GNSS-Based Non-Negative Absolute Ionosphere Total Electron Content, its Spatial Gradients, Time Derivatives and Differential Code Biases: Bounded-Variable Least-Squares and Taylor Series




Abstract
:
1. Introduction
2. Data and Background
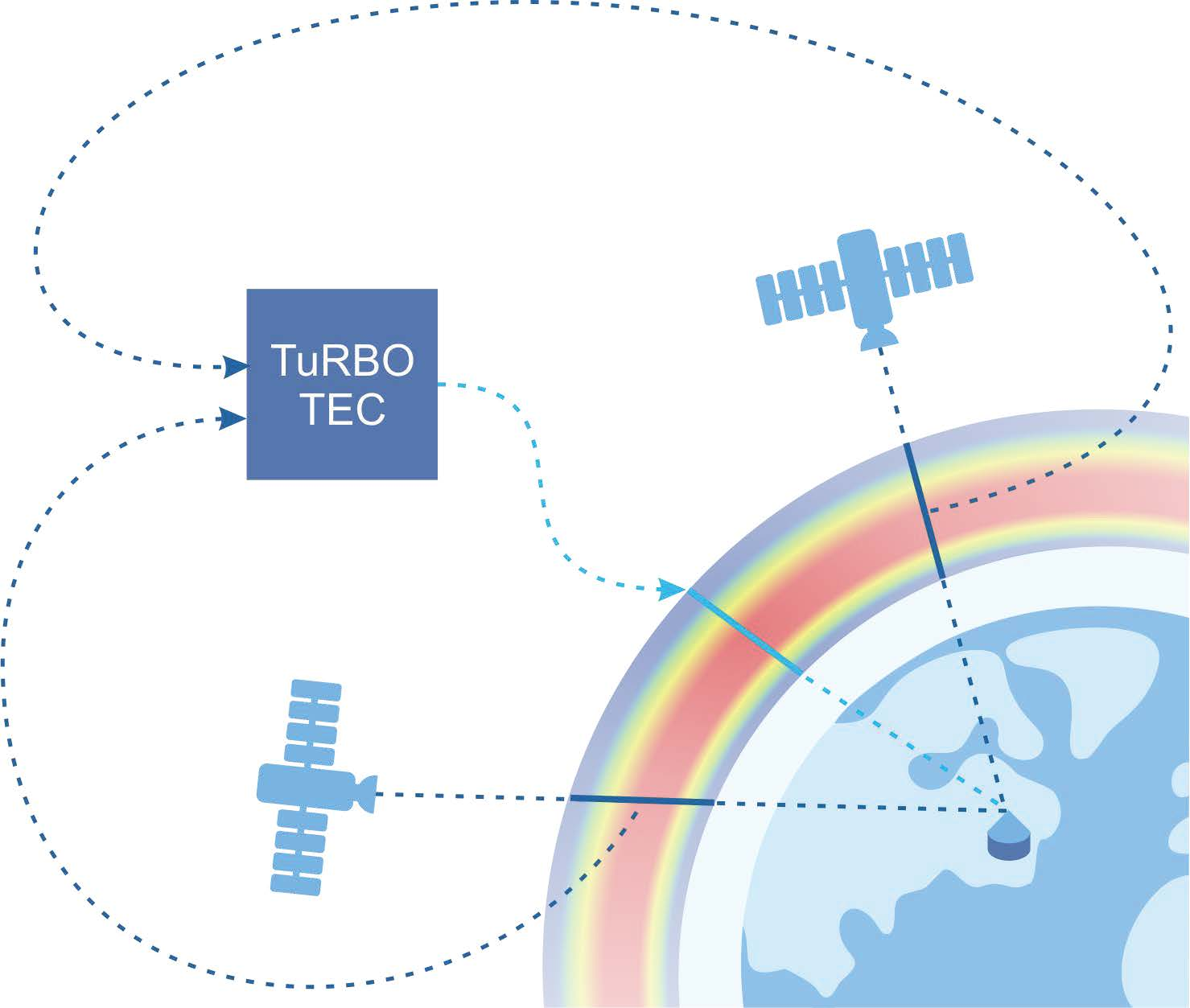
3. TuRBOTEC Algorithm
- (1)
- Calculating TEC based on the pseudorange IP and phase Iφ measurements. For the analysis, we use the data with elevations greater than 10°.
- (2)
- Dividing the data into continuous samples.
- (3)
- (4)
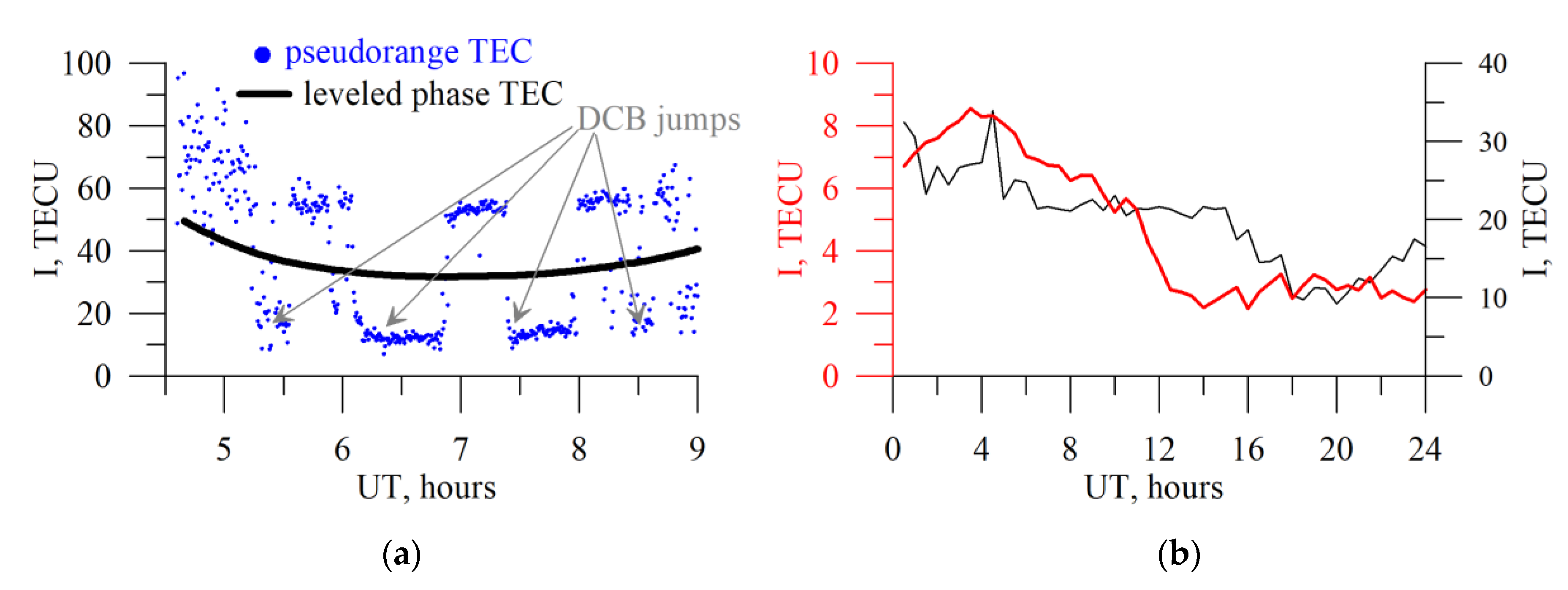
- Eliminating the phase measurement ambiguity (“leveling”, see Figure 2a):, where N is the number of measurements over a continuous interval, S is the mapping function (see below). At this state we obtain experimental slant TEC IExp.
- (5)
- Estimating DCBs by a simple measurement model and determining the model parameters based on minimizing the model data root-mean-square deviation.
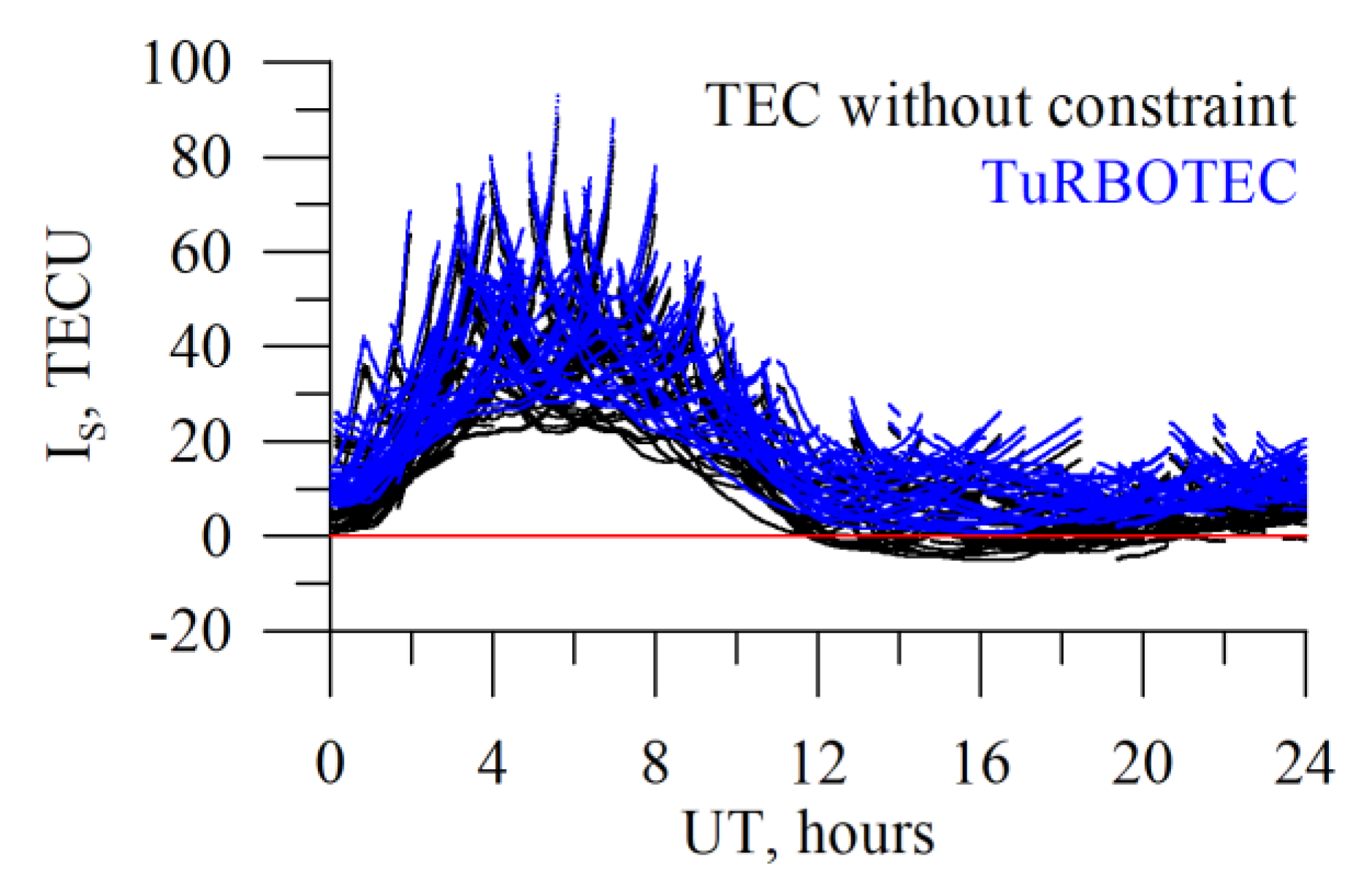
(IDCB)j < (IExp)min,j – C, ∀ satellite j
- (1)
- The algorithm first computes the usual least-squares solution. This solution is returned as optimal, if it lies within the bounds. If not, the algorithm finds all variables within the bounds (free set) and beyond (active set).
- (2)
- At each iteration the algorithm chooses a new variable (which has maximal gradient of the squared objective) to move from the active set to the free set.
- (3)
- New equation system for free set is created where b in (7) is changed by active set. Least-squares solution for new equation system contains variables beyond the bounds, the gradient correction is applied to all the free set (see [36] for details).
- (4)
- The iterations continue until all the variables are in the free set.
4. Technique Validation and Discussion
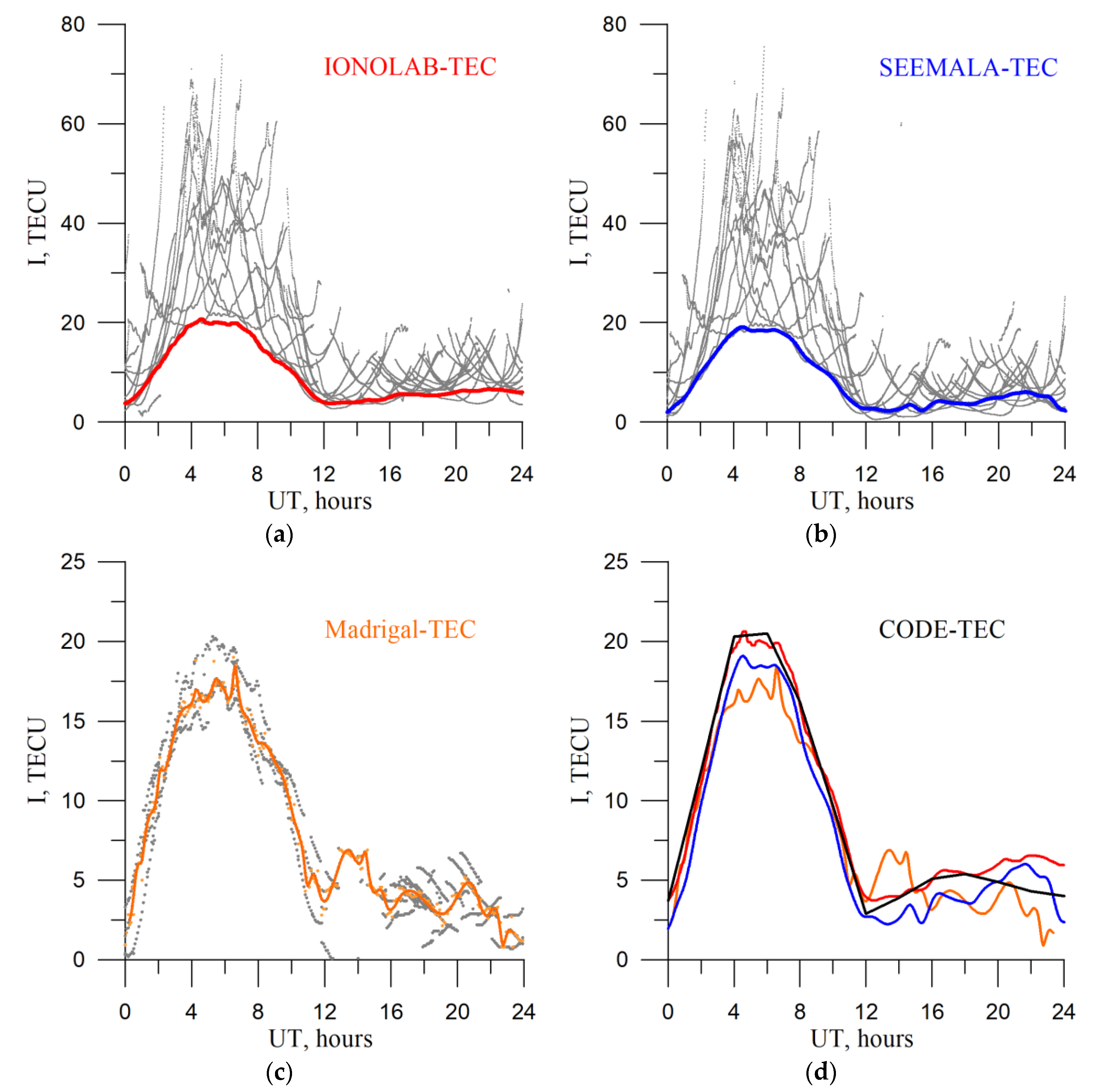
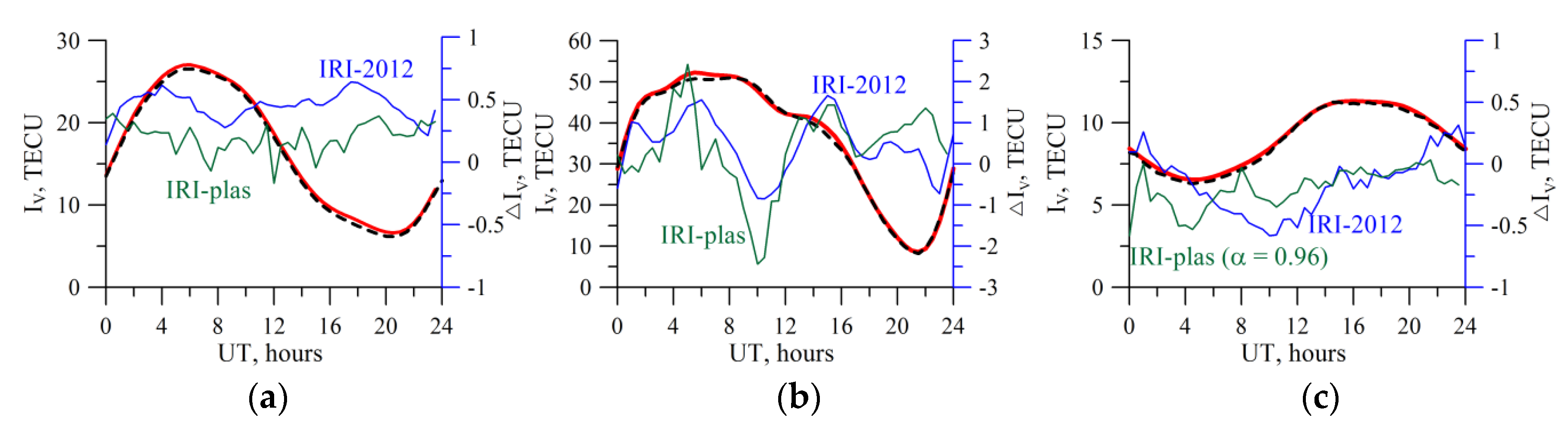
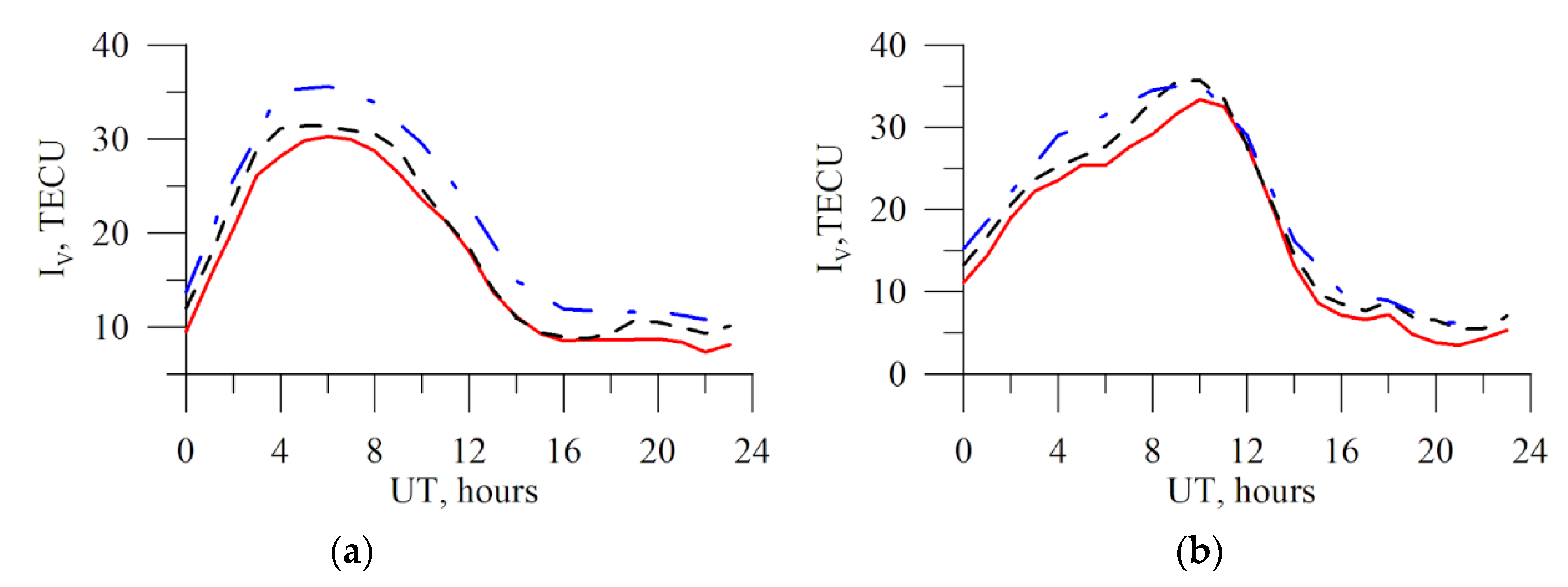
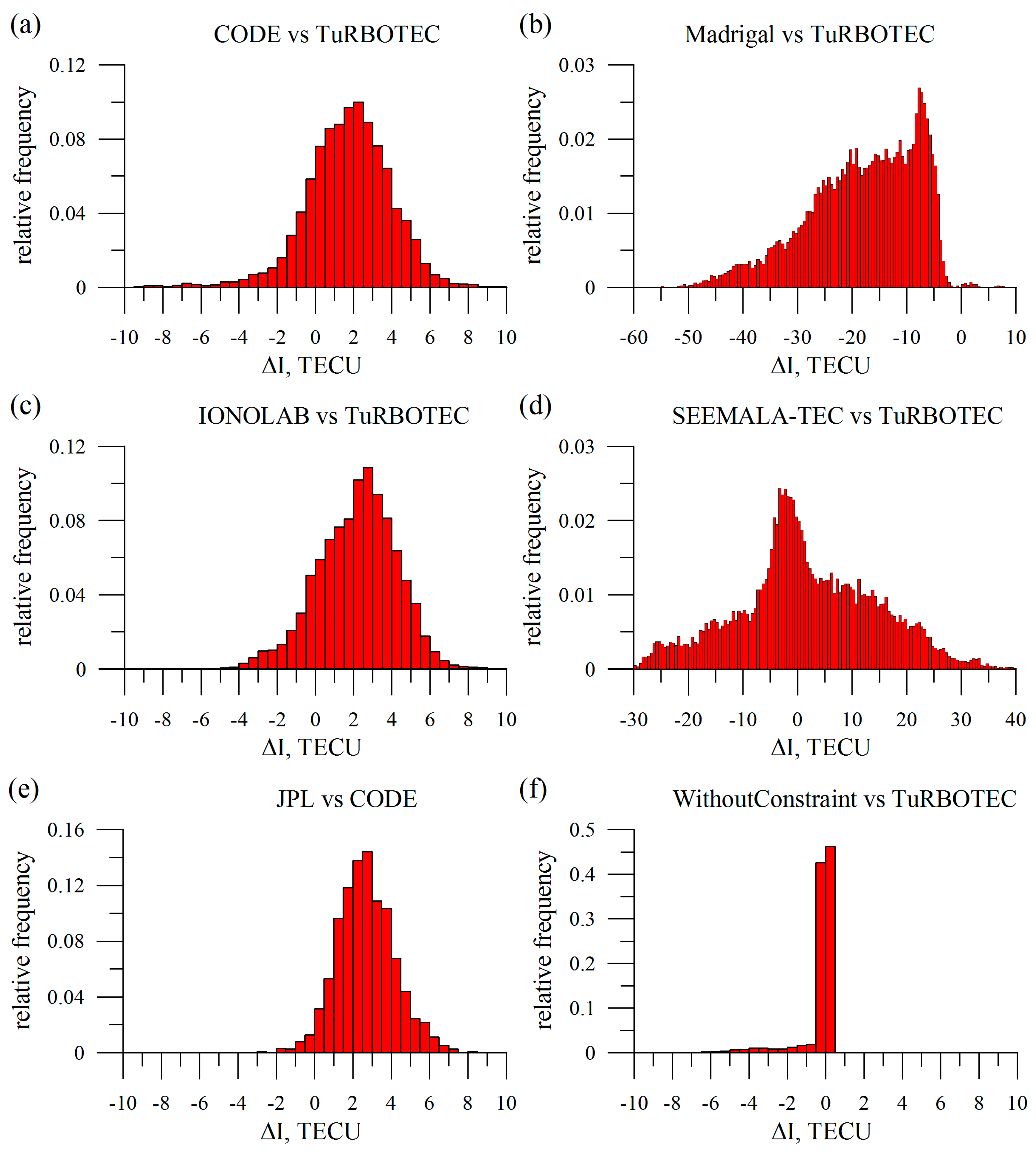
4.1. Absolute Total Electron Content
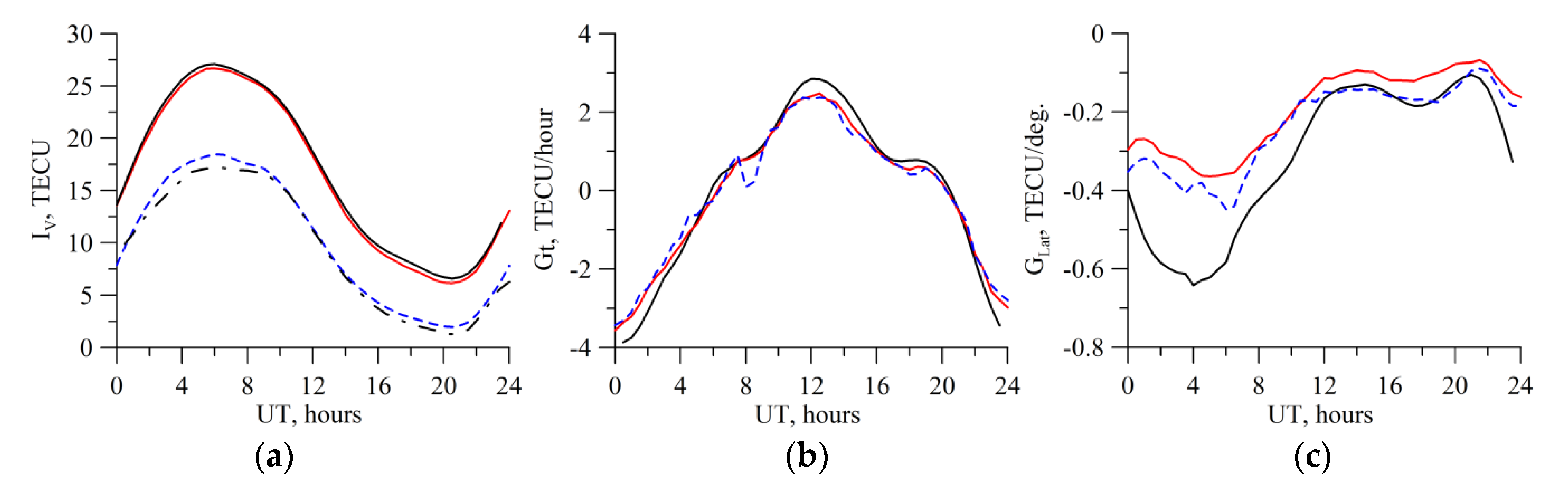
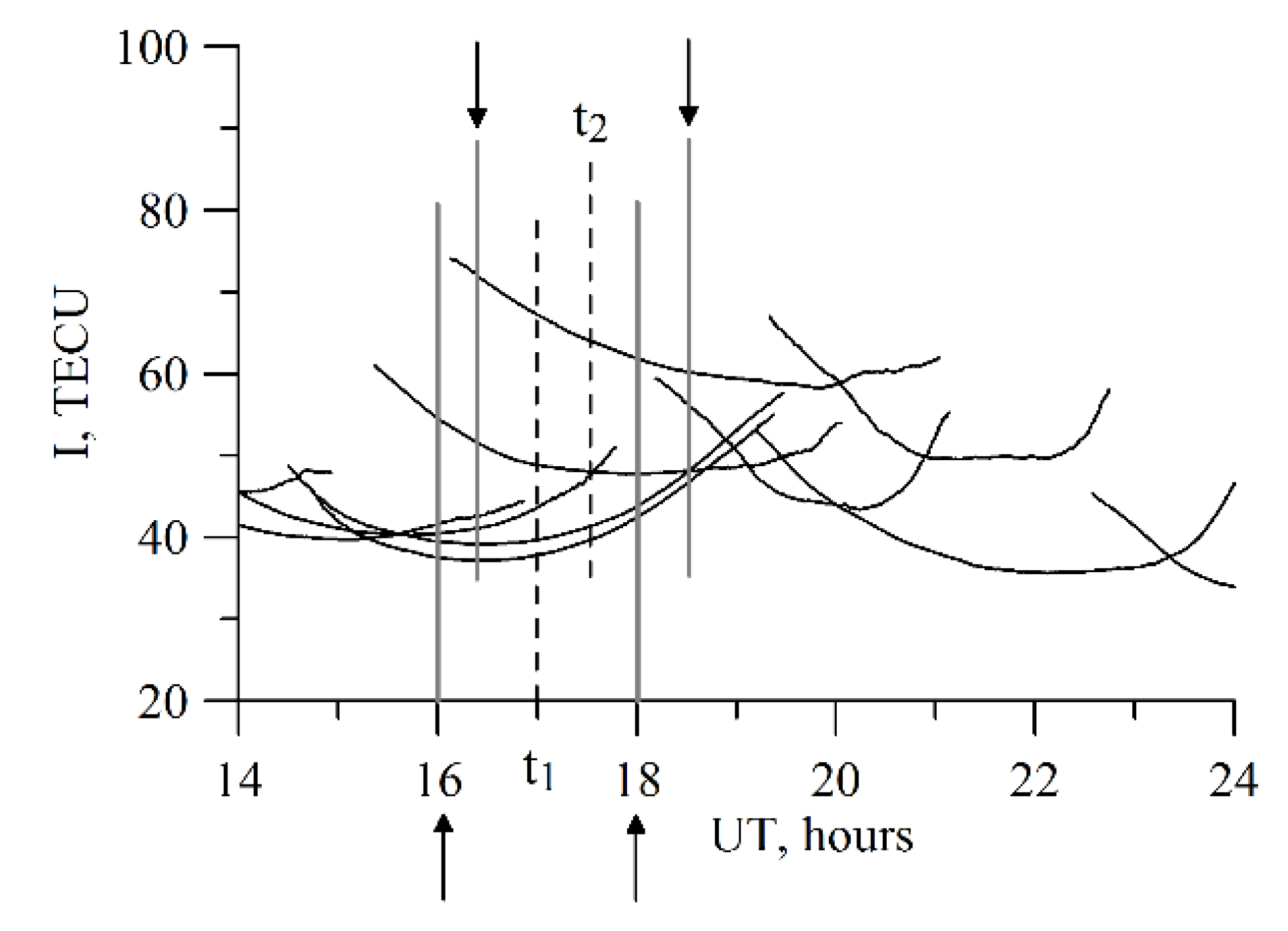
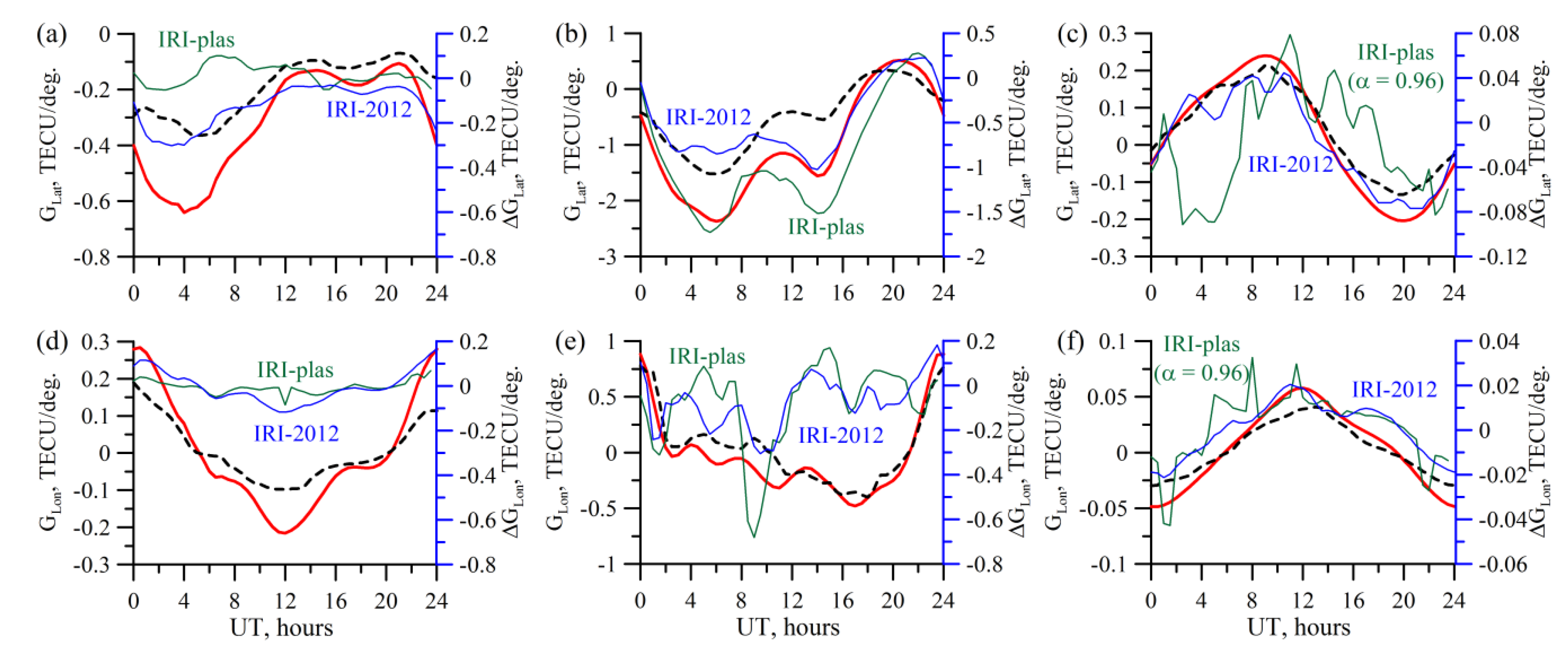
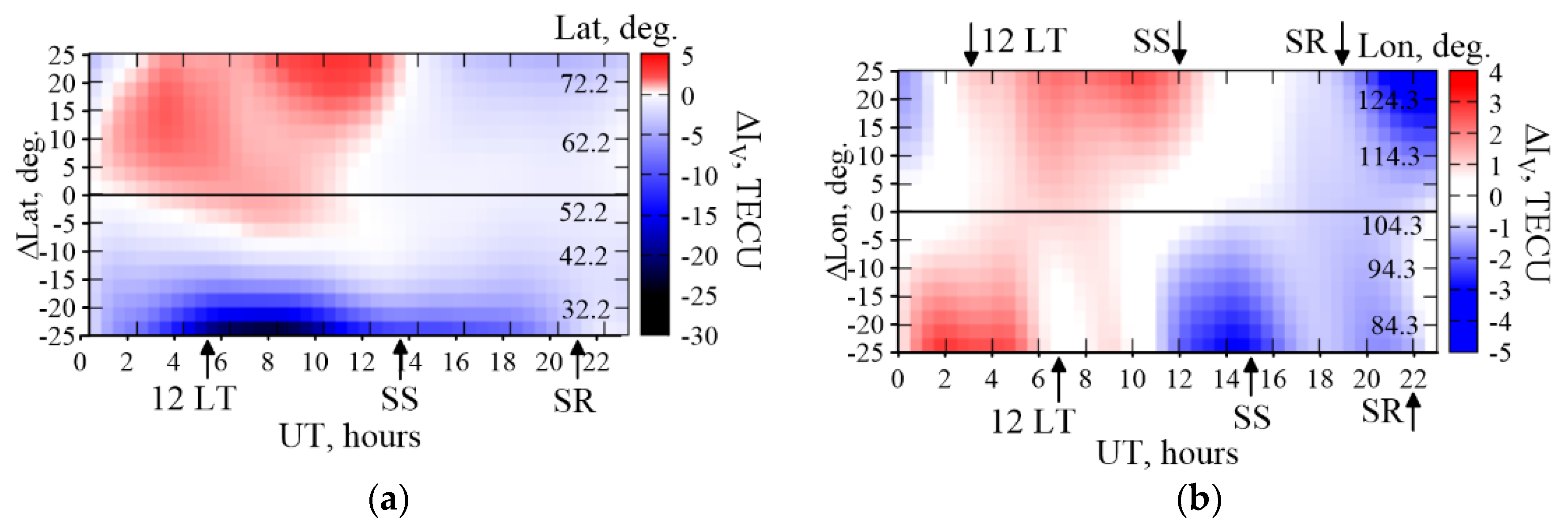
4.2. Spatial Gradients. Accuracy of Determining TEC at a Growing Distance from a Station
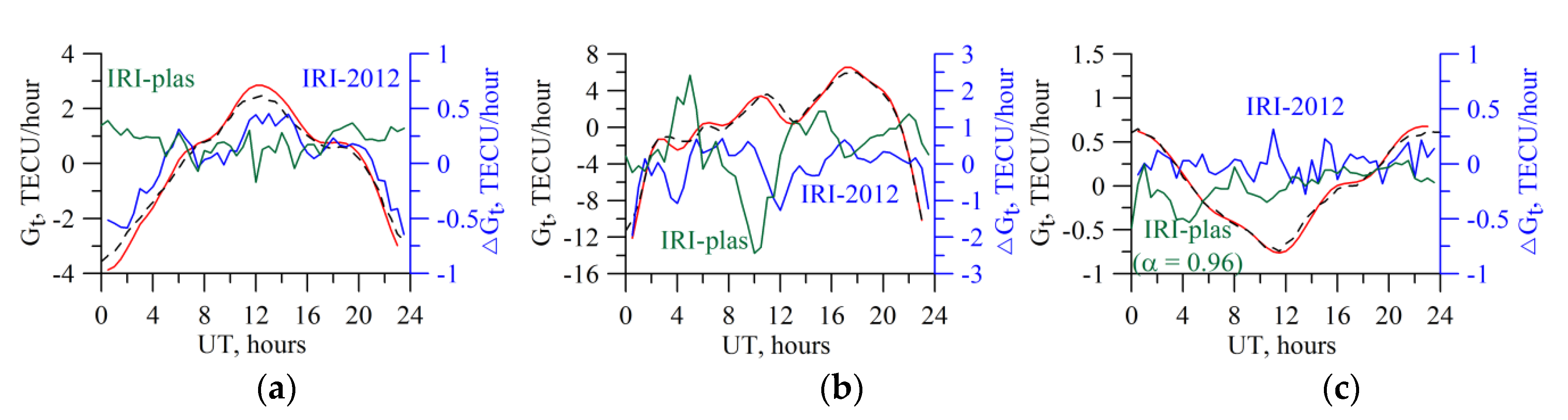
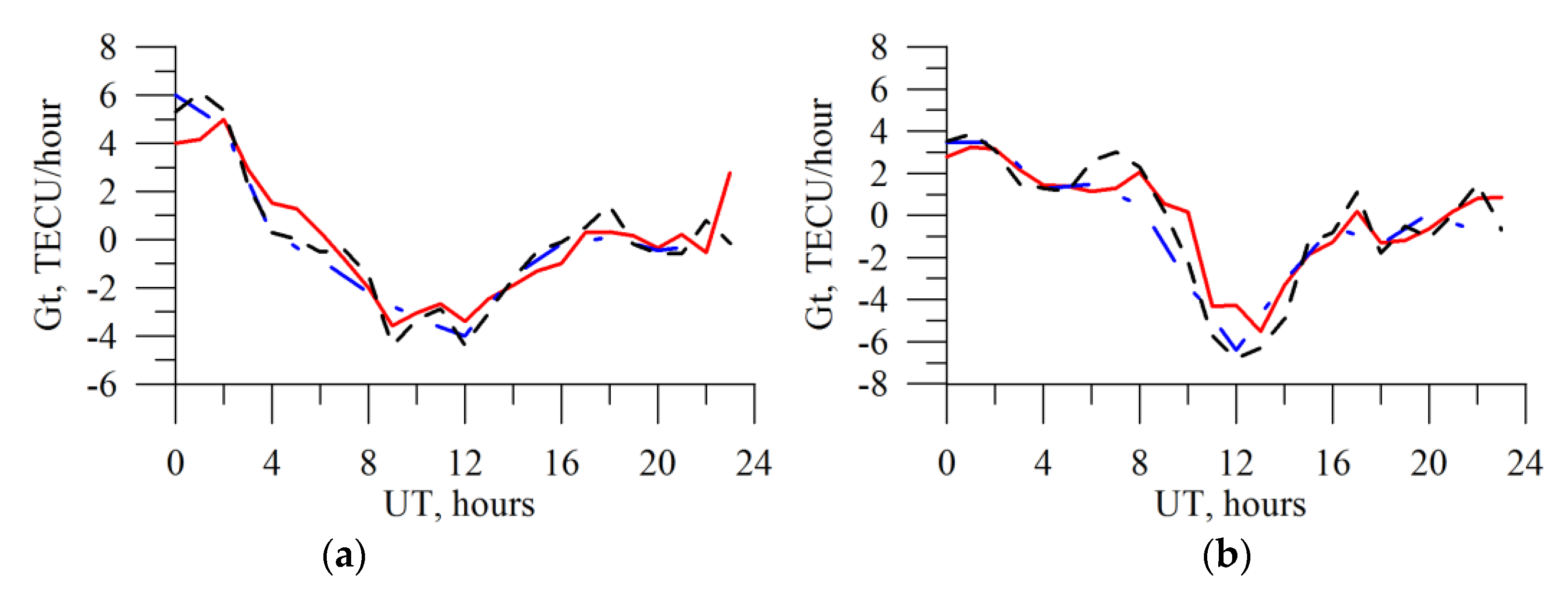
4.3. TEC Time Derivative
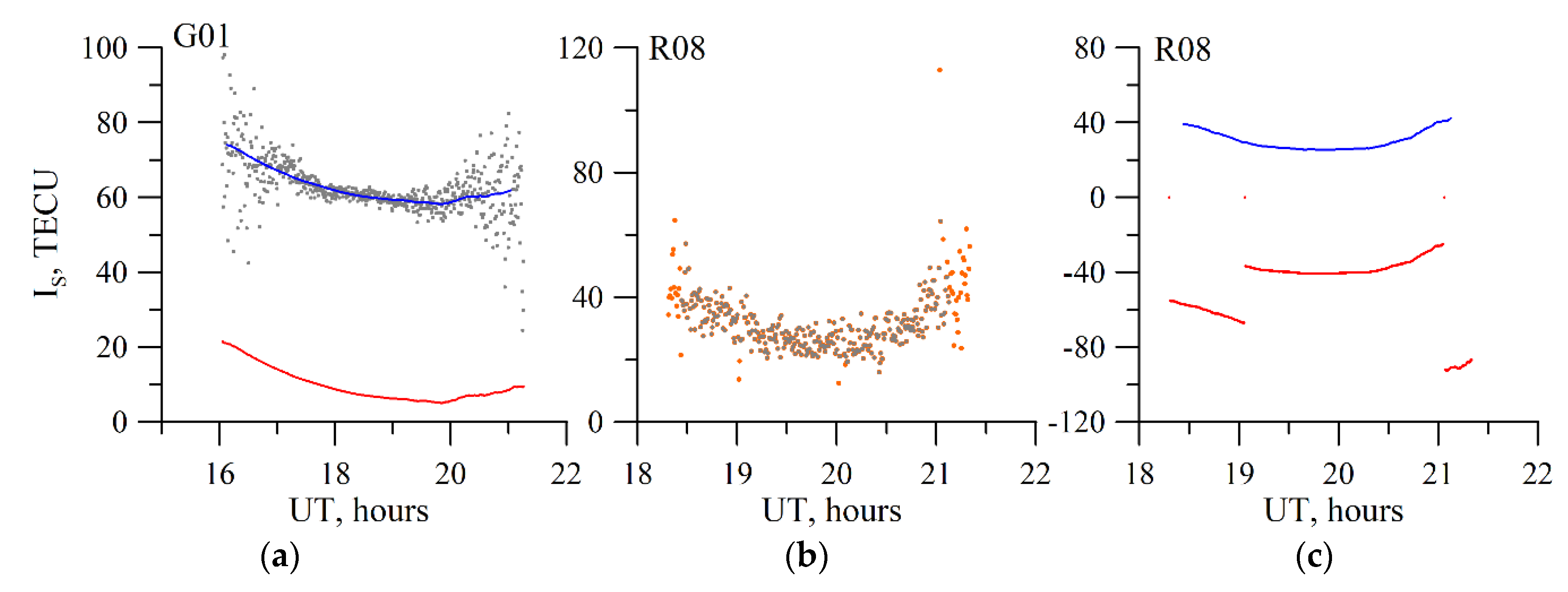
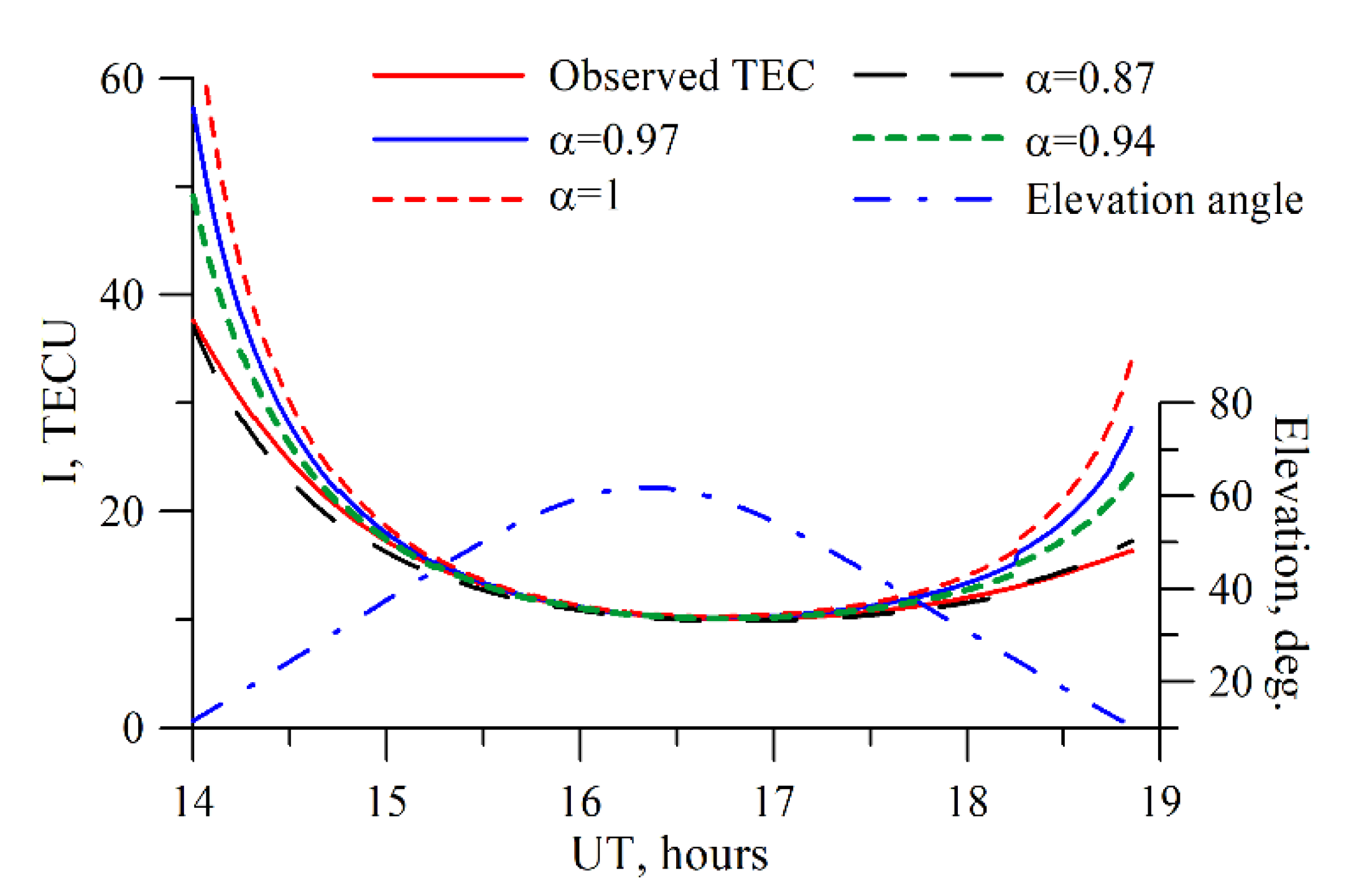
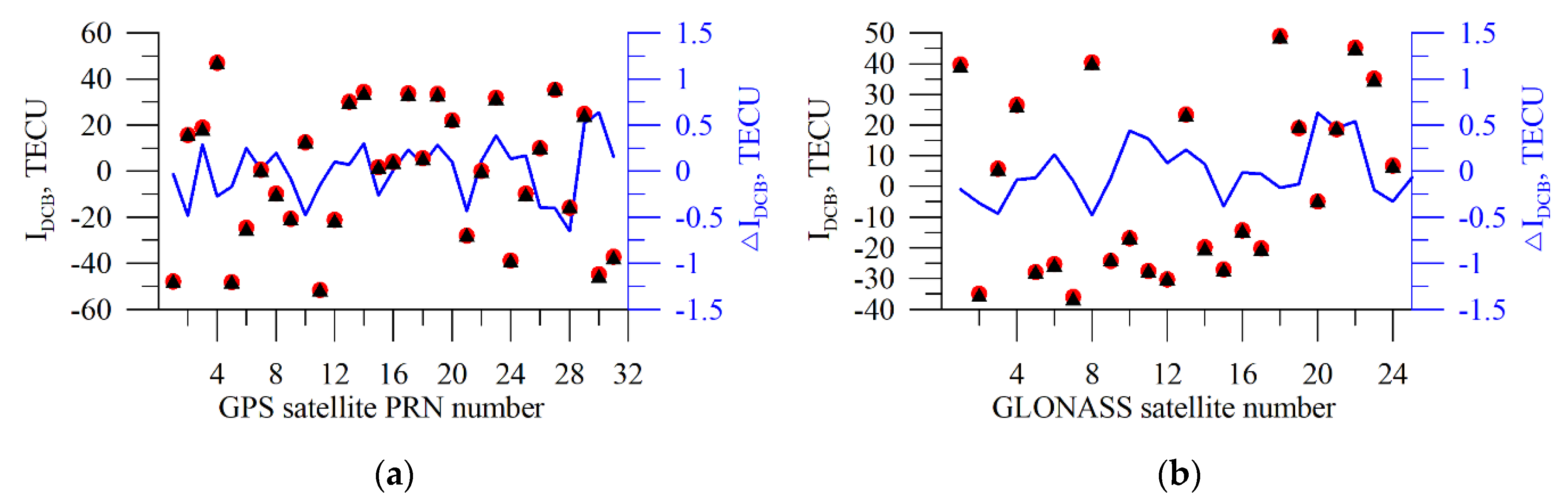
4.4. Differential Code Biases and Absolute Slant TEC
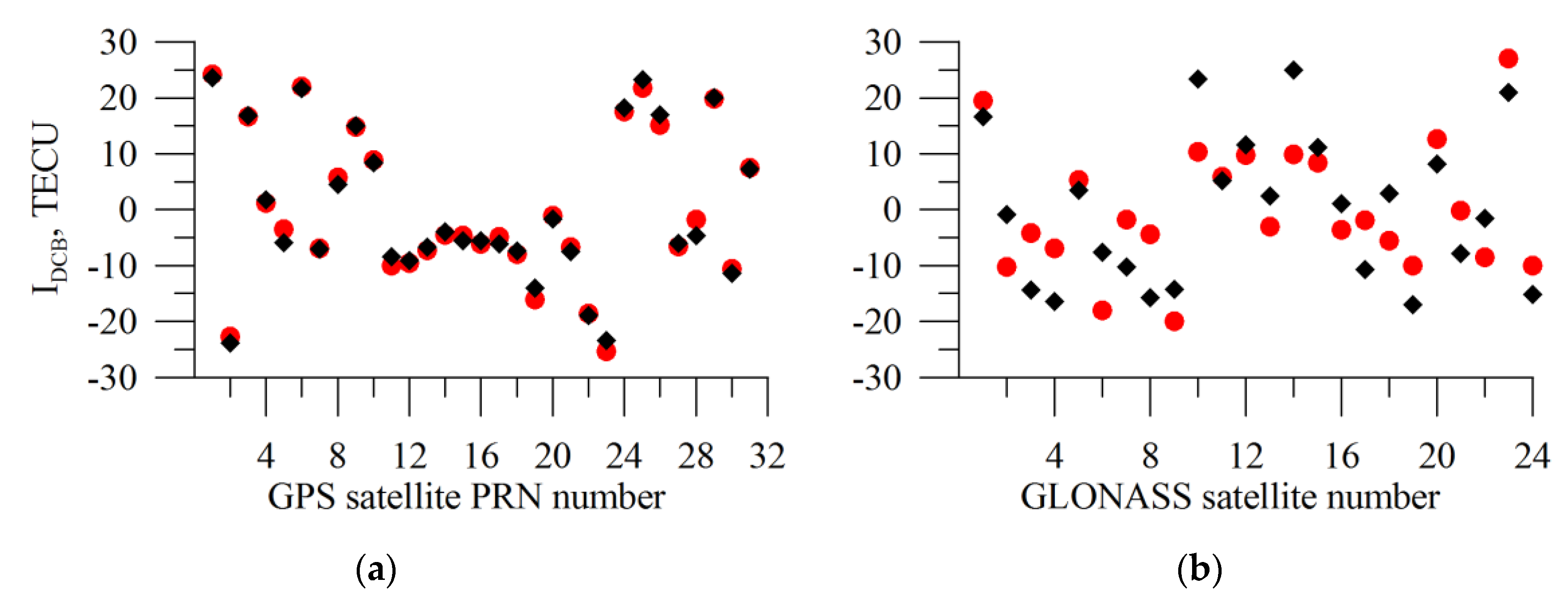
4.5. Influence of Intra-Day DCB Variations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice; Springer-V Sciernce and Business Media LLC: New York, NY, USA, 2001. [Google Scholar]
- Lanyi, G.E.; Roth, T. A comparison of mapped and measured total ionospheric electron content using global positioning system and beacon satellite observations. Radio Sci. 1988, 23, 483–492. [Google Scholar] [CrossRef]
- Calais, E.; Minster, J.B. GPS detection of an ionospheric perturbation following the January 17, 1994, Northridge earthquake. Geophys. Res. Lett. 1995, 22, 1045–1048. [Google Scholar] [CrossRef]
- Afraimovich, E.L.; Astafyeva, E.I.; Demyanov, V.V.; Edemskiy, I.K.; Gavrilyuk, N.S.; Ishin, A.B.; Kosogorov, E.A.; Leonovich, L.A.; Lesyuta, O.S.; Palamartchouk, K.S.; et al. A review of GPS/GLONASS studies of the ionospheric response to natural and anthropogenic processes and phenomena. J. Space Weather. Space Clim. 2013, 3, A27. [Google Scholar] [CrossRef] [Green Version]
- Astafyeva, E.; Rolland, L.; Lognonné, P.; Khelfi, K.; Yahagi, T. Parameters of seismic source as deduced from 1 Hz ionospheric GPS data: Case study of the 2011 Tohoku-oki event. J. Geophys. Res. Space Phys. 2013, 118, 5942–5950. [Google Scholar] [CrossRef]
- Nesterov, I.; Kunitsyn, V. GNSS radio tomography of the ionosphere: The problem with essentially incomplete data. Adv. Space Res. 2011, 47, 1789–1803. [Google Scholar] [CrossRef]
- Kunitsyn, V.E.; Padokhin, A.; Kurbatov, G.A.; Yasyukevich, Y.V.; Morozov, Y.V. Ionospheric TEC estimation with the signals of various geostationary navigational satellites. GPS Solut. 2015, 20, 877–884. [Google Scholar] [CrossRef]
- Forte, B.; Aquino, M. On the estimate and assessment of the ionospheric effects affecting low frequency radio astronomy measurements. In Proceedings of the 2011 XXXth URSI General Assembly and Scientific Symposium, Istanbul, Turkey, 13–20 August 2011. [Google Scholar] [CrossRef]
- Afraimovich, E.; Yasukevich, Y. Using GPS–GLONASS–GALILEO data and IRI modeling for ionospheric calibration of radio telescopes and radio interferometers. J. Atmos. Sol.-Terr. Phys. 2008, 70, 1949–1962. [Google Scholar] [CrossRef]
- Ovodenko, V.; Trekin, V.; Korenkova, N.; Klimenko, M. Investigating range error compensation in UHF radar through IRI-2007 real-time updating: Preliminary results. Adv. Space Res. 2015, 56, 900–906. [Google Scholar] [CrossRef]
- Schaer, S.; Overview of GNSS biases. International GNSS Service Workshop on GNSS Biases. 2012. Available online: http://www.biasws2012.unibe.ch/pdf/bws12_1.3.1.pdf (accessed on 31 August 2020).
- Mylnikova, A.; Yasyukevich, Y.V.; Kunitsyn, V.; Padokhin, A. Variability of GPS/GLONASS differential code biases. Results Phys. 2015, 5, 9–10. [Google Scholar] [CrossRef] [Green Version]
- Choi, B.-K.; Lee, S.-J. The influence of grounding on GPS receiver differential code biases. Adv. Space Res. 2018, 62, 457–463. [Google Scholar] [CrossRef]
- Yasyukevich, Y.V.; Mylnikova, A.A.; Kunitsyn, V.E.; Padokhin, A.M. Influence of GPS/GLONASS differential code biases on the determination accuracy of the absolute total electron content in the ionosphere. Geomag. Aeron. 2015, 55, 790–796. [Google Scholar] [CrossRef]
- Hong, C.-K.; Grejner-Brzezinska, D.A.; Kwon, J.H. Efficient GPS receiver DCB estimation for ionosphere modeling using satellite-receiver geometry changes. Earth Planets Space 2008, 60, e25–e28. [Google Scholar] [CrossRef] [Green Version]
- Jin, R.; Jin, S.; Feng, G. M_DCB: Matlab code for estimating GNSS satellite and receiver differential code biases. GPS Solut. 2012, 16, 541–548. [Google Scholar] [CrossRef]
- Li, H.; Xiao, J.; Zhu, W. Investigation and Validation of the Time-Varying Characteristic for the GPS Differential Code Bias. Remote. Sens. 2019, 11, 428. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Huang, G.; Yang, Y.; Zhang, Q.; Gao, Y.; Zhou, P. Mitigation of Short-Term Temporal Variations of Receiver Code Bias to Achieve Increased Success Rate of Ambiguity Resolution in PPP. Remote. Sens. 2020, 12, 796. [Google Scholar] [CrossRef] [Green Version]
- Gordon, W. Incoherent Scattering of Radio Waves by Free Electrons with Applications to Space Exploration by Radar. IEEE Proc. IRE 1958, 46, 1824–1829. [Google Scholar] [CrossRef]
- Potekhin, A.P.; Medvedev, A.; Zavorin, A.V.; Kushnarev, D.S.; Lebedev, V.P.; Lepetaev, V.V.; Shpynev, B.G. Recording and control digital systems of the Irkutsk Incoherent Scatter Radar. Geomagn. Aeron. 2009, 49, 1011–1021. [Google Scholar] [CrossRef]
- Reinisch, B.; Galkin, I.; Khmyrov, G.M.; Kozlov, A.V.; Bibl, K.; Lisysyan, I.A.; Cheney, G.P.; Huang, X.; Kitrosser, D.F.; Paznukhov, V.V.; et al. New Digisonde for research and monitoring applications. Radio Sci. 2009, 44, 1–15. [Google Scholar] [CrossRef]
- Reinisch, B.W.; Galkin, I.A. Global Ionospheric Radio Observatory (GIRO). Earth Planets Space 2011, 63, 377–381. [Google Scholar] [CrossRef] [Green Version]
- Mitchell, C.N.; Spencer, P.S. A three-dimensional time-dependent algorithm for ionospheric imaging using GPS. Ann. Geophys. 2003, 46, 687–696. [Google Scholar] [CrossRef]
- Jin, S.; Park, J.-U. GPS ionospheric tomography: A comparison with the IRI-2001 model over South Korea. Earth Planets Space 2007, 59, 287–292. [Google Scholar] [CrossRef] [Green Version]
- Bust, G.; Garner, T.W.; Ii, T.L.G. Ionospheric Data Assimilation Three-Dimensional (IDA3D): A global, multisensor, electron density specification algorithm. J. Geophys. Res. Space Phys. 2004, 109. [Google Scholar] [CrossRef] [Green Version]
- Kunitsyn, V.E.; Nesterov, I.A.; Padokhin, A.; Tumanova, Y.S. Ionospheric radio tomography based on the GPS/GLONASS navigation systems. J. Commun. Technol. Electron. 2011, 56, 1269–1281. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Orús, R.; García-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.C.; Krankowski, A.; Zornoza, J. The IGS VTEC maps: A reliable source of ionospheric information since 1998. J. Geod. 2009, 83, 263–275. [Google Scholar] [CrossRef]
- Afraimovich, E.L.; Astafyeva, E.I.; Oinats, A.V.; Yasukevich, Y.V.; Zhivetiev, I. Global electron content: A new conception to track solar activity. Ann. Geophys. 2008, 26, 335–344. [Google Scholar] [CrossRef] [Green Version]
- Mannucci, A.J.; Wilson, B.D.; Yuan, D.N.; Ho, C.H.; Lindqwister, U.J.; Runge, T.F. A global mapping technique for GPS-derived ionospheric TEC measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Schaer, S.; Beutler, G.; Rothacher, M. Mapping and predicting the ionosphere. In Proceedings of the 1998 IGS Analysis Center Workshop, Darmstadt, Germany, 9–11 February 1998; pp. 307–320. [Google Scholar]
- Durmaz, M.; Karslioglu, M.O. Regional vertical total electron content (VTEC) modeling together with satellite and receiver differential code biases (DCBs) using semi-parametric multivariate adaptive regression B-splines (SP-BMARS). J. Geod. 2014, 89, 347–360. [Google Scholar] [CrossRef]
- Sardón, E.; Zarraoa, N. Estimation of total electron content using GPS data: How stable are the differential satellite and receiver instrumental biases? Radio Sci. 1997, 32, 1899–1910. [Google Scholar] [CrossRef]
- Themens, D.R.; Jayachandran, P.T.; Langley, R.B. The nature of GPS differential receiver bias variability: An examination in the polar cap region. J. Geophys. Res. Space Phys. 2015, 120, 8155–8175. [Google Scholar] [CrossRef]
- Schaer, S. Mapping and predicting the Earth’s ionosphere using the global positioning system. Ph.D. Thesis, University of Berne, Berne, Switzerland, 1999. Available online: http://ftp.aiub.unibe.ch/papers/ionodiss.ps (accessed on 31 August 2020).
- Li, Z.; Yuan, Y.; Li, H.; Ou, J.; Huo, X. Two-step method for the determination of the differential code biases of COMPASS satellites. J. Geod. 2012, 86, 1059–1076. [Google Scholar] [CrossRef]
- Start, P.B.; Parker, R.L. Bounded-Variable Least-Squares: An Algorithm and Applications. Comput. Stat. 1995, 10, 129–141. [Google Scholar]
- Waterman, M.S. A restricted least squares problem. Technometrics 1974, 16, 135–136. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, P.; Han, W.; Ge, M.; Shi, C. Eliminating negative VTEC in global ionosphere maps using inequality-constrained least squares. Adv. Space Res. 2013, 51, 988–1000. [Google Scholar] [CrossRef]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The International GNSS Service in a Changing Landscape of Global Navigation Satellite Systems. J. Geod 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Arikan, F.; Arikan, O.; Erol, C.B. Regularized estimation of TEC from GPS data for certain midlatitude stations and comparison with the IRI model. Adv. Space Res. 2007, 39, 867–874. [Google Scholar] [CrossRef]
- Seemala, G.K. GPS-TEC analysis application. 2017. Available online: https://seemala.blogspot.com/ (accessed on 31 August 2020).
- Rideout, W.C.; Coster, A. Automated GPS processing for global total electron content data. GPS Solut. 2006, 10, 219–228. [Google Scholar] [CrossRef]
- Bilitza, D.; Altadill, D.; Zhang, Y.; Mertens, C.; Truhlik, V.; Richards, P.; McKinnell, L.-A.; Reinisch, B. The International Reference Ionosphere 2012―A model of international collaboration. J. Space Weather. Space Clim. 2014, 4, A07. [Google Scholar] [CrossRef]
- Gulyaeva, T.L.; Bilitza, D. Towards ISO Standard Earth Ionosphere and Plasmasphere Model. In Proceedings of the 39th COSPAR Scientific Assembly, Mysore, India, 14–22 July 2012; pp. 1–39. [Google Scholar]
- Cooper, C.; Mitchell, C.N.; Wright, C.J.; Jackson, D.R.; Witvliet, B.A. Measurement of Ionospheric Total Electron Content Using Single-Frequency Geostationary Satellite Observations. Radio Sci. 2019, 54, 10–19. [Google Scholar] [CrossRef]
- Krishna, K.S.; Ratnam, D.V. Determination of NavIC differential code biases using GPS and NavIC observations. Geod. Geodyn. 2020, 11, 97–105. [Google Scholar] [CrossRef]
- Ma, G.; Maruyama, T. Derivation of TEC and estimation of instrumental biases from GEONET in Japan. Ann. Geophys. 2003, 21, 2083–2093. [Google Scholar] [CrossRef] [Green Version]
- Komjathy, A.; Sparks, L.; Wilson, B.D.; Mannucci, A.J. Automated daily processing of more than 1000 ground-based GPS receivers for studying intense ionospheric storms. Radio Sci. 2005, 40, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Zhao, Q.; Zhang, H.; Chen, G. BDS Satellites and Receivers DCB Resolution. In China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume III; Springer: Berlin, Heidelberg, 2014; Volume 305, pp. 187–197. [Google Scholar]
- Blewitt, G. An Automatic Editing Algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef] [Green Version]
- Klobuchar, J.A. Ionospheric Time-Delay Algorithm for Single-Frequency GPS Users. IEEE Trans. Aerosp. Electron. Syst. 1987, 23, 325–331. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.; Sanz, J.; Zornoza, J. New approaches in global ionospheric determination using ground GPS data. J. Atmos. Sol.-Terr. Phys. 1999, 61, 1237–1247. [Google Scholar] [CrossRef]
- Lyu, H.; Hernández-Pajares, M.; Nohutcu, M.; García-Rigo, A.; Zhang, H.; Liu, J. The Barcelona ionospheric mapping function (BIMF) and its application to northern mid-latitudes. GPS Solut. 2018, 22, 67. [Google Scholar] [CrossRef] [Green Version]
- Schüler, T.; Oladipo, O.A. Single-frequency single-site VTEC retrieval using the NeQuick2 ray tracer for obliquity factor determination. GPS Solut. 2013, 18, 115–122. [Google Scholar] [CrossRef]
- Astafyeva, E.; Zakharenkova, I.; Forster, M. Ionospheric response to the 2015 St. Patrick’s Day storm: A global multi-instrumental overview. J. Geophys. Res. Space Phys. 2015, 120, 9023–9037. [Google Scholar] [CrossRef] [Green Version]
- Schaer, S. SINEX BIAS-Solution (Software/technique) INdependent EXchange Format for GNSS Biases Version 1.00. Available online: http://ftp.aiub.unibe.ch/bcwg/format/draft/sinex_bias_100_dec07.pdf (accessed on 7 December 2019).
- Afraimovich, E.L.; Astafyeva, E.I.; Yasukevich, Y.V.; Oinats, A.V.; Zhivetiev, I.V. Response of global and regional ionosphere electron content to solar activity changes. Geomag. Aeron. 2008, 48, 187–200. [Google Scholar] [CrossRef]
- De La Luz, V.; Gonzalez-Esparza, J.A.; Sergeeva, M.A.; Corona-Romero, P.; González, L.X.; Mejia-Ambriz, J.C.; Valdés-Galicia, J.F.; Aguilar-Rodriguez, E.; Rodriguez-Martinez, M.; Romero-Hernandez, E.; et al. First joint observations of space weather events over Mexico. Ann. Geophys. 2018, 36, 1347–1360. [Google Scholar] [CrossRef] [Green Version]
- Sergeeva, M.; Maltseva, O.; Gonzalez-Esparza, J.A.; De La Luz, V.; Corona-Romero, P. Features of TEC behaviour over the low-latitude North-American region during the period of medium solar activity. Adv. Space Res. 2017, 60, 1594–1605. [Google Scholar] [CrossRef]
- Nie, W.; Xu, T.; Rovira-Garcia, A.; Zornoza, J.; Sanz, J.; González-Casado, G.; Chen, W.; Xu, G. Revisit the calibration errors on experimental slant total electron content (TEC) determined with GPS. GPS Solut. 2018, 22, 85. [Google Scholar] [CrossRef] [Green Version]
- Kotova, D.S.; Ovodenko, V.B.; Yasyukevich, Y.V.; Klimenko, M.V.; Ratovsky, K.G.; Mylnikova, A.A.; Andreeva, E.S.; Kozlovsky, A.E.; Korenkova, N.A.; Nesterov, I.A.; et al. Efficiency of updating the ionospheric models using total electron content at mid- and sub-auroral latitudes. GPS Solut. 2019, 24, 25. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Lat, ° | Lon, ° | MLat, ° | MLon, ° | α |
|---|---|---|---|---|---|
| IRKJ | 52.2 | 104.3 | 47.7 | 178.3 | 0.97 |
| NTUS | 1.3 | 103.7 | −7.2 | 176.3 | 0.87 |
| THU2 | 76.5 | 291.2 | 83.8 | 27.1 | 0.94 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yasyukevich, Y.; Mylnikova, A.; Vesnin, A. GNSS-Based Non-Negative Absolute Ionosphere Total Electron Content, its Spatial Gradients, Time Derivatives and Differential Code Biases: Bounded-Variable Least-Squares and Taylor Series. Sensors 2020, 20, 5702. https://doi.org/10.3390/s20195702
Yasyukevich Y, Mylnikova A, Vesnin A. GNSS-Based Non-Negative Absolute Ionosphere Total Electron Content, its Spatial Gradients, Time Derivatives and Differential Code Biases: Bounded-Variable Least-Squares and Taylor Series. Sensors. 2020; 20(19):5702. https://doi.org/10.3390/s20195702
Chicago/Turabian StyleYasyukevich, Yury, Anna Mylnikova, and Artem Vesnin. 2020. "GNSS-Based Non-Negative Absolute Ionosphere Total Electron Content, its Spatial Gradients, Time Derivatives and Differential Code Biases: Bounded-Variable Least-Squares and Taylor Series" Sensors 20, no. 19: 5702. https://doi.org/10.3390/s20195702