
ROBINA: Rotational Orbit-Based Inter-Node Adjustment for Acoustic Routing Path in the Internet of Underwater Things (IoUTs)

 , , , and
, , , and
Abstract
:1. Introduction
- ■
- We presented the ROBINA for inter-node modifications in all possible directions following path rotations until all nodes are designated for communication and are within the radius of the rotated path.
- ■
- We also analyzed the relay nodes quantity that is selected under the criteria of path rotation and adjusted its position by PA-ROBINA. It also uses the IAFN function and Parity bit-based flags to choose nodes that are closest to the destinations.
- ■
- We opted for and reformulated the ambient noise-reduction solution using the Urick’s Model for acoustic signals, and absorption loss factor by Thorp’s Formula, that modeled continuous Power Spectral Density (PSD) and Colored Gaussian Statistics (CGS). All these work for PL-ROBINA.
- ■
- We evaluated the first rotational orbit-based proposed scheme’s performance by comparing it with state-of-the-art benchmark schemes under different parameters of transmission loss, throughput, number of dead nodes, and etc.
2. Literature Review
3. Problem Formulations
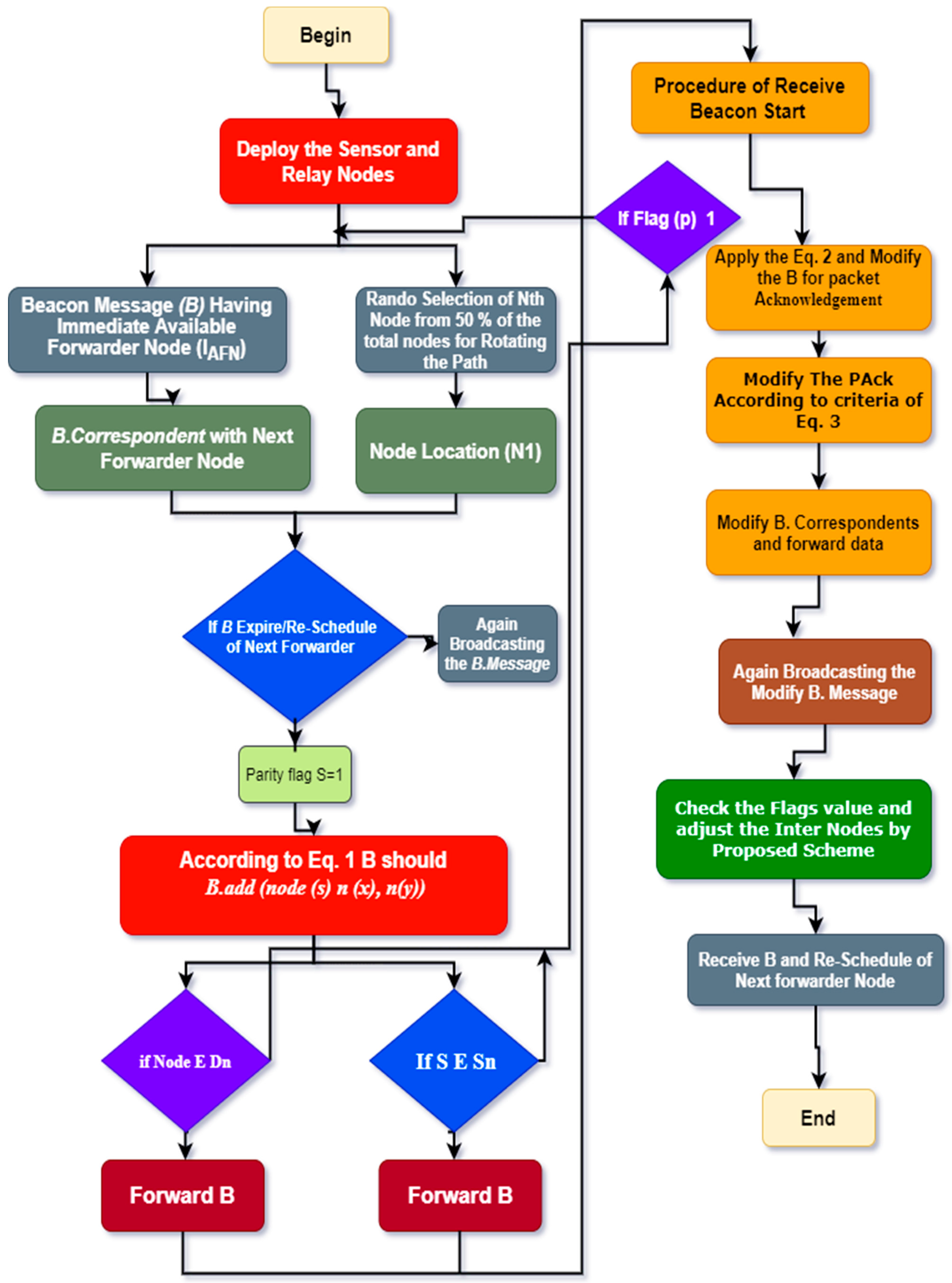
4. The Rotational Orbit Based Inter Node Adjustment (ROBINA)
5. Description of Algorithms 1 and 2
| Algorithm 1: The ROBINA. |
| B: Beacon message having next node Dn: Set of Dead Nodes S: Sonobuoys Sn: Set of Nodes Parity Flag Values: 0 and 1 (Used to Check Void Nodes) X. Y. Z: Coordinates of nodes Adj Ni: Adjacent Nodes Procedure FORWARD BEACON (Sonobuoys (Sn), Node) If B expires, then//Using B in Underwater is like ‘Hello Packet’ having the address of the next node B. correspondent Node location (Nl)//correspondent having all possible coordinates of Nodes if node Dn then//check for dead nodes for S n node, do if parity flag (s) = 1 then B.add (node (s) n (x), n(y)) A (AdjNi) = //adjacency nodes are decided using Equation (1). Flag (p) 0//Receive Partiy Value end if end for end if Forward B End if End Procedure Procedure RECEIVE BEACON (Node, B) If B Sn Modify B. correspondent then For = //using Equation (2) PACK = A (AdjNi) ∗ SNNs Else Modify PACK (N) = //using Equation (3) if Receive B end if End For End IF End Procedure |
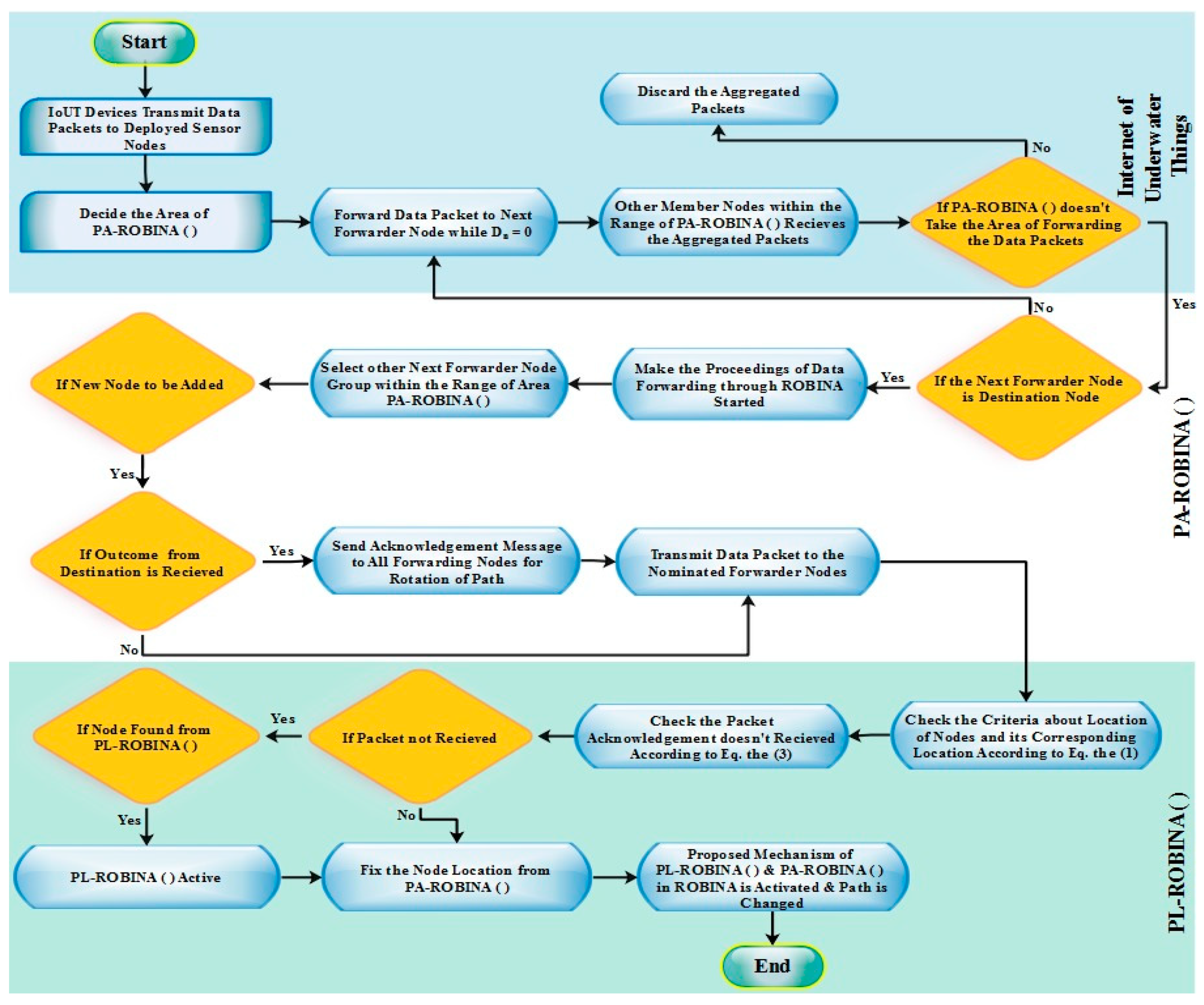
| Algorithm 2: Data Delivery Using PA-ROBINA. |
| B: Beacon message having next node Dn: Number of Dead Nodes Sn: Set of Nodes Ns: Set of Neighboring nodes Adj Ni: Adjacent Nodes Procedure Area of Path Adjustment (A) IF |Dn| = 0 then Forward data packets () Else Dn takes the next forwarder node (n) If |Dn| = 0 then for A (AdjNi) = Ns − Dn do Forward data Else Re-schedule of next forwarder node Proposed_scheme () end if end for End IF End Procedure |
6. Path Loss Channel Model
- (1)
- Pij,n shows the power transmission between two nodes.
- (2)
- N(fi) is the noise power spectral density.
- (3)
- ‘Bs’ denotes bandwidth on the receiver side.
7. Simulation Parameters
7.1. Performing Assessment
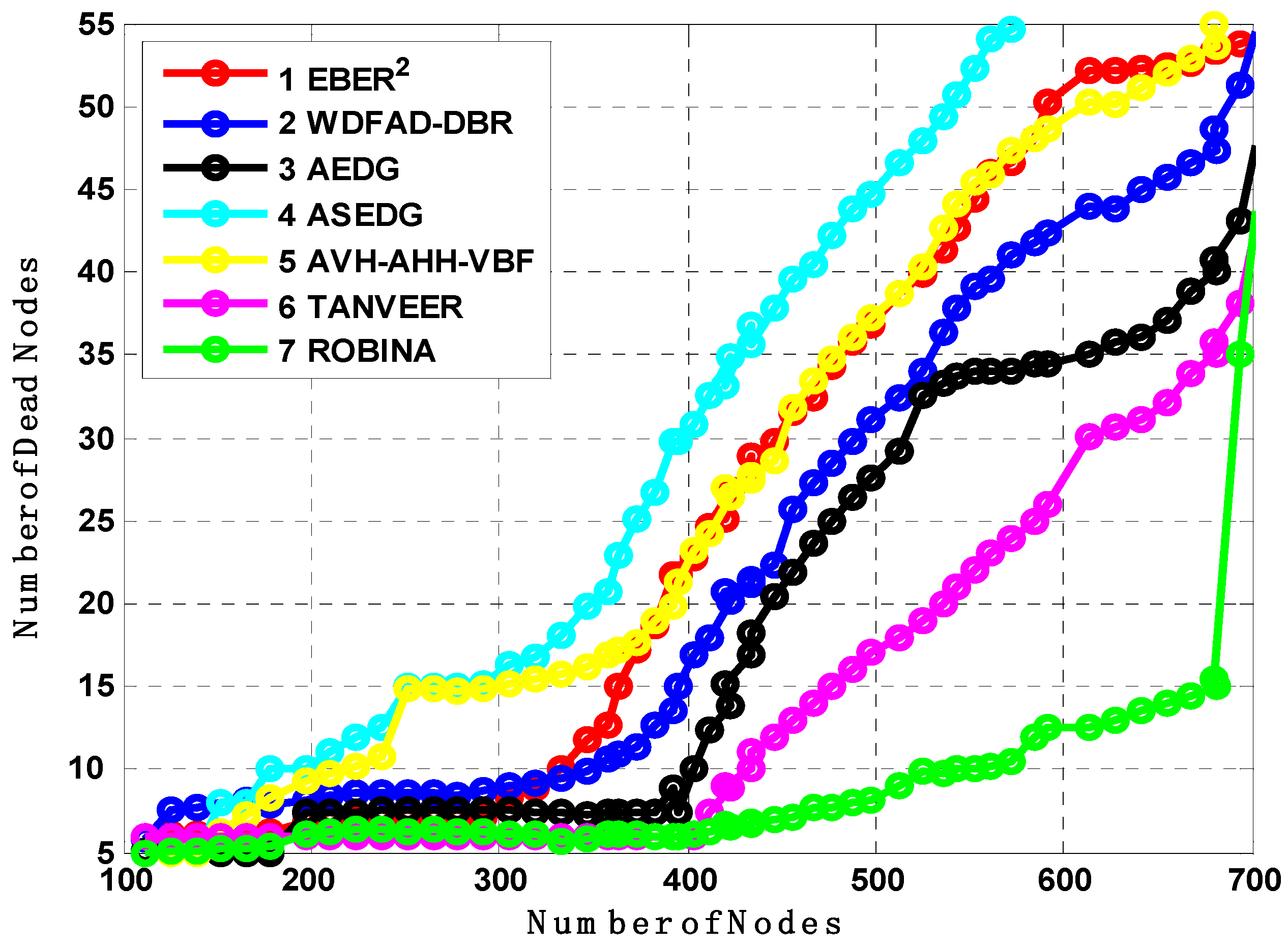
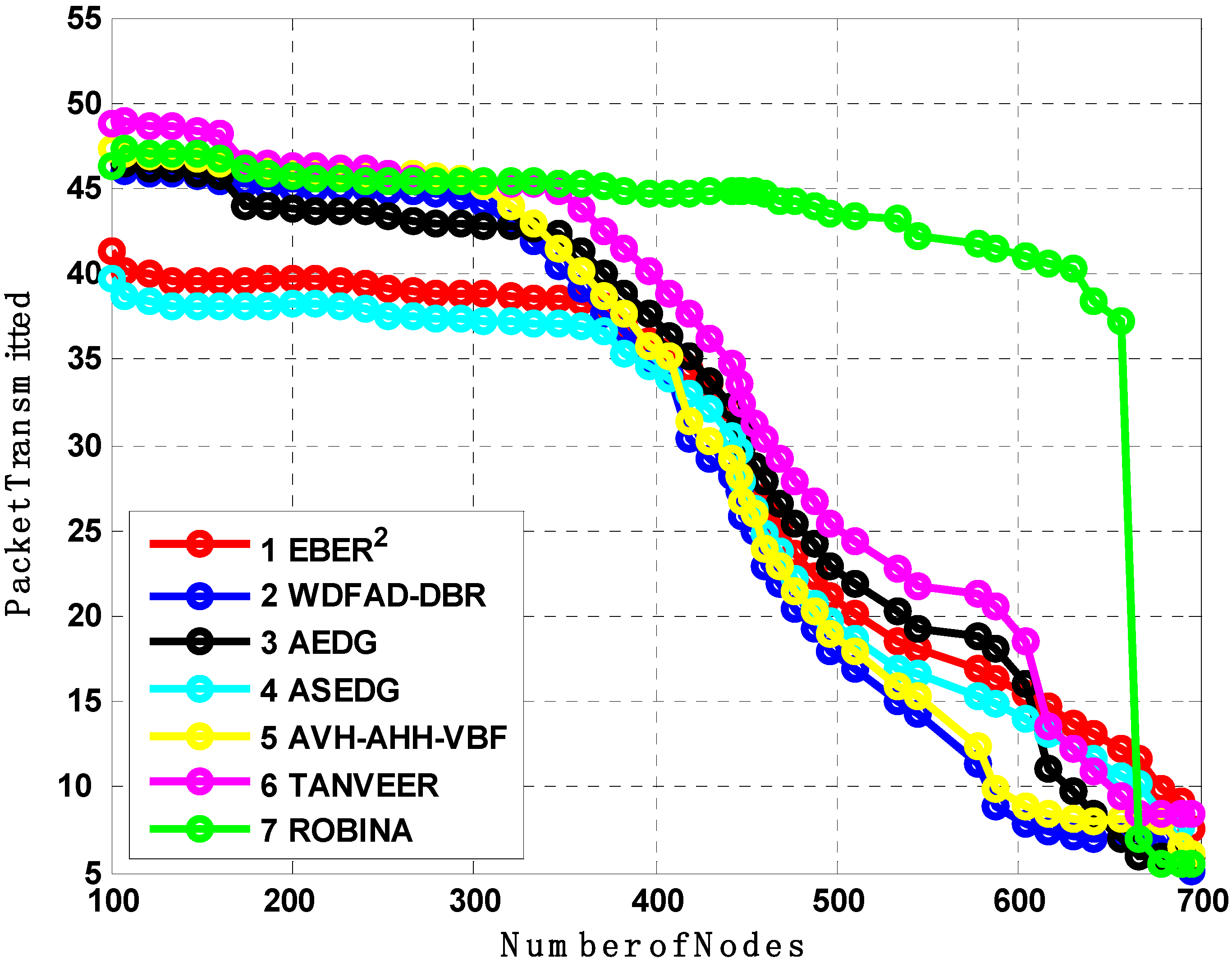
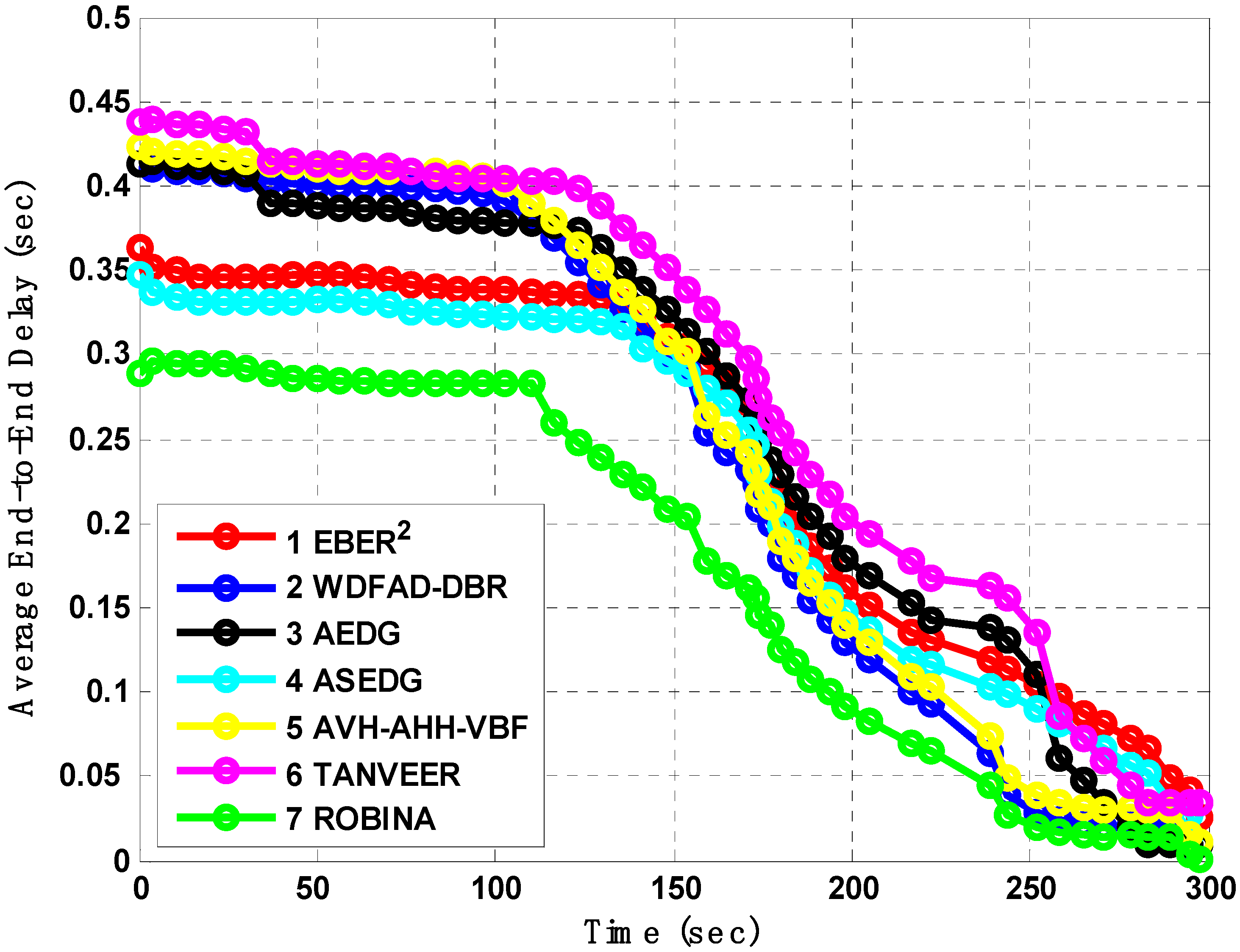
7.2. Analysis of Number of Dead Nodes, Packet Transmitted, and Average End to End Delays
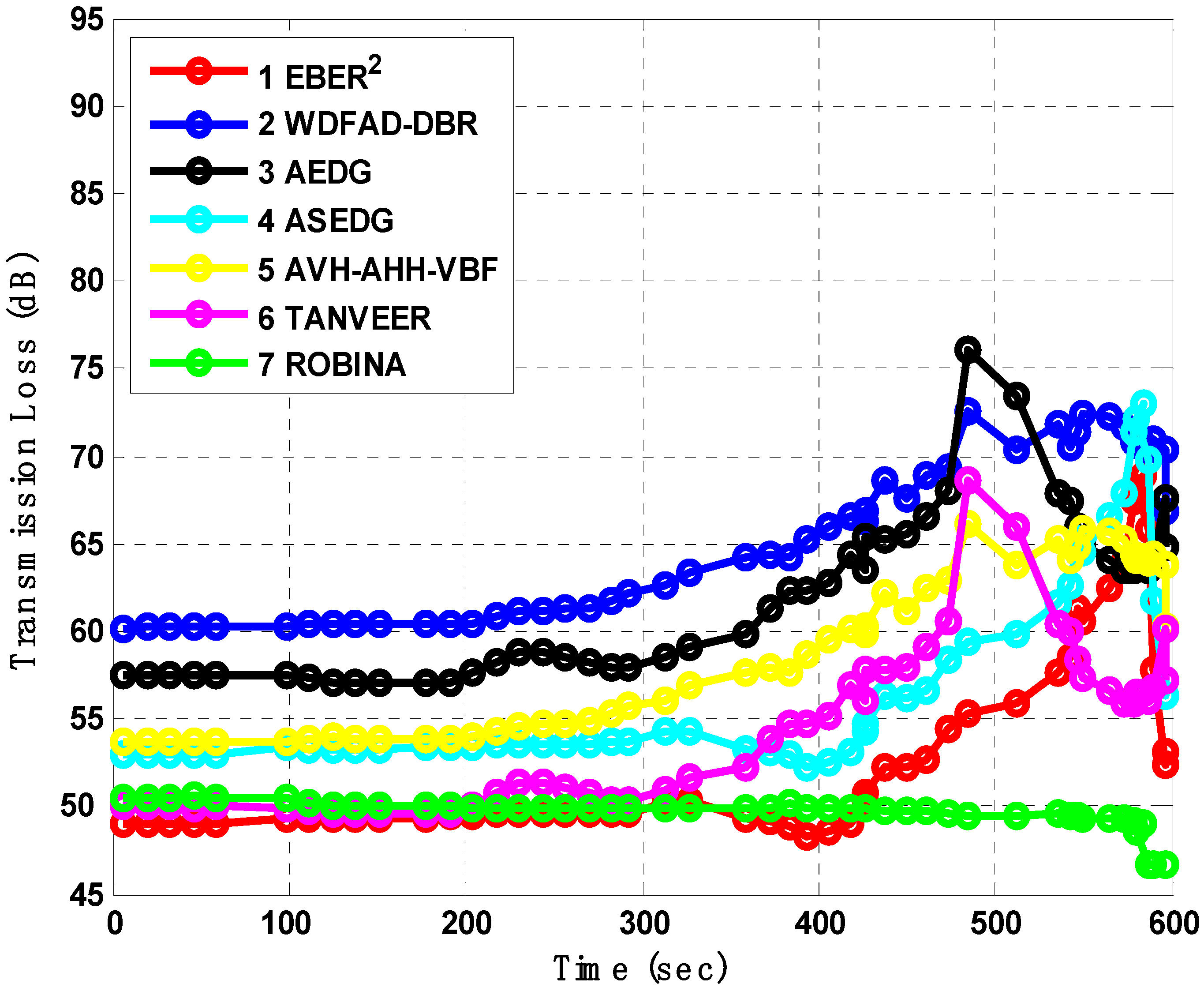
7.3. Analysis of Transmission Loss
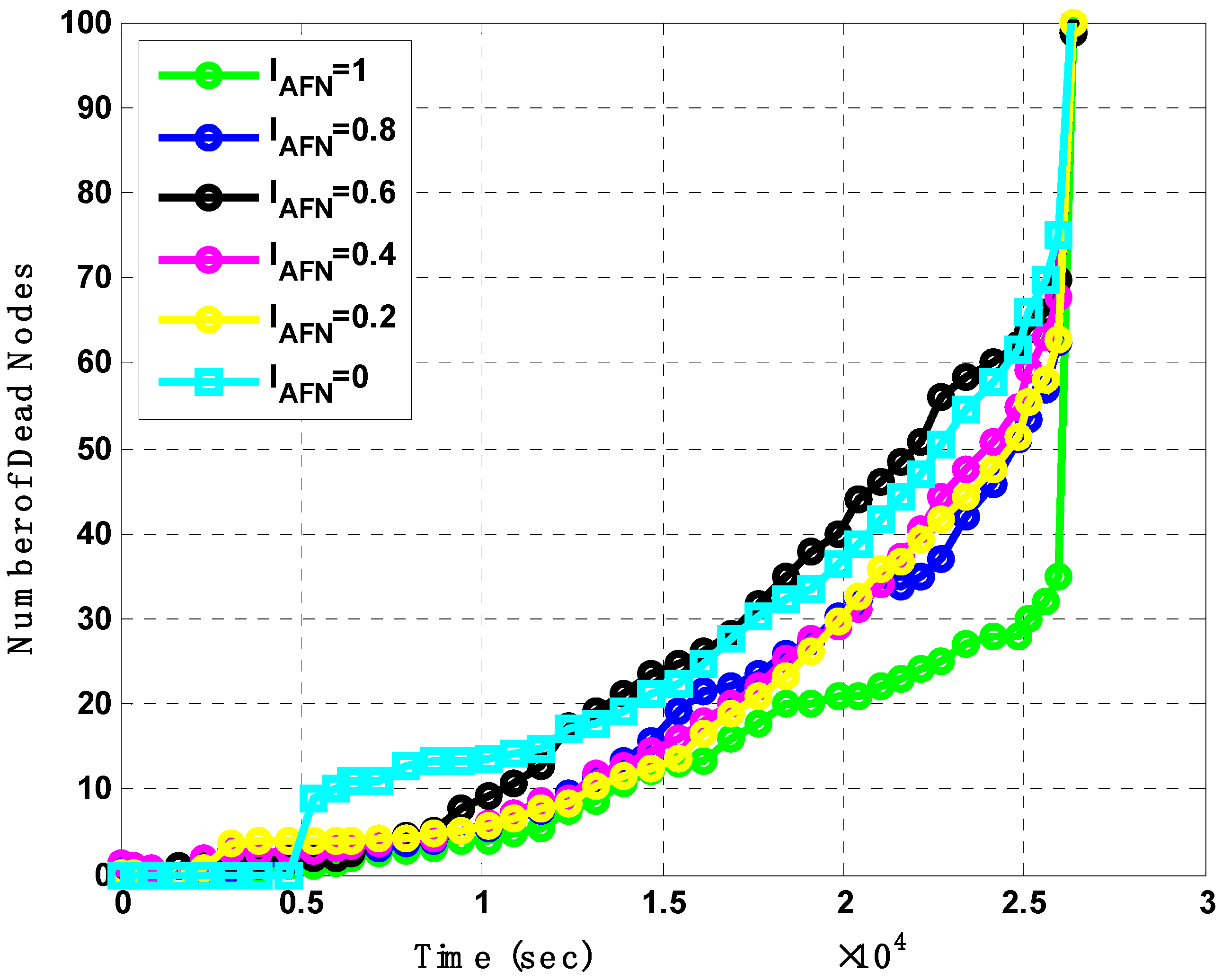
7.4. Impact of Immediate Available Forward Nodes (IAFN)
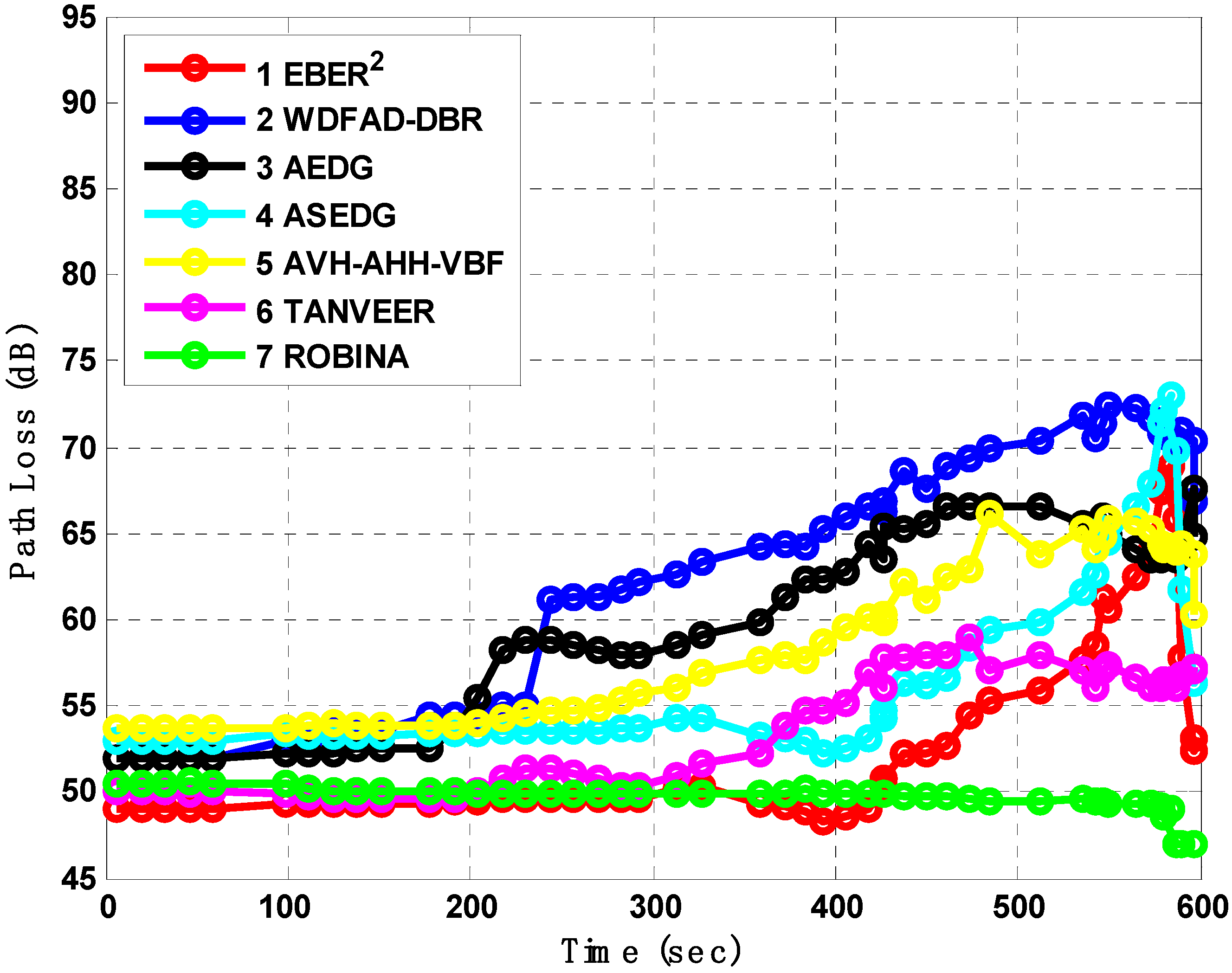
7.5. Analysis of Path Loss
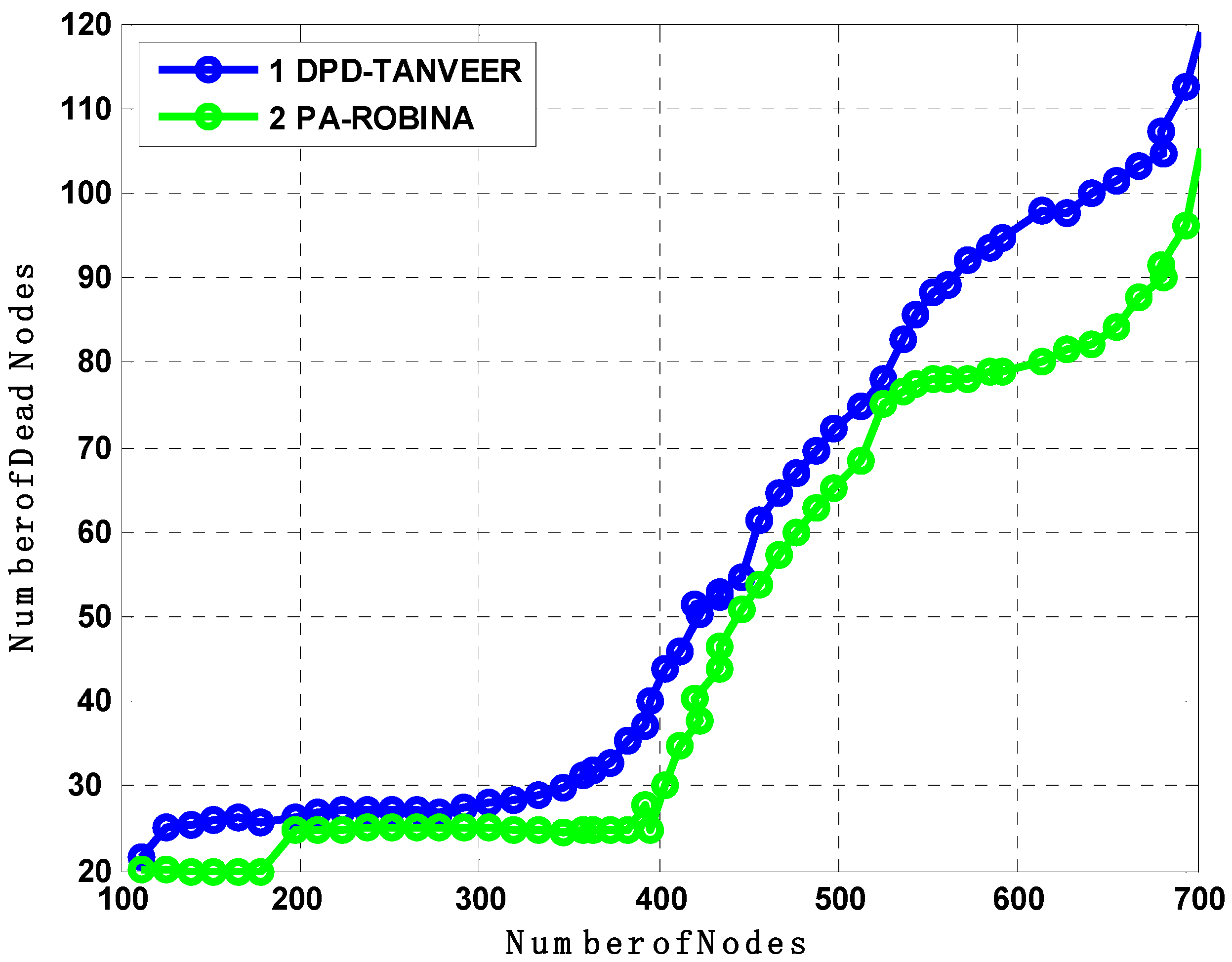
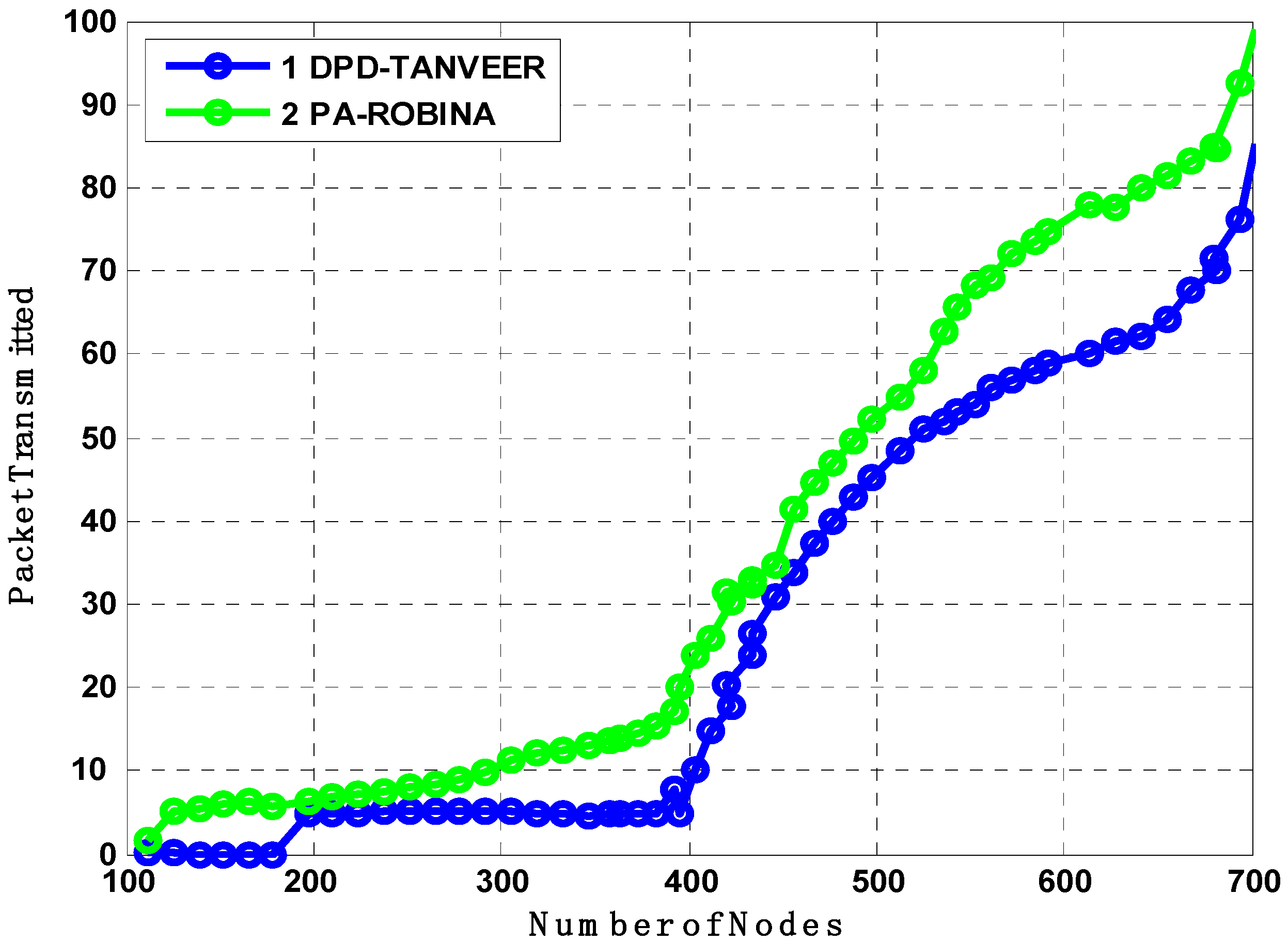
7.6. Analysis of DPD-TANVEER and PA-ROBINA with Number of Dead Nodes and Packet Transmitted
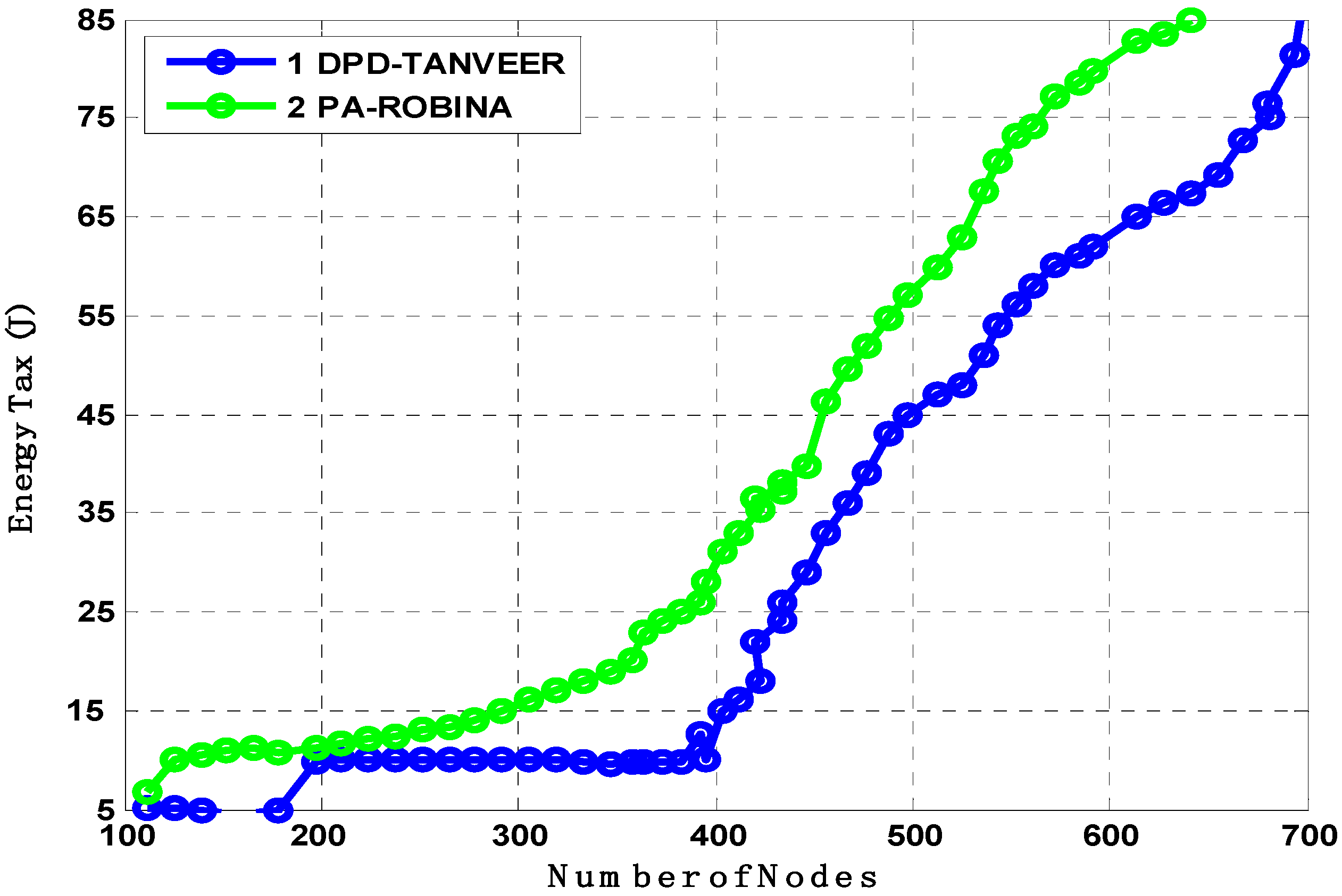
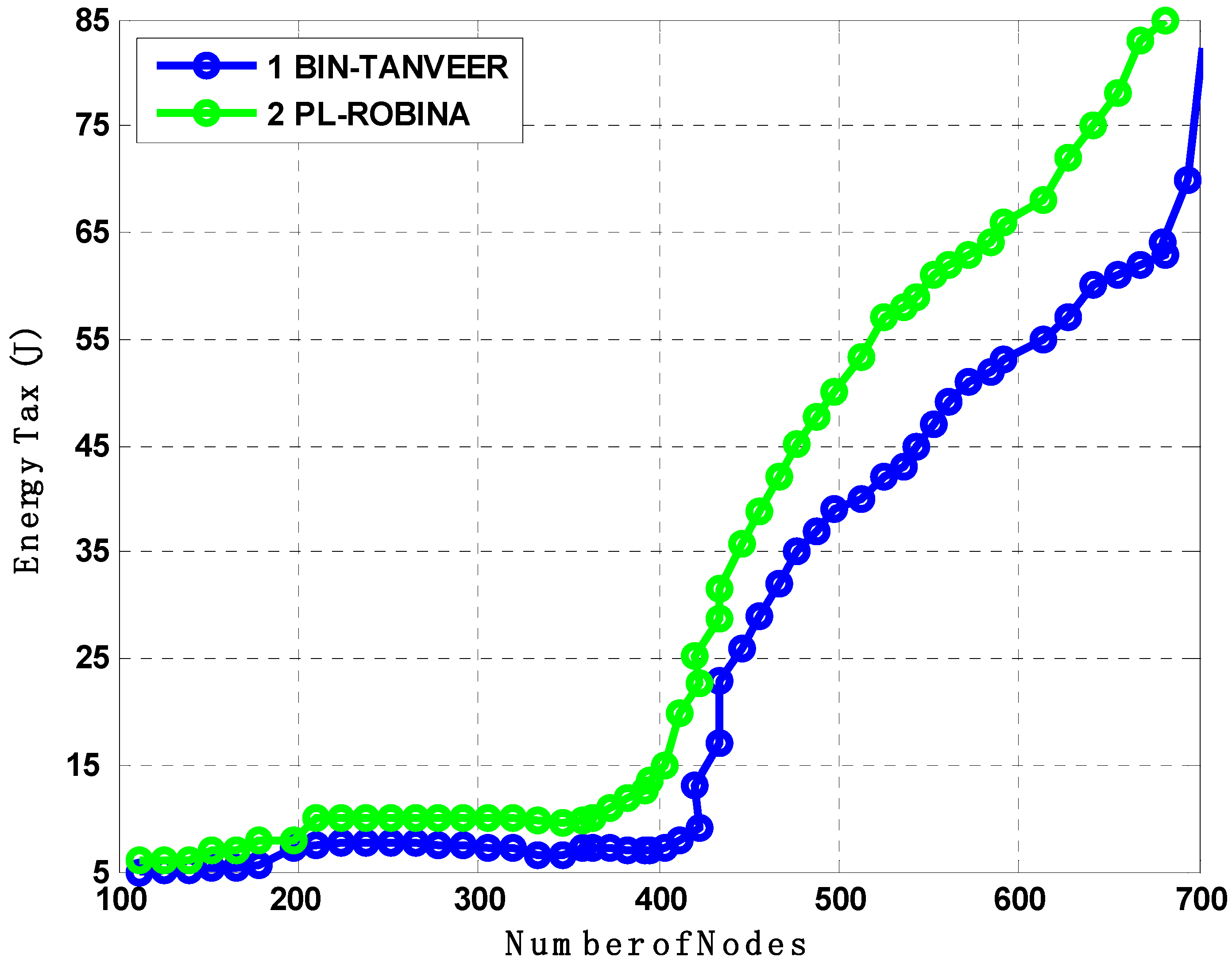
7.7. Analysis of DPD-TANVEER and PA-ROBINA with Energy Tax
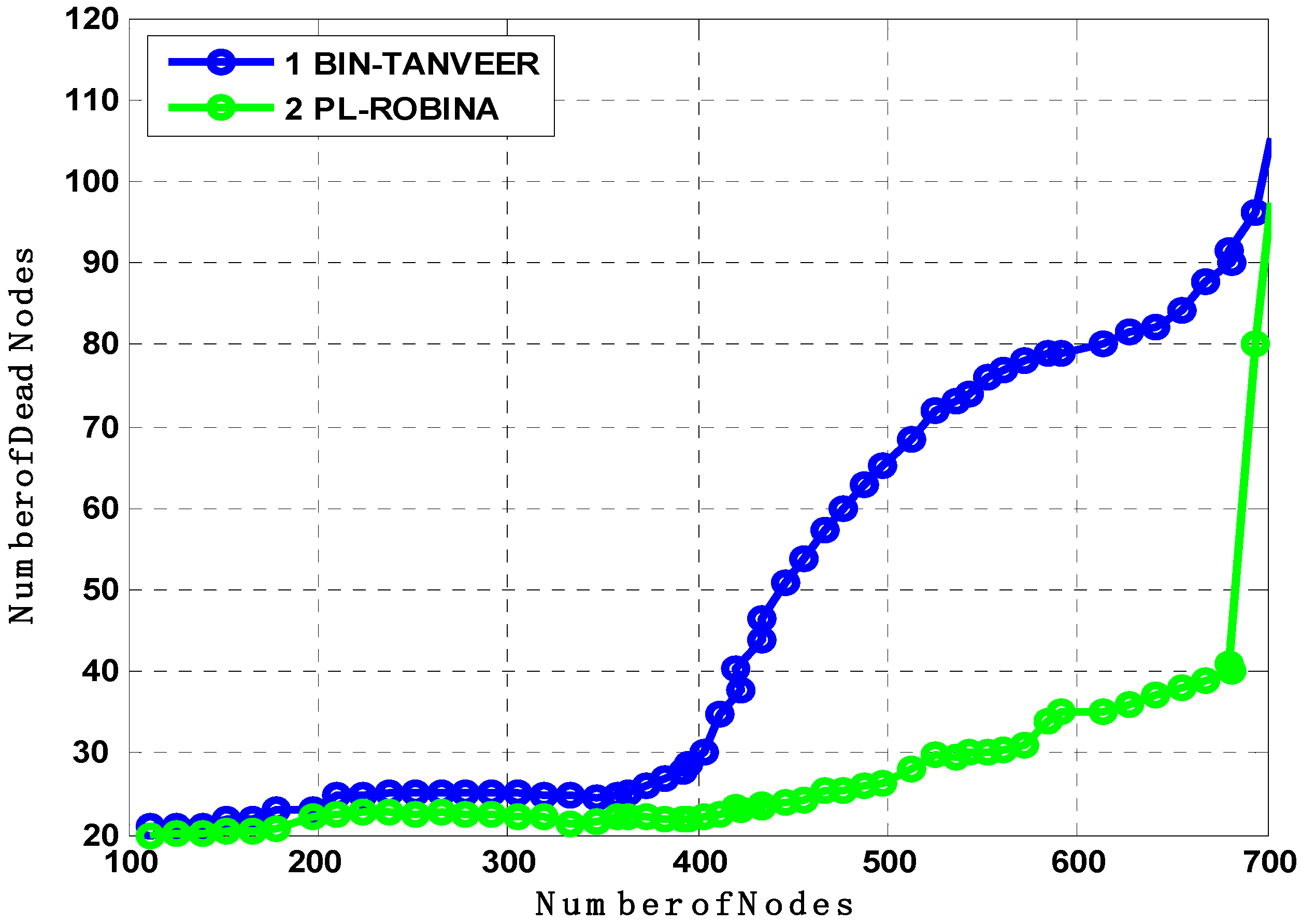
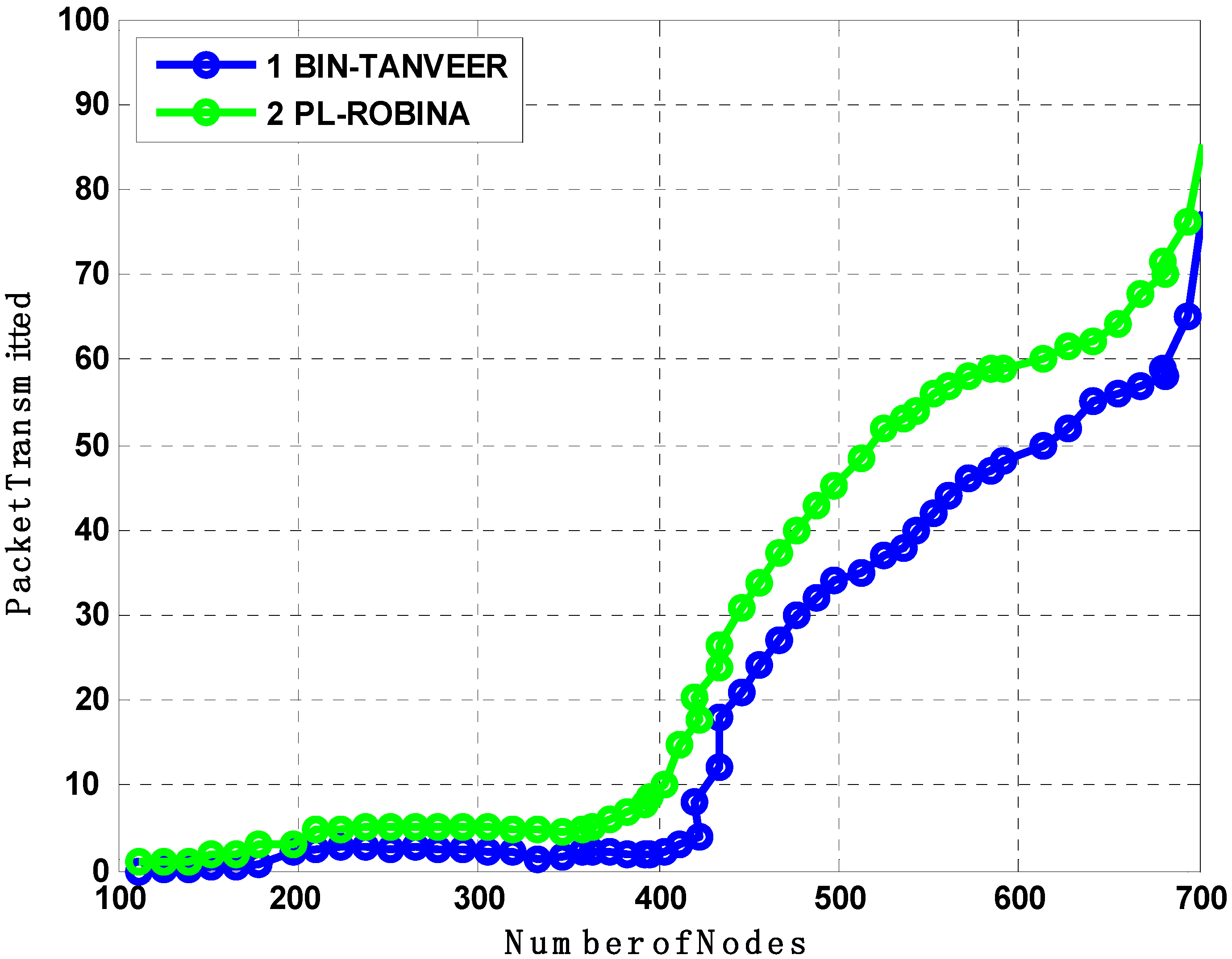
7.8. Analysis of BIN-TANVEER and PL-ROBINA with Number of Dead Nodes and Packet Transmitted
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jamali, M.V.; Chizari, A.; Salehi, J.A. Performance analysis of multi-hop underwater wireless optical communication systems. IEEE Photonics Technol. Lett. 2017, 29, 462–465. [Google Scholar] [CrossRef]
- Boucouvalas, A.C.; Peppas, K.P.; Yiannopoulos, K.; Ghassemlooy, Z. Underwater optical wireless communications with optical amplification and spatial diversity. IEEE Photonics Technol. Lett. 2016, 28, 2613–2616. [Google Scholar] [CrossRef]
- Xiao, L.; Sheng, G.; Wan, X.; Su, W.; Cheng, P. Learning-based PHY-layer authentication for underwater sensor networks. IEEE Commun. Lett. 2018, 23, 60–63. [Google Scholar] [CrossRef]
- Yan, J.; Tian, X.; Luo, X.; Guan, X. Design of an Embedded Communication System for Underwater Asynchronous Localization. IEEE Embed. Syst. Lett. 2019, 11, 97–100. [Google Scholar] [CrossRef]
- Zhao, R.; Li, N.; Dobre, O.A.; Shen, X. CITP: Collision and Interruption Tolerant Protocol for Underwater Acoustic Sensor Networks. IEEE Commun. Lett. 2020, 24, 1328–1332. [Google Scholar] [CrossRef]
- Li, S.; Qu, W.; Liu, C.; Qiu, T.; Zhao, Z. Survey on high reliability wireless communication for underwater sensor networks. J. Netw. Comput. Appl. 2019, 148, 102446. [Google Scholar] [CrossRef]
- John, S.; Menon, V.G.; Nayyar, A. Simulation-Based Performance Analysis of Location-Based Opportunistic Routing Protocols in Underwater Sensor Networks Having Communication Voids. In Data Management, Analytics and Innovation; Springer: Singapore, 2020; pp. 697–711. [Google Scholar]
- Latif, K.; Javaid, N.; Ullah, I.; Kaleem, Z.; Abbas, Z.; Nguyen, L.D. DIEER: Delay-Intolerant Energy-Efficient Routing with Sink Mobility in Underwater Wireless Sensor Networks. Sensors 2020, 20, 3467. [Google Scholar] [CrossRef] [PubMed]
- Hussain, T.; Rehman, Z.U.; Iqbal, A.; Saeed, K.; Ali, I. Two hop verification for avoiding void hole in underwater wireless sensor network using SM-AHH-VBF and AVH-AHH-VBF routing protocols. Trans. Emerg. Telecommun. Technol. 2020, 31, e3992. [Google Scholar] [CrossRef]
- Wadud, Z.; Ismail, M.; Qazi, A.B.; Khan, F.A.; Derhab, A.; Ahmad, I.; Ahmad, A.M. An Energy Balanced Efficient and Reliable Routing Protocol for Underwater Wireless Sensor Networks. IEEE Access 2019, 7, 175980–175999. [Google Scholar] [CrossRef]
- Farooq, W.; Ali, T.; Shaf, A.; UMAR, M.; Yasin, S. Atomic-shaped efficient delay and data gathering routing protocol for underwater wireless sensor networks. Turk. J. Electr. Eng. Comput. Sci. 2019, 27, 3454–3469. [Google Scholar] [CrossRef] [Green Version]
- Draz, M.U.; Ali, T.; Yasin, S.; Waqas, U. Towards formal modeling of hotspot issue by watch-man nodes in wireless sensor and actor network. In Proceedings of the IEEE 2018 International Conference on Frontiers of Information Technology (FIT), Islamabad, Pakistan, 17–19 December 2018; pp. 321–326. [Google Scholar]
- Ilyas, N.; Alghamdi, T.A.; Farooq, M.N.; Mehboob, B.; Sadiq, A.H.; Qasim, U.; Javaid, N. AEDG: AUV-aided Efficient Data Gathering Routing Protocol for Underwater Wireless Sensor Networks. In Proceedings of the ANT/SEIT, London, UK, 2–5 January 2015; pp. 568–575. [Google Scholar]
- Wang, H.; Zhang, X.; Khokhar, A. Efficient ”void” handling in contention-based geographic routing for wireless sensor networks. In Proceedings of the IEEE GLOBECOM 2007-IEEE Global Telecommunications Conference 2007, Washington, DC, USA, 26–30 November 2007; pp. 663–667. [Google Scholar]
- Yu, H.; Yao, N.; Wang, T.; Li, G.; Gao, Z.; Tan, G. WDFAD-DBR: Weighting depth and forwarding area division DBR routing protocol for UASNs. Ad Hoc Netw. 2016, 37, 256–282. [Google Scholar] [CrossRef]
- Ozawa, M. Position measuring interactions and the Heisenberg uncertainty principle. Phys. Lett. A 2002, 299, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Derevenskii, V.P. Matrix Bernoulli Equations. I. Russ. Math. 2008, 52, 12–21. [Google Scholar] [CrossRef]
- Sher, A.; Khan, A.; Javaid, N.; Ahmed, S.H.; Aalsalem, M.Y.; Khan, W.Z. Void hole avoidance for reliable data delivery in IoT enabled underwater wireless sensor networks. Sensors 2018, 18, 3271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahmed, F.; Gul, S.; Khalil, M.A.; Sher, A.; Khan, Z.A.; Qasim, U.; Javed, N. Two Hop Adaptive Routing Protocol for Underwater Wireless Sensor Networks. In Proceedings of the International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing, Torino, Italy, 10–12 July 2017; Springer: Cham, Switzerland, 2017; pp. 181–189. [Google Scholar]
- Zhang, X.M.; Wang, E.B.; Xia, J.J.; Sung, D.K. An estimated distance-based routing protocol for mobile ad hoc networks. IEEE Trans. Veh. Technol. 2011, 60, 3473–3484. [Google Scholar] [CrossRef]
- Gopi, S.; Govindan, K.; Chander, D.; Desai, U.B.; Merchant, S.N. E-PULRP: Energy optimized path unaware layered routing protocol for underwater sensor networks. IEEE Trans. Wirel. Commun. 2010, 9, 3391–3401. [Google Scholar] [CrossRef]
- Draz, U.; Yasin, S.; Irfan, M.; Ali, T.; Ali, A.; Glowacz, A.; Glowacz, W. TANVEER: Tri-Angular Nearest Vector-Based Energy Efficient Routing for IoT-Enabled Acoustic Sensor and Actor Networks (I-ASANs). Sensors 2021, 21, 3578. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A. Stochastic Modeling of Opportunistic Routing in Multi-Modal Internet of Underwater Things. In Proceedings of the GLOBECOM 2020-2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Chandavarkar, B.R.; Gadagkar, A.V. Expectation-Based Multi-Attribute Multi-Hop Routing (EM 2 R) in Underwater Acoustic Sensor Networks. In Proceedings of the 2020 IEEE 15th International Conference on Industrial and Information Systems (ICIIS), Rupnagar, India, 26–28 November 2020; pp. 555–560. [Google Scholar]
- Draz, U.; Ali, T.; Ahmad Zafar, N.; Saeed Alwadie, A.; Irfan, M.; Yasin, S.; Khan Khattak, M.A. Energy efficient watchman-based flooding algorithm for IoT-enabled underwater wireless sensor and actor networks. ETRI J. 2021. Available online: https://onlinelibrary.wiley.com/doi/full/10.4218/etrij.2019-0591 (accessed on 10 July 2021). [CrossRef]
- Al-Salti, F.; Alzeidi, N.; Day, K. Localization Schemes for Underwater Wireless Sensor Networks: Survey. Int. J. Comput. Netw. Commun. 2020, 12, 113–130. [Google Scholar] [CrossRef]
- Alasarpanahi, H.; Ayatollahitafti, V.; Gandomi, A. Energy-efficient void avoidance geographic routing protocol for underwater sensor networks. Int. J. Commun. Syst. 2020, 33, e4218. [Google Scholar] [CrossRef]
- Gola, K.K.; Gupta, B. Underwater acoustic sensor networks: An energy efficient and void avoidance routing based on grey wolf optimization algorithm. Arab. J. Sci. Eng. 2021, 46, 3939–3954. [Google Scholar] [CrossRef]
- Draz, U.; Ali, T.; Yasin, S.; Naseer, N.; Waqas, U. A parametric performance evaluation of SMDBRP and AEDGRP routing protocols in underwater wireless sensor network for data transmission. In Proceedings of the IEEE 2018 International Conference on Advancements in Computational Sciences (ICACS), Lahore, Pakistan, 19–21 February 2018; pp. 1–8. [Google Scholar]
- Halakarnimath, B.S.; Sutagundar, A.V. Reinforcement Learning-Based Routing in Underwater Acoustic Sensor Networks. Wirel. Pers. Commun. 2021, 120, 419–446. [Google Scholar] [CrossRef]
- El-Banna, A.A.A.; Wu, K. Introduction to Underwater Communication and IoUT Networks. In Machine Learning Modeling for IoUT Networks; Springer: Cham, Swirzerland, 2021; pp. 1–8. [Google Scholar]
- Ali, T.; Yasin, S.; Draz, U.; Ayaz, M. Towards formal modeling of subnet based hotspot algorithm in wireless sensor networks. Wirel. Pers. Commun. 2019, 107, 1573–1606. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A. OMUS: Efficient Opportunistic Routing in Multi-Modal Underwater Sensor Networks. IEEE Trans. Wirel. Commun. 2021. [Google Scholar] [CrossRef]
- Jan, S.; Yafi, E.; Hafeez, A.; Khatana, H.W.; Hussain, S.; Akhtar, R.; Wadud, Z. Investigating Master–Slave Architecture for Underwater Wireless Sensor Network. Sensors 2021, 21, 3000. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Le, T.T.; Nguyen, H.H.; Voznak, M. Energy-efficient clustering multi-hop routing protocol in a UWSN. Sensors 2021, 21, 627. [Google Scholar] [CrossRef]
- Draz, U.; Ali, T.; Yasin, S. Cloud Based Watchman Inlets for Flood Recovery System Using Wireless Sensor and Actor Networks. In Proceedings of the 2018 IEEE 21st International Multi-Topic Conference (INMIC), Karachi, Pakistan, 1–2 November 2018; pp. 1–6. [Google Scholar]
- Zhao, D.; Lun, G.; Xue, R.; Sun, Y. Cross-Layer-Aided Opportunistic Routing for Sparse Underwater Wireless Sensor Networks. Sensors 2021, 21, 3205. [Google Scholar] [CrossRef]
- Ashraf, S.; Ahmed, T.; Raza, A.; Naeem, H. Design of shrewd underwater routing synergy using porous energy shells. Smart Cities 2020, 3, 74–92. [Google Scholar] [CrossRef] [Green Version]
- Draz, U.; Yasin, S.; Ali, A.; Khan, M.A.; Nawaz, A. Traffic Agents-Based Analysis of Hotspot Effect in IoT-Enabled Wireless Sensor Network. In Proceedings of the IEEE 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 14–18 January 2021; pp. 1029–1034. [Google Scholar]
- Luo, J.; Chen, Y.; Wu, M.; Yang, Y. A Survey of Routing Protocols for Underwater Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2021, 23, 137–160. [Google Scholar] [CrossRef]
- Aysal, T.C.; Barner, K.E. Sensor data cryptography in wireless sensor networks. IEEE Trans. Inf. Forensics Secur. 2008, 3, 273–289. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Trujillo, J.J.; Martynyuk, V.I.; Coito, F.J. A generalized power series and its application in the inversion of transfer functions. Signal Process. 2015, 107, 238–245. [Google Scholar] [CrossRef]
- Mahmutoglu, Y.; Turk, K.; Tugcu, E. Particle swarm optimization algorithm based decision feedback equalizer for underwater acoustic communication. In Proceedings of the IEEE 2016 39th International Conference on Telecommunications and Signal Processing (TSP), Vienna, Austria, 27–29 June 2016; pp. 153–156. [Google Scholar]
- Zhang, J.; Cao, Y.; Han, G.; Fu, X. Deep neural network-based underwater OFDM receiver. IET Commun. 2019, 13, 1998–2002. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, W.; Sun, X.; Wan, L.; Tao, Y.; Xu, X. Environment-aware communication channel quality prediction for underwater acoustic transmissions: A machine learning method. Appl. Acoust. 2021, 181, 108128. [Google Scholar] [CrossRef]
- Su, Y.; Liwang, M.; Gao, Z.; Huang, L.; Du, X.; Guizani, M. Optimal cooperative relaying and power control for IoUT networks with reinforcement learning. IEEE Internet Things J. 2020, 8, 791–801. [Google Scholar] [CrossRef]
- Jin, Z.; Zhao, Q.; Su, Y. RCAR: A reinforcement-learning-based routing protocol for congestion-avoided underwater acoustic sensor networks. IEEE Sens. J. 2019, 19, 10881–10891. [Google Scholar] [CrossRef]
- Su, Y.; Fan, R.; Fu, X.; Jin, Z. DQELR: An adaptive deep Q-network-based energy-and latency-aware routing protocol design for underwater acoustic sensor networks. IEEE Access 2019, 7, 9091–9104. [Google Scholar] [CrossRef]
- Alamgir, M.S.M.; Sultana, M.N.; Chang, K. Link adaptation on an underwater communications network using machine learning algorithms: Boosted regression tree approach. IEEE Access 2020, 8, 73957–73971. [Google Scholar] [CrossRef]
- Pabani, J.K.; Luque-Nieto, M.Á.; Hyder, W.; Otero, P. Energy-Efficient Packet Forwarding Scheme Based on Fuzzy Decision-Making in Underwater Sensor Networks. Sensors 2021, 21, 4368. [Google Scholar] [CrossRef]
- Shaf, A.; Ali, T.; Farooq, W.; Draz, U.; Yasin, S. Comparison of DBR and L2-ABF routing protocols in underwater wireless sensor network. In Proceedings of the IEEE 2018 15th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 14–18 January 2018; pp. 746–750. [Google Scholar]
- Ali, T.; Ayaz, M.; Jung, L.T.; Draz, U.; Shaf, A. Upward and diagonal data packet forwarding in underwater communication. ESTIRJ 2017, 1, 33–40. [Google Scholar]
- Draz, U.; Ali, T.; Asghar, K.; Yasin, S.; Sharif, Z.; Abbas, Q.; Aman, S. A Comprehensive Comparative Analysis of Two Novel Underwater Routing Protocols. IJACSA 2019, 10, 4. [Google Scholar] [CrossRef]
- Anum, A.; Ali, T.; Akbar, S.; Obaid, I.; Junaid, M.; Anjum, U.D.; Shaheen, M. Angle Adjustment for Vertical and Diagonal Communication in underwater Sensor Networks. IJACSA Int. J. Adv. Comput. Sci. Appl. 2020, 11, 604–616. [Google Scholar]
- Draz, U.; Ali, T.; Yasin, S.; Bukhari, S.; Khan, M.S.; Hamdi, M.; Ali, A. An Optimal Scheme for UWSAN of Hotspots Issue Based on Energy-Efficient Novel Watchman Nodes. Wirel. Pers. Commun. 2021, 1–26. [Google Scholar] [CrossRef]
- Draz, U.; Ali, T.; Yasin, S.; Fareed, A.; Shahbaz, M. Watchman-based data packet forwarding algorithm for underwater wireless sensor and actor networks. In Proceedings of the IEEE 2019 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Swat, Pakistan, 24–25 July 2019; pp. 1–7. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Description |
|---|---|
| Selop | Selection operator |
| B | Beacon message |
| Dn | Number of dead nodes |
| SNN | Sink neighboring nodes |
| Ns | Set of neighboring nodes |
| Sn | Set of nodes |
| PACK | Packer acknowledgment |
| AdjNi | Adjacency of node |
| Node location (Nl) | Node location |
| E(Ni) | Energy of node |
| SNN(range) | Range of sink neighboring nodes |
| Simulation Parameters | Values |
|---|---|
| Number of nodes | 700 |
| Network Range | 1600 × 1000 × 1000 |
| Initial energy | 100 j |
| Acoustic Network Speed | 1500 m/s |
| Transmission range | 200 m |
| Receiving | 0.8 W |
| Data packet size | 50 B |
| Beacon message size | 52 B |
| Data Rates | 10 kbps |
| Network Simulator with AquaSim | NS-2.35 |
| Schemes | Features | Achieved Parameters | Trade-Offs |
|---|---|---|---|
| ROBINA | First time introduce the path rotation idea with path loss and adjustment variants in the acoustic environment. | Avoidance of path loss and increased the reliability of energy-efficient routing that supports IoT-based dynamic devices. | The maximum probability of path rotation and internodes adjustment is achieved with affordable AE2ED |
| PA-ROBINA | Adjustment is easy, avoidance of void hole is minimal, and rotatable in a dynamic environment | Path adjustment is performed against different distances and cross-checks for IAFN. PA-ROBINA has more satisfactory results then DPD-TANVEER | Observed good results when compared with similar approach DPD-TANVEER and average results with rest of the schemes |
| PL-ROBINA | Using Urick’s Model ad Colored Gaussian Surface with Throp’s Formula, the PL-ROBINA is established between two nodes and remains true for all other nodes with reference to ‘Tylor and Maclaren Series’. | From Figure 12, path loss analysis had good results and easily experiment with the medium to large scale networks even 700 nodes | This scheme is only supported when taking the assumptions of mathematical models; otherwise, it is needed to try with small networks |
| TANVEER [22] | Geographic and opportunistic routing scheme using three-angle adjustment and watchman-based transmission | Increased PDR and throughput of the network by bypass the empty nodes/regions | Observed high end-to-end delay due to three-time angle calculation |
| LBA- TANVEER [22] | Layer-based adjustment with data collision avoidance mechanism | Improved network topology and performance with adjustment of nodes | Due to the dynamic nature of the environment but accurate void nodes are feasible |
| DPD- TANVEER [22] | Using the TANVEER approach with avoiding empty regions | Improved PDR, throughput, and a fraction of empty regions | Same as TANVEER |
| BIN- TANVEER [22] | Works with Binary internodes that rescue the data transmission | Improved PDR and try to decrease PLR | Energy consumption is high |
| EBER2 [14] | deliberates enduring energy along with the number of PFN transmission choices duplication of packets, residual energy | balance energy and achieve reliability | The protocol allows forwarders to adaptively control their communication according to the utmost node in the neighbor list of the network only |
| AEDG [13] | AEDG and ASEDG both introduce the atomic shape path for relay nodes and sinks, but it is not rotational | need to design such a routing path that is not only shortest in length but also covers realistic parameters like energy tax, AE2ED | The atomic path is not as much rotated to cover the case; the average results are shown in Figure 10, Figure 11, Figure 12 and Figure 13, respectively |
| ASEDG [11] | AEDG and ASEDG both introduce the atomic shape path for relay nodes and sinks, but it is not rotational | routing path not only shortest in length but also cover the dead nodes, further using AUVs is not a smart approach, especially when the network is large | The atomic path is not as much rotate to cover the case [40]; the average results have shown in Figure 10, Figure 11, Figure 12 and Figure 13, respectively |
| WDFAD-DBR [15] | mechanism considers the depth of the next forwarding node through which it avoids void holes. | With DBR joined with this. Therefore this scheme is a benchmark, so it works well for rapid data delivery as compared with other schemes | Depth is not the solution in any case; the one using depth Division is considered a traditional approach that only fits when nodes are not far apart from each other |
| AVH-AHH-VBF [9] | schemes have been designed including hops mechanism, Vector-Based Forwarding | AHH-VBF protocol, each node uses dissimilar virtual pipes, and during each time of transmission direction of the virtual pipe change | SM-AHH-VBF, without this feature, the result has been affected |
| PSOA [43] | Decision feedback equalizer (DEF), ambient noise, Laplace noise, Raley Fading channel, and distribution for frequency selection in the acoustic environment is used | The computational complexity of LMS, RLS, and PSO are achieved | PSO has the highest computational complexity as compared with PSO-DEF |
| Underwater OFDM Reciver [44] | Design the simplifier receiver for the UWA channel due to deep neural network-based orthogonal frequent division multiplexing | Thus the signal is suitable for UWA and also for other similar schemes and channels due to better bit error over traditional ones | A general receiver that is already used for other modulation schemes, not fit for water currents, particularly when the water is deep and shallow |
| EACQ for Underwater [45] | Environment-aware communication channel quality prediction (ML-ECQP) method for UACNs is proposed | A logistic regression algorithm is used to predict the communication channel quality between the sender and receiver side | Highly energy waste caused transmission that reduces the packet transmission ratio |
| OCRPC for IoUTs [46] | Try to evaluate the optimal transfer power node for deleting of nodes to maximize the PDR and other relevant parameters, for example, Q-Network based underwater relay section as well as Q-learning approaches | Achieved equal transmit power under the same condition using Markov Model and reinforcement learning | Improve the communication strategy, but lots of iterations are needed to cover the maximum area |
| RCACR [47] | Same as used reinforcement learning mechanism as per [46], the only difference is that accelerating the convergence algorithm strategy is introduced for the first time in literature in underwater settings | Due to the reward function with reinforcement learning mechanism, results are easily satisfied in the MAC layer | Due to the proposed modified MAC layer in Underwater to optimal routing decision, the optimal RCACR pour performed HHVBF, DQELR, and GEADR in terms of convergence and energy |
| DQELR [48] | adaptive Deep Q-Network-based energy- and latency-aware routing protocol (DQELR) to increase the network lifetimes in Underwater | Achieved less limitation in latency and increased energy efficiency with superior network lifetime | The method of selecting Q-value is not optimized; it is proactive and does not fit in all scenarios that the case is covered |
| ML Algorithms for Underwater [49] | Adaptive modulation and coding mechanism is used for 3D trail data set for oceans | Boosted regression tree and four ML algorithms are good for channel characteristics | SNR and BER constraints are rich; especially signal characteristics are used |
| Fuzzy decision Making in Underwater [50] | Packet forwarding scheme using fuzzy logic is introduced, with RSSI indicator for adaptive and non-adaptive transmission | Several hops with fuzzy constraints are used that dynamically affect the performance of the underwater networks, especially energy tax | Hop count is an old parameter, but coins with fuzzy logics decision making structures are good to introduce acoustic communication |
| Miscellaneous Underwater Routing Schemes [51,52,53,54,55,56] | All are working for underwater scenarios to avoid and solve the void hole problems | Proposed atomic path, watchman-based nodes, optimal scheme, angle adjustment, diagonal and vertical routing ideas, and different comparative studies work well in this domain | All the routing schemes were well performed in and deployed in a network scenario with some trade-off’s relationships |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Draz, U.; Yasin, S.; Ali, T.; Ali, A.; Faheem, Z.B.; Zhang, N.; Jamal, M.H.; Suh, D.-Y. ROBINA: Rotational Orbit-Based Inter-Node Adjustment for Acoustic Routing Path in the Internet of Underwater Things (IoUTs). Sensors 2021, 21, 5968. https://doi.org/10.3390/s21175968
Draz U, Yasin S, Ali T, Ali A, Faheem ZB, Zhang N, Jamal MH, Suh D-Y. ROBINA: Rotational Orbit-Based Inter-Node Adjustment for Acoustic Routing Path in the Internet of Underwater Things (IoUTs). Sensors. 2021; 21(17):5968. https://doi.org/10.3390/s21175968
Chicago/Turabian StyleDraz, Umar, Sana Yasin, Tariq Ali, Amjad Ali, Zaid Bin Faheem, Ning Zhang, Muhammad Hasan Jamal, and Dong-Young Suh. 2021. "ROBINA: Rotational Orbit-Based Inter-Node Adjustment for Acoustic Routing Path in the Internet of Underwater Things (IoUTs)" Sensors 21, no. 17: 5968. https://doi.org/10.3390/s21175968