Two-Dimensional Frontier-Based Viewpoint Generation for Exploring and Mapping Underwater Environments

 , , , and
, , , and
Abstract
:1. Introduction
- Frontier-based (FB) exploration. Frontier-based methods guide the exploration by focusing on the regions between known an unknown space. This idea was first proposed by Yamauchi [4]. The exploration is guided according to interesting regions in the map. However, the sensor fields of view (FOV) is usually not taken explicitly into account. Furthermore, if the target frontier is the boundary between known and unknown space, as done in the original and many other publications, the robot has a tendency to navigate in a straight line exploring as much as possible until something is reached. This behavior is desirable for indoor exploration, but it is not appropriate for underwater exploration because the robot will only explore open water unless some limits are specified.
- View planning (VP). View planning algorithms evaluate different candidate viewpoints to determine the actions that the robot must perform. A viewpoint is commonly defined as a particular configuration of robot/sensors. When performing CPP the best route that explores all viewpoints is commonly found by solving a variant of the art gallery problem (AGP) and the traveling salesman problem (TSP). In contrast, robotic exploration algorithms based on VP usually use the next-best-view (NBV) approach, where the next best viewpoint is planned online according to the current map and robot location. The first example of VP using the NBV approach was developed by Connolly [5]. One of the advantages of VP algorithms is that they are explicitly aware of the sensor FOV. However, since usually there is an infinite amount of possible viewpoints it is difficult to select them for their evaluation. For this reason, it is common to generate the viewpoints randomly or to reduce the amount of possible viewpoints according to the specific problem. Furthermore, to properly evaluate a viewpoint it is sometimes necessary to use a ray-casting approach, which might be too slow for online computation.
- Reactive algorithms (RAs). Reactive algorithms, such as control-based approaches, can also be used for robotic exploration as done in McEwen et al. [6]. Even potential fields can be used for robotic exploration [7]. They provide a simple framework which is easy to implement, but they suffer from local minima problems, and it is difficult to precisely account for the FOV of the sensors during planning.
2. Related Work
2.1. Methods That Use a Prior Map
2.2. Methods That Do Not Use a Prior Map
3. Frontier-Based Viewpoint Generation Method for Exploration
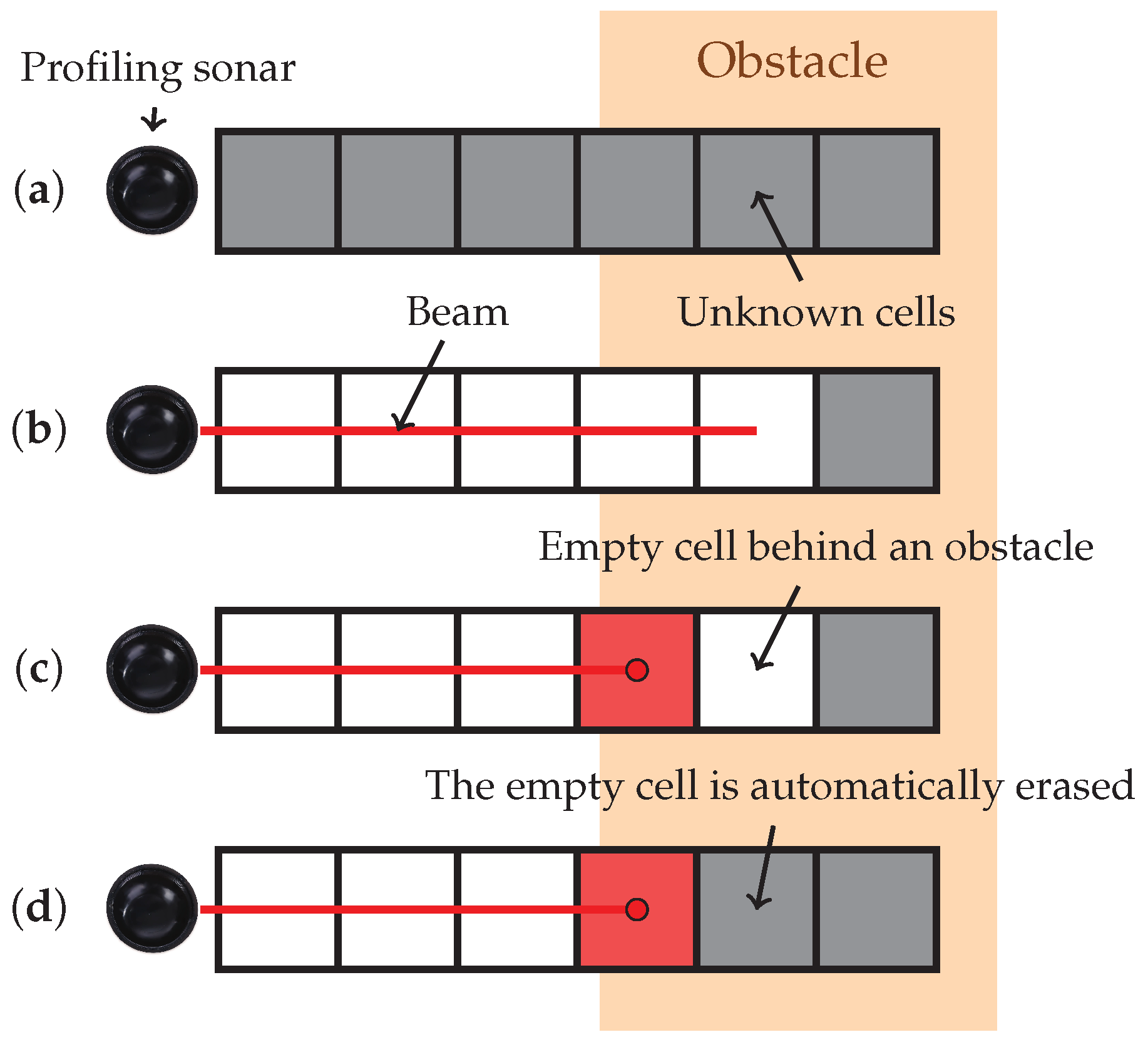
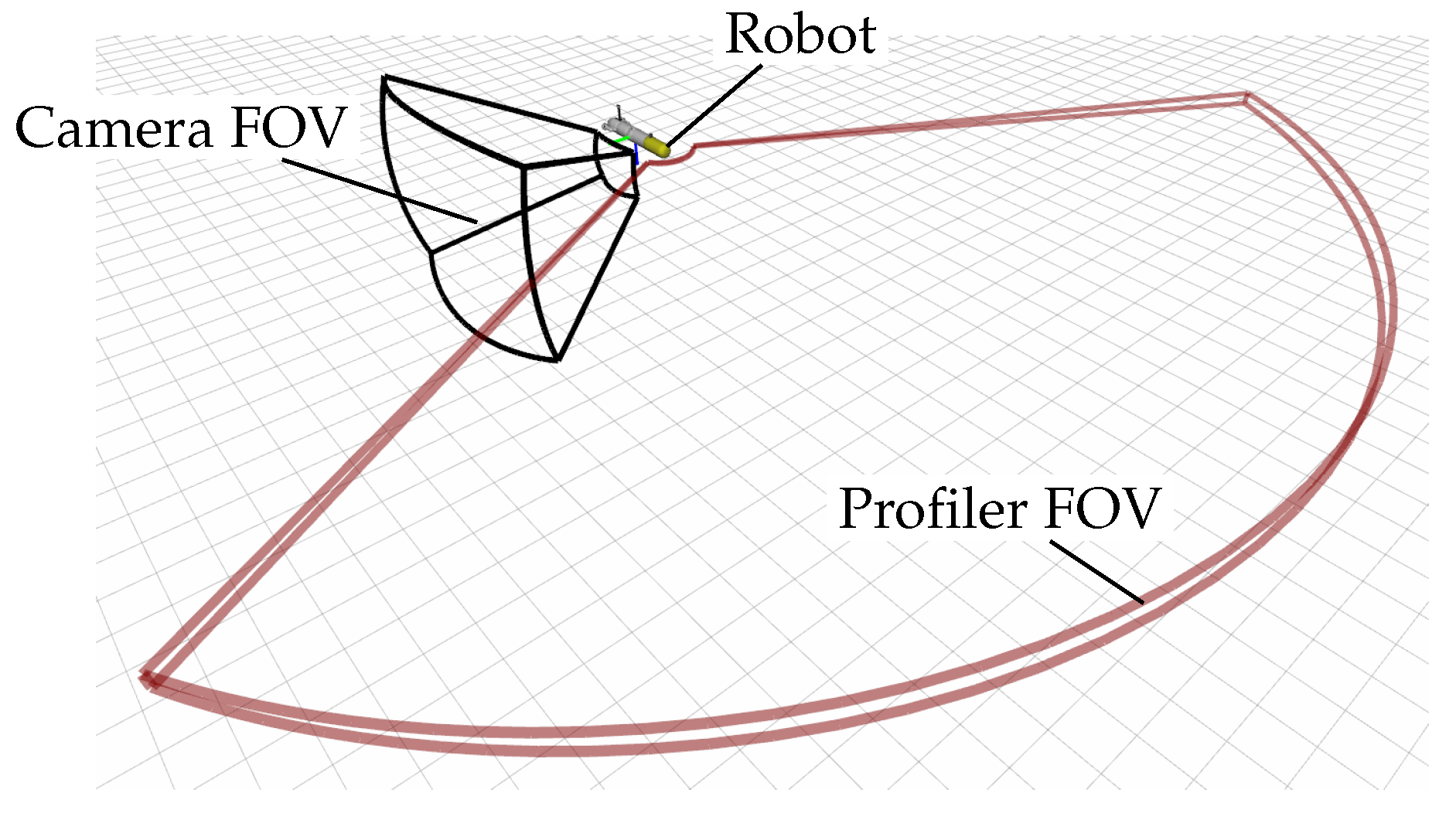
- Occupancy data: a mechanically scanning profiling sonar is used to obtain occupancy data from the environment. This kind of sonar sensors mechanically rotate a narrow acoustic beam in order to measure ranges from different orientations. Since the beam rotates along one axis, the field of view covers a user defined sector from a plane. A scan usually takes several seconds to be obtained.
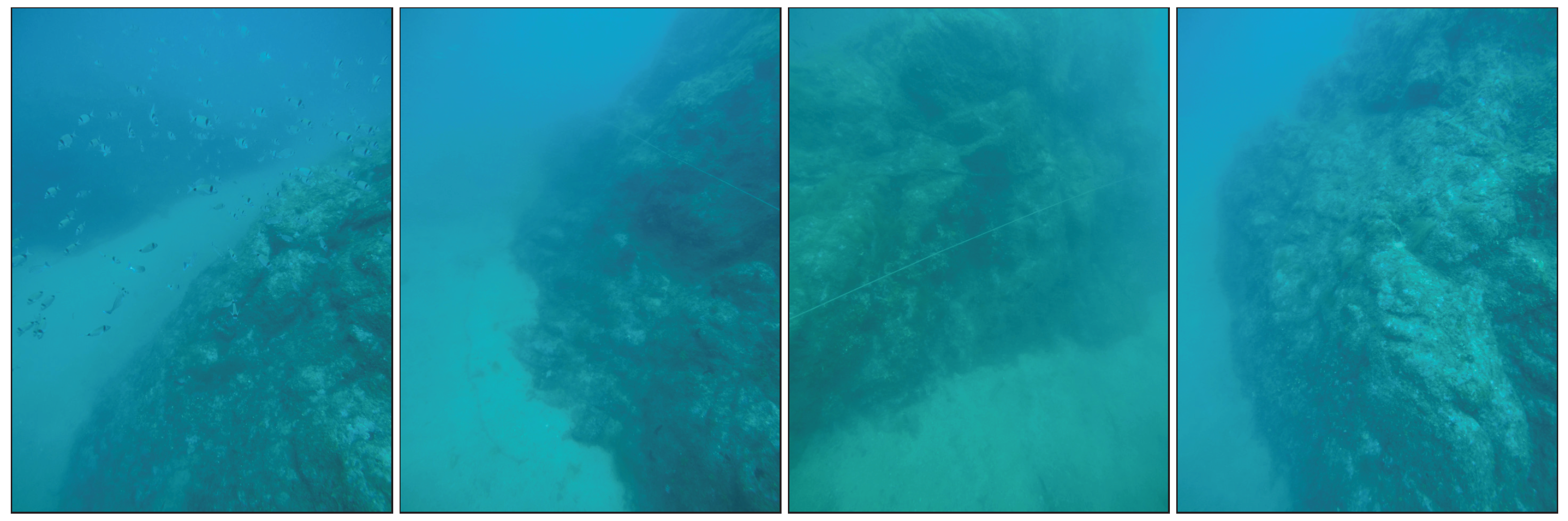
- Optical data: a camera acquires images from the environment. The exploration algorithm does not use the images so no live feedback from the camera is required. Only an estimation of its FOV is used for exploration planning purposes.
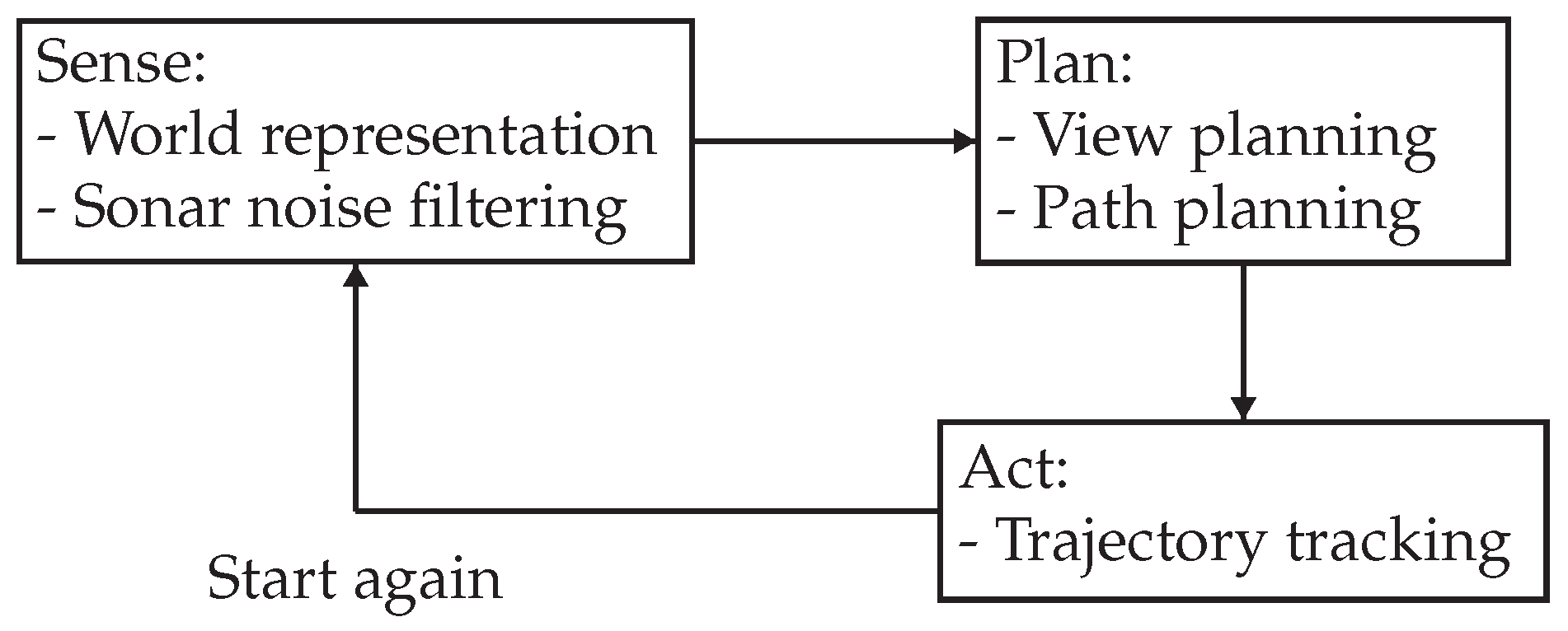
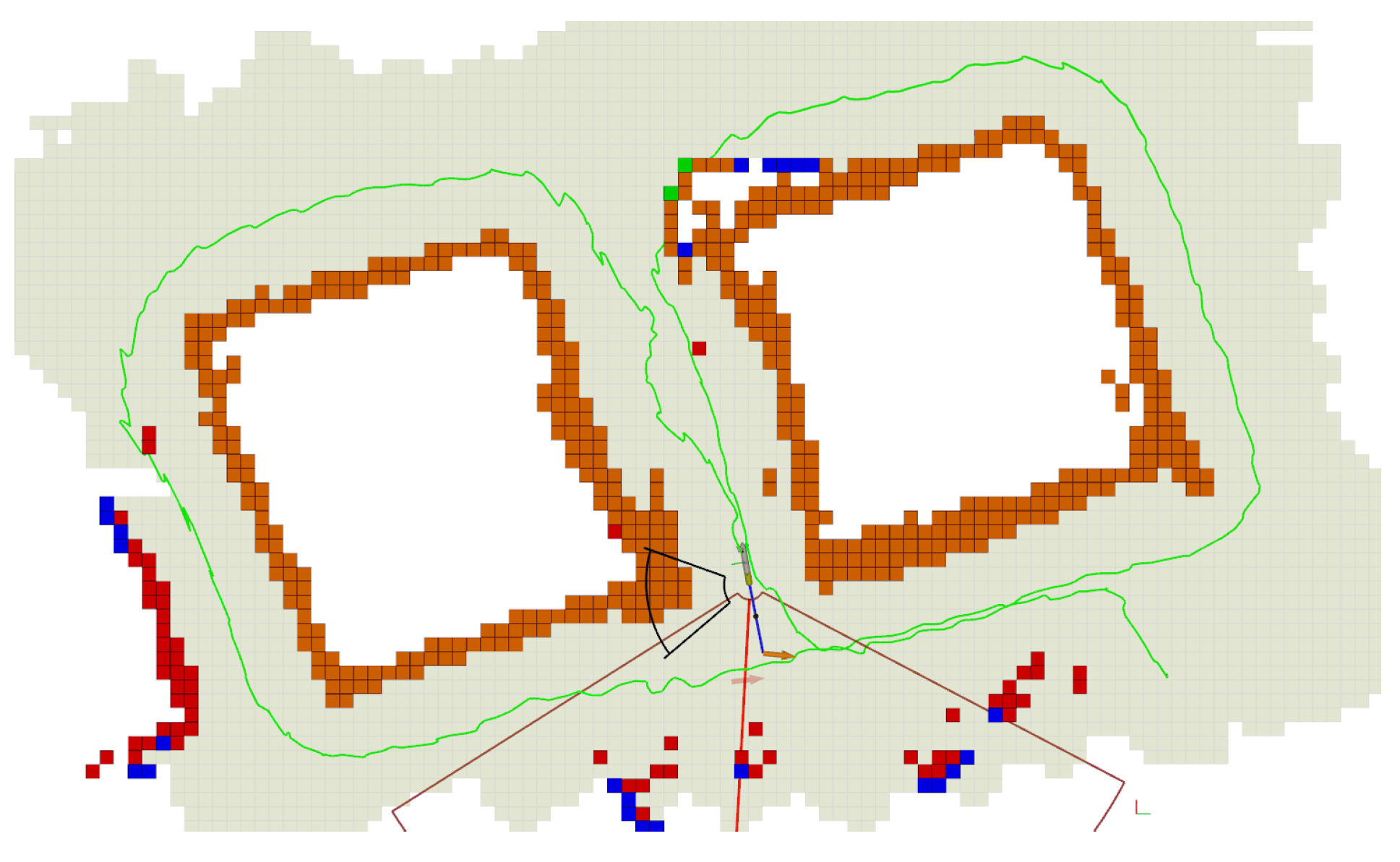
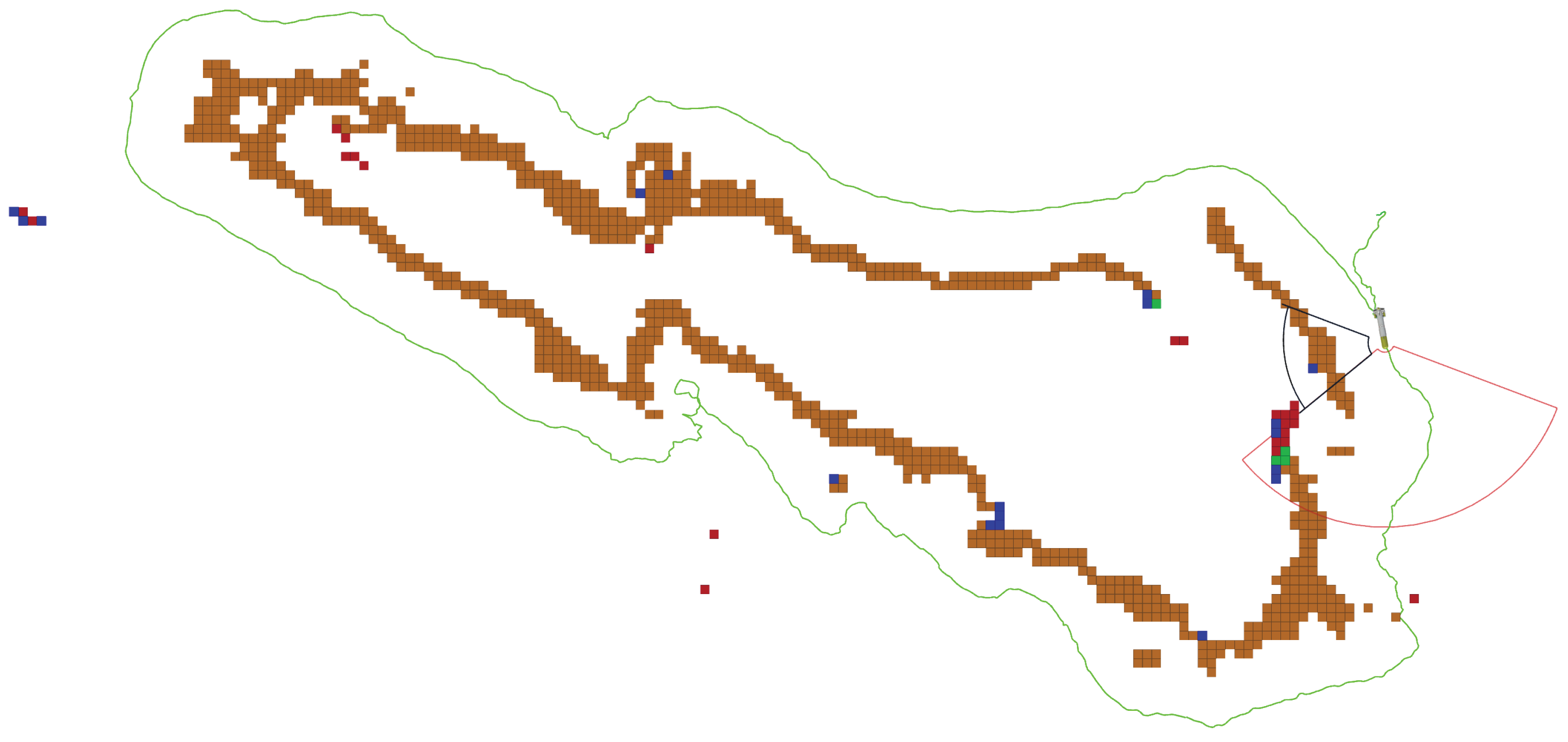
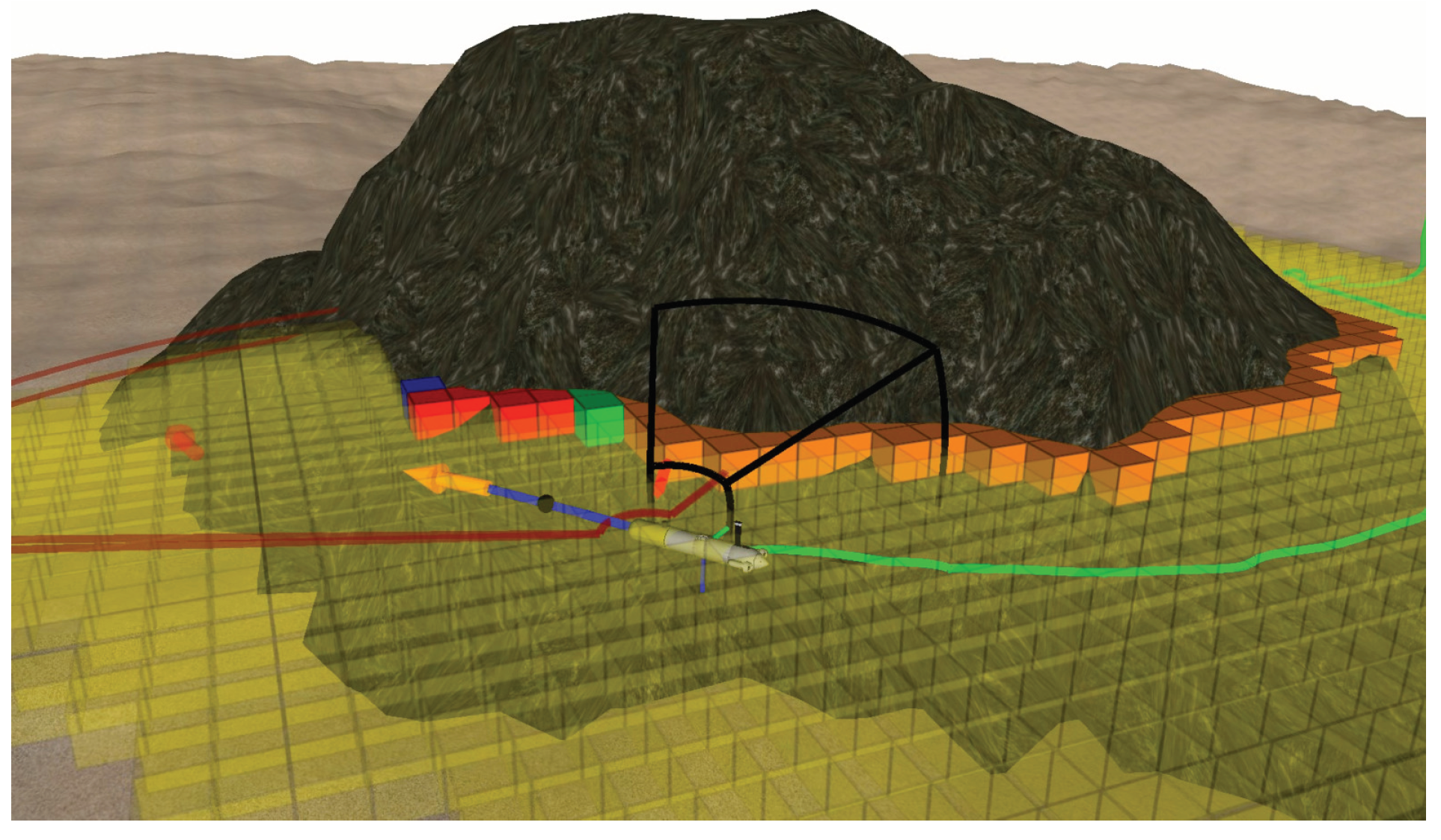
3.1. World Representation (Sense)
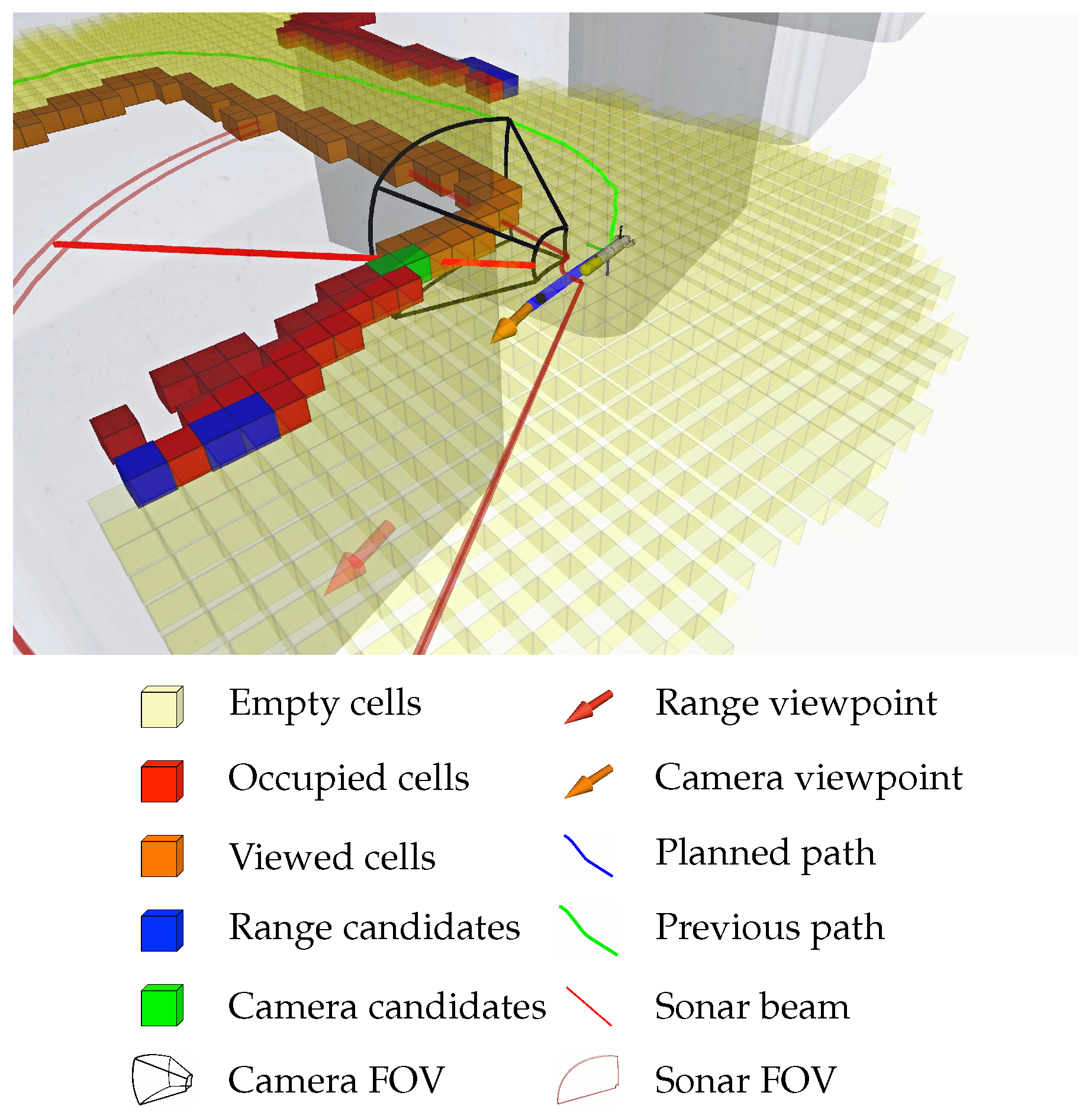
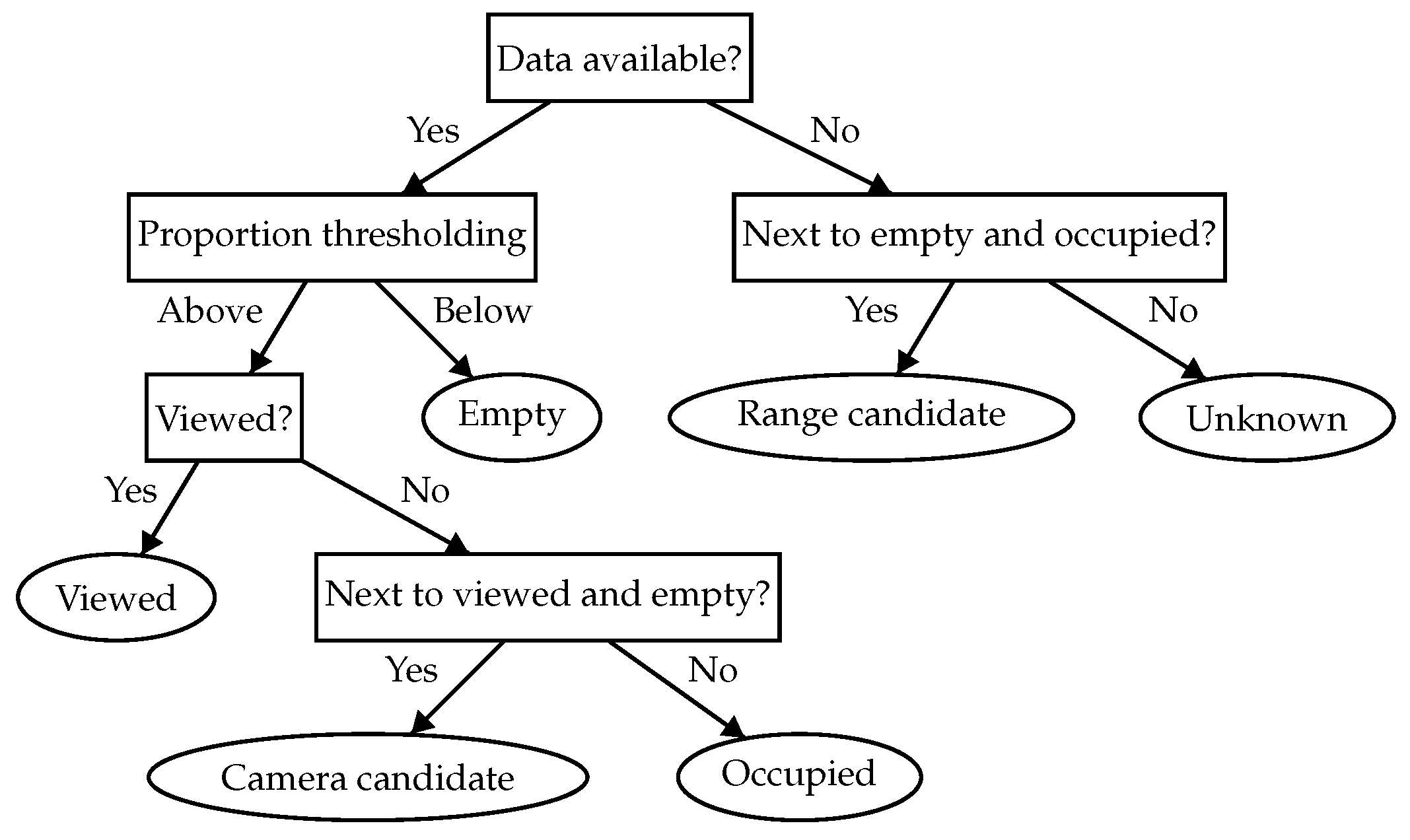
- Unknown cells. The environment is initially assumed to be unknown. Thus, this is the initial state label for all cells in the map.
- Empty cells. They represent collision-free areas where the vehicle can navigate.
- Occupied cells. They correspond to the areas where the profiling sonar has detected an obstacle. They represent walls and objects in the environment.
- Viewed cells. The occupied cells that have been inside the camera FOV are labeled as viewed.
- Range candidate cells. The unknown cells that are next to empty and occupied cells are range candidate cells because they represent regions of potential interest to continue the occupancy exploration.
- Camera candidate cells. The occupied cells that are next to empty and viewed cells are camera candidate cells because they represent the areas that should be optically explored.
- Nearest neighbors and k-nearest neighbors queries. For any specific target cell, it is possible to find the nearest cell or cells of a particular label.
- Range queries. For any specific target cell, it is possible to find all the cells within a certain distance for cells of a particular label.
3.2. Sonar Noise Filtering (Sense)
- When the measurement is close to the minimum and maximum range of the sensor.
- When the measurement corresponds to a location near the water surface.
- When the vehicle is not stable or moving fast.
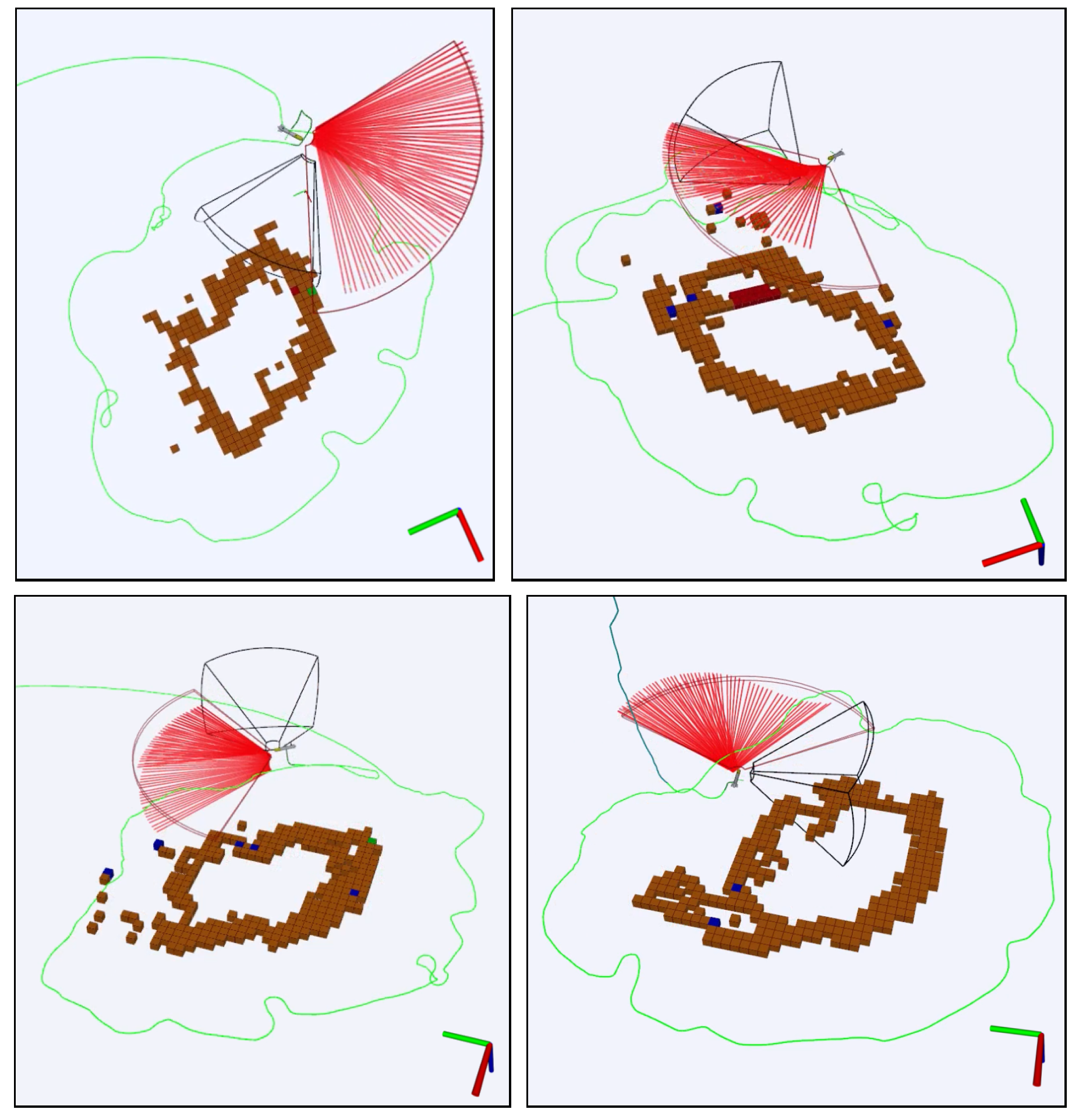
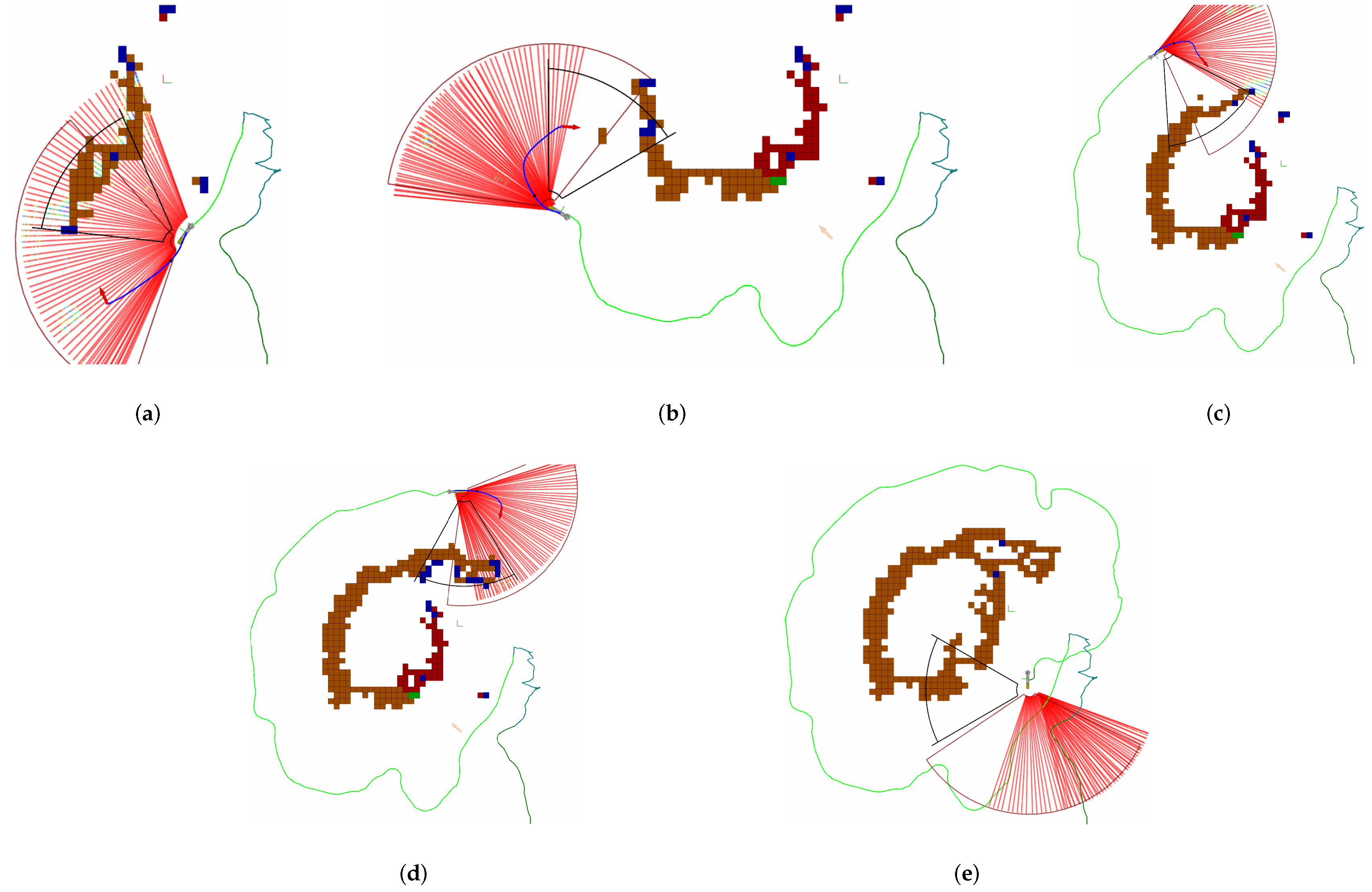
3.3. View Planning (Plan)
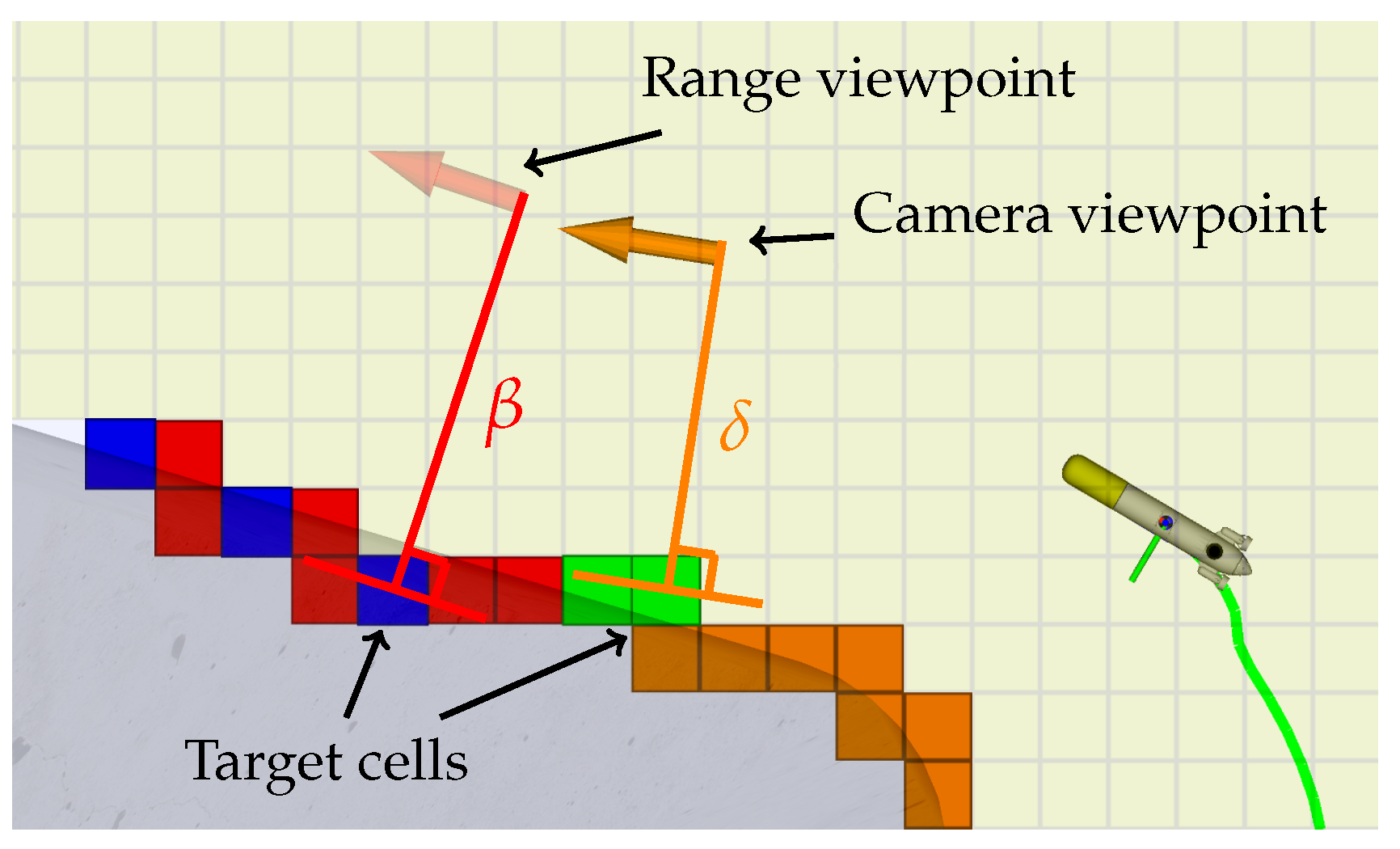
- Range viewpoints. Each range candidate cell in the map potentially generates a range viewpoint. Range viewpoints allow the exploration of the environment using the scanning profiling sonar, as they are focused on the frontier between occupied and unknown regions.
- Camera viewpoints. Camera candidate cells represent the frontier between optically explored and unexplored areas, and they potentially generate camera viewpoints.
- The surface normal is computed using as a reference the occupied and viewed cells around the candidate cell.
- The viewpoint is placed along the surface normal at a user defined distance, which must account for the sensor FOV.
- If the generated viewpoint is inside an empty cell it is stored for further evaluation. Otherwise, it is discarded.
3.4. Path Planning (Plan)
- Shorter paths are preferred.
- Paths that navigate far from the obstacles are preferred.
3.5. Trajectory Tracking (Act)
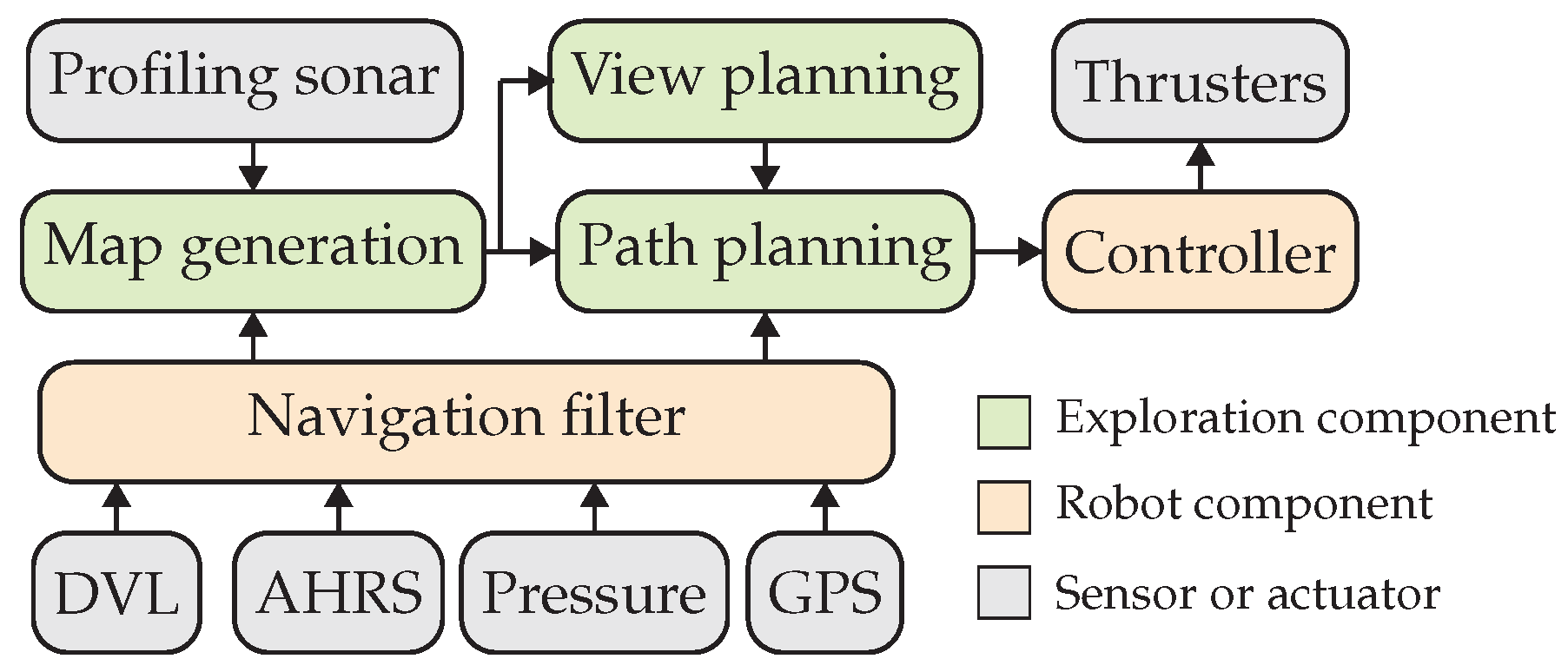
3.6. Summary of the Algorithm
| Algorithm 1: Exploration methodology |
| Input: Range measurements, robot position. Output: Exploration trajectory, map.  |
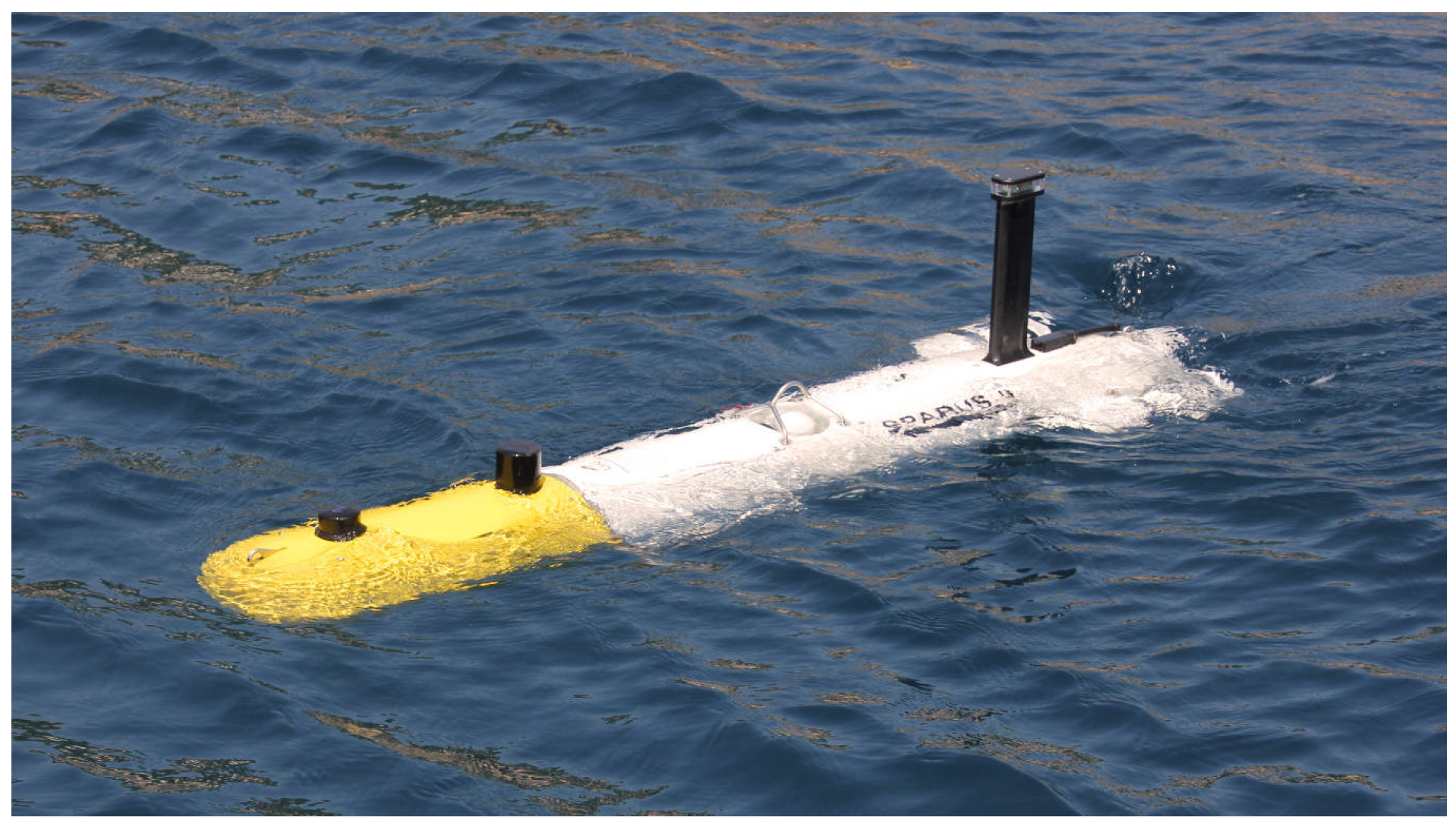
4. Experimental Platform
5. Experimental Outcomes
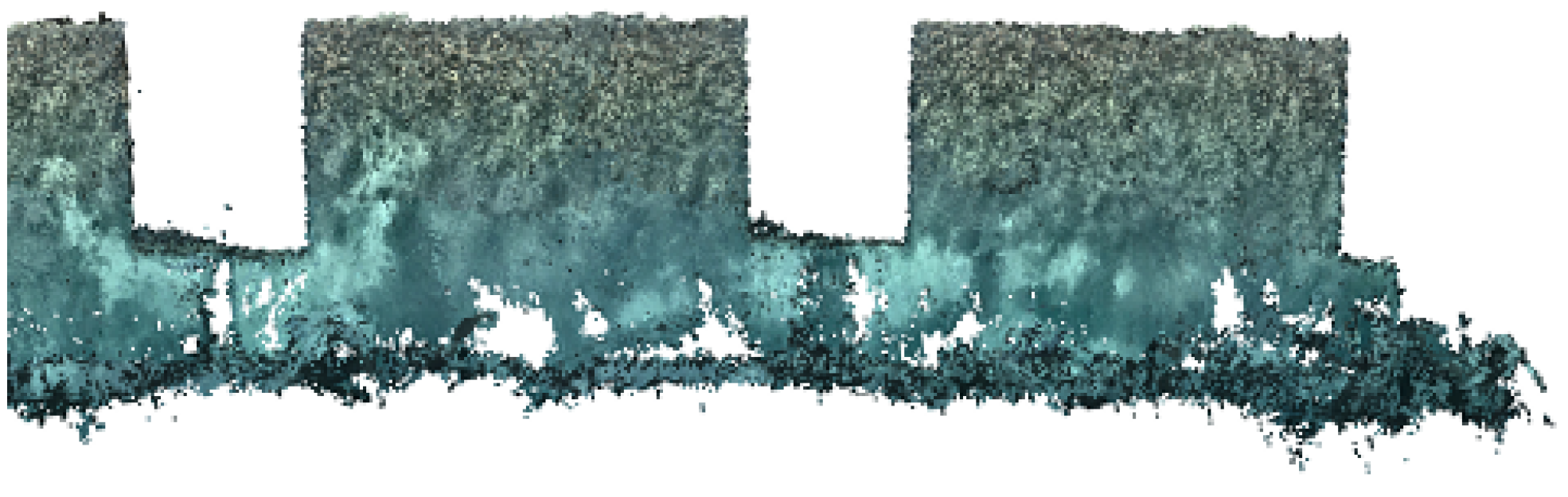
5.1. Breakwater Blocks
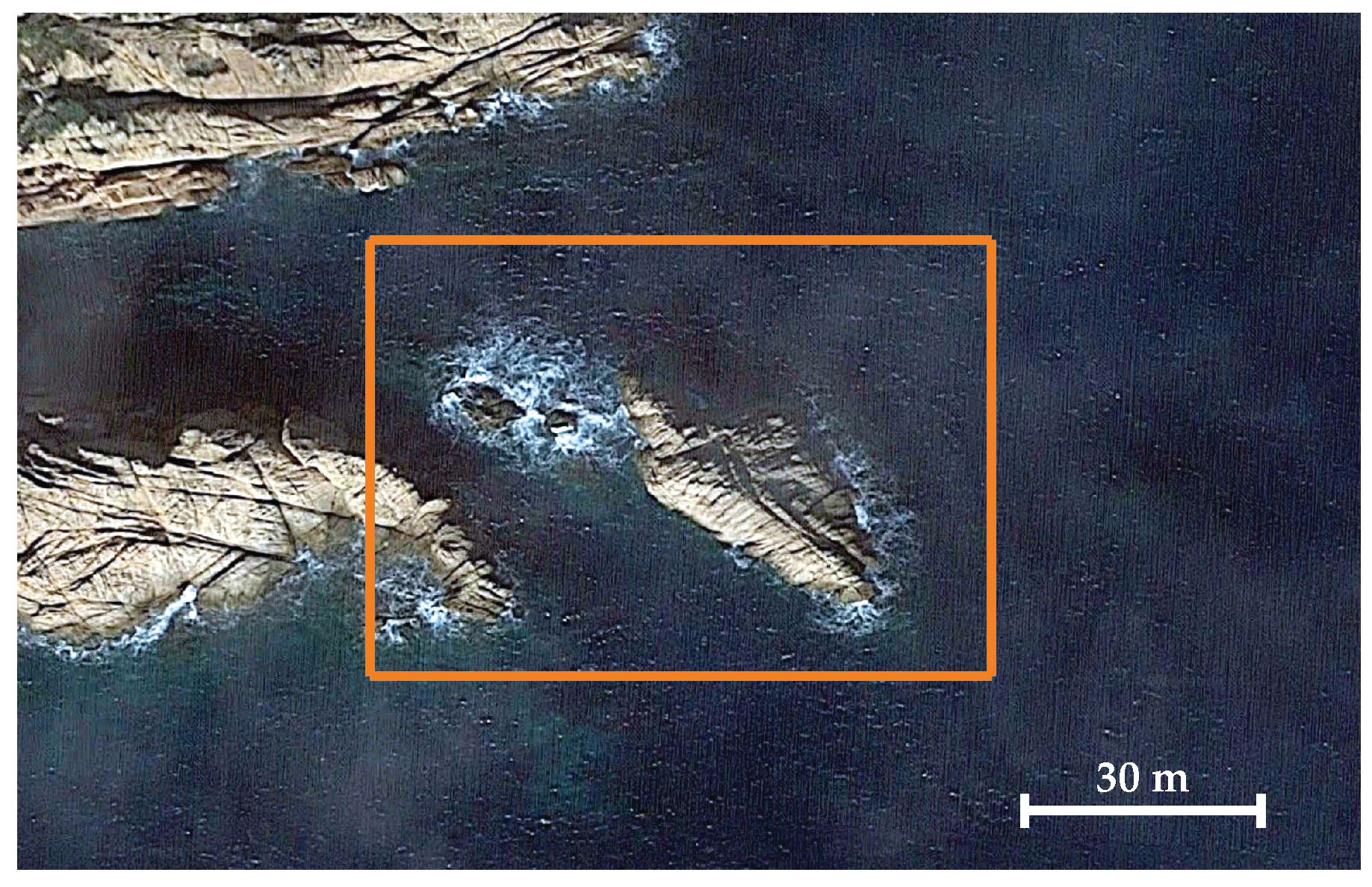
5.2. Punta del Molar
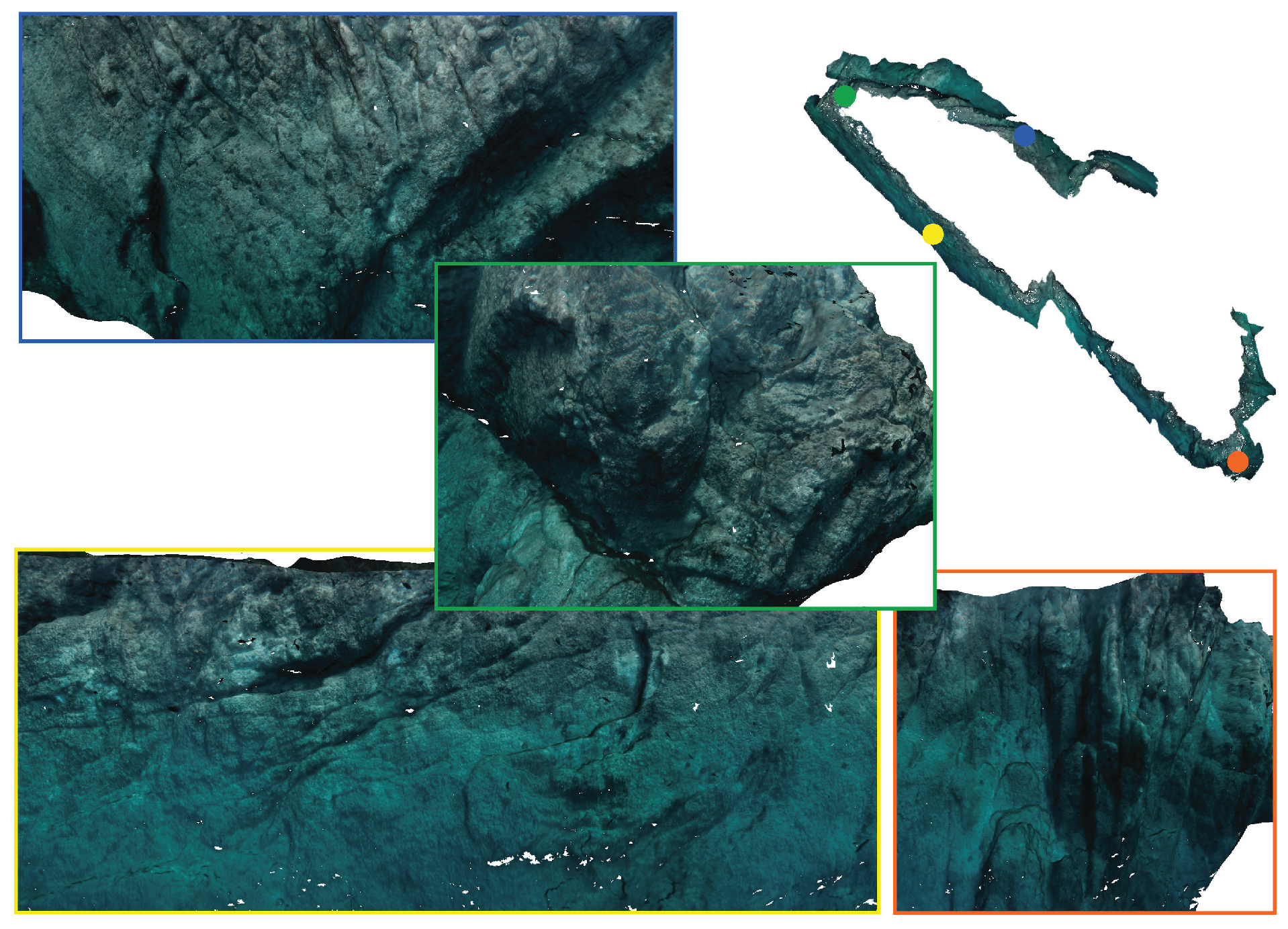
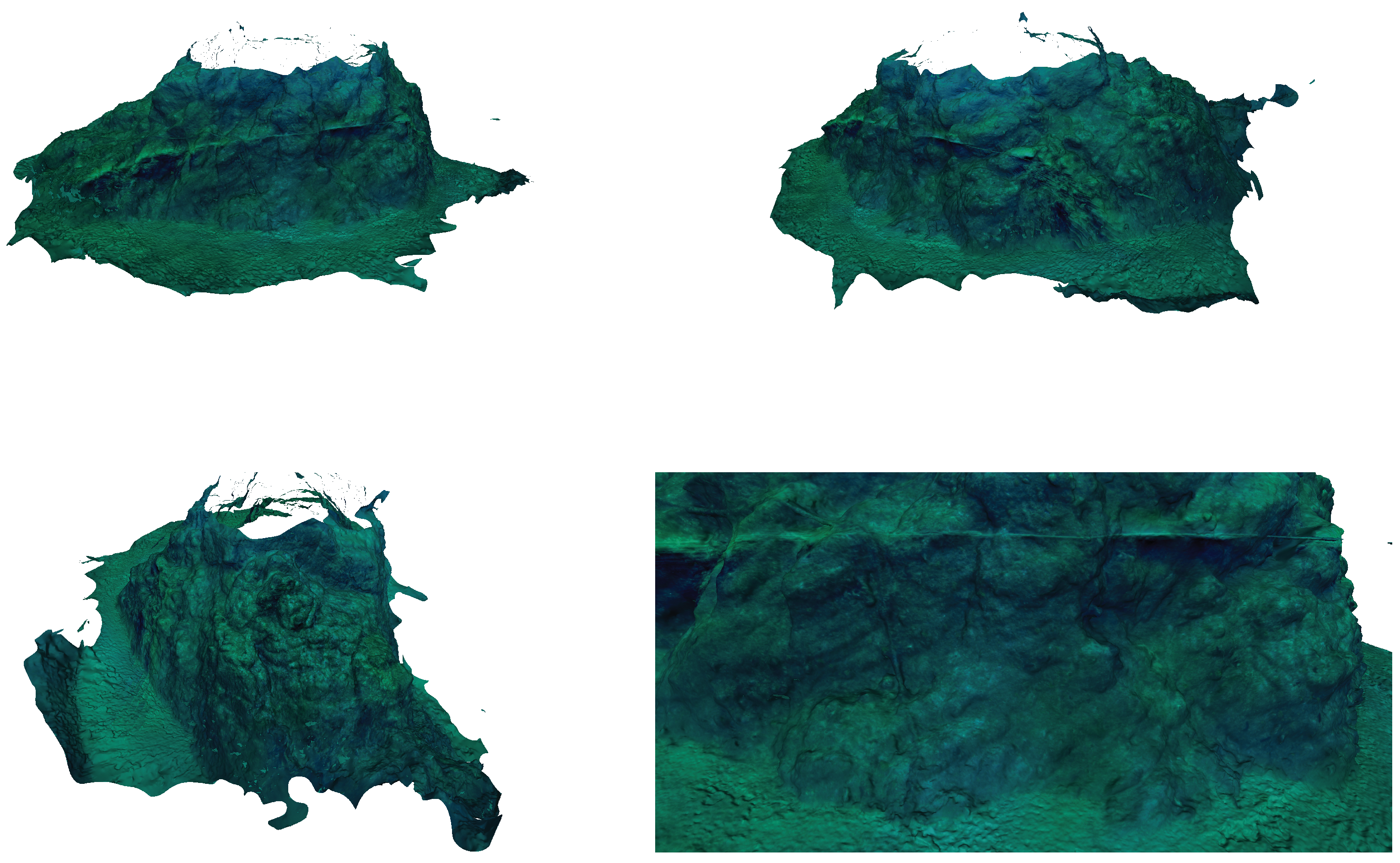
5.3. Amarrador Seamount
- The robot navigates to the diving location, which is located at a distance from the target.
- The robot dives to the desired exploration depth.
- The robot performs a spiral maneuver around the expected underwater boulder location to localize the structure.
- When the sonar detects the structure, the proposed robotic exploration algorithm is triggered.
- The exploration finishes once the map is complete or when a timeout has expired.
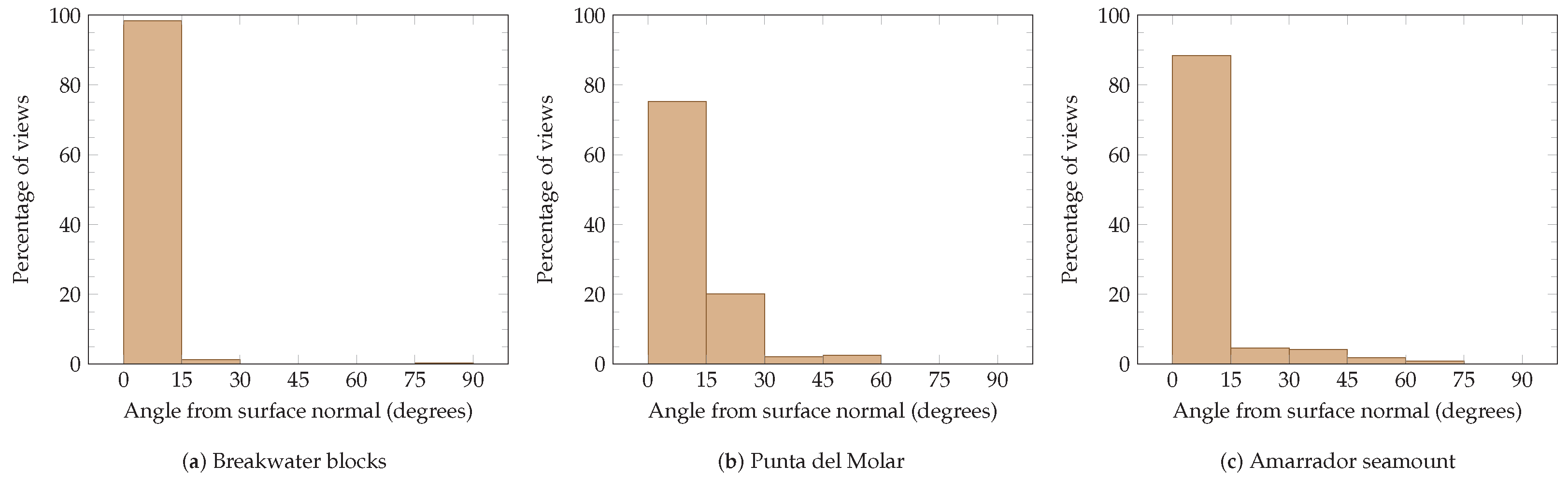
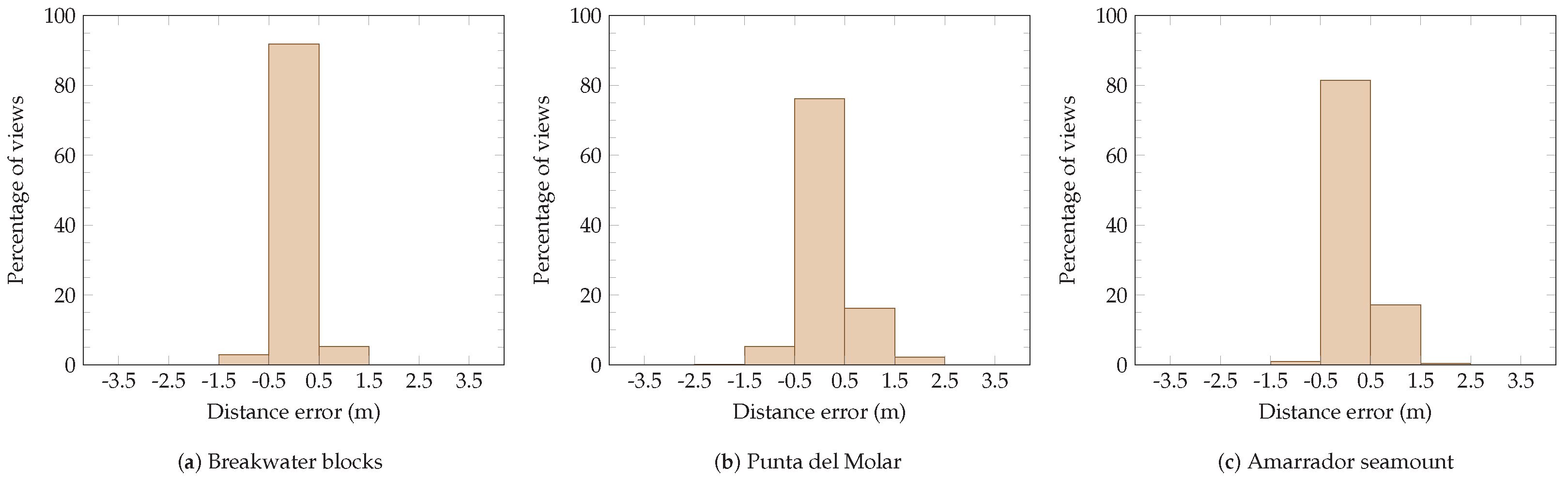
5.4. Quantitative Evaluation
6. Conclusions and Further Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | 2-dimensional |
| 2.5D | 2.5-dimensional |
| 3D | 3-dimensional |
| AGP | art gallery problem |
| AHRS | attitude and heading reference system |
| AUV | autonomous underwater vehicle |
| AUVs | autonomous underwater vehicles |
| CIRS | underwater robotics research center |
| CPP | coverage path planning |
| DOF | degree of freedom |
| DOFs | degrees of freedom |
| DVL | Doppler velocity log |
| FB | frontier-based |
| FOV | field of view |
| FOVs | fields of view |
| GPS | global positioning system |
| ICS | inevitable collision state |
| ICSs | inevitable collision states |
| LOS | line of sight |
| MAV | micro aerial vehicle |
| MAVs | micro aerial vehicles |
| NBV | next-best-view |
| OMPL | open motion planning library |
| PDN | perception-driven navigation |
| PID | proportional-integral-derivative |
| RA | reactive algorithm |
| RAs | reactive algorithms |
| ROS | robot operating system |
| ROV | remotely operated vehicle |
| ROVs | remotely operated vehicles |
| RIG | rapidly-exploring information gathering |
| RRT | rapidly-exploring random tree |
| RRT* | asymptotic optimal rapidly-exploring random tree |
| SAS | synthetic aperture sonar |
| SLAM | simultaneous localization and mapping |
| TSP | traveling salesman problem |
| UAV | unmanned aerial vehicle |
| UAVs | unmanned aerial vehicles |
| UdG | university of Girona |
| UGV | unmanned ground vehicle |
| UGVs | unmanned ground vehicles |
| USBL | ultra-short baseline |
| VICOROB | computer vision and robotics group |
| VP | view planning |
References
- Hover, F.S.; Eustice, R.M.; Kim, A.; Englot, B.J.; Johannsson, H.; Kaess, M.; Leonard, J.J. Advanced Perception, Navigation and Planning for Autonomous In-Water Ship Hull Inspection. Int. J. Robot. Res. 2012, 31, 1445–1464. [Google Scholar] [CrossRef]
- Johnson-Roberson, M.; Pizarro, O.; Williams, S.B.; Mahon, I. Generation and visualization of large-scale three-dimensional reconstructions from underwater robotic surveys. J. Field Robot. 2010, 27, 21–51. [Google Scholar] [CrossRef]
- Ridao, P.; Carreras, M.; Ribas, D.; Sanz, P.J.; Oliver, G. Intervention AUVs: The Next Challenge. IFAC Proc. Vol. 2014, 47, 12146–12159. [Google Scholar] [CrossRef] [Green Version]
- Yamauchi, B. A frontier-based approach for autonomous exploration. In Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation (CIRA), Monterey, CA, USA, 10–11 July 1997; IEEE Computer Society Press: Washington, DC, USA, 1997; pp. 146–151. [Google Scholar]
- Connolly, C.I. The Determination of next best views. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), St. Louis, MO, USA, 25–28 March 1985; Volume 2, pp. 432–435. [Google Scholar]
- McEwen, R.S.; Rock, S.P.; Hobson, B. Iceberg Wall Following and Obstacle Avoidance by an AUV. In Proceedings of the Autonomous Underwater Vehicles 2018, AUV 2018, Porto, Portugal, 6–9 November 2018. [Google Scholar]
- Renzaglia, A.; Martinelli, A. Potential field based approach for coordinate exploration with a multi-robot team. In Proceedings of the 8th IEEE International Workshop on Safety, Security, and Rescue Robotics, SSRR-2010, Bremen, Germany, 26–30 July 2010. [Google Scholar] [CrossRef]
- Vidal, E.; Hernández, J.D.; Istenič, K.; Carreras, M. Online View Planning for Inspecting Unexplored Underwater Structures. IEEE Robot. Autom. Lett. 2017, 99, 1436–1443. [Google Scholar] [CrossRef]
- Vidal, E.; Hernández, J.D.; Istenič, K.; Carreras, M. Optimized Environment Exploration for Autonomous Underwater Vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018. [Google Scholar]
- Galceran, E.; Campos, R.; Palomeras, N.; Carreras, M.; Ridao, P. Coverage path planning with realtime replanning for inspection of 3D underwater structures. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6586–6591. [Google Scholar]
- Palomeras, N.; Hurtós, N.; Carreras, M.; Ridao, P. Autonomous Mapping of Underwater 3-D Structures: From View Planning To Execution. IEEE Robot. Autom. Lett. 2018, 3, 1965–1971. [Google Scholar] [CrossRef]
- Blaer, P.S.; Allen, P.K. Data acquisition and view planning for 3-D modeling tasks. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), San Diego, CA, USA, 29 October–2 November 2007; pp. 417–422. [Google Scholar]
- Bircher, A.; Alexis, K.; Burri, M.; Oettershagen, P.; Omari, S.; Mantel, T.; Siegwart, R. Structural Inspection Path Planning via Iterative Viewpoint Resampling with Application to Aerial Robotics. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6423–6430. [Google Scholar]
- Williams, D.P.; Baralli, F.; Micheli, M.; Vasoli, S. Adaptive underwater sonar surveys in the presence of strong currents. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2604–2611. [Google Scholar]
- Kim, A.; Eustice, R.M. Next-best-view visual {SLAM} for bounded-error area coverage. In Proceedings of the IROS Workshop on Active Semantic Perception, Algarve, Portugal, 7–12 October 2012. [Google Scholar]
- Vasquez-Gomez, J.I.; Lopez-Damian, E.; Sucar, L.E. View planning for 3D object reconstruction. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), St. Louis, MO, USA, 10–15 October 2009; pp. 4015–4020. [Google Scholar]
- Vasquez-Gomez, J.I.; Sucar, L.E.; Murrieta-Cid, R. View/state planning for three-dimensional object reconstruction under uncertainty. Auton. Robots 2017, 41, 89–109. [Google Scholar] [CrossRef]
- Isler, S.; Sabzevari, R.; Delmerico, J.; Scaramuzza, D. An information gain formulation for active volumetric 3D reconstruction. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3477–3484. [Google Scholar]
- González-Baños, H.; Mao, E. Planning robot motion strategies for efficient model construction. Robot. Res. 2000, 19, 345–352. [Google Scholar]
- Burgard, W.; Moors, M.; Stachniss, C.; Schneider, F.E. Coordinated multi-robot exploration. IEEE Trans. Robot. 2005, 21, 376–386. [Google Scholar] [CrossRef] [Green Version]
- Fox, D.; Ko, J.; Konolige, K.; Limketkai, B.; Schulz, D.; Stewart, B. Distributed Multirobot Exploration and Mapping. Proc. IEEE 2006, 94, 1325–1339. [Google Scholar] [CrossRef]
- Stachniss, C.; Martínez Mozos, Ó.; Burgard, W. Efficient exploration of unknown indoor environments using a team of mobile robots. Ann. Math. Artif. Intell. 2008, 52, 205–227. [Google Scholar] [CrossRef] [Green Version]
- Schmid, K.; Hirschmüller, H.; Dömel, A.; Grixa, I.; Suppa, M.; Hirzinger, G. View planning for multi-view stereo 3D Reconstruction using an autonomous multicopter. J. Intell. Robot. Syst. Theory Appl. 2012, 65, 309–323. [Google Scholar] [CrossRef]
- Yoder, L.; Scherer, S. Autonomous exploration for infrastructure modeling with a micro aerial vehicle. Tracts Adv. Robot. 2016, 113, 427–440. [Google Scholar]
- Bircher, A.; Kamel, M.; Alexis, K.; Oleynikova, H.; Siegwart, R. Receding Horizon “Next-Best-View” Planner for 3D Exploration. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1462–1468. [Google Scholar]
- Papachristos, C.; Khattak, S.; Alexis, K. Uncertainty–aware Receding Horizon Exploration and Mapping using Aerial Robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4568–4575. [Google Scholar]
- Arkin, R.C. Behavior-Based Robotics; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robots 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2011. [Google Scholar]
- Carreras, M.; Hernández, J.D.; Vidal, E.; Palomeras, N.; Ribas, D.; Ridao, P. Sparus II AUV-A Hovering Vehicle for Seabed Inspection. IEEE J. Ocean. Eng. 2018, 43, 344–355. [Google Scholar] [CrossRef]
- Hernández, J.D.; Istenič, K.; Gracias, N.; Palomeras, N.; Campos, R.; Vidal, E.; García, R.; Carreras, M. Autonomous Underwater Navigation and Optical Mapping in Unknown Natural Environments. Sensors 2016, 16, 1174. [Google Scholar] [CrossRef] [PubMed]
- Quigley, M.; Conley, K.; Gerkey, B.P.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 17 May 2009. [Google Scholar]
- Ribas, D.; Palomeras, N.; Ridao, P.; Carreras, M.; Mallios, A. Girona 500 AUV: From Survey to Intervention. IEEE/ASME Trans. Mechatron. 2012, 17, 46–53. [Google Scholar] [CrossRef]
- Vallicrosa, G.; Ridao, P. H-SLAM: Rao-Blackwellized Particle Filter SLAM Using Hilbert Maps. Sensors 2018, 18, 1386. [Google Scholar] [CrossRef] [PubMed]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Domain | Space | Reference | Approach | Remarks |
|---|---|---|---|---|---|
| With prior map | Underwater | 2.5D | Galceran et al. [10] | CPP and horizontal profiles | The terrain is classified in regions of low and high relief. The offline mission is adapted online using stochastic trajectory optimization |
| 3D | Palomeras et al. [11] | VP | A minimum set of views and TSP is used togenerate exploration trajectory, followed using SLAM. Simulation only | ||
| Terrestrial | 2D/3D | Blaer and Allen [12] | VP | Two stages. First, minimum set of views and TSP in 2D. Then, NBV in 3D | |
| Aerial | 3D | Bircher et al. [13] | VP | Iterative viewpoint resampling with TSP in 3D | |
| Without prior map | Underwater | 2D | Williams et al. [14] | VP | Automatic target reinspection after an initial constant altitude mission |
| Vidal et al. [8], Vidal et al. [9] | VP | Our previous work. Views are planned according to several frontiers | |||
| 3D | Kim and Eustice [15], Hover et al. [1] | VP | Perception driven navigation for the ship’s hull without prior map. Minimum set of views and TSP using a prior map for the propellers | ||
| McEwen et al. [6] | RA | The 3D map is obtained by performing wall following at different depths | |||
| Object reconstruction | 3D | Connolly [5] | VP | Original proposal of the next-best-view (NBV) approach | |
| Vasquez-Gomez et al. [16], Vasquez-Gomez et al. [17] | FB and VP | It uses the frontiers to plan the NBV. Uncertainty is taken into account. Position and maximum size of the object must be known | |||
| Isler et al. [18] | FB and VP | Information gain is used to plan the NBV. Position and maximum size of the object must be known | |||
| Terrestrial | 2D | Yamauchi [4] | FB | Original proposal of the FB approach. It clusters the frontier cells | |
| González-Baños and Mao [19] | VP | It builds a polygonal model of the environment and plans the NBV using a randomized algorithm that maximizes the information gain | |||
| Burgard et al. [20] | FB | Multirobot exploration. Each robot is equipped with a 360 degree range sensor | |||
| Fox et al. [21] | FB and VP | Multirobot exploration. Shared maps. The robots actively seek to verify their relative locations | |||
| Stachniss et al. [22] | FB | Multirobot exploration. A classifier assigns labels to different locations in the map, and these labels are used in the utility function that guides the exploration | |||
| Renzaglia and Martinelli [7] | RA | Potential fields are used to guide the exploration of a team of robots | |||
| Aerial | 3D | Schmid et al. [23] | VP | Viewpoints are planned using a coarse digital surface (DSM) in 2.5D. The data acquired from the viewpoints is used to create a 3D reconstruction | |
| Yoder and Scherer [24] | FB and VP | The exploration utility function is based on the visibility of 2D frontiers on the 2D surface of a 3D object | |||
| Bircher et al. [25], Papachristos et al. [26] | Random tree and VP | A random tree is generated where the nodes are evaluated according to the amount of unmapped space that it explores |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vidal, E.; Palomeras, N.; Istenič, K.; Hernández, J.D.; Carreras, M. Two-Dimensional Frontier-Based Viewpoint Generation for Exploring and Mapping Underwater Environments. Sensors 2019, 19, 1460. https://doi.org/10.3390/s19061460
Vidal E, Palomeras N, Istenič K, Hernández JD, Carreras M. Two-Dimensional Frontier-Based Viewpoint Generation for Exploring and Mapping Underwater Environments. Sensors. 2019; 19(6):1460. https://doi.org/10.3390/s19061460
Chicago/Turabian StyleVidal, Eduard, Narcís Palomeras, Klemen Istenič, Juan David Hernández, and Marc Carreras. 2019. "Two-Dimensional Frontier-Based Viewpoint Generation for Exploring and Mapping Underwater Environments" Sensors 19, no. 6: 1460. https://doi.org/10.3390/s19061460