
Fuzzy Adaptive Command-Filter Control of Incommensurate Fractional-Order Nonlinear Systems

Abstract
:1. Introduction
- 1.
- An adaptive backstepping recursive algorithm was developed for strict feedback incommensurate nonlinear FOSs, and the stability of closed-loop systems is analyzed with the indirect Lyapunov method. Different from the results in [41,42], we considered a more general kind of systems, and the approach presented in this work has more abundant applications in practice [43,44,45]. Accordingly, it introduces challenges in the analysis and synthesis of controller design.
- 2.
- The command-filter control scheme was first proposed for incommensurate FOSs to address the dimension explosion issue, and a fractional-order filter was designed. The fuzzy approximation errors were estimated with adaptive update laws. In contrast to the works in [20,21,22], the information of the high-order differentials of reference signals is not essential. In addition, closed-loop control performance can be guaranteed.
- 3.
- The unknown control coefficient is considered in this paper, and the parameter update law was constructed to estimate the control coefficient. Due to the sign function introduced into the controller, the chattering phenomenon occurs. The hyperbolic tangent function was utilized to replace the sign function, proving that the stability of the closed-loop system is still guaranteed.
2. Problem Statement and Preliminaries
2.1. System Descriptions
2.2. Fuzzy Logic Systems
3. Command-Filter Control Scheme Design
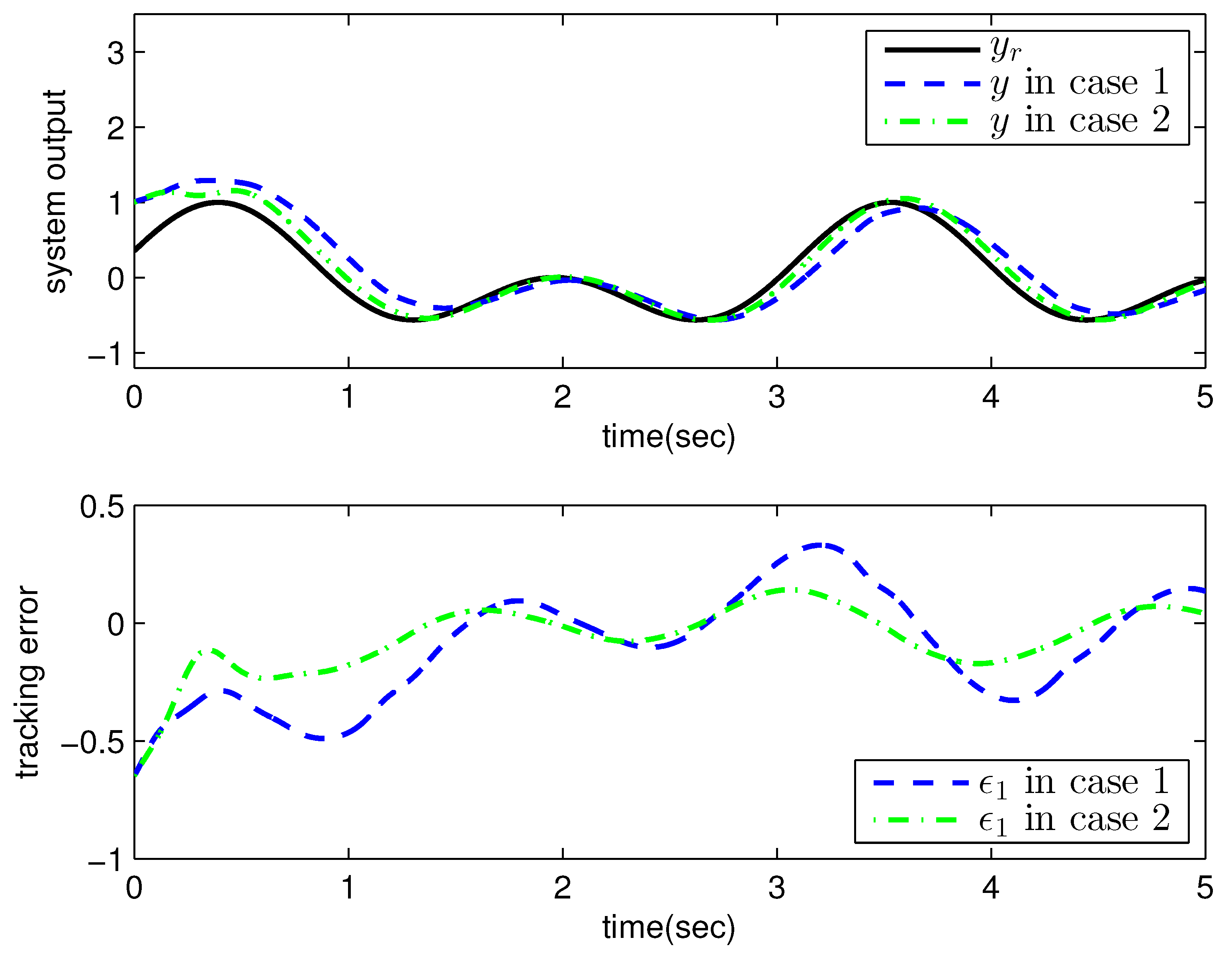
4. Numerical Examples
- 1.
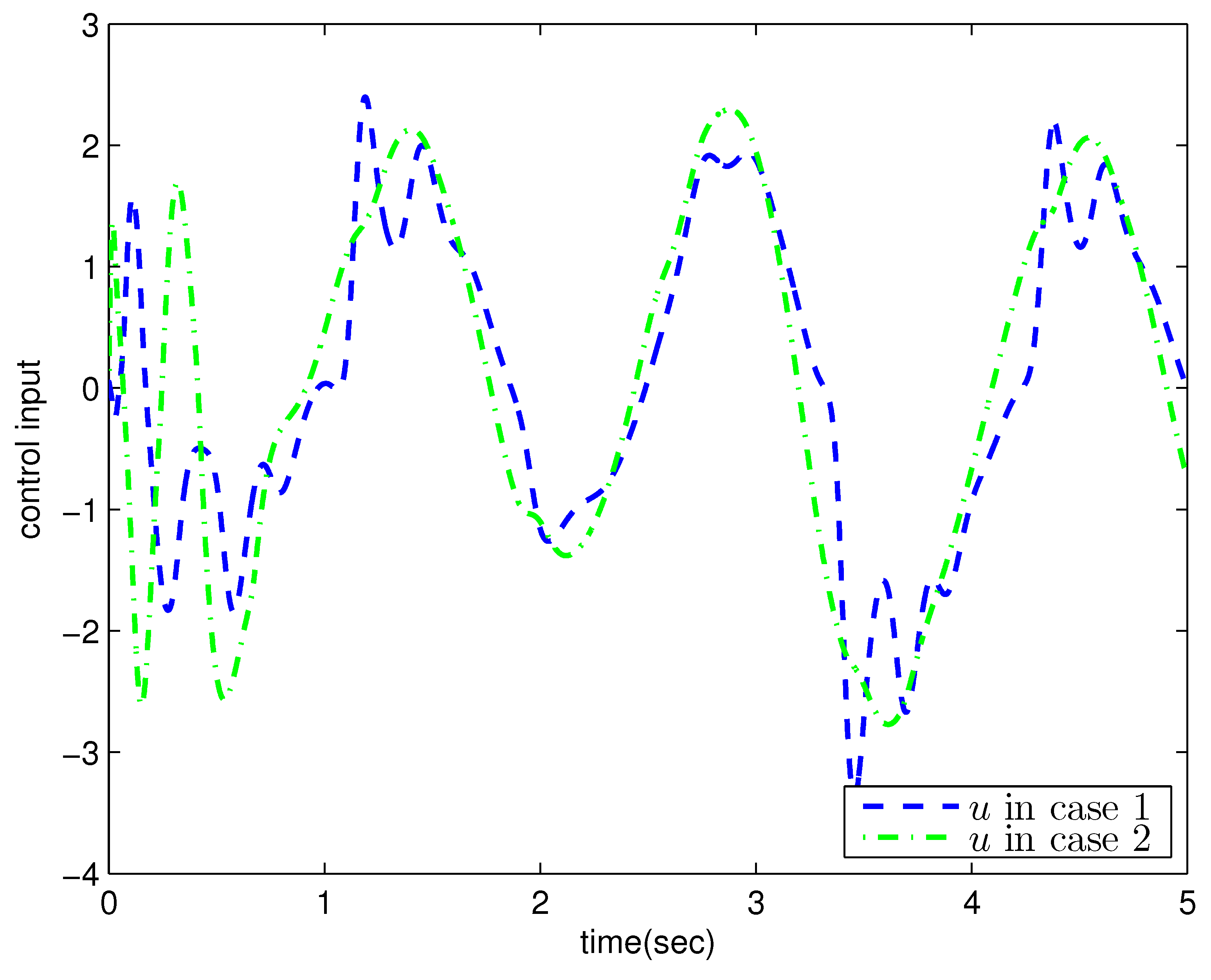
- As the c parameter increases, the overall tracking error decreases, the tracking effect improves, and the control cost correspondingly increases. Especially in the transitional process, this often caused the output of the system to overshoot and oscillate. If this performance is required, a differentiator or other methods could be utilized to arrange the transitional process.
- 2.
- The G parameter does not have a linear relationship with the tracking error. In these simulation results, tracking performance was the best when G was 0.8. The adaptive command-filter dynamic surface control combined with intelligent optimization algorithms to tune parameters is a promising future research direction.
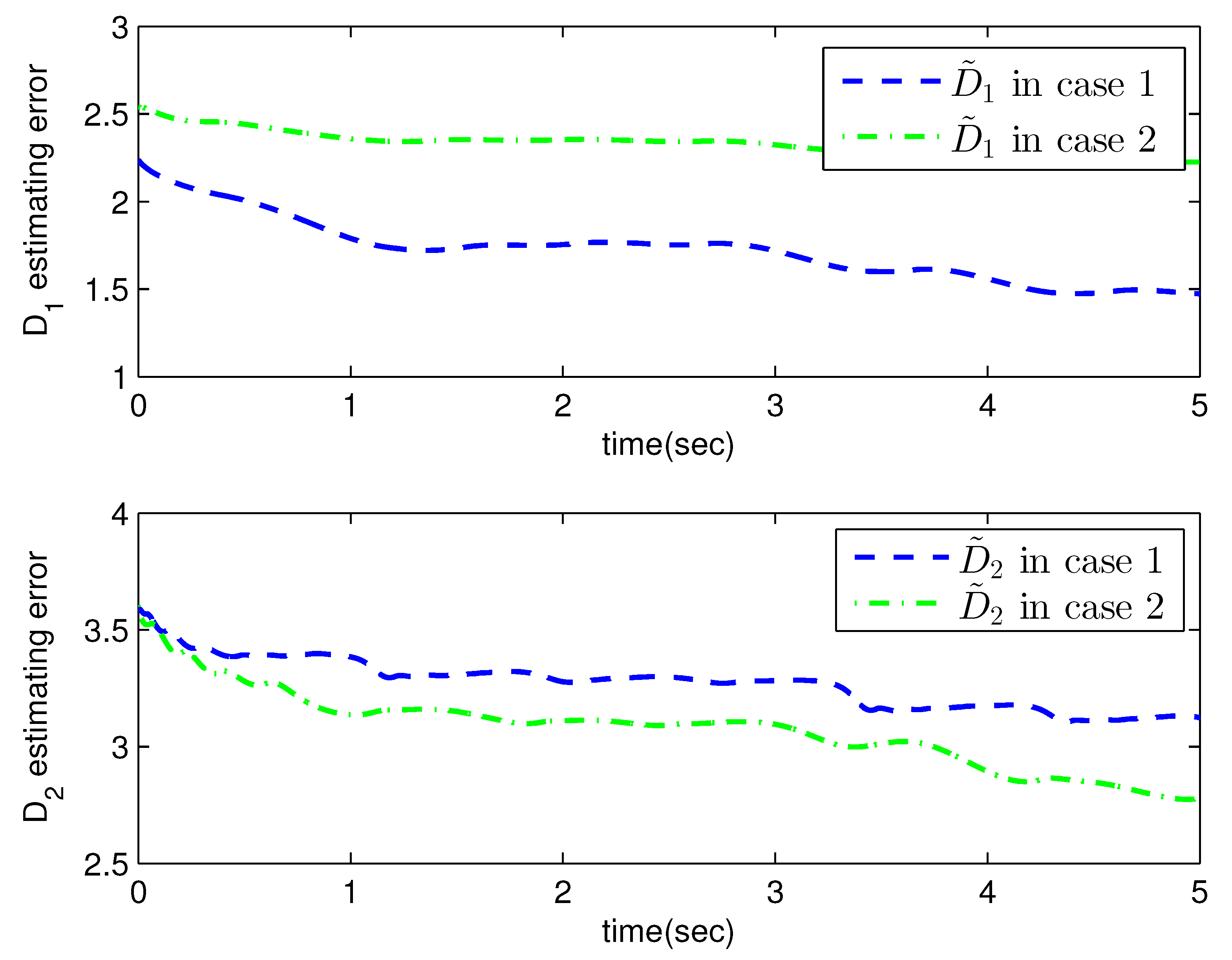
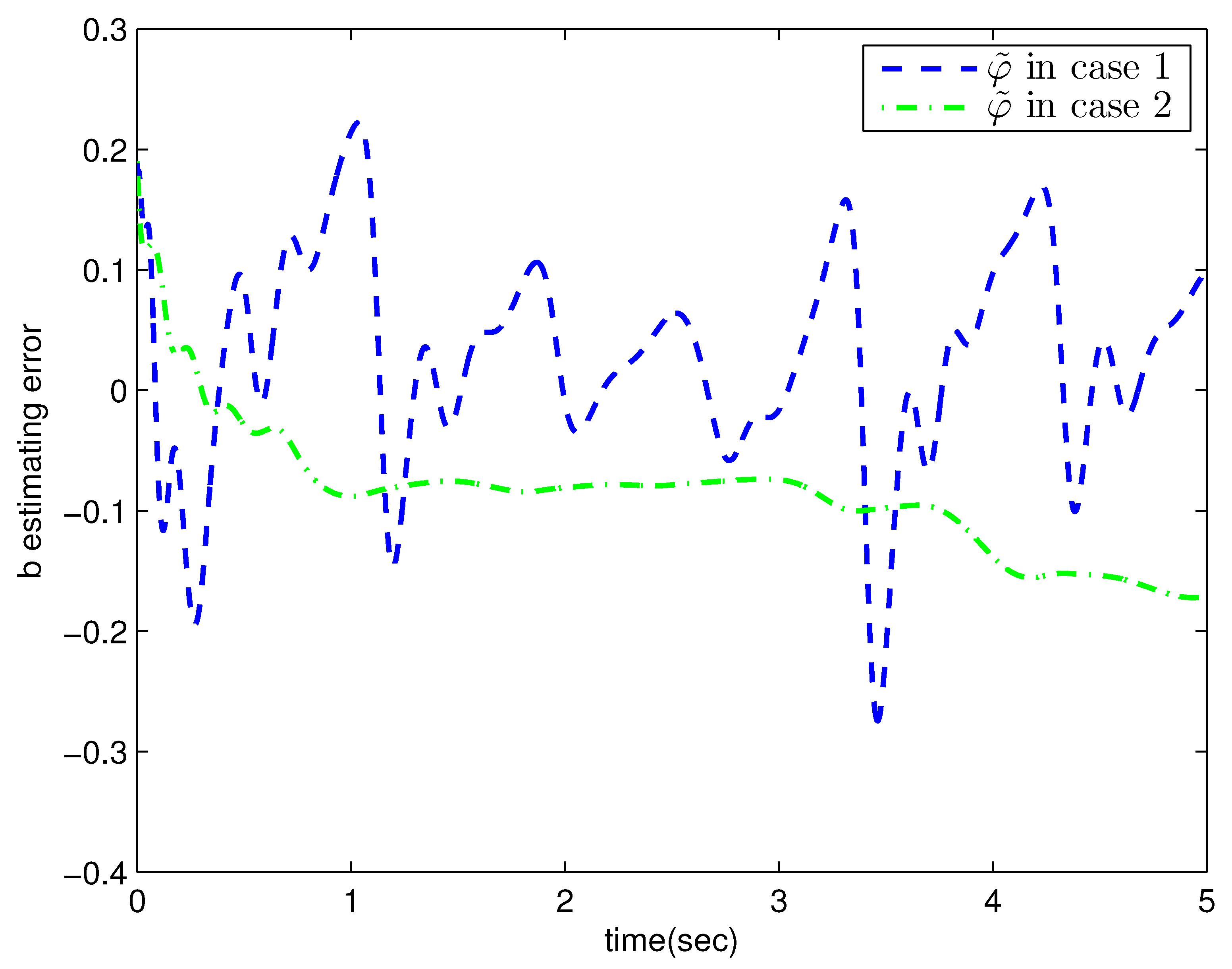
- 3.
- As the k parameter increases, the norm of the tracking error decreased, and tracking performance improves. The estimation effect of the bound of approximation error improves, while the estimation effect of the unknown control coefficient worsens.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Luo, Y.; Chen, Y.; Pi, Y. Experimental study of fractional order proportional derivative controller synthesis for fractional order systems. Mechatronics 2011, 21, 204–214. [Google Scholar] [CrossRef]
- Cao, J.; Ma, C.; Jiang, Z.; Liu, S. Nonlinear dynamic analysis of fractional order rub-impact rotor system. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1443–1463. [Google Scholar] [CrossRef]
- Chen, D.; Liu, C.; Wu, C.; Liu, Y.; Ma, X.; You, Y. A new fractional-order chaotic system and its synchronization with circuit simulation. Circuit Syst. Signal Process 2012, 31, 1599–1613. [Google Scholar] [CrossRef]
- Wang, B.; Liu, Z.; Li, S.; Moura, S.; Peng, H. State-of-charge estimation for lithium-ion batteries based on a nonlinear fractional model. IEEE Trans. Control Syst. Technol. 2017, 25, 3–11. [Google Scholar] [CrossRef]
- Lu, J.; Chen, G. Robust stability and stabilization of fractional-order interval systems: An LMI approach. IEEE Trans. Autom. Control 2009, 54, 1294–1299. [Google Scholar]
- Farges, C.; Moze, M.; Sabatier, J. Pseudo-state feedback stabilization of commensurate fractional order systems. Automatica 2010, 46, 1730–1734. [Google Scholar] [CrossRef]
- Lan, Y.; Zhou, Y. LMI-based robust control of fractional-order uncertain linear systems. Comput. Math. Appl. 2011, 62, 1460–1471. [Google Scholar] [CrossRef] [Green Version]
- Ibrir, S.; Bettayeb, M. New sufficient conditions for observer-based control of fractional-order uncertain systems. Automatica 2015, 59, 216–223. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag CLeffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef] [Green Version]
- Trigeassou, J.; Maamri, N.; Sabatier, J.; Oustaloup, A. A Lyapunov approach to the stability of fractional differential equations. Signal Process 2011, 91, 437–445. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.; Wang, H.; Huo, Y.; Luo, J. Adaptive synchronization for a class of uncertain fractional-order neural networks. Entropy 2015, 17, 7185–7200. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Wang, Z.; Li, Y.; Lu, J. Design of fuzzy state feedback controller for robust stabilization of uncertain fractional-order chaotic systems. J. Frankl. Inst. 2014, 351, 5480–5493. [Google Scholar] [CrossRef]
- Boroujeni, E.; Momeni, H. Non-fragile nonlinear fractional order observer design for a class of nonlinear fractional order systems. Signal Process 2012, 92, 2365–2370. [Google Scholar] [CrossRef]
- Ni, J.; Liu, L.; Liu, C.; Hu, X. Fractional order fixed-time nonsingular terminal sliding mode synchronization and control of fractional order chaotic systems. Nonlinear Dyn. 2017, 89, 2065–2083. [Google Scholar] [CrossRef]
- Sun, G.; Ma, Z. Practical tracking control of linear motor with adaptive fractional order terminal sliding mode control. Mechatronics 2017, 22, 2643–2653. [Google Scholar] [CrossRef]
- Ding, D.; Qi, D.; Wang, Q. Non-linear Mittag-Leffler stabilisation of commensurate fractional-order non-linear systems. IET Control Theory Appl. 2014, 9, 681–690. [Google Scholar] [CrossRef]
- Ding, D.; Qi, D.; Peng, J.; Wang, Q. Asymptotic peseudo-state stabilization of commensurate fractional-order nonlinear systems with additive disturbance. Nonlinear Dyn. 2015, 81, 667–677. [Google Scholar] [CrossRef]
- Victor, S.; Malti, R.; Garnier, H.; Oustaloup, A. Parameter and differentiation order estimation in fractional models. Automatica 2013, 49, 926–935. [Google Scholar] [CrossRef]
- Wang, B.; Li, S.E.; Peng, H.; Liu, Z. Fractional-order modeling and parameter identification for lithium-ion batteries. J. Power Sources 2015, 293, 151–161. [Google Scholar] [CrossRef]
- Wei, Y.; Chen, Y.; Liang, S.; Wang, Y. A novel algorithm on adaptive backstepping control of fractional order systems. Neurocomputing 2015, 165, 395–402. [Google Scholar] [CrossRef]
- Wei, Y.; Peter, W.; Yao, Z.; Wang, Y. Adaptive backstepping output feedback control of a class of nonlinear fractional order systems. Nonlinear Dyn. 2016, 86, 1047–1056. [Google Scholar] [CrossRef]
- Sheng, D.; Wei, Y.; Cheng, S.; Wang, Y. Observer-based adaptive backstepping control for fractional order systems with input saturation. ISA Trans. 2018, 82, 18–29. [Google Scholar] [CrossRef] [PubMed]
- Swaroop, D.; Hedrick, J.; Yip, P.; Gerdes, J. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Tong, D.; Chen, Q.; Zhou, W.; Xu, Y. Adaptive NN control for nonlinear systems with uncertainty based on dynamic surface control. Neurocomputing 2021, 421, 161–172. [Google Scholar] [CrossRef]
- Ning, B.; Long, Q.; Zuo, Z.; Jin, J.; Zheng, J. Collective behaviors of mobile robots beyond the nearest neighbor rules with switching topology. IEEE Trans. Cybern. 2018, 48, 1577–1590. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, G.; Gao, Q. Bounded control for preserving connectivity of multi-agent systems using the constraint function approach. IET Control. Theory Appl. 2012, 6, 1752–1757. [Google Scholar] [CrossRef]
- Cheng, S.; Li, H.; Guo, Y.; Pan, T.; Fan, Y. Event-triggered optimal nonlinear systems control based on state observer and neural network. J. Syst. Sci. Complex. 2023, 36, 222–238. [Google Scholar] [CrossRef]
- Wang, L.; Chen, C. Adaptive fuzzy dynamic surface control of nonlinear constrained systems with unknown virtual control coefficients. IEEE Trans. Fuzzy Syst. 2020, 28, 1737–1747. [Google Scholar] [CrossRef]
- Yoo, S. Neural-network-based adaptive resilient dynamic surface control against unknown deception attacks of uncertain nonlinear time-delay cyberphysical systems. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4341–4353. [Google Scholar] [CrossRef]
- Ma, Z.; Ma, H. Adaptive fuzzy backstepping dynamic surface control of strict-feedback fractional-order uncertain nonlinear systems. IEEE Trans. Fuzzy Syst. 2020, 28, 122–133. [Google Scholar] [CrossRef]
- Yang, W.; Yu, W.; Lv, Y.; Zhu, L.; Hayat, T. Adaptive fuzzy tracking control design for a class of uncertain nonstrict-feedback fractional-order nonlinear SISO systems. IEEE Trans. Cybern. 2021, 51, 3039–3053. [Google Scholar] [CrossRef] [PubMed]
- Farrell, A.; Polycarpou, M.; Sharma, M.; Dong, W. Command Filtered Backstepping. IEEE Trans. Autom. Control 2009, 54, 1391–1395. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Wang, D.; Yu, H. Observer and command-filter-based adaptive fuzzy output feedback control of uncertain nonlinear systems. IEEE Trans. Ind. Electron. 2021, 62, 5962–5970. [Google Scholar] [CrossRef] [Green Version]
- Niu, B.; Liu, Y.; Zong, G.; Han, Z.; Fu, J. Command filter-based adaptive neural tracking controller design for uncertain switched nonlinear output-constrained systems. IEEE Trans. Cybern. 2017, 47, 3160–3171. [Google Scholar] [CrossRef]
- Xia, J.; Zhang, J.; Feng, J.; Wang, Z.; Zhaung, G. Command filter-based adaptive fuzzy control for nonlinear systems with unknown control directions. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1945–1953. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, N.; Liu, Y.; Zhao, X. Adaptive fault-tolerant control for switched nonlinear systems based on command filter technique. Appl. Math. Compt. 2022, 52, 12561–12570. [Google Scholar] [CrossRef]
- Wang, H.; Kang, S.; Zhao, X.; Xu, N.; Li, T. Command filter-based adaptive neural control design for nonstrict-feedback nonlinear systems with multiple actuator constraints. IEEE Trans. Cybern. 2021, 392, 125725. [Google Scholar] [CrossRef] [PubMed]
- Li, Y. Command filter adaptive asymptotic tracking of uncertain nonlinear systems with time-varying parameters and disturbances. IEEE Trans. Autom. Control 2022, 67, 2973–2980. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Cao, J.; Wang, H.; Zhou, Y. Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5166–5177. [Google Scholar] [CrossRef]
- You, X.; Dian, S.; Liu, K.; Guo, B.; Xiang, G.; Zhu, Y. Command filter-based adaptive fuzzy finite-time tracking control for uncertain fractional-order nonlinear systems. IEEE Trans. Fuzzy Syst. 2023, 31, 226–240. [Google Scholar] [CrossRef]
- Feng, T.; Wang, Y.; Liu, L.; Wu, B. Observer-based event-triggered control for uncertain fractional-order systems. J. Frankl. Inst. 2020, 357, 9423–9441. [Google Scholar] [CrossRef]
- Hu, T.; He, Z.; Zhang, X.; Zhong, S. Leader-following consensus of fractional-order multi-agent systems based on event-triggered control. Nonlinear Dyn. 2020, 99, 2219–2232. [Google Scholar] [CrossRef]
- Tripathy, M.; Mondal, D.; Biswas, K.; Scn, S. Design and performance study of phase-locked loop using fractional-order loop filter. Int. J. Circuit Theory Appl. 2015, 43, 776–792. [Google Scholar] [CrossRef]
- Cheng, S.; Liang, S.; Fan, Y. Distributed solving Sylvester equations with fractional order dynamics. Control Theory Technol. 2021, 19, 249–259. [Google Scholar] [CrossRef]
- Li, X.; He, J.; Wen, C.; Liu, X. Backstepping-based adaptive control of a class of uncertain incommensurate fractional-order nonlinear systems with external disturbance. IEEE Trans. Ind. Electron. 2022, 69, 4087–4095. [Google Scholar] [CrossRef]
- Kilbas, A.; Srivastava, H.; Trujillo, J. Theory and Applications of Fractional Differential Equations; Elsevier: Oxford, UK, 2006. [Google Scholar]
- Montseny, G. Diffusive Representation of Pseduo-Differential Time-Operators. Eur. Ser. Appl. Ind.-Math. Fract. Differ. Syst. Model. Methods Appl. 1998, 5, 159–175. [Google Scholar]
- Wang, L. Stable adaptive fuzzy control of nonlinear systems. IEEE Trans. Fuzzy Syst. 1993, 1, 146–155. [Google Scholar] [CrossRef]
- Sun, K.; Qiu, J.; Larimi, H.; Fu, Y. Event-triggered robust fuzzy adaptive finite-time control of nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 2021, 29, 1460–1471. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| case 1 | 11.889 | 167.56 | 221.70 | 7.2698 | 106.82 |
| case 2 | 18.867 | 124.94 | 235.26 | 6.6809 | 93.505 |
| c = 5 | 20.650 | 150.99 | 238.68 | 139.87 | 97.527 |
| c = 10 | 14.611 | 162.13 | 192.21 | 28.065 | 100.84 |
| c = 15 | 11.889 | 167.56 | 221.70 | 7.2698 | 106.82 |
| c = 20 | 10.360 | 168.65 | 202.19 | 8.3325 | 115.75 |
| G = 0.9 | 12.175 | 167.02 | 219.15 | 7.1657 | 106.41 |
| G = 0.8 | 11.889 | 167.56 | 221.70 | 7.2698 | 106.82 |
| G = 0.7 | 12.155 | 168.29 | 224.54 | 7.4307 | 106.66 |
| G = 0.6 | 12.126 | 168.92 | 227.02 | 7.5888 | 106.84 |
| k = 5 | 11.501 | 90.087 | 112.93 | 98.327 | 113.01 |
| k = 1 | 11.889 | 167.56 | 221.70 | 7.2698 | 106.82 |
| k = 0.5 | 12.640 | 189.28 | 247.04 | 3.3027 | 107.19 |
| k = 0.1 | 13.781 | 214.46 | 261.48 | 7.4787 | 109.44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, D.; Wang, Y. Fuzzy Adaptive Command-Filter Control of Incommensurate Fractional-Order Nonlinear Systems. Entropy 2023, 25, 893. https://doi.org/10.3390/e25060893
Gong D, Wang Y. Fuzzy Adaptive Command-Filter Control of Incommensurate Fractional-Order Nonlinear Systems. Entropy. 2023; 25(6):893. https://doi.org/10.3390/e25060893
Chicago/Turabian StyleGong, Dianjun, and Yong Wang. 2023. "Fuzzy Adaptive Command-Filter Control of Incommensurate Fractional-Order Nonlinear Systems" Entropy 25, no. 6: 893. https://doi.org/10.3390/e25060893