
A Robust Road Vanishing Point Detection Adapted to the Real-world Driving Scenes


Abstract
:1. Introduction
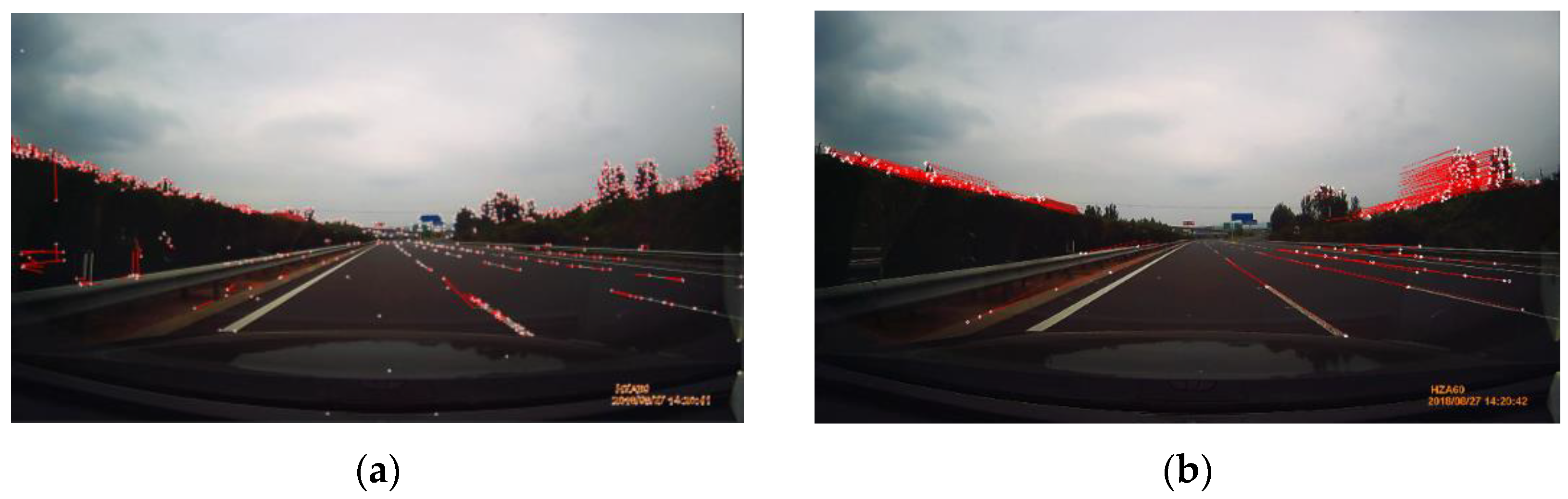
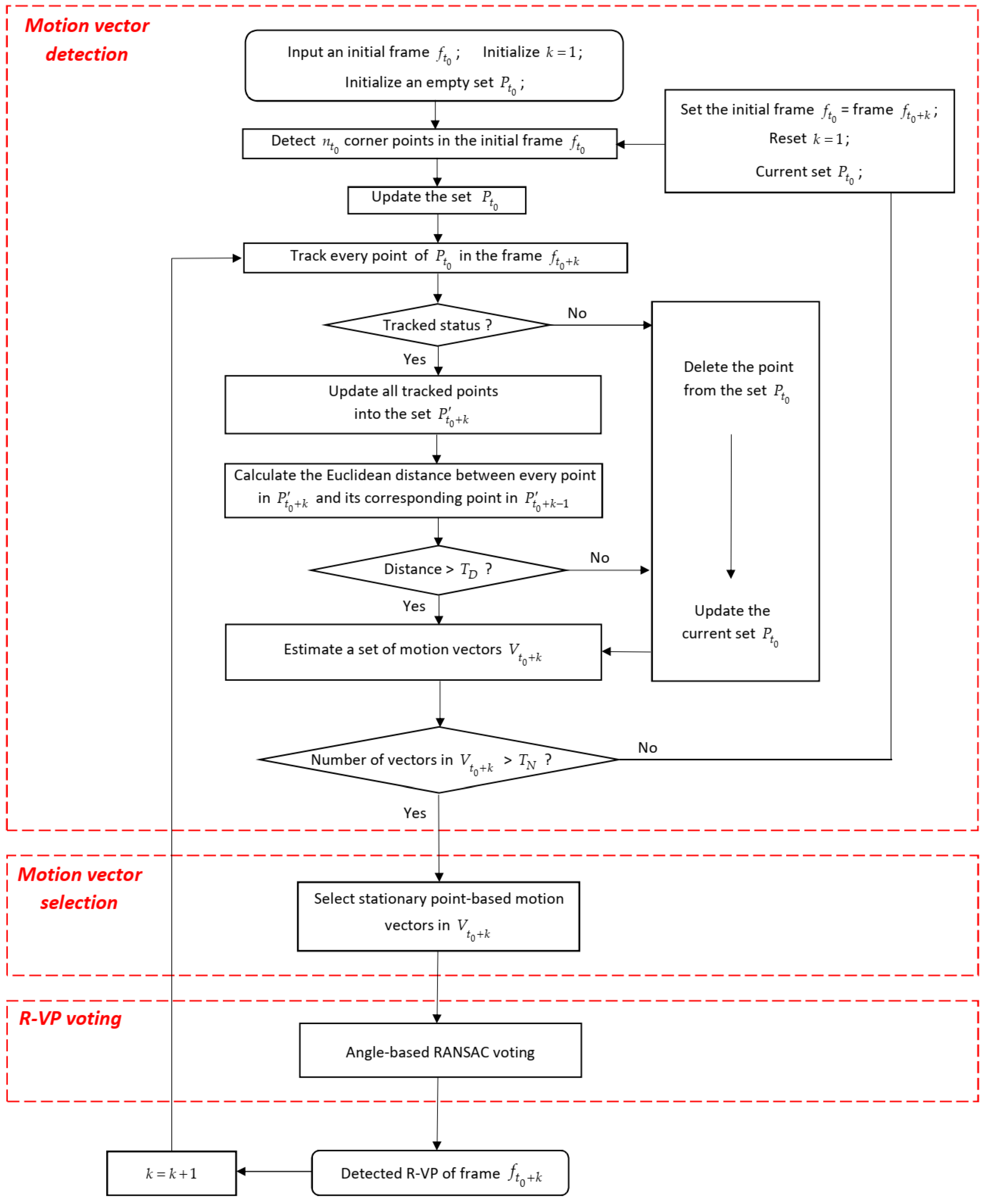
- Stable motion vector detection is proposed to detect the stable vectors from several consecutive frames.
- Stationary point-based motion vector selection is proposed to keep useful motion vectors and to reduce unhelpful ones for the R-VP detection.
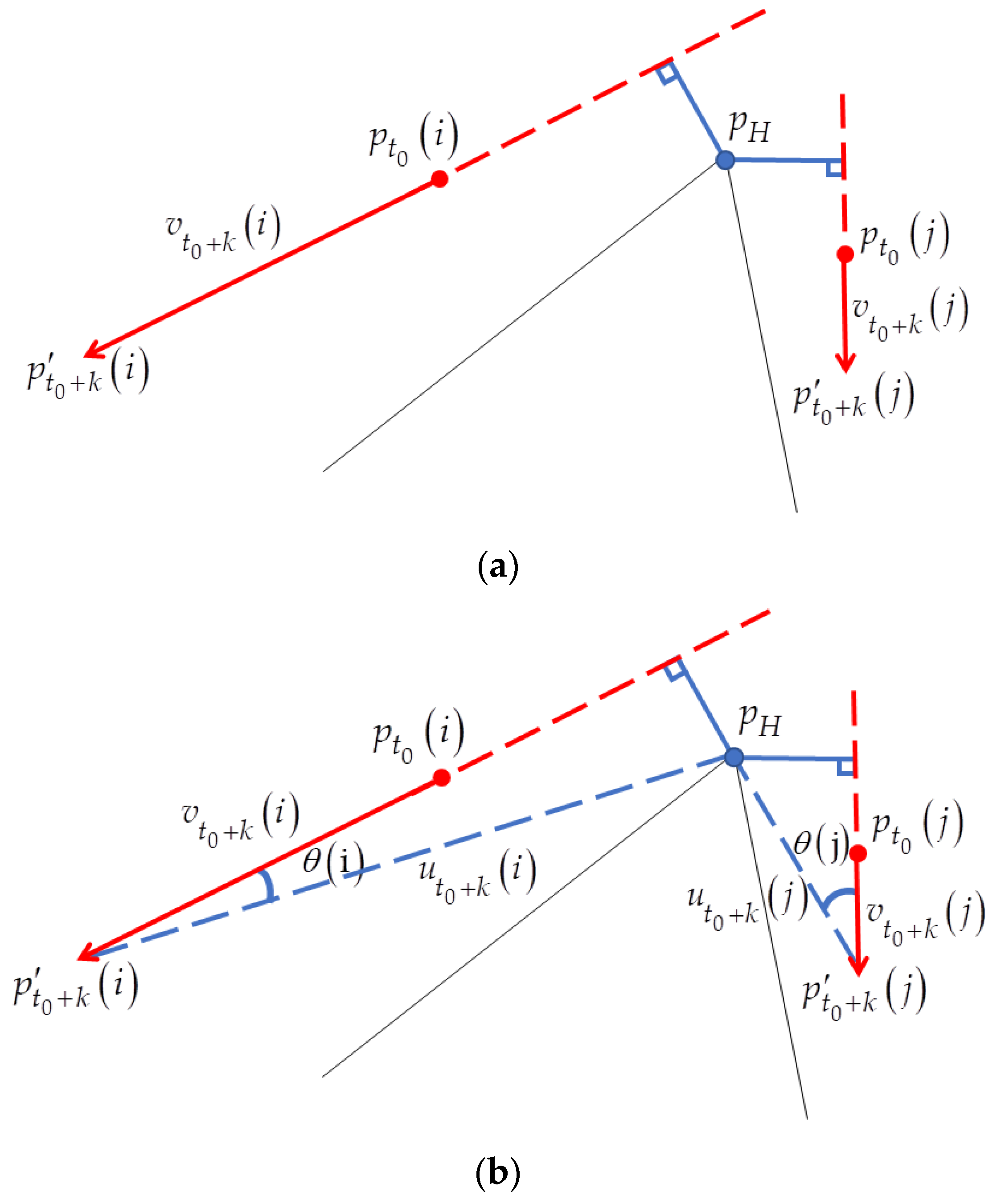
- Angle-based RANSAC voting is proposed to reduce efficiently the contributions of the outliers.
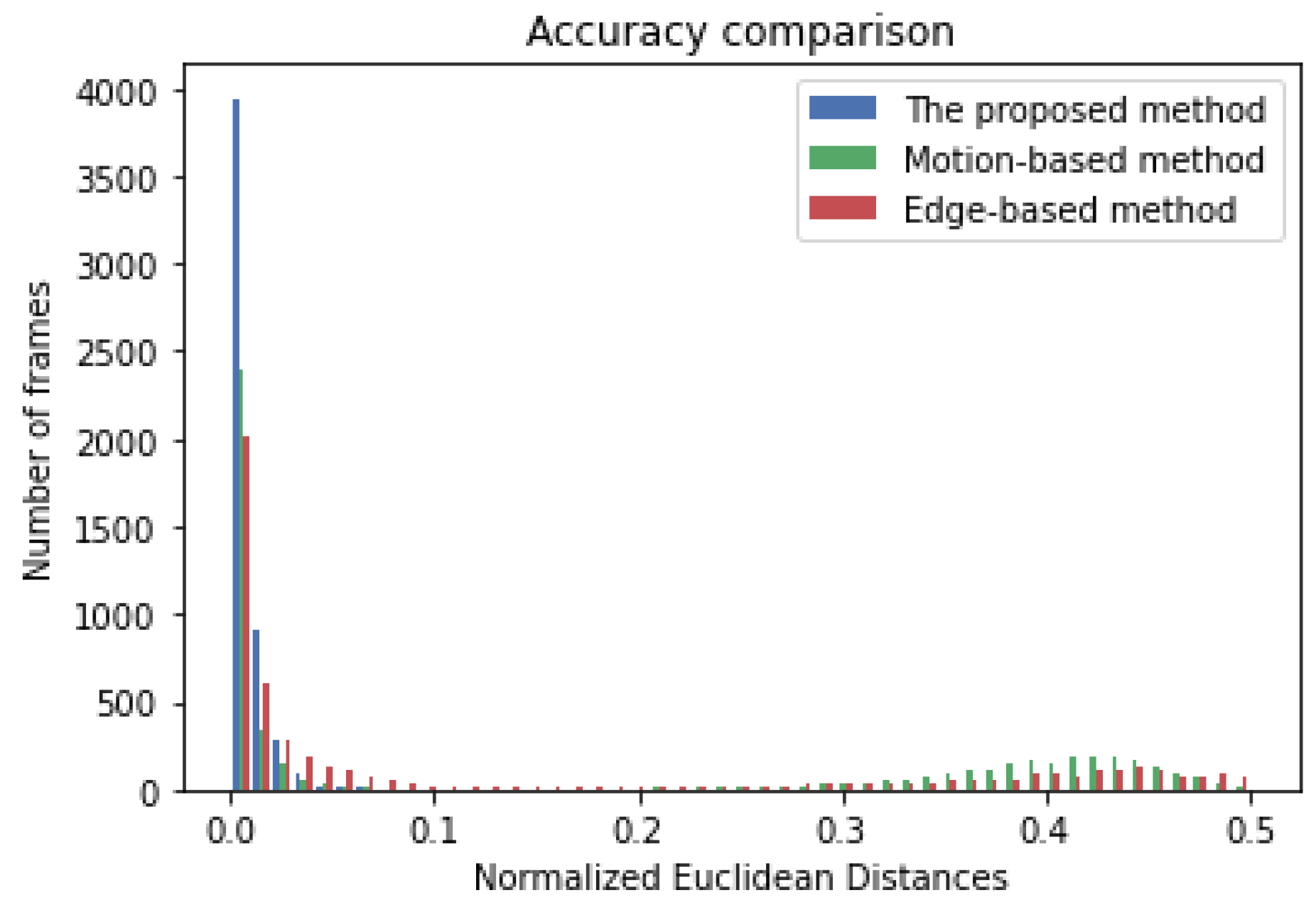
- The proposed R-VP detection method that consists of stable motion detection, stationary point-based motion vector selection, and angle-based RANSAC (RANdom SAmple Consensus) voting achieves high accuracy and robustness for real-world driving scenes.
2. Related Work
2.1. Main Processing Steps of The Existing R-VP Detection Methods
2.2. Motion Vector Detection and Selection
2.3. Voting Method
3. Proposed Method
3.1. Stable Motion Vector Detection
3.2. Stationary Point-Based Motion Vector Selection
3.2.1. Reduction of Motion Vector Type 2
3.2.2. Reduction of Motion Vector Type 3
3.3. Angle-Based RANSAC Voting Method
4. Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hearn, D.; Baker, M.P. Chapter 12: Three-Dimensional Viewing. In Computer Graphics C Version, 2nd ed.; Pearson: Noida, India, 1997; pp. 446–447. [Google Scholar]
- Guo, X.; Li, Q.; Sun, C. A new road tracking method based on heading direction detection. J. Automob. Eng. 2018, 233, 232–248. [Google Scholar] [CrossRef]
- Orghidan, R.; Salvi, J.; Gordan, M.; Orza, B. Camera calibration using two or three vanishing points. In Proceedings of the Federated Conference on Computer Science and Information Systems (FedCSIS), Wrocław, Poland, 9–12 September 2012; pp. 123–130. [Google Scholar]
- Chang, C.; Zhao, J.; Itti, L. DeepVP: Deep Learning for Vanishing Point Detection on 1 Million Street View Images. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 4496–4503. [Google Scholar]
- Xingxin, L.; Liqiang, Z.; Zujun, Y.; Yanqin, W. Adaptive auxiliary input extraction based on vanishing point detection for distant object detection in high-resolution railway scene. In Proceedings of the 14th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Changsha, China, 1–3 November 2019; pp. 522–527. [Google Scholar]
- Zeng, Z.; Wu, M.; Zeng, W.; Fu, C.W. Deep Recognition of Vanishing-Point-Constrained Building Planes in Urban Street Views. IEEE Trans. Image Process. 2020, 29, 5912–5923. [Google Scholar] [CrossRef]
- Han-Soo, C.; Keunhoi, A.; Myungjoo, K. Regression with residual neural network for vanishing point detection. Image Vis. Comput. J. Books 2019, 91, 103797. [Google Scholar]
- Liu, Y.B.; Zeng, M.; Meng, Q.H. Unstructured Road Vanishing Point Detection Using Convolutional Neural Networks and Heatmap Regression. IEEE Trans. Instrum. Meas. 2020, 70, 1–8. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, X.; Ling, Z.; Yang, Y.; Zhang, Z.; Wang, K. A Method to Calibrate Vehicle-Mounted Cameras under Urban Traffic Scenes. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3270–3279. [Google Scholar] [CrossRef]
- Yoo, J.H.; Lee, S.; Park, S.; Kim, D.H. A Robust Lane Detection Method Based on Vanishing Point Estimation Using the Relevance of Line Segments. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3254–3266. [Google Scholar] [CrossRef]
- Ding, W.; Li, Y. Efficient vanishing point detection method in complex urban road environments. IET Comput. Vis. 2015, 9, 549–558. [Google Scholar] [CrossRef]
- Wang, E.; Sun, A.; Li, Y.; Hou, X.; Zhu, Y. Fast vanishing point detection method based on road border region estimation. IET Image Process. 2018, 12, 361–373. [Google Scholar] [CrossRef]
- Zhang, Y.; Su, Y.; Yang, J.; Ponce, J.; Kong, H. When Dijkstra Meets Vanishing Point: A Stereo Vision Approach for Road Detection. IEEE Trans. Image Process. 2018, 27, 2176–2188. [Google Scholar] [CrossRef]
- Ding, W.; Li, Y.; Liu, H. Efficient vanishing point detection method in unstructured road environments based on dark channel prior. IET Comput. Vis. 2016, 10, 852–860. [Google Scholar] [CrossRef] [Green Version]
- Hwang, H.J.; Yoon, G.; Yoon, S.M. Optimized Clustering Scheme-Based Robust Vanishing Point Detection. IEEE Trans. Intell. Transp. Syst. 2020, 21, 199–208. [Google Scholar] [CrossRef]
- VanQuang, N.; Heungsuk, K.; SeoChang, J.; Kwangsuck, B. A Study on Real-Time Detection Method of Lane and Vehicle for Lane Change Assistant System Using Vision System on Highway. Eng. Sci. Technol. Int. J. 2018, 21, 822–833. [Google Scholar]
- Kim, J. Efficient Vanishing Point Detection for Driving Assistance Based on Visual Saliency Map and Image Segmentation from a Vehicle Black-Box Camera. Symmetry 2019, 11, 1492. [Google Scholar] [CrossRef] [Green Version]
- Pei, L.; Liu, K.; Zou, D.; Li, T.; Wu, Q.; Zhu, Y.; Li, Y.; He, Z.; Chen, Y.; Sartori, D. IVPR: An Instant Visual Place Recognition Approach Based on Structural Lines in Manhattan World. IEEE Trans. Instrum. Meas. 2020, 69, 4173–4187. [Google Scholar] [CrossRef]
- Li, B.; Guo, Y.; Zhou, J.; Cai, Y.; Xiao, J.; Zeng, W. Lane Detection and Road Surface Reconstruction Based on Multiple Vanishing Point & Symposia. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Changshu, Suzhou, 30 June–1 July 2018; pp. 209–214. [Google Scholar]
- Suttorp, T.; Bucher, T. Robust vanishing point estimation for driver assistance. In Proceedings of the IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 1550–1555. [Google Scholar]
- Young-Woo, S.; Ragnunathan, R. Detection and tracking of the vanishing point on a horizon for automotive applications. In Proceedings of the 6th IEEE IROS Workshop on Planning, Perception and Navigation for Intelligent Vehicles (PPNIV-14), Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Kroeger, T.; Dai, D.; Timofte, R.; Van Gool, L. Discovery of Sets of Mutually Orthogonal Vanishing Points in Videos. In Proceedings of the 2015 IEEE Winter Applications and Computer Vision Workshops, Waikoloa, HI, USA, 6–9 January 2015; pp. 63–70. [Google Scholar]
- Ju-Han, Y.; Dong-Hwan, K.; Sung-Kee, P. A new lane detection method based on vanishing point estimation with probabilistic voting. In Proceedings of the IEEE International Conference on Consumer Electronics (ICCE), Berlin, Germany, 6–9 September 2015; pp. 204–205. [Google Scholar]
- Young-woo, S.; Ragunathan, R. Use of a monocular camera to analyze a ground vehicle’s lateral movements for reliable autonomous city driving. In Proceedings of the IEEE IROS Workshop on Planning, Perception and Navigation for Intelligent Vehicles, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Tian, Y.; Cui, W.; Li, X.; Chen, L. A Robust Lane Detection Method Based on Vanishing Point Estimation. Procedia Comput. Sci. 2018, 131, 354–360. [Google Scholar]
- Piao, J.; Shin, H. Robust hypothesis generation method using binary blob analysis for multi-lane detection. IET Image Process. 2017, 11, 1210–1218. [Google Scholar] [CrossRef]
- Yong, L.; Weili, D.; XuGuang, Z.; Zhaojie, J. Road detection algorithm for Autonomous Navigation Systems based on dark channel prior and vanishing point in complex road scenes. Robot. Auton. Syst. 2016, 85, 1–11. [Google Scholar]
- Jiaming, H.; Zhong, Y.; Guoxiong, H.; Ting, F.; Hao, X. Robust and efficient vanishing point detection in unstructured road scenes for assistive navigation. Sens. Rev. 2018, 39, 137–146. [Google Scholar]
- Bazin, J.; Pollefeys, M. 3-line RANSAC for orthogonal vanishing point detection. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 4282–4287. [Google Scholar]
- Yoon-Young, M.; Zong-Woo, G.; Gi-Tae, H. Vanishing point detection for self-driving car using harmony search algorithm. Swarm Evol. Comput. 2018, 41, 111–119. [Google Scholar]
- Su, Y.; Zhang, Y.; Alvarez, J.M.; Kong, H. An illumination-invariant nonparametric model for urban road detection using monocular camera and single-line lidar. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 68–73. [Google Scholar]
- Mistry, V.H.; Makwana, R.M. Computationally efficient vanishing point detection algorithm based road segmentation in road images. In Proceedings of the IEEE International Conference on Advances in Electronics, Communication and Computer Technology (ICAECCT), New York, NY, USA, 2–3 December 2016; pp. 103–110. [Google Scholar]
- Wang, Z.; Qu, W.; Kamata, S. Vehicle detection from onboard camera using patch decided vanishing point. In Proceedings of the 10th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 14–16 October 2017; pp. 1–7. [Google Scholar]
- Yu, Z.; Zhu, L. Roust Vanishing Point Detection Based on the Combination of Edge and Optical Flow. In Proceedings of the 4th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Nagoya, Japan, 13–15 July 2019; pp. 184–188. [Google Scholar]
- Yu, Z.; Zhu, L.; Lu, G. An Improved Phase Correlation Method for Stop Detection of Autonomous Driving. IEEE Access 2020, 8, 77972–77986. [Google Scholar] [CrossRef]
- Jang, J.; Jo, Y.; Shin, M.; Paik, J. Camera Orientation Estimation Using Motion-Based Vanishing Point Detection for Advanced Driver-Assistance Systems. IEEE Trans. Intell. Transp. Syst. 2020, 1–11. [Google Scholar] [CrossRef]
- Jo, Y.; Jang, J.; Paik, J. Camera orientation estimation using motion based vanishing point detection for automatic driving assistance system. In Proceedings of the IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; pp. 1–2. [Google Scholar]
- Yang, W.; Fang, B.; Tang, Y.Y. Fast and Accurate Vanishing Point Detection and Its Application in Inverse Perspective Mapping of Structured Road. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 755–766. [Google Scholar] [CrossRef]
- Yang, G.; Wang, Y.; Yang, J.; Lu, Z. Fast and Robust Vanishing Point Detection Using Contourlet Texture Detector for Unstructured Road. IEEE Access 2019, 7, 139358–139367. [Google Scholar] [CrossRef]
- Moghadam, P.; Dong, J.F. Road direction detection based on vanishing-point tracking. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 1553–1560. [Google Scholar]
- Hui, K.; Jean-Yves, A.; Jean, P. Vanishing point detection for road detection. In Proceedings of the CVPR 2009—IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–21 June 2009; pp. 96–103. [Google Scholar]
- Min, Z.; Yisha, L.; Yan, Z.; Huosheng, H. Visual Campus Road Detection for an UGV using Fast Scene Segmentation and Rapid Vanishing Point Estimation. IFAC Proc. Vol. 2014, 47, 11898–11903. [Google Scholar]
- Deng, T.; Yan, H.; Li, Y. Learning to Boost Bottom-Up Fixation Prediction in Driving Environments via Random Forest. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3059–3067. [Google Scholar] [CrossRef]
- Moghadam, P.; Starzyk, J.A.; Wijesoma, W.S. Fast Vanishing-Point Detection in Unstructured Environments. IEEE Trans. Image Process. 2012, 21, 425–430. [Google Scholar] [CrossRef]
- Shi, J.; Wang, J.; Fu, F. Fast and Robust Vanishing Point Detection for Unstructured Road Following. IEEE Trans. Intell. Transp. Syst. 2016, 17, 970–979. [Google Scholar] [CrossRef]
- Fan, X.; Shin, H. Road vanishing point detection using weber adaptive local filter and salient-block-wise weighted soft voting. IET Comput. Vis. 2016, 10, 503–512. [Google Scholar] [CrossRef]
- Yong, L.; Guofeng, T.; Anan, S.; Weili, D. Road extraction algorithm based on intrinsic image and vanishing point for unstructured road image. Robot. Auton. Syst. 2018, 109, 86–96. [Google Scholar]
- Bui, T.H.; Saitoh, T.; Nobuyama, E. Road area detection based on texture orientations estimation and vanishing point detection. In Proceedings of the The SICE Annual Conference, Nagoya, Japan, 14–17 September 2013; pp. 1138–1143. [Google Scholar]
- Neethu, J.; Anusha, B.; Krishnan, K. A Reliable Method for Detecting Road Regions from a Single Image Based on Color Distribution and Vanishing Point Location. Procedia Comput. Sci. 2015, 58, 2–9. [Google Scholar]
- Zhaozi, Z.; Yingtuan, H.; Dixiao, C.; Jianru, X. Real-time road detection with image texture analysis-based vanishing point estimation. In Proceedings of the IEEE International Conference on Progress in Informatics and Computing (PIC), Nanjing, China, 18–20 December 2015; pp. 454–457. [Google Scholar]
- Le, M.C.; Phung, S.L.; Bouzerdoum, A. Pedestrian Lane Detection in Unstructured Environments for Assistive Navigation. In Proceedings of the International Conference on Digital Image Computing: Techniques and Applications (DICTA), Wollongong, Australia, 25–27 November 2014; pp. 1–8. [Google Scholar]
- Nguyen, L.; Phung, S.L.; Bouzerdoum, A. Efficient Vanishing Point Estimation for Unstructured Road Scenes. In Proceedings of the International Conference on Digital Image Computing: Techniques and Applications (DICTA), Gold Coast, Australia, 30 November–2 December 2016; pp. 1–6. [Google Scholar]
- Negahdaripour, S.; Horn, B.K.P. A direct method for locating the focus of expansion. Comput. Vis. Graph. Image Process. J. 1989, 46, 303–326. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Tomasi, C. Good features to track. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Lucas, B.D.; Kanade, T. An Iterative Image Registration Technique with an Application to Stereo Vision. In Proceedings of the 7th international joint conference on Artificial intelligence (IJCAI’81), Vancouver, BC, Canada, 24–28 August 1981; pp. 674–679. [Google Scholar]
- Jiqing Expressway Dataset. Available online: https://github.com/vonsj0210/Multi-Lane-Detection-Dataset-with-Ground-Truth (accessed on 8 February 2021).
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. SURF: Speeded-Up Robust Features. Comput. Vis. Image Underst. 2008, 404–417. [Google Scholar] [CrossRef]
- David, A.F.; Jean, P. Chapter 17: Segmentation and fitting using probabilistic methods. In Computer Vision: A Modern Approach; Prentice Hall Professional Technical Reference; Prentice Hall: Upper Saddle River, NJ, USA, 2002; p. 483. ISBN 978-0-13-085198-7. [Google Scholar]
- Zhou, K.; Wang, K.; Yang, K. A Robust Monocular Depth Estimation Framework Based on Light-Weight ERF-PSPNet for Day-Night Driving Scenes. In Proceedings of the International Conference on Machine Vision and Information Technology (CMVIT), Sanya, China, 20–22 February 2020. [Google Scholar]
- ZJU Day and Night Driving Dataset. Available online: https://github.com/elnino9ykl/ZJU-Dataset (accessed on 1 March 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | RANSAC Iterations | Average of Error | Standard Deviationof Error | Average of Time Processing (ms) | ||
|---|---|---|---|---|---|---|
| Edge-based method | 900 | 0.0191347 | 0.2454778 | 611.20 | ||
| Motion-based method | 900 | 0.0148898 | 0.2088319 | 147.92 | ||
| The proposed method | Reduction of type 2 | Reduction of type 3 | ||||
| ✘ | ✘ | 900 | 0.0075473 | 0.0101119 | 446.42 | |
| ✓ | ✘ | 900 | 0.0049879 | 0.0080097 | 410.22 | |
| ✘ | ✓ | 900 | 0.0051795 | 0.0091563 | 339.21 | |
| ✓ | ✓ | 900 | 0.0038549 | 0.0073061 | 287.07 | |
| ✓ | ✓ | 45 | 0.0042509 | 0.0073760 | 62.57 | |
| Bright Days | Slightly Dark Days | In Tunnels | ||||
|---|---|---|---|---|---|---|
| Average of Error | Standard Deviation | Average of Error | Standard Deviation | Average of Error | Standard Deviation | |
| The proposed method with RANSAC iteration 900 | 0.0041823 | 0.0072681 | 0.0041252 | 0.0073249 | 0.0032571 | 0.0073250 |
| The proposed method with RANSAC iteration 45 | 0.0045382 | 0.0073146 | 0.0046241 | 0.0074313 | 0.0035902 | 0.0073825 |
| Methods | RANSAC Iterations | Average of Error | Standard Deviationof Error | Average of Time Processing (ms) |
|---|---|---|---|---|
| The proposed method using SIFT | 900 | 0.0091880 | 0.0100742 | 1500.37 |
| 45 | 0.0106574 | 0.0113037 | 1335.65 | |
| The proposed method using SURF | 900 | 0.0132818 | 0.0159866 | 728.19 |
| 45 | 0.0146137 | 0.0162612 | 632.57 |
| Methods | RANSAC Iterations | Average of Error | Standard Deviationof Error | Average of Time Processing (ms) |
|---|---|---|---|---|
| The proposed method using distance-based RANSAC | 900 | 0.0093751 | 0.0136126 | 283.61 |
| 45 | 0.0112964 | 0.0138230 | 61.82 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khac, C.N.; Choi, Y.; Park, J.H.; Jung, H.-Y. A Robust Road Vanishing Point Detection Adapted to the Real-world Driving Scenes. Sensors 2021, 21, 2133. https://doi.org/10.3390/s21062133
Khac CN, Choi Y, Park JH, Jung H-Y. A Robust Road Vanishing Point Detection Adapted to the Real-world Driving Scenes. Sensors. 2021; 21(6):2133. https://doi.org/10.3390/s21062133
Chicago/Turabian StyleKhac, Cuong Nguyen, Yeongyu Choi, Ju H. Park, and Ho-Youl Jung. 2021. "A Robust Road Vanishing Point Detection Adapted to the Real-world Driving Scenes" Sensors 21, no. 6: 2133. https://doi.org/10.3390/s21062133