
Overview of Tensor-Based Cooperative MIMO Communication Systems—Part 1: Tensor Modeling

Abstract
:1. Introduction
- A detailed introduction of the tensor operations and decompositions useful for designing tensor-based cooperative communication systems; see Section 2.
- An overview of various MIMO cooperative systems, including relaying systems, IRS- and UAV-assisted communication systems; see Section 3.
- An overview of the main codings used in MIMO cooperative systems, with a particular emphasis on tensor codings proposed during the last decade in the context of point-to-point and cooperative communication systems; see Section 4.
- A presentation in a didactic and unified way of several two-hop systems highlighting different new tensor models. Some of these systems are extensions of existing ones; see Section 5.
2. Tensor Prerequisites
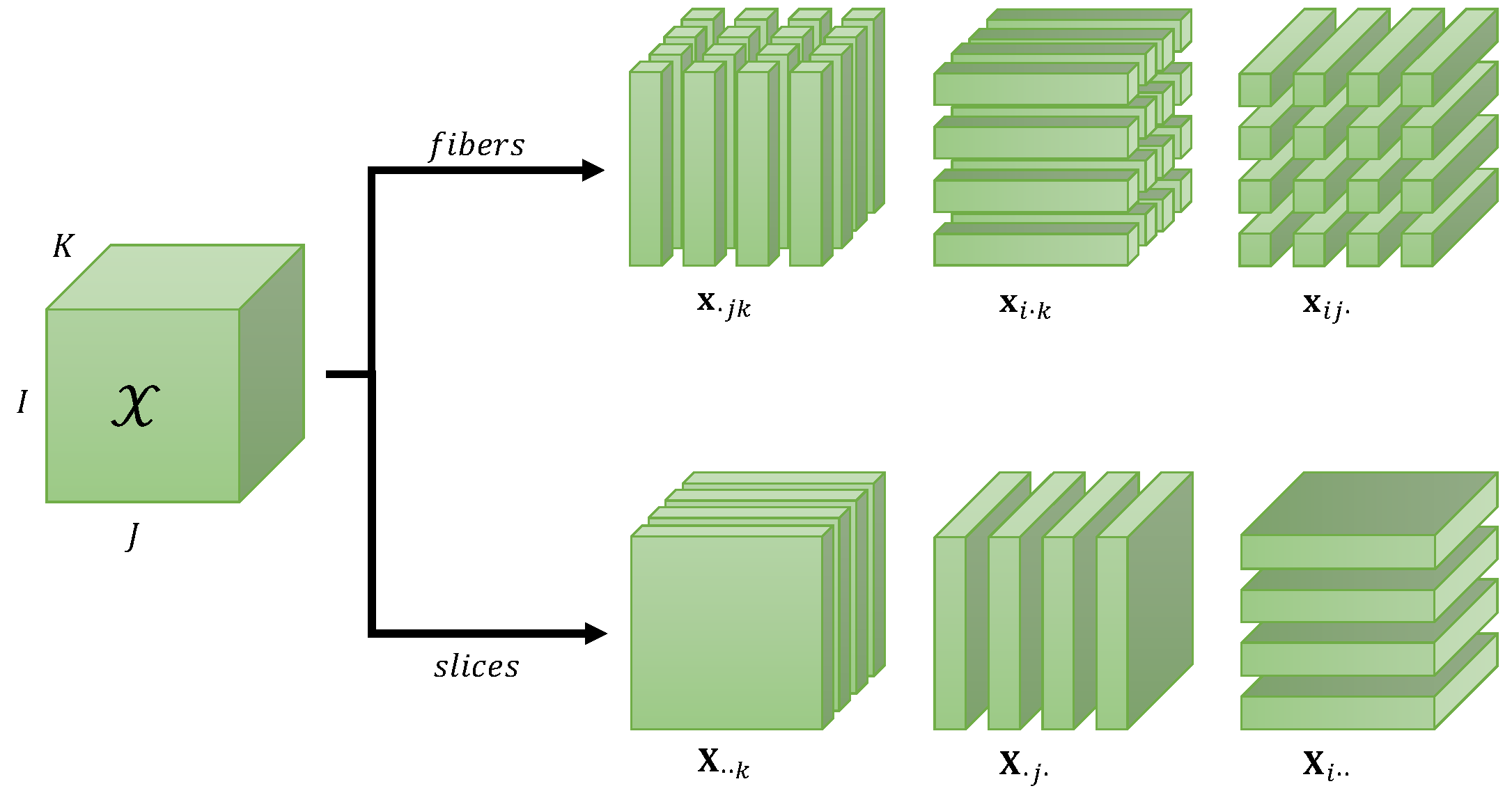
2.1. Some Definitions and Notion of Slice
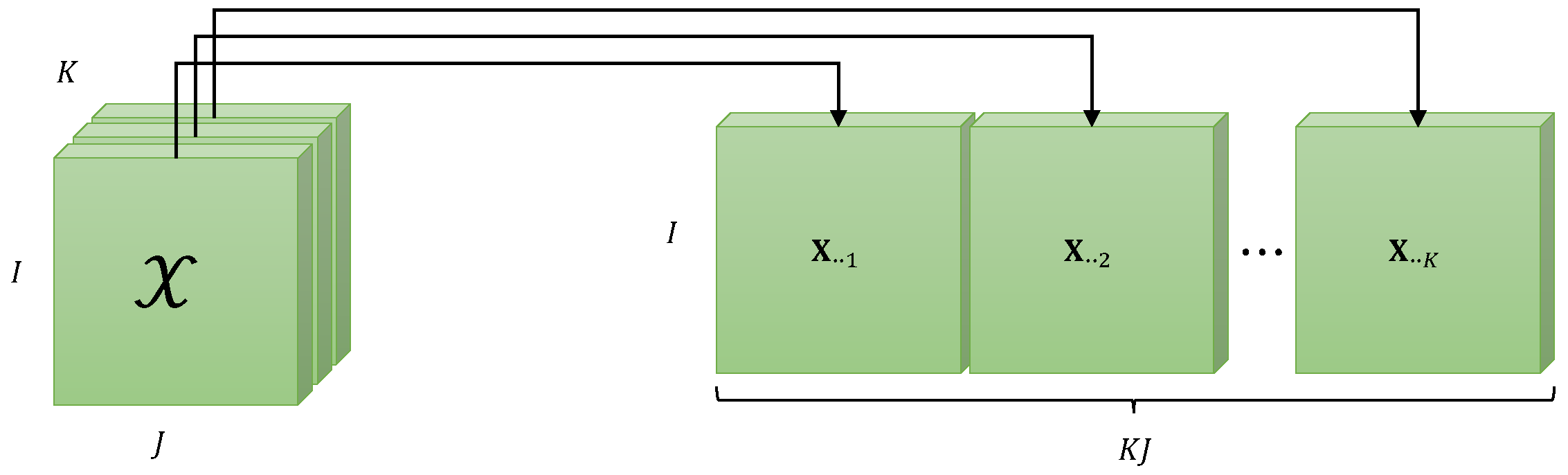
2.2. Notion of Mode Combination and Matricization
2.3. Recall of Some Tensor Operations
- For two products of along the mode p, with and , we have:From this property, we can conclude that the double mode-p product is commutative only if the matrices and commute ().
- The contracted product is associative; in other words, for any tensors , , and such that and , with , we have:This double contracted product corresponds to a double summation over the indices and on the one hand, and over the indices and on the other hand. It provides a tensor of order .
- Property (6) is valid when bijectively positions the indices and in the sets , and , respectively. When represent mode numbers, the property (6) is no longer valid because the result of the double-contracted product and depends on the order in which these products are made. For instance, for , and , the double product can be written in two different ways, giving the same result:In the left member of this equality, the product is first computed, followed by the product , while in the right member, the product is computed before the product . We will say that in the first case (resp. the second case), the modes- products are performed from left to right (resp. from right to left). This type of consideration is useful for writing the equation of a tensor train decomposition (TTD). See [16].
- The outer product of P non-zero vectors , gives a rank-one tensor of order P and size such that:For instance, the outer product of three non-zero vectors , and gives a rank-one, third-order tensor of size such that:Reciprocally, a Pth-order tensor is a rank-one tensor if it can be written as the outer product of P vectors , with . Hitchcock [17] showed that any tensor can be written as a sum of rank-one tensors, and the rank R of the tensor is the smallest number of rank-one tensors needed to write it as a linear combination, i.e.,: , where is the rth column of the pth matrix factor , . As shown in Section 2.4, when R is minimum, such a decomposition is called a canonical polyadic decomposition (CPD) or parallel factor (PARAFAC) analysis [18].
- Note that the outer product of with gives a rectangular tensor of order belonging to the space .
2.4. Recall of Basic Tensor Decompositions
3. Overview of Cooperative Communication Systems
3.1. How to Classify Tensor-Based Cooperative Systems
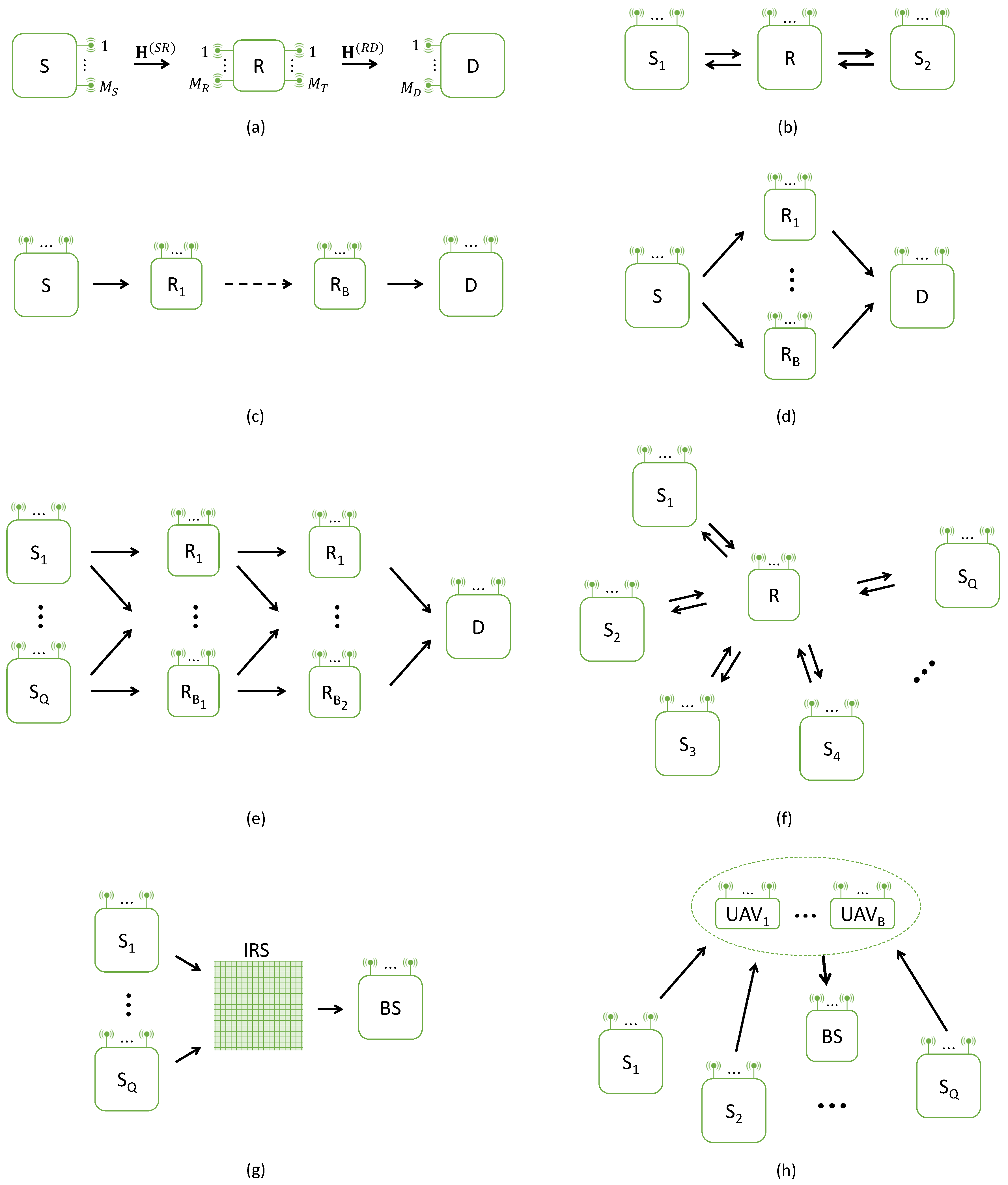
- the network architecture, which depends on the numbers of users (Q), hops (H) and relays (B), as illustrated in Figure 3;
- the modulation technology used in terms of channel access and multiplexing, like CDMA (code division multiple access), TDMA (time-division multiple access), FDMA (frequency-division multiplexing access), OFDM (orthogonal frequency-division multiplexing), or hybrid technique combining OFDM with CDMA, i.e., OFDM-CDMA, also denoted OFCDM;
- the type of coding (matrix/tensor) used at the source and relay nodes, which makes it possible to take into account several diversities, like space-time (ST) and space-time-frequency (STF) codings, to obtain space, time and frequency diversities, i.e., redundancies of transmitted symbols in each of these domains; see Section 4 for a presentation of different codings;
- the type of communication in the sense of two-way versus one-way communication, i.e., with or without feedback from the receiver to the sender;
- the type of transmission in the sense of full-duplex (FD) versus half-duplex (HD) transmission, i.e., using a bi-directional communication channel that can carry information in both directions simultaneously or not, respectively; FD increases system throughput;
- the relaying protocol: the two most common protocols are decode-and-forward (DF) and amplify-and-forward (AF) ones, depending upon the relays decode or not the received signals; with the DF protocol, the signals received at the relays are decoded and then re-encoded before being forwarded to the destination, whereas with the AF protocol, the received signals are simply amplified and retransmitted without decoding;
- the use of a pilot (also called training) sequence at the receiver for channel estimation, which corresponds to a pilot-assisted transmission resulting in a supervised system, in contrast with an unsupervised or semi-blind one when only few pilot symbols are used;
- the type of channel fading in frequency domain: frequency-flat fading versus frequency-selective fading, based on whether or not all frequency components of the transmitted signals are attenuated by the same fading. In the last case, the channel coefficients depend on the frequency. Very often, a block fading is considered, i.e., the channel coefficients are assumed to be constant during a transmission block; they can be time varying when the transmitter and receiver are moving with respect to each other; channel characteristics also concern the presence or non-presence of multipath propagation, and of directional angles (direction of departure (DoD) and of arrival (DoA) angles); other channel properties can be exploited, such as sparsity, low-rank, or reciprocity between forward and backward paths, i.e., between two communication nodes; this property, commonly used in time-division duplexing (TDD) communication networks, allows alleviating overhead requirements for channel state information (CSI) feedback; see [20] for a study of channel reciprocity in IRS-assisted wireless networks;
- the possibility or not of exploiting a direct link between the source and the destination nodes, also called a direct line-of-sight (LOS) path, which is often assumed to be unavailable due to the presence of large obstacles or long distances;
- the tensor models for signals received at the relay and destination, which conditions the type of receiver; the order of the tensors mainly depends on the diversities taken into account via the coding; in Table 9 (presented in Section 3.3), the tensor model associated with each cooperative system is mentioned; a list of main tensor models used in the context of cooperative communications is given at the end of this section;
- the type of receiver: SVD-based closed-form, like the Khatri-Rao factorization (KRF) and Kronecker factorization (KronF) methods, versus iteratives like alternating least-squares (ALS) or Levevenbergh-Marquardt (LM) algorithms.
- the use of intelligent reflecting surface (IRS), i.e., IRS-assisted communication systems, which can be viewed as relay systems employing 2D surfaces composed of a large number of passive reflecting elements for enhancing the coverage of wireless communications;
- the use of unmanned aerial vehicular (UAV), leading to UAV-aided communication systems.
3.2. Different Architectures of Cooperative Systems
3.3. Overview of Cooperative Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | OFDM | mmW | IRS | One/Two Way | UAV | Q Users | H Hops | B Relays | Coding Training | Tensor Models |
|---|---|---|---|---|---|---|---|---|---|---|
| [21] | one-way | 1 | 2 | 1 | Simplified KRST | CPD-PARATUCK | ||||
| [22,23] | one-way | 1 | 2 | 1 | Simplified KRST | Nested CPD | ||||
| [24] | one-way | 1 | 2 | 1 | TST | NTD | ||||
| [25] | one-way | 1 | 2 | 1 | MKRST MKronST | CPD | ||||
| [26] | two-way | 2 | 2 | 1 | Training | CPD | ||||
| [27] | two-way | 1 | 2 | 1 | TST | Block Tucker-2 | ||||
| [28] | one-way | 1 | ≥2 | ≥2 | Simplified KRST | Gen. Nested CPD | ||||
| [29] | one-way | 1 | ≥2 | ≥2 | TST | HONTD | ||||
| [30] | one-way | 1 | ≥2 | ≥2 | Simplified KRST | PARATUCK | ||||
| [31] | one-way | ≥2 | 3 | ≥2 | KRST | Nested CPD | ||||
| [32] | one-way | 1 | 2 | ≥2 | Matrices+Training | CPD | ||||
| [33] | one-way | 1 | 3 | 2 | TST-CPD | NTD | ||||
| [34] | one-way | 1 | 2 | ≥2 | TST | Coupled NTD | ||||
| [35] | one-way | 1 | 3 | ≥2 | Matrices+training | CPD + structured Tucker | ||||
| [36] | two-way | ≥2 | 2 | 1 | TST | Block Tucker2-CPD | ||||
| [37] | OFDM | X | one-way | 1 | 2 | 1 | Training | Structured CPD | ||
| [38] | OFDM | X | X | one-way | ≥2 | 2 | Matrices+training | CPD | ||
| [39] | X | one-way | 1 | 2 | 1 | Matrices+training | CPD | |||
| [40] | X | one-way | 1 | 1 | Simplified KRST | Nested CPD | ||||
| [41,43] | X | one-way | ≥2 | 2 | 1 | Training | CPD | |||
| [42] | X | one-way | 1 | 2 | 1 | Training | CPD | |||
| [44] | one-way | X | ≥2 | 2 | ≥2 | Simplified KRST + Training | Nested CPD | |||
| [45] | two-way | ≥2 | 2 | 1 | TST | Tucker-2 | ||||
| [46] | one-way | 1 | 3 | 2 | TST | NTD | ||||
| [47] | OFDM | one-way | 1 | 2 | 1 | TST + Simplified TSTF | Coupled NTD | |||
| [48] | OFDM | one-way | 2 | 2 | 1 | TST | TTD | |||
| [49] | OFDM | one-way | 1 | 2 | 1 | KRSTF | Nested CPD |
- Most relay systems use the AF protocol. However, some use the DF protocol. In [25], closed-form semi-blind receivers are proposed to jointly estimate individual channels and symbol matrices, using multiple Khatri-Rao product-based space-time (MKRST) and multiple Kronecker product-based space-time (MKronST) codings at the source and relay nodes. AF and DF protocols are compared with the estimate-forward (EF) protocol for which the estimated symbol matrices are directly re-encoded without a decoding step. DF and EF protocols provide significant symbol error rate (SER) performance improvements at the cost of additional computational complexity at the relay.
- Various tensor models were developed for representing the signals received at the relay and destination nodes:
- In the case of MIMO-OFDM relaying systems, different assumptions are made on the channels. In [47,49], the channels are assumed to be constant and flat Rayleigh fading, i.e., matrices, whereas in [37,38], the channels are fourth-order tensors with two space (antennas) dimensions, one frequency dimension (sub-carrier), and one time dimension, when the channels are assumed to be, respectively, time slot or frame depending.
- With most relaying systems, the information symbols to transmit form symbol matrices containing R data streams composed of N symbols each. However, in the case of OFDM systems, they can form third-order tensors , where F is the number of sub-carriers employed, as in [47].
- Depending on the transmission strategy used (in terms of time spreading) and the structure of the relay system, the transmission process is divided into several phases. For instance, in a one-way two-hop communication system, transmission may be performed in P time-blocks, each consisting of N symbol periods. Time repetition induces redundancy in the transmitted symbols, i.e., time diversity via coding.
4. Overview of Codings Used in Cooperative Systems
- The dimensions represent the numbers of transmit antennas, transmission blocks, time slots or chips, and sub-carriers, respectively. In the case of a single symbol matrix , R is the number of data streams, and N is the number of symbols per data stream. When Q symbol matrices are considered, and represent the numbers of data streams and symbols per data stream in the qth symbol matrix , respectively, with .
- With the KRST coding [50], pre- and post-coding matrices are used for encoding the information symbols contained in the symbol matrix . The pre-coding one linearly combines the M symbols of each data stream to deliver the matrix of pre-coded signals which are then spread over P slots using the post-coding matrix to give the third-order tensor of encoded signals, defined as:In scalar form, we have: and . A tall mode-2 matrix unfolding of the coded signals tensor is given by . This writing highlights the Khatri–Rao product of the pre-coded signals matrix with the post-coding matrix , which justifies the KRST name of this coding.
- A simplified version of the KRST coding, denoted SKRST, was introduced in [21,22] for designing tensor-based two-hop communication systems. This coding consists of a simple Khatri-Rao product between a coding matrix and a symbol matrix , where P is the code length. This coding introduces time spreading of symbols.The matrix of coded signals can be transformed into a third-order tensor , which satisfies the CPD model , such as:It should be noted that, contrary to SKRST coding, KRST coding does not impose that the number R of data streams be equal to the number M of transmit antennas.
- The DKRSTF coding [51] can be viewed as an OFDM extension of the SKRST one delivering a fourth-order tensor for the coded signals given by .The third-order tensor , which contains the space–frequency pre-coded signals, satisfies the CPD model and is as such: , where the matrices and are associated with the space-frequency pre-coding, whereas is the time post-coding matrix. The space–time–frequency coded signals tensor can also be written aswhich gives the following matrix unfolding: . This expression highlights the double Khatri–Rao STF (DKRSTF) coding, one corresponding to a space–frequency pre-coding by means of the matrices , whereas the other one corresponds to a time post-coding provided by the matrix . The DKRSTF coding is an extension of the SKRST one.
- Note that the KRST/TST, DKRSTF, and TSTF codings provide third-, fourth- and fifth-order tensors of coded signals, respectively, inducing a greater diversity gain for the TSTF coding in comparison with the other codings [11].A drawback shared by SKRST and DKRSTF codings concerns the constraint that the number of data streams must be equal to the number of transmit antennas , while for the KRST coding, this constraint relates to the number of symbols per data stream . That is not the case of tensor codings (TST and TSTF). See the dimensions of the symbol matrix in Table 10.
- Multiple Kronecker and Khatri–Rao products of symbol matrices, denoted MSMKron and MSMKR, can be viewed as extensions of the KRST coding [50] and as simplified versions of the MKronST and MKRST codings proposed in [25] without a precoding matrix.With these codings, each symbol of a given symbol matrix is duplicated at the transmission via the Khatri–Rao and Kronecker products of with the other symbol matrices , .These multiple KR and Kron products induce a mutual ST spreading of transmitted symbols and therefore an extra ST diversity. Note that efficient decoding methods based on rank-one matrix/tensor approximations can be found in [11,13,25,33] for recovering each individual symbol matrix from an estimated KR or Kron product of multiple symbol matrices.
5. Overview of Two-Hop Systems
- Relay-assisted two-hop system using SKRST codings at the source and relay nodes, with AF protocol; see Table 11;
- Relay-assisted two-hop system using SKRST-MSMKR codings at the source and relay nodes, with DF protocol and time-varying multipath channel; see Table 12;
- Relay-assisted two-hop system using third-order TST codings at the source and relay nodes, with AF and DF protocols; see Table 13; an extension of the multi-user case is also considered, illustrated by means of Figure 8.
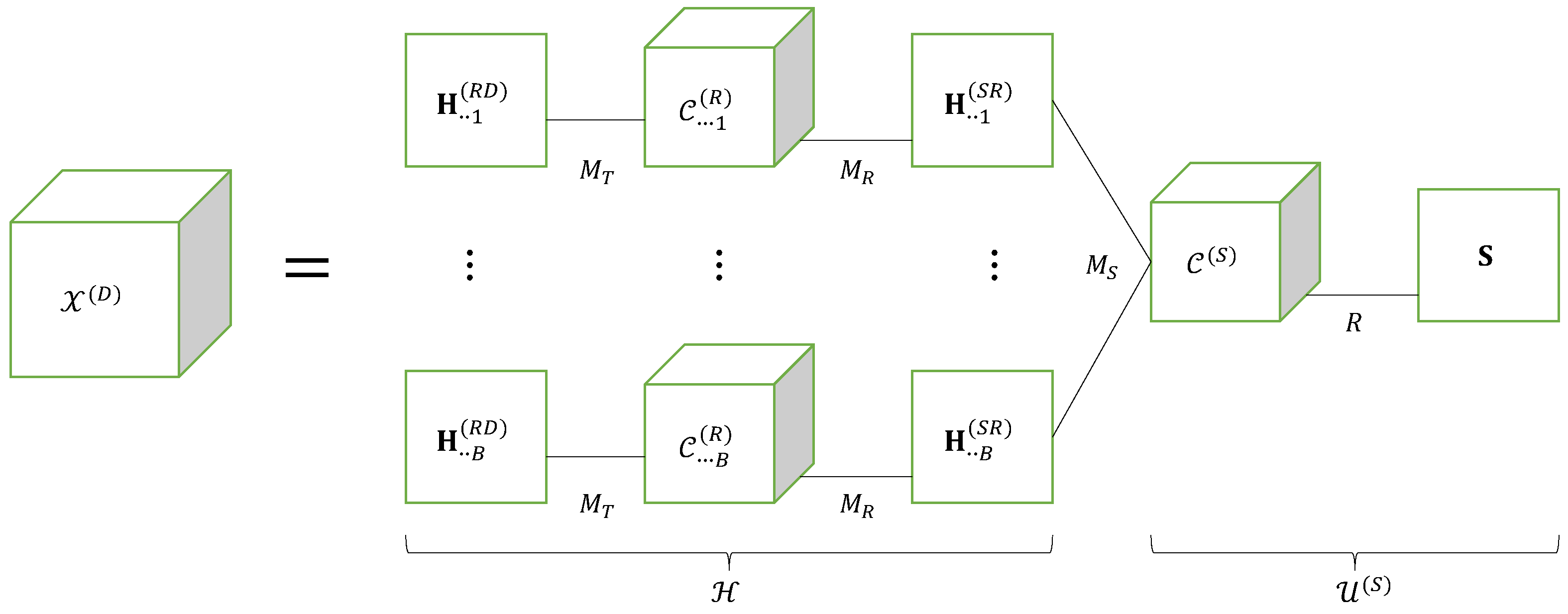
- Multi-relay-assisted system using third-order TST codings at the source and relay nodes, with AF protocol and B relays in parallel and with each relay equipped with a different TST coding; see Table 14;
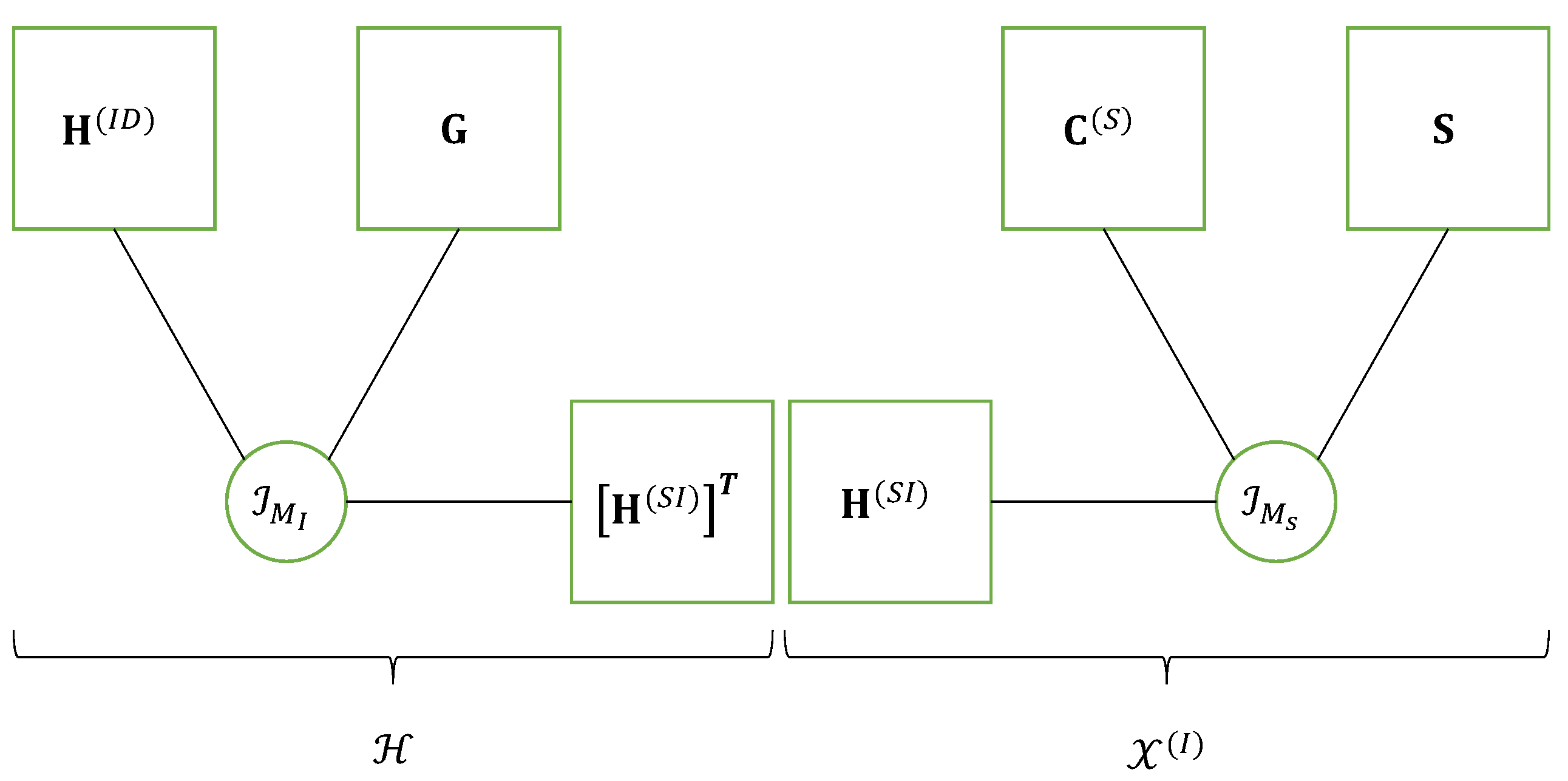
- IRS-assisted system using SKRST coding at the source; see Table 15.
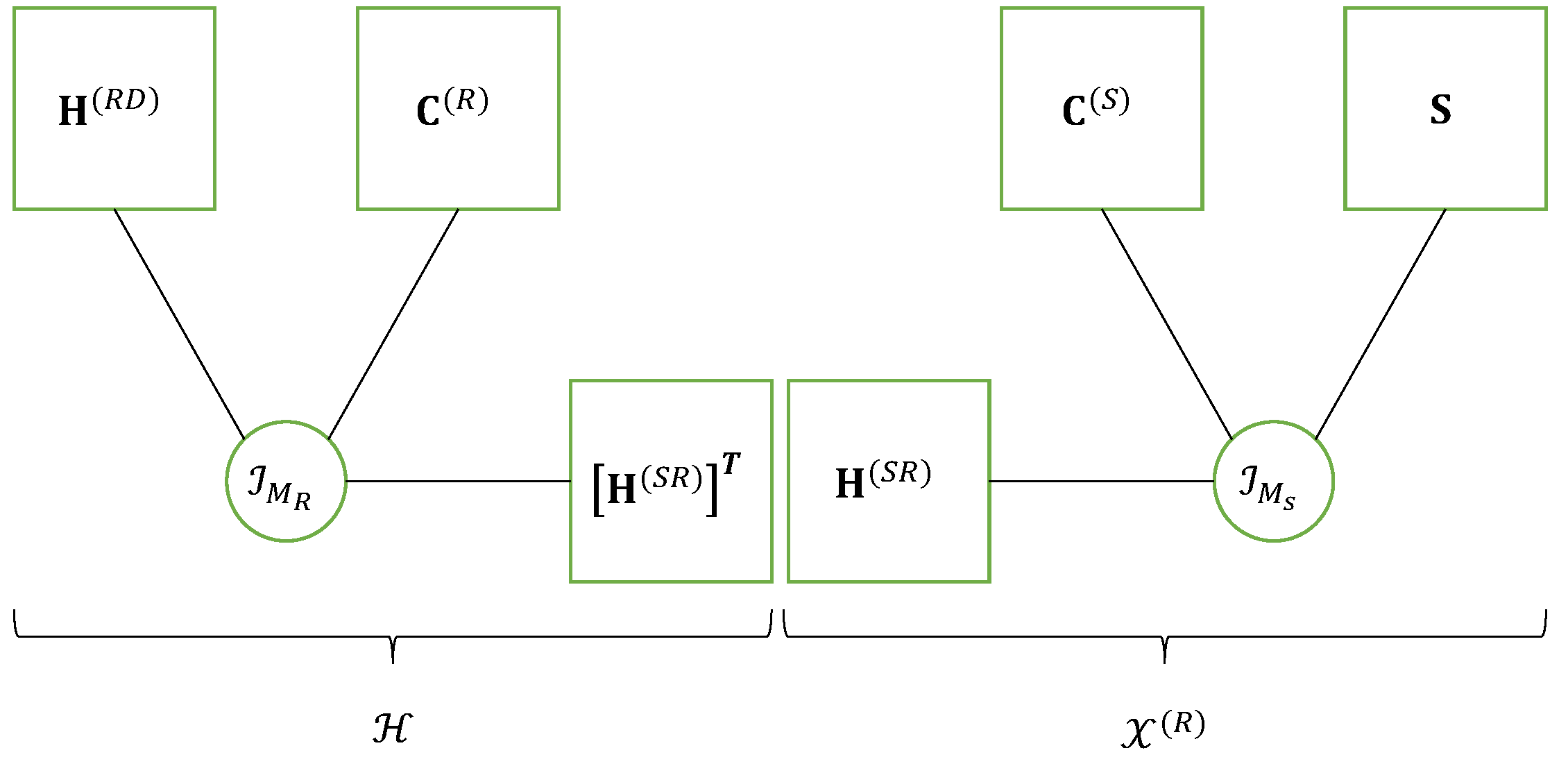
5.1. Relay Two-Hop System Using SKRST Codings
| Ref./Signals | Symbols/Codings | Channels | Encoded/Received Signals | Dimensions |
|---|---|---|---|---|
| [22] | ||||
| First hop | ||||
| Signals coded at source | ||||
| Signals received at relay | ||||
| Second hop | ||||
| Signals coded at relay | ||||
| Signals received at destination | ||||
5.2. Relay Two-Hop System Using SKRST-MSMKR Codings, with DF Protocol and Time-Varying Multipath Channel
5.2.1. SKRST-MSMKR Coding
5.2.2. Channel Modeling
5.2.3. Signals Received at the Relay
5.2.4. Signals Received at Destination
| Signals | Symbols/Codings | Channels | Encoded/Received Signals | Dimensions |
|---|---|---|---|---|
| for | ||||
| First hop | ||||
| Signals coded at source | ||||
| Signals transmitted by source | ||||
| Signals received at relay | ||||
| Second hop | ||||
| Signals coded at relay | ||||
| Signals transmitted by relay | ||||
| Signals received at destination | ||||
5.3. Relay Two-Hop Systems Using TST Codings
| Ref./Signals | Symbols/Codings | Channels | Encoded/Received Signals | Dimensions |
|---|---|---|---|---|
| [24] | ||||
| First hop | ||||
| Signals coded at source | ||||
| Signals received at relay | ||||
| Second hop | ||||
| Signals coded at relay | ||||
| Signals received at destination |
5.4. Multi-User Relay System Using TST Codings
5.5. Parallel Multi-Relay Two-Hop Systems Using TST Codings
| Ref. Signals | Symbols/Codings | Channels | Encoded/Received Signals | Dimensions |
|---|---|---|---|---|
| [34] | ||||
| First hop | ||||
| Signals coded at source | ||||
| Signals received at relay | ||||
| Second hop | ||||
| Signals coded at relay | ||||
| Signals received at destination |
5.6. IRS-Assisted Two-Hop Systems Using SKRST Coding
| Signals | Symbols/Coding | Channels | Received Signals | Dimensions |
|---|---|---|---|---|
| First hop | ||||
| Signals coded at source | ||||
| Signals received at IRS | ||||
| Signals reflected by IRS at time slot t | ||||
| Second hop | ||||
| Signals received at destination at time slot t |
6. Conclusions and Perspectives
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AF | Amplify-and-forward |
| CPD | Canonical polyadic decomposition |
| DF | Decode-and-forward |
| DoA | Direction of arrival |
| DoD | Direction of departure |
| IRS | Intelligent reflecting surface |
| KronF | Kronecker factorization |
| KRF | Khatri-Rao factorization |
| KRST | Khatri-Rao space-time |
| KRSTF | Khatri-Rao space-time-frequency |
| MIMO | Multiple-input multiple-output |
| MSMKR | Multiple symbol matrices Khatri-Rao product |
| MSMKron | Multiple symbol matrices Kronecker product |
| mmW | Millimeter-wave |
| OFDM | Orthogonal frequency-division multiplexing |
| PARAFAC | Parallel factor analysis |
| SKRST | Simplified Khatri-Rao space-time |
| STF | Space-time-frequency |
| SVD | Singular-value decomposition |
| TST | Tensor space-time |
| TSTF | Tensor space-time-frequency |
| UAV | Unmanned aerial vehicular |
References
- Sendonaris, A.; Erkip, E.; Aazhang, B. User cooperation diversity. Part I: System description. IEEE Trans. Commun. 2003, 51, 1927–1938. [Google Scholar] [CrossRef] [Green Version]
- Sendonaris, A.; Erkip, E.; Aazhang, B. User cooperation diversity. Part II: Implementation aspects and performance analysis. IEEE Trans. Commun. 2003, 51, 1939–1948. [Google Scholar] [CrossRef] [Green Version]
- Di Renzo, M.; Ntontin, K.; Song, J.; Danufane, F.; Qian, X.; Lazarakis, F.; De Rosny, J.; Phan-Huy, D.T.; Simeone, O.; Zhang, R.; et al. Reconfigurable intelligent surfaces vs. relaying: Differences, similarities, and performance comparison. IEEE Open J. Commun. Soc. 2020, 1, 798–807. [Google Scholar] [CrossRef]
- Boulogeorgos, A.A.A.; Alexiou, A. Performance analysis of reconfigurable intelligent surface-assisted wireless systems and comparison with relaying. IEEE Access 2020, 8, 94463–94483. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Feng, W.; Wang, J.; Chen, Y.; Wang, X.; Ge, N.; Lu, J. UAV-aided MIMO communications for 5G Internet of Things. IEEE Internet Things J. 2019, 6, 1731–1740. [Google Scholar] [CrossRef] [Green Version]
- Hua, M.; Yang, L.; Wu, Q.; Pan, C.; Li, C.; Swindlehurst, A. UAV-assisted intelligent reflecting surface symbiotic radio system. IEEE Trans. Wirel. Commun. 2021, 20, 5769–5785. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Poor, H. Intelligent reflecting surface enhanced multi-UAV NOMA networks. IEEE J. Sel. Areas Commun. 2021, 39, 3051–3066. [Google Scholar] [CrossRef]
- Swindlehurst, L.; Ayanoglu, E.; Heydari, P.; Capolino, F. Millimeter-wave massive MIMO: The next wireless revolution? IEEE Commun. Mag. 2014, 52, 56–62. [Google Scholar] [CrossRef]
- Heath, R.; Gonzalez-Prelcic, N.; Rangan, S.; Roh, W.; Sayeed, A. An overview of signal processing techniques for millimeter wave MIMO system. IEEE J. Selec. Top. Signal Process. 2016, 10, 436–453. [Google Scholar] [CrossRef]
- da Costa, M.; Favier, G.; Romano, J. Tensor modelling of MIMO communication systems with performance analysis and Kronecker receivers. Signal Process. 2018, 145, 304–316. [Google Scholar] [CrossRef] [Green Version]
- Favier, G.; Rocha, D.S. Overview of Tensor-based Cooperative MIMO Communication Systems—Part 2: Semi-blind receivers. 2023; Under preparation. [Google Scholar]
- Favier, G. Matrix and Tensor Decompositions in Signal Processing—Volume 2; Wiley: Hoboken, NJ, USA, 2021. [Google Scholar]
- Cichocki, A.; Mandic, D.; de Lathauwer, L.; Zhou, G.; Zhao, Q.; Caiafa, C.; Phan, A. Tensor decompositions for signal applications: From two-way to multiway component analysis. IEEE Signal Process. Mag. 2015, 32, 145–163. [Google Scholar] [CrossRef] [Green Version]
- Favier, G.; de Almeida, A.L.F. Tensor space-time-frequency coding with semi-blind receivers for MIMO wireless communication systems. IEEE Trans. Signal Process. 2014, 62, 5987–6002. [Google Scholar] [CrossRef]
- Favier, G. Décompositions Matricielles et Tensorielles en Traitement du Signal—Volume 2; ISTE Editions: London, UK, 2022. [Google Scholar]
- Hitchcock, F.L. The expression of a tensor or a polyadic as a sum of products. J. Math. Phys. 1927, 6, 164–189. [Google Scholar] [CrossRef]
- Harshman, R.A. Foundations of the PARAFAC procedure: Models and conditions for an “explanatory” multimodal factor analysis. UCLA Work. Pap. Phon. 1970, 16, 1–84. [Google Scholar]
- Favier, G.; de Almeida, A.L.F. Overview of constrained PARAFAC models. EURASIP J. Adv. Signal Process. 2014, 2014, 142. [Google Scholar] [CrossRef]
- Tang, W.; Chen, X.; Chen, M.Z.; Dai, J.Y.; Han, Y.; Cheng, Q.; Li, G.Y.; Cui, T.J. On channel reciprocity in reconfigurable intelligent surface assisted wireless network. IEEE Wirel. Commun. 2021, 28, 94–101. [Google Scholar] [CrossRef]
- Ximenes, L.R.; Favier, G.; de Almeida, A.L.; Silva, Y.C. PARAFAC-PARATUCK semi-blind receivers for two-hop cooperative MIMO relay systems. IEEE Trans. Signal Process. 2014, 62, 3604–3615. [Google Scholar] [CrossRef]
- Ximenes, L.R.; Favier, G.; de Almeida, A.L. Semi-blind receivers for non-regenerative cooperative MIMO communications based on nested PARAFAC modeling. IEEE Trans. Signal Process. 2015, 63, 4985–4998. [Google Scholar] [CrossRef]
- Ximenes, L.R.; Favier, G.; de Almeida, A.L. Closed-form semi-blind receiver for MIMO relay systems using double Khatri–Rao space-time coding. IEEE Signal Process. Lett. 2016, 23, 316–320. [Google Scholar] [CrossRef]
- Favier, G.; Fernandes, C.A.R.; de Almeida, A.L. Nested Tucker tensor decomposition with application to MIMO relay systems using tensor space–time coding (TSTC). Signal Process. 2016, 128, 318–331. [Google Scholar] [CrossRef]
- Freitas, W., Jr.; Favier, G.; de Almeida, A.L. Generalized Khatri-Rao and Kronecker space-time coding for MIMO relay systems with closed-form semi-blind receivers. Signal Process. 2018, 151, 19–31. [Google Scholar] [CrossRef] [Green Version]
- Roemer, F.; Haardt, M. Tensor-based channel estimation and iterative refinements for two-way relaying with multiple antennas and spatial reuse. IEEE Trans. Signal Process. 2010, 58, 5720–5735. [Google Scholar] [CrossRef]
- Freitas, W., Jr.; Favier, G.; de Almeida, A.L. Tensor-based joint channel and symbol estimation for two-way MIMO relaying systems. IEEE Signal Process. Lett. 2019, 26, 227–231. [Google Scholar] [CrossRef]
- Freitas, W.d.C.; Favier, G.; de Almeida, A.L. Sequential closed-form semiblind receiver for space-time coded multihop relaying systems. IEEE Signal Process. Lett. 2017, 24, 1773–1777. [Google Scholar] [CrossRef] [Green Version]
- Rocha, D.S.; Favier, G.; Fernandes, C.A.R. Closed-form receiver for multi-hop MIMO relay systems with tensor space-time coding. J. Commun. Inf. Syst. 2019, 34, 50–54. [Google Scholar] [CrossRef]
- de Oliveira, P.M.R.; Fernandes, C.A.R.; Favier, G.; Boyer, R. PARATUCK semi-blind receivers for relaying multi-hop MIMO systems. Digit. Signal Process. 2019, 92, 127–138. [Google Scholar] [CrossRef] [Green Version]
- Han, X.; Ying, J.; Liu, A.; Ma, L. A nested tensor-based receiver employing triple constellation precoding for three-hop cooperative communication systems. Digit. Signal Process. 2023, 133, 103862. [Google Scholar] [CrossRef]
- Rong, Y.; Khandaker, R.; Xiang, Y. Channel estimation of dual-hop MIMO relay system via parallel factor analysis. IEEE Trans. Wirel. Commun. 2012, 11, 2224–2233. [Google Scholar] [CrossRef]
- Sokal, B.; de Almeida, A.L.; Haardt, M. Semi-blind receivers for MIMO multi-relaying systems via rank-one tensor approximations. Signal Process. 2020, 166, 107254. [Google Scholar] [CrossRef]
- Rocha, D.S.; Fernandes, C.A.R.; Favier, G. MIMO multi-relay systems with tensor space-time coding based on coupled nested Tucker decomposition. Digit. Signal Process. 2019, 89, 170–185. [Google Scholar] [CrossRef]
- Cavalcante, Í.V.; de Almeida, A.L.; Haardt, M. Joint channel estimation for three-hop MIMO relaying systems. IEEE Signal Process. Lett. 2015, 22, 2430–2434. [Google Scholar] [CrossRef]
- Du, J.; Han, M.; Jin, L.; Hua, Y.; Li, X. Semi-blind receivers for multi-user massive MIMO relay systems based on block Tucker2-PARAFAC tensor model. IEEE Access 2020, 8, 32170–32186. [Google Scholar] [CrossRef]
- Lin, Y.; Matthaiou, M.; You, X. Tensor-based channel estimation for millimeter wave MIMO-OFDM with dual-wideband effects. IEEE Trans. Commun. 2020, 68, 4218–4232. [Google Scholar] [CrossRef]
- Lin, Y.; Jin, S.; Matthaiou, M.; You, X. Tensor-based channel estimation for hybrid IRS-assisted MIMO-OFDM. IEEE Trans. Wirel. Commun. 2021, 20, 3770–3784. [Google Scholar] [CrossRef]
- Lin, H.; Zhang, G.; Mo, W.; Lan, T.; Zhang, Z.; Ye, S. PARAFAC-Based Channel Estimation for Relay Assisted mmWave Massive MIMO Systems. In Proceedings of the 7th International Conference on Computer and Communications (ICCC), Chengdu, China, 10–13 December 2021; pp. 1869–1874. [Google Scholar]
- Du, J.; Han, M.; Chen, Y.; Jin, L.; Gao, F. Tensor-based joint channel estimation and symbol detection for time-varying mmWave massive MIMO systems. IEEE Trans. Signal Process. 2021, 69, 6251–6266. [Google Scholar] [CrossRef]
- Wei, L.; Huang, C.; Alexandropoulos, G.C.; Yuen, C. Parallel factor decomposition channel estimation in RIS-assisted multi-user MISO communication. arXiv 2020, arXiv:2001.09413. [Google Scholar]
- de Araújo, G.T.; de Almeida, A.L.; Boyer, R. Channel estimation for intelligent reflecting surface assisted MIMO systems: A tensor modeling approach. IEEE J. Sel. Top. Signal Process. 2021, 15, 789–802. [Google Scholar] [CrossRef]
- Wei, L.; Huang, C.; Alexandropoulos, G.C.; Yang, Z.; Yuen, C.; Zhang, Z. Joint channel estimation and signal recovery in RIS-assisted multi-user MISO communications. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–6. [Google Scholar]
- Du, J.; Luo, X.; Jin, L.; Gao, F. Robust tensor-based algorithm for UAV-assisted IoT communication systems via nested PARAFAC analysis. IEEE Trans. Signal Process. 2022, 70, 5117–5132. [Google Scholar] [CrossRef]
- Du, J.; Ye, S.; Jin, L.; Li, X.; Ngo, H.Q.; Dobre, O. Tensor-based joint channel estimation for multi-way massive MIMO hybrid relay systems. IEEE Trans. Veh. Technol. 2022, 71, 9571–9585. [Google Scholar] [CrossRef]
- Rocha, D.S.; Favier, G.; Fernandes, C.A.R. Tensor coding for three-hop MIMO relay systems. In Proceedings of the 2018 IEEE Symposium on Computers and Communications (ISCC), Natal, Brazil, 25–28 June 2018; pp. 00384–00389. [Google Scholar]
- Rocha, D.S.; Fernandes, C.A.R.; Favier, G. Space-Time-Frequency (STF) MIMO Relaying System with Receiver Based on Coupled Tensor Decompositions. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 328–332. [Google Scholar]
- Zniyed, Y.; Boyer, R.; de Almeida, A.L.; Favier, G. Tensor-train modeling for MIMO-OFDM tensor coding-and-forwarding relay systems. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruña, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar]
- Wang, Q.; Zhang, L.; Li, B.; Zhu, Y. Space-time-frequency coding for MIMO relay system based on tensor decomposition. Radioelectron. Commun. Syst. 2020, 63, 77–87. [Google Scholar] [CrossRef]
- Sidiropoulos, N.; Budampati, R. Khatri-Rao space time codes. IEEE Trans. Signal Process. 2002, 50, 2396–2407. [Google Scholar] [CrossRef] [Green Version]
- de Almeida, A.L.; Favier, G. Double Khatri–Rao space-time-frequency coding using semi-blind PARAFAC based receiver. IEEE Signal Process. Lett. 2013, 20, 471–474. [Google Scholar] [CrossRef]
- Favier, G.; da Costa, M.; de Almeida, A.; Romano, J. Tensor space-time (TST) coding for MIMO wireless communication systems. Signal Process. 2012, 92, 1079–1092. [Google Scholar] [CrossRef]
- Randriambelonoro, S.V.N.; Favier, G.; Boyer, R. Semi-blind joint symbols and multipath parameters estimation of MIMO systems using KRST/MKRSM coding. Digit. Signal Process. 2021, 109, 102908. [Google Scholar] [CrossRef]
- Couras, M.; de Pinho, P.; Favier, G.; Zarzoso, V.; de Almeida, A.; da Costa, J. Semi-blind receivers based on a coupled nested Tucker-PARAFAC model for dual-polarized MIMO systems using combined TST and MSMKron codings. Digit. Signal Process. 2023, 137, 104043. [Google Scholar] [CrossRef]










| Symbols | Definitions |
|---|---|
| or | set of real or complex numbers |
| Set of first N integers | |
| Set of N indices | |
| Size of an Nth-order tensor | |
| a, , , | Scalar, column vector, matrix, tensor |
| or | -th element of |
| Transpose of | |
| Complex conjugate of | |
| Moore-Penrose pseudo-inverse of | |
| i-th (j-th) row (column) of | |
| or | Mode-n tensor slice |
| Tall mode-N matrix unfolding of | |
| nth canonical basis vector of the Euclidean space | |
| Vectorization operator | |
| Diagonalization operator which forms a matrix from its vector argument | |
| Diagonal matrix whose diagonal entries are the elements of the i-th row of | |
| Block-diagonalization operator | |
| Inner product | |
| Frobenius norm | |
| ∘ | Outer product |
| ⋄ | Khatri-Rao product |
| ⊗ | Kronecker product |
| ⋈ | Block Kronecker product |
| Mode-n product | |
| Contraction operation | |
| Concatenation operation along mode n |
| Tensors | Operations | Definitions |
|---|---|---|
| with |
| Dimensions | Products | Matrix Unfoldings | Dimensions of Resulting Tensors |
|---|---|---|---|
with |
| Vectors/Matrices/Tensors | Outer Products | Spaces | Orders |
|---|---|---|---|
| , | P | ||
| Matrices/Tensors | Outer Products | Elements of | Indices |
|---|---|---|---|
| Tucker Decomposition | CPD | |
|---|---|---|
| Scalar writing | ||
| Writing with | ||
| mode-n products | ||
| Outer products | ||
| Matricization | ||
| Tucker Decomposition | CPD | |
|---|---|---|
| Scalar writing | ||
| Writing with | ||
| mode-n products | ||
| Outer products | ||
| Matrix unfoldings | ||
| Tucker-(2,3) Model | Tucker-(1,3) Model | |
|---|---|---|
| Scalar expression | ||
| With mode-n products | ||
| Matrix unfoldings | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Favier, G.; Rocha, D.S. Overview of Tensor-Based Cooperative MIMO Communication Systems—Part 1: Tensor Modeling. Entropy 2023, 25, 1181. https://doi.org/10.3390/e25081181
Favier G, Rocha DS. Overview of Tensor-Based Cooperative MIMO Communication Systems—Part 1: Tensor Modeling. Entropy. 2023; 25(8):1181. https://doi.org/10.3390/e25081181
Chicago/Turabian StyleFavier, Gérard, and Danilo Sousa Rocha. 2023. "Overview of Tensor-Based Cooperative MIMO Communication Systems—Part 1: Tensor Modeling" Entropy 25, no. 8: 1181. https://doi.org/10.3390/e25081181