Output-Only Damage Detection in Plate-Like Structures Based on Proportional Strain Flexibility Matrix

 ,
,
Abstract
:1. Introduction
2. Definition of PSFM and Damage Index
2.1. Definition of PSFM
2.2. Definition of the Uniform Load Strain Field
2.3. ULSF Difference-Based Damage Index
3. The Improved Method for Constructing PSFM
4. Results and Discussions
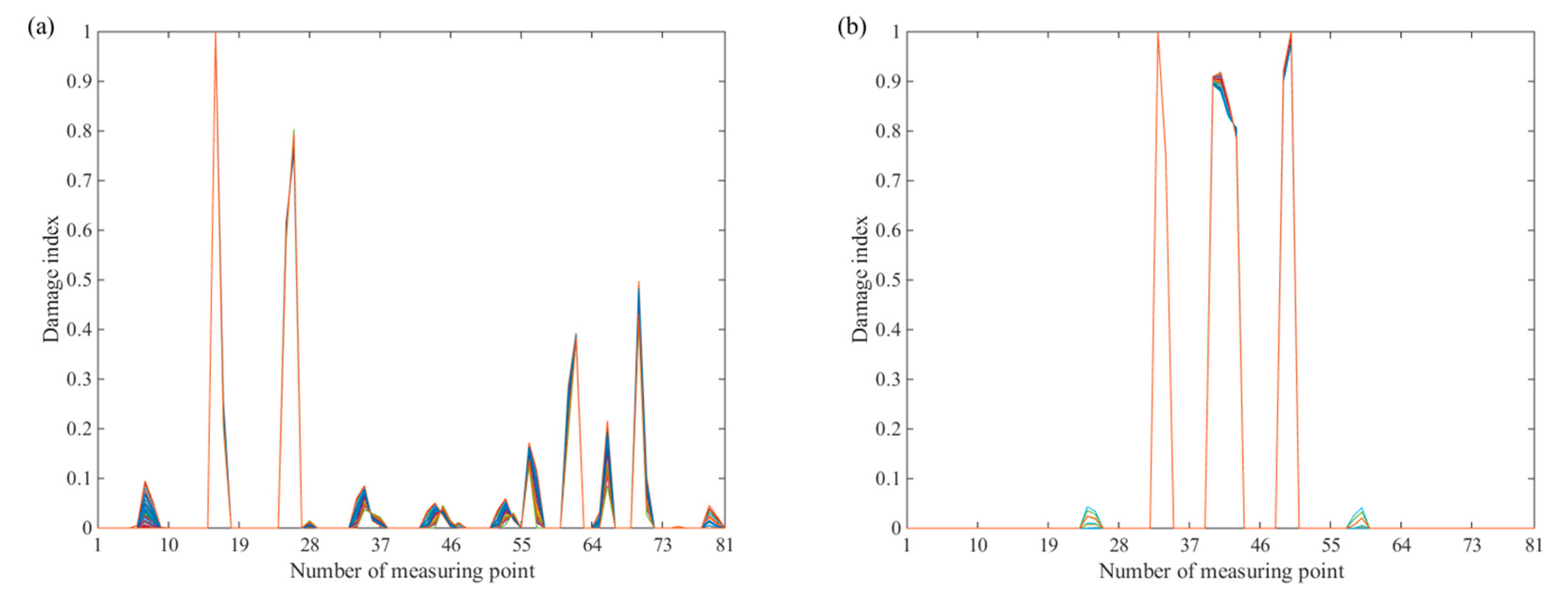
4.1. Case 1: The Simulation Model Constructed in FEM
- (1)
- Analysis of the influence of mass matrix:
- (2)
- The simplified construction method of PSFM:
- (3)
- Effect of measurement noise:
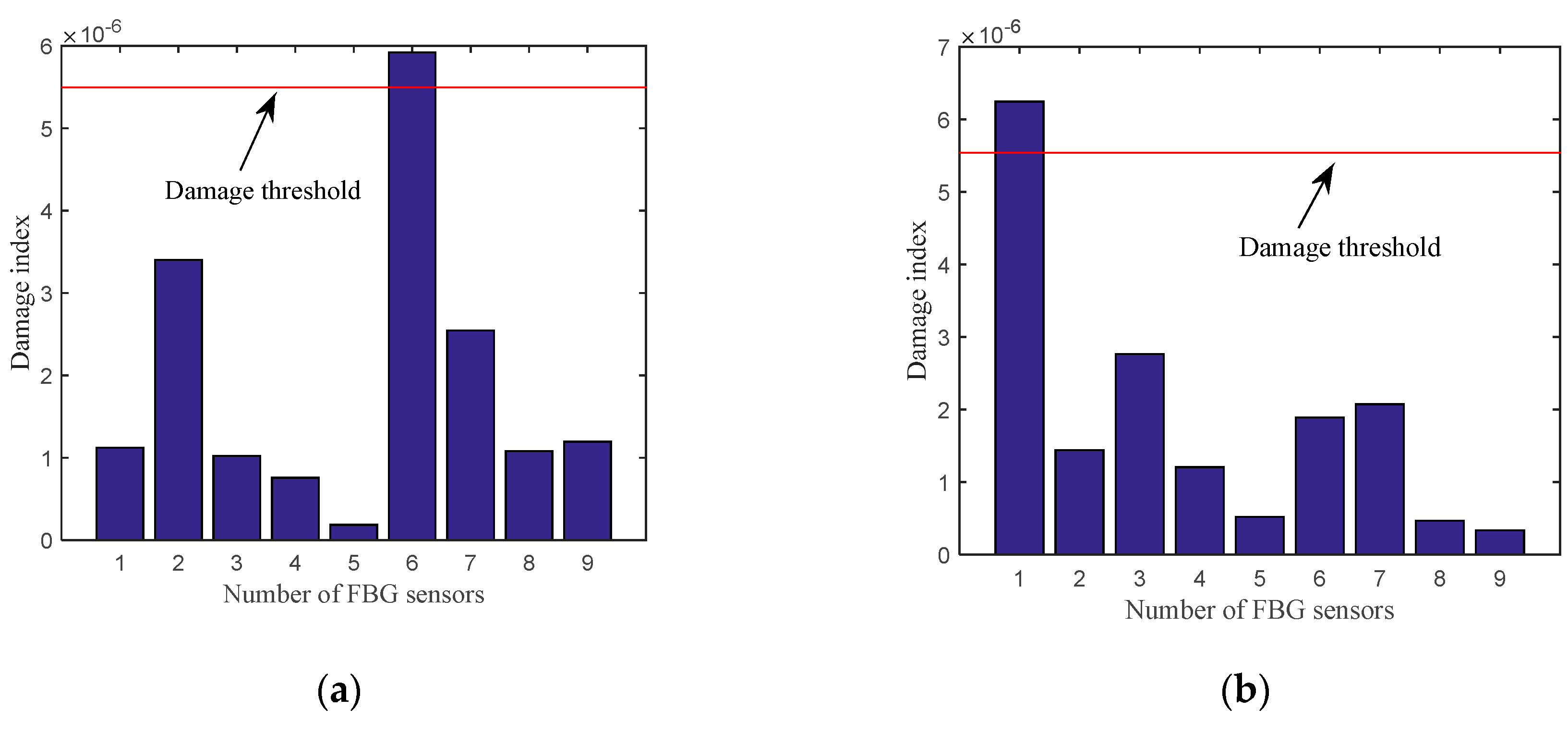
4.2. Case 2: Experimental Model
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A


References
- Goyal, D.; Pabla, B.S. The vibration monitoring methods and signal processing techniques for structural health monitoring: A review. Arch. Comput. Method Eng. 2015, 23, 585–594. [Google Scholar] [CrossRef]
- Das, S.; Saha, P.; Patro, S.K. Vibration-based damage detection techniques used for health monitoring of structures: A review. J. Civ. Struct. Health Monit. 2016, 6, 477–507. [Google Scholar] [CrossRef]
- Wu, D.; Law, S.S. Anisotropic damage model for an inclined crack in thick plate and sensitivity study for its detection. Int. J. Solids Struct. 2004, 41, 4321–4336. [Google Scholar] [CrossRef]
- Shadan, F.; Khoshnoudian, F.; Esfandiari, A. A frequency response-based structural damage identification using model updating method. Struct. Control Health Monit. 2016, 23, 286–302. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Astroza, R.; Conte, J.P.; de Callafon, R.A. Nonlinear finite element model updating for damage identification of civil structures using batch Bayesian estimation. Mech. Syst. Signal. Process. 2017, 84, 194–222. [Google Scholar] [CrossRef]
- Su, W.C.; Huang, C.S.; Hung, S.L.; Chen, L.J.; Lin, W.J. Locating damaged storeys in a shear building based on its sub-structural natural frequencies. Eng. Struct. 2012, 39, 126–138. [Google Scholar] [CrossRef]
- Salawu, O.S. Detection of structural damage through changes in frequency: A review. Eng. Struct. 1997, 19, 718–723. [Google Scholar] [CrossRef]
- Shi, B.; Qiao, P. A new surface fractal dimension for displacement mode shape-based damage identification of plate-type structures. Mech. Syst. Signal. Process. 2018, 103, 139–161. [Google Scholar] [CrossRef]
- Xu, Y.F.; Zhu, W.D. Non-model-based damage identification of plates using curvature mode shapes. In Dynamics of Civil Structures; Springer: Berlin/Heidelberg, Germany, 2016; Volume 2, pp. 65–86. [Google Scholar]
- Wang, Z.; Liu, M.; Zhu, Z.; Qu, Y.; Wei, Q.; Zhou, Z.; Tan, Y.; Yu, Z.; Yang, F. Clamp looseness detection using modal strain estimated from FBG based operational modal analysis. Measurement 2019, 137, 82–97. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, M.; Qu, Y.; Wei, Q.; Zhou, Z.; Tan, Y.; Hong, L.; Song, H. The detection of the pipe crack utilizing the operational modal strain identified from fiber bragg grating. Sensors 2019, 19, 2556. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Navabian, N.; Bozorgnasab, M.; Taghipour, R.; Yazdanpanah, O. Damage identification in plate-like structure using mode shape derivatives. Arch. Appl. Mech. 2015, 86, 819–830. [Google Scholar] [CrossRef]
- Rehman, A.U.; Worden, K.; Rongong, J.A. On crack detection in tuned and mistuned repeating structures using the modal assurance criterion. Strain 2016, 52, 175–185. [Google Scholar] [CrossRef]
- Meo, M.; Zumpano, G. Damage assessment on plate-like structures using a global-local optimization approach. Optim. Eng. 2007, 9, 161–177. [Google Scholar] [CrossRef]
- Seyedpoor, S.M. A two stage method for structural damage detection using a modal strain energy based index and particle swarm optimization. Int. J. Non-Linear Mech. 2012, 47, 1–8. [Google Scholar] [CrossRef]
- Ghasemi, M.R.; Nobahari, M.; Shabakhty, N. Enhanced optimization-based structural damage detection method using modal strain energy and modal frequencies. Eng. Comput. 2017, 34, 637–647. [Google Scholar] [CrossRef]
- Aloisio, A.; Di Battista, L.; Alaggio, R.; Fragiacomo, M. Sensitivity analysis of subspace-based damage indicators under changes in ambient excitation covariance, severity and location of damage. Eng. Struct. 2020, 208, 110235. [Google Scholar] [CrossRef]
- Basseville, M.; Mevel, L.; Vecchio, A.; Peeters, B.; Van der Auweraer, H. Output-only subspace-based damage detection-application to a reticular structure. Struct. Health Monit. 2003, 2, 161–168. [Google Scholar] [CrossRef]
- Zhao, J.; Dewolf, J.T. Sensitivity study for vibrational parameters used in damage detection. J. Struct. Eng. 1999, 125, 410–416. [Google Scholar] [CrossRef]
- Hong, W.; Zhang, W.; Gang, G.; Zhishen, W. Comprehensive comparison of macro-strain mode and displacement mode based on different sensing technologies. Mech. Syst. Signal. Process. 2015, 50, 563–579. [Google Scholar] [CrossRef]
- Zonta, D.; Lanaro, A.; Zanon, P. A strain-flexibility-based approach to damage location. Key Eng. Mater. 2003, 245, 87–94. [Google Scholar] [CrossRef]
- Zhang, J.; Xia, Q.; Cheng, Y.; Wu, Z. Strain flexibility identification of bridges from long-gauge strain measurements. Mech. Syst. Signal. Process. 2015, 62, 272–283. [Google Scholar] [CrossRef]
- Adewuyi, A.P.; Wu, Z.S. Modal macro-strain flexibility methods for damage localization in flexural structures using long-gage FBG sensors. Struct. Control Health Monit. 2011, 18, 341–360. [Google Scholar] [CrossRef]
- Zhang, Z.; Aktan, A.E. Application of modal flexibility and its derivatives in structural identification. J. Res. Nondestruct. Eval. 1998, 10, 43–61. [Google Scholar] [CrossRef]
- Loutas, T.H.; Bourikas, A. Strain sensors optimal placement for vibration-based structural health monitoring. The effect of damage on the initially optimal configuration. J. Sound Vib. 2017, 410, 217–230. [Google Scholar] [CrossRef]
- Liu, J.K.; Wei, Z.T.; Lu, Z.R.; Ou, Y.J. Structural damage identification using gravitational search algorithm. Struct. Eng. Mech. 2016, 60, 729–747. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Element N. | Damage Extent |
|---|---|---|
| 1 | 64 | 15% |
| 73 | 20% | |
| 28 | 30% | |
| 18 | 40% | |
| 2 | 36 | 25% |
| 38 | 20% | |
| 47 | 25% |
| Parameters | Center (x, y) (mm) | Length (mm) | Width (mm) | State |
|---|---|---|---|---|
| Plate A | — | — | — | Intact |
| Plate B | (325, 250) | 50 | 0.3 | Damaged |
| Plate C | (225, 25) | 50 | 0.3 | Damaged |
| Modes | Plates | Natural Frequencies (Hz) | Modal Strain | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1# | 2# | 3# | 4# | 5# | 6# | 7# | 8# | 9# | |||
| 1st | A | 29.25 | −11.4 | −15.9 | −13.4 | 2.16 | 2.37 | −12.5 | −9.26 | 6.91 | −11.7 |
| B | 28.38 | −4.06 | −6.22 | −6.14 | 0.83 | 0.60 | −7.00 | −2.81 | 3.10 | −4.42 | |
| C | 29.13 | 3.18 | 2.52 | 1.95 | −0.39 | −0.75 | 2.58 | 2.14 | −1.01 | 1.93 | |
| 2nd | A | 57.25 | 1.16 | 1.35 | 0.16 | −0.18 | −0.04 | 0.16 | −1.25 | 0.88 | −1.69 |
| B | 57.13 | 6.40 | 5.61 | 2.40 | −0.69 | −0.01 | 0.08 | −3.37 | 3.83 | −8.22 | |
| C | 54.88 | 5.49 | 4.51 | 1.99 | −0.60 | 0.11 | 0.50 | −2.39 | 2.40 | −5.03 | |
| 3rd | A | 67.0 | −1.12 | −1.26 | −1.08 | 0.05 | −0.23 | −1.15 | −1.01 | 0.50 | −1.70 |
| B | 67.13 | 3.24 | 3.03 | 3.01 | −0.05 | 0.46 | 2.66 | 2.30 | −1.31 | 5.02 | |
| C | 65.88 | 0.64 | 0.55 | 0.59 | 0.04 | 0.14 | 0.52 | 0.58 | −0.32 | 1.26 | |
| 4th | A | 99.38 | 1.15 | −0.16 | −2.18 | 0.19 | 0.10 | −2.33 | 0.01 | −0.58 | 1.09 |
| B | 97.13 | −0.66 | 0.31 | 1.46 | −0.06 | −0.06 | 1.97 | −0.20 | 0.58 | −1.34 | |
| C | 96.88 | −0.53 | 0.30 | 0.6 | −0.16 | −0.04 | 1.16 | −0.02 | 0.09 | −0.13 | |
| 5th | A | 125.8 | 1.52 | −1.84 | 0.94 | −0.14 | 0.26 | −0.69 | −0.43 | −0.43 | −0.12 |
| B | 125.6 | −2.54 | 2.48 | −1.72 | 0.17 | −0.32 | 1.11 | 0.58 | 0.61 | 0.31 | |
| C | 123.6 | 3.21 | −3.41 | 2.17 | −0.15 | 0.37 | −1.07 | −0.64 | −0.55 | −0.90 | |
| 6th | A | 130.8 | −0.64 | 2.56 | −2.18 | 0.56 | −0.88 | 2.44 | −2.21 | −0.46 | −0.71 |
| B | 129.4 | 0.37 | −1.59 | 1.73 | −0.32 | 0.52 | −1.88 | 0.96 | 0.16 | 0.48 | |
| C | 130.3 | 0.08 | −1.14 | 0.83 | −0.17 | 0.26 | −0.73 | 0.23 | −0.07 | 0.69 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yun, K.; Liu, M.; Lv, J.; Wang, J.; Li, Z.; Song, H. Output-Only Damage Detection in Plate-Like Structures Based on Proportional Strain Flexibility Matrix. Sensors 2020, 20, 6862. https://doi.org/10.3390/s20236862
Yun K, Liu M, Lv J, Wang J, Li Z, Song H. Output-Only Damage Detection in Plate-Like Structures Based on Proportional Strain Flexibility Matrix. Sensors. 2020; 20(23):6862. https://doi.org/10.3390/s20236862
Chicago/Turabian StyleYun, Kang, Mingyao Liu, Jiangtao Lv, Jingliang Wang, Zhao Li, and Han Song. 2020. "Output-Only Damage Detection in Plate-Like Structures Based on Proportional Strain Flexibility Matrix" Sensors 20, no. 23: 6862. https://doi.org/10.3390/s20236862