Trust Based Multipath QoS Routing Protocol for Mission-Critical Data Transmission in Tactical Ad-Hoc Networks



Abstract
:1. Introduction
1.1. Motivation
1.2. Contributions
- The proposal of a trust-based multipath QoS routing algorithm for enhancing the QoS metrics in tactical ad-hoc networks.
- The trustworthiness and QoS guaranteed owing to the deployment of multipath routing algorithms to meet the mission-critical data requirements.
- The use of a flexible threshold method that considers data usage and link bandwidth for enhancing malicious node detection.
2. Related Work
2.1. Trustworthiness Estimation
2.2. Trust-Based Routing
3. Proposed Scheme
3.1. Performance Requirements For Mission-Critical Data Delivery
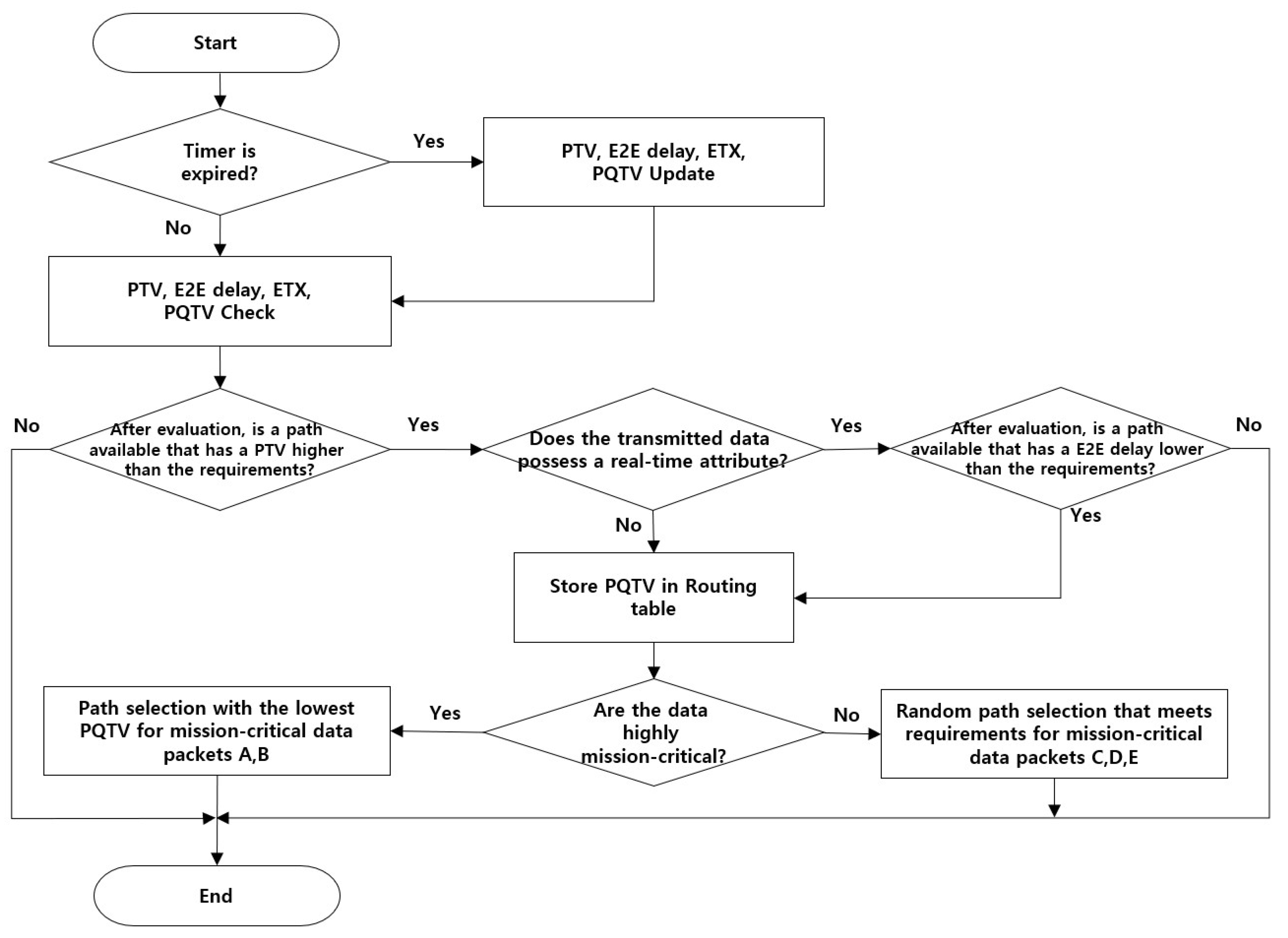
3.2. Trustworthiness and QoS-Based Path Discovery and Selection Procedure
3.3. Maintenance of Trustworthy and QoS-Assured Paths
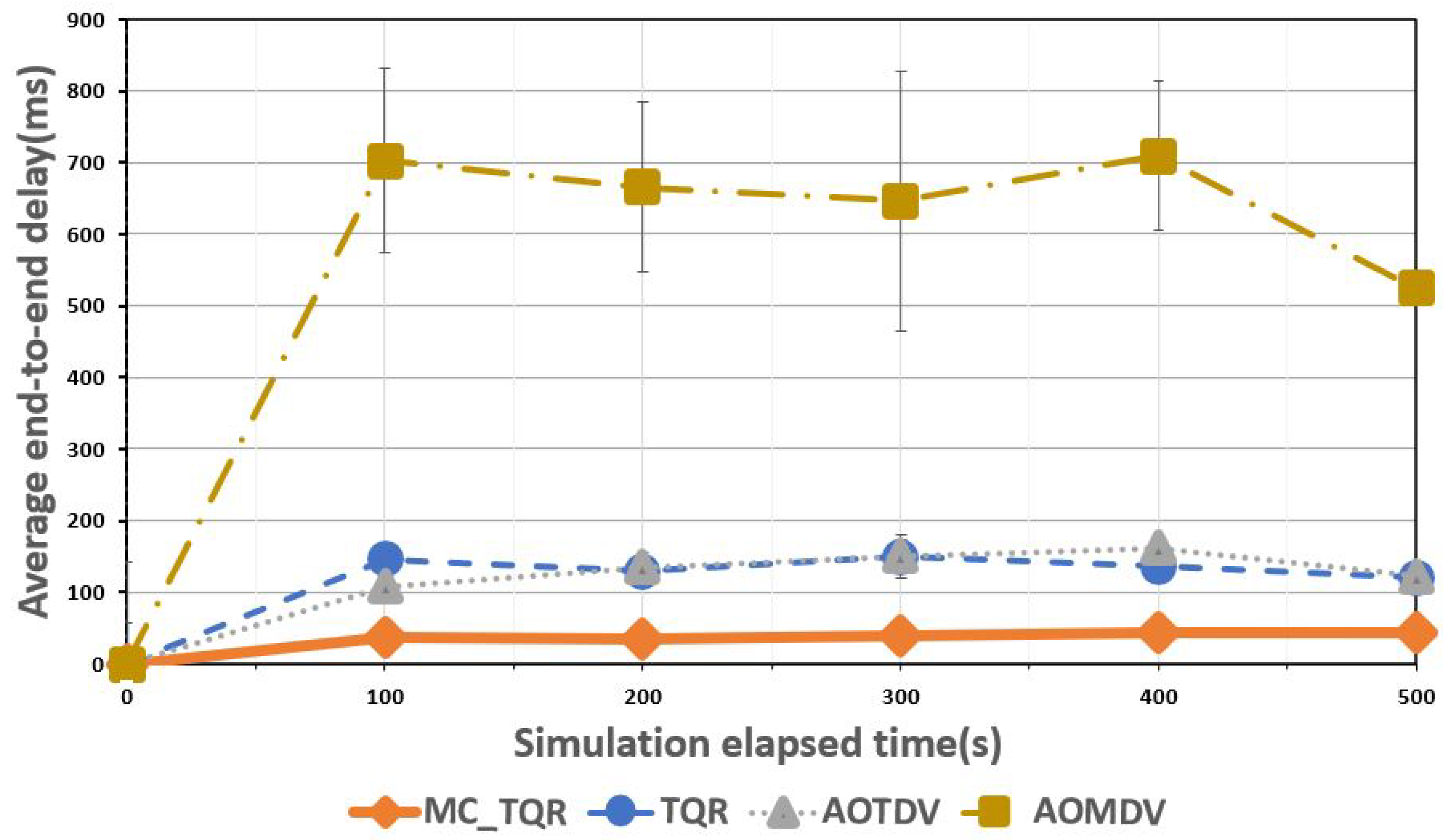
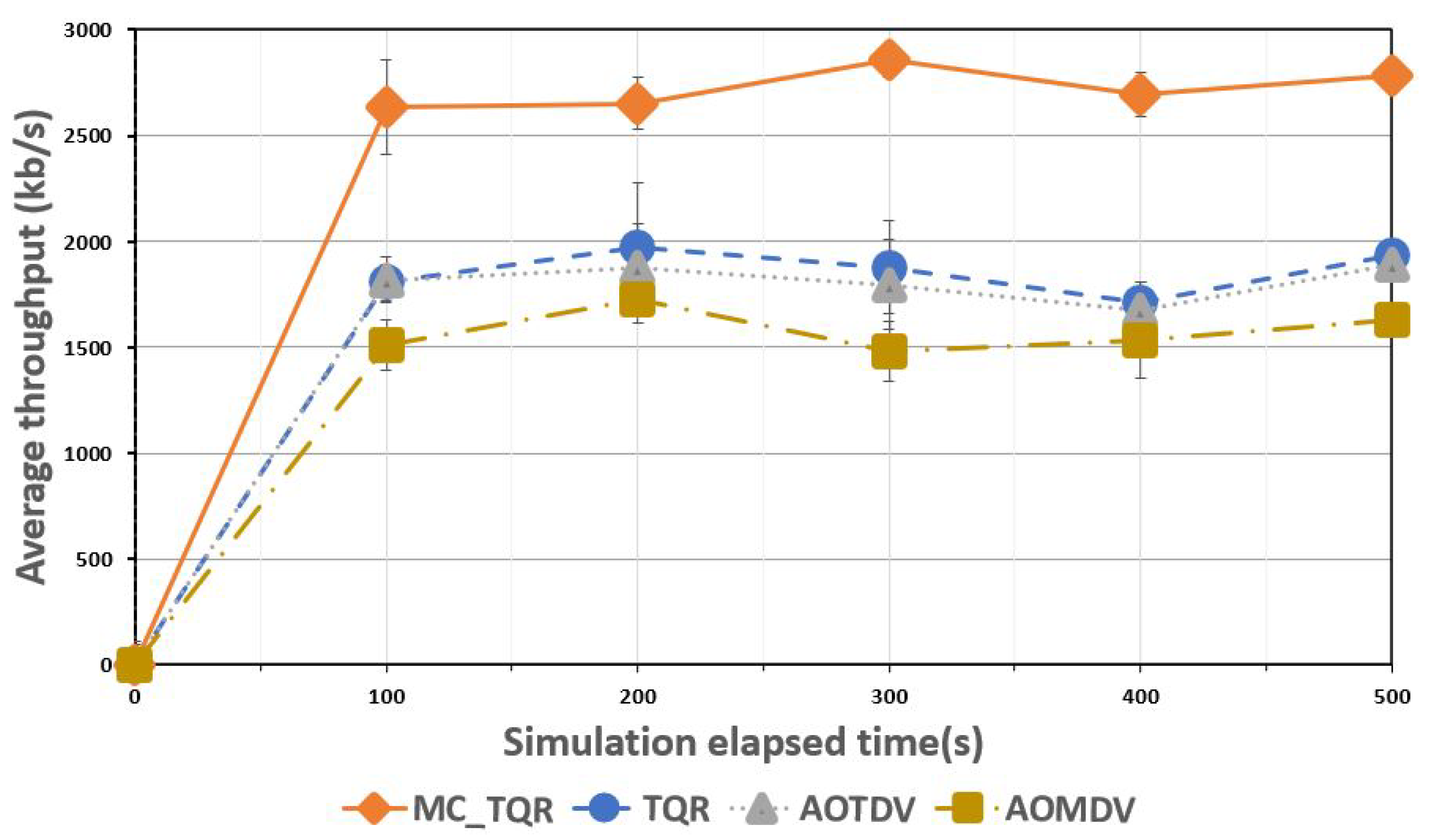
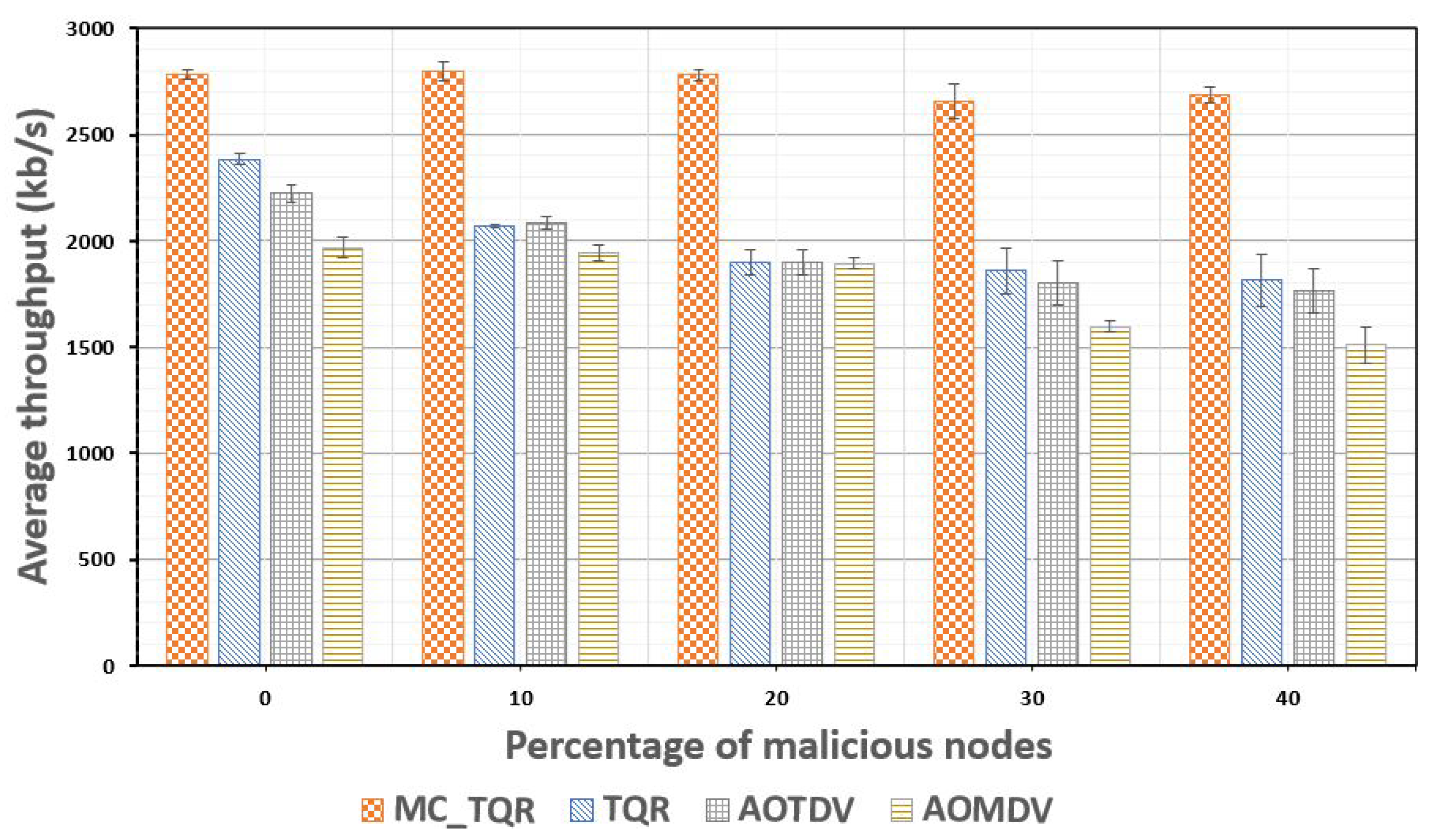
4. Performance Evaluation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- George, I.S. NARO Studying Military IoT Applications. 2018. Available online: https://www.afcea.org/content/Article-nato-studying-military-iot-applications (accessed on 1 March 2017).
- Huang, M.; Liu, A.; Xiong, N.N.; Wang, T.; Vasilakos, A.V. An effective service-oriented networking management architecture for 5G-enabled internet of things. Comput. Netw. 2020, 173, 107208. [Google Scholar] [CrossRef]
- Sun, G.; Zhou, R.; Sun, J.; Yu, H.; Vasilakos, A.V. Energy-efficient provisioning for service function chains to support delay-sensitive applications in network function virtualization. IEEE Internet Things J. 2020. [Google Scholar] [CrossRef]
- Wang, S.; Bi, J.; Wu, J.; Vasilakos, A.V.; Fan, Q. VNE-TD: A virtual network embedding algorithm based on temporal-difference learning. Comput. Netw. 2019, 161, 251–263. [Google Scholar] [CrossRef]
- Nicholas, F. US Army Is Using IoT Tech and Data to Transform Warfare. 2016. Available online: https://internetofbusiness.com/us-army-iot-warfare/ (accessed on 12 April 2018).
- Douglas, D.C.; Daniel, A.; John, B.; Robert, M. High-throughput path metric for multi-hop wireless routing. In Proceedings of the MobiCom ’03: 9th Annual International Conference on Mobile Computing and Networking, San Diego, CA, USA, 14–19 September 2003; pp. 134–146. [Google Scholar] [CrossRef] [Green Version]
- Meng, T.; Wu, F.; Yang, Z.; Chen, G.; Vasilakos, A.V. Spatial reusability-aware routing in multi-hop wireless networks. IEEE Trans. Comput. 2016, 65, 244–255. [Google Scholar] [CrossRef] [Green Version]
- Yen, Y.S.; Chao, H.C.; Chang, R.S.; Vasilakos, A.V. Flooding-limited and multi-constrained QoS multicast routing based on the genetic algorithm for MANETs. Math. Comput. Model. 2011, 53, 2238–2250. [Google Scholar] [CrossRef]
- Asis, N.; Samir, R.D. On-Demand Multipath-Routing for Mobile Ad Hoc Networks. In Proceedings of the Eight International Conference on Computer Communications and Networks, Boston, MA, USA, 11–13 October 1999; pp. 64–70. [Google Scholar]
- Lee, S.J.; Mario, G. Split multipath routing with maximally disjoint paths in ad-hoc network. In Proceedings of the IEEE International Conference on Communications (ICC 2001), Helsinki, Finland, 11–14 June 2001; pp. 3201–3205. [Google Scholar]
- Khalid, N.A.; Bai, Q.; Al-anbuky, A.A. Adaptive trust-based routing protocol for large scale WSNs. IEEE Access 2019, 7, 143539–143549. [Google Scholar] [CrossRef]
- Govindan, K.; Mohapatra, P. Trust computations and trust dynamics in mobile ad-hoc networks: A survey. IEEE Commun. Surv. Tutor. 2012, 14, 279–298. [Google Scholar] [CrossRef]
- Guo, J.; Chen, I.; Tsai, J. A survey of trust computation models for service management in internet of things systems. Comput. Commun. 2017, 97, 1–14. [Google Scholar] [CrossRef]
- Marina, M.K.; Das, S.R. Ad-hoc on-demand multipath distance vector routing. Wirel. Commun. Mob. Comput. 2006, 6, 969–988. [Google Scholar] [CrossRef]
- Perkins, C.E.; Royer, E.M. Ad-hoc on-demand distance vector routing. In Proceedings of the 1999 IEEE Workshop on Mobile Computing Systems and Applications (WMCSA 1999), New Orleans, LA, USA, 25–26 February 1999; pp. 90–100. [Google Scholar]
- Li, X.; Jia, Z.; Zhang, P.; Zhang, R.; Wang, H. Trust-based on-demand multipath routing in mobile ad-hoc networks. IEF Inf. Secur. 2010, 4, 212–232. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Chen, X.; Chang, W. A light-weight trust-based QoS routing algorithm for ad-hoc networks. Pervasive Mob. Comput. 2014, 13, 164–180. [Google Scholar] [CrossRef]
- Tajeddine, A.; Kayssi, A.; Chehab, A.; Elhajj, I.; Itani, W. CENTERA: A centralized trust-based efficient routing protocol with authentication for wireless sensor networks. Sensors 2015, 15, 3299–3333. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kalidoss, T.; Rajasekaran, L.; Kanagasabai, K.; Sannasi, G.; Kannan, A. QoS Aware Trust Based Routing Algorithm for Wireless Sensor Networks. Wirel. Pers. Commun. 2020, 110, 1637–1658. [Google Scholar] [CrossRef]
- Gary, W.B. U.S. Army UC Reference Architecture (RA), Version 1.0. CIO/G-6 Reference Architecture Series. Available online: https://docplayer.net/2665571-U-s-army-unified-capabilities-uc-reference-architecture-ra-version-1-0-11-october-2013.html (accessed on 11 October 2013).
- Teresa, M.T. Unified Capabilities Requirements 2013(UCR 2013). The Office the DoD Chief Information Officer. Available online: https://www.disa.mil/-/media/Files/DISA/Services/UCCO/UCR2013/UCR_2013_Combined.pdf (accessed on 1 January 2013).
- Robert, D. The future combat systems(FCS) overview. In Proceedings of the IEEE Military Communications Conference (MILCOM 2005), Atlantic City, NJ, USA, 17–20 October 2005; pp. 1–5. [Google Scholar]
- Duan, J.; Yang, D.; Zhu, H.; Zhang, S.; Zhao, J. TSRF: A trust-aware secure routing framework in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2014, 3, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Muralidharan, S.; Roy, A.; Saxena, N. MDP-IoT: MDP based interest forwarding for heterogeneous traffic in IoT-NDN environment. Future Gener. Comput. Syst. 2018, 79, 892–908. [Google Scholar] [CrossRef]
- Zheng, D.; Carter, W. Leveraging the Internet of Things for a More Efficient and Effective Military; Center for Strategic & International Studies (CSIS): Washington, DC, USA, 2015. [Google Scholar]
- Marwick, M.S.; Kramer, C.M.; Laprade, E.J. Analysis of Soldier Radio Waveform Performance in Operational Test; Institute for Defense Analyses: Alexandria, VA, USA, 2015. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission Critical Level | FCS Traffic | Data Type | E2EDelay Requirement | Time Attribute | Priority/Precedence | PHB |
|---|---|---|---|---|---|---|
| A | Collaborate C2 | Voice | 220 ms | Real-time | FO | EF |
| Fire request | ||||||
| Medical status | ||||||
| B | Collaborate C2 | Video | 220 ms | Real-time | FO, F, I, P, R | AF4 |
| Situation awareness | ||||||
| C | Situation awareness | Chat | 300 ms | Non-Real | FO, F, I, P, R | AF3 |
| D | Damage assessment | Short messaging, sensor data | 1000 ms | Non-Real | FO, F, I, P, R | AF2 |
| Sensor tasking | ||||||
| E | Terrain data | Bulk data | 300 ms | Non-Real | Not Applicable | BE |
| Level | NTV | Meaning |
|---|---|---|
| 1 | [0.9, 1] | Trustworthy node |
| 2 | [0.75, 0.9] | Less trustworthy node |
| 3 | [, 0.75] | Suspect node |
| 4 | [0, ] | Malicious node |
| Level | PTV | Meaning |
|---|---|---|
| 1 | [0.9, 1] | Extremely important data |
| 2 | [0.75, 0.9] | Important data |
| 3 | [0.65, 0.75] | Less important data |
| Parameters | Values |
|---|---|
| Simulator | OPNET 18.0 |
| Simulation time | 500 s |
| Routing Protocols | AOMDV, AOTDV, TQR, MC-TQR |
| Number of nodes | 50 |
| Percentage of malicious nodes | 0–40% |
| Traffic type | VoIP G.723.1 (24 bytes) |
| Video surveillance H.264 (500 bytes) | |
| Lighting sensor, chat (100 bytes) | |
| Fire alarm, health sensor, message (120 bytes) | |
| CCTV camera, bulk data (2000 bytes) | |
| MAC | CSMA/CA |
| PHY | 802.11b (2Mbps) |
| 0.5 | |
| 0.5 | |
| 0.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Keum, D.; Lim, J.; Ko, Y.-B. Trust Based Multipath QoS Routing Protocol for Mission-Critical Data Transmission in Tactical Ad-Hoc Networks. Sensors 2020, 20, 3330. https://doi.org/10.3390/s20113330
Keum D, Lim J, Ko Y-B. Trust Based Multipath QoS Routing Protocol for Mission-Critical Data Transmission in Tactical Ad-Hoc Networks. Sensors. 2020; 20(11):3330. https://doi.org/10.3390/s20113330
Chicago/Turabian StyleKeum, DooHo, Jihun Lim, and Young-Bae Ko. 2020. "Trust Based Multipath QoS Routing Protocol for Mission-Critical Data Transmission in Tactical Ad-Hoc Networks" Sensors 20, no. 11: 3330. https://doi.org/10.3390/s20113330