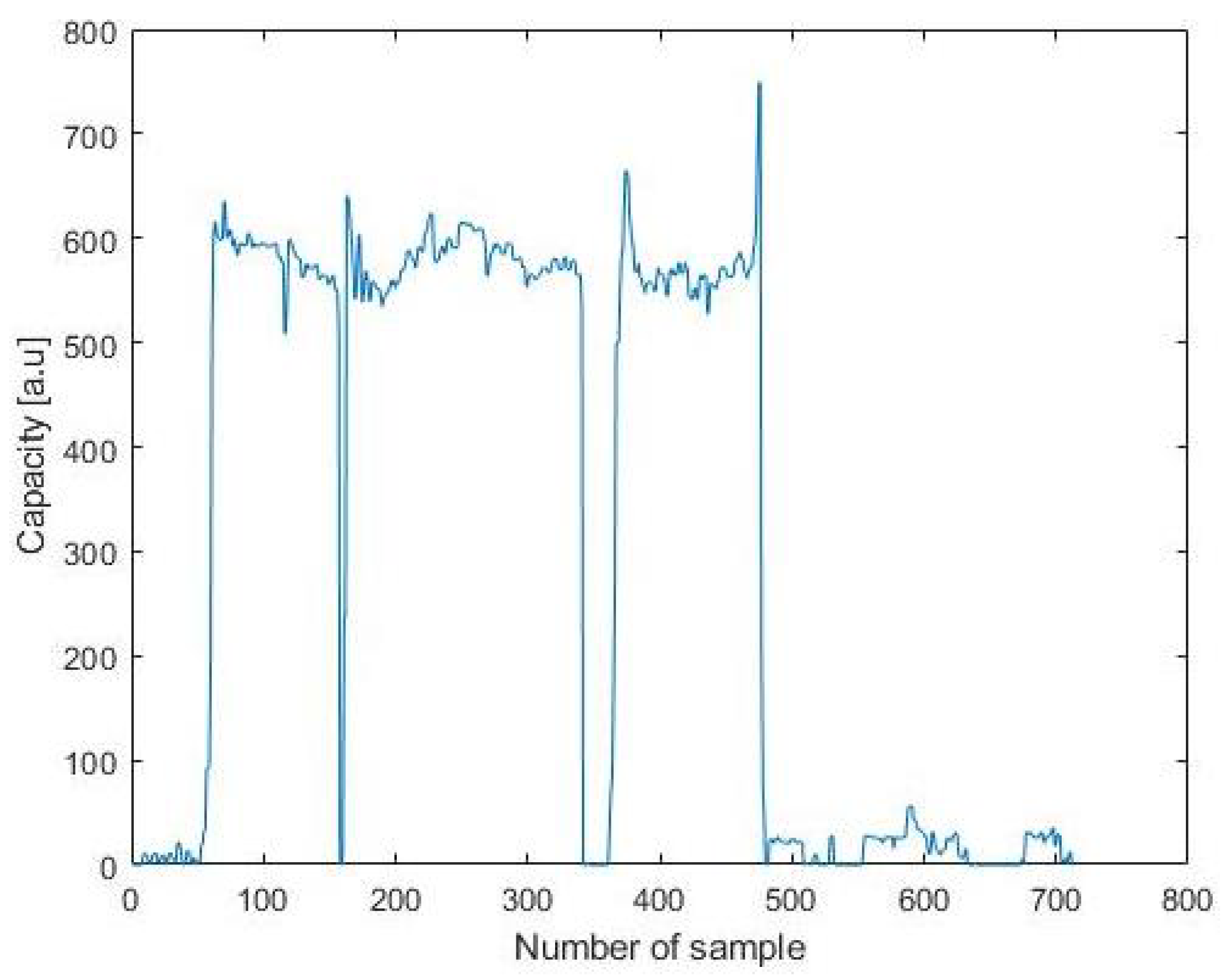
4.2. Real Life Usage Performance
4.3. Power Consumption Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Department of Economic and Social Affairs, United Nations. World Population Ageing 2017; Technical Report; United Nations: San Francisco, CA, USA, 2017. [Google Scholar]
- Kinsella, K.; He, W. An Aging World: 2008. US Census Bureau. International Population Reports (P95/09-1); US Gov Printing Office: Washington, DC, USA, 2009.
- World Health Organization. World Health Day 2012—Ageing and Health—Toolkit for Event Organizers; WHO: Geneva, Switzerland, 2012; Available online: https://apps.who.int/iris/handle/10665/70840 (accessed on 7 November 2021).
- Benetazzo, F.; Ferracuti, F.; Freddi, A.; Giantomassi, A.; Iarlori, S.; Longhi, S.; Monteriù, A.; Ortenzi, D. AAL technologies for independent life of elderly people. In Ambient Assisted Living; Springer: Basel, Switzerland, 2015; pp. 329–343. [Google Scholar]
- Masciadri, A.; Comai, S.; Salice, F. Wellness assessment of Alzheimer’s patients in an instrumented health-care facility. Sensors 2019, 19, 3658. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Combi, C.; Pozzi, G. Clinical Information Systems and Artificial Intelligence: Recent Research Trends. Yearb. Med. Inform. 2019, 28, 83–94. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Intille, S.S.; Larson, K.; Kukla, C. Just-In-Time Context-Sensitive Questioning for Preventative Health Care. In Proceedings of the AAAI 2002 Workshop on Automation as Caregiver: The Role of Intelligent Technology in Elder Care, Edmonton, AB, Canada, 29 July 2002. [Google Scholar]
- Veronese, F.; Masciadri, A.; Comai, S.; Matteucci, M.; Salice, F. Behavior drift detection based on anomalies identification in home living quantitative indicators. Technologies 2018, 6, 16. [Google Scholar] [CrossRef] [Green Version]
- Mangano, S.; Saidinejad, H.; Veronese, F.; Comai, S.; Matteucci, M.; Salice, F. Bridge: Mutual Reassurance for Autonomous and Independent Living. IEEE Intell. Syst. 2015, 30, 31–38. [Google Scholar] [CrossRef]
- Maswadi, K.; Ghani, N.B.A.; Hamid, S.B. Systematic Literature Review of Smart Home Monitoring Technologies Based on IoT for the Elderly. IEEE Access 2020, 8, 92244–92261. [Google Scholar] [CrossRef]
- Tse, R.; Monti, L.; Im, M.; Mirri, S.; Pau, G.; Salomoni, P. DeepClass: Edge based class occupancy detection aided by deep learning and image cropping. In Proceedings of the SPIE 11519, Twelfth International Conference on Digital Image Processing (ICDIP 2020), Osaka, Japan, 12 June 2020; Volume 11519. [Google Scholar] [CrossRef]
- Sokullu, R.; Akkaş, M.A.; Demir, E. IoT supported smart home for the elderly. Internet Things 2020, 11, 100239. [Google Scholar] [CrossRef]
- Heron, M. Deaths: Leading causes for 2007. Nat. Vital Stat. Rep. 2011, 59, 1–95. [Google Scholar]
- Fleming, J.; Brayne, C. Inability to get up after falling, subsequent time on floor, and summoning help: Prospective cohort study in people over 90. BMJ 2008, 337, a2227. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ren, L.; Peng, Y. Research of Fall Detection and Fall Prevention Technologies: A Systematic Review. IEEE Access 2019, 7, 77702–77722. [Google Scholar] [CrossRef]
- Wang, X.; Ellul, J.; Azzopardi, G. Elderly Fall Detection Systems: A Literature Survey. Front. Robot. AI 2020, 7, 71. [Google Scholar] [CrossRef] [PubMed]
- Sharma, N.; Brinke, J.K.; Van Gemert-Pijnen, J.E.W.C.; Braakman-Jansen, L.M.A. Implementation of Unobtrusive Sensing Systems for Older Adult Care: Scoping Review. JMIR Aging 2021, 4, e27862. [Google Scholar] [CrossRef] [PubMed]
- Mu, L.; Li, K.; Wu, C. A sitting posture surveillance system based on image processing technology. In Proceedings of the 2010 2nd International Conference on Computer Engineering and Technology (ICCET), Chengdu, China, 16–18 April 2010; pp. V1-692–V1-695. [Google Scholar]
- Song-Lin, W.; Rong-Yi, C. Human behavior recognition based on sitting postures. In Proceedings of the 2010 International Symposium on Computer Communication Control and Automation (3CA), Bologna, Italy, 28–30 November 2010; pp. 138–141. [Google Scholar]
- Mekruksavanich, S.; Hnoohom, N.; Jitpattanakul, A. Smartwatch-based sitting detection with human activity recognition for office workers syndrome. In Proceedings of the 2018 International ECTI Northern Section Conference on Electrical, Electronics, Computer and Telecommunications Engineering (ECTI-NCON), Chiang Rai, Thailand, 25–28 February 2018; pp. 160–164. [Google Scholar] [CrossRef]
- Fuller, D.; Anaraki, J.R.; Simango, B.; Rayner, M.; Dorani, F.; Bozorgi, A.; Luan, H.; Basset, F.A. Predicting lying, sitting, walking and running using Apple Watch and Fitbit data. BMJ Open Sport Exerc. Med. 2021, 7, e001004. [Google Scholar] [CrossRef] [PubMed]
- Nyan, M.; Tay, F.; Manimaran, M.; Seah, K. Garment-based detection of falls and activities of daily living using 3-axis MEMS accelerometer. J. Phys. Conf. Ser. 2006, 34, 175. [Google Scholar] [CrossRef]
- Sazonov, E.S.; Fulk, G.; Hill, J.; Schutz, Y.; Browning, R. Monitoring of Posture Allocations and Activities by a Shoe-Based Wearable Sensor. IEEE Trans. Biomed. Eng. 2011, 58, 983–990. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Ouyang, X. Sitting posture detection and recognition using force sensor. In Proceedings of the 2012 5th International Conference on BioMedical Engineering and Informatics, Chongqing, China, 16–18 October 2012; pp. 1117–1121. [Google Scholar] [CrossRef]
- Zhu, M.; Martinez, A.M.; Tan, H.Z. Template-based Recognition of Static Sitting Postures. In Proceedings of the 2003 Conference on Computer Vision and Pattern Recognition Workshop, Madison, WI, USA, 16–22 June 2003; p. 50. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Li, W.; Gravina, R.; Cao, J.; Li, Q.; Fortino, G. Activity Level Assessment Using a Smart Cushion for People with a Sedentary Lifestyle. Sensors 2017, 17, 2269. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rosato, D.; Masciadri, A.; Comai, S.; Salice, F. Non-invasive monitoring system to detect sitting people. In Proceedings of the 4th EAI International Conference on Smart Objects and Technologies for Social Good, Bologna, Italy, 28–30 November 2018. [Google Scholar]
- CapacitiveSensor. Available online: https://github.com/PaulStoffregen/CapacitiveSensor (accessed on 7 November 2021).
- Masciadri, A.; Trofimova, A.A.; Matteucci, M.; Salice, F. Human Behavior Drift Detection in a Smart Home Environment. Stud. Health Technol. Inform. 2017, 242, 199–203. [Google Scholar] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Sensed Variable | Power Cons. | Intrusiveness | Reliab. | Price |
|---|---|---|---|---|---|
| PIN | Vis. light | medium | high | low | high |
| Ultrasound | Sound | high | medium | medium | medium |
| PIR | Inf. light | high | medium | medium | medium |
| Microphones | Sound | medium | low | low | low |
| Load cells | Weight | medium | medium | medium | high |
| Accelerometer | Acceleration | low | low | medium | low |
| Capacitive | Capacity | medium | low | high | low |
| MPR121 | CAP1203 | MMA8451 | MPU6050 | |
|---|---|---|---|---|
| Normal Consumption | 29 µA | 500 µA | 165 µA | 500 µA |
| Power saving Cons. | 3 µA | 50 µA | 6 µA | 5 µA |
| Actual | Status | ||
|---|---|---|---|
| P | N | ||
| Predicted | P | 101 | 5 |
| status | N | 0 | 122 |
| Actual | Status | ||
|---|---|---|---|
| P | N | ||
| Predicted | P | 38 | 2 |
| status | N | 0 | 101 |
| Function | Days | Gain [%] |
|---|---|---|
| Linear system = 1.1 | 110.7 | 0 |
| Linear system = 2 | 127.3 | 15 |
| Linear system = 3 | 129.2 | 16.7 |
| Linear system x(0) = 1000 | 119.1 | 7.6 |
| Quadratic | 123.9 | 11.9 |
| Linear | 103.4 | −6.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baserga, A.; Grandi, F.; Masciadri, A.; Comai, S.; Salice, F. High-Efficiency Multi-Sensor System for Chair Usage Detection. Sensors 2021, 21, 7580. https://doi.org/10.3390/s21227580
Baserga A, Grandi F, Masciadri A, Comai S, Salice F. High-Efficiency Multi-Sensor System for Chair Usage Detection. Sensors. 2021; 21(22):7580. https://doi.org/10.3390/s21227580
Chicago/Turabian StyleBaserga, Alessandro, Federico Grandi, Andrea Masciadri, Sara Comai, and Fabio Salice. 2021. "High-Efficiency Multi-Sensor System for Chair Usage Detection" Sensors 21, no. 22: 7580. https://doi.org/10.3390/s21227580