
A Novel Underwater Acoustic Target Identification Method Based on Spectral Characteristic Extraction via Modified Adaptive Chirp Mode Decomposition

Abstract
:1. Introduction
2. Theoretical Background
2.1. A Brief Introduction of VNCMD
2.2. ACMD
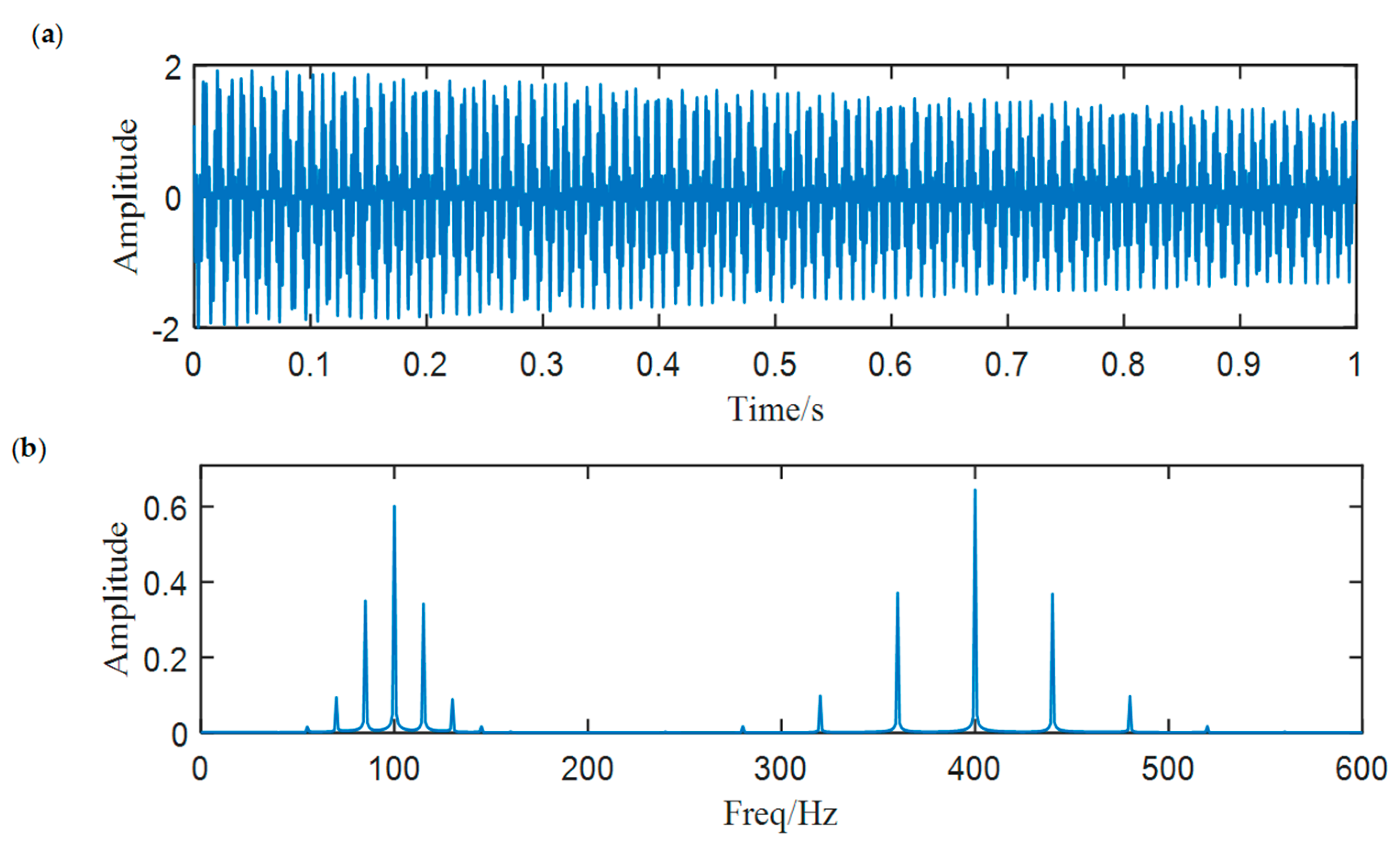
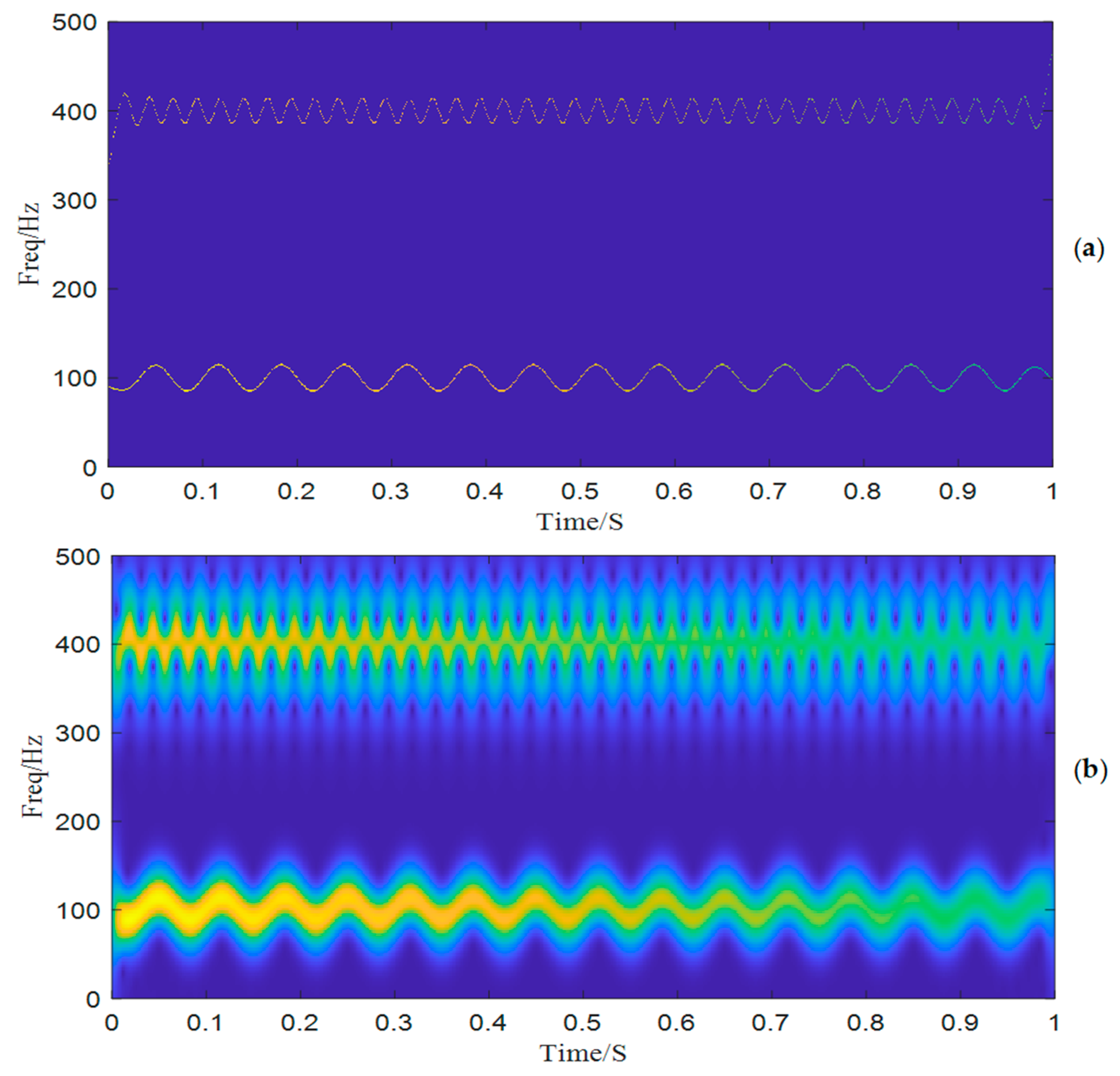
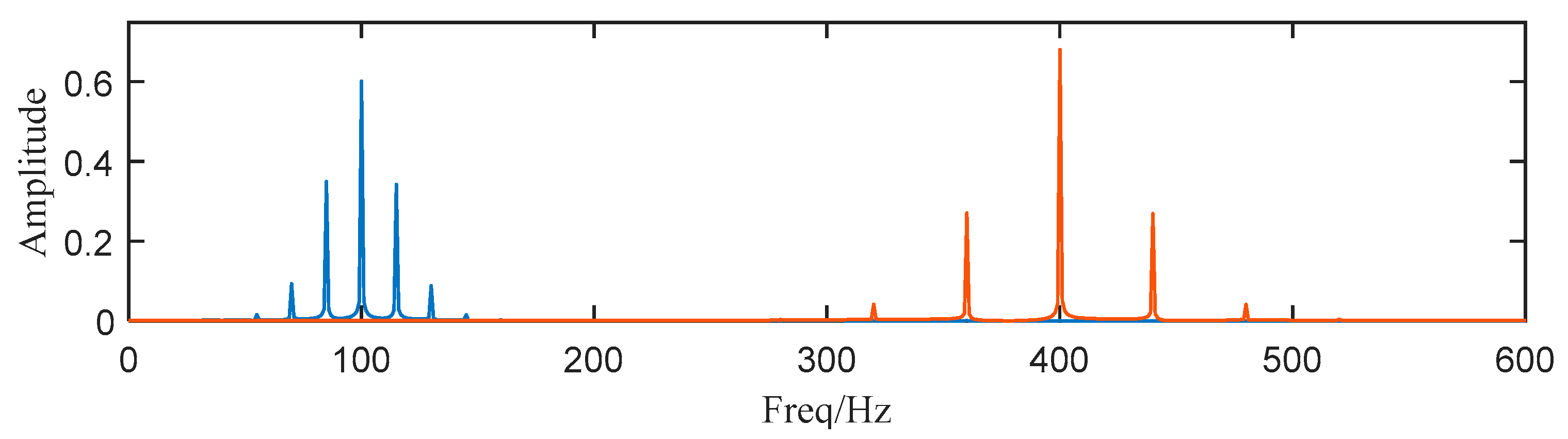
2.3. Simulation Validation
2.4. Limitation on Acoustic Feature Extraction
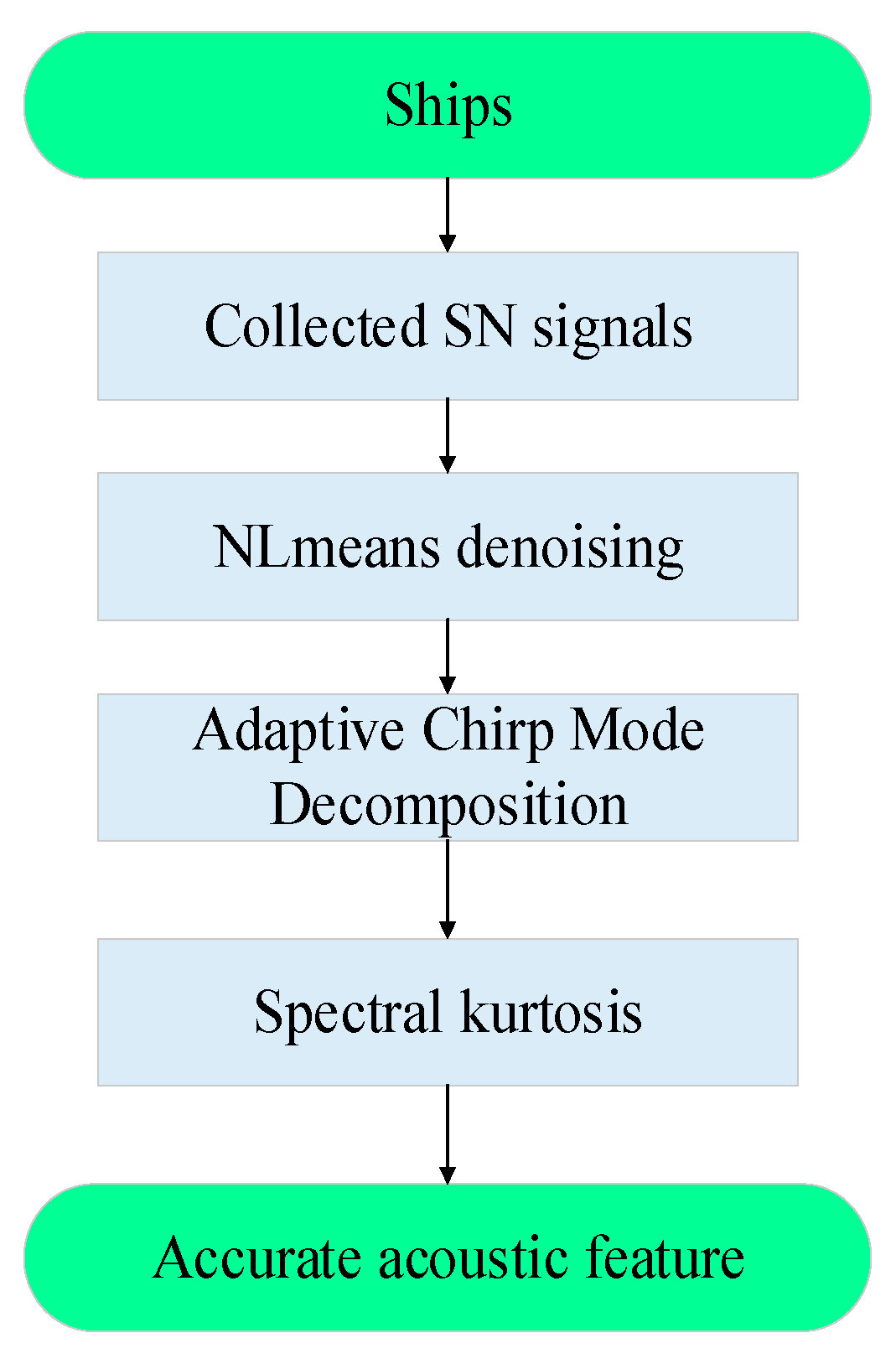
3. The Proposed Method
3.1. The Improved Non-Local Means
3.2. ACMD Algorithm
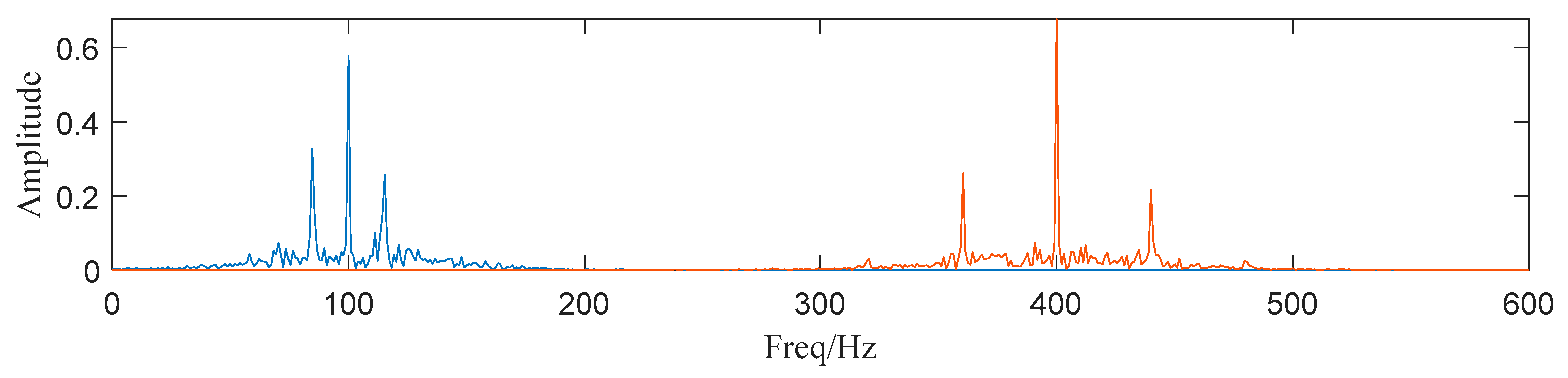
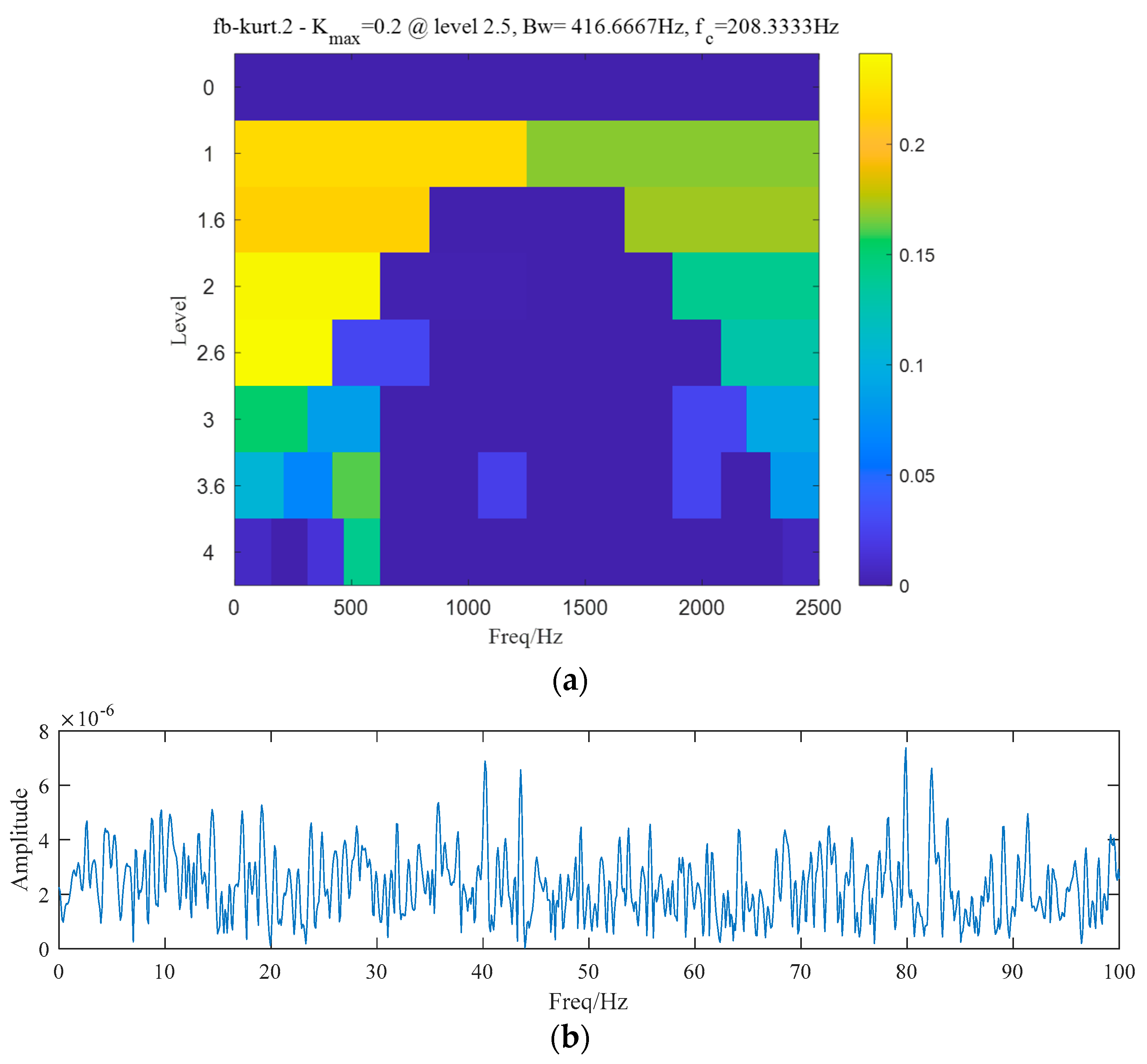
3.3. Component Selection Based on Spectral Kurtosis
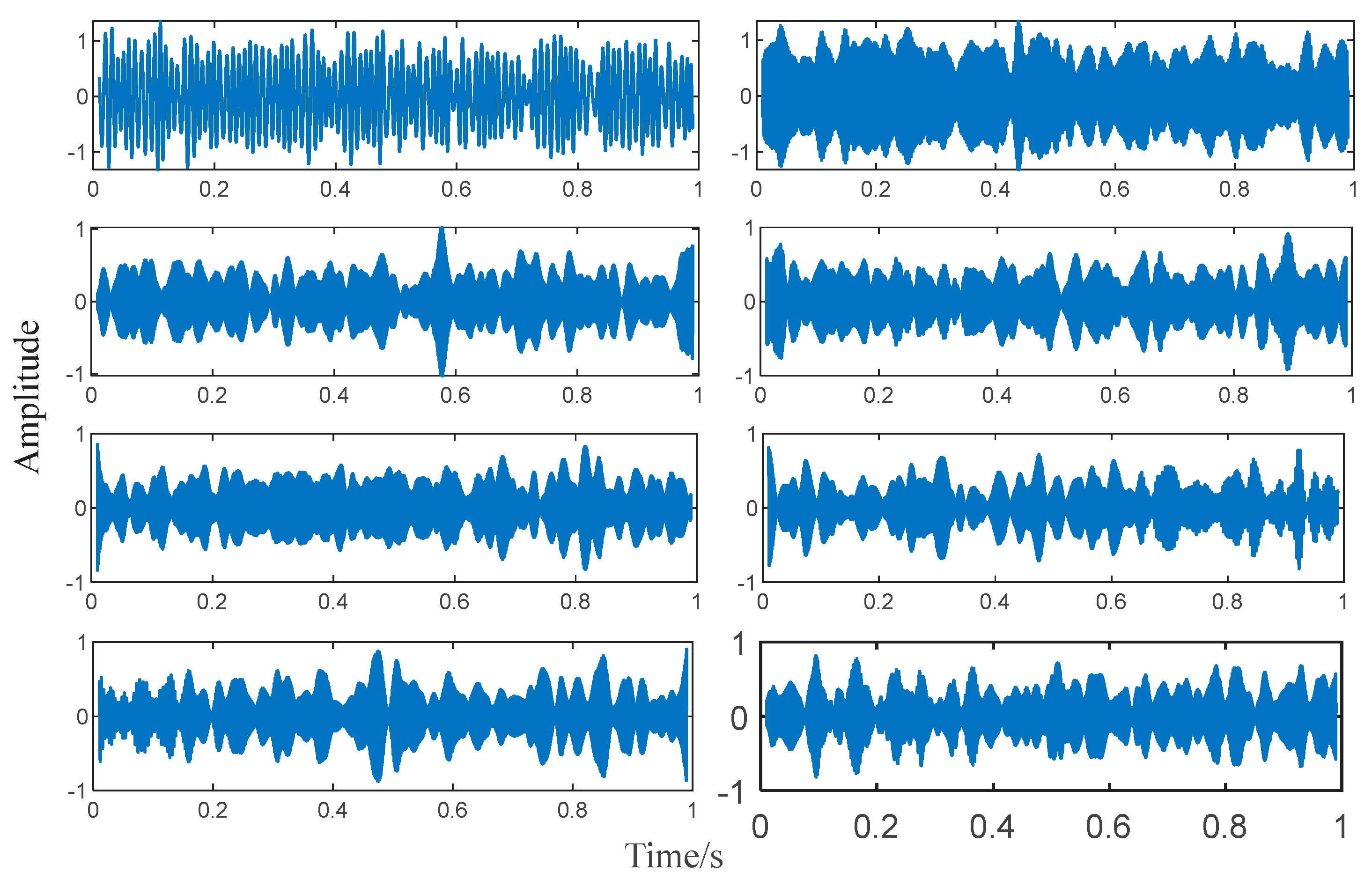
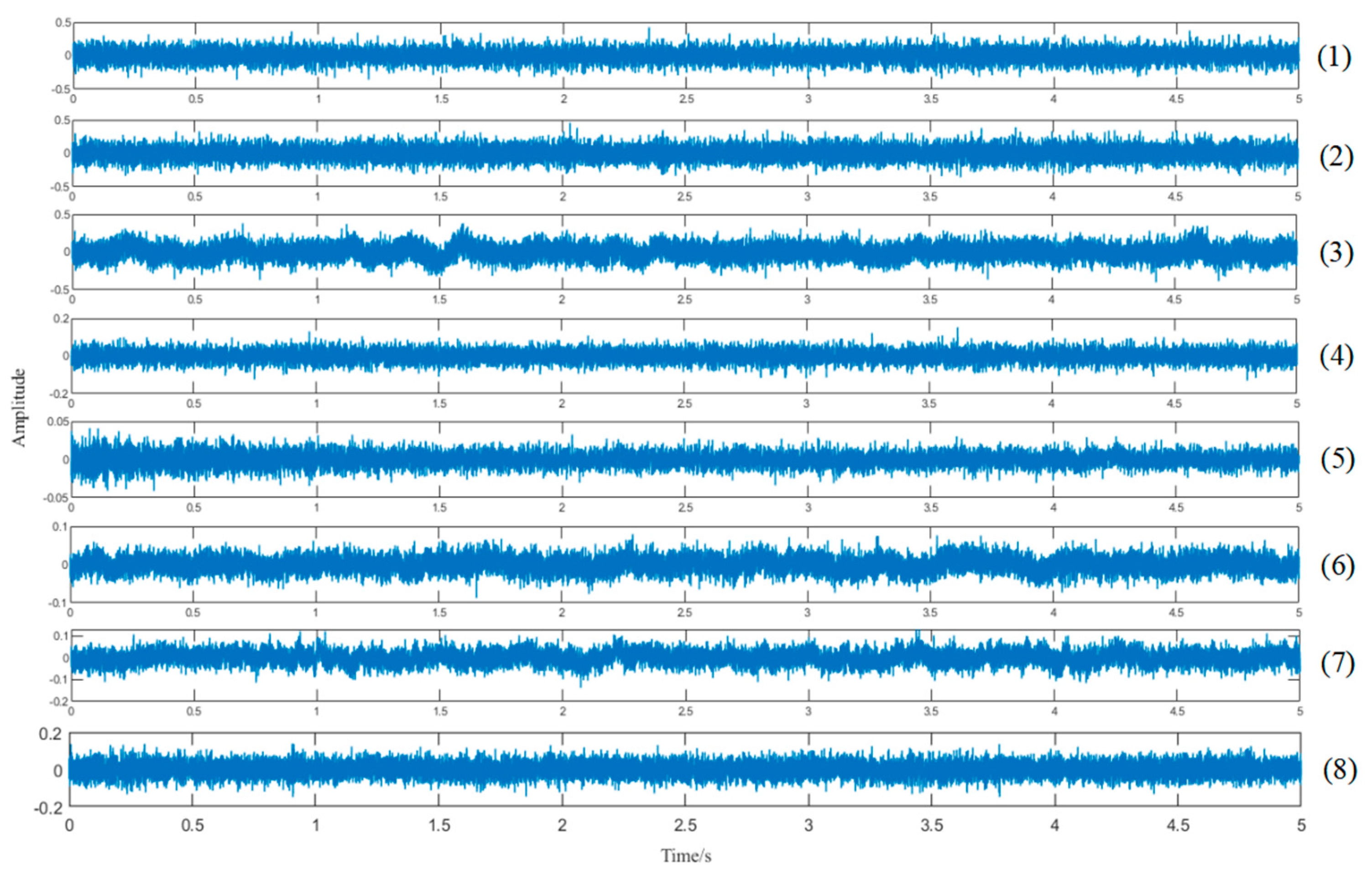
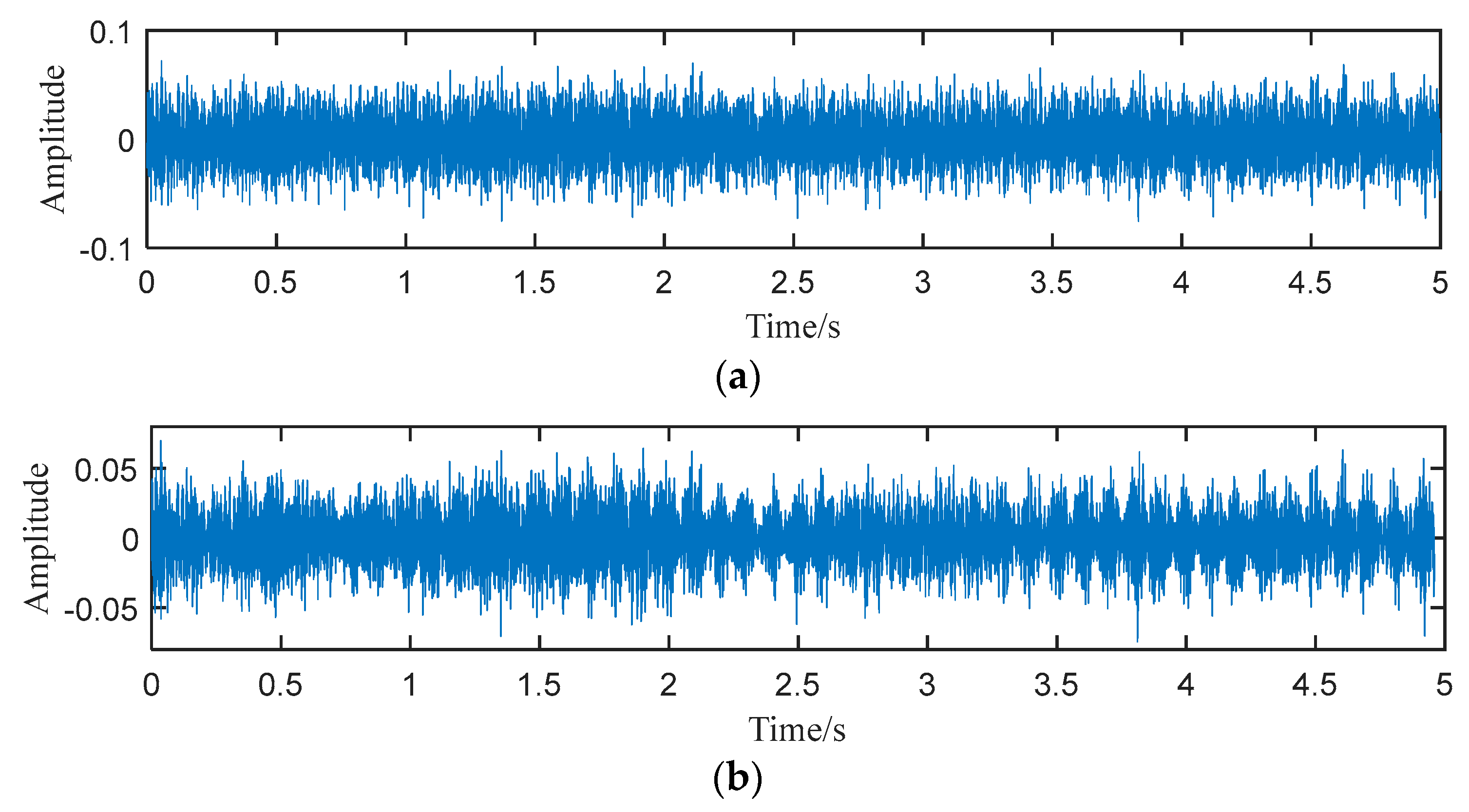
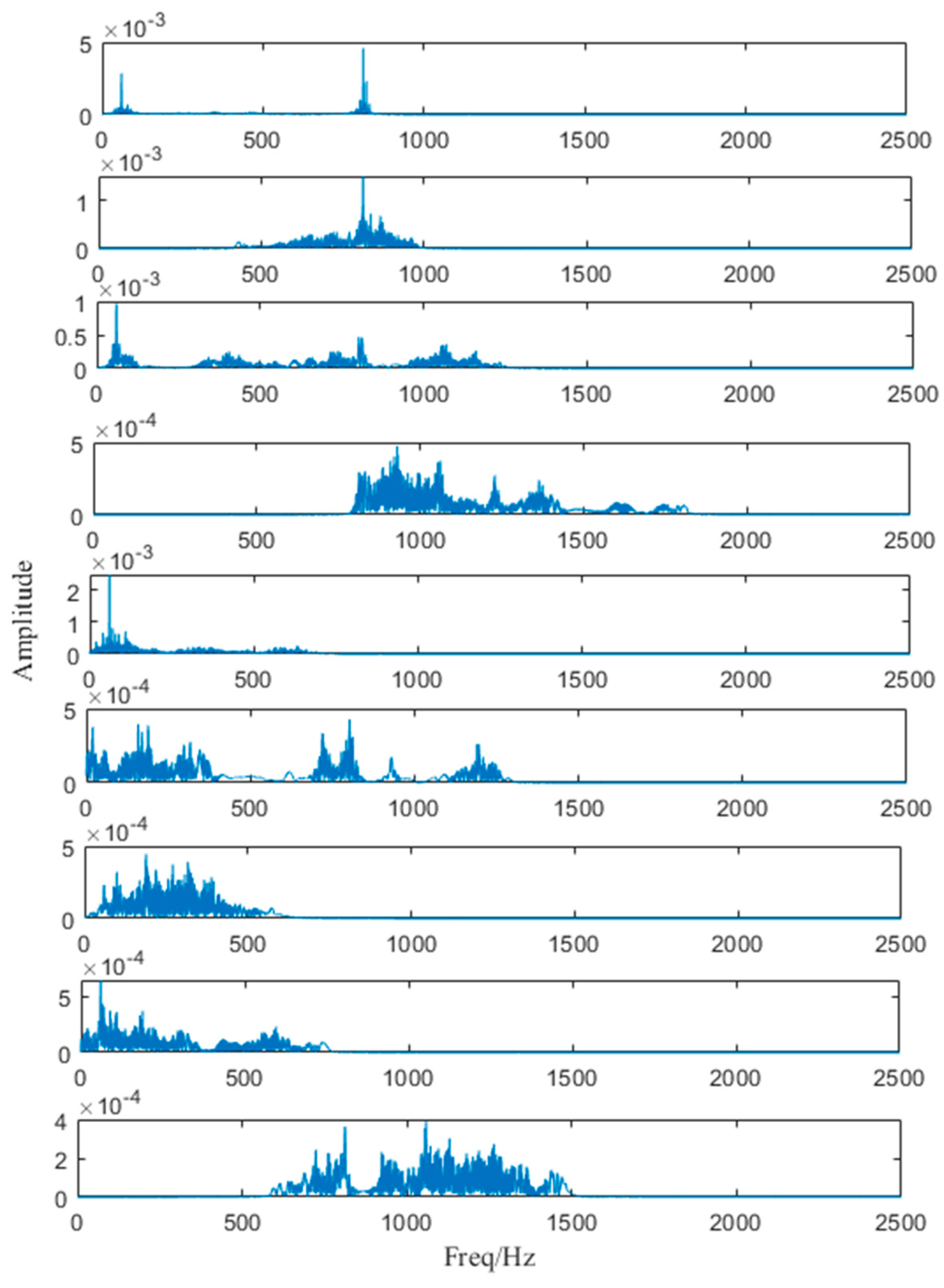
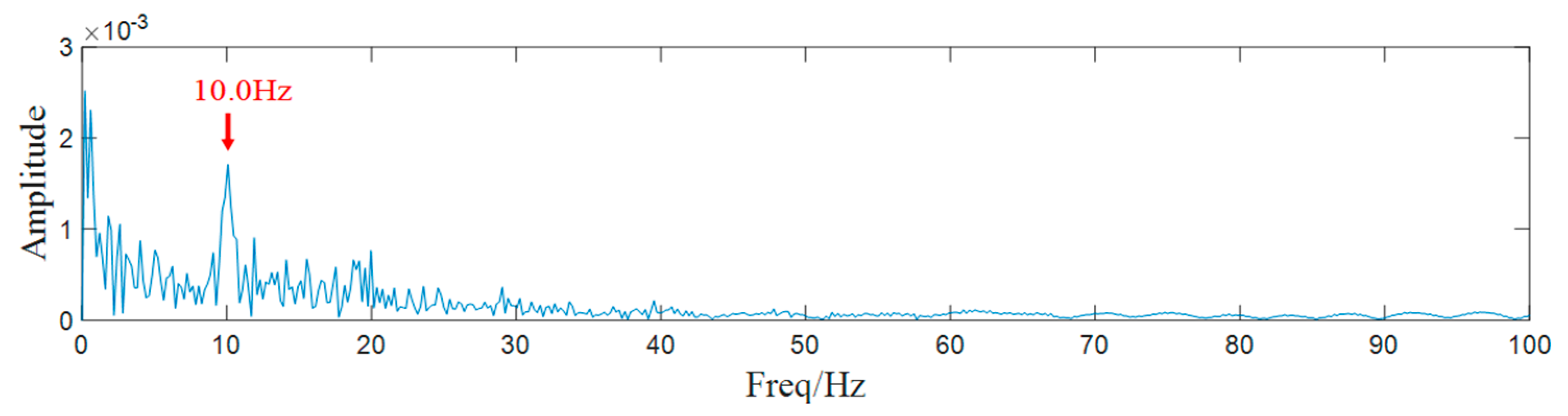
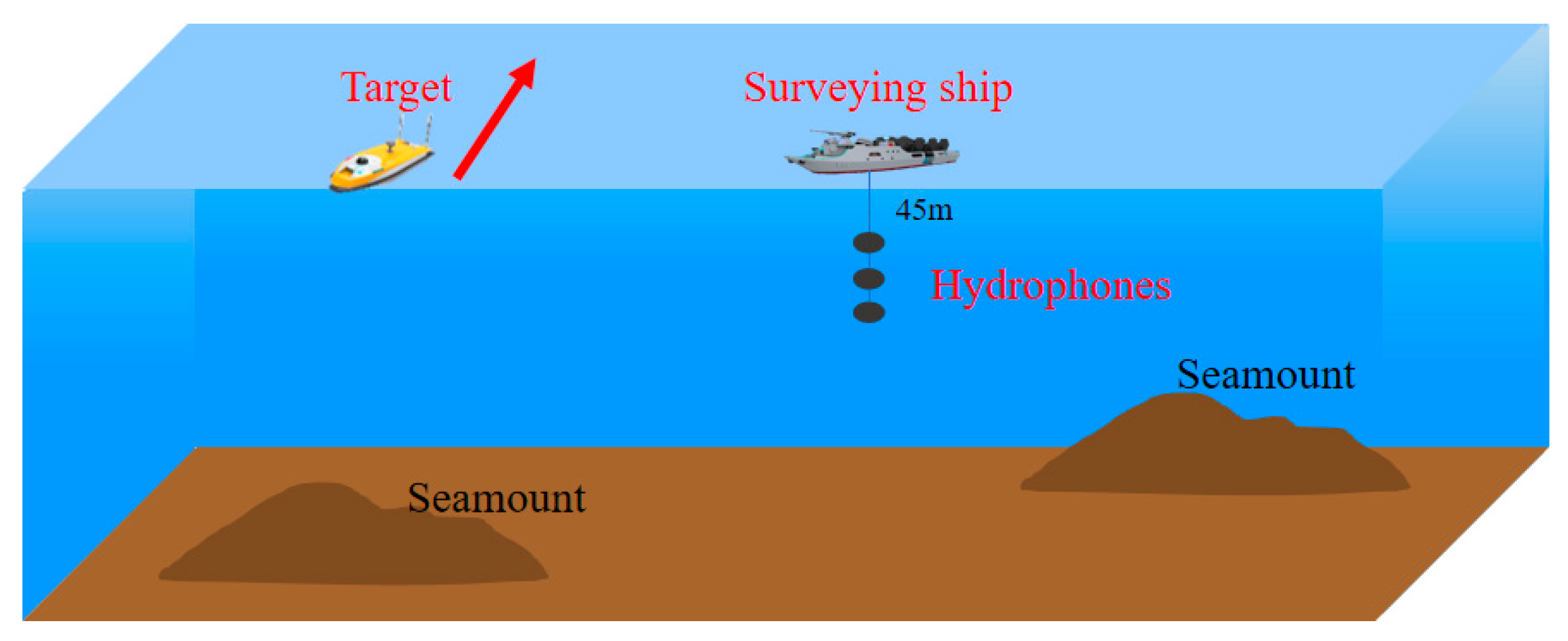
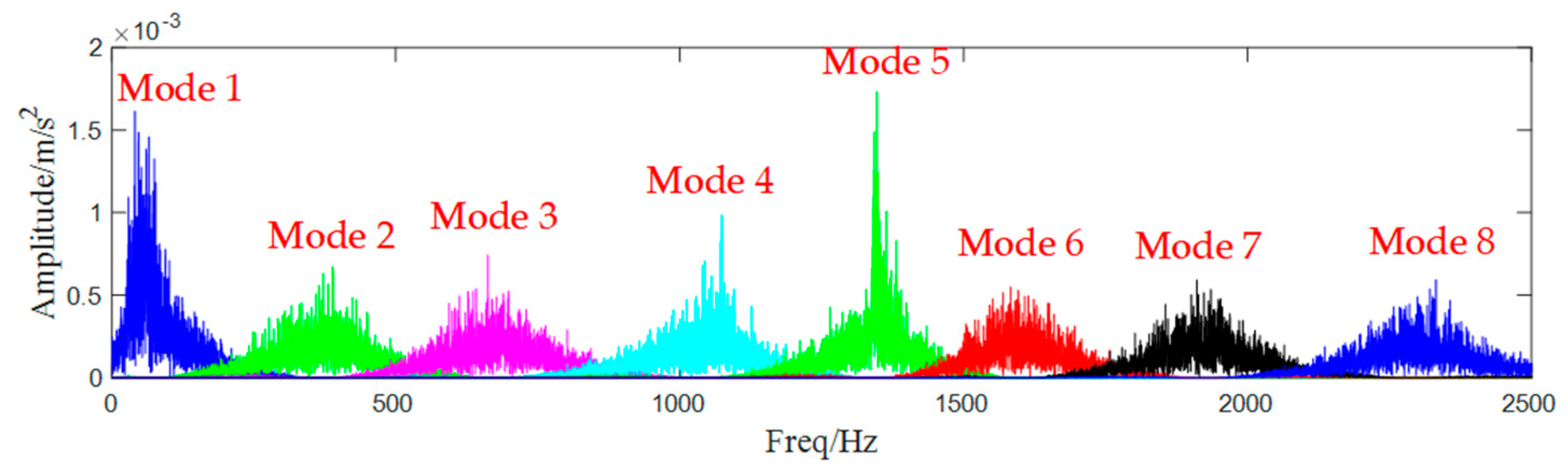
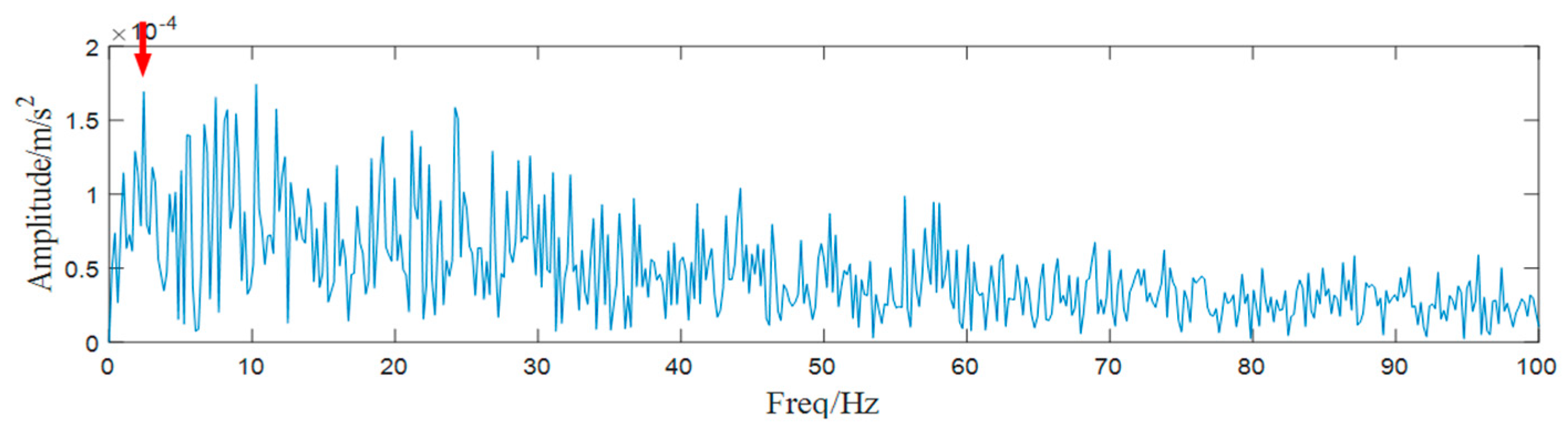
4. Applications
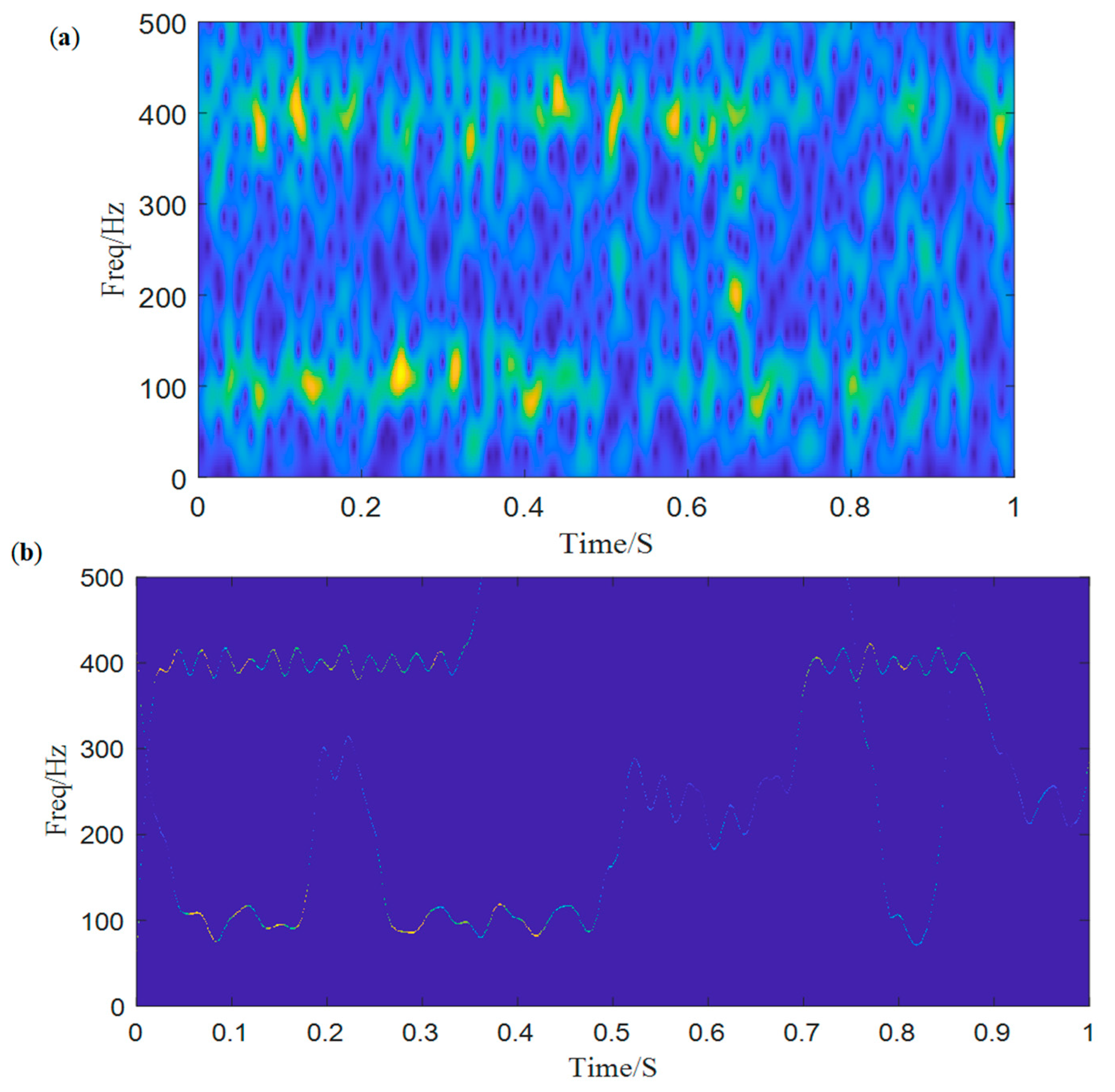
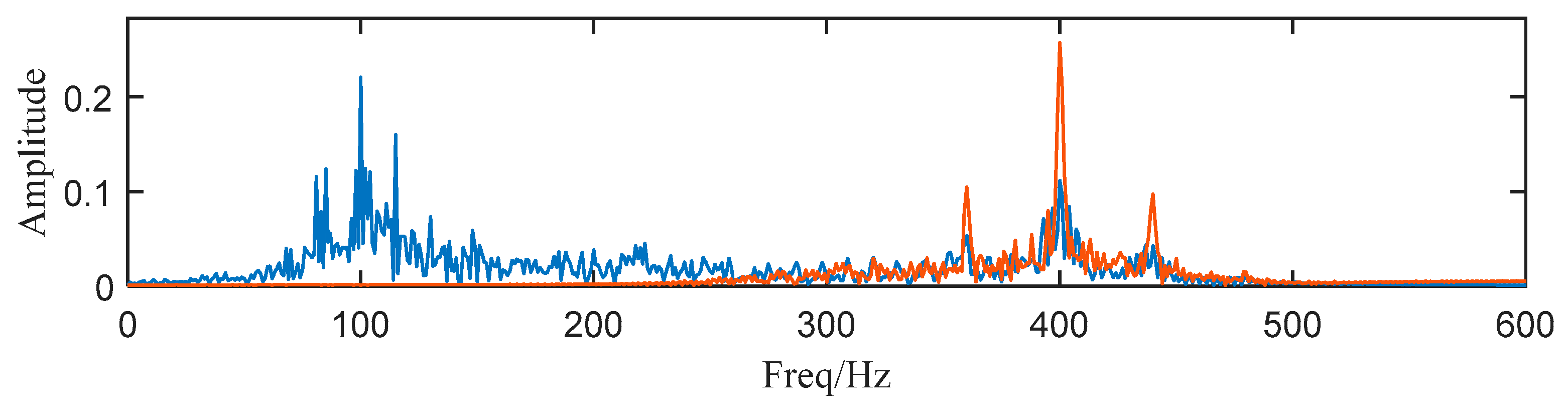
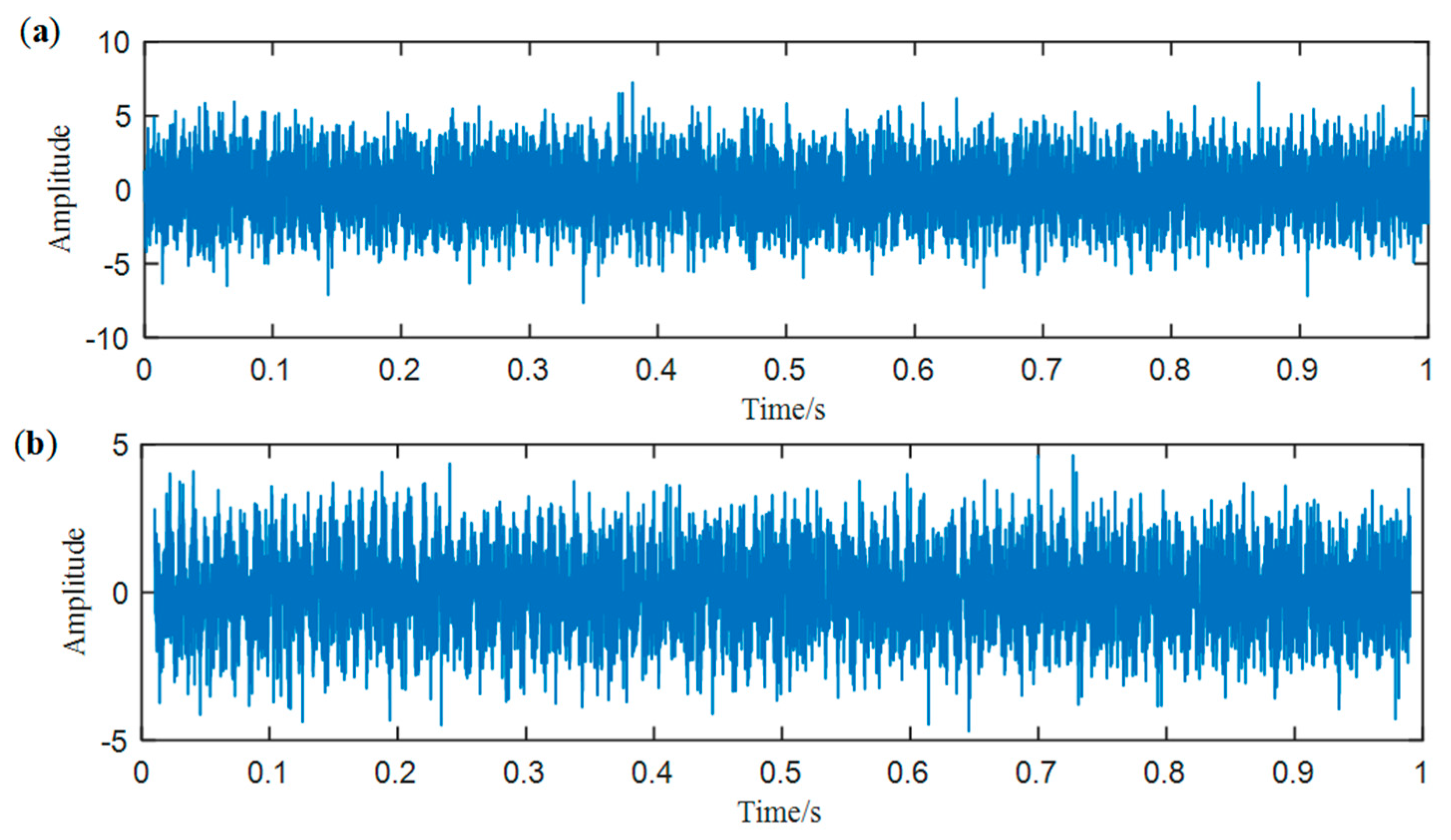
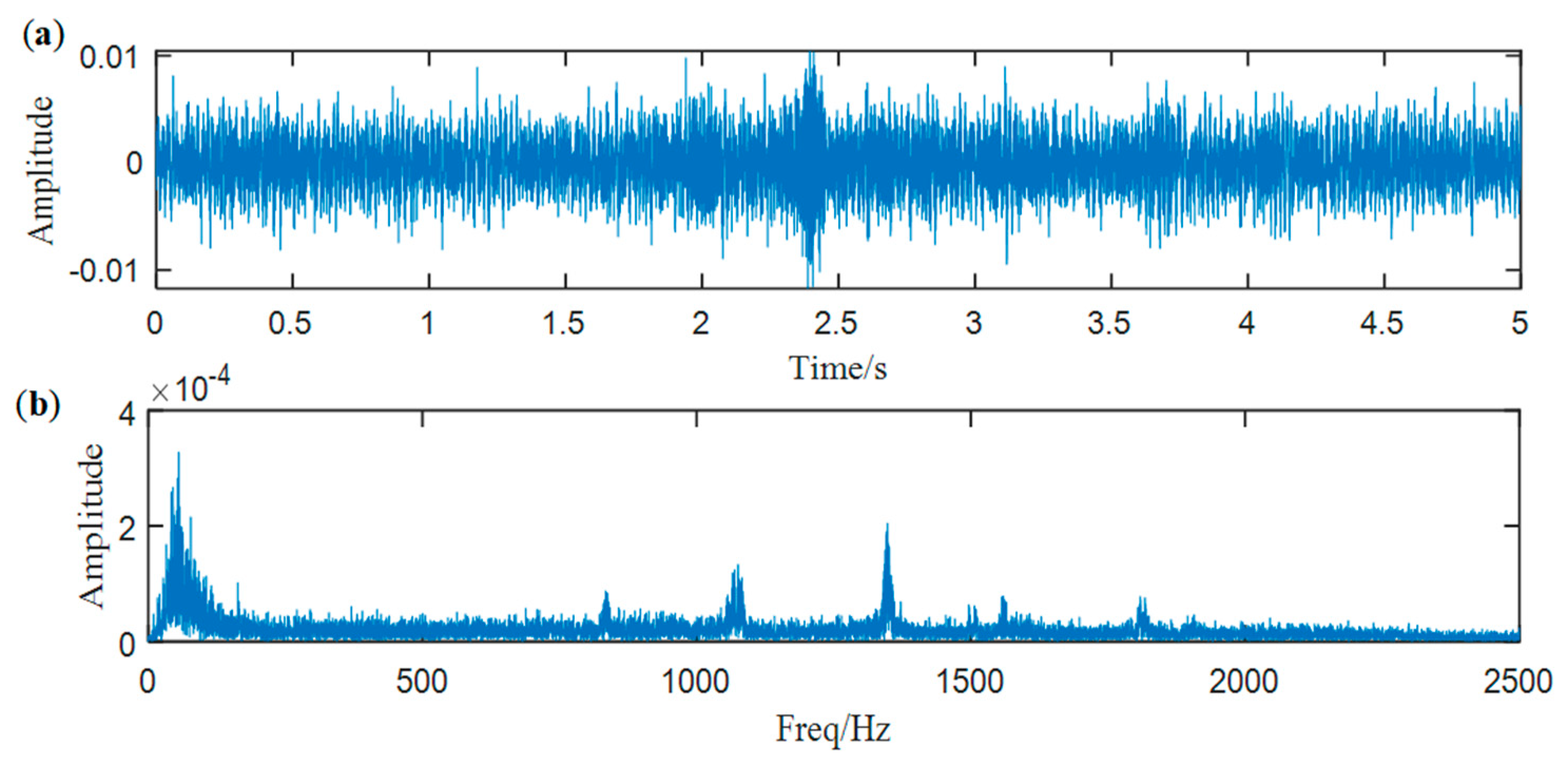
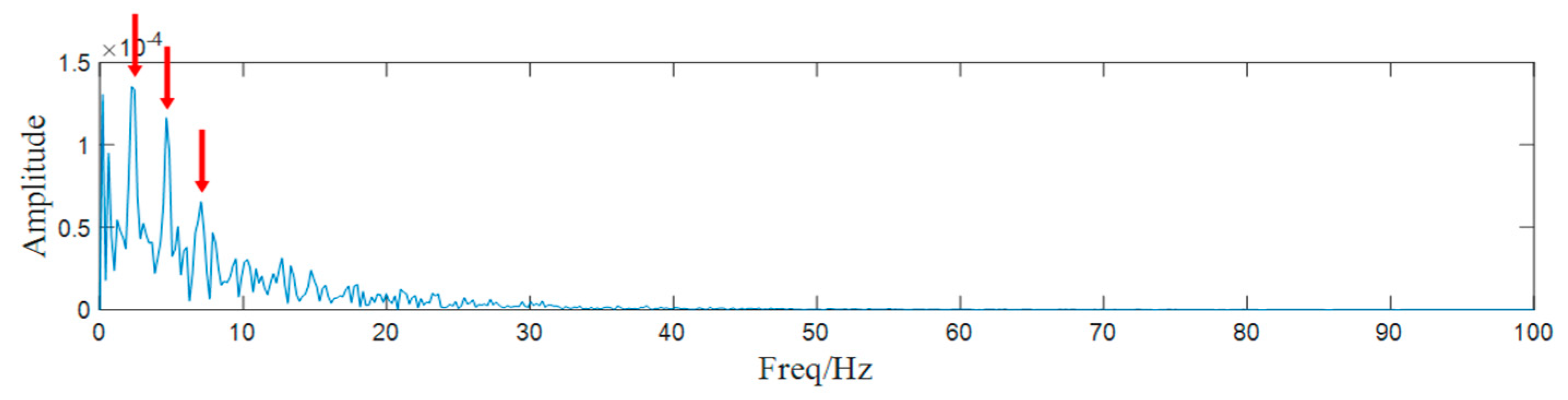
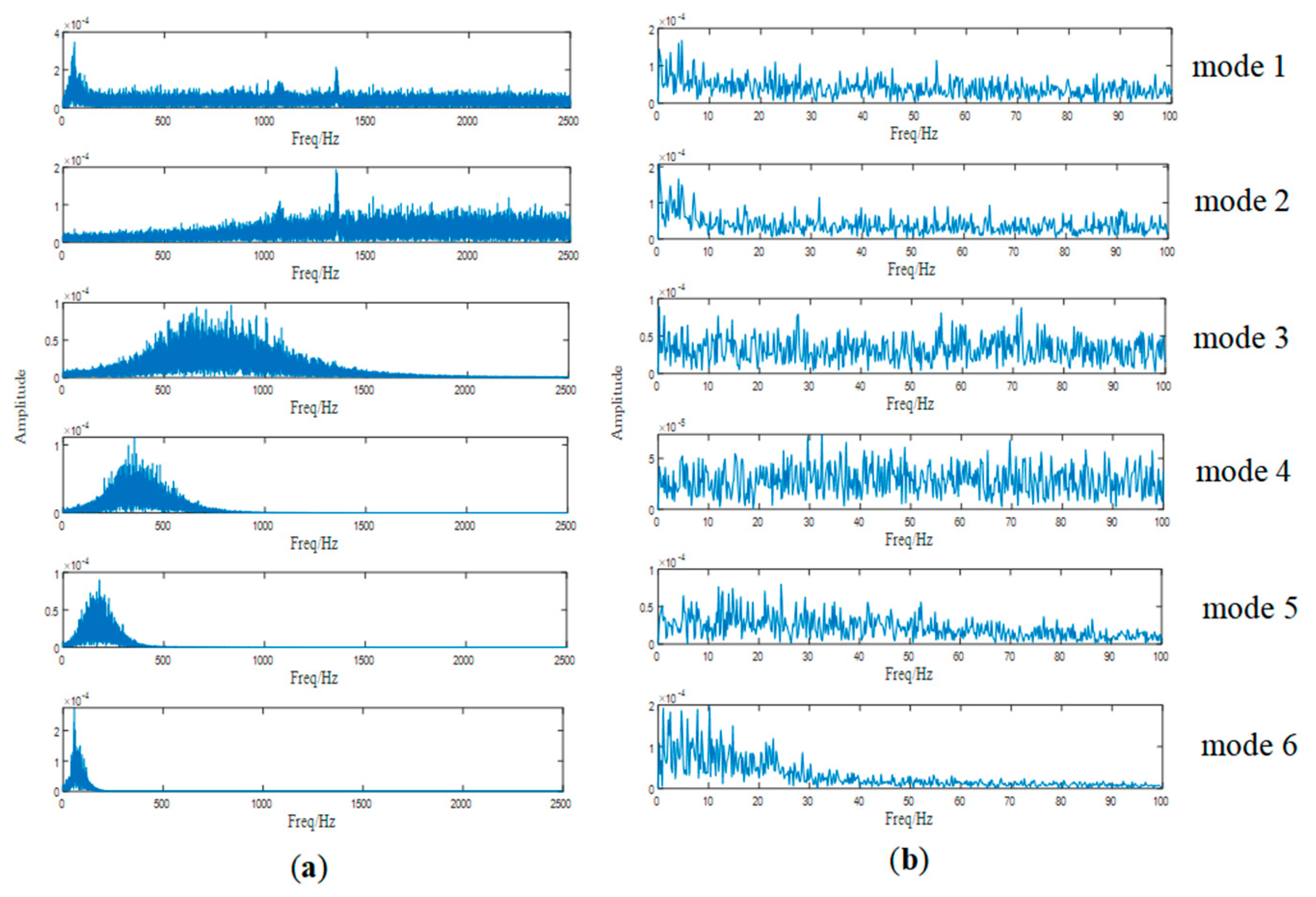
4.1. Data Collected by National Park Service
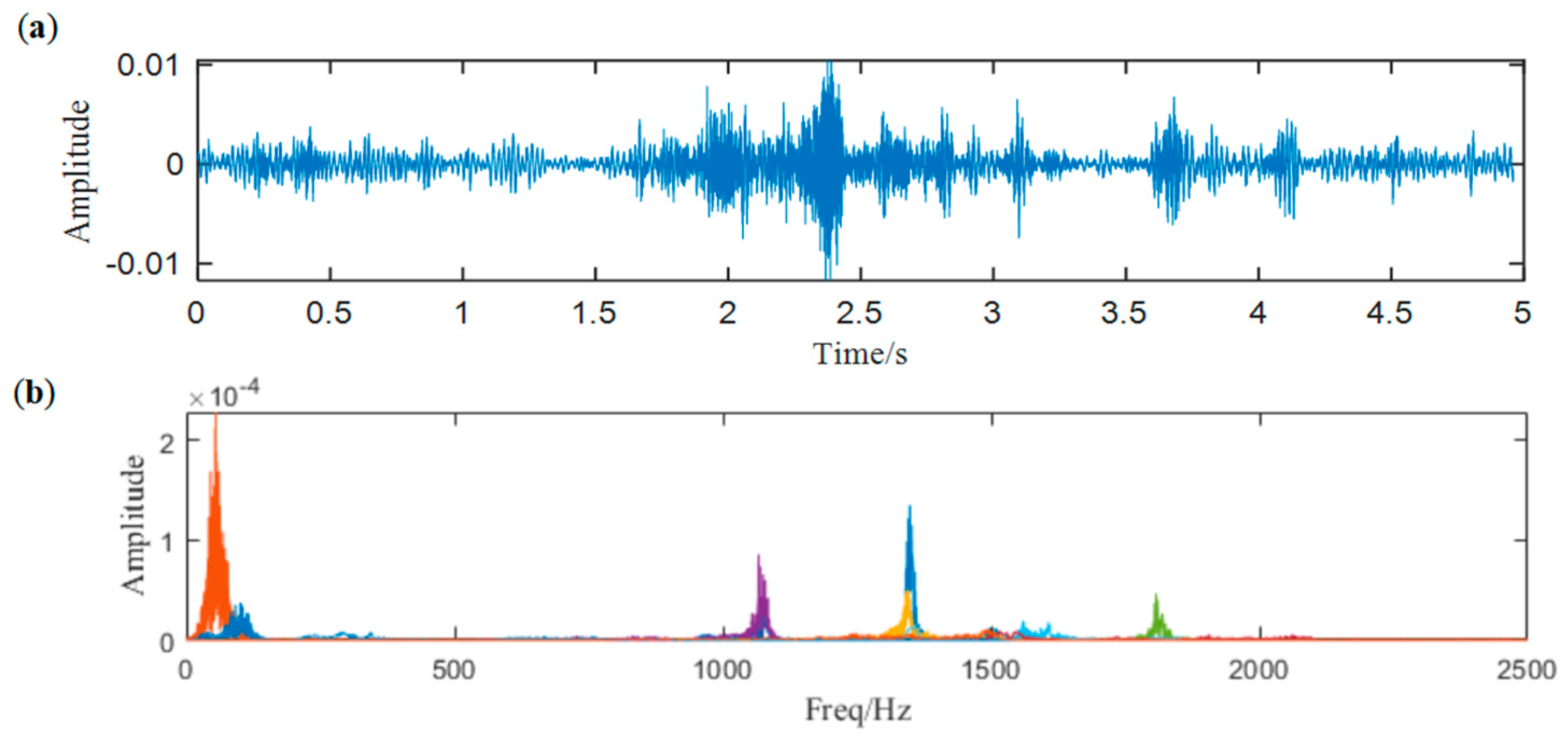
4.2. Data Collected by Our Own Hydrophones
5. Conclusions and Prospect
5.1. Conclusions
- We introduce ACMD to SN signal extraction and underwater acoustic target identification. Moreover, we build a new correlation-coefficient-based convergence criterion for ACMD instead of the energy of the residual signal.
- Considering heavy noise of real SN signals, we use NLmeans denoising to improve SNR. However, traditional weighting functions such as LECLERC, HUBER, and LOGISTIC neglect the distance distribution of neighborhoods, so we build a novel weighting function for NLmeans denoising. The modified algorithm has better potential for denoising.
- We choose SK rather than energy-based criteria as a mode selection criterion because SK is sensitive to ship operation features and insensitive to noise and unexpected interference. The simulation and two cases in Section 4 prove the effectiveness of SK.
- Both the simulation experiments and real cases show the superiority of the proposed method in weak feature extraction.
5.2. Prospect
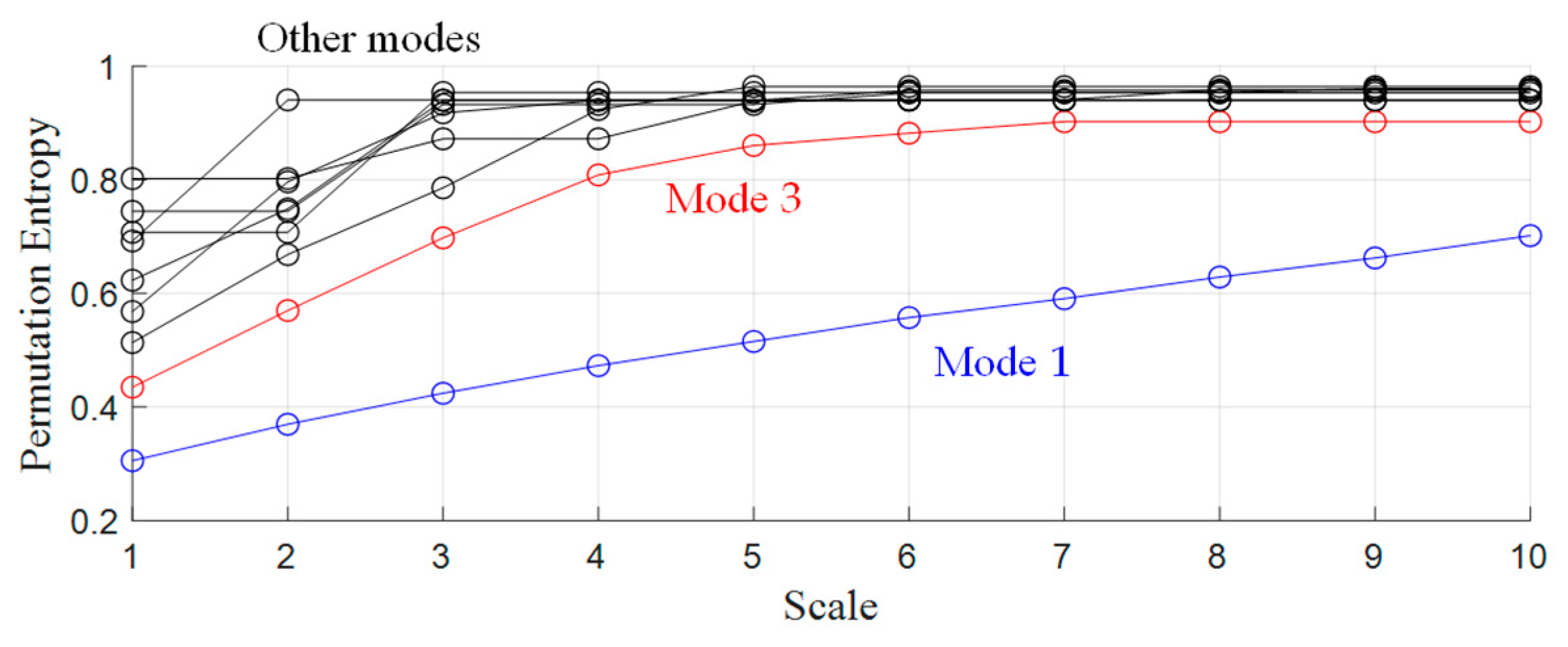
- Sensitive mode selection criteria, such as entropy-based criteria [40,41], can be built and used to assist the feature extraction. Since entropy reflects the degree of disorder of a time series, we can build and calculate the entropy-based index of each mode and choose those modes with the smallest value of the index for demodulation analysis. Take multi-scale permutation entropy (MPE) [42] as a brief example. We calculated the MPE of all 9 modes obtained in case 2 and the result is shown in Figure 23 as follows:
- 2.
- ACMD is also a suitable pre-processing method to obtain characteristic modes and can be combined with self-organizing ship identification methods, such as the entropy-based methods. For real SN signals, we can choose a certain mode (such as the first obtained mode by ACMD) and calculate its entropy for ship identification [43]. It is also feasible to calculate entropies of all modes and input them into an artificial neural network for automatic identification.
- 3.
- New signal decomposition methods should be proposed. Actually, VMD-based methods, such as VNCMD, FMD and ACMD, can be regarded as constrained optimization problems. Considering that entropy is a significant optimization objective, we can propose new signal decomposition methods by structuring entropy-based objective function and solving the constrained optimization problem.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Wei, Z.; Zhao, L.; Zhang, X.; Lv, W. Jointly optimizing ocean shipping routes and sailing speed while considering involuntary and voluntary speed loss. Ocean Eng. 2022, 245, 110460. [Google Scholar] [CrossRef]
- McIntyre, D.; Lee, W.; Frouin-Mouy, H.; Hannay, D.; Oshkai, P. Influence of propellers and operating conditions on underwater radiated noise from coastal ferry vessels. Ocean Eng. 2021, 232, 109075. [Google Scholar] [CrossRef]
- Li, Y.; Tang, B.; Jiao, S. Optimized ship-radiated noise feature extraction approaches based on CEEMDAN and slope entropy. Entropy 2022, 24, 1265. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Chen, J.; Zi, Y.; Pan, J. Independence-oriented VMD to identify fault feature for wheel set bearing fault diagnosis of high speed locomotive. Mech. Syst. Signal Proc. 2017, 85, 512–529. [Google Scholar] [CrossRef]
- Pan, J.; Chen, J.; Zi, Y.; Li, Y.; He, Z. Mono-component feature extraction for mechanical fault diagnosis using modified empirical wavelet transform via data-driven adaptive Fourier spectrum segment. Mech. Syst. Signal Proc. 2016, 72, 160–183. [Google Scholar] [CrossRef]
- Huang, N.; Shen, Z.; Long, S.; Wu, M.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Yu, D.; Cheng, J.; Yang, Y. Application of EMD method and Hilbert spectrum to the fault diagnosis of roller bearings. Mech. Syst. Signal Proc. 2005, 19, 259–270. [Google Scholar] [CrossRef]
- Rai, V.K.; Mohanty, A.R. Bearing fault diagnosis using FFT of intrinsic mode functions in Hilbert–Huang transform. Mech. Syst. Signal Proc. 2007, 21, 2607–2615. [Google Scholar] [CrossRef]
- Wang, T.; Lin, L.; Zhang, A.; Peng, X.; Chang’an, A.Z. EMD-based EEG signal enhancement for auditory evoked potential recovery under high stimulus-rate paradigm. Biomed. Signal Process. Control 2013, 8, 858–868. [Google Scholar] [CrossRef]
- Das, A.B.; Bhuiyan, M.I.H. Discrimination and classification of focal and non-focal EEG signals using entropy-based features in the EMD-DWT domain. Biomed. Signal Process. Control 2016, 29, 11–21. [Google Scholar] [CrossRef]
- Yang, L. A empirical mode decomposition approach to feature extraction of ship-radiated noise. In Proceedings of the IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25 May 2009. [Google Scholar]
- Yang, H.; Li, Y.; Li, G. Energy analysis of ship-radiated noise based on ensemble empirical mode decomposition. J. Vib. Shock 2015, 34, 55–59. [Google Scholar]
- Yang, H.; Li, L.; Li, G.; Guan, Q. A novel feature extraction method for ship-radiated noise. Def. Technol. 2021, 18, 604–617. [Google Scholar] [CrossRef]
- Zheng, J.; Pan, H. Mean-optimized mode decomposition: An improved EMD approach for non-stationary signal processing. ISA Trans. 2020, 106, 392–401. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Li, Y.; Chen, X. Ships’ radiated noise feature extraction based on EEMD. J. Vib. Shock 2017, 36, 114–119. [Google Scholar]
- Li, Y.; Wang, L. A novel noise reduction technique for underwater acoustic signals based on complete ensemble empirical mode decomposition with adaptive noise, minimum mean square variance criterion and least mean square adaptive filter. Def. Technol. 2020, 16, 543–554. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, M.; Zhang, S.; Zhou, T. Underwater multi-target passive detection based on transient signals using adaptive empirical mode decomposition. Appl. Acoust. 2022, 190, 108641. [Google Scholar] [CrossRef]
- Spinosa, E.; Iafrati, A. A noise reduction method for force measurements in water entry experiments based on the Ensemble Empirical Mode Decomposition. Mech. Syst. Signal Proc. 2022, 168, 108659. [Google Scholar] [CrossRef]
- Lu, T.; Yu, F.; Wang, J.; Wang, X.; Mudugamuwa, A.; Wang, Y.; Han, B. Application of adaptive complementary ensemble local mean decomposition in underwater acoustic signal processing. Appl. Acoust. 2021, 178, 107966. [Google Scholar] [CrossRef]
- Li, Y.; Jiao, S.; Gao, X. A novel signal feature extraction technology based on empirical wavelet transform and reverse dispersion entropy. Def. Technol. 2021, 17, 1625–1635. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X.; Yu, J. A novel feature extraction method for ship-radiated noise based on variational mode decomposition and multi-scale permutation entropy. Entropy 2017, 19, 342. [Google Scholar] [CrossRef]
- Li, G.; Hou, Y.; Yang, H. A novel method for frequency feature extraction of ship radiated noise based on variational mode decomposition, double coupled Duffing chaotic oscillator and multivariate multiscale dispersion entropy. Alex. Eng. J. 2022, 61, 6329–6347. [Google Scholar] [CrossRef]
- Yang, H.; Cheng, Y.; Li, G. A denoising method for ship radiated noise based on Spearman variational mode decomposition, spatial-dependence recurrence sample entropy, improved wavelet threshold denoising, and Savitzky-Golay filter. Alex. Eng. J. 2021, 60, 3379–3400. [Google Scholar] [CrossRef]
- Xie, D.; Hong, S.; Yao, C. Optimized variational mode decomposition and permutation entropy with their application in feature extraction of ship-radiated noise. Entropy 2021, 23, 503. [Google Scholar] [CrossRef]
- Chen, S.; Wang, K.; Chang, C.; Xie, B.; Zhai, W. A two-level adaptive chirp mode decomposition method for the railway wheel flat detection under variable-speed conditions. J. Sound Vib. 2021, 498, 115963. [Google Scholar] [CrossRef]
- Chen, S.; Yang, Y.; Peng, Z.; Wang, S.; Zhang, W.; Chen, X. Detection of rub-impact fault for rotor-stator systems: A novel method based on adaptive chirp mode decomposition. J. Sound Vib. 2019, 440, 83–99. [Google Scholar] [CrossRef]
- Yang, Q.; Ruan, J.; Zhuang, Z. Fault diagnosis for circuit-breakers using adaptive chirp mode decomposition and attractor’s morphological characteristics. Mech. Syst. Signal Proc. 2020, 145, 106921. [Google Scholar] [CrossRef]
- Srivastava, A.K.; Tiwari, M.; Singh, A. Identification of rotor-stator rub and dependence of dry whip boundary on rotor parameters. Mech. Syst. Signal Proc. 2021, 159, 107845. [Google Scholar] [CrossRef]
- Ma, Z.; Lu, F.; Liu, S.; Li, X. A parameter-adaptive ACMD method based on particle swarm optimization algorithm for rolling bearing fault diagnosis under variable speed. J. Mech. Sci. Technol. 2021, 35, 1851–1865. [Google Scholar] [CrossRef]
- Ding, C.; Wang, B. Sparsity-assisted adaptive chirp mode decomposition and its application in rub-impact fault detection. Measurement 2022, 188, 110539. [Google Scholar] [CrossRef]
- Wei, S.; Wang, D.; Peng, Z.; Feng, Z. Variational nonlinear component decomposition for fault diagnosis of planetary gearboxes under variable speed conditions. Mech. Syst. Signal Proc. 2022, 162, 108016. [Google Scholar] [CrossRef]
- Tu, G.; Dong, X.; Chen, S.; Zhao, B.; Hu, L.; Peng, Z. Iterative nonlinear chirp mode decomposition: A Hilbert-Huang transform-like method in capturing intra-wave modulations of nonlinear responses. J. Sound Vib. 2020, 485, 115571. [Google Scholar] [CrossRef]
- Huang, J.; Cui, L.; Zhang, J. Novel morphological scale difference filter with application in localization diagnosis of outer raceway defect in rolling bearings. Mech. Mach. Theory 2023, 184, 105288. [Google Scholar] [CrossRef]
- Li, S.; Cheng, L.; Zhang, T.; Zhao, H.; Li, J. Graph-guided Bayesian matrix completion for ocean sound speed field reconstruction. J. Acoust. Soc. Am. 2023, 153, 689–710. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Huang, J.; Zhang, H.; Liao, B. Direction of Arrival Estimation of Acoustic Sources with Unmanned Underwater Vehicle Swarm via Matrix Completion. Remote Sens. 2022, 14, 3790. [Google Scholar] [CrossRef]
- Buades, A.; Coll, B.; Morel, J.M. A review of image denoising algorithms, with a new one. Multiscale Model. Simul. 2005, 4, 490–530. [Google Scholar] [CrossRef]
- Pan, J.; Chen, J.; Zi, Y.; Yuan, J.; Chen, B.; He, Z. Data-driven mono-component feature identification via modified nonlocal means and MEWT for mechanical drivetrain fault diagnosis. Mech. Syst. Signal Proc. 2016, 80, 533–552. [Google Scholar] [CrossRef]
- Wang, D. Spectral L2/L1 norm: A new perspective for spectral kurtosis for characterizing non-stationary signals. Mech. Syst. Signal Proc. 2018, 104, 290–293. [Google Scholar] [CrossRef]
- Li, H.; Wu, X.; Liu, T.; Li, S.; Zhang, B.; Zhou, G.; Huang, T. Composite fault diagnosis for rolling bearing based on parameter-optimized VMD. Measurement 2022, 201, 111637. [Google Scholar] [CrossRef]
- Li, Z.; Li, Y.; Zhang, K.; Guo, J. A Novel Improved Feature Extraction Technique for Ship-Radiated Noise Based on IITD and MDE. Entropy 2019, 21, 1215. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X.; Yu, J. Denoising and Feature Extraction Algorithms Using NPE Combined with VMD and Their Applications in Ship-Radiated Noise. Symmetry 2017, 9, 256. [Google Scholar] [CrossRef]
- Li, Y.; Geng, B.; Tang, B. Simplified coded dispersion entropy: A nonlinear metric for signal analysis. Nonlinear Dyn. 2023, 111, 9327–9344. [Google Scholar] [CrossRef]
- Ouyang, G.; Li, J.; Liu, X.; Li, X. Dynamic characteristics of absence EEG recordings with multiscale permutation entropy analysis. Epilepsy Res. 2013, 104, 246–252. [Google Scholar] [CrossRef] [PubMed]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
| 1360.1 | 2240.6 | 7.9 | 10.1 | 6.62 | 16.6 | 7.8 | 6.8 |
| Method | Effective Signals | Samples | Accuracy |
|---|---|---|---|
| M-ACMD | 8 | 8 | 100% |
| SK | 5 | 8 | 62.5% |
| The Proposed Method | SK | EEMD | Parameter-Optimized VMD [1] | |
|---|---|---|---|---|
| Case1 (25,000 points) | 90.22 | 1.65 | / | / |
| Case2 (25,000 points) | 85.47 | / | 45.77 | 360.47 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Yang, K.; Zhou, X.; Duan, S. A Novel Underwater Acoustic Target Identification Method Based on Spectral Characteristic Extraction via Modified Adaptive Chirp Mode Decomposition. Entropy 2023, 25, 669. https://doi.org/10.3390/e25040669
Li Z, Yang K, Zhou X, Duan S. A Novel Underwater Acoustic Target Identification Method Based on Spectral Characteristic Extraction via Modified Adaptive Chirp Mode Decomposition. Entropy. 2023; 25(4):669. https://doi.org/10.3390/e25040669
Chicago/Turabian StyleLi, Zipeng, Kunde Yang, Xingyue Zhou, and Shunli Duan. 2023. "A Novel Underwater Acoustic Target Identification Method Based on Spectral Characteristic Extraction via Modified Adaptive Chirp Mode Decomposition" Entropy 25, no. 4: 669. https://doi.org/10.3390/e25040669