Photon Counting LIDAR Based on True Random Coding


Abstract
:1. Introduction
2. Advantages of the True Random Coding Photon Counting LIDAR
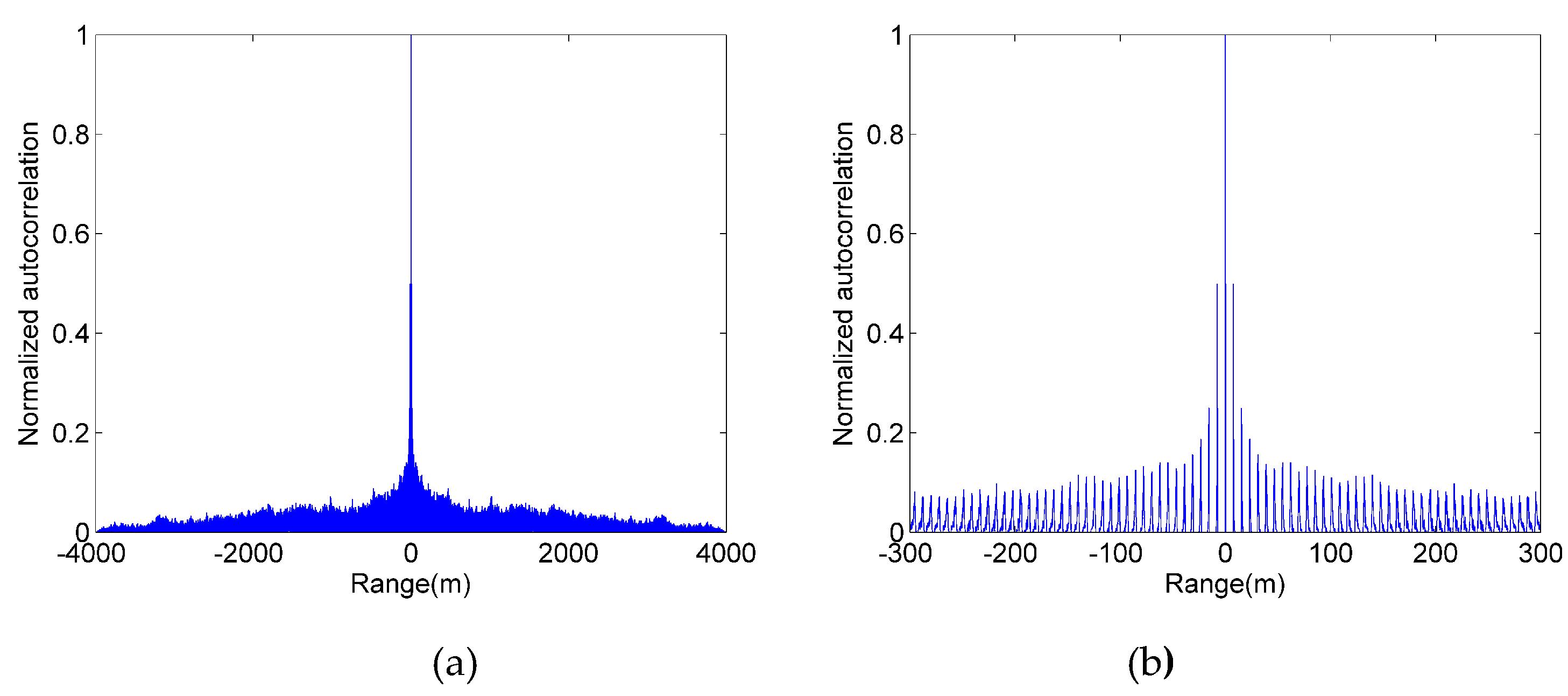
2.1. Compared with Pseudo-Random Sequence
2.2. Compared with the First Modulated Pseudo-Random Sequence
2.3. Compared with the Second Modulated Pseudo-Random Sequence
2.4. Compared with Chaotic Pulse Sequence
2.5. The Advantage of the True Random Sequence
3. True Random Coding Photon Counting LIDAR Ranging Model
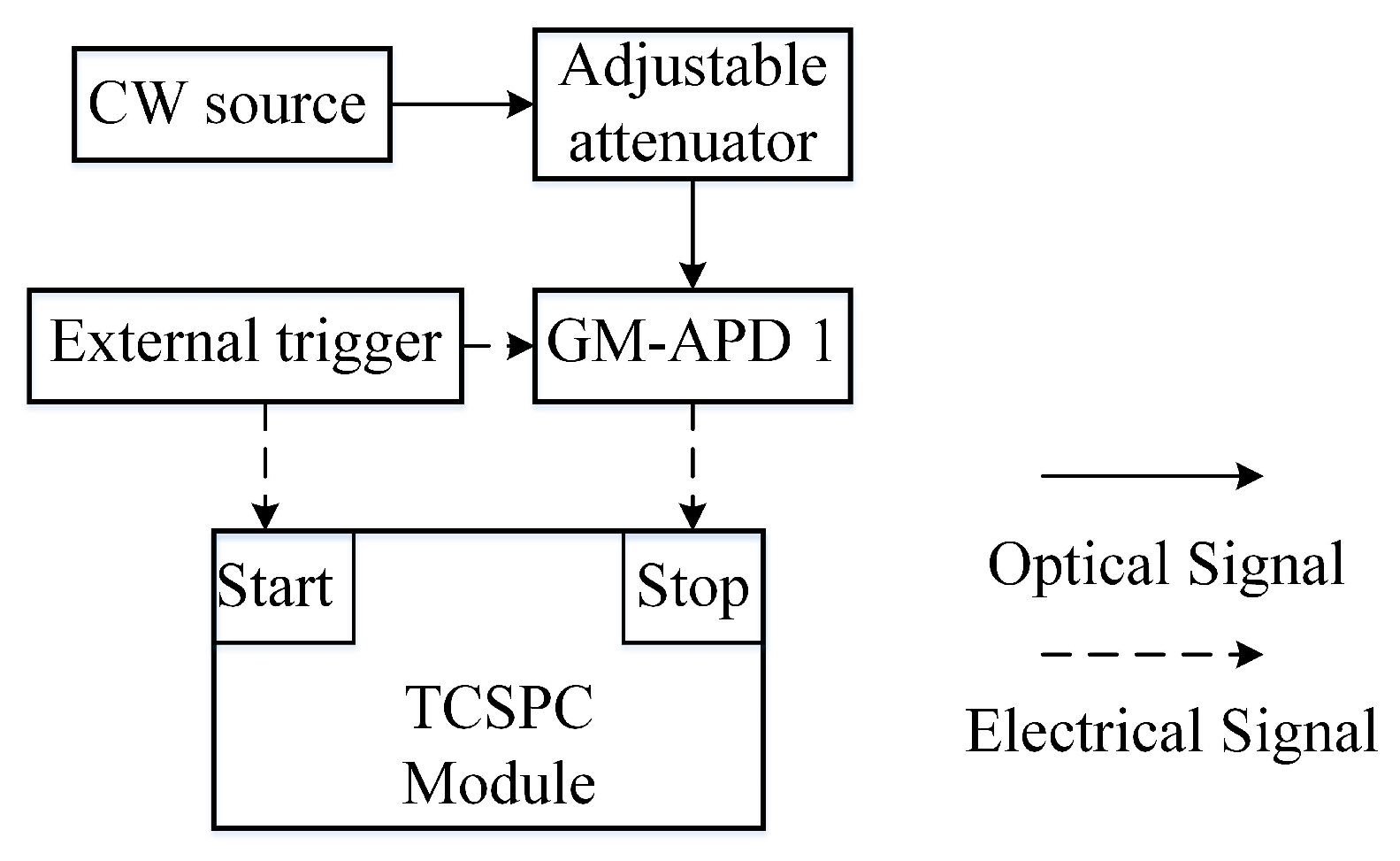
3.1. System Structure of the True Random Coding Photon Counting LIDAR System
3.2. The Ranging Principle of the True Random Coding Photon Counting LIDAR System
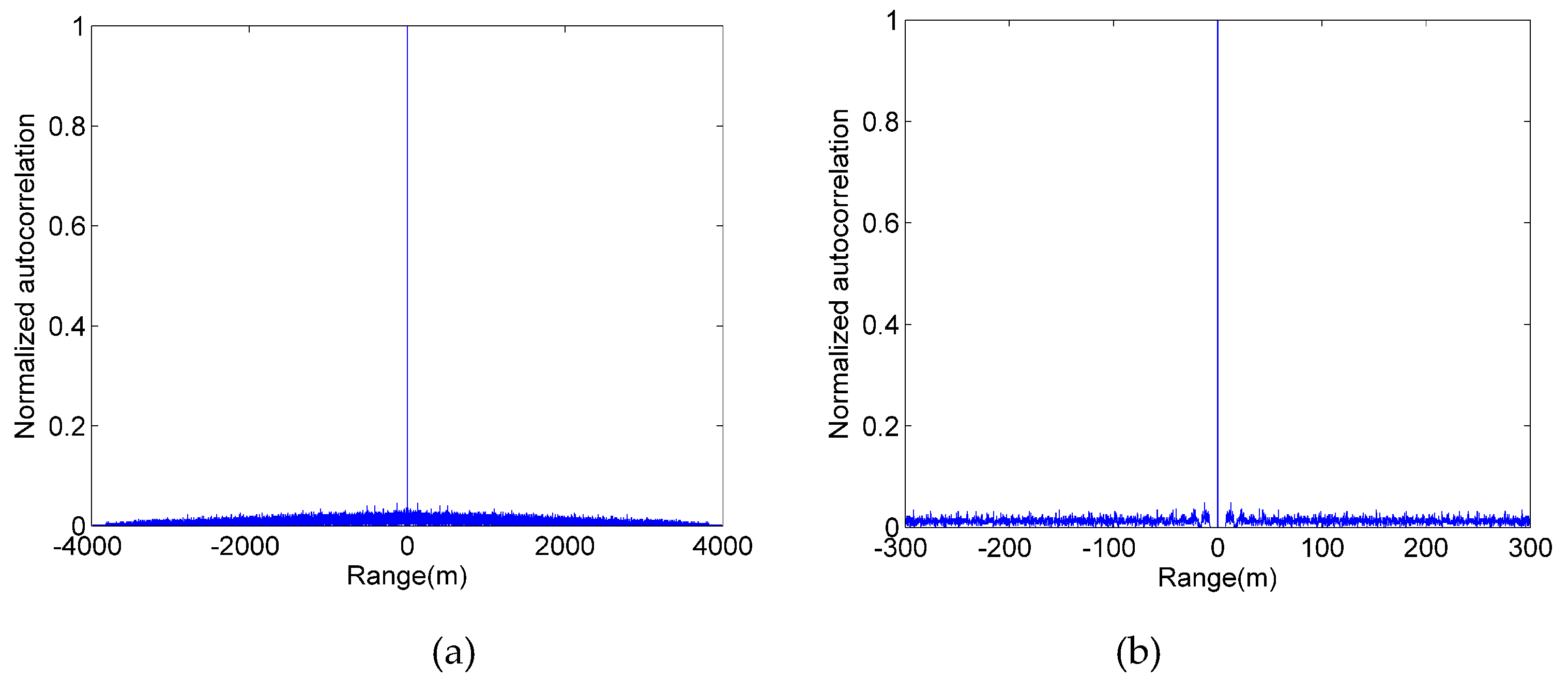
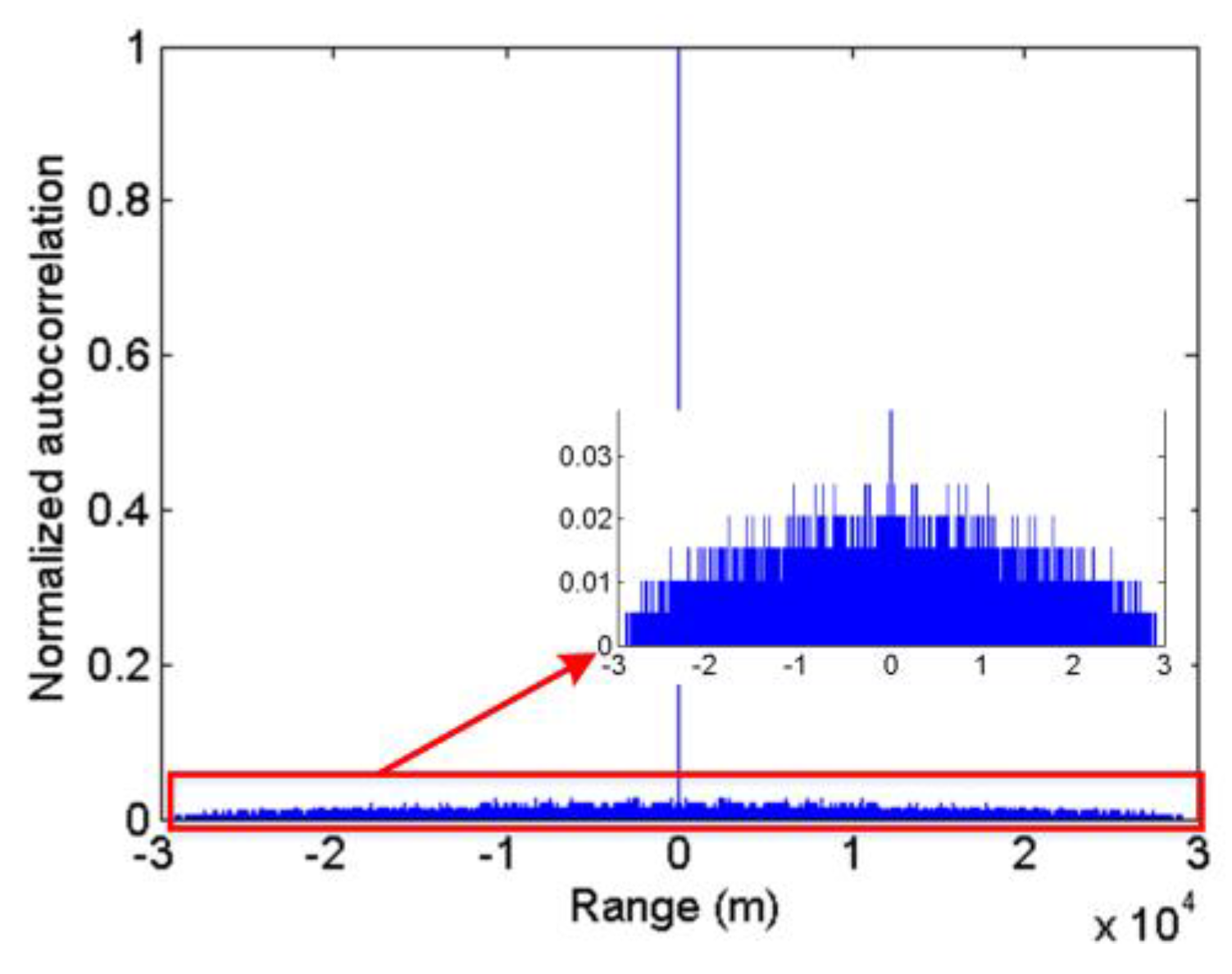
4. Autocorrelation Verification of the True Random Sequence
5. Experiment Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- McCarthy, A.; Collins, R.J.; Krichel, N.J.; Fernández, V.; Wallace, A.M.; Buller, G.S. Long-range time-of-flight scanning sensor based on high-speed time-correlated single-photon counting. Appl. Opt. 2009, 48, 6241–6251. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Degnan, J.J. Scanning, multibeam, single photon LIDARs for rapid, large scale, high resolution, topographic and bathymetric mapping. Remote Sens. 2016, 8, 11. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Huang, X.; Cao, Y.; Wang, B.; Li, Y.; Jin, W.; Yu, C.; Zhang, J.; Zhang, Q.; Peng, C.; et al. Single-photon computational 3D imaging at 45 km. ArXiv: Image Video Process. 2019, 1904, 10341. [Google Scholar]
- Brooks, J.; Faccio, D. A single-shot non-line-of-sight range-finder. Sensors 2019, 19, 21. [Google Scholar] [CrossRef] [Green Version]
- Mita, R.; Palumbo, G. High-speed and compact quenching circuit for single-photon avalanche diodes. IEEE Trans. Instrum. Meas. 2008, 57, 543–554. [Google Scholar] [CrossRef]
- Oh, M.S.; Kong, H.J.; Kim, T.H.; Hong, K.H.; Kim, B.W.; Park, D.J. Time-of-flight analysis of three-dimensional imaging laser radar using a geiger-mode avalanche photodiode. Jpn. J. Appl. Phys 2010, 49, 026601. [Google Scholar] [CrossRef] [Green Version]
- Du, B.; Pang, C.; Wu, D.; Li, Z.; Peng, H.; Tao, Y.; Wu, E.; Wu, G. High-speed photon-counting laser ranging for broad range of distances. Sci. Rep. 2018, 8, 4198. [Google Scholar] [CrossRef] [Green Version]
- Liang, Y.; Huang, J.; Ren, M.; Feng, B.; Chen, X.; Wu, E.; Wu, G.; Zeng, Z. 1550-nm time-of-flight ranging system employing laser with multiple repetition rates for reducing the range ambiguity. Opt. Express 2014, 22, 4662–4670. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Liu, B.; Chen, Z. A macro-pulse photon counting LIDAR for long-range high-speed moving target detection. Sensors 2020, 20, 2204. [Google Scholar] [CrossRef] [Green Version]
- Zheng, T.; Shen, G.; Li, Z.; Yang, L.; Zhang, H.; Wu, E.; Wu, G. Frequency-multiplexing photon-counting multi-beam LIDAR. Photon. Res. 2019, 7, 1381. [Google Scholar] [CrossRef]
- Takeuchi, N.; Sugimoto, N.; Baba, H.; Sakurai, K. Random modulation CW LIDAR. Appl. Opt. 1983, 22, 1382–1386. [Google Scholar] [CrossRef]
- Sun, X.; Abshire, J.B.; Krainak, M.A.; Hasselbrack, W.B. Photon counting pseudorandom noise code laser altimeters. Proc. SPIE 2007, 6771, 677100. [Google Scholar]
- Hiskett, P.A.; Parry, C.S.; Mccarthy, A.; Buller, G.S. A photoncounting time-of-flight ranging technique developed for the avoidance of range ambiguity at gigahertz clock rates. Opt. Express 2008, 16, 13685–13698. [Google Scholar] [CrossRef] [PubMed]
- Krichel, N.J.; Mccarthy, A.; Buller, G.S. Resolving range ambiguity in a photon counting depth imager operating at kilometer distances. Opt. Express 2010, 18, 9192–9206. [Google Scholar] [CrossRef] [PubMed]
- Ullrich, A. A novel range ambiguity resolution technique applying pulse-position modulation in time-of-flight ranging applications. Proc. SPIE 2012, 8389, 83790. [Google Scholar]
- Zhang, Y.Y.; He, F.; Yang, Y.L.; Chen, W. Three-dimensional imaging LIDAR system based on high speed pseudorandom modulation and photon counting. Chin. Opt. Lett. 2016, 14, 111101. [Google Scholar] [CrossRef] [Green Version]
- Yang, F.; Zhang, X.; He, Y.; Chen, W. High speed pseudorandom modulation fiber laser ranging system. Chin. Opt. Lett. 2014, 12, 082801. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Soon, H.W.; Tian, H.; Fernando, S.; Ha, Y.; Chen, N.G. Pseudo-random single photon counting for time-resolved optical measurement. Opt. Express 2008, 16, 13233–13239. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Chen, L.; Chen, N. Pseudo-random single photon counting: A high-speed implementation. Biomed. Opt. Express 2010, 1, 41–46. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Yu, Y.; Chen, Z.; Han, W. True random coded photon counting LIDAR. Opto-Electron. Adv. 2020, 3, 190044. [Google Scholar] [CrossRef]
- Yu, Y.; Liu, B.; Chen, Z. Lmproving the performance of pseudo-random single-photon counting ranging LIDAR. Sensors 2019, 19, 3620. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Du, P.; Geng, D.; Wang, W.; Gong, M. Laser detection of remote targets applying chaotic pulse position modulation. Opt. Eng. 2015, 54, 114102. [Google Scholar] [CrossRef]
- Kumar, S. Autocorrelation function of m-sequence. J. Eur. Opt. Soc. Part B 1998, 2, 287–305. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Dead time | 45 ns/25 ns |
| Wavelength | 1064 nm |
| Pulde width | 1 ns |
| Modulation frequency | 20 MHz (TTL) |
| Single photon detection efficiency | 1.6%/2% |
| Time Resolution of TCSPC Module | 64 ps |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Liu, B.; Chen, Z.; Hua, K. Photon Counting LIDAR Based on True Random Coding. Sensors 2020, 20, 3331. https://doi.org/10.3390/s20113331
Yu Y, Liu B, Chen Z, Hua K. Photon Counting LIDAR Based on True Random Coding. Sensors. 2020; 20(11):3331. https://doi.org/10.3390/s20113331
Chicago/Turabian StyleYu, Yang, Bo Liu, Zhen Chen, and Kangjian Hua. 2020. "Photon Counting LIDAR Based on True Random Coding" Sensors 20, no. 11: 3331. https://doi.org/10.3390/s20113331