1. Introduction
Due to the primary appealing characteristics of high multiplexing capability, low price, small size, low noise interference, and remote sensing suitability, fiber Bragg grating (FBG) sensors are commonly used for strain, temperature, vibration, and other measurements [
1,
2,
3]. The strain sensing principle of the FBG sensor depends on the shift of the peak wavelength of each FBG due to the change in physical or environmental factors, such as strain, stress, temperature, vibration, pressure, and others [
4,
5,
6,
7,
8]. In a distributed sensor system, a number of FBG sensors can be multiplexed in the fiber cable using the wavelength division multiplexing (WDM) method. Thus, the distributed FBG sensor system can measure the conditions of different objects in different applications.
However, in a traditional WDM, a unique spectral operational region is assigned to each FBG sensor and the reflection spectra of contiguous FBGs sensors cannot be allowed to overlap. This extremely limits the numbers of FBG sensors in the sensor system. Recently, intensity wavelength division multiplexing (IWDM) techniques have been proposed to improve the multiplexing ability of the sensor system, where the reflection spectra of FBG sensors in the sensor system are allowed to overlap [
9]. Thus, IWDM is used to enhance the multiplexing capacity of the FBG sensor network and to enable the sensor system to contain more than twice as many FBGs as traditional WDM techniques [
9,
10,
11]. However, the overlapping spectra of FBG sensors can cause cross talk between the adjacent FBGs and can make it difficult for the traditional wavelength detection techniques to identify the sensing signal of each FBG sensor. Moreover, the FBG sensor system may be influenced by the harsh environment, which affects the shape of the reflection spectra and increases the wavelength detection errors [
12].
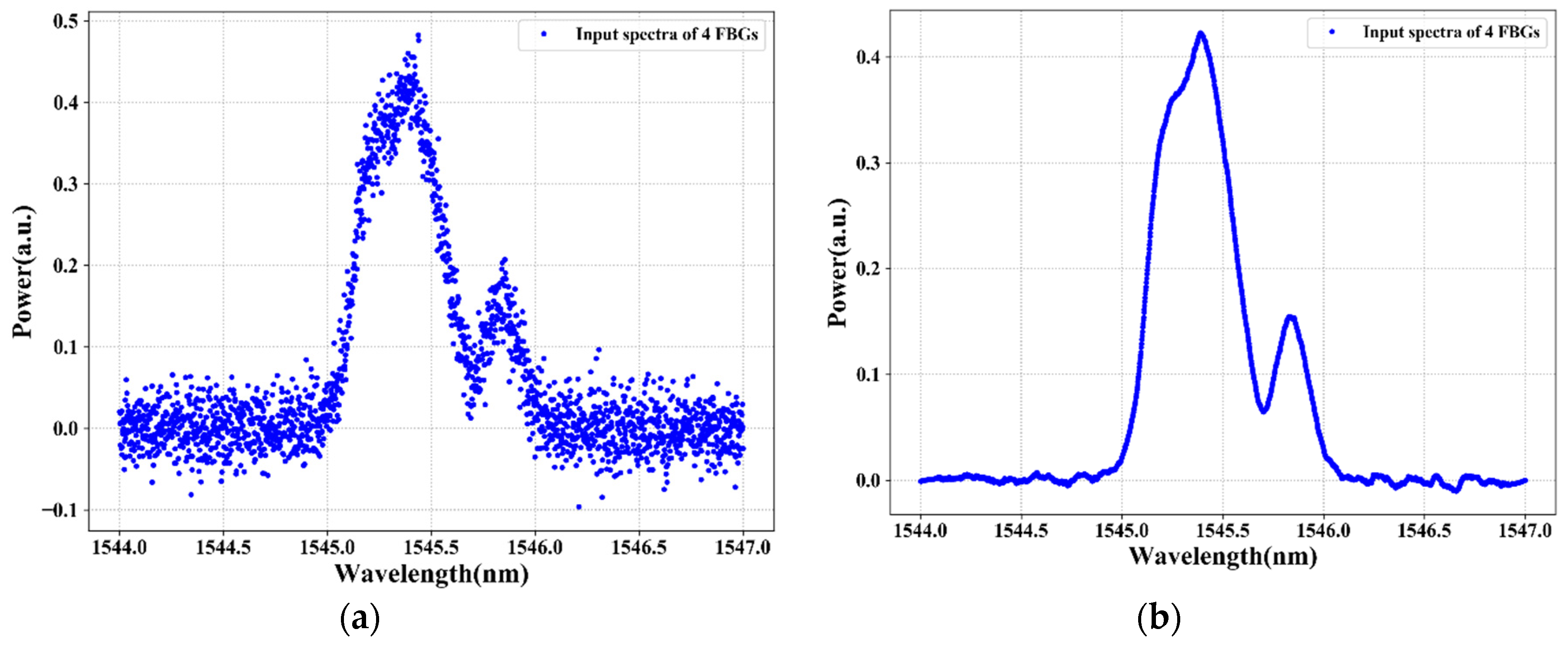
In real-world applications of sensor systems, the environment is noisy and FBG sensors are vulnerable to the rain and wind. Also, the insignificant vibration makes the spectra of FBG unsmooth, and several burrs occur over the spectrum of FBGs [
12,
13]. Thus, the noise can degrade the performance and reliability of the FBG sensor system, resulting in large sensing signal measurement errors. As a result, noises from the FBG signal must be filtered using de-noising methods before implementing the sensing signal measurement. Therefore, since the major task in the IWDM-based FBG sensor system is to accurately measure the sensing signals of each FBG sensor from the partially or fully overlapping spectra of FBGs, a correct choice of the interrogation system is critical for the FBG sensor.
Recently, several advanced wavelength detection methods have been proposed for measuring the sensing signal of FBGs from the overlapping spectra. Evolutionary algorithms (EA) are one typical type of method. Recently, several evolutionary algorithms (EA), such as the tree search dynamic multi-swarm particle swarm optimizer (TS-DMS-PSO) [
14], genetic algorithms (GA) [
15], and the dynamic multi-swarm particle swarm optimizer (DMS-PSO) [
16], have been used to enhance the sensing signal measurement accuracy. These EA methods have the ability to accurately detect each FBG’s sensing signal even when the spectra of adjacent sensors are partially overlapped. However, they suffer from a comparatively long processing time in large-structure sensor system.
In addition, there are several types of wavelength prediction algorithms, for example, centroid detection, direct-peak detection (DPD), nonlinear Gaussian fitting, and polynomial fitting [
17,
18], which are primarily designed to measure the reflection spectrum of a single FBG sensor. However, since, in IWDM-based FBG sensor networks, a number of FBG sensors are multiplexed and there is more than one peak in the reflection spectrum of FBGs, all of the above algorithms cannot work directly in the IWDM FBG sensor systems. Moreover, to improve both the sensing signal measurement accuracy and the speed, machine learning techniques such as extreme learning machine (ELM) and multilayer perceptron (MLP) have been proposed [
19,
20]. However, the ELM and MLP methods still have less accuracy in the measurements of the sensing signal and increase the time consumption due to the traditional machine learning algorithms having less learning capacity and inflexibility.
Overall, the conventional peak wavelength measurement algorithms listed above have numerous shortcomings, such as experimental noise, sensitivity to power fluctuations, and time consumption. Most recently, in complicated data analysis, deep learning is developing as an advanced machine learning technique. Unlike other traditional machine learning methods, deep learning consists of various hidden layers to learn the features of FBG spectra with various levels of interpretation. Deep learning algorithms can plot the training data to a nonlinear model with a best representation and fitting effect through the multiple hidden layers [
21,
22,
23].
In this paper, a long short-term memory (LSTM) deep learning algorithm integrated with data de-noising techniques is proposed to optimize the performance of IWDM-based multipoint FBG sensor system. LSTM, suggested by Reference [
24], is an architectural variation of a recurrent neural network (RNN) that is particularly appropriate for sequences of long input. We applied the LSTM algorithm to recognize and learn the features of the reflection spectrum of FBGs at different strain values and to build the sensing signal measurement model for an IWDM-based FBG sensor network.
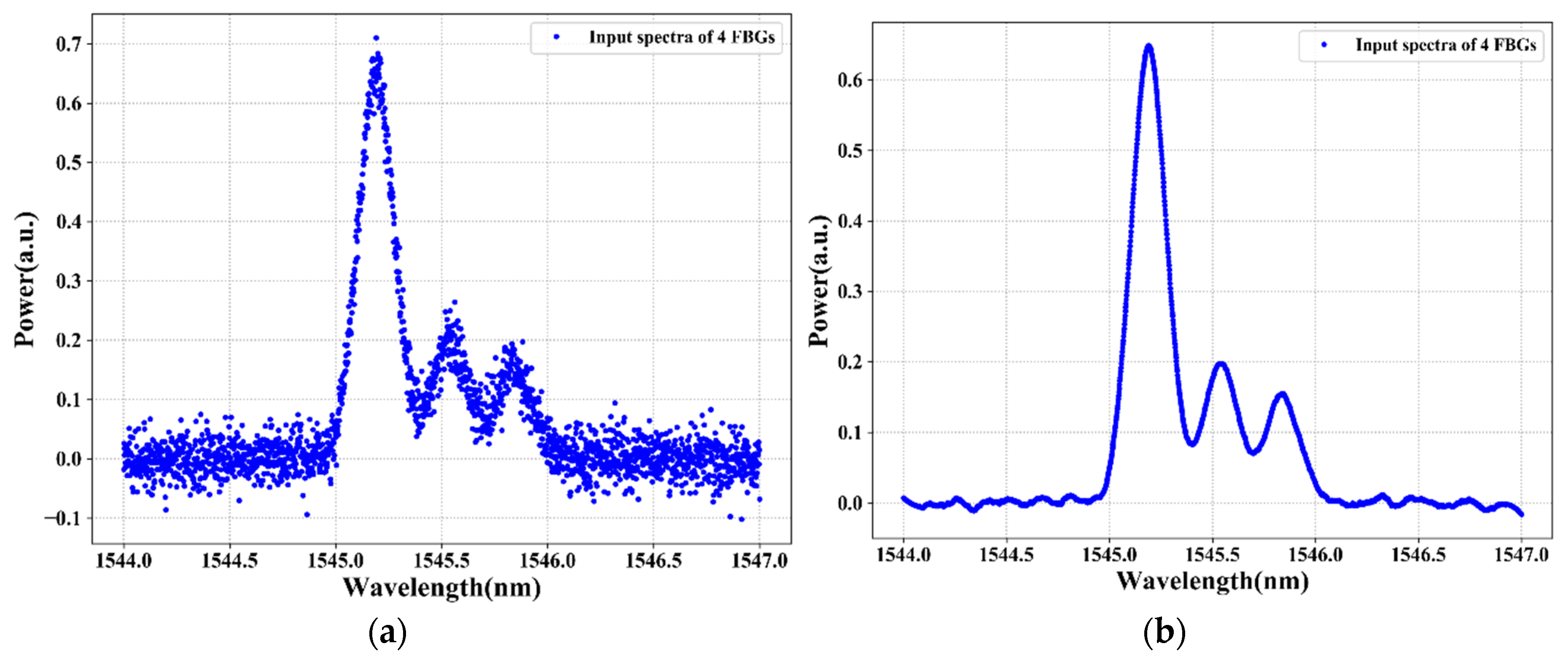
The LSTM model can extract wavelength features from the reflection spectra of FBGs. Then, a well-trained LSTM model can measure the sensing signal of each FBG sensor from the overlapping spectra of FBG sensors. Although the LSTM can measure the sensing signal of FBGs, the measurement error may be high due to noises or interference caused by the instability of the broadband erbium-doped fiber (EDF) amplified spontaneous emission (ASE) source and the rough measurement environments. Thus, noise reduction and signal processing play a significant role in strain sensing signal measurements using machine learning techniques.
In this paper, we proposed a DWT data de-noising mechanism in conjunction with an LSTM model to reduce the noise of the sensor dataset and to improve the signal-to-noise ratio prior to training the LSTM model. The experimental results prove that our proposed LSTM model, integrated with discrete waveform transform (DWT) techniques, achieves a better sensing signal measurement of each FBG sensor with a smaller measurement error. Therefore, the contribution of this paper is a data de-noising technique using a DWT function in conjunction with an LSTM model with the aim of providing accurate sensing signal measurements of each FBG and of improving the multiplexing capability and computational speed of IWDM-based FBG sensor systems.
The rest of this paper is structured as follows: The operational principle of our proposed IWDM-based FBG sensor system and the proposed LSTM algorithm is described in
Section 2. In
Section 3, the experimental setup, data collection, data preprocessing, and design of our proposed LSTM model are presented. In
Section 4, the test results and the discussion are presented. Finally, in
Section 5, the conclusion is presented.
2. Operational Principle of the IWDM-Based FBG Sensor Network
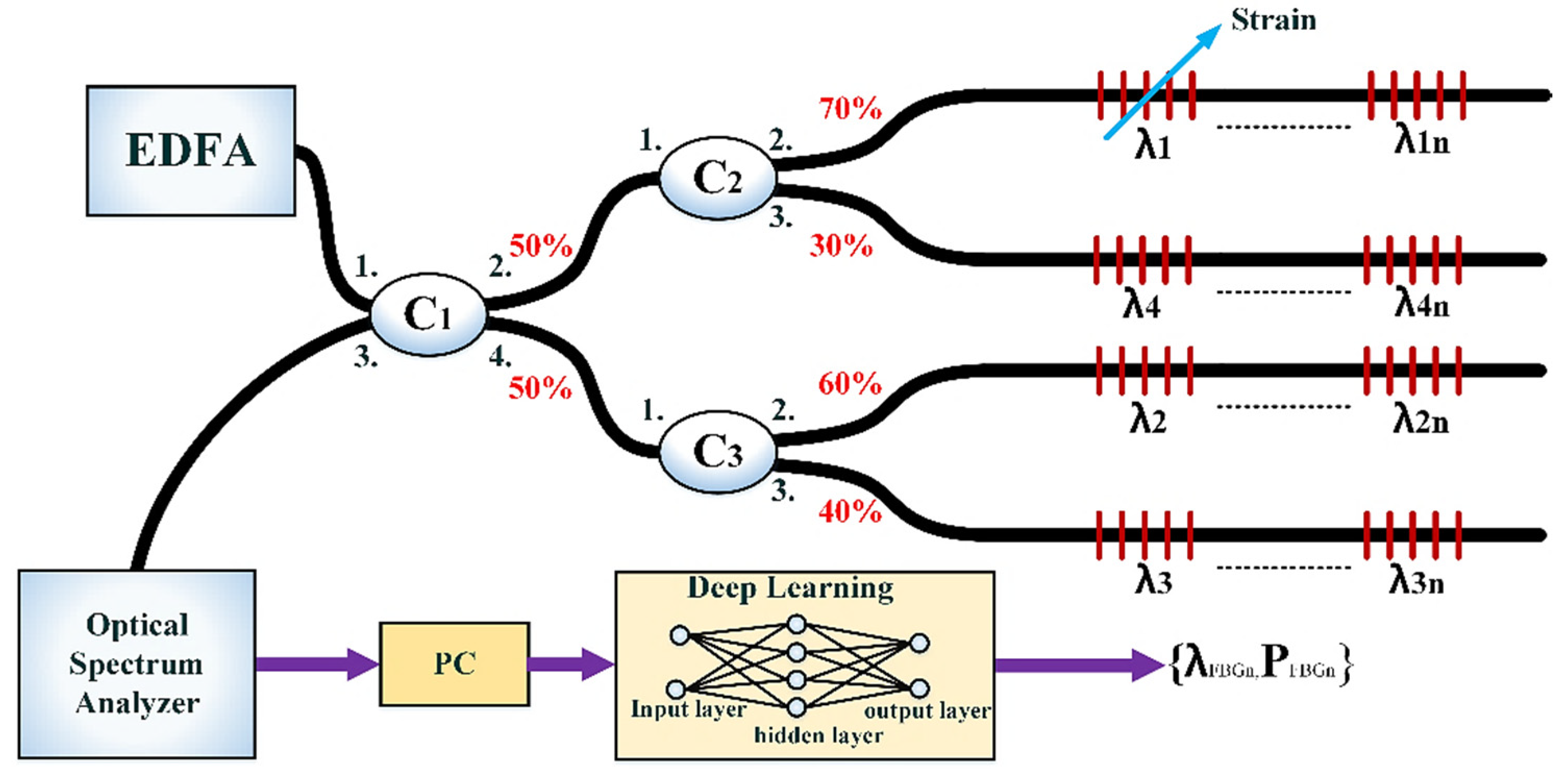
Figure 1 shows the experimental setup of the proposed IWDM-based FBG sensor network. The sensor network structure consists of an erbium-doped amplifier (EDFA), optical spectrum analyzer (OSA), optical coupler (C), a personal computer (PC), and FBGs. The EDFA emits the light. The EDFA is utilized to illuminate the FBG sensor array positioned in a parallel structure. The light produced from the EDFA is passed through a coupler (C1), then split into two divisions (i.e., C1 and C2), and fed into FBG sensors. Then, the reflected signals of FBGs are transmitted to the central office (CO) through the C1 coupler. The OSA, located in the CO, can detect and record the reflected spectra of FBGs. Finally, for additional data processing, the detected reflection spectra of the FBG sensors from OSA will be passed to a personal computer (PC). Thus, the PC is used to perform data preparation and to perform the simulation of the deep learning model for measuring the sensing signals of FBGs.
For the proposed IWDM-based FBG sensor system, the total reflection spectra
of the FBGs is the sum of all FBGs spectra in the sensor system. Assuming that n number of identical FBGs with distinct peak wavelengths are positioned in a parallel structure and that their reflectivity is small enough, the measured spectrum of FBG sensors is expressed as follows:
where
λ is the broadband source’s wavelength,
is the central wavelength of the
ith FBG,
(
λ,
λBi) is the reflected spectrum of the
ith FBG,
n is the total number of FBGs, and noise(
λ) is a random noise.
Furthermore, the return power of the FBGs on the OSA is relative to the broadband source spectrum and the reflection spectrum of the FBGs, which is expressed as follows:
where
Z(
) is the broadband source and
R(
λ) is the spectrum of FBG. Since the broadband source’s spectral width is lower than the FBG bandwidth and the spectrum of FBG is Gaussian shaped, the broadband source’s total returned power can be calculated as follows:
where
,
Rm,
, and Δ
λB are the broadband source wavelength, the peak reflectivity of FBGs, the central wavelength of FBGs, and the FBG’s bandwidth, respectively.
Z is a delta function, and
C is the coefficient of power allocation, which depends on numerous influences, including losses of transmission and fluctuations of power. To demonstrate and verify the proposed system experimentally, we use four FBG sensors in this real experiment as we have four FBGs in our lab. Thus, for a four-FBG sensor, there are four Gaussian spectra that return power for each FBG. In IWDM-based FBG sensor systems, the output power of each FBG is different. The reflective spectra of each FBG sensor have a Gaussian shape, calculated by the following:
where
Ipeak is the peak reflectivity of the FBGs.
In the proposed IWDM-based FBG sensor system, once the reflection spectra of FBGs enter the overlapping region, the reflection spectra of adjacent FBGs can be overlapped. There are three kinds of overlapping situations, such as nonoverlapping spectra of FBGs, partially overlapping spectra of FBGs, and fully overlapping spectra of FBGs. When the spectra of FBGs are nonoverlapping, the spectra of the four FBGs are separate and the strain sensing signal of each FBG can be easily identified. If the reflection spectra of FBGs are partly overlapped, the strain sensing signal of each FBG may be identified. However, when the reflection spectra of two or three adjacent FBGs are completely overlapped, it is very challenging to measure or identify the exact sensing result of each FBGs from the overlapped spectra using conventional peak detection methods or OSA. Moreover, the partial and fully overlapping spectra of FBG sensors also bring peak wavelength cross talks.
Thus, the conventional peak detection (CPD) techniques cannot understand the overlapped FBG spectra (cross talk) easily and cannot accurately measure the strain sensing signal of each FBG. In this paper, we propose deep learning techniques to overcome the cross talk of overlapping FBG spectra. Our objective is to measure the sensing signal values of FBG1, FBG2, FBG3, and FBG4. However, when FBG1 and FBG2, FBG1 and FBG3, or FBG1 and FBG4 are close and overlap, it is difficult to measure FBG1, FBG2, FBG3, and FBG4 directly from the measured reflection spectrum
. For this reason, we use the proposed LSTM algorithm to measure the sensing signal of each FBGs. In the model training stage, the reflection spectra sequential feature of the four FBGs at different strain steps is set as the input for training the LSTM model. The training data set is built as follows:
where
is the reflection spectra FBGs,
is the central wavelength of the four FBG sensors at each strain step, and
is the number of sampling points. After completing the training of the LSTM model, the strain sensing signal of each FBG will be measured or recognized from the overlapping spectra of FGB sensors. Thus, the LSTM model can measure the sensing signal of each FBG sensor even if the FBG spectra has cross talk or the overlap problem. The details for the LSTM algorithm are described in the section below.
2.1. Long Short-Term Memory (LSTM) Algorithm
The LSTM algorithm is a special kind of recurrent neural network (RNNs) that manages sequential information by memorizing the information for long periods [
25,
26]. Unlike traditional RNNs, LSTM adds a new framework called a “memory cell” with an internal state to store valuable information [
27]. In LSTM, the block of memory replaces the hidden unit structure of the RNN, as shown in
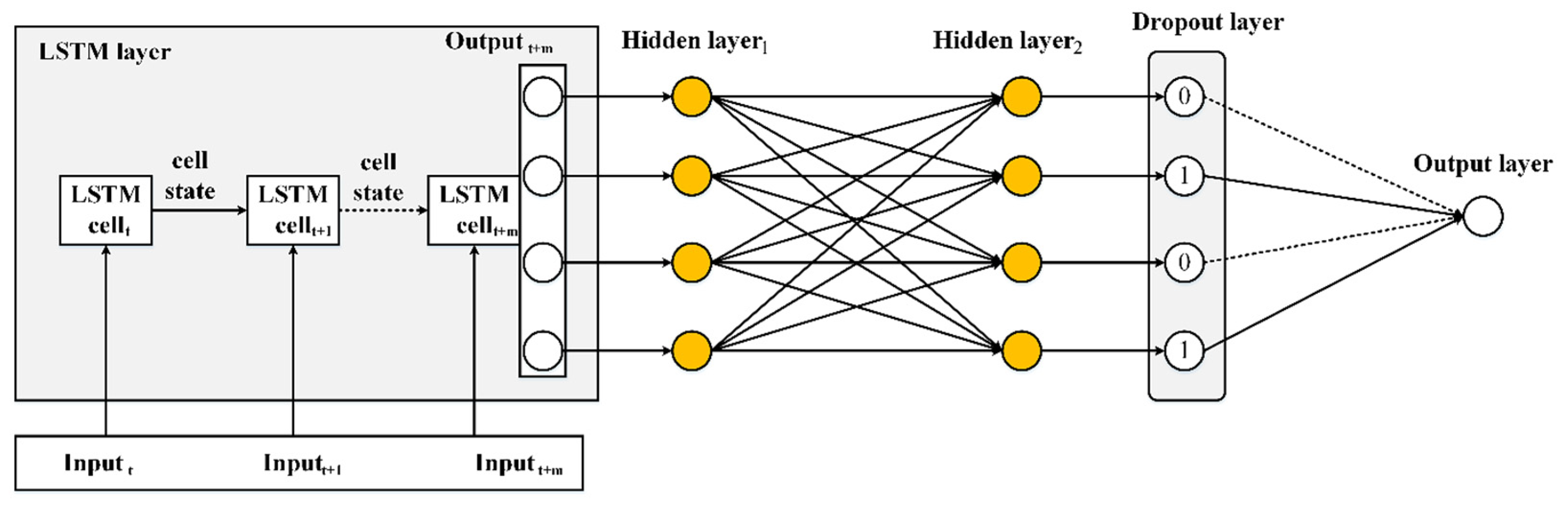
Figure 2. The most important structures in the memory block (cell) of LSTM are the three gates and a cell structure. The three gates of LSTM are input gate, output gate, and forget gate. These three gates are applied into the LSTM memory cell of the hidden layer to solve the problem of the vanishing gradient and to thus make it suitable to avoid long-term dependency problems [
28,
29].
The input gate decides which information in the cell states needs to be updated, and the output gate decides which part of the information in the cell states will be output. The forget gate decides which information should be dropped from the cell state to reset the partial memory [
30]. In this way, LSTM has the option of removing or adding information to the cell state rather than fully overwriting cell states as done by standard RNNs [
28]. Unlike traditional neural feed-forward networks, LSTM is a sequential algorithm that has a capacity to connect prior information to the current task.
Figure 2 shows the LSTM memory cell structure. In the figure, at the time of
t, the input value to the memory cell is
. The input value helps to capture all sequences of the FBG reflection spectra.
The following equations describe how a memory cell layer is updated at each time, t.
First, we calculate the values of the input gate,
, and the values of candidate state,
, for the memory cells states at time
t:
Second, we calculate the activation value of the memory cells of forget gates,
, at time
t:Third, given the activation value of the candidate state,
; input gate,
; and the forget gate,
, we can calculate the new state,
memory cells
at time
t, which is calculated by the combination of
and
and of
and
through the element-wise multiplication (*):
The final step is to determine the output value. We can calculate the value of the output gates and eventually update the hidden state for the next iteration. Their outputs are calculated as follows:
and
are transmitted as the input parameters to the next time step, σ represents the sigmoid function between 0 to 1, and the tanh activation function can set the data value within the range −1 to 1.
where
,
,
, and
are weight matrices which connect
to the gates and the candidate value;
,
,
and
are weight matrices which connect
to the gates and the candidate value; and
,
,
and
are bias vectors of the three gates and candidate value.
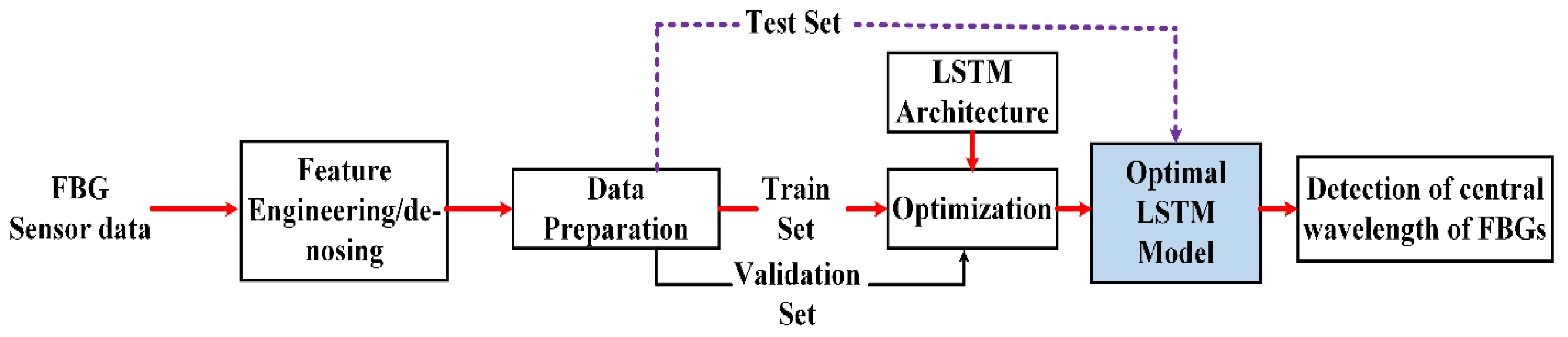
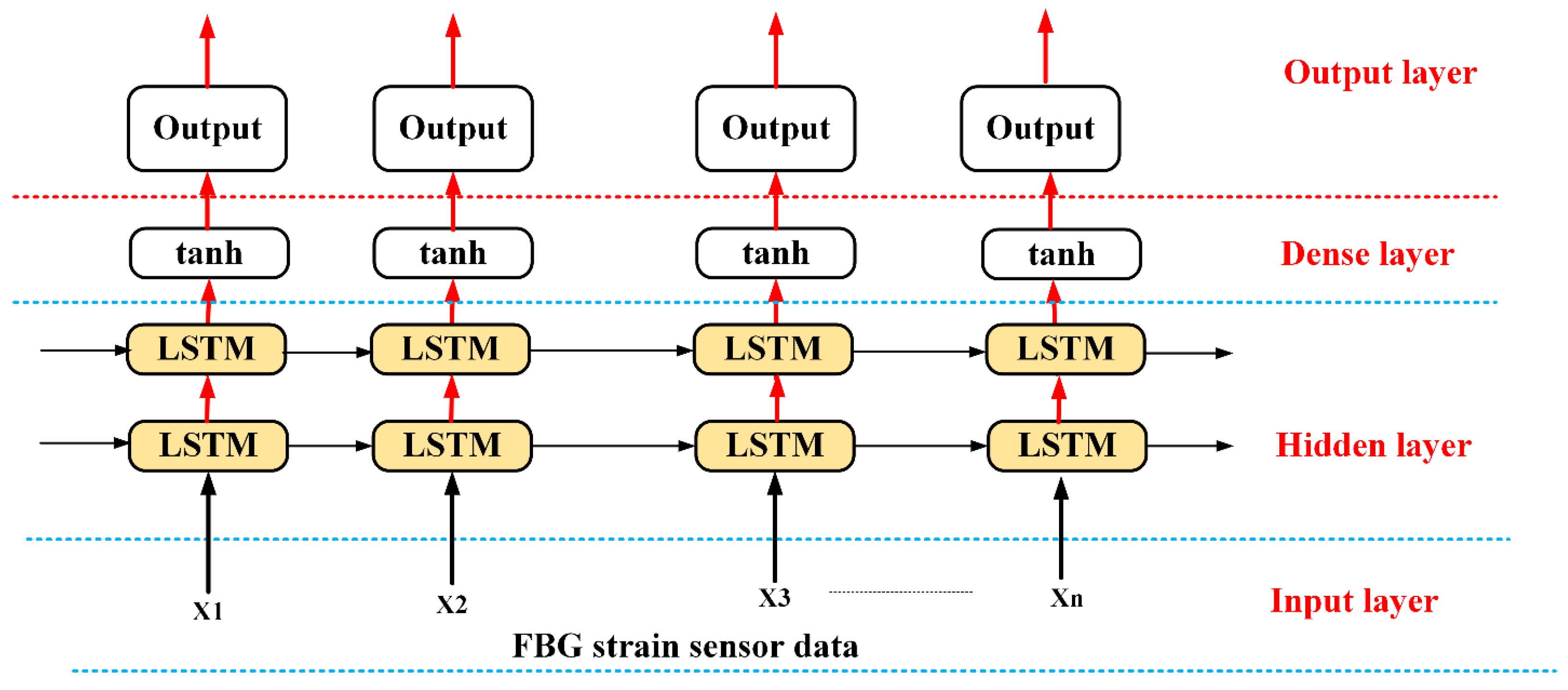
Figure 3 illustrates our proposed architectures of the LSTM algorithms. The first layer of the architecture of our proposed model consists of a layer of LSTM cells. This helps to collect the sensor reflection information about our sensor data throughout different strain sensor values. The LSTM model output may still have remaining nonlinearities; hence, we used two dense hidden layers to solve the distortions or nonlinearities. Then, we implemented a dropout layer to mitigate the risk of overfitting by regularizing the output. Finally, in order to obtain the optimal prediction, the output layer is set to structure the output of the model. Taking the benefit of LSTM in processing sequential data, the sensing signal detection problem is changed into a regression sequential data problem. As shown in
Figure 3, the sensing signal detection is considered as a sequential learning problem. When the sequence of reflection spectra of FBGs X = {
is given as an input, an LSTM-based sensing signal measurement model calculates the hidden value
, and then the output value Z = {
is calculated by the following:
where
b is the bias vector,
W is the weight matrices, and H(.) is the recurrent function of the hidden layer.
2.2. Discrete Waveform Transform (DWT)
DWT is a technique that uses a mother wavelet function to simultaneously analyze a signal in the frequency domain and the time domain. Important data are retrieved from the sensor signal, and noisy data are eliminated from the signal. The wavelet transform will break down signals to low and high frequency to maintain the original data. The wavelet transform breaks down the original signal with processes such as extending and basic wavelet translation. Then, several coefficients of wavelets are obtained. The high-frequency information or low-frequency information of the signals are obtained through high-pass or low-pass filters, respectively [
30,
31]. Let us say that
n is the sensor signal length; then the noised signal,
Y, is expressed as follows:
where
x is the important signal and
z is the unimportant (noisy) signal.
When the noise signal is random and discrete, the resulting wavelet coefficients are therefore relatively low after the DWT. The low-frequency and high-frequency wavelet coefficients are filtered with a pre-seating threshold. The remaining part is then transformed inversely by DWT. Finally, the real signal is constructed. The method of the DWT noise reduction process is described as follows:
- i.
The original data with noise are collected using Equation (1).
- ii.
Apply wavelet transform on the data.
- iii.
Apply threshold processing.
- iv.
Make it the signal reconstruction.
- v.
Finally, the noise of the signal is reduced.
After the wavelet transform is applied to the data, to reduce the fluctuations in peak power and shape of the FBG spectra, the threshold λ is expressed as follows:
where
ε is the control coefficient and
σ is the mean square error.
σ is used as the threshold substrate for wavelet coefficient processing, and
ε is used as the control coefficient for
σ. The control coefficient,
ε, is regulated utilizing the loss established once the training is completed and the threshold
λ is regulated globally. At last,
λ can be used to enhance the original wavelet transform techniques. Moreover, since there are different threshold functions, such as hard-threshold de-noising and soft-threshold de-noising functions, the best threshold function can be chosen. The wavelet coefficient (y) is a function of time in terms of the oscillations, which are localized in both time and frequency. In the soft-threshold de-noising method, when the wavelet coefficient
, the noise can be reset to zero, while when
, the |
| is subtracted by
. The soft-threshold de-noising method is expressed as follows [
30]:
where
y is the wavelet coefficient and λ is the threshold. On the other hand, in the hard threshold-de-noising method, when
, the noise can be reset to zero and, when
, the wavelet coefficient retains
y [
30]. The hard-threshold de-noising method can be expressed as follows:
The final step is that the signal is obtained by the inverse wavelet transform to reconstruct the real signal and to eliminate the noise from the signal.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}