In the simulation experiment, the performance of the JECHR algorithm is validated by healing event coverage holes in multi-constraint networks. Five mobile robots take five different kinds of sensors setting out from the base point to heal the networks in an optimal route. According to various restraints in four cases, the amount of sensors that are carried by each mobile robot in each case is also different.
7.1. Environment Settings
In the simulation experiments, five kinds of sensors are applied. These five different kinds of sensors are smoke sensors, camera sensors, laser sensors, RFID sensors, and infrared sensors. They have various repair time, repair cost, repair energy and repair error depending on their own attributes. Each mobile robot carries one kind of sensor. The parameters of various sensors are listed in
Table 1.
In order to compare the performance of the event coverage hole repair algorithm in multi-constrained environment, the parameters of different sensors are decided by the properties of the sensors. There is no related work in event coverage hole repair under multiple restraints. In practice, applying smoke sensors to repair event coverage holes is the fastest. Therefore, the repair time of the smoke sensor is set to 1, which is the smallest of all sensor repair time. In practical applications, it is most accurate to use the camera sensor to repair the event coverage holes. Therefore, the repair error of the camera sensor is set to 5, which is the smallest of all sensor errors. The energy consumption of the RFID sensor is very low. Therefore, the repair energy of the RFID sensor is set to 10, which is the smallest of all sensor repair energy. The infrared sensors are susceptible to unrelated heat sources, resulting in low accuracy. Therefore, the repair error of the RFID sensor is set to 35, which is the largest of all sensor repair errors. In practical applications, there will be many types of smoke sensors, camera sensors, laser sensors, RFID sensors, and infrared sensors, whose parameters may not be the same as the sensor parameters set in the experiment. It can be seen from the performance comparison of the algorithms that the performance of algorithms do not depend on the sensor parameter setting.
7.2. Experimental Evaluation
During the healing process, the event coverage hole repair algorithms not only need to satisfy the restraints of repair time, repair cost, repair energy, and repair error, but also need to heal event coverage holes in the optimal path. Next, the influence of the number of mobile robots on event coverage hole repair is tested. In the performance comparison experiment, the JECHR algorithm is compared with the MOACO [
37], iMOGA [
38], and SOS-SA [
39] algorithms in the same experimental environment. The relationship between the repair path distances under different number of event coverage holes, repair time restraints and repair error restraints is compared.
The simulation experiments on event coverage hole repair are carried out in four different experimental cases to test the repair performance under different restraint conditions. Each case is subject to different repair restraints. The experimental parameters are presented in
Table 2. The different experiment conditions are set to evaluate the performance of the proposed algorithm in a variety of multi-constraint environments, which are subject to diverse repair time, repair cost, repair energy, and repair error restraints. The experiment conditions are set according to the parameters of sensors in
Table 1. The experiment conditions are set to test whether the proposed algorithm can reasonably allocate sensor resources in multi-constraint environments. In practical applications, the event coverage hole repair process will face a variety of multi-constraint environments. The experiment conditions in the manuscript are part of multi-constraint environments in practical applications.
Figure 1,
Figure 2,
Figure 3 and
Figure 4 perform the effect and path of network healing in four multi-constraint scenarios.
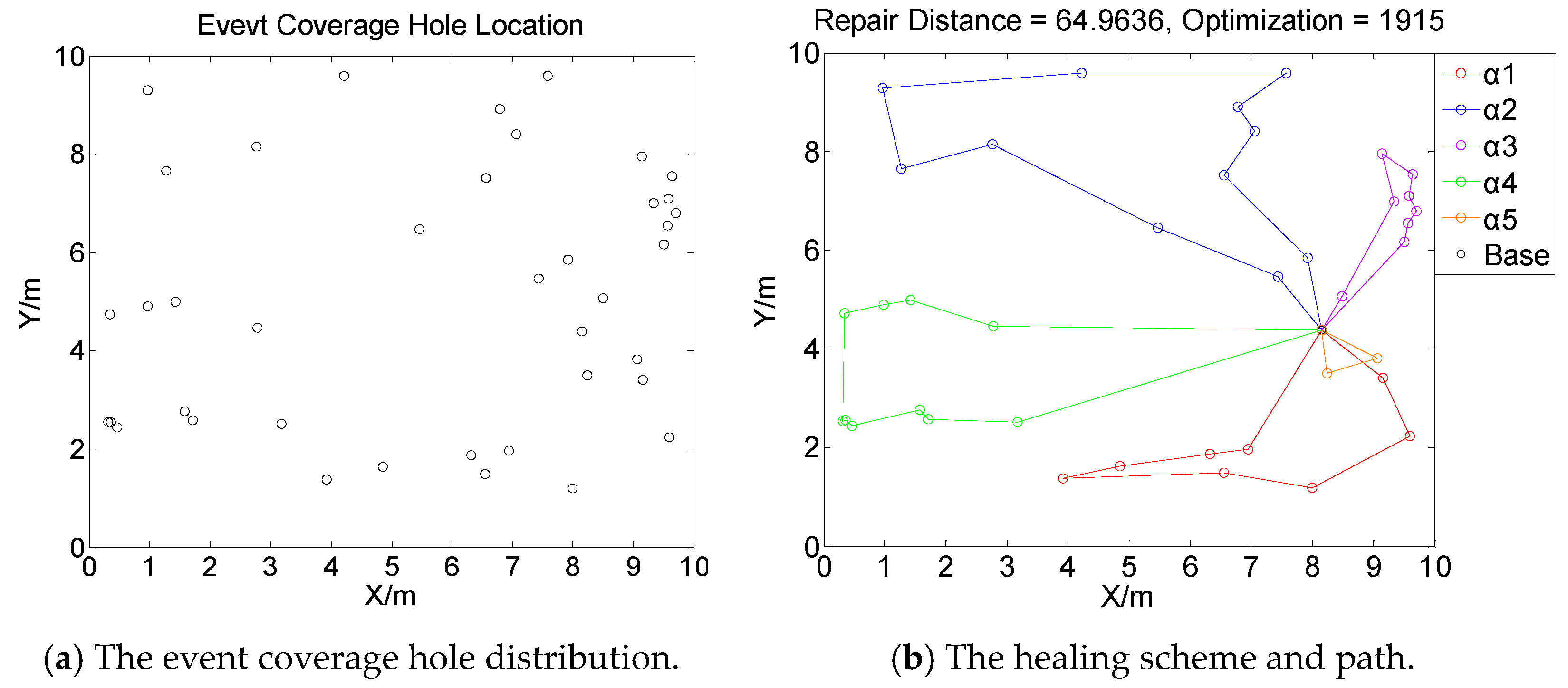
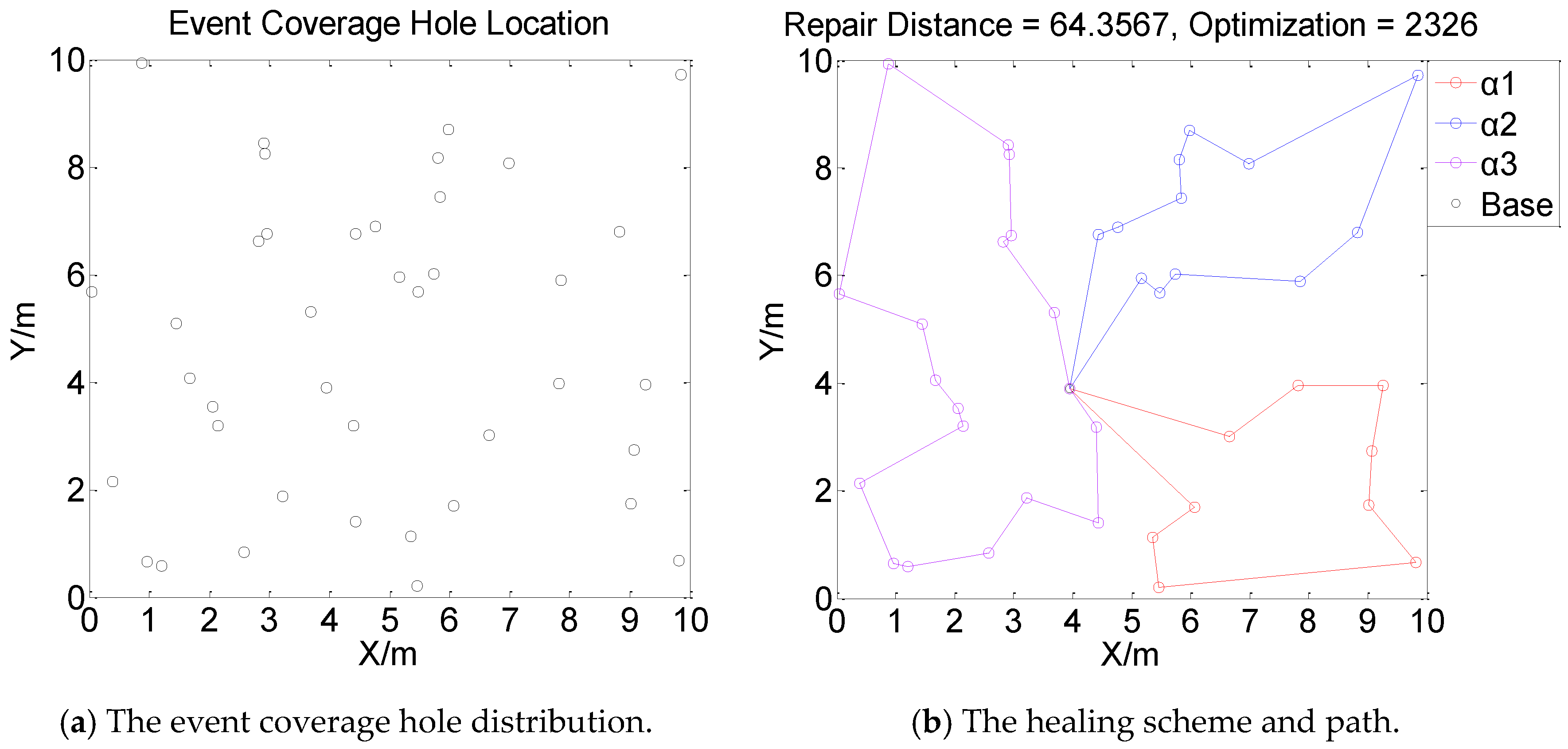
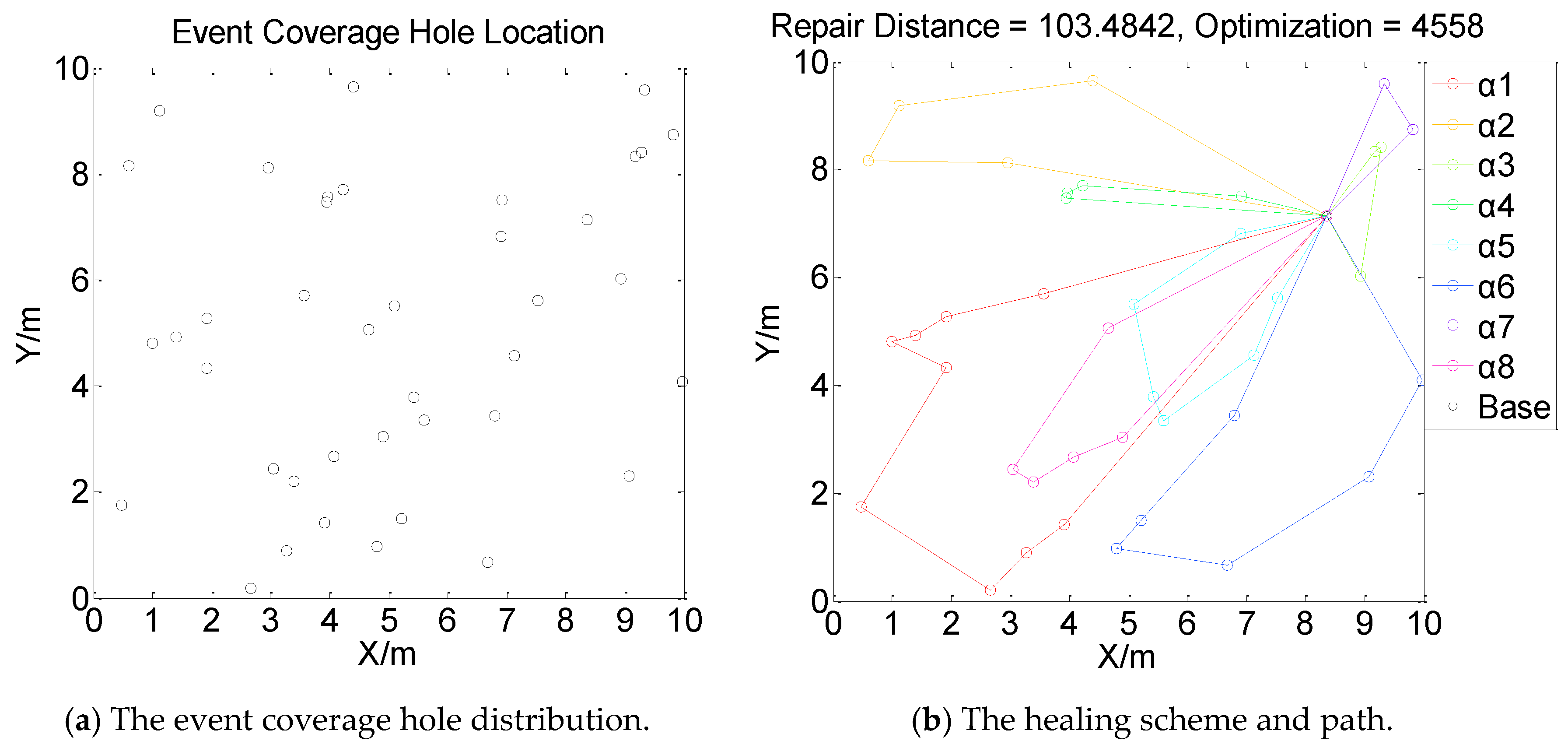
Figure 1a,
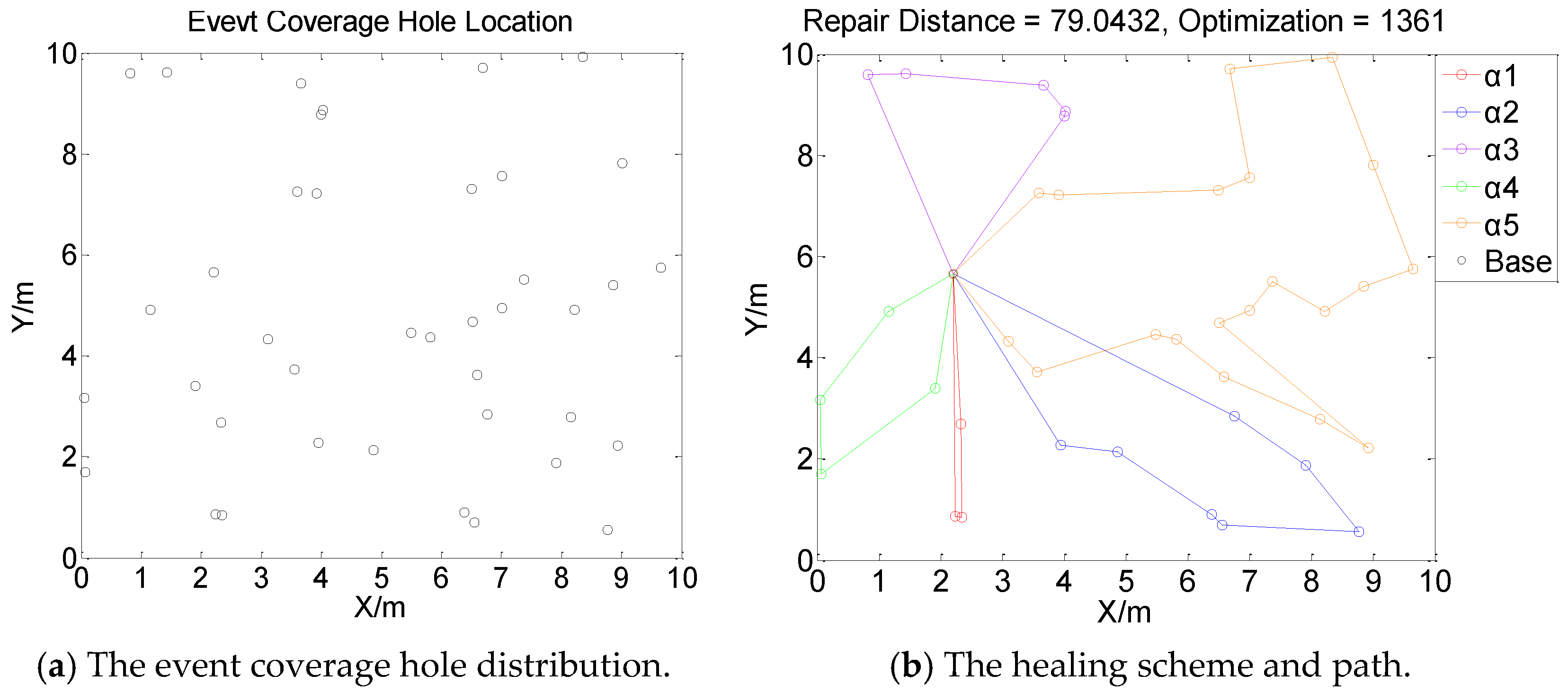
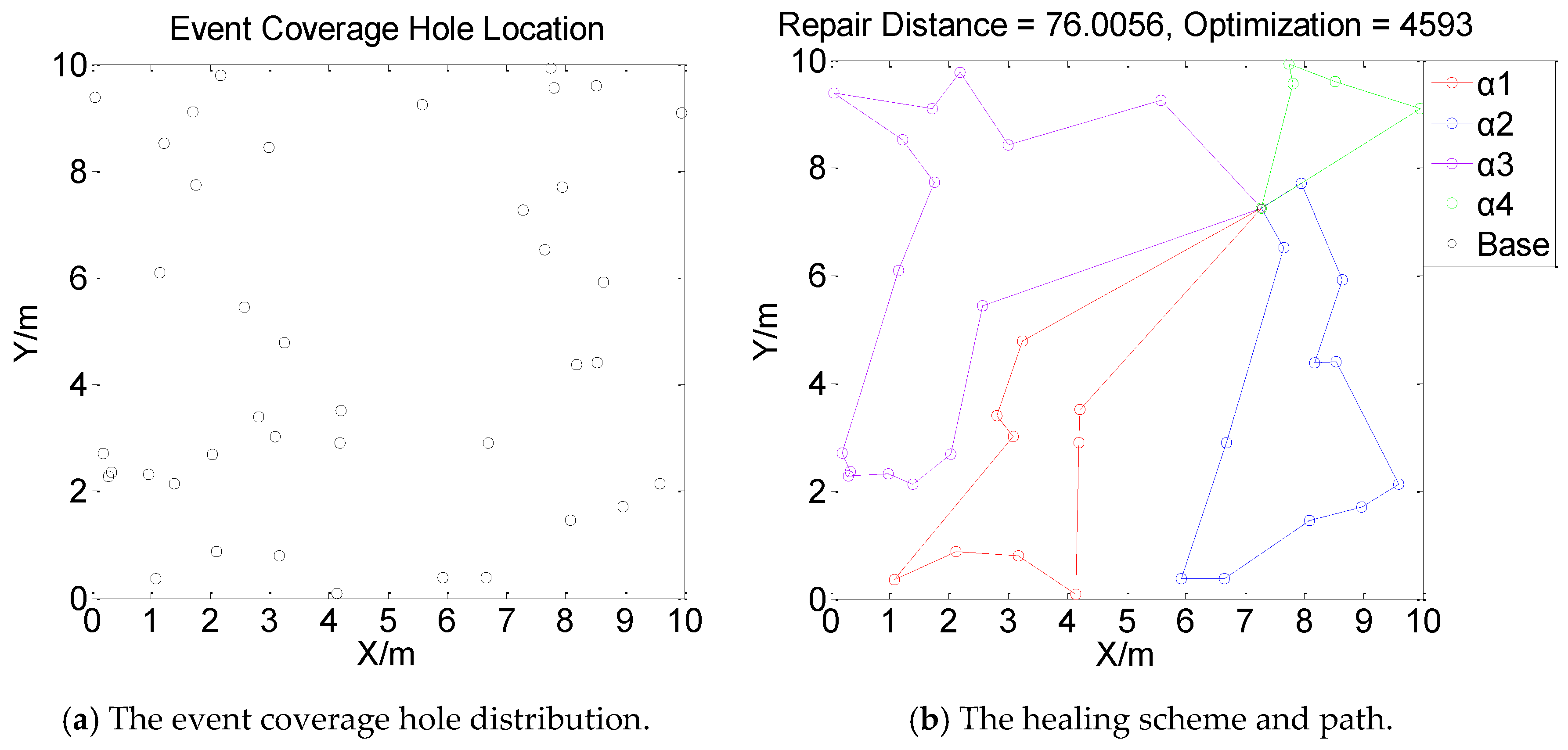
Figure 2a,
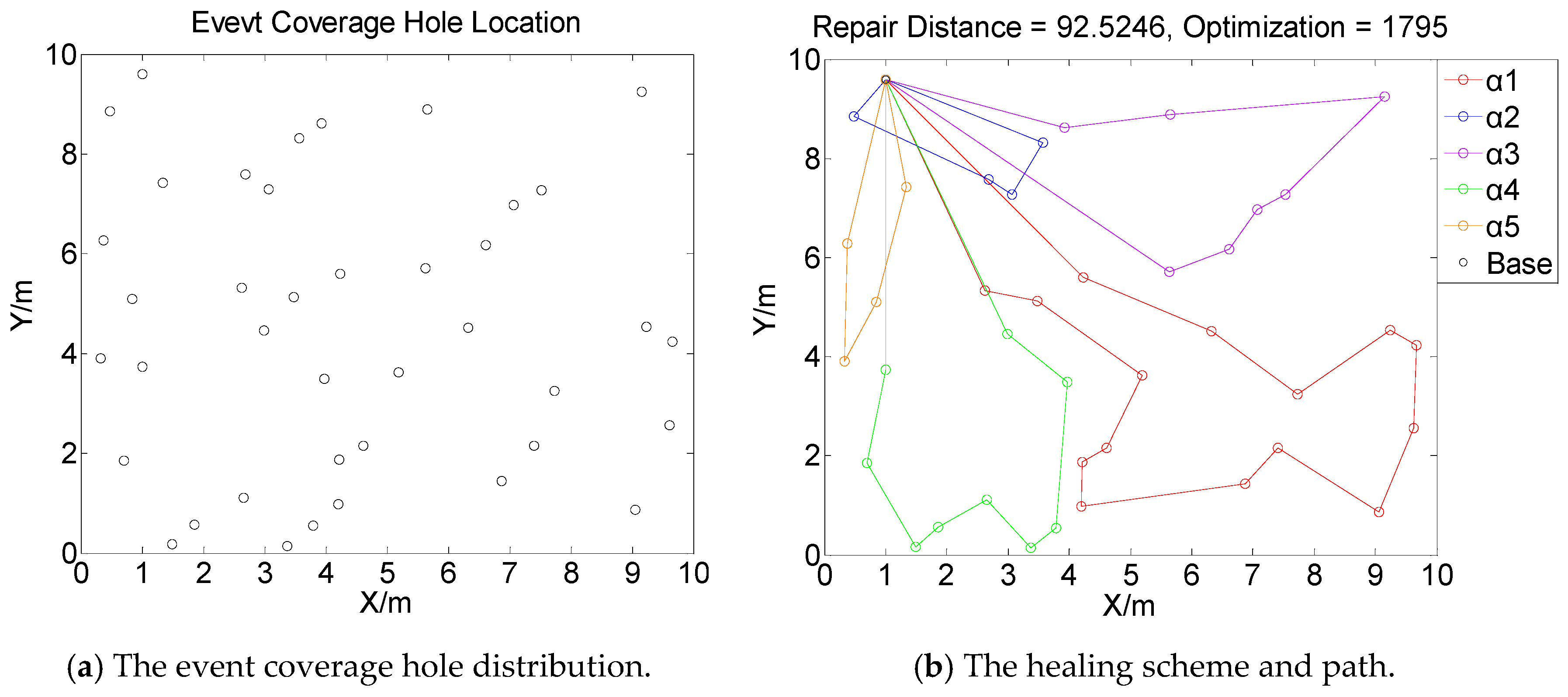
Figure 3a, and
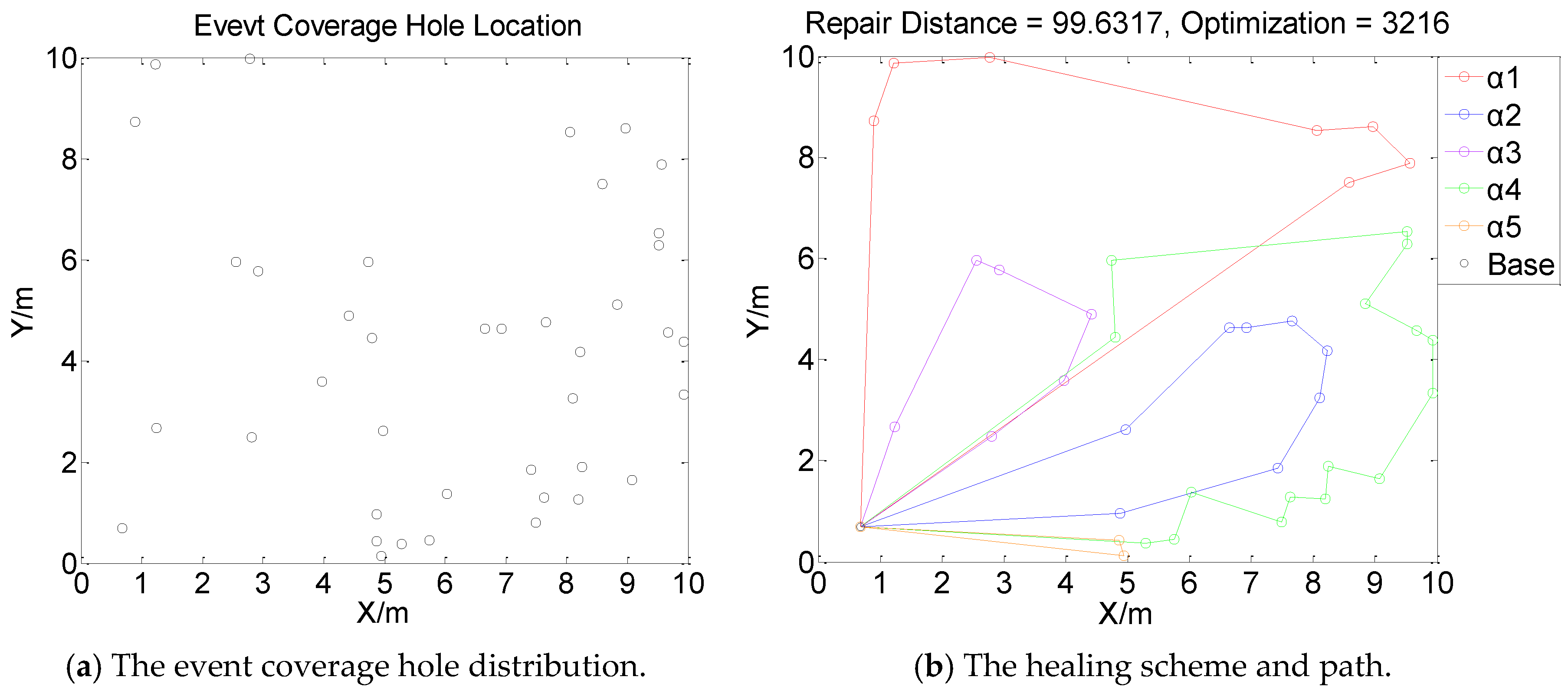
Figure 4a demonstrate four different event coverage hole distribution in the networks. The circles in the figure represent the position of the event coverage holes.
Figure 1b,
Figure 2b,
Figure 3b and
Figure 4b demonstrate the healing scheme and path for four multi-constraint cases. Five mobile robots that take five type of sensors set out from the base point synchronously. Each mobile robot takes one kind of sensor to heal forty event coverage holes in the network. The various colored paths in
Figure 1b,
Figure 2b,
Figure 3b and
Figure 4b denote the healing path of five mobile robots.
In practical applications, event coverage holes will occur after monitoring tasks or monitoring demands change. Event coverage holes can occur anywhere in the surveillance area based on different monitoring tasks and demands. The location of the event coverage holes is random. Therefore, the location of the event coverage holes is set to appear randomly to test whether the proposed algorithm can meet the practical application demands. The event coverage hole repair algorithm needs to accommodate the event coverage holes that may occur anywhere in the surveillance area. In the experiments, the position coordinates of the forty event coverage holes are randomly generated in the surveillance area to test whether the proposed algorithm can repair the event coverage holes under any location distribution.
In [
40], the authors consider the problem of planning paths for unicycle robots with dynamic model. In practical applications, it is not possible for all the robots to turn into any headings. In the experiment, we simplify the robots to be points, which are only suitable for robots that can move in all directions. When healing event coverage holes in four cases, it is required to satisfy multiple repair restraints synchronously. In
Figure 1, the first case for the repair error restraints is the most rigorous in four cases. Besides, the healing procedure of the networks is not merely subject to rigorous error restraints, but also restricted by repair time, cost, and energy restraints. Thus, the camera sensors, which have less repair error during the healing process of networks, are more used, with a total of 11; in
Figure 2, the second case for repair cost restraints is the severest of the four cases. The healing process of the event coverage holes is not only subject to severe error restraints, but also restricted by the other three repair restraints. Thus, the infrared sensors that have lower repair cost are more applied, with a total of 20; in
Figure 3, the third case for the repair time restraints are the most rigorous of the four cases during the network healing procedure. At the same time, repair cost, energy, and error restraints also need to be satisfied. Thus, the smoke sensors, that have less repair time, are most applied, with a total of 15; in
Figure 4, the repair energy restraints are the most rigorous of the above four cases. It must also satisfy the other three restraints.Therefore, the RFID sensors with less energy consumption are most applied.
During the healing procedure, the global repair algorithm on the basis of DE algorithm is applied to make sure the diversity of the healing mechanism. The local repair algorithm on the basis of the IWO algorithm ensures the astringency of the healing process. Thus, the JECHR algorithm on the basis of DE algorithm and IWO algorithm is able to heal the networks effectively in multi-constraint environment.
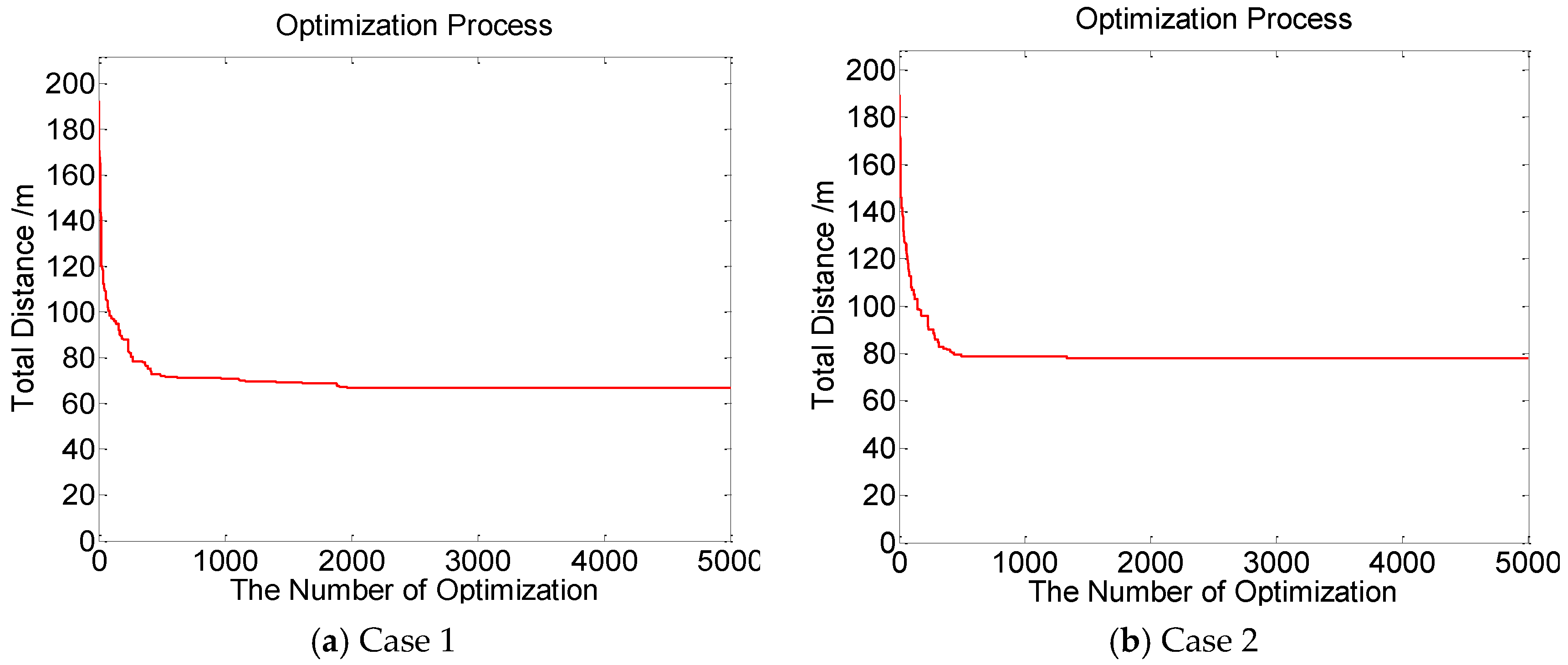
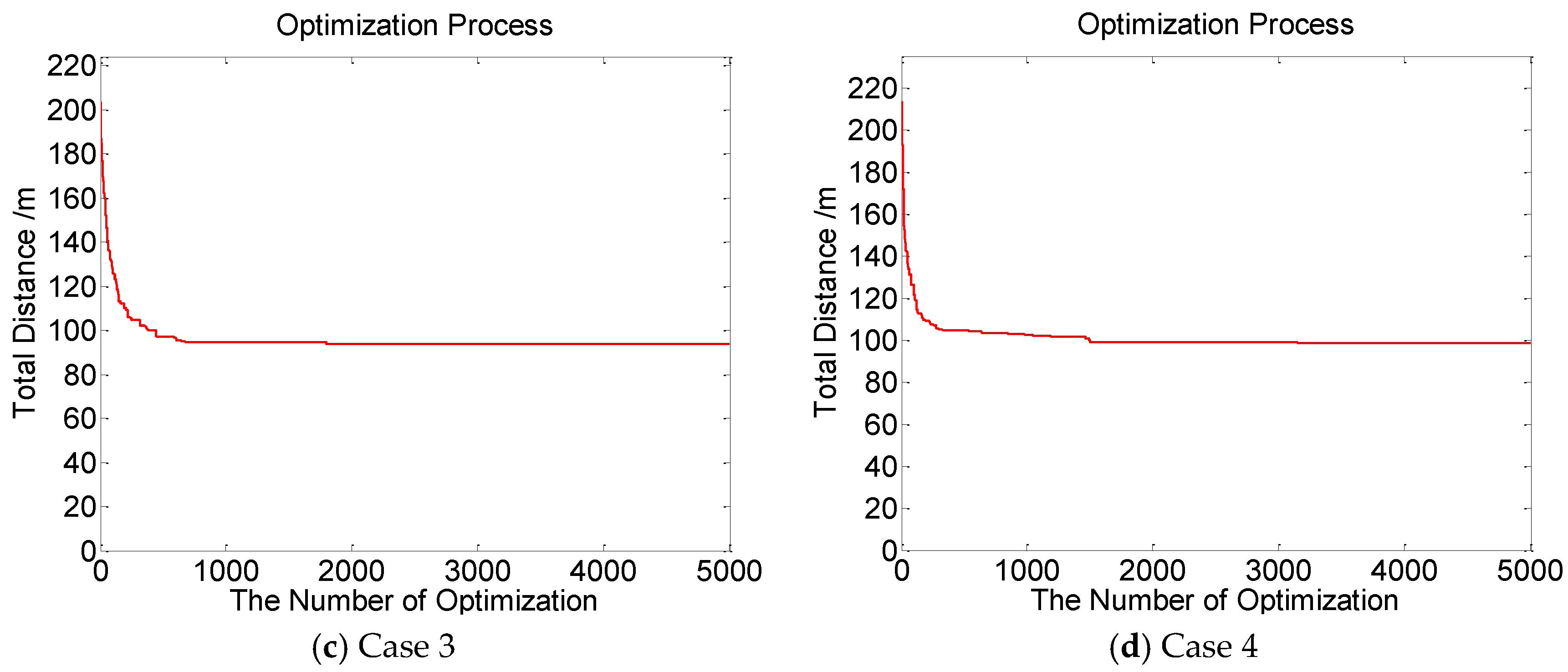
The relationship between the repair path distance by mobile robots and the optimization process in the four multi-restraint cases is shown in
Figure 5. It indicates that in the initial stage of the optimization process, the repair route distance of the event coverage holes decreases rapidly. As the repair process continues, the distance of the repair route decreases slowly and tends to be stable finally. In the optimization process, the repair distance of event coverage holes declines steadily. There is no problem of trapping into local optimum and continuous oscillation. The global repair algorithm on the basis of DE algorithm is able to optimize the global repair route quickly in the initial stage. At the same time, the local repair algorithm on the basis of IWO algorithm is able to prevent the optimization process from trapping into local optimum and make sure the astringency of the optimization process. In
Figure 5a, the first case is optimized after 1915 times. The repair distance of the event coverage holes is 64.9636 m; in
Figure 5b, the second case is optimized after 1361 times. The repair distance of the event coverage holes is 79.0432 m; in
Figure 5c, after 1795 optimization processes, the repair distance of the third case is 92.5246 m; in
Figure 5d, the fourth case passes through 3216 optimization processes. The repair distance is 99.6317 m.
Next, in order to verify the effect of the amount of mobile robots on the event coverage hole repair performance, three, four, and eight mobile robots are applied to heal forty event coverage holes respectively, as shown in
Figure 6,
Figure 7 and
Figure 8.
Figure 6,
Figure 7 and
Figure 8 indicate that the repair path distance gradually increases as the number of mobile robots in the networks increases. While, the optimization times are also rising. This is due to all mobile robots need to set out from the base point. Compared with moving from repaired event coverage holes to the unrepaired event coverage holes, setting out from the base point and returning to the base point add extra distance which leads to an increase in repair path distance. During the process of healing networks, mobile robots are subject to multiple restraints. The repair strategy need to weigh the relationship between multiple restraints and repair paths. Therefore, the distance of the repair path by each mobile robot is not relatively balanced. In
Figure 6,
Figure 7 and
Figure 8, according to different distribution of event coverage holes in the network, the mobile robots select the optimal starting point as the base point on the basis of the total repair path distance.
As the number of mobile robots in the network increases, the complexity of path planning increases rapidly, which eventually leads to an increase in optimization times. In practical applications, different kinds of sensors are needed to heal the network. On the basis of the characteristic and number of sensors, multiple mobile robots are needed to heal event coverage holes in the network. Although the total repair distance of mobile robots increases, the repair performance and repair speed of multiple mobile robots will be greatly improved, especially for the application scenarios that have strict demands for real-time repair.
7.3. Comparison with the MOACO, iMOGA and SOS-SA Algorithms
In this section, for purpose of verifying the performance of the JECHR algorithm, the proposed algorithm is compared with the MOACO algorithm and the latest iMOGA, SOS-SA algorithms under different number of event coverage holes [
37,
38,
39,
41]. The representation of the candidate solutions for each method (JECHR, MOACO, iMOGA, SOS-SA) is listed in
Table 3,
Table 4,
Table 5 and
Table 6. The parameters used in each method under comparative study are listed in the in
Table 7,
Table 8,
Table 9 and
Table 10.
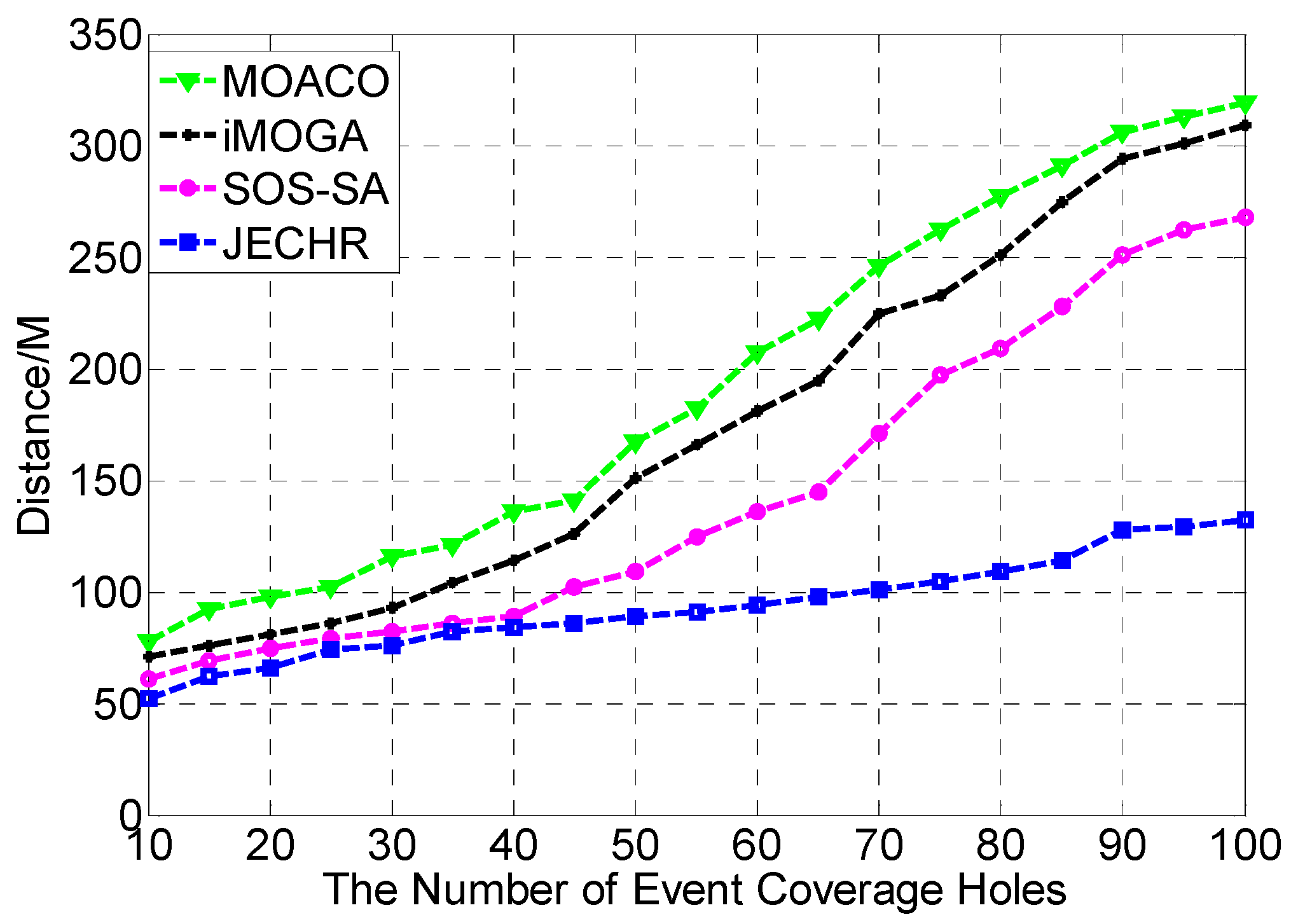
As
Figure 9 shows, in the initial stage, as the number of event coverage holes continues to increase, the repair path distances of the four algorithms increase rapidly. When the number of event coverage holes in the network exceeds 90, the repair path distance growth of the SOS-SA algorithm and the JECHR algorithm tends to be flat. This is due to when the amount of event coverage holes in the network is small, the density of event coverage holes is low. Mobile robots need to move longer distances to heal event coverage holes in the network. As the amount of event coverage holes increases, the density of event coverage holes in the network increases gradually. Finally, the network tends to be saturated. The SOS-SA algorithm and JECHR algorithm continuously optimize the repair path, which gradually slows down the growth of the repair path distance. The repair effect of the JECHR algorithm is obviously superior to the MOACO, iMOGA, and SOS-SA algorithms. The performance of the MOACO algorithm is the worst. In the changing network environment, the parameters α and β of the MOACO algorithm cannot be adaptively adjusted according to different network environment. Therefore, the solving speed is slow. The quality of solutions are poor. The SOS-SA algorithm is based on simulated annealing algorithm, which is a greedy algorithm essentially. Therefore, its parameters are difficult to control. There is no guarantee that it can converge to the optimum solution once. The SOS-SA algorithm usually takes multiple attempts to get the optimum solution that is likely to trap into local optimum. The iMOGA algorithm is a multi-objective genetic algorithm, which has a certain dependence on the initial population selection. In the mean time, the multi-objective genetic algorithm is prone to premature phenomenon. The algorithm has limited search ability for new space and is easy to converge to local optimum. Therefore, when there are plenty of event coverage holes in the network, it is impossible for iMOGA algorithm to provide an optimal repair solution for the network.
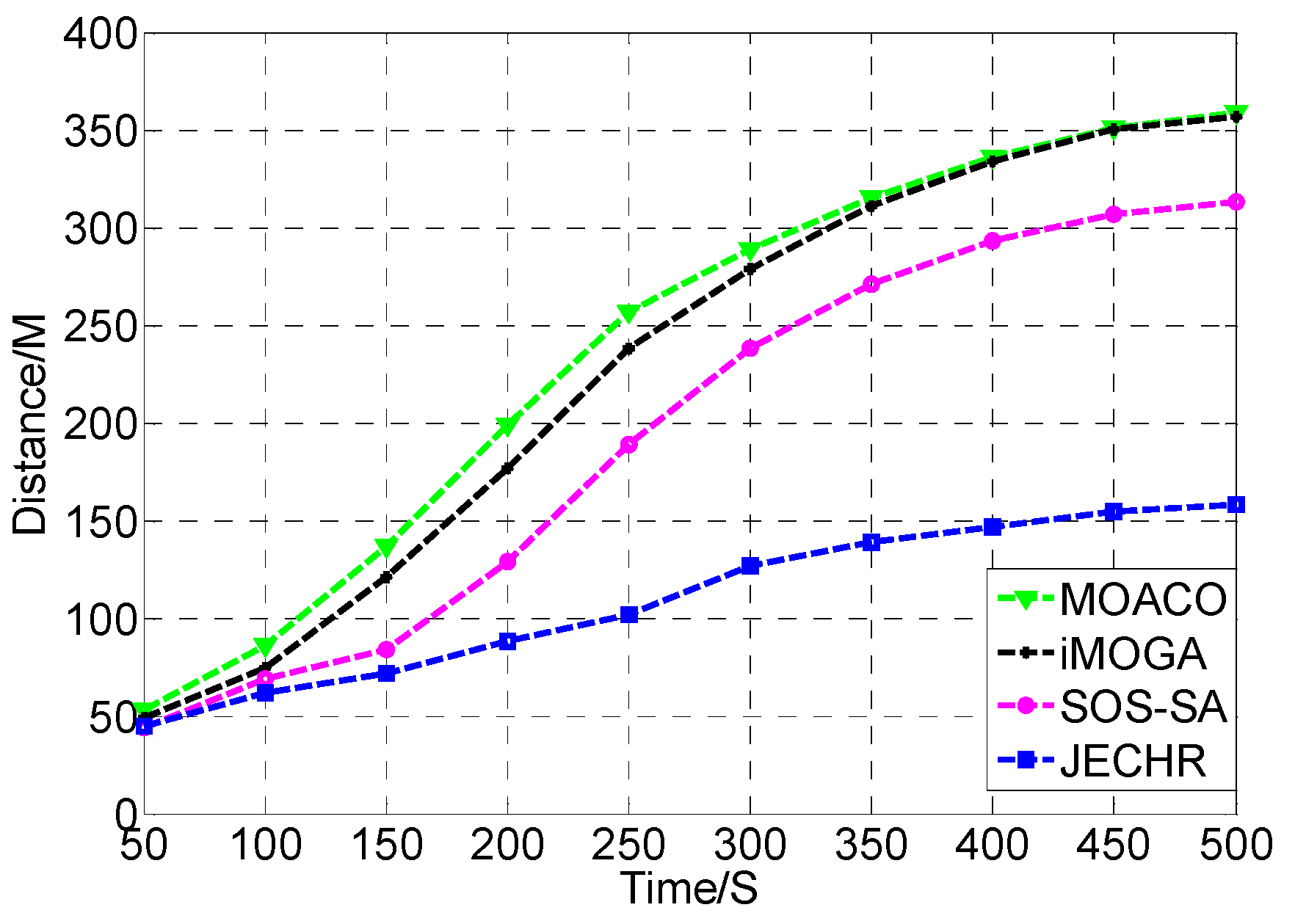
To verify the performance of the JECHR algorithm in the face of different restraints, the JECHR algorithm is compared with the MOACO algorithm and the latest iMOGA, SOS-SA algorithms under different single repair time and repair error restraints. Currently, there is no related work in event coverage hole repair under multiple restraints.
As
Figure 10 shows, the repair time restraint continues to increase. More and more sensors need to be deployed to heal the event coverage holes in the network. Mobile robots need to move longer distances to repair the network. The repair effect of the JECHR algorithm is superior to the MOACO, iMOGA, and SOS-SA algorithms. The MOACO algorithm converges slowly and is likely to trap into local optimum. In the mean time, the ant colony algorithm needs a long optimization time. In the optimization process, the MOACO algorithm is prone to stagnation, which cannot find a better solution. The performance of the SOS-SA algorithm is greatly influenced by the repair time restraint. The SOS-SA algorithm is based on simulated annealing algorithm which is also a greedy algorithm essentially. The simulated annealing algorithm has poor global optimization ability, which is susceptible to parameters. The iMOGA algorithm is easy to premature, which has limited search ability for new space. It is prone to converge to local optimum. Therefore, when there are many event coverage holes that need to be repaired in the network, the iMOGA algorithm is likely to trap into local optimal solution. The repair path cannot be further optimized. The JECHR algorithm applies the DE algorithm for global repair to make sure the diversity of the healing strategy. Meanwhile, the IWO algorithm is used for local optimization to make sure the astringency of the optimization procedure. Therefore, the JECHR algorithm can heal the event coverage holes with the shortest repair path distance under different repair time restraints.
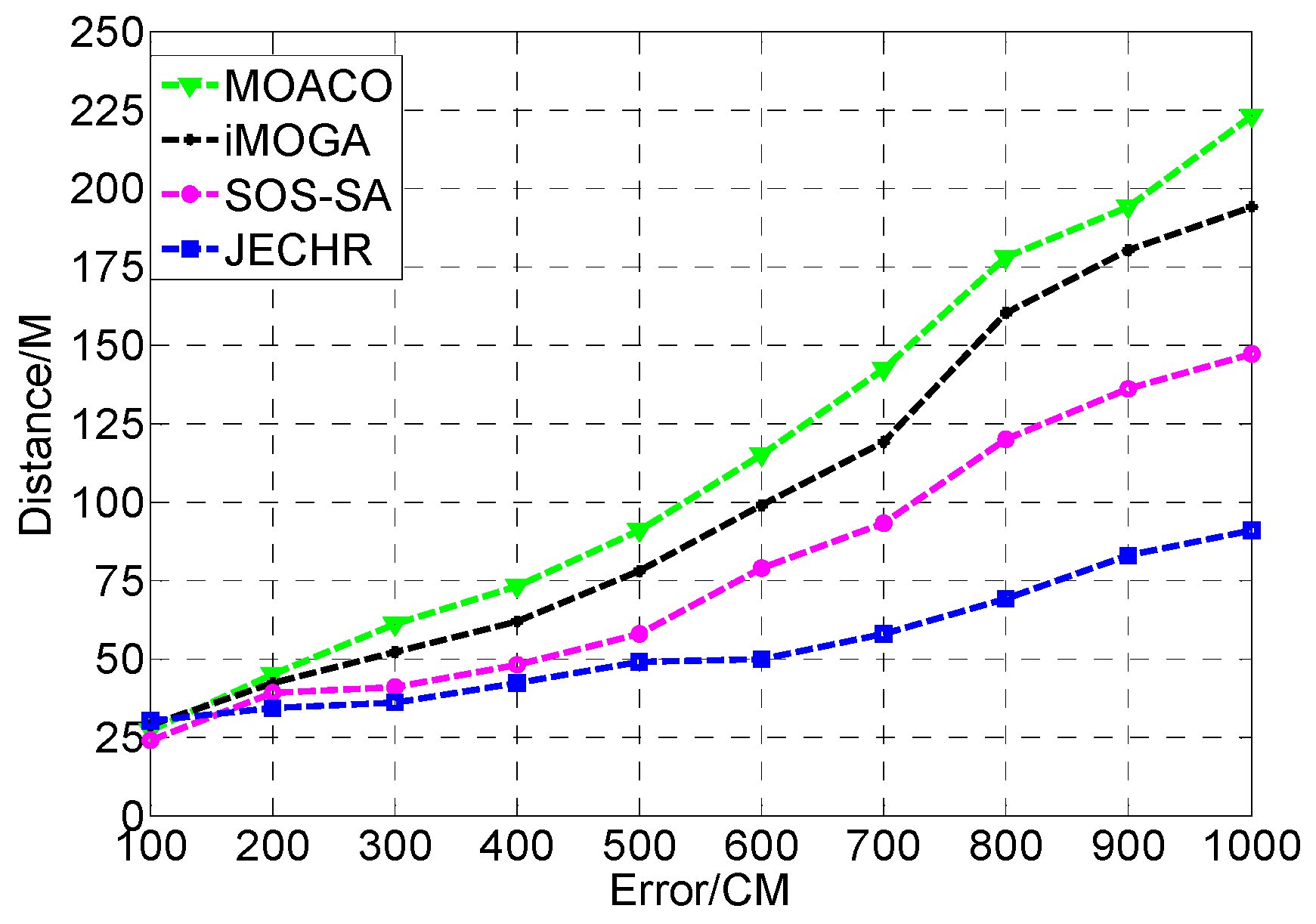
As
Figure 11 shows, as the error restraints increase, more and more sensors need to be deployed to heal the event coverage holes in the networks. Then, mobile robots need to move longer distances to complete the network repair. The repair path distance of the JECHR algorithm is obviously superior to MOACO, iMOGA, and SOS-SA algorithms. The MOACO algorithm converges slowly and is likely to trap into local optimum. In the optimization process, the MOACO algorithm is prone to stagnation which cannot find a better solution. The iMOGA and SOS-SA algorithms are affected by the error restraint greatly. The iMOGA algorithm has a certain dependence on the initial population selection. In the meantime, the multi-objective genetic algorithm is prone to premature and easily converges to the local optimal solution. The global optimization ability of the SOS-SA algorithm is poor. Meanwhile, it is susceptible to parameters. The JECHR algorithm can be adapted to different repair error restraints. Moreover, conventional penalty function technique cannot effectively weigh the size of the penalty factor. The JECHR algorithm can effectively overcome the problem that the penalty factor has function dependence and poor generality. Therefore, the JECHR algorithm can effectively overcome the impact of increased network repair error on the repair path distance.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}