
Specular Detection on Glossy Surface Using Geometric Characteristics of Specularity in Top-View Images



Abstract
:1. Introduction
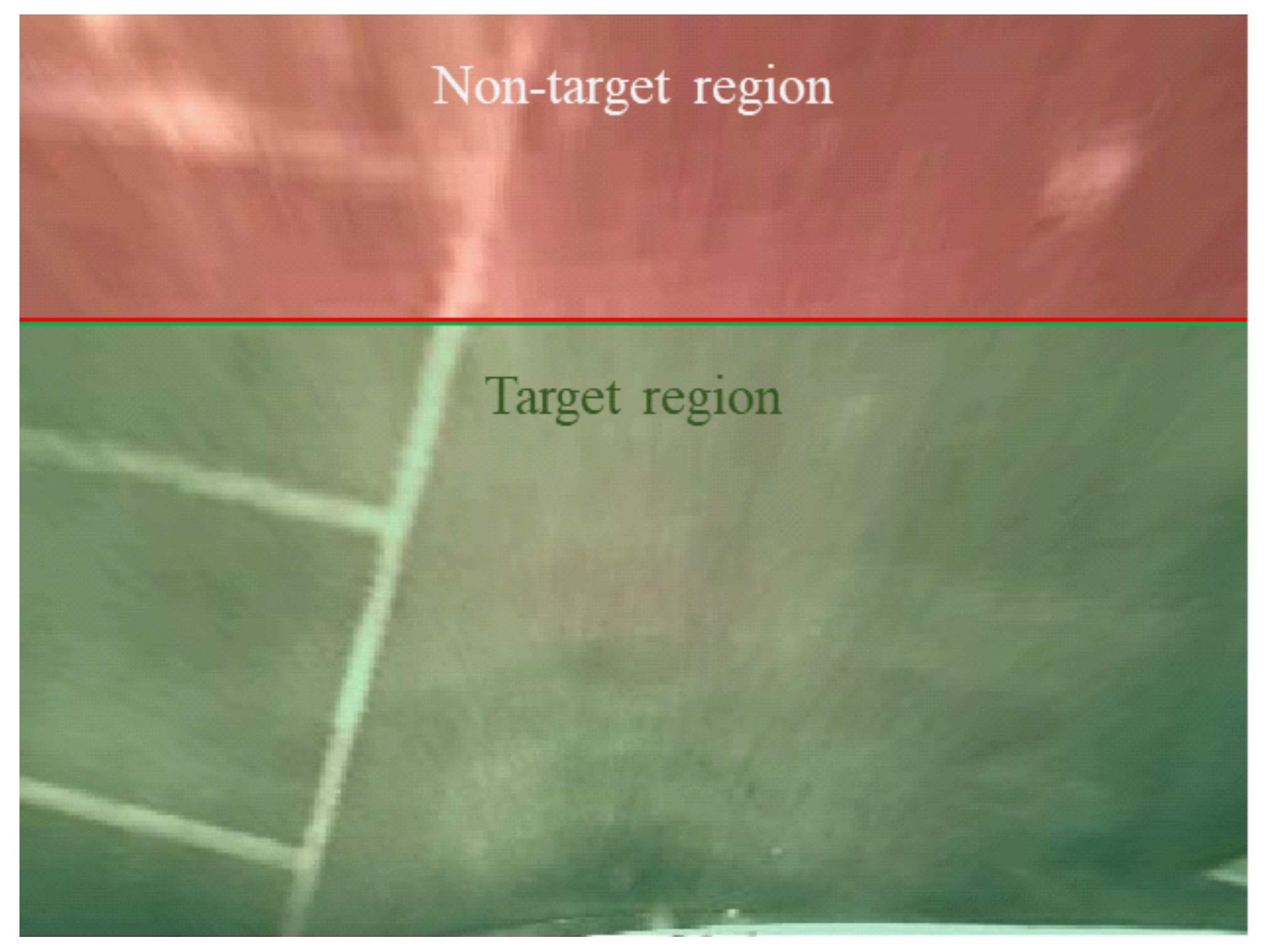
- The geometric property of specularity is used to identify specular pixels. We tried to use the orientational characteristic of the specularity in the image to overcome the limitations of color-based approaches in the line detection.
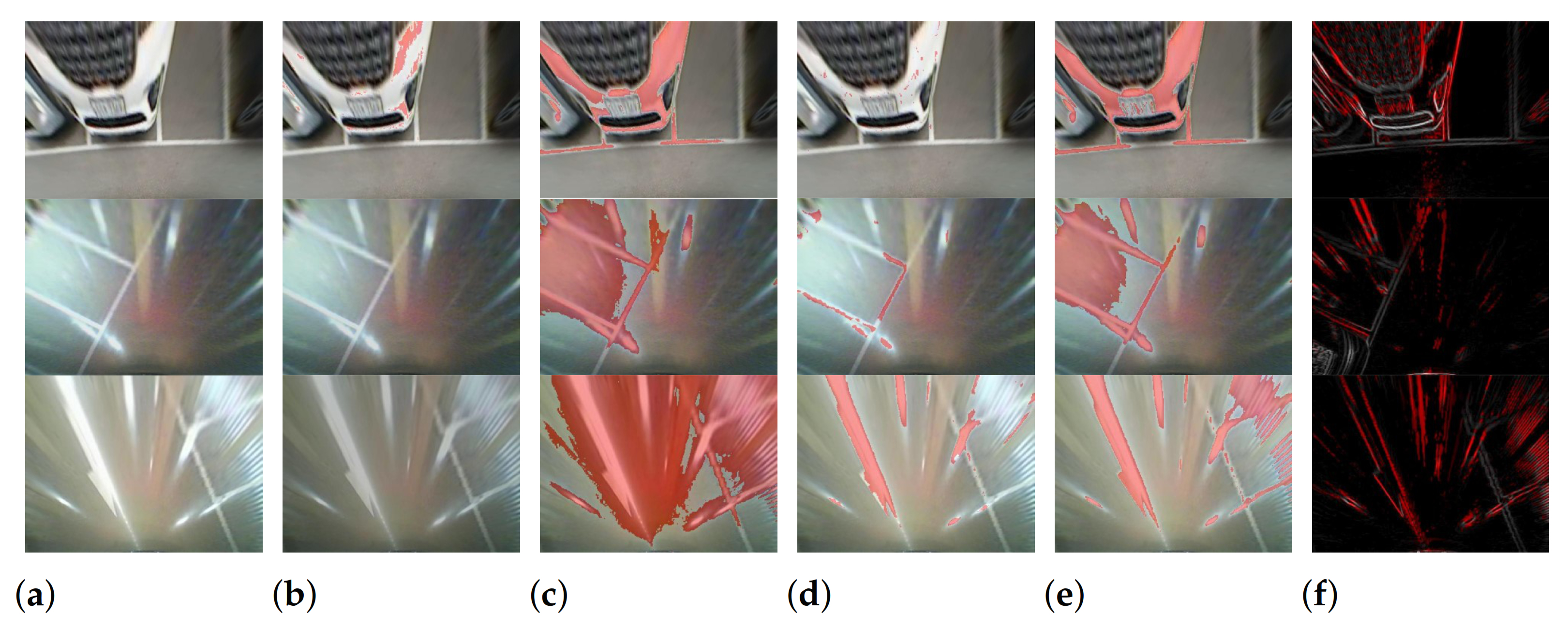
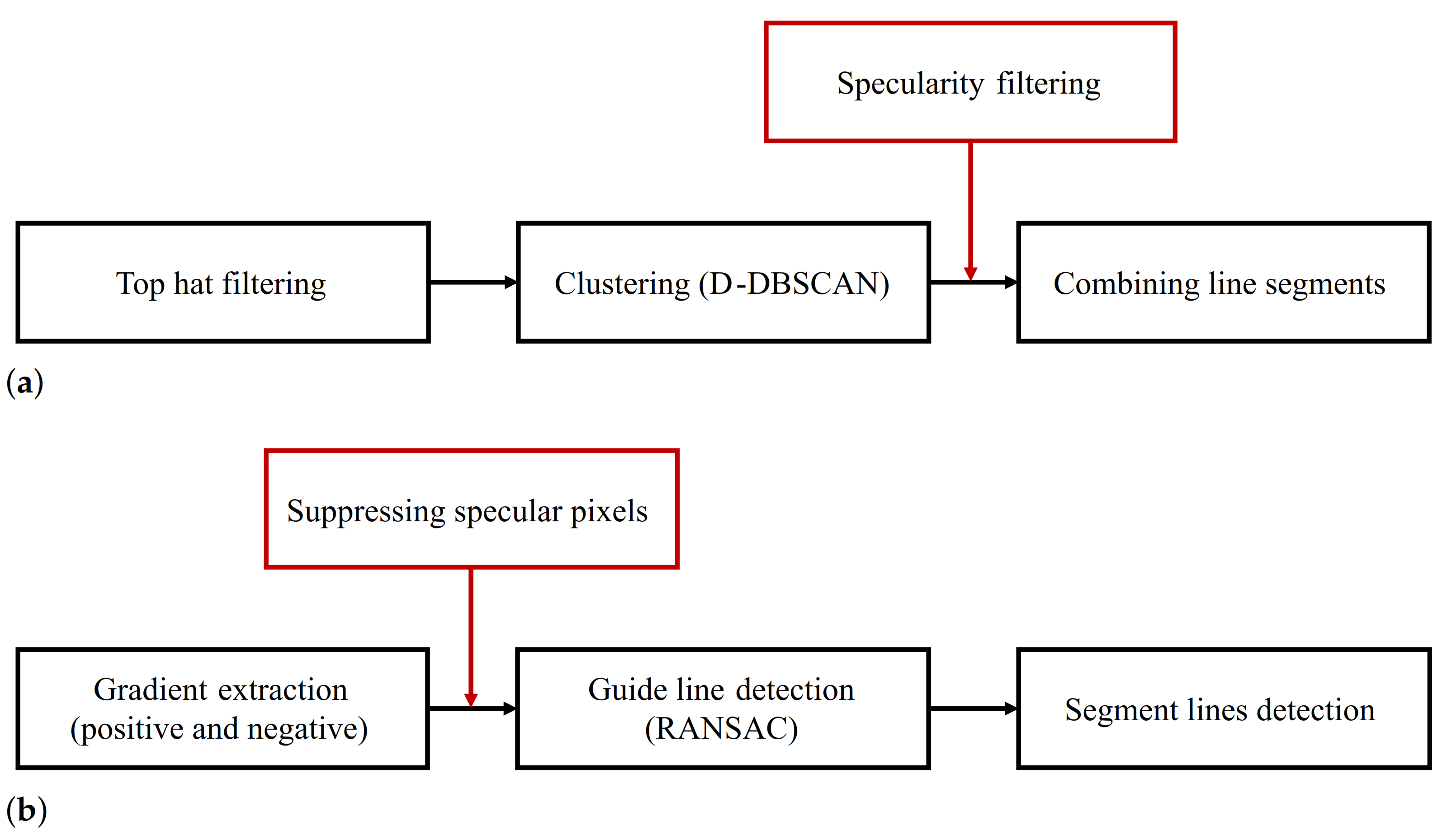
- Two methods which can be applied to the line detection using the top-view image are presented. Our two methods estimate the specularity using the intermediate outputs of line filter-based and edge-based line detection approaches.
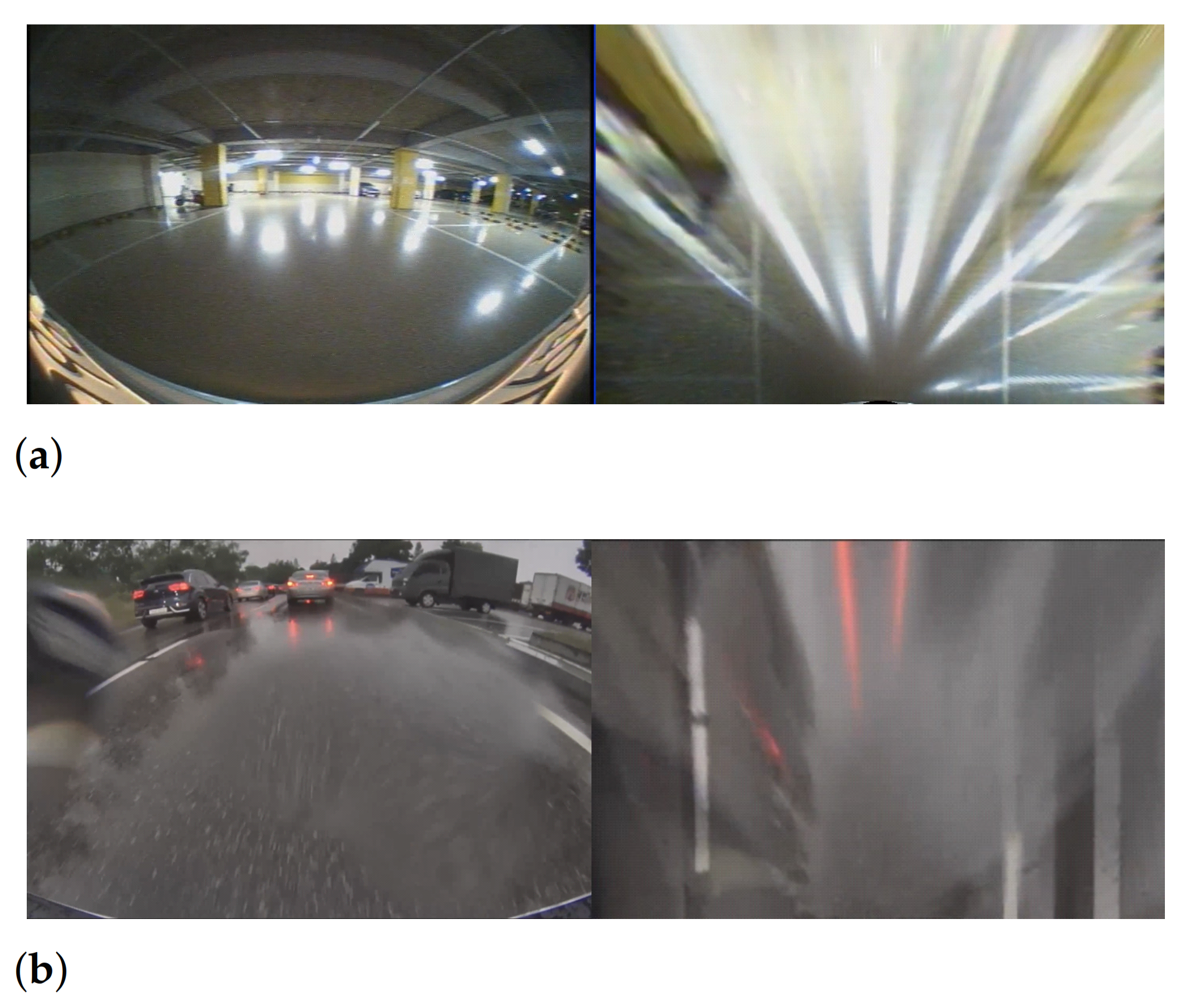
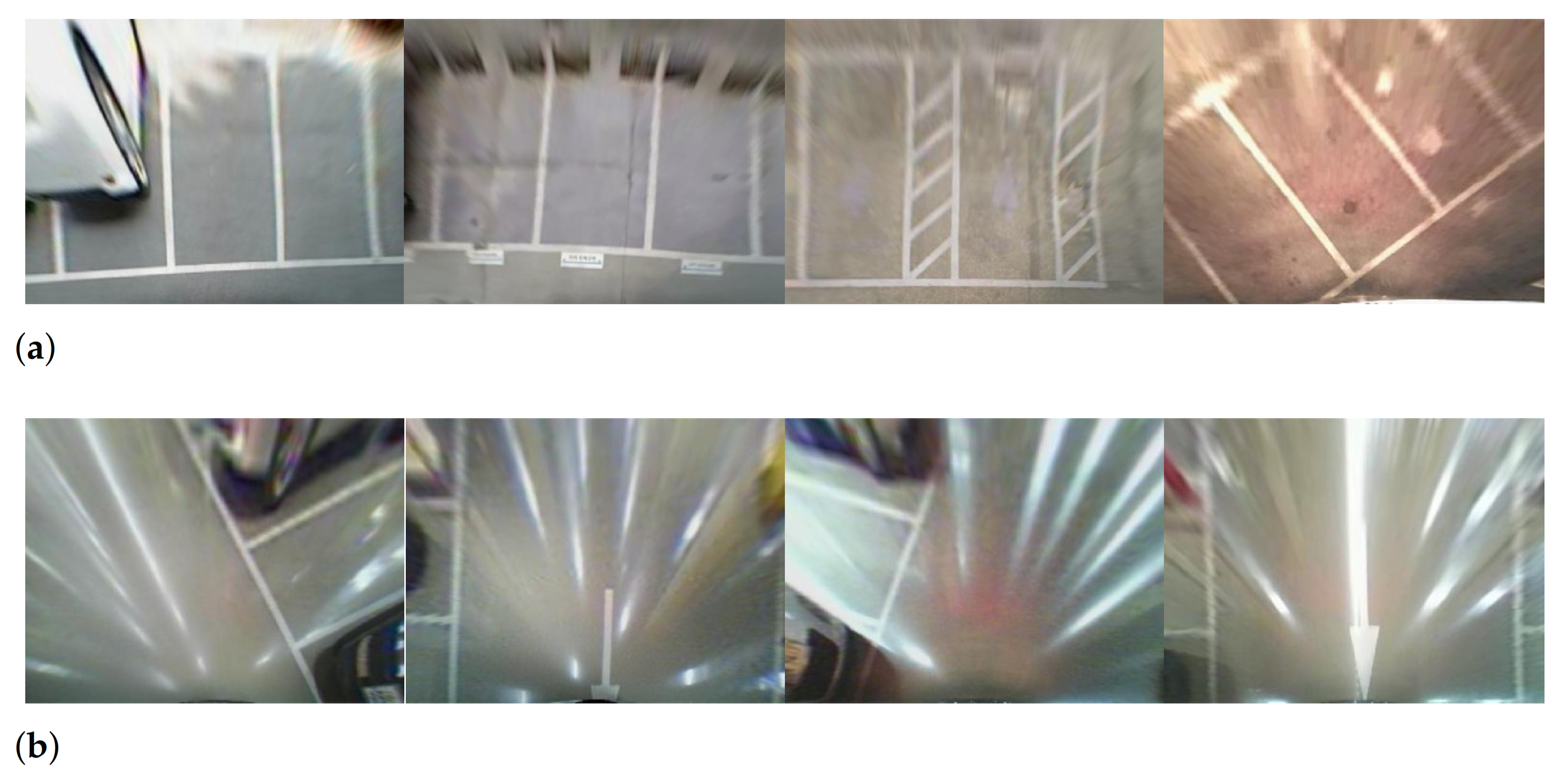
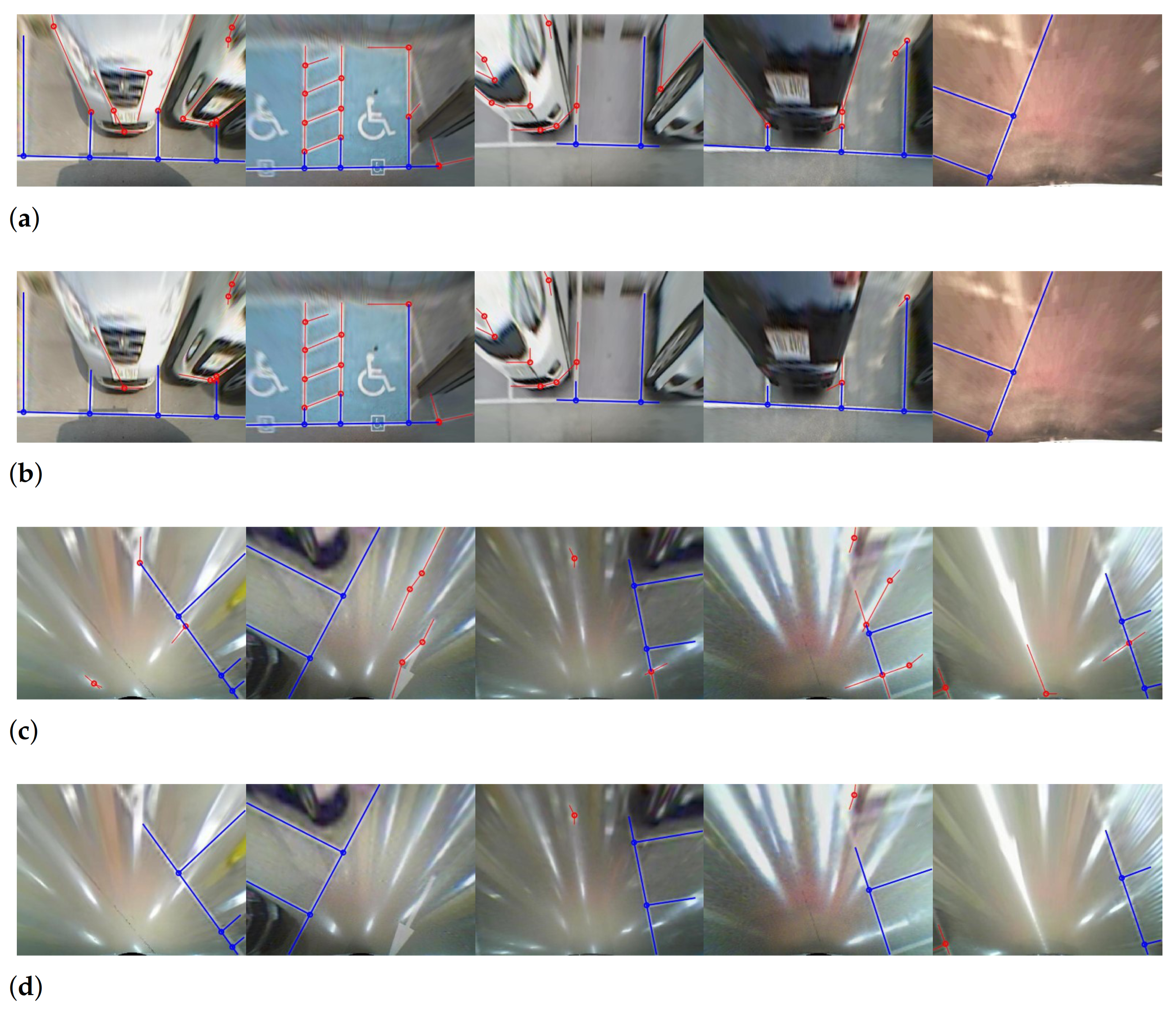
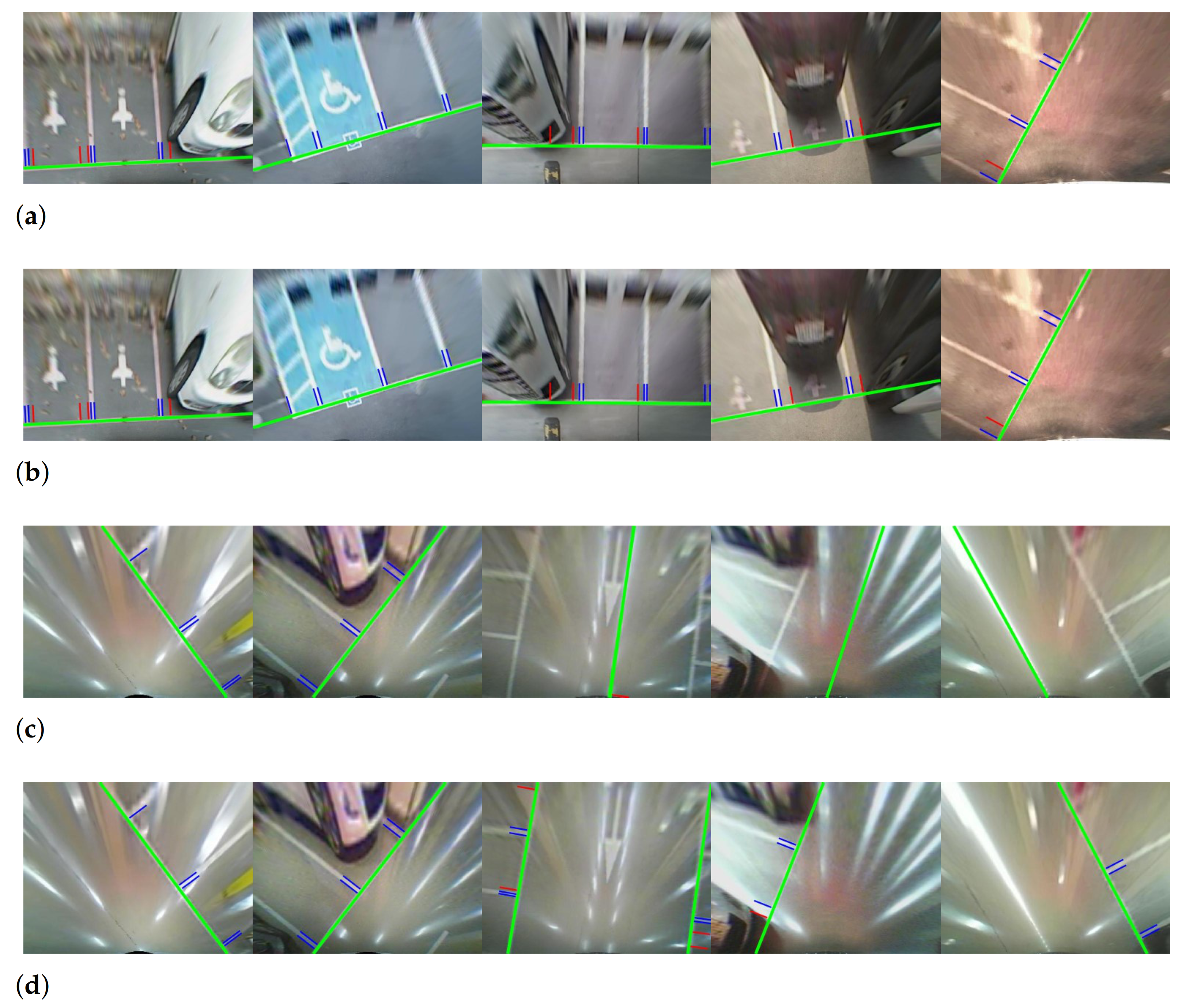
- The proposed methods were tested using real-world applications and environments. We applied our methods to existing parking stall detection methods, to demonstrate that our methods can remove artifacts caused by the specularity in various environments.
2. Related Works
2.1. Threshold-Based Approaches
2.2. Deep Learning-Based Approaches
3. Proposed Method
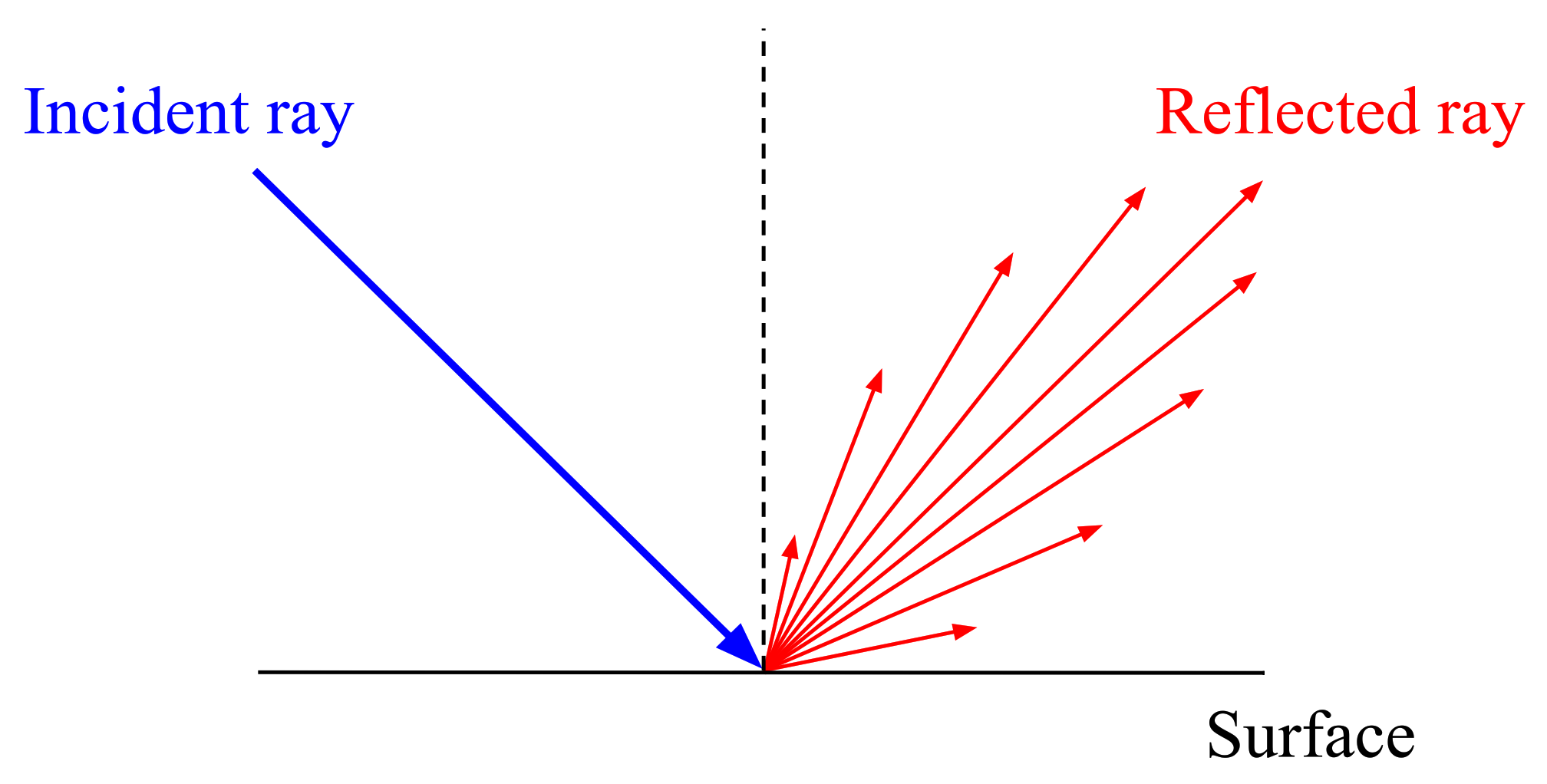
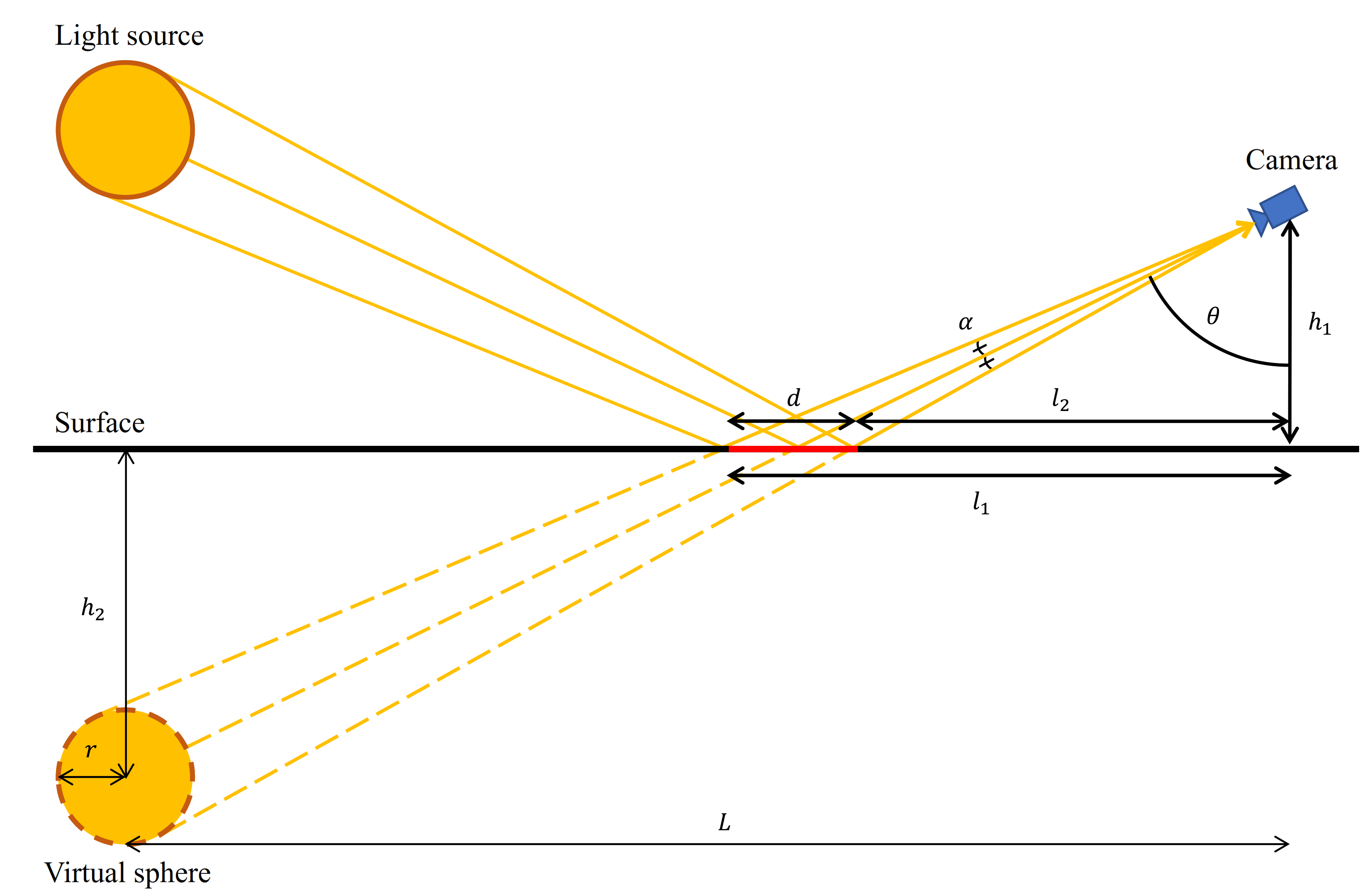
3.1. The Geometric Property of Specularity
- d is the major axis of an ellipse from the projection of the virtual sphere,
- is the reflection angle of the ray emitted from the center of the light source,
- L is the horizontal distance between the virtual sphere and the camera,
- r is the radius of the virtual sphere,
- is the horizontal distance between the camera and the vertex farthest away from the camera,
- is the horizontal distance between the camera and the vertex closest to the camera,
- is the height between the camera and the surface,
- is the height between the virtual sphere and the surface,
- a is angle between two lines; one is a tangent line to the virtual sphere from the camera and the other is a line passing through the center of the virtual sphere from the camera.
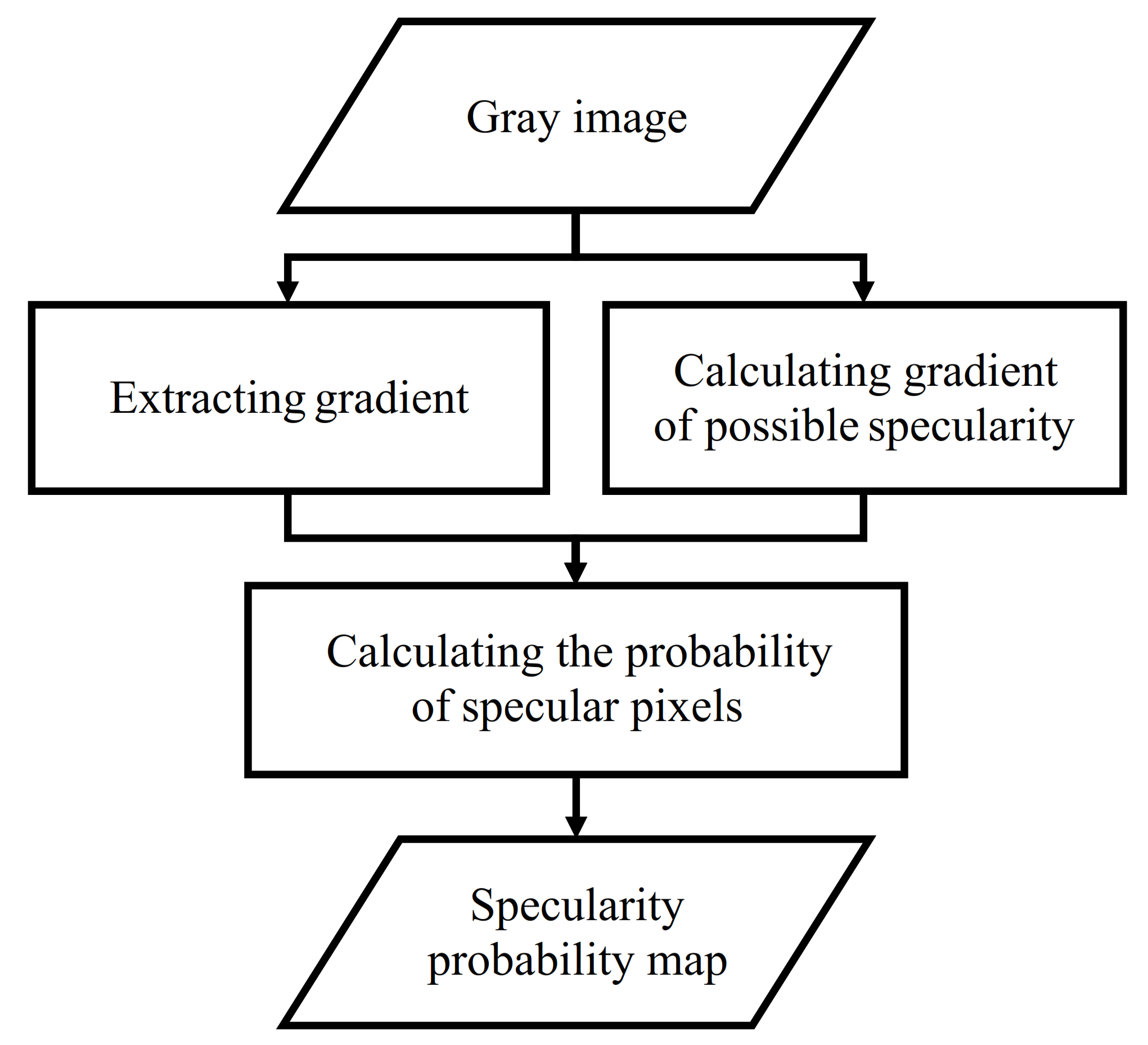
3.2. Pixel-Wise Specularity Estimation
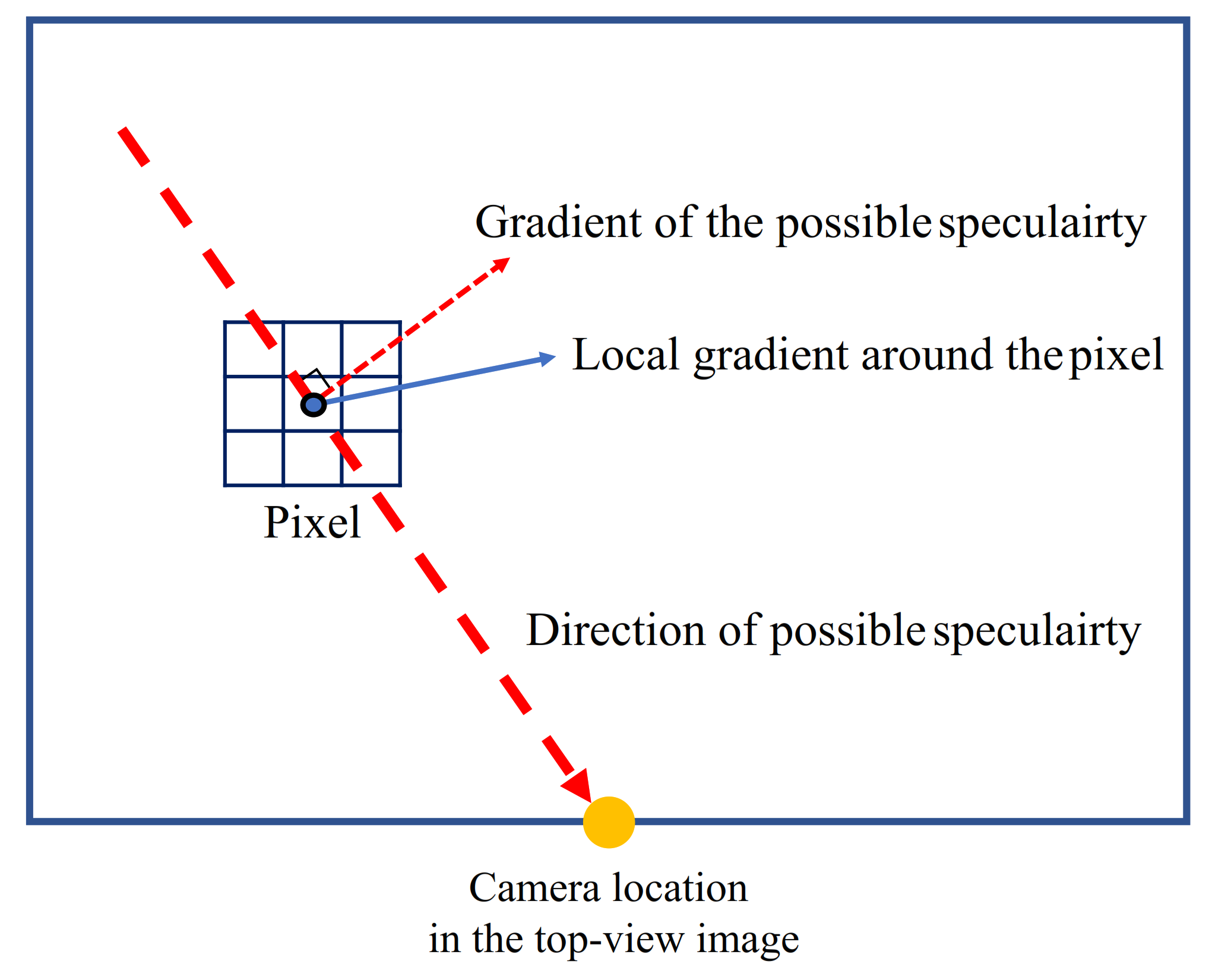
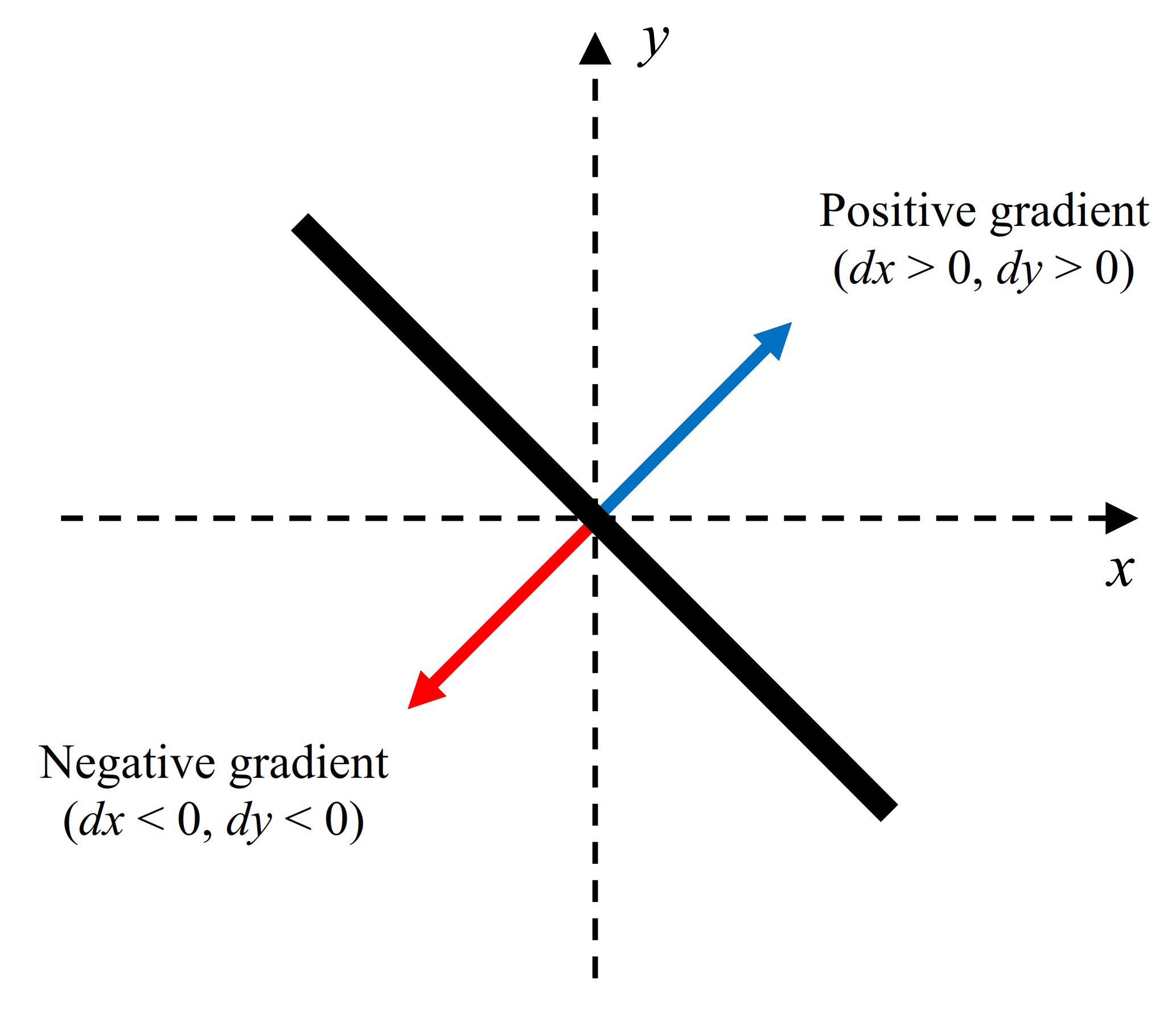
3.2.1. Extracting Gradient
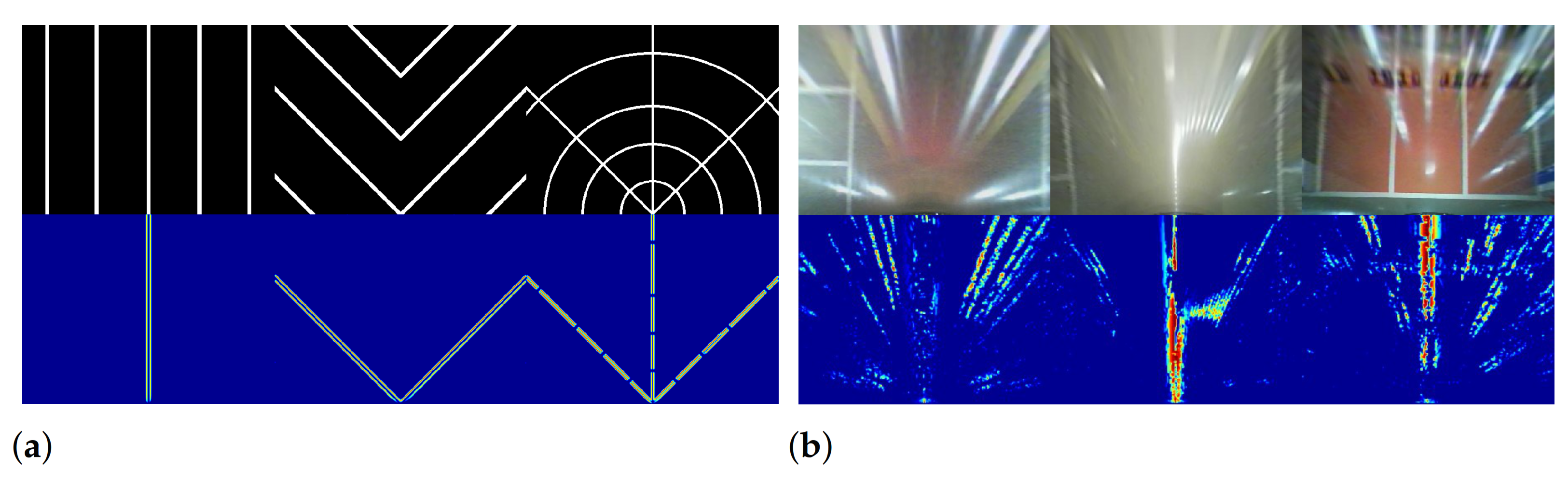
3.2.2. Calculating Gradient of Possible Specularity
3.2.3. Calculating the Probability of Specular Pixels
3.3. Line-Segment-Level Specularity Estimation
4. Experiments
4.1. Performance Evaluation Metrics
4.2. Quantitative Analysis
4.2.1. Implementations
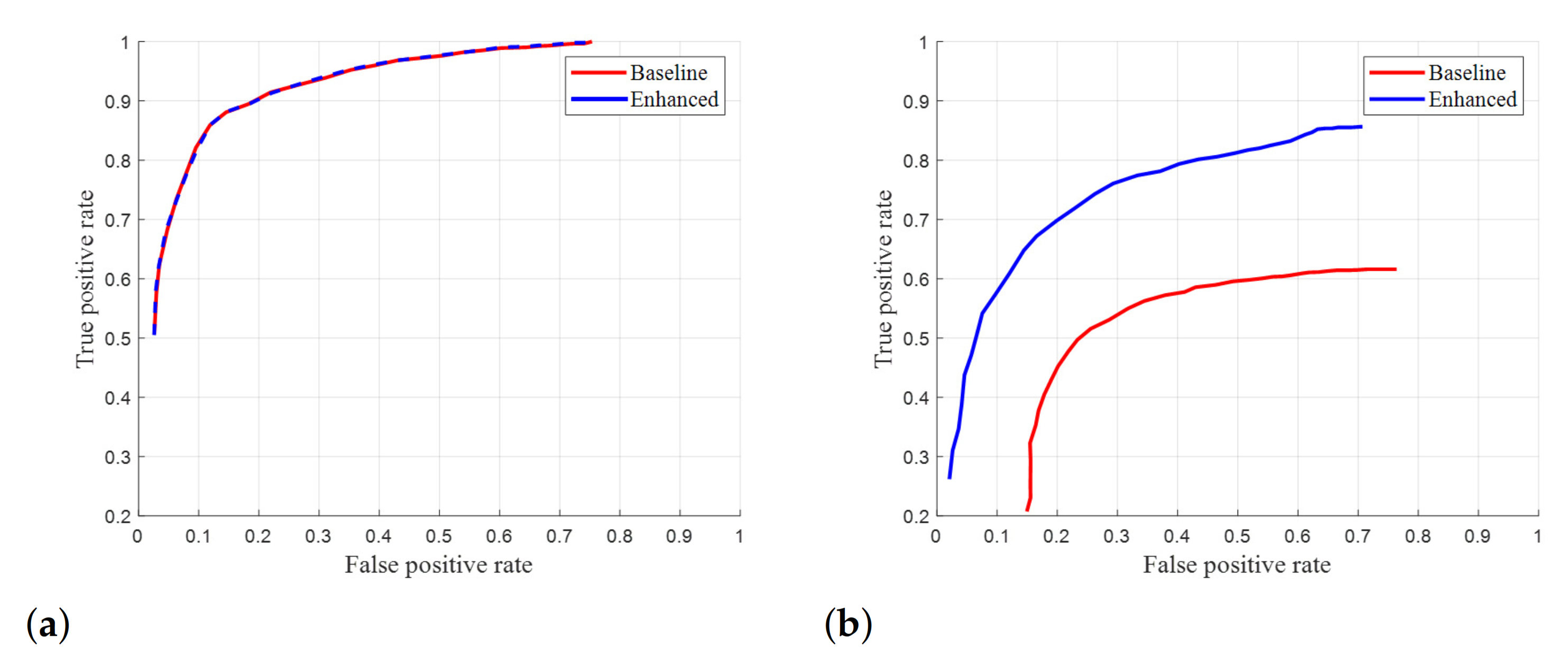
4.2.2. Quantitative Results
4.2.3. Running Time
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bertozzi, M.; Broggi, A.; Fascioli, A. Stereo inverse perspective mapping: Theory and applications. Image Vis. Comput. 1998, 16, 585–590. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, H.; Yang, M.; Wang, X.; Ye, L.; Guo, C. Automatic parking based on a bird’s eye view vision system. Adv. Mech. Eng. 2014. [Google Scholar] [CrossRef]
- Li, Q.; Chen, L.; Li, M.; Shaw, S.L.; Nüchter, A. A sensor-fusion drivable-region and lane-detection system for autonomous vehicle navigation in challenging road scenarios. IEEE Trans. Veh. Technol. 2014, 63, 540–555. [Google Scholar] [CrossRef]
- Takahashi, A.; Ninomiya, Y.; Ohta, M.; Nishida, M.; Yoshikawa, N. Image Processing Technology for Rear View Camera (1): Development of Lane Detection System. R D Rev. Toyota CRDL 2003, 38, 31–36. [Google Scholar]
- Jung, H.G.; Kim, D.S.; Yoon, P.J.; Kim, J. Parking Slot Markings Recognition for Automatic Parking Assist System. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Meguro-Ku, Japan, 13–15 June 2006. [Google Scholar] [CrossRef]
- Nieto, M.; Salgado, L.; Jaureguizar, F.; Arrospide, J. Robust multiple lane road modeling based on perspective analysis. In Proceedings of the 2008 15th IEEE International Conference on Image Processing, San Diego, CA, USA, 12–15 October 2008; pp. 2396–2399. [Google Scholar] [CrossRef] [Green Version]
- Hamada, K.; Hu, Z.; Fan, M.; Chen, H. Surround view based parking lot detection and tracking. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 1106–1111. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. Automatic Parking Space Detection and Tracking for Underground and Indoor Environments. IEEE Trans. Ind. Electron. 2016, 63, 5687–5698. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. A universal vacant parking slot recognition system using sensors mounted on off-the-shelf vehicles. Sensors 2018, 18, 1213. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sivaraman, S.; Trivedi, M.M. Integrated lane and vehicle detection, localization, and tracking: A synergistic approach. IEEE Trans. Intell. Transp. Syst. 2013. [Google Scholar] [CrossRef] [Green Version]
- Borkar, A.; Hayes, M.; Smith, M.T. A novel lane detection system with efficient ground truth generation. IEEE Trans. Intell. Transp. Syst. 2012, 13, 365–374. [Google Scholar] [CrossRef]
- Aly, M. Real time detection of lane markers in urban streets. In Proceedings of the IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 7–12. [Google Scholar] [CrossRef] [Green Version]
- Han, S.J.; Choi, J. Parking space recognition for autonomous valet parking using height and salient-line probability maps. ETRI J. 2015, 37, 1220–1230. [Google Scholar] [CrossRef]
- Lee, S.; Seo, S.W. Available parking slot recognition based on slot context analysis. IET Intell. Transp. Syst. 2016, 10, 594–604. [Google Scholar] [CrossRef]
- Lee, S.; Hyeon, D.; Park, G.; Baek, I.J.; Kim, S.W.; Seo, S.W. Directional-DBSCAN: Parking-slot detection using a clustering method in around-view monitoring system. In Proceedings of the IEEE Intelligent Vehicles Symposium, Gothenburg, Sweden, 19–22 June 2016; pp. 349–354. [Google Scholar] [CrossRef]
- Jung, S.; Youn, J.; Sull, S. Efficient lane detection based on spatiotemporal images. IEEE Trans. Intell. Transp. Syst. 2016. [Google Scholar] [CrossRef]
- Park, S.; Kim, D.; Yi, K. Vehicle localization using an AVM camera for an automated urban driving. In Proceedings of the IEEE Intelligent Vehicles Symposium, Gothenburg, Sweden, 19–22 June 2016; pp. 871–876. [Google Scholar] [CrossRef]
- Chen, J.Y.; Hsu, C.M. A visual method for the detection of available parking slots. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics, SMC 2017, Banff, AB, Canada, 5–8 October 2017; pp. 2980–2985. [Google Scholar] [CrossRef]
- Dorj, B.; Lee, D.J. A Precise Lane Detection Algorithm Based on Top View Image Transformation and Least-Square Approaches. J. Sens. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Allodi, M.; Castangia, L.; Cionini, A.; Valenti, F. Monocular parking slots and obstacles detection and tracking. In Proceedings of the IEEE Intelligent Vehicles Symposium, Gothenburg, Sweden, 19–22 June 2016; pp. 179–185. [Google Scholar] [CrossRef]
- Saint-Pierre, C.A.; Boisvert, J.; Grimard, G.; Cheriet, F. Detection and correction of specular reflections for automatic surgical tool segmentation in thoracoscopic images. Mach. Vis. Appl. 2011, 22, 171–180. [Google Scholar] [CrossRef]
- Tchoulack, S.; Langlois, J.M.; Cheriet, F. A video stream processor for real-time detection and correction of specular reflections in endoscopic images. In Proceedings of the 2008 Joint IEEE North-East Workshop on Circuits and Systems and TAISA Conference, NEWCAS-TAISA, Montreal, QC, Canada, 22–25 June 2008; pp. 49–52. [Google Scholar] [CrossRef]
- Chang, R.C.; Tseng, F.C. Automatic detection and correction for glossy reflections in digital photograph. In Proceedings of the 2010 3rd IEEE International Conference on Ubi-Media Computing, U-Media 2010, Jinhua, China, 5–6 July 2010; pp. 44–49. [Google Scholar] [CrossRef]
- Karapetyan, G.; Sarukhanyan, H. Automatic detection and concealment of specular reflections for endoscopic images. In Proceedings of the CSIT 2013—9th International Conference on Computer Science and Information Technologies, Revised Selected Papers, Yerevan, Armenia, 23–27 September 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Morgand, A.; Tamaazousti, M. Generic and real-time detection of specular reflections in images. In Proceedings of the VISAPP 2014—Proceedings of the 9th International Conference on Computer Vision Theory and Applications, Lisbon, Portugal, 5–8 January 2014; Volume 1, pp. 274–282. [Google Scholar] [CrossRef]
- Li, R.; Pan, J.; Si, Y.; Yan, B.; Hu, Y.; Qin, H. Specular Reflections Removal for Endoscopic Image Sequences with Adaptive-RPCA Decomposition. IEEE Trans. Med. Imaging 2020, 39, 328–340. [Google Scholar] [CrossRef]
- Guo, J.J.; Shen, D.F.; Lin, G.S.; Huang, J.C.; Liu, K.C.; Lie, W.N. A specular reflection suppression method for endoscopic images. In Proceedings of the 2016 IEEE 2nd International Conference on Multimedia Big Data, BigMM 2016, Taipei, Taiwan, 20–22 April 2016; pp. 125–128. [Google Scholar] [CrossRef]
- Silva, R.P.; Naozuka, G.T.; Mastelini, S.M.; Felinto, A.S. Automatic luminous reflections detector using global threshold with increased luminosity contrast in images. J. Electron. Imaging 2018, 27, 1. [Google Scholar] [CrossRef]
- Rodríguez-Sánchez, A.; Chea, D.; Azzopardi, G.; Stabinger, S. A deep learning approach for detecting and correcting highlights in endoscopic images. In Proceedings of the 7th International Conference on Image Processing Theory, Tools and Applications, IPTA 2017, Montreal, QC, Canada, 28 November–1 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Funke, I.; Bodenstedt, S.; Riediger, C.; Weitz, J.; Speidel, S. Generative adversarial networks for specular highlight removal in endoscopic images. In Medical Imaging 2018: Image-Guided Procedures, Robotic Interventions, and Modeling; Fei, B., Webster, R.J., III, Eds.; International Society for Optics and Photonics (SPIE): Bellingham, WA, USA, 2018; Volume 10576, pp. 8–16. [Google Scholar] [CrossRef]
- Poggi, M.; Aleotti, F.; Tosi, F.; Mattoccia, S. Towards Real-Time Unsupervised Monocular Depth Estimation on CPU. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 5848–5854. [Google Scholar] [CrossRef] [Green Version]
- Shafer, S.A. Using color to separate reflection components. Color Res. Appl. 1985, 10, 210–218. [Google Scholar] [CrossRef] [Green Version]
- Morgand, A.; Tamaazousti, M.; Bartoli, A. An Empirical Model for Specularity Prediction with Application to Dynamic Retexturing. In Proceedings of the 2016 IEEE International Symposium on Mixed and Augmented Reality, ISMAR 2016, Merida, Mexico, 19–23 September 2016; pp. 44–53. [Google Scholar] [CrossRef]
- Morgand, A.; Tamaazousti, M.; Bartoli, A. A Multiple-View Geometric Model of Specularities on Non-Planar Shapes with Application to Dynamic Retexturing. IEEE Trans. Vis. Comput. Graph. 2017, 23, 2485–2493. [Google Scholar] [CrossRef] [PubMed]
- Morgand, A.; Tamaazousti, M.; Bartoli, A. A Geometric Model for Specularity Prediction on Planar Surfaces with Multiple Light Sources. IEEE Trans. Vis. Comput. Graph. 2018, 24, 1691–1704. [Google Scholar] [CrossRef] [PubMed]
- Phong, B.T. Illumination for Computer Generated Pictures. Commun. ACM 1975, 18, 311–317. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Park, T.; Isola, P.; Efros, A.A. Unpaired Image-to-Image Translation Using Cycle-Consistent Adversarial Networks. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2242–2251. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.; Huang, H.; Portenier, T.; Sela, M.; Cohen-Or, D.; Kimmel, R.; Zwicker, M. Specular-to-Diffuse Translation for Multi-view Reconstruction. In Computer Vision–ECCV 2018; Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 193–211. [Google Scholar]
- Adamshuk, R.; Carvalho, D.; Neme, J.H.Z.; Margraf, E.; Okida, S.; Tusset, A.; Santos, M.M.; Amaral, R.; Ventura, A.; Carvalho, S. On the applicability of inverse perspective mapping for the forward distance estimation based on the HSV colormap. In Proceedings of the 2017 IEEE International Conference on Industrial Technology (ICIT), Toronto, ON, Canada, 22–25 March 2017; pp. 1036–1041. [Google Scholar] [CrossRef]
- Tomasi, C.; Manduchi, R. Bilateral filtering for gray and color images. In Proceedings of the IEEE International Conference on Computer Vision, Bombay, India, 4–7 January 1998; pp. 839–846. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence Number | # of Images | Environment | Specularity |
|---|---|---|---|
| 1 | 56 | Outdoor | Absent |
| 2 | 58 | Outdoor | Absent |
| 3 | 48 | Outdoor | Absent |
| 4 | 60 | Outdoor | Absent |
| 5 | 37 | Outdoor | Absent |
| 6 | 44 | Outdoor | Absent |
| 7 | 42 | Indoor | Present |
| 8 | 99 | Indoor | Present |
| 9 | 52 | Indoor | Present |
| 10 | 44 | Indoor | Present |
| 11 | 41 | Indoor | Present |
| 12 | 87 | Indoor | Present |
| Sequence Number | Precision (Baseline) | Precision (Enhanced) | Recall (Baseline) | Recall (Enhanced) |
|---|---|---|---|---|
| 1 | 49.43% | 57.46% | 85.53% | 86.18% |
| 2 | 49.37% | 56.52% | 82.98% | 82.98% |
| 3 | 70.94% | 79.12% | 85.21% | 85.21% |
| 4 | 54.81% | 57.81% | 82.22% | 82.22% |
| 5 | 40.28% | 50.60% | 75.22% | 75.22% |
| 6 | 100.00% | 100.00% | 93.33% | 93.33% |
| 7 | 60.75% | 83.33% | 76.47% | 76.47% |
| 8 | 53.16% | 70.79% | 69.23% | 69.23% |
| 9 | 57.29% | 72.26% | 67.07% | 68.29% |
| 10 | 55.80% | 65.25% | 85.56% | 85.56% |
| 11 | 55.36% | 71.59% | 72.09% | 73.26% |
| 12 | 50.20% | 80.00% | 62.12% | 62.63% |
| Sequence Number | Precision (Baseline) | Precision (Enhanced) | Recall (Baseline) | Recall (Enhanced) |
|---|---|---|---|---|
| 1 | 53.24% | 53.86% | 98.94% | 98.94% |
| 2 | 67.49% | 67.32% | 93.20% | 93.20% |
| 3 | 70.11% | 69.92% | 98.47% | 98.47% |
| 4 | 33.49% | 33.53% | 98.60% | 98.60% |
| 5 | 38.29% | 37.17% | 96.59% | 97.16% |
| 6 | 53.82% | 53.82% | 97.78% | 97.78% |
| 7 | 83.52% | 83.33% | 89.41% | 91.18% |
| 8 | 38.13% | 37.75% | 75.00% | 78.30% |
| 9 | 69.01% | 67.79% | 35.98% | 73.78% |
| 10 | 83.33% | 83.78% | 86.11% | 86.11% |
| 11 | 77.85% | 76.51% | 67.44% | 73.84% |
| 12 | 56.73% | 77.81% | 14.75% | 69.25% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Ra, M.; Kim, W.-Y. Specular Detection on Glossy Surface Using Geometric Characteristics of Specularity in Top-View Images. Sensors 2021, 21, 2079. https://doi.org/10.3390/s21062079
Kim S, Ra M, Kim W-Y. Specular Detection on Glossy Surface Using Geometric Characteristics of Specularity in Top-View Images. Sensors. 2021; 21(6):2079. https://doi.org/10.3390/s21062079
Chicago/Turabian StyleKim, Seunghyun, Moonsoo Ra, and Whoi-Yul Kim. 2021. "Specular Detection on Glossy Surface Using Geometric Characteristics of Specularity in Top-View Images" Sensors 21, no. 6: 2079. https://doi.org/10.3390/s21062079